
Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 2 str. 1/7
ĆWICZENIE 2
WYBRANE ELEKTRYCZNE CZUJNIKI-PRZETWORNIKI
PRZESUNIĘĆ LINIOWYCH I KĄTOWYCH
1.CEL ĆWICZENIA:
zapoznanie się z podstawowymi czujnikami-przetwornikami przesunięć liniowych i
kątowych oraz ich zastosowaniami w automatyce przemysłowej.
Jednym z ważniejszych zagadnień w technologii drewna jest pomiar długości, szerokości
i grubości poszczególnych elementów wykonanych z drewna i tworzyw drzewnych.
Bezpośrednie pomiary wymagają zaangażowania pracy ludzkiej i są obarczone dużym
błędem subiektywnym.
Czujniki-przetworniki można sklasyfikować w następujący sposób (nazwy czujnik
i przetwornik można używać zamiennie):
1. ze względu na charakter przetwarzanych sygnałów:
analogowe,
cyfrowe,
analogowo-cyfrowe.
2. ze
względu na sposób przetwarzania:
- generacyjne (wielkość nieelektryczna jest bezpośrednio przetwarzana na wielkość
elektryczną na skutek działania wielkości nieelektrycznej powstaje siła elektromotoryczna
lub ładunek elektryczny; wykorzystuje się tu zjawiska: indukcji elektrycznej,
termoelektryczne, piezoelektryczne, fotoelektryczne np. w ogniwie fotoelektrycznym,
termoelemencie),
- parametryczne (wielkość wejściowa powoduje zmianę wybranego parametru czujnika
np. impedancji, rezystancji: do wykrycia zmiany parametru potrzebna jest energia
pomocnicza).
Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 2 str. 2/7
Jakość czujników-przetworników określona jest przez:
1. charakterystykę statyczną — wykres zależności pomiędzy wartościami x wielkości
wejściowej i odpowiadającymi im wartościami y wielkości wyjściowej y = f(x)
