1. Spis maszyn i urządzeń użytych w ćwiczeniu:
•
Silnik indukcyjny klatkowy typu SZEe24a nr fab. 528528
P
n
=1,5kW
U
n
=380V
I
n
=3,5A
f=50Hz
cosφ=0,8
n
n
=1420 obr/min
R
s
=13,6 Ω (t=20
o
c)
ΔP
Fe
=100W (U=U
n
)
Δp
m
=210W
•
V - Woltomierz prądu przemiennego,
Klasa 0,5
Ilość działek 120
•
A – Amperomierz prądu stałego,
Klasa 0,5
Zakres 2,5/5A
•
prądnica tachometryczna
120V-1500obr/min
•
Przekładnik prądowy laboratoryjny typ JL3 KME IV-a-203
ϑ
=2
•
Soft start SV1,5
o mocy od 1,5 do 55 kW
•
Oscylograf pętnicowy T-386-3
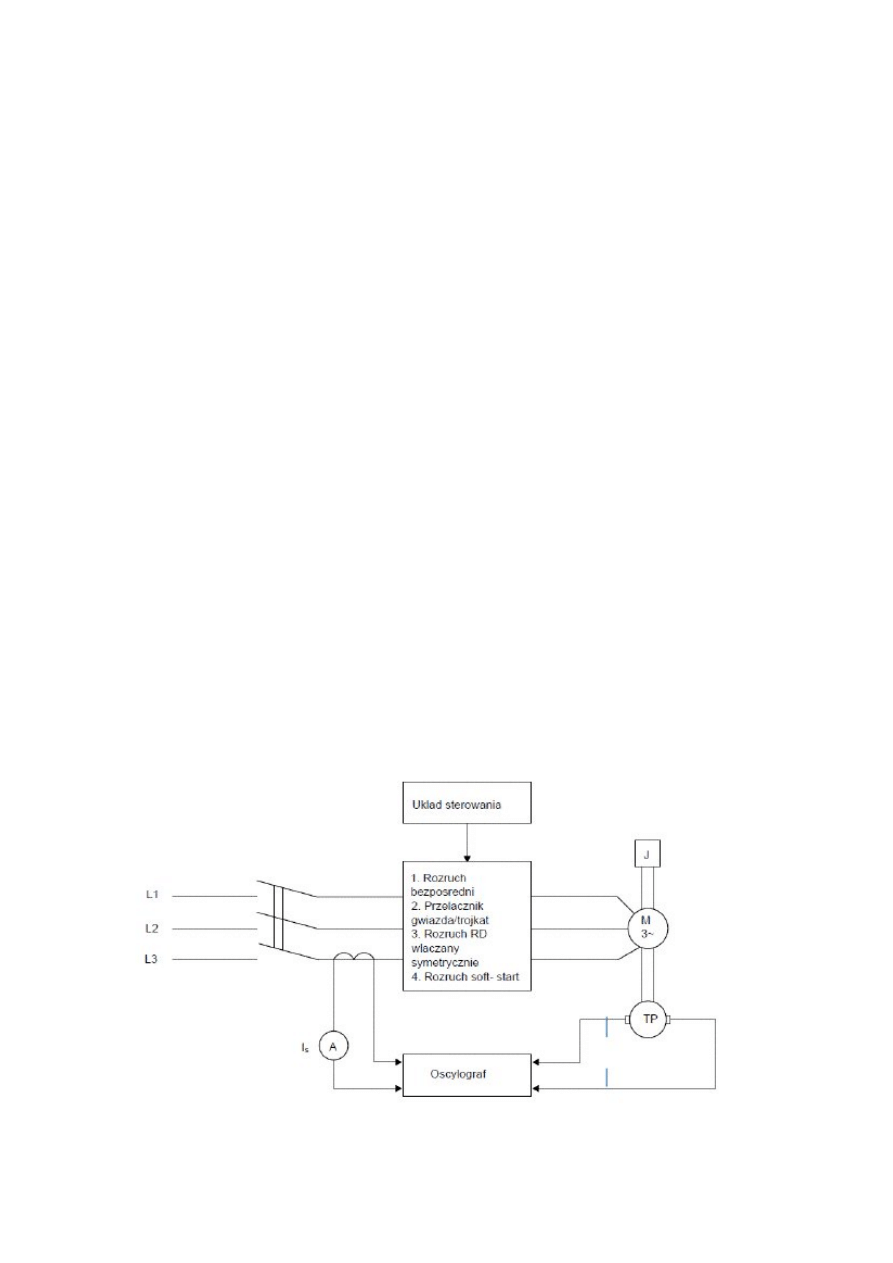
2. Schemat układu pomiarowego
Rysunek 1: Schemat pomiarowy do badania rozruchu silnoków indukcyjnych
3. Przykładowe obliczenia
•
Prędkość synchroniczna
ω
0
=
118
120
⋅
1500=1475
obr
min
•
Stała oscylogramu prędkości
c
ω
=
ω
0
a '
ω
=
1475
80
=
18,4
1
mm⋅min
gdzie
a '
ω
- najwyższe wskazanie prędkości
