50
Elektronika dla Wszystkich
Do czego to służy?
Gdy budujemy system mikroprocesorowy,
który w założeniach ma być obsługiwany
przez człowieka, do przekazywania mu infor-
macji zwykle używamy klawiatur. Są to kla-
wiatury dołączone wprost do wyprowadzeń
mikroprocesora i masy lub plusa zasilania lub
też matrycowe. W obu przypadkach zajmują
one niemało wyprowadzeń układu, co często
jest poważnym problemem. Zwłaszcza
w 89C2051, 90S2313 lub miniaturowych
AVR-ach (np. 90S2343, 90S1200). Niekiedy
brakuje nam wyprowadzeń. Prezentowany
układ rozwiązuje powyższe problemy, gdy
potrzebna jest klawiatura o ośmiu lub mniej
przyciskach. Do jego połączenia z proceso-
rem wystarczy jedno wyprowadzenie. Układ
na swoim wyjściu wytwarza przebieg prosto-
kątny niosący informację o numerze wciśnię-
tego przycisku. Jest on łatwy do zdekodowa-
nia za pomocą dowolnego procesora. Ogrom-
ną zaletą układu jest jego bardzo niska cena
oraz to, że w spoczynku w ogóle nie pobiera
prądu, z wyjątkiem liczonych w nanoampe-
rach prądów polaryzacji wejść CMOS i róż-
nych prądów upływu. Pomiar tego prądu za
pomocą mikroamperomierza cyfrowego
o rozdzielczości 1
µA nie spowodował jakiej-
kolwiek reakcji miernika, nawet na tej naj-
mniej znaczącej pozycji – a więc prąd pobie-
rany w spoczynku jest dużo mniejszy od
1µA! Pobór w trakcie pracy wynosi ok.
650µA i może być zmniejszony, jeśli zajdzie
taka potrzeba poprzez zwiększenie wartości
rezystorów R2,R3 i R6, które są w modelu
stosunkowo małe. Cechy te pozwalają na za-
