- Czytaniem podstawowych
schematÛw drabinkowych
oraz pos³ugiwaniem siÍ list¹
instrukcji PLC.
- Identyfikacj¹ rÛønic pomiÍ-
dzy sterownikami SIMATIC
S7-212 a†S7-214.
- Dobraniem w³aúciwych mo-
du³Ûw rozszerzaj¹cych porty
wejúciowe i†wyjúciowe.
Tak wiÍc - zapraszamy.
BÍdzie to automatyka w†pigu³-
ce!
Co to jest PLC?
Programowalne sterowniki
logiczne (PLC, ang. Program-
mable Logic Controllers), na-
zywane takøe sterownikami
programowalnymi, naleø¹ do
szeroko rozumianej rodziny
komputerÛw. Wykorzystywane
s¹ g³Ûwnie w†zastosowaniach
przemys³owych. Praca PLC po-
lega na monitorowaniu wejúÊ
analogowych i†cyfrowych, po-
dejmowaniu decyzji w†oparciu
o†program (algorytm dzia³ania)
uøytkownika oraz odpowied-
nim sterowaniu wyjúciami
(rys. 1).
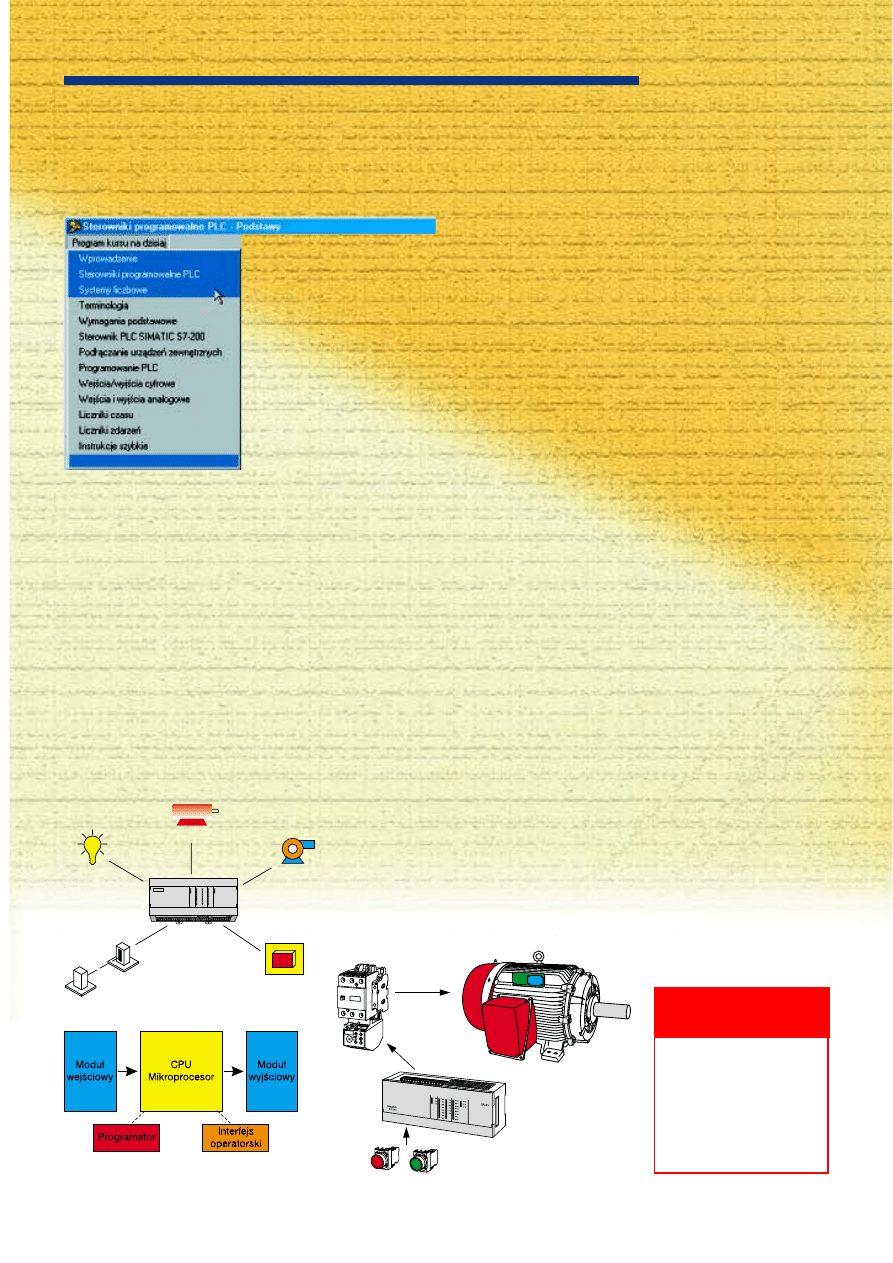
Zasada dzia³ania PLC
Sterowniki PLC zbudowa-
ne s¹ z†modu³Ûw wejúciowych,
jednostki centralnej (CPU) oraz
modu³Ûw wyjúciowych (rys. 2).