2. zakres pomiarowy — zakres wartości wielkości wejściowej, w którym przetwarzanie
odbywa się w określonej klasie dokładności.
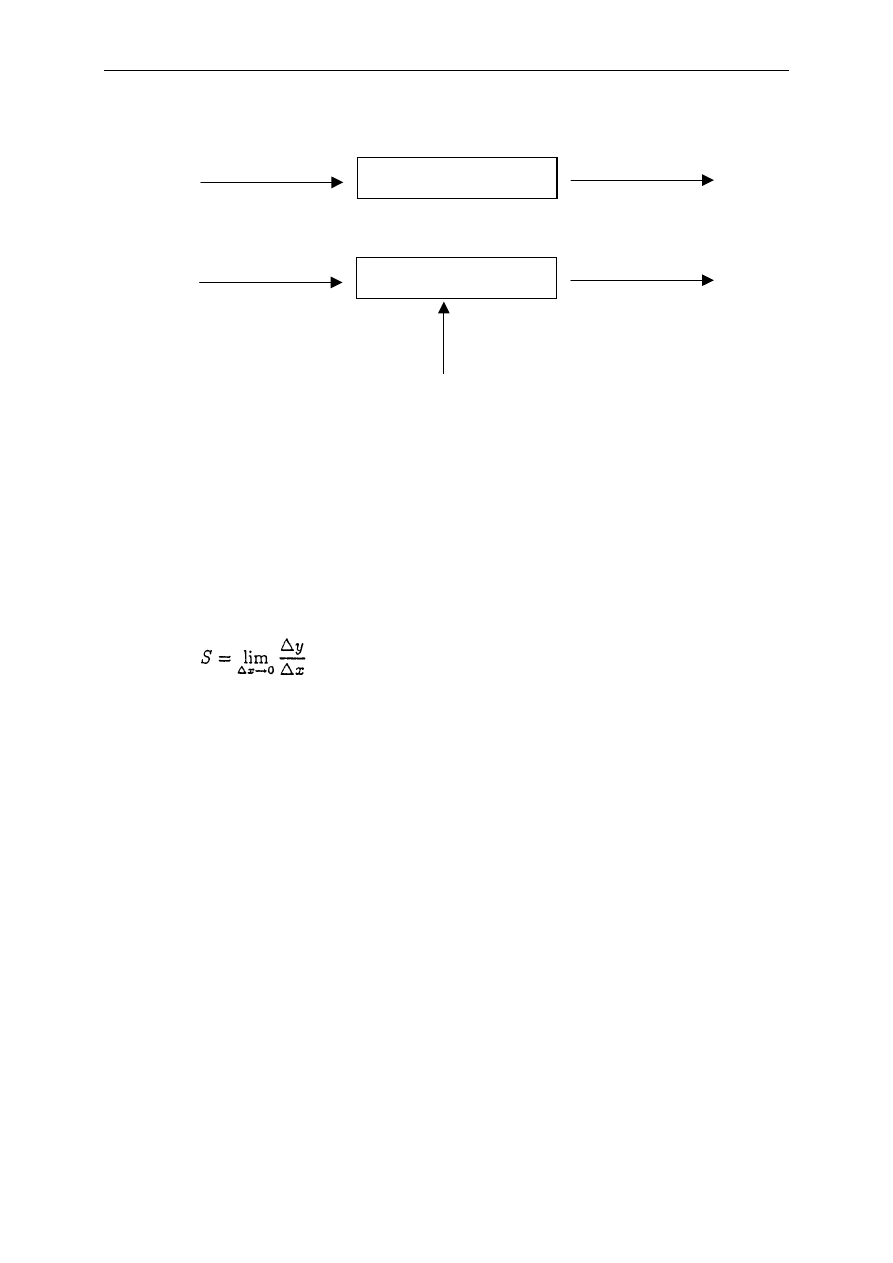
3. czułość statyczna S — granica stosunku przyrostu ∆y wielkości wyjściowej do
wywołującego te zmianę przyrostu ∆x wielkości wejściowej:
Czułość statyczna jest wielkością mianowaną.
4. stała czujnika — odwrotność czułości.
Powyższe parametry są ze sobą powiązane, często w sposób przeciwstawny. Chcąc na
przykład w czujnikach indukcyjnościowych uzyskać dużą czułość i dużą moc sygnału
wyjściowego pogarsza się liniowość charakterystyki statycznej.
Dla potrzeb automatyki stosuje się czujniki-przetworniki przesunięć liniowych i kątowych z
wyjściowym sygnałem w postaci napięcia elektrycznego (tzw. czujniki elektryczne). Dogodne
jest to w przekazywaniu wyników pomiarów na odległość, w sygnalizacji np. przy pomiarze
stopnia otwarcia zaworu, kontroli wymiarów i kształtu wyrobów w zautomatyzowanej linii
produkcyjnej. Często w czujnikach-przetwornikach stosuje się kilkakrotne przetwarzanie
jednej wielkości na kolejne inne wielkości w celu uzyskania odpowiedniej dokładności
pomiaru.
Czujnik generacyjny
i l k
i lk
X
Y
Czujnik parametryczny
X
Y
Nieelektryczna wielkość
wejściowa
Elektryczna wielkość
wyjściowa
Energia pomocnicza
Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 2 str. 3/7
c)
Czujniki indukcyjnościowe
Należą do czujników analogowych parametrycznych. Wykorzystuje się tu najczęściej
zależność zmiany przewodności magnetycznej od zmian wymiarów szczeliny utworzonej
między cewką a ruchomym rdzeniem. Budowane są w układach:
• dławikowym,
• różnicowym,
• mostkowym,
• transformatorowym.