silanie bateryjne. I tu ujawnia się kolejne za-
stosowanie opisywanego modułu – dodając
jakikolwiek generator częstotliwości nośnej
(choćby na 4047 lub 555 CMOS), możemy
zbudować taniutki i prosty pilot zdalnego
sterowania, przeznaczony do współpracy
z mikrokontrolerem. Kolejną zaletą jest wyj-
ście typu otwarty kolektor.
Jak to działa?
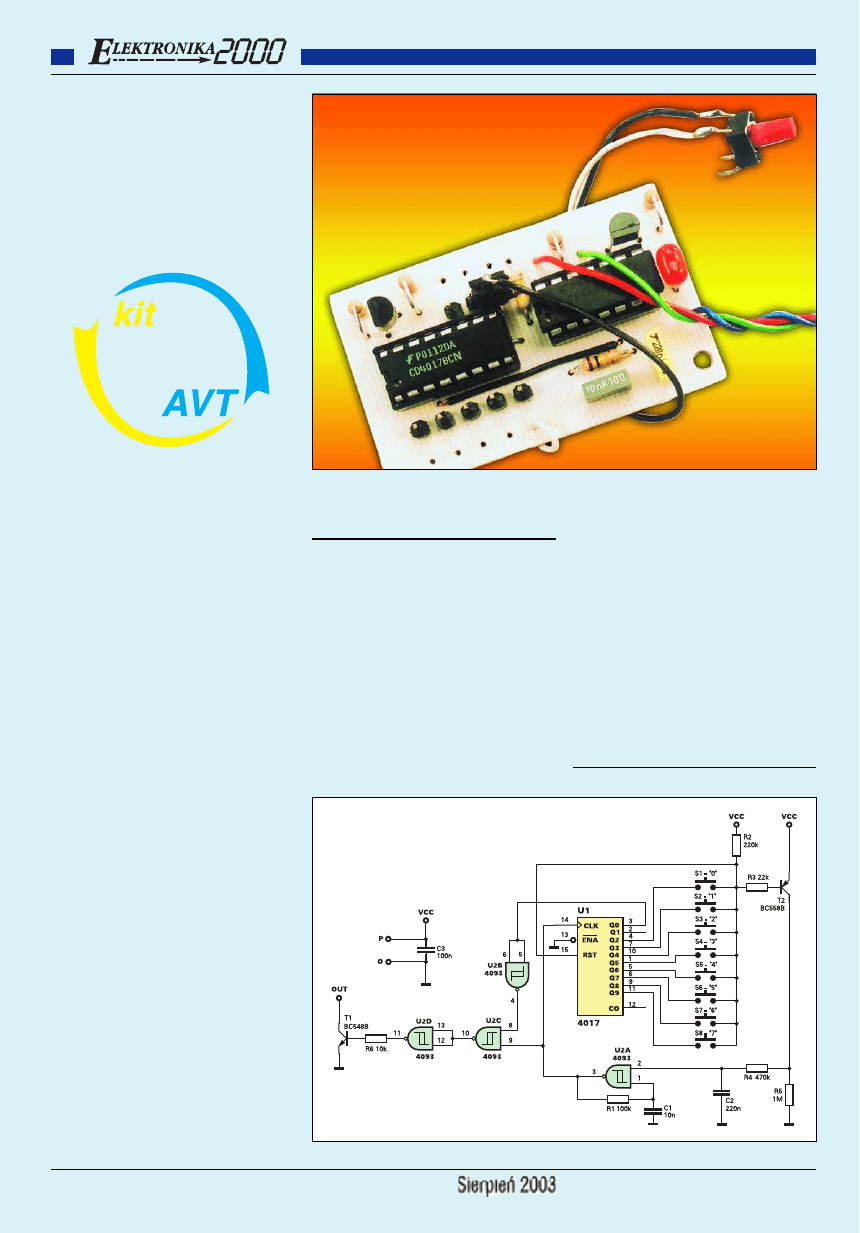
Schemat ideowy przedstawiony jest na ry-
sunku 1. Jak widać, całość zrealizowałem
z użyciem dwóch prostych układów CMOS
i garstki elementów. W stanie spoczynku
wszystkie przyciski są rozwarte, U1 jest wy-
zerowany i na jego wyjściu Q0 występuje
stan wysoki. Tranzystor T2 jest zatkany a ge-
nerator z bramką U2A nie pracuje. Na nóżce
11 U2 jest stan niski i T1 jest zatkany. Wci-
śnięcie któregokolwiek z przycisków spowo-
duje podanie stanu niskiego na wejście RST
układu U1 oraz otwarcie T2. Drgania wystę-
pujące na początku nie będą przeszkadzać,
gdyż obwód opóźniający R4C2 nie pozwoli
na uruchomienie generatora z bramką
U2A, zanim drgania te nie ustąpią. Gdy już
tak się stanie, generator ten zaczyna praco-
wać, wytwarzając przebieg prostokątny o czę-
stotliwości ok. 1kHz. Wraz z wystąpieniem
pierwszego zbocza narastającego stan wysoki
zniknie z wyjścia Q0 U1, bramka U2B otwo-
rzy bramkę U2C i na wyjściu układu (kolek-
tor T1) pojawi się zanegowany przebieg
z nóżki 3 U2 – za stan wysoki uznaję tu stan
zatkania T1, wszak jego kolektor będzie za-
wsze podciągnięty do plusa zasilania stero-
wanego układu mikroprocesorowego.