Wejúcia PLC akceptuj¹ rÛø-
ne sygna³y wejúciowe, cyfrowe
lub analogowe, pochodz¹ce
z † z e w n Í t r z n y c h
urz¹dzeÒ (czujni-
kÛw), przetwarzane
nastÍpnie do posta-
ci sygna³Ûw logicz-
nych, ktÛre staj¹ siÍ
z r o z u m i a ³ e d l a
CPU.
Jednostka CPU
podejmuje decyzje
i†wykonuje funkcje
sterowania bazuj¹c
na instrukcjach programowych
zawartych w†pamiÍci. Modu³y
wyjúciowe przetwarzaj¹ funk-
cje sterowania z†CPU do takiej
postaci sygna³Ûw (cyfrowych
lub analogowych), jakich wy-
maga aplikacja.
I n s t r u k c j e p r o g r a m o w e
okreúlaj¹ co powinien wyko-
naÊ PLC przy okreúlonym sta-
nie wejúÊ i†w†danej sytuacji.
Dodatkowy interfejs operator-
ski (pulpit sterowniczy) umoø-
liwia wyúwietlanie informacji
o†realizowanym procesie ste-
rowania i†wprowadzanie no-
wych parametrÛw kontrol-
nych.
W†prezentowanym na rys.
3 przyk³adzie, przyciski (czuj-
niki) pod³¹czone do wejúÊ PLC
mog¹ byÊ uøyte do uruchomie-
nia lub zatrzymania silnika do-
³¹czonego do PLC poprzez
stycznik silnika, ktÛry spe³nia
rolÍ urz¹dzenia wykonawcze-
go.
Sterowanie
konwencjonalne
Przed pojawieniem siÍ PLC
wiele z†zadaÒ kontrolnych by-
³o rozwi¹zywanych przez ³¹-
czone ze sob¹ styczniki lub
przekaüniki. Taki sposÛb ste-
rowania nazywany jest czÍsto
sterowaniem konwencjonal-
nym.
Zasada pracy konwencjo-
nalnego uk³adu sterowania jest
okreúlona przez trwa³e po³¹-
czenie aparatury stycznikowo-
przekaünikowej i†elementÛw
obiektowych. Okablowanie
uk³adu jednoznacznie i†trwale
okreúla sposÛb jego funkcjono-
wania. Jakiekolwiek zmiany
lub rozbudowa uk³adu stero-
wania wymagaj¹ uzupe³nienia
aparatury kontrolnej i†ponow-
nego okablowywania.
Przyk³adowy uk³ad stero-
w a n i a k o n w e n c j o n a l n e g o
przedstawiono na rys. 4.
Sterowniki programowalne PLC
Podstawy, część 1
Korzystaj¹c z†uprzejmoúci firmy Siemens
publikujemy krÛtki kurs, prezentuj¹cy
podstawowe zagadnienia zwi¹zane
z†nowoczesnymi sterownikami PLC.
Zaczynamy od podstaw, ktore choÊ dla
wiÍkszoúci CzytelnikÛw s¹ oczywiste,
czasami mog¹ sprawiÊ nieco k³opotÛw.