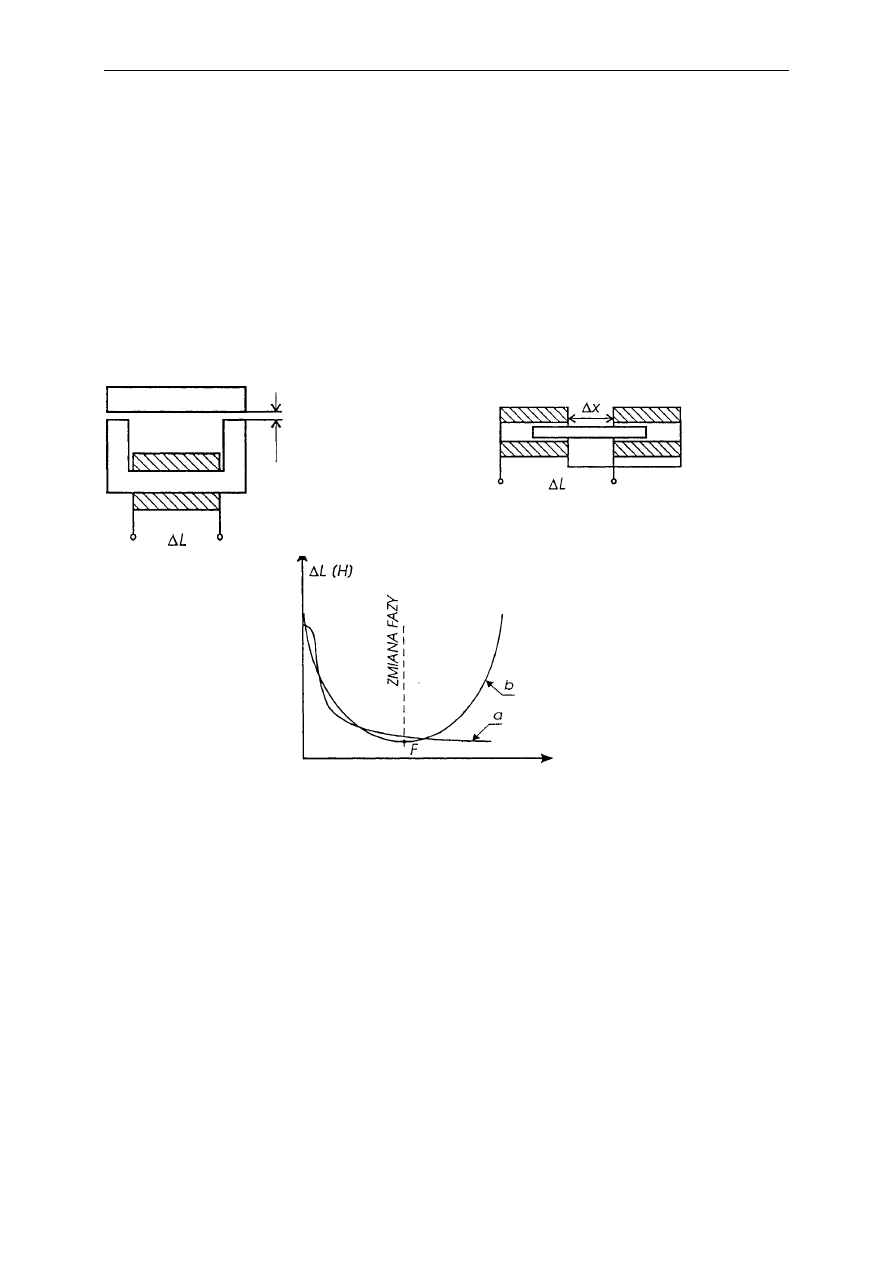
Rys 1.
a) dławikowy czujnik indukcyjnościowy. o zmiennej szer. szczeliny powietrznej
b) różnicowy czujnik solenoidalny,
c) charakterystyka statyczna obu czujników.
Na rys. 1a i lb przedstawiono schematy czujników indukcyjnościowych: dławikowego
czujnika indukcyjnego o zmiennej szerokości szczeliny powietrznej i różnicowego czujnika
solenoidalnego oraz ich charakterystyki statycznej (rys. lc).