•
Wartość prędkości kątowej
ω=
a
ω
⋅
c
ω
=
80⋅18,4=1472
1
min
gdzie a
ω
- wskazanie oscylografu
•
Poślizg silnika
s=
ω
0
−ω
ω
0
=
1475−1472
1475
=
2⋅10
−
3
•
Stała oscylogramu prądu
C
I
=
I
A
a '
I
=
44⋅
2,5
100
⋅
2
11
=
0,2
A
mm
gdzie
I
A
- wskazanie amperomierza
a '
I
- najmniejsze wskazanie oscylografu
•
Wartość prądu
I =a
I
⋅
c
I
=
11⋅0,2=2,2 A
•
Względna wartość prądu silnika
i
s
=
I
s
I
N
=
2,2
3,5
=
0,63
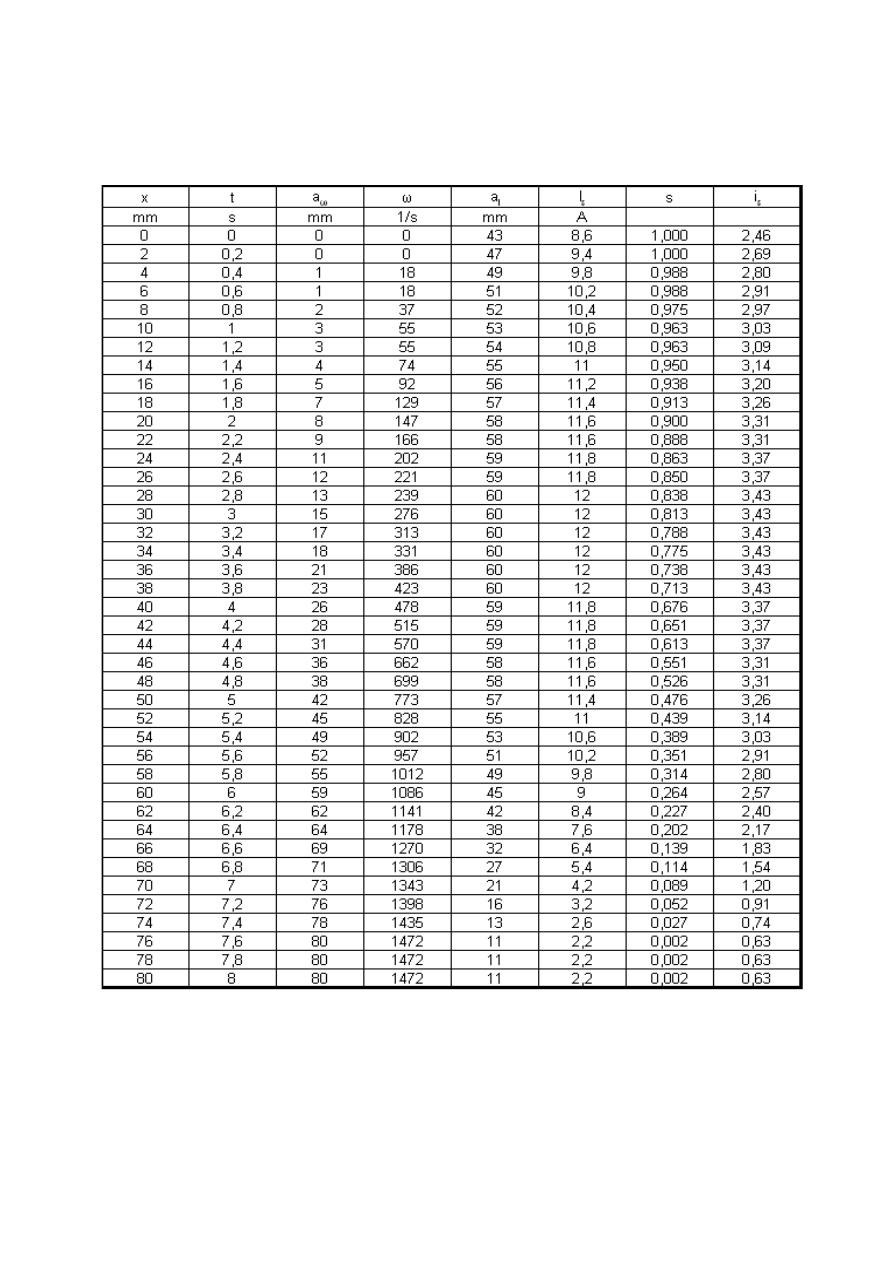
4. Wyniki dla pomiarów przy zastosowaniu różnych metod rozruchu
1. Metoda bezpośrednia
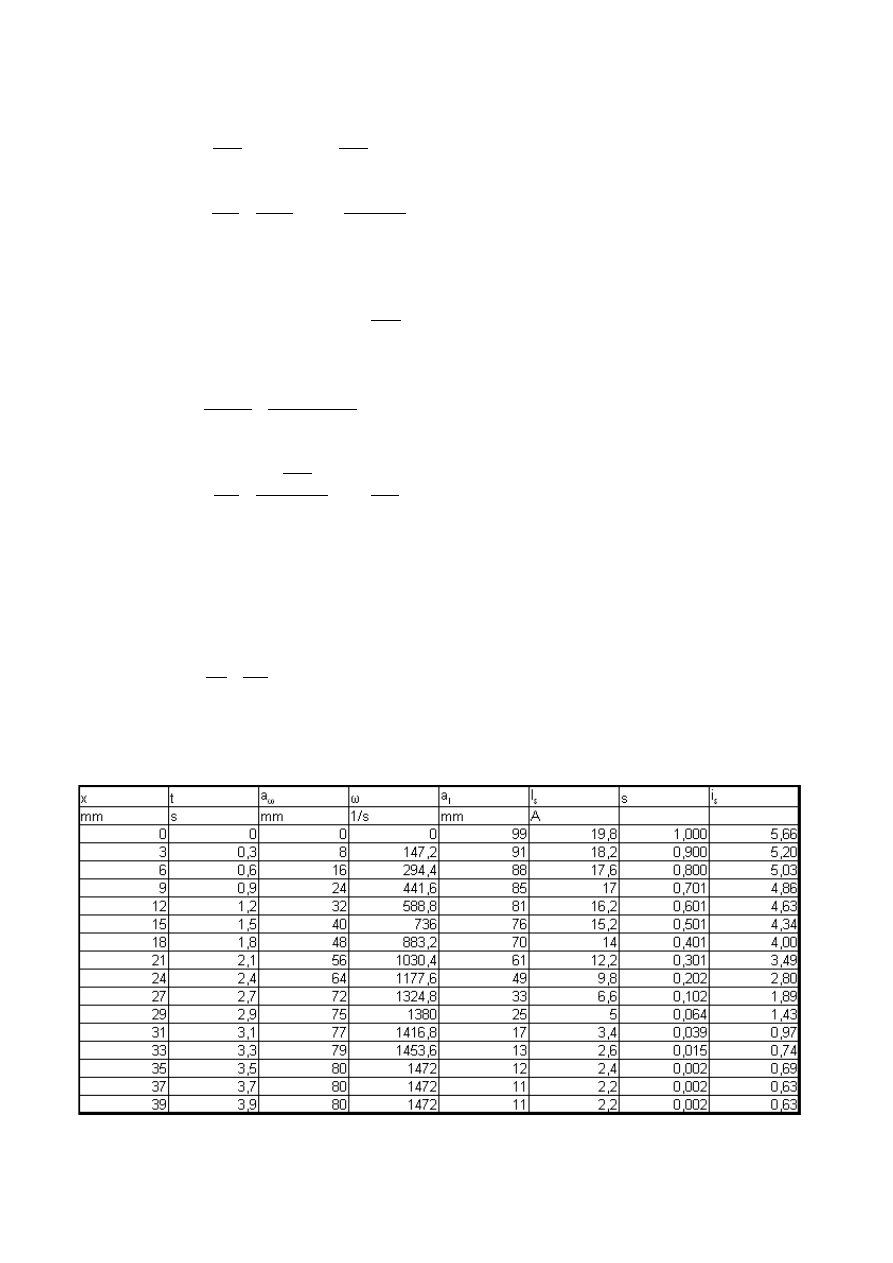
Tabela 1: Wyniki pomiarów i obliczeń dla rozruchu bezpośredniego
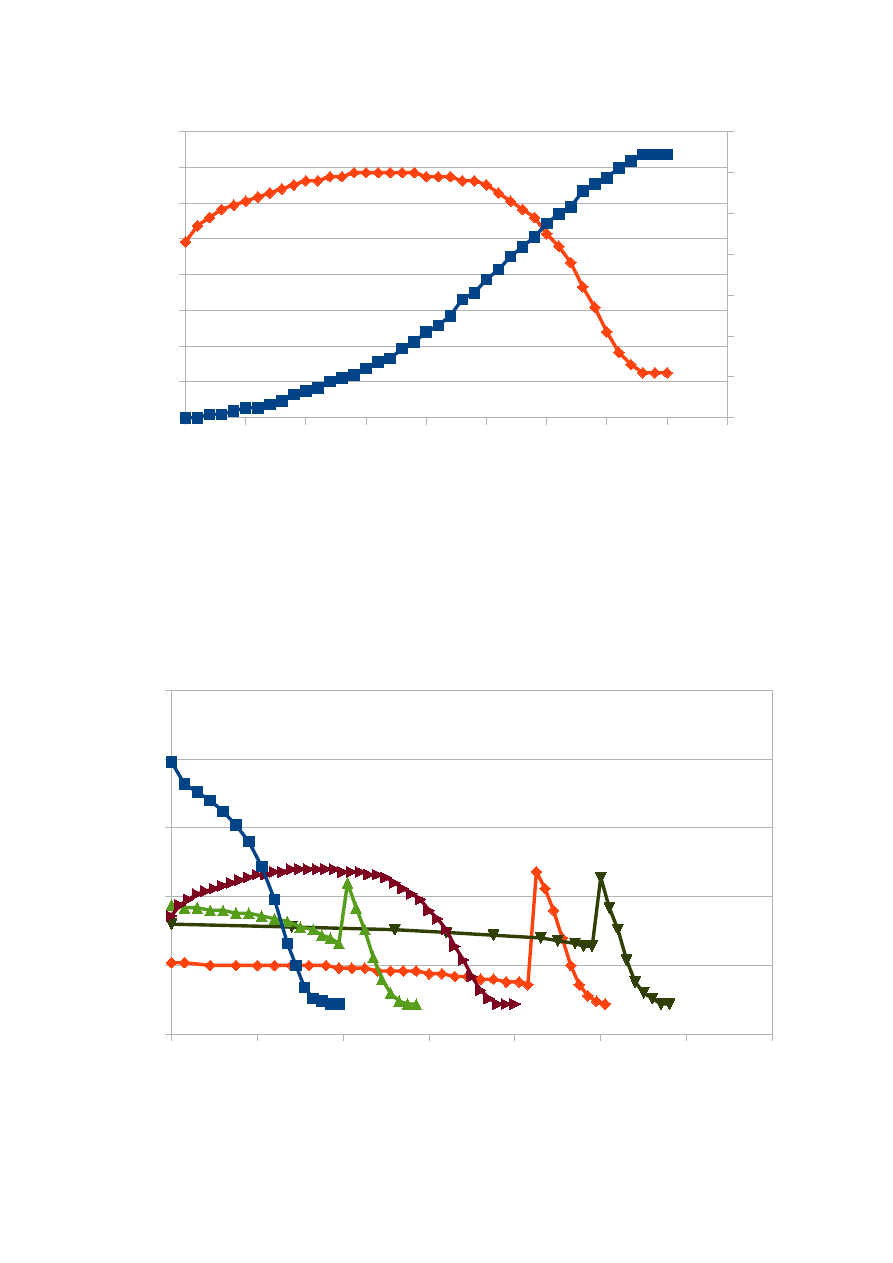
Dla rozruchu bezpośredniego obserwujemy krótki czas osiągnięcia stanu ustalonego, lecz
jednocześnie mamy do czynienia z bardzo wysoką wartością prądu na początku rozruchu.