Publikacja oparta jest na podrÍczniku
ìPodstawy sterownikÛw programowalnych
PLCî, przygotowanym przez specjalistÛw
firmy Siemens.
PodrÍcznik ten stanowi przystÍpny
wyk³ad o†sterownikach programowalnych
PLC. Przeznaczony jest dla wszystkich
poszukuj¹cych informacji z†zakresu podstaw
automatyki.
Silniki napêdów
Pompy
Lampki
Czujniki œwietlne
Przyciski
Prze³¹czniki
START
Q 0,0
Q 0,1
Q 0,2
Q 0,3
Q 0,4
Q 0,5
Q 0,6
Q 0,7
Q 1,0
Q 1,1
Q 1,2
I 1,0
I 1,1
I 1,2
I 1,3
I 1,4
I 1,5
SF
RUN
STOP
I 0,0
I 0,1
I 0,2
I 0,3
I 0,4
I 0,5
I 0,6
I 0,7
CPU214
SIMATIC
S7-200
Rys. 2.
Zalety PLC w stosunku do kon−
wencjonalnych rozwiązań ukła−
dów sterujących:
✓
Mniejszy rozmiar układu sterowania
niż w przypadku rozwiązań konwen−
cjonalnych.
✓
Łatwiejsze i szybsze dokonywanie
zmian w algorytmie działania.
✓
Centralnie dostępne funkcje nastaw−
cze, diagnostyczne i zabezpieczające.
✓
Aplikacje mogą być natychmiast, au−
tomatycznie dokumentowane.
✓
Aplikacje mogą być szybciej i znacz−
nie taniej powielane.
Stycznik silnika
(elem. wykonawczy)
Wyjœcie
PLC
Silnik
Przyciski Start/Stop
(czujniki)
Wejœcie
Rys. 1.
Rys. 3.
A U T O M A T Y K A
Wprowadzenie
Kurs STEP 2000 - Siemens
Technical Education Program
(program edukacji technicznej
firmy Siemens) obejmuje za-
kres podstawowych informacji
na temat sterownikÛw PLC
oraz zwi¹zanych z†nimi pro-
duktÛw automatyki z innych
rodzin. Po ukoÒczeniu kursu
podstaw PLC bez trudu pora-
dzimy sobie z:
- Identyfikacj¹ g³Ûwnych ele-
mentÛw PLC i†rozumieniem
realizowanych przez nie
funkcji.
- Przekszta³caniem liczb z†po-
staci dziesiÍtnej na binarn¹,
BCD oraz szesnastkow¹.
- I d e n t y f i k a c j ¹ t y p o w y c h
wejúÊ i†wyjúÊ cyfrowych
i†analogowych.
33
Elektronika Praktyczna 1/2000
A U T O M A T Y K A
Sterowanie z PLC
Takie same, a†takøe bar-
dziej skomplikowane zadania
mog¹ byÊ wykonane za pomo-
c¹ PLC.
ìOkablowanie po³¹czeÒ lo-
gicznychî pomiÍdzy urz¹dze-
niami i†stykami przekaünikÛw
wykonywane jest w†programie
zapisanym w†pamiÍci PLC. Na
zewn¹trz wymagane jest jedy-
nie proste pod³¹czenie apara-
tury obiektowej do wejúÊ
i†wyjúÊ sterownika. Opracowa-
nie aplikacji i†usuwanie b³Í-
dÛw jest znacznie ³atwiejsze
niø w†sterowaniu konwencjo-
nalnym. Znacznie ³atwiej two-
rzy siÍ i†modyfikuje program
w†PLC niø zmienia okablowa-
nie uk³adu.
Sterowniki PLC firmy
Siemens
Firma Siemens produkuje
kilka odmian sterownikÛw
PLC rodziny SIMATIC S7. S¹
to: S7-200, S7-300 oraz S7-400.
