
Z jednostką centralna mikrokontrolera współpracuje układ przerwań. W mikrokontrolerach
rodziny 8051 stosuje się jeden standardowy mechanizm obsługi przerwań. Źródłem przerwań
są wydarzenia w wewnętrznych urządzeniach peryferyjnych (np. przepełnienie układu
czasowego) lub w zewnętrznym otoczeniu mikrokontrolera (zmiana stanu logicznego na
określonym wyprowadzeniu). Takie wydarzenie prowadzi do zaprzestania wykonywania
bieżącego programu i skoku do określonego miejsca w przestrzeni adresowej. Licznik
przerwań zależy od liczby i stopnia komplikacji wewnętrznych urządzeń peryferyjnych.
Nie w każdym przypadku wystąpienie przyczyny przerwania musi doprowadzić natychmiast
do przerwania bieżącego programu. Istnieją bowiem dwa warunki przejścia do obsługi
przerwania:
- przerwanie musi być dopuszczone, bowiem programista może każde przerwanie
indywidualnie dopuścić lub zablokować,
- nie jest aktualnie obsługiwane przerwanie o wyższym priorytecie.
Nadawanie priorytetów przerwaniom przez programistę w przypadku 8051 jest ograniczone i
polega tylko na możliwości zadeklarowania każdego przerwania na jednym z dwóch
poziomów priorytetów.
Różnice między układami 8051 i 80166 w zakresie normalnych przerwań:
- 80166 posiada znacznie więcej źródeł przerwań, tj. 32,
- bardziej rozbudowane możliwości ustalania przez użytkownika priorytetów przerwań,
- obsługa przerwań może nastąpić szybciej, bowiem w układzie 80166 od razu precyzyjnie
wiadomo, co jest źródłem przerwania,
Możliwa jest obsługa przerwań za pomocą zupełnie innego mechanizmu – kanałów PEC
(Peripherial Event Controler – kontroler zdarzeń peryferyjnych)
Rozwój wewnętrznych układów peryferyjnych mikrokontrolerów jest jednym
z podstawowych kierunków ich rozwoju. W strukturach pierwszych mikrokontrolerów
umieszczane były tylko podstawowe urządzenia peryferyjne: porty, łącze komunikacji
szeregowej oraz proste układy czasowe. Od tego czasu do chwili obecnej nastąpił znaczny
postęp rozwoju wewnętrznych urządzeń peryferyjnych mikrokontrolerów:
- w
strukturze
mikrokontrolera integrowano więcej urządzeń peryferyjnych,