Przyjmijmy na początek następującą umo-
wę: słowem impuls będę określał połowę
okresu generatora, czyli występowanie tam
2
2
6
6
7
7
3
3
+
+
+
K
K
l
l
a
a
w
w
i
i
a
a
t
t
u
u
r
r
a
a
d
d
o
o
m
m
i
i
k
k
r
r
o
o
k
k
o
o
n
n
t
t
r
r
o
o
l
l
e
e
r
r
a
a
,
,
c
c
z
z
y
y
l
l
i
i
o
o
s
s
i
i
e
e
m
m
p
p
r
r
z
z
y
y
c
c
i
i
s
s
k
k
ó
ó
w
w
w
w
j
j
e
e
d
d
n
n
y
y
m
m
Rys. 1 Schemat ideowy
stanu wysokiego lub niskiego. Nie chodzi
jednak o połowę czasu, gdyż przebieg wytwa-
rzany przez prościutki generator na U2A wca-
le nie ma wypełnienia 50%, ale to nic nie
przeszkadza. Tak więc 1 okres ma 2 impulsy,
1,5 okresu to 3 impulsy itd.. Załóżmy przy-
kładowo, że wciśnięto przycisk S3 oznaczony
numerem 2. Pierwsze narastające zbocze
przebiegu generatora U2A spowoduje poja-
wienie się stanu wysokiego na Q1 U2 oraz
natychmiastowe wystąpienie na wyjściu sta-
nu niskiego. Po wygenerowaniu 2 impulsów
stan wysoki przejdzie na wyjście Q2, po 4 im-
pulsach pojawi się na Q3. Po wytworzeniu
piątego impulsu układ zacznie generować
szósty, ale po jego zakończeniu stan wysoki
pojawi się na wyjściu Q4, do którego dołą-
czony jest zwarty przycisk S3. Spowoduje to
natychmiastowe wyzerowanie U1 i zamknię-
cie bramki U2C. Na wyjściu układu pojawi
się stan wysoki (zatkany T1) na czas trwania
1 okresu, czyli kolejnych 2 impulsów. Ponie-
waż podczas generowania impulsu numer 6
(jak i każdego parzystego) na wyjściu rów-
nież był stan wysoki, to w rezultacie po wy-
stąpieniu 5 impulsów pojawi się tam długi
stan wysoki o czasie trwania 3 kolejnych im-
pulsów (szósty impuls zleje się z dwoma na-
stępnymi). Dalsze trzymanie S3 znów spowo-
duje wystąpienie 5 krótkich impulsów i jed-