Sterownik S7-200
Sterownik ten jest okreúla-
ny mianem mikro-PLC, a†to ze
wzglÍdu na swoje niewielkie
wymiary. Jednostka centralna
sterownika S7-200 zbudowana
jest w†postaci bloku, ze zinteg-
rowanym zasilaczem i†wejúcia-
mi/wyjúciami obiektowymi
(rys. 5). S7-200 moøe byÊ uøy-
wany w†mniejszych, samodziel-
nych aplikacjach, takich jak np.
podnoúniki, myjnie samocho-
dowe lub mieszarki. Moøe byÊ
takøe stosowany w†bardziej
kompleksowych aplikacjach
przemys³owych, takich jak li-
nie butelkowania i†pakowania.
Sterownik S7-200 dostÍp-
ny jest w†piÍciu wersjach: S7-
210, S7-212, S7-214, S7-215
i†S7-216. Jednostki S7-212, S7-
214 zostan¹ omÛwione w†ko-
lejnych odcinkach tego kursu.
Sterowniki S7-300 i†S7-400
Sterowniki PLC typu S7-
300 i†S7-400 s¹ uøywane
w†bardziej skomplikowanych
zastosowaniach, poniewaø ob-
s³uguj¹ znacznie wiÍksz¹ licz-
bÍ wejúÊ i†wyjúÊ obiektowych.
Oba sterowniki wykonano
w†technice modu³owej, dziÍki
czemu moøna je w†prosty spo-
sÛb rozbudowywaÊ. Zasilacz
oraz modu³y wejúÊ/wyjúÊ sta-
nowi¹ oddzielne bloki pod³¹-
czane do CPU. WybÛr pomiÍ-
dzy S7-300 lub S7-400 zaleøy
od stopnia z³oøonoúci procesu
sterowania i†moøliwoúci przy-
sz³ej rozbudowy.
Systemy liczbowe
Sterowniki programowalne
s¹ komputerami, ktÛre prze-
chowuj¹ informacje w†postaci
dwÛch stanÛw logicznych: 1
lub 0, nazywanych cyframi bi-
narnymi (bitami). Cyfry binar-
ne s¹ uøywane indywidualnie
lub wykorzystywane do przed-
stawiania wartoúci numerycz-
nych (liczbowych).
System dziesiÍtny
Sterowniki wykorzystuj¹
wiele systemÛw liczbowych.
Wszystkie systemy liczbowe