Punkt oznaczony literą F na rys. lc. charakteryzuje się zmianą fazy natężenia prądu względem
napięcia zasilającego ten układ. Dzięki temu, stosując układ fazoczuły, można uzyskać np.
miernik z punktem zerowym w środku skali. Odchylenia wskazówki takiego miernika oprócz
wartości bezwzględnej będą wskazywać na kierunek zmian mierzonej wartości (dodatni lub
ujemny względem zera).
b)
a)
∆X
Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 2 str. 4/7
Czułość układów pomiarowych z indukcyjnościami zwiększa się, łącząc je w konfiguracji
mostkowej. Ze względu na indukcyjności mostki takie są zasilane napięciem przemiennym.
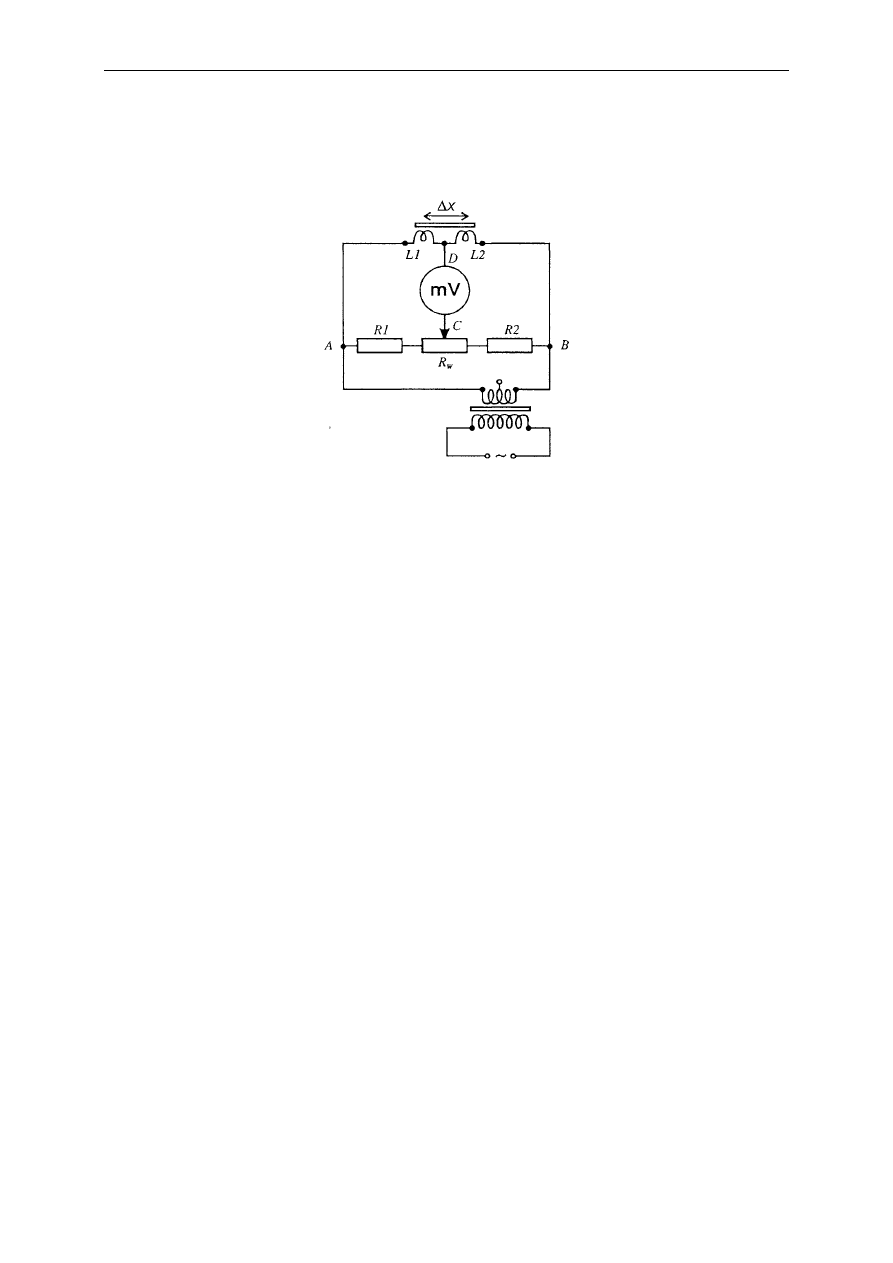
Rys. 2. Układ mostkowy do współpracy z czujnikiem różnicowym solenoidalnym.