nego długiego itd. Puszczenie przycisku na-
tychmiast resetuje U1 i po chwili wyłącza ge-
nerator. Jeśli ktoś, zamiast S3, wciśnie np. S4
(numer 3), to układ wytworzy przebieg,
w którym pomiędzy dwoma impulsami długi-
mi będzie 7 krótkich (o 1 okres więcej – to
oczywiste), z których każdy trwa ok. 3 razy
krócej niż długi. Dla przycisku numer 1 będą
to 3 krótkie impulsy, a dla numer 0 – tylko 1.
Mam nadzieję, że dostrzegacie już ogólną za-
leżność: po wciśnięciu przycisku numer
N (0...7) układ generuje przebieg,
w którym pomiędzy dwoma długimi im-
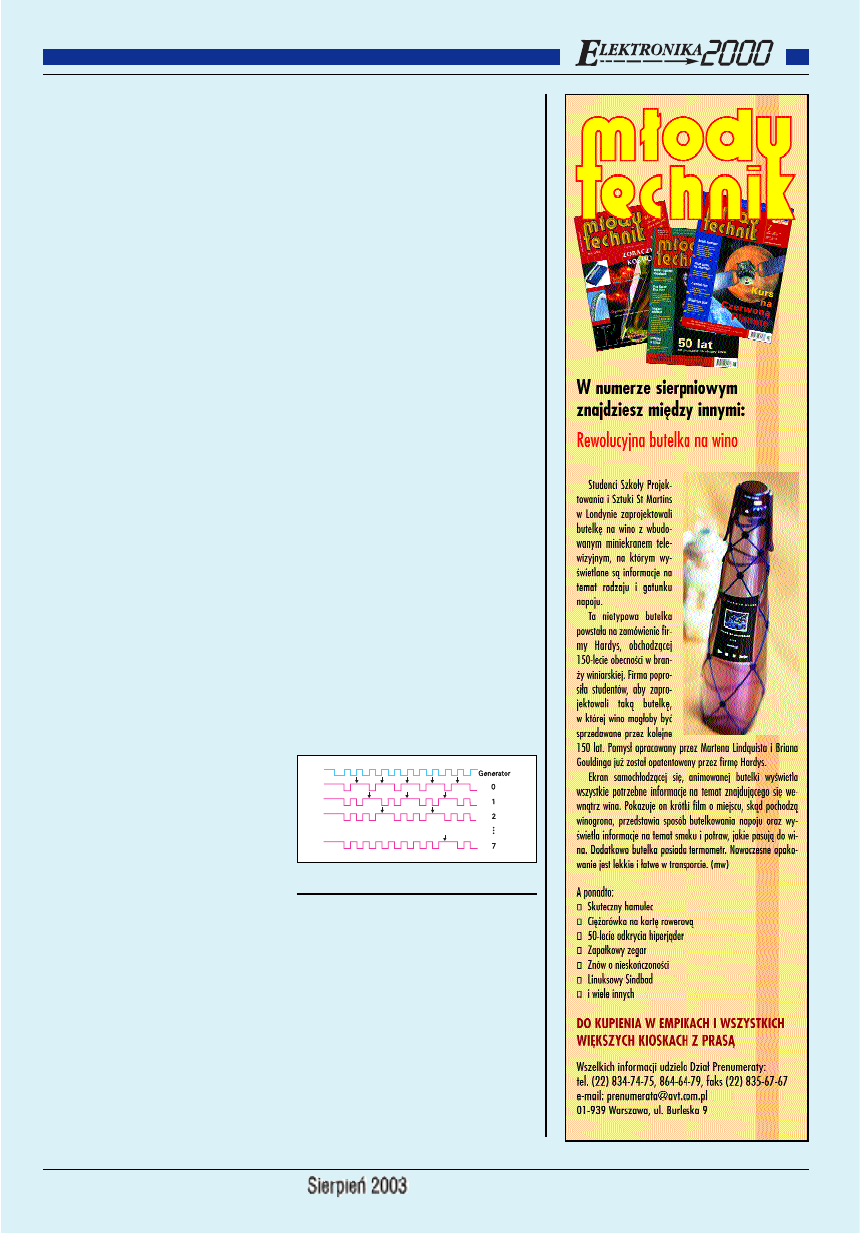
pulsami jest 2N+1 krótkich. Pomocą będzie
rysunek 2, na którym przedstawiłem przebie-
gi na wyjściu układu po wciśnięciu kilku wy-
branych przycisków na tle przebiegu z nóżki
3 U2. Strzałki pokazują momenty, w których
resetowany jest U1. Przebiegi takie są łatwe
do zdekodowania przez mikroprocesor – aby
otrzymać numer przycisku, wystarczy poli-
czyć, ile krótkich impulsów występuje po-
między dwoma długimi, odjąć 1 i podzielić
przez 2. Ze względu na to, że w układzie wy-
stępuje prościutki generator z jedną bramką,
dobrze jest do dekodowania brać nie pierw-
szą, ale drugą lub trzecią serię impulsów –
w pierwszej mogą występować impulsy
o mniej jednolitych czasach niż w kolejnych
seriach. Warto też sprawdzić, czy po długim
impulsie kończącym analizowaną serię wy-
stępuje kolejny krótki impuls, rozpoczynają-
cy serię następną. Zapobiegnie to błędom wy-
stępującym podczas ekstremalnie krótkich
naciśnięć przycisków, kiedy to mogłoby dojść
do sytuacji, w której analizowana seria prze-
rwana byłaby w połowie przez puszczenie
przycisku – dotyczy to zwłaszcza szybkich
styków popularnych microswitchów.