maj¹ te same trzy cechy: cyfry,
podstawÍ i†wagÍ.
System dziesiÍtny, ktÛry
jest powszechnie uøywany
w†øyciu codziennym, posiada
nastÍpuj¹ce cechy charakterys-
tyczne:
DziesiÍÊ cyfr: 0, 1, ,2, 3, 4, 5,
6, 7, 8, 9
PodstawÍ: 10
Wagi: 1, 10, 100, 1000...
System binarny
System binarny wykorzys-
tywany jest przez sterowniki
programowalne. System binar-
ny posiada nastÍpuj¹ce cechy
charakterystyczne:
Dwie cyfry: 0, 1
PodstawÍ: 2
Wagi: 1, 2, 4, 8, 16...
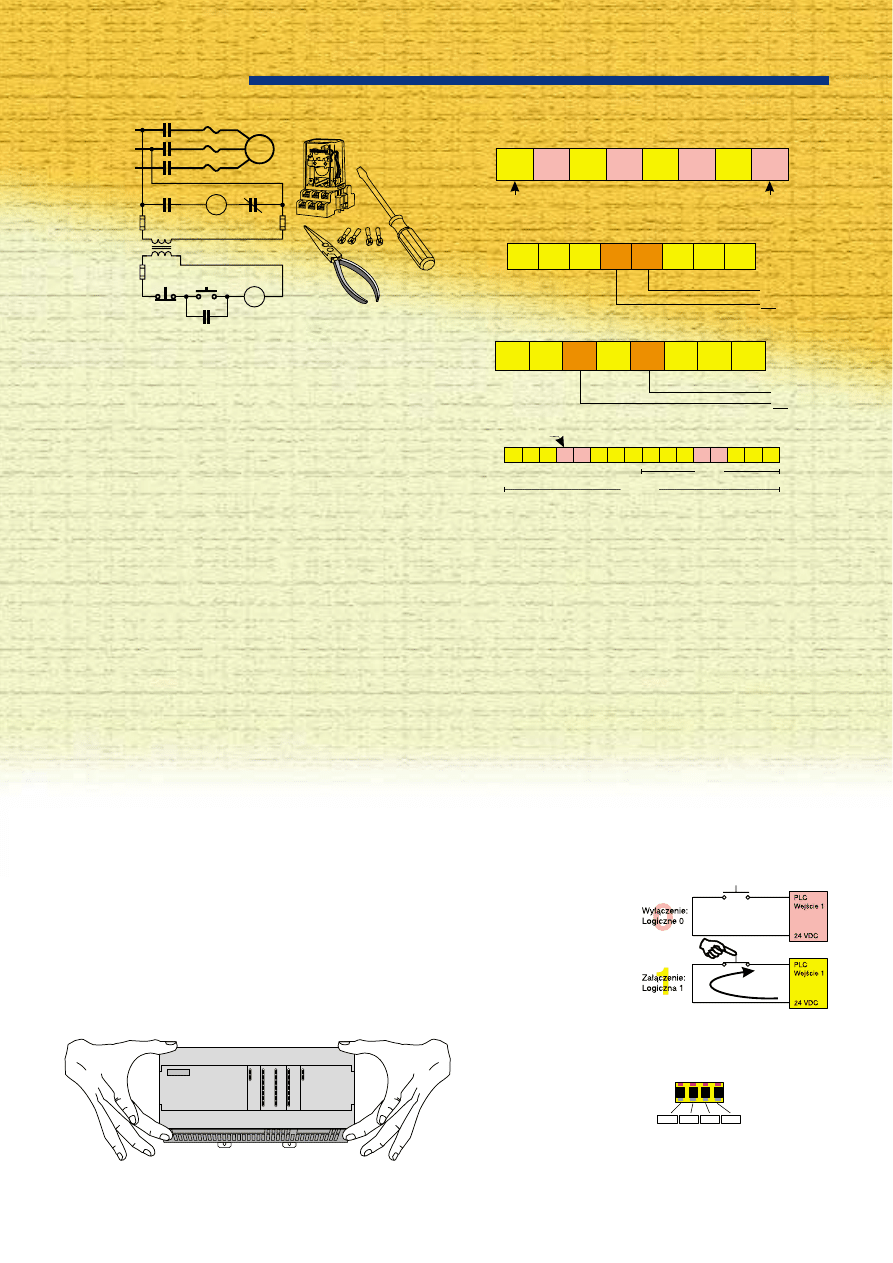
W†systemie binarnym je-
dynki i†zera zajmuj¹ w zapisie
okreúlone pozycje. Kaødej po-
zycji odpowiada jej waga (rys.
6). Pierwsza pozycja z prawej
posiada wagÍ 2
0
. Jest ona od-
powiednikiem dziesiÍtnych
jednoúci. Bit z tej pozycji jest
nazywany najmniej znacz¹cym
bitem. Waga binarna jest po-
dwajana z†kaød¹ kolejn¹ pozy-
cj¹. NastÍpna pozycja (druga
z†prawej) posiada wagÍ 2
1
, ktÛ-
ra odpowiada dziesiÍtnej dwÛj-
ce.
WartoúÊ dziesiÍtna jest po-
dwajana na kaødej kolejnej po-
zycji. Liczba na pozycji najda-
lej po lewej stronie jest nazy-
wana najbardziej znacz¹cym bi-
tem. W†naszym przyk³adzie,
najbardziej znacz¹cy bit posia-
da wagÍ binarn¹ 2
7
. Odpowia-
da to liczbie dziesiÍtnej 128.
Zamiana zapisu liczby
z†systemu binarnego
na dziesiÍtny
Poniøsze kroki mog¹ byÊ
wykorzystane do znalezienia
dziesiÍtnego odpowiednika
liczby zapisanej w†kodzie bi-
narnym (rys. 7).
1.Rozpocznij od prawej strony
do lewej (od najmniej zna-
cz¹cego do najbardziej zna-
cz¹cego bitu).
2.Zapisz pod spodem repre-
zentacjÍ dziesiÍtn¹ wszyst-
kich pozycji zwieraj¹cych je-
dynki.