Na rys.2. przedstawiono schemat układu mostkowego współpracującego z czujnikiem
różnicowym. Czujnik taki składa się z dwu identycznych uzwojeń cylindrycznych
(solenoidów) L1 i L2, wewnątrz których znajduje się przesuwny rdzeń ferrytowy. W stanie
spoczynku jest on położony dokładnie w elektrycznym środku, tak że indukcyjności obu
uzwojeń są sobie równe. Z jednej strony rdzeń jest połączony z trzpieniem. Obiekt np.
formatka oddziałuje na trzpień i przemieszcza go w poziomie, dzięki czemu można mierzyć
gabaryty np. grubość.
W położeniu spoczynkowym rdzenia mostek jest zrównoważony za pomocą rezystorów Rl i
R2 . Jeżeli rdzeń przesunie się w prawo, to większa jego część znajdzie się w cewce L2, a jej
indukcyjność i reaktancja indukcyjna wzrosną. Indukcyjność cewki L1 będzie w związku z
tym mniejsza i mostek zostanie rozstrojony. Wychylenie wskazówki przyrządu pomiarowego
będzie zatem miarą drogi, którą przebył rdzeń.
Przetwornik obrotowo— impulsowy.
Należy do grupy przetworników analogowo-cyfrowych. Umożliwia dokonanie precyzyjnych
cyfrowych pomiarów przesunięć kątowych, liniowych oraz innych wielkości fizycznych,
dających się przetworzyć na jedno z powyższych przesunięć.
Do pomiaru przesunięć kątowych oprócz czujników używanych do pomiaru przesunięć
liniowych, stosowane są tzw. transformatory obrotowe np. selsyny.

Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 2 str. 5/7
2.LITERATURA
1. J.Kostro: Elementy, urządzenia i układy automatyki, WSZP 1983.
2. D.Turzeniecka: Laboratorium z metrologii elektrycznej i elektronicznej, skrypt PP 1996.
3.PRZEBIEG ĆWICZENIA:
Student wykonuje wybrane punkty ćwiczenia zgodnie z zaleceniami prowadzącego.
3.l. Wyznaczenie charakterystyki statycznej ∆L= f (∆x) dławikowego czujnika
indukcyjnościowego o zmiennej szerokości szczeliny powietrznej.
Określić zależność zmian indukcyjności ∆L czujnika (rys.la.) od zmian szerokości ∆x
szczeliny powietrznej pomiędzy dwiema częściami rdzenia ferromagnetycznego.
Indukcyjność mierzyć za pomocą automatycznego mostka RLC, począwszy od szerokości
szczeliny powietrznej ∆x = 0 mm co 0.25 mm do ∆x = 10 mm. Wyniki przedstawić w tabeli i
na wykresie.
3.2. Wyznaczenie charakterystyki statycznej ∆L=f(∆x) solenoidalnego czujnika
indukcyjnościowego różnicowego.
Określić zależność zmian indukcyjności ∆L czujnika (rys. lb.) od zmian przemieszczenia ∆x
rdzenia ferromagnetycznego . Indukcyjność mierzyć za pomocą automatycznego mostka RLC
w zakresie ∆x = 6 mm co 0.25 mm począwszy od lewego skrajnego położenia rdzenia.
Wyniki przedstawić w tabeli i na wykresie.
3.3. Współpraca różnicowego czujnika indukcyjnościowego z mostkowym układem
pomiarowym.
Połączyć układ pomiarowy według schematu z rys.2. Określić zależność wskazań
woltomierza od zmian położenia rdzenia ferromagnetycznego czujnika dla dwu wartości
napięcia zasilania: U=9 V i U==13 V.
Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 2 str. 6/7
W tym celu należy najpierw znaleźć wartość zerową wskazań woltomierza tranzystorowego
(czyli elektryczny środek czujnika) Uzyskuje się to poprzez równoważenie mostka metodą
kolejnych przybliżeń.
Metoda kolejnych przybliżeń:
1. Nastawić zakres woltomierza na l V.
2. Znaleźć takie położenie rdzenia ferromagnetycznego czujnika, aby woltomierz
wskazał minimalną wartość.
3. Zmienić nastawę rezystora RW tak, aby woltomierz wskazał minimalną wartość.
4. Kroki 2-3 powtarzać kolejno dla poszczególnych zakresów woltomierza, aż do 10 mV.
Po zrównoważeniu mostka określić zależność wskazań woltomierza od zmian położenia
rdzenia ferromagnetycznego przesuwając rdzeń najpierw w prawo od elektrycznego środka
do położenia krańcowego co 0.25 mm, a następnie w lewo od elektrycznego środka również
do położenia krańcowego co 0.25 mm. Wyniki dla obu napięć zasilania przedstawić w tabeli i
na wykresach.
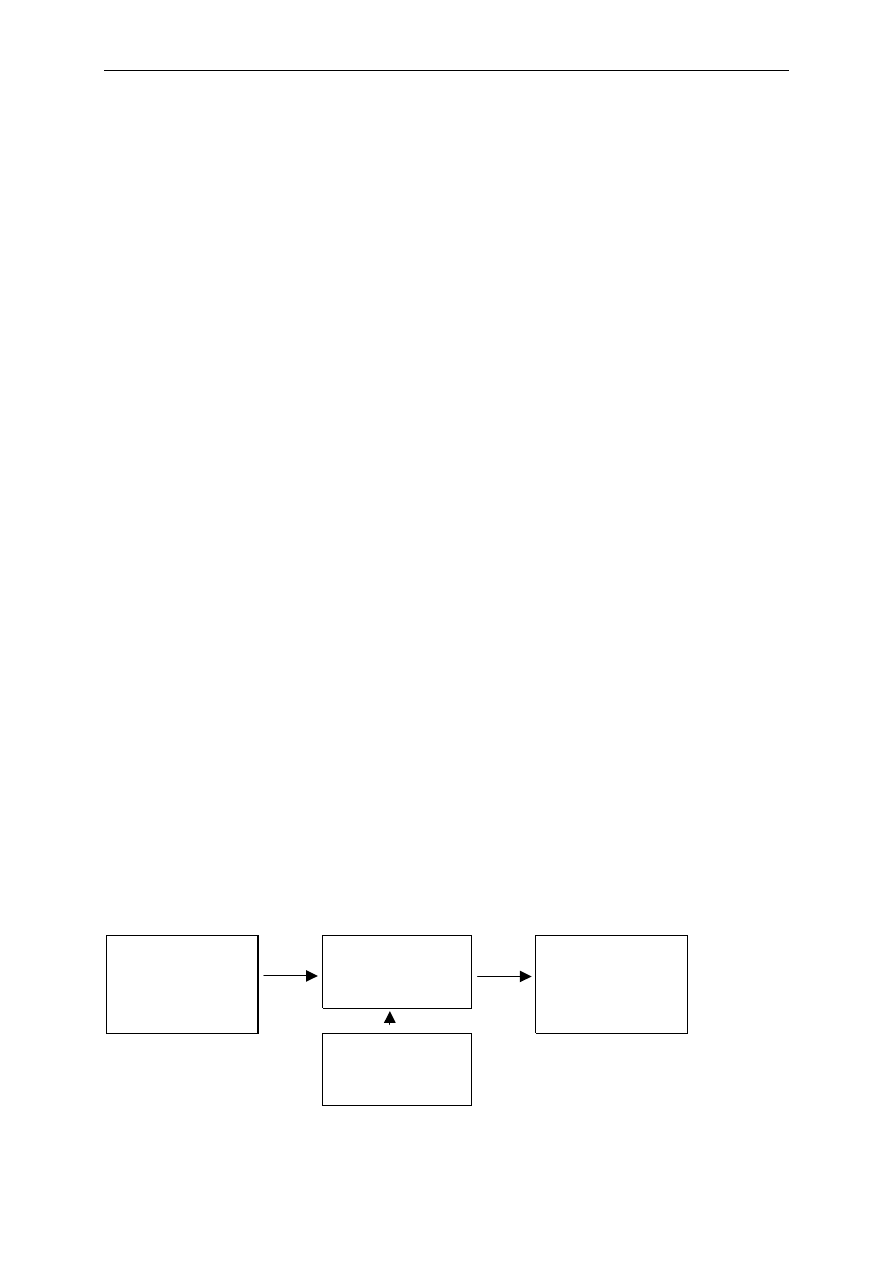
3.4. Sprawdzenie miniaturowego przetwornika obrotowo—impulsowego.
Połączyć układ pomiarowy przetwornika obrotowo-impulsowego z licznikiem rewersyjnym
według schematu blokowego na rys.3. (bez układu z suwmiarką). Następnie zapoznać się z
zasadą działania i możliwościami operacyjnymi zestawu dla następujących funkcji licznika:
A - zliczanie impulsów z toru A,
-A - zliczanie impulsów z toru A z przeciwnym znakiem,
A+B - sumowanie impulsów z torów A i B,
A-B - odejmowanie impulsów zliczanych z torów A i B,
A(B) - sumowanie lub odejmowanie impulsów zliczanych z obu torów.
PRZETWORNIK
OBROTOWO -