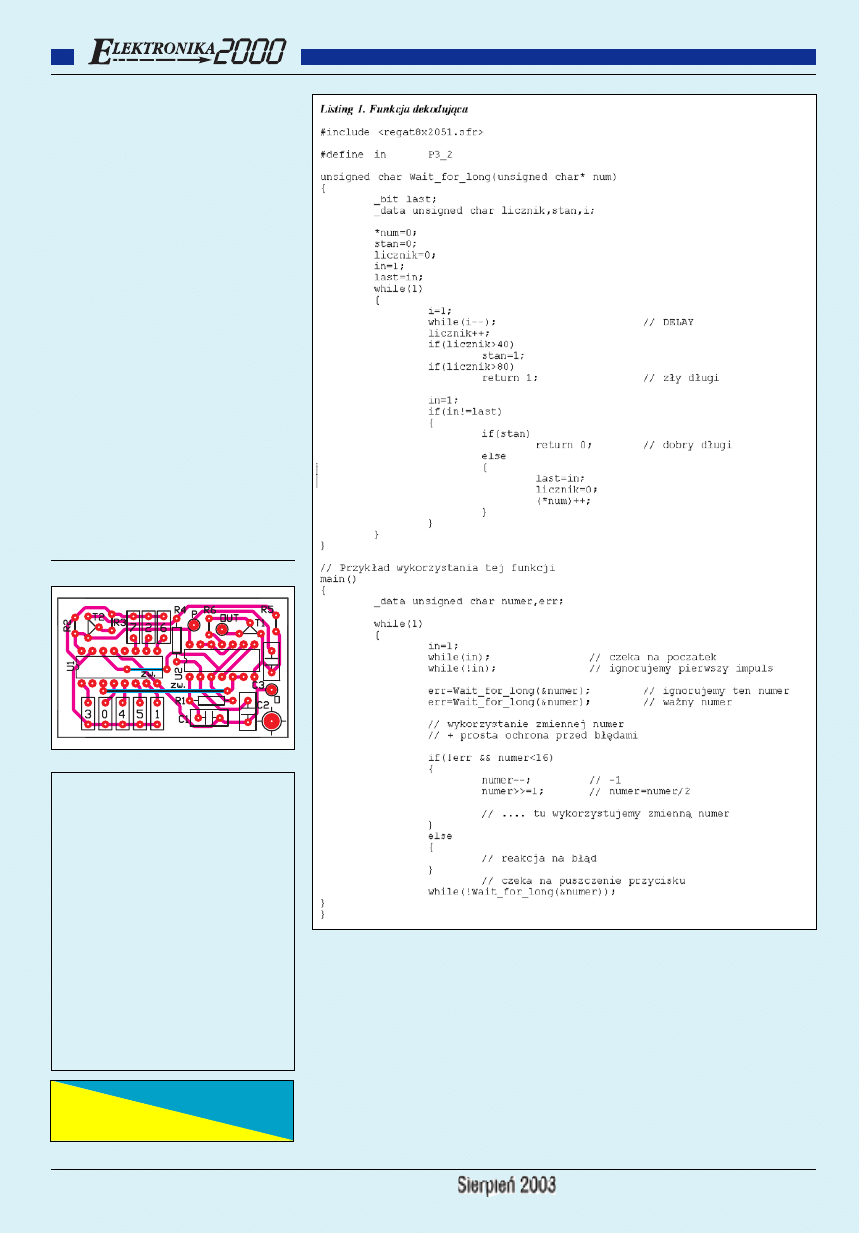
Przykładową, wypróbowaną w praktyce na
2051, procedurę realizującą powyższe założe-
nia w języku C przedstawia Listing 1. Funk-
cja Wait_for_long, jak sama nazwa wskazuje,
czeka na długi impuls. Zwraca 0, gdy był to
„dobry” impuls, czyli taki, po którym wciąż
nadchodzą krótkie impulsy; zwraca 1, jeśli im-
puls ten trwa zbyt długo – jest wynikiem pu-
szczenia przycisku. Za argument przyjmuje
wskaźnik do zmiennej w której umieszcza
wynik, czyli liczbę krótkich impulsów jakie
wystąpiły od momentu wywołania tej funkcji
do najbliższego długiego impulsu. W funkcji
main jest przykład wykorzystania: pierwsze
wywołanie Wait_for_long służy zignorowaniu
pierwszej serii, po drugiej w zmiennej numer
jest numer wciśniętego przycisku (0...7). Po
wykorzystaniu tej wartości do określonego ce-
lu program czeka aż zwróci ona 1 – tym sa-
mym czeka na puszczenie przycisku. Zauważ-
cie, jak uniwersalna jest ta funkcja i ile infor-
macji można z niej uzyskać. Oczywiście to
tylko przykład i kto chce może napisać swoją
własną na dowolny procesor. Moja napisana
jest dla procesora ’51 z kwarcem 11,059MHz.