3.Dodaj wartoúci w†kolumnie.
W†prezentowanym przy-
k³adzie na czwartej i†pi¹tej po-
zycji od prawej s¹ jedynki.
WartoúÊ dziesiÍtna czwartej
pozycji od prawej wynosi 8,
a†wartoúÊ dziesiÍtna pozycji
pi¹tej od prawej to 16.
DziesiÍtny odpowiednik ta-
kiej liczby binarnej wynosi 24.
Suma wag wszystkich pozycji,
ktÛre zwieraj¹ jedynki, jest
liczb¹ dziesiÍtn¹ zapamiÍtywa-
n¹ przez PLC.
W†kolejnym przyk³adzie
(rys. 8) na czwartej i†szÛstej
pozycji od prawej s¹ jedynki.
WartoúÊ dziesiÍtna czwartej
pozycji od prawej wynosi 8
a†wartoúÊ dziesiÍtna pozycji
szÛstej od prawej to 32. Dzie-
siÍtny odpowiednik takiej licz-
by binarnej wynosi 40.
T1
T3
T2
M
M
OL
Silnik
M
OL
OL
OL
CR
CR
Stop
Start
M
CR
L1
L2
L3
460 AVC
1
2
Rys. 4.
Q 0,0
Q 0,1
Q 0,2
Q 0,3
Q 0,4
Q 0,5
Q 0,6
Q 0,7
Q 1,0
Q 1,1
Q 1,2
I 1,0
I 1,1
I 1,2
I 1,3
I 1,4
I 1,5
SF
RUN
STOP
I 0,0
I 0,1
I 0,2
I 0,3
I 0,4
I 0,5
I 0,6
I 0,7
CPU214
SIMATIC
S7-200
Rys. 5.
0
0
0
1
1
0
0
0
1
2
4
8
16
32
64
128
2
7
2
6
2
5
2
4
2
3
2
2
2
1
2
0
Najmniej znacz¹cy bit
Najbardziej znacz¹cy bit
0
0
0
1
1
0
0
0
1
2
4
8
16
32
64
128
8
+16
24
0
0
1
0
1
0
0
0
1
2
4
8
16
32
64
128
8
+32
40
0
0
0
0
0
0
1
1
1
1
0
0
0
0
0
0
S³owo
Bajt
Bit
Rys. 6.
Rys. 7.
Rys. 8.
Rys. 9.
Rys. 10.
0
0
2
5
0000 0010 0000 0101
Liczby
dziesiêtne
0
1
2
3
4
5
6
7
8
9
Liczby
BCD
0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
Rys. 11.
34
Elektronika Praktyczna 1/2000
A U T O M A T Y K A
wagÍ odpowiedni¹ dla danej
cyfry, a†nastÍpnie zsumowanie
tych iloczynÛw cz¹stkowych.
W†poniøszym przyk³adzie
(rys. 12) szesnastkowa liczba
2B przekszta³cana jest do swo-
jego odpowiednika dziesiÍtne-
go tj. liczby 43.
16
0
= 1
16
1
= 16
B
= 11
AC
2
B
16
1
16
0
11 x 1 = 11
2 x 16 = 32
43
Rys. 12.
Artyku³ opracowany na
podstawie podrÍcznika ìPod-
stawy sterownikÛw programo-
walnych PLCî firmy Siemens.
Ci¹g dalszy artyku³u zosta-
nie opublikowany w EP2/2000.
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
10
11
12
13
14
.
.
7E
7F
80
.
.
1FE
1FF
200
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
.
.
126
127
128
.
.
510
511
512
0
1
10
11
100
101
110
111
1000
1001
1010
1011
1100
1101
1110
1111
1 0000
1 0001
1 0010
1 0011
1 0100
.
.
111 1110
111 1111
1000 0000
.
.
1 1111 1110
1 1111 1111
10 0000 0000
0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
0001 0000
0001 0001
0001 0010
0001 0011
0001 0100
0001 0101
0001 0110
0001 0111
0001 1000
0001 1001
0010 0000
.
.
0001 0010 0110
0001 0010 0111
0001 0010 1000
.
.