IMPULSOWY
ZASILACZ
LICZNIK
REWERSYJNY
UKŁAD
POMIAROWY
Z SUWMIARKĄ
Rys.3. Schemat blokowy układu do badania czujnika obrotowo - impulsowego.

Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 2 str. 7/7
Wybrać funkcję A(B) licznika. Określić kilkakrotnie ilość impulsów przypadających na jeden
pełen obrót tarczy przetwornika i wyznaczyć jego średnią rozdzielczość (kąt przypadający na
jeden impuls) przy pomiarze przemieszczeń kątowych.
Następnie dołączyć do tarczy przetwornika obrotowo-impulsowego układ z suwmiarką i
zastosować przetwornik do pomiaru przemieszczeń liniowych. Ustawić na suwmiarce punkt
startowy, wyzerować licznik przyciskiem RESET START i ostrożnie obracając tarczą,
przesuwać suwmiarkę co l mm do ∆x = 5 mm, notując wskazania licznika. Określić
rozdzielczość układu pomiarowego. Sporządzić wykres N = f(∆x), gdzie N - liczba impulsów
wskazywanych przez licznik, ∆x - przesunięcie liniowe.
Wyszukiwarka
Podobne podstrony:
lab pwsp 02 id 258616 Nieznany
CCNA4 lab 3 3 2 pl id 109125 Nieznany
HUR2006 02 id 207255 Nieznany
26429 02 id 31504 Nieznany (2)
CwiczenieArcGIS 02 id 125937 Nieznany
Lab nr 3 id 258529 Nieznany
Grafy Grafy[02] id 704802 Nieznany
awans 02 id 74352 Nieznany (2)
CCNA4 lab 4 3 7 pl id 109128 Nieznany
Zestaw 02 id 587899 Nieznany
lab 04 id 257526 Nieznany
bd lab 04 id 81967 Nieznany (2)
cwiczenie 02 id 125037 Nieznany
Perswador 02 id 354972 Nieznany
CCNA4 lab 5 2 2 pl id 109130 Nieznany
lab fizycz id 258412 Nieznany
PMK lab potoczny id 363423 Nieznany
Lab 3 WDAC id 257910 Nieznany
Axis se 02 id 74597 Nieznany
więcej podobnych podstron