Przerobienie jej na inny typ (np. AVR) spro-
wadza się do zmiany realizacji opóźnienia
(Delay) zależnie od konkretnego typu i zega-
ra. Opóźnienie to powinno być kilkana-
ście...kilkadziesiąt razy krótsze od czasu trwa-
nia krótkiego impulsu, który dla wartości ele-
mentów jak na schemacie jest rzędu
500µs (podkreślam – rzędu). Oprócz tego na-
leży wtedy dobrać liczby określające długość
określające minimalną długość impulsu dłu-
giego i za długiego (u mnie są to 40 i 80).
Montaż i uruchomienie
Schemat montażowy przedstawiony został
na rysunku 3. Montaż jest typowy i nie wy-
maga komentarza. Zaczynamy od zworek
a kończymy na tranzystorach i układach
scalonych (warto zastosować podstawki).
Miejsca do podłączenia przycisków oznaczo-
no ich numerami, pod jakimi będą dekodowa-
ne w programie. Po zmontowaniu ze spraw-
nych elementów układ od razu działa popraw-
nie. Do jego sprawdzenia przyda się jakikol-
wiek analizator stanów logicznych. W moim
przypadku był to najzwyklejszy tranzystor
NPN podłączony do portu drukarkowego
51
Elektronika dla Wszystkich
Rys. 2 Przebiegi wyjściowe
REKLAMA · REKLAMA · REKLAMA · REKLAMA
i darmowy programik ściągnięty z sieci.
Przebiegi na wyjściu powinny być takie jak
na rysunku 2. Oprócz programu z listingu 1
na stronie EdW (w dziale FTP) znajdziecie
prosty program (źródło i *.bin), który wy-
świetla numer wciśniętego przycisku na wy-
świetlaczu LCD (interfejs HD44780). Może
on służyć do przetestowania układu. Jednak ze
względu na duży rozrzut progów przełączania
bramek w różnych egzemplarzach kostek 4093
może się zdarzyć, że choć układ będzie wytwa-
rzał przebiegi o prawidłowym kształcie oraz
wartości elementów będą takie jak na rysunku
1, to czasy impulsów będą się bardzo różniły od
tych w modelu. Na wyświetlaczu będzie się
wtedy notorycznie pojawiał napis Error!!!! lub
jakieś „głupoty”. Sporadyczne pojawianie się
tego napisu nie świadczy o błędzie w układzie,
lecz o wystąpieniu przekłamań, które w rzeczy-
wistym świecie się zdarzają. Chodzi o to, aby
właściwie na nie zareagować i nie uznać błęd-
nej transmisji za właściwą. Najprościej jest ją
po prostu zignorować. Jeżeli jednak napis ten
pojawia się często, to należy zmierzyć czasy
analizatorem i zmienić liczby 40 i 80 w funkcji
Wait_for_long na odpowiednie. Jeśli zaś chodzi
o samą stabilność tego generatora, to choć
jest ona słaba, tutaj w zupełności wystarczy.