0101 0001 0000
0101 0001 0001
0101 0001 0010
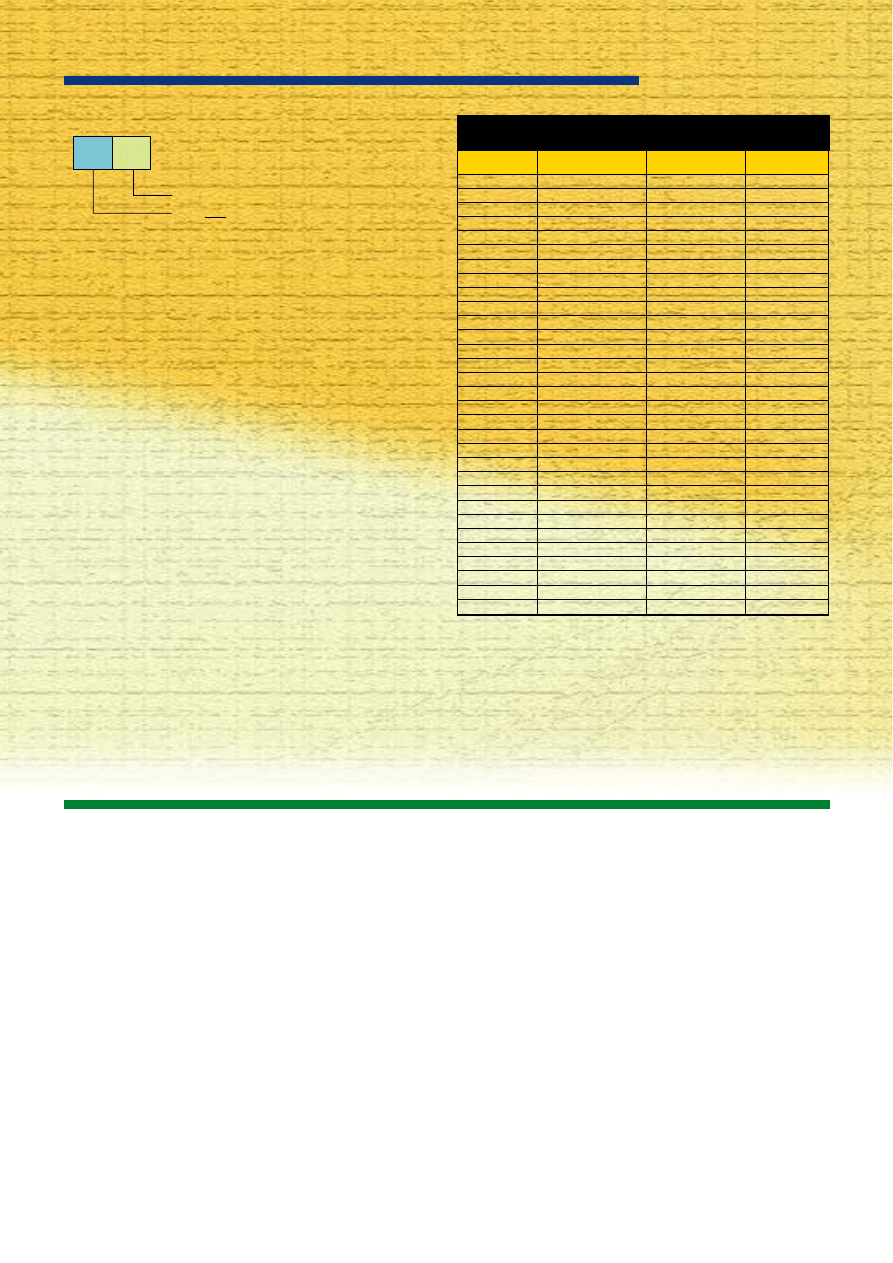
Tab. 1. Tabela konwersji liczb w postaciach:
dziesiętnej, binarnej, BCD i szesnastkowej.
Dziesiętnie
Binarnie
BCD
Szesnastkowo
Bity, bajty i†s³owa
Kaøda cyfra liczby binarnej
jest bitem. Osiem bitÛw tworzy
bajt. Dwa bajty lub 16 bitÛw
tworz¹ jedno s³owo (rys. 9).