- są to urządzenia bardziej „inteligentne”, tzn. są wstanie samoczynnie
realizować złożone funkcje bez ingerencji jednostki centralnej,
- są bardziej wyspecjalizowane.
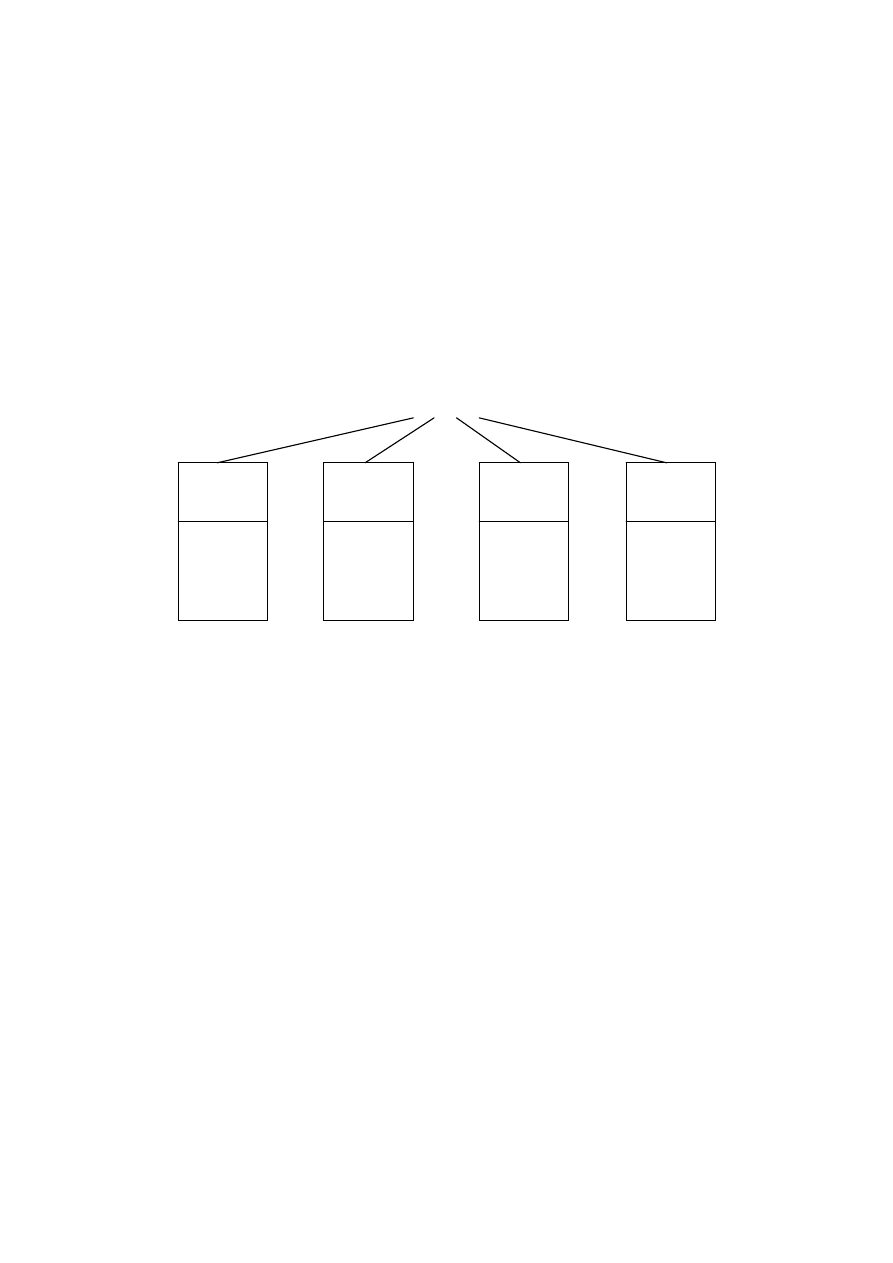
Urządzenia peryferyjne współczesnych mikrokontrolerów można podzielić na kreślone grupy
funkcyjne.
Układy peryferyjne mikrokontrolerów
Łącza
równoległe
Ports
PCIAMCIA
Sterowniki
komunikacji
szeregowej
UART
SCC
I
2
B
CAN
Układy
czasowe
Timers
Counters
PWM
CAPCOM
RTC
Układy
nadzorujące
Watchdog
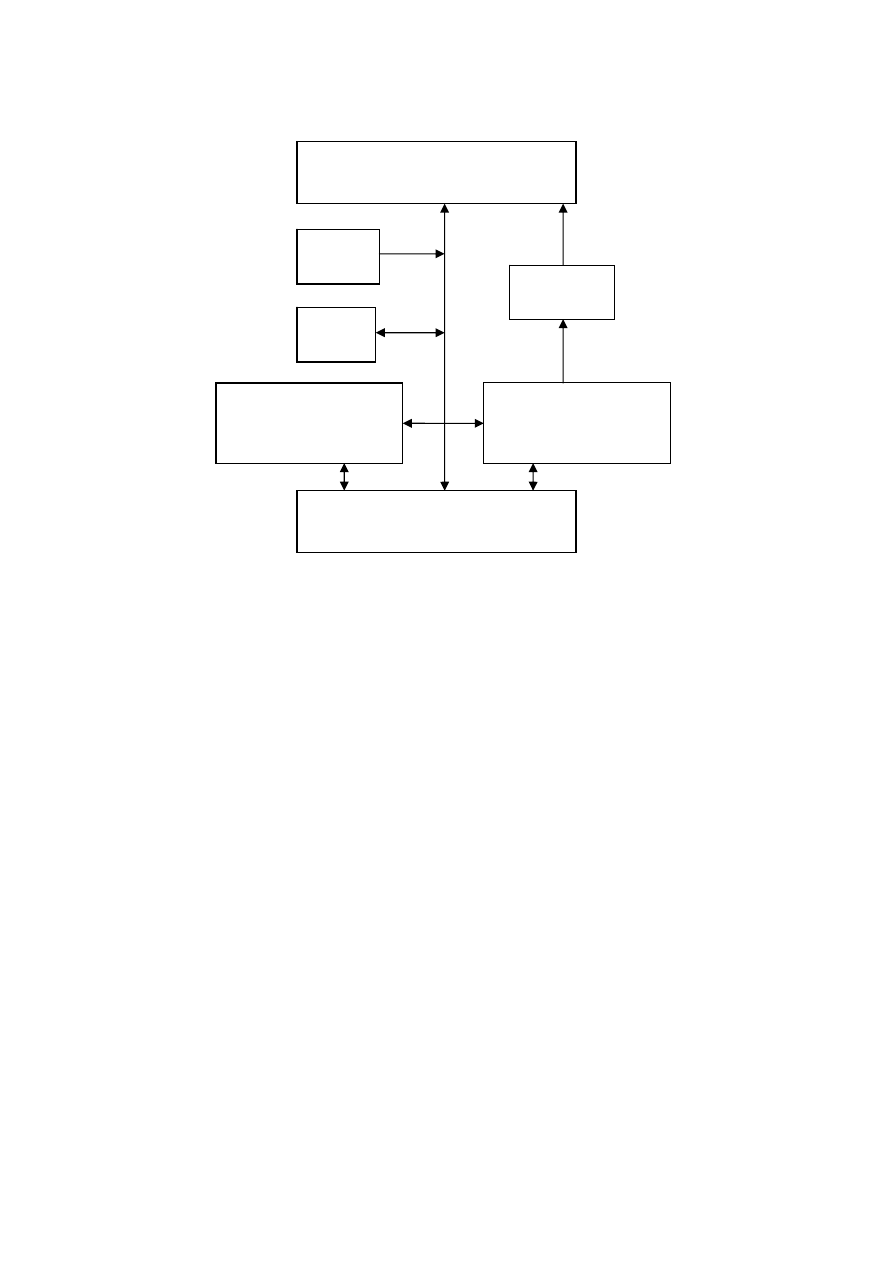
8051
Jednostka centralna 8051:
- architektura typu CISC,
- architektura akumulatorowa – tzn. niektóre rozkazy, m. in. operacje arytmetyczne,
muszą wykorzystywać jeden wyróżniony rejestr wewnętrzny o nazwie akumulator,
- możliwość wykonywania operacji na pojedynczych bitach,
- model pamięci typu Harvard (rozdzielona przestrzeń adresowa dla pamięci programu
i pamięci danych).
Wewnętrzne szyny
systemowe
jednostka centralna
pamięć
ROM
pamięć
RAM
układ
przerwań
sterownik
zewnętrznych szyn
systemowych
wewnętrzne
urządzenia
peryferyjne