Częstotliwość musiałaby się rozjechać dwu-
krotnie, żeby wystąpiły błędy, a do tego w ty-
powych warunkach pracy nie dojdzie. Jest ona
natomiast mocno zależna od napięcia zasila-
nia – wspomniane liczby trzeba dobrać przy
takim napięciu, przy jakim układ ma praco-
wać docelowo. Ostatecznie można napisać
ulepszoną, bardziej uniwersalną funkcję, która
nie będzie miała tych liczb wpisanych „na
sztywno”. Będzie mierzyć krótkie impulsy
i czekać na wystąpienie długiego impulsu
o nie ściśle określonym czasie, ale rzeczywi-
ście ponad 2-krotnie dłuższego od krótkich.
Uniezależni to nas od rozrzutów i innych nie-
stabilności – wszystko w rękach programi-
stów. Wszystkie stałe czasowe można dobrać
wedle uznania. Gotowy moduł wstawiamy do
urządzenia z mikrokontrolerem, gdzie brakuje
nam wyprowadzeń i problem mamy z głowy.
Interesująco wygląda możliwość dołączenia
do naszej klawiaturki generatora (np. 36kHz)
i budowa prostego pilota IRED.
Arkadiusz Antoniak
hal9900@poczta.onet.pl
52
Elektronika dla Wszystkich
Wykaz elementów
RReezzyyssttoorryy
R1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100kΩ
R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220kΩ
R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22kΩ
R4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .470kΩ
R5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1MΩ
R6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10kΩ
KKoonnddeennssaattoorryy::
C1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10nF MKT
C2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220nF MKT
C3 . . . . . . . . . . . . . . . . . . . . . . . . . . . .100nF ceramiczny
PPóółłpprrzzeewwooddnniikkii::
U1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4017
U2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4093
T1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC548B
T2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC558B
Inne:
S1-S8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Przyciski zwierne, typ zależny od konkretnego zastosowania
(nie wchodzą w skład kitu AVT).
KKoom
mpplleett ppooddzzeessppoołłóóww zz ppłłyyttkkąą
jjeesstt ddoossttęęppnnyy ww ssiieeccii hhaannddlloowweejj AAVVTT
jjaakkoo kkiitt sszzkkoollnnyy AAVVTT-22667733
Rys. 3 Schemat montażowy
Listing 1. Funkcja dekodująca
#include <regat8x2051.sfr>
#define in
P3_2
unsigned char Wait_for_long(unsigned char* num)
{
_bit last;
_data unsigned char licznik,stan,i;
*num=0;
stan=0;
licznik=0;
in=1;
last=in;
while(1)
{
i=1;
while(i--);
// DELAY
licznik++;
if(licznik>40)
stan=1;
if(licznik>80)
return 1;
// zły długi
in=1;
if(in!=last)
{
if(stan)
return 0;
// dobry długi
else
{
last=in;
licznik=0;
(*num)++;
}
}
}
}
// Przykład wykorzystania tej funkcji
main()
{
_data unsigned char numer,err;
while(1)
{
in=1;
while(in);
// czeka na poczatek
while(!in);
// ignorujemy pierwszy impuls
err=Wait_for_long(&numer);
// ignorujemy ten numer
err=Wait_for_long(&numer);
// ważny numer
// wykorzystanie zmiennej numer
// + prosta ochrona przed błędami
if(!err && numer<16)
{
numer--;
// -1
numer>>=1;
// numer=numer/2
// .... tu wykorzystujemy zmienną numer
}
else
{
// reakcja na błąd
}
// czeka na puszczenie przycisku
while(!Wait_for_long(&numer));
}
}
Wyszukiwarka
Podobne podstrony:
edw 2003 08 s10
edw 2003 09 s50
edw 2003 08 s12
edw 2003 08 s62 czI zapłon elektroniczny
edw 2003 08 s67
edw 2003 08 s30
edw 2003 08 s20
AVT 2675 Iluminofoniczne Magi EdW 2003 08 id 74053
edw 2003 08 s10
edw 2003 08 s45
edw 2003 08 s24
edw 2003 11 s50
edw 2003 10 s50
edw 2003 07 s50
więcej podobnych podstron