Logiczne 0, logiczna 1
Sterowniki programowalne
mog¹ rozrÛøniÊ tylko dwa syg-
na³y: w³¹czone lub wy³¹czone.
Binarny system liczbowy jest
systemem, w†ktÛrym wystÍpu-
j¹ tylko dwie cyfry: 1†i†0.
Binarna 1†wskazuje, øe
sygna³ jest obecny lub prze-
³¹cznik jest za³¹czony. Binar-
ne 0†wskazuje, øe sygna³ jest
nieobecny lub prze³¹cznik jest
wy³¹czony (rys. 10).
Kod BCD
Binarne kodowanie dzie-
siÍtne (BCD) jest systemem
liczb dziesiÍtnych, w†ktÛrym
kaøda cyfra reprezentowana
jest przez cztery bity liczby
binarnej. Kod BCD jest czÍsto
uøywany w†urz¹dzeniach wej-
úciowych i†wyjúciowych ste-
rownikÛw.
Prze³¹cznik obrotowy (rys.
11) jest jednym z†przyk³adÛw
urz¹dzenia wejúciowego, ktÛre
wykorzystuje kod BCD. Liczby
b i n a r n e s ¹ p o g r u p o w a n e
w†czterocyfrowe grupy, kaøda
grupa reprezentuje liczbÍ dzie-
siÍtn¹. Czterocyfrowy prze³¹cz-
nik obrotowy (rys. 11) wyko-
rzystuje 16 wejúÊ PLC (4 x†4).
System szesnastkowy
System szesnastkowy jest
kolejnym systemem uøywanym
w†sterownikach programowal-
nych. Posiada on nastÍpuj¹ce
cechy charakterystyczne:
Szesnaúcie cyfr: 0, 1, ,2, 3, 4, 5,
6, 7, 8, 9, A, B, C, D, E, F
Podstawa: 16
Wagi: 1, 16, 256, 4096...
Dla pierwszych dziesiÍciu
cyfr systemu szesnastkowego
wykorzystanych jest dziesiÍÊ
cyfr systemu dziesiÍtnego. Dla
pozosta³ych szeúciu cyfr wy-
korzystanych jest pierwszych
szeúÊ liter alfabetu:
A†= 10
D†= 13
B†= 11
E†= 14
C†= 12
F†= 15
System szesnastkowy jest
uøywany w†PLC, poniewaø
umoøliwia czytelne przedsta-
wienie duøych liczb binarnych
w†stosunkowo ma³ych prze-
strzeniach, takich jak ekran
komputerowy lub wyúwietlacz
programatora. Kaøda cyfra
szesnastkowa reprezentuje
kombinacjÍ wartoúci czterech
bitÛw binarnych.
Aby przekszta³ciÊ liczbÍ
dziesiÍtn¹ na postaÊ szesnas-
tkow¹, naleøy j¹ dzieliÊ kolej-
no przez najwiÍksz¹ moøliw¹
potÍgÍ podstawy (16).
Na przyk³ad, aby przekszta³-
ciÊ dziesiÍtne ì28î do postaci
szesnastkowej, naleøy wykonaÊ
nastÍpuj¹ce dzia³anie: dziesiÍt-
ne ì28î podzieliÊ przez 16, co
daje 1†i†resztÍ 12. Liczbie 12
w†zapisie szesnastkowym odpo-
wiada C. Szesnastkowy odpo-
wiednik dziesiÍtnej liczby 28
wynosi wobec tego ì1Cî.
WartoúÊ dziesiÍtna liczby
szesnastkowej otrzymywana
jest przez pomnoøenie poszcze-
gÛlnych cyfr tej liczby przez
35
Elektronika Praktyczna 1/2000
Wyszukiwarka
Podobne podstrony:
12,33,35,37
33 35 (3)
33 35
33 35 (4)
33 35 (2)
33 35
33 35
33 35 (5)
33 35
AFV Interiors CV 33 35
33 35 (7)
33 35 206cc pol ed02 2006
odp na 33 34 35, mgr inż
więcej podobnych podstron