porty
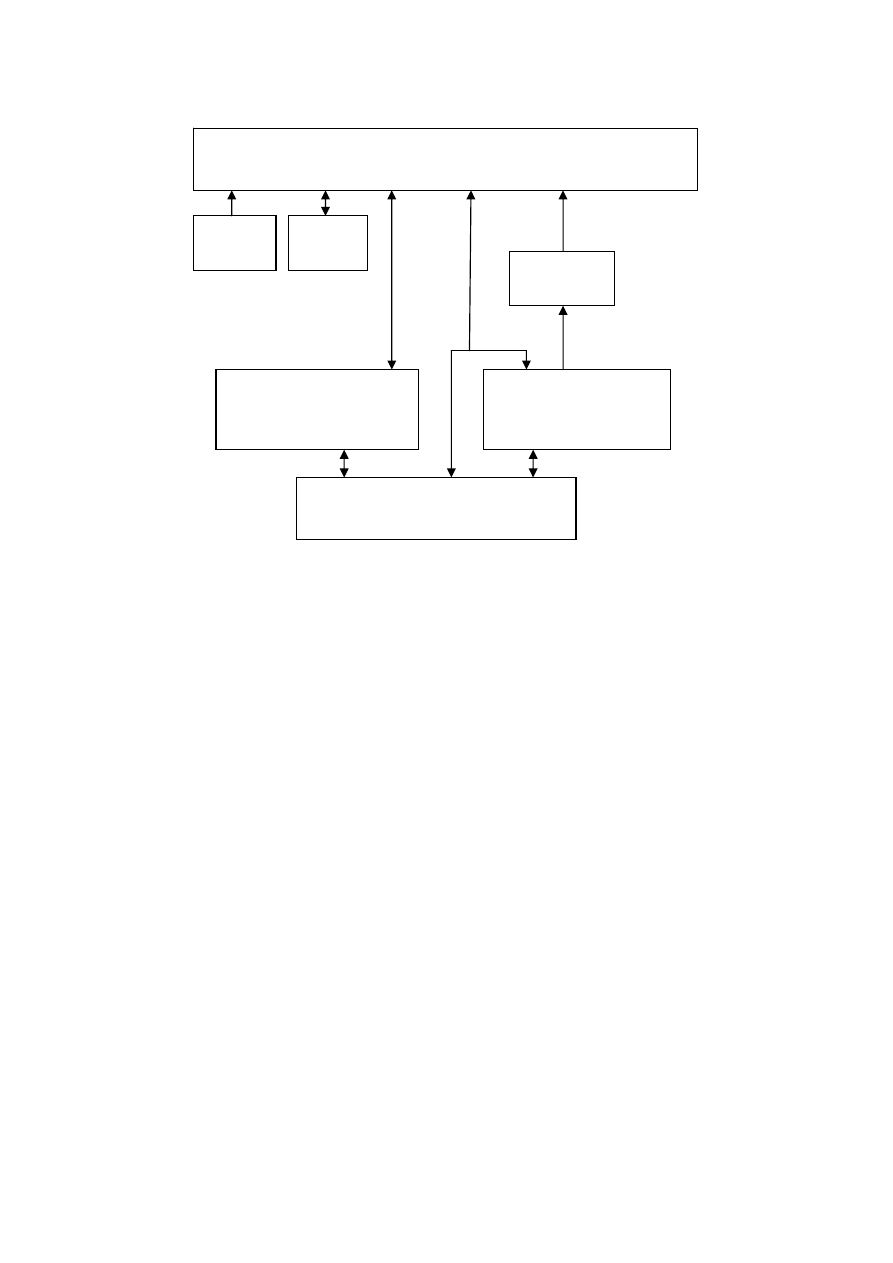
80166
Jednostka centralna 80166:
- architektura typu RISC,
- czteropoziomowa struktura potokowa,
- brak akumulatora.
Wewnętrzne szyny
systemowe
jednostka centralna
pamięć
ROM
pamięć
RAM
układ
przerwań
sterownik zewnętrznych
szyn systemowych
wewnętrzne
urządzenia
peryferyjne
porty
Wyszukiwarka
Podobne podstrony:
13 programowalny kontroler przerwan 8259
Dz Urz KGP Nr 16
CW 06 B przerw
ADA wyjatki przerw3
CHRAPEK,podstawy robotyki, Urz dzenia chwytaj ce i g owice technologiczne robotów przemys owych cz 2
Instr. kontr.urz.gaszącego, Instrukcje w wersji elektronicznej
Twórczość Kazimierza Przerwy -Tetmajera, Szkoła, Język polski, Wypracowania
Jak przerwać wykonywanie pętli (for, PHP Skrypty
projektowanie stron na urz%c4%85dzenia mobilne
przerwa
przerwan
Eksploatacja maszyn i urz dze WICHA
111-4, materiały studia, 111. WYZNACZANIE SZEROKOŚCI PRZERWY ENERGETYCZNEJ W PÓŁPRZEWODNIKU METODĄ T
kospekt12, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium, 12 Wyznaczanie
więcej podobnych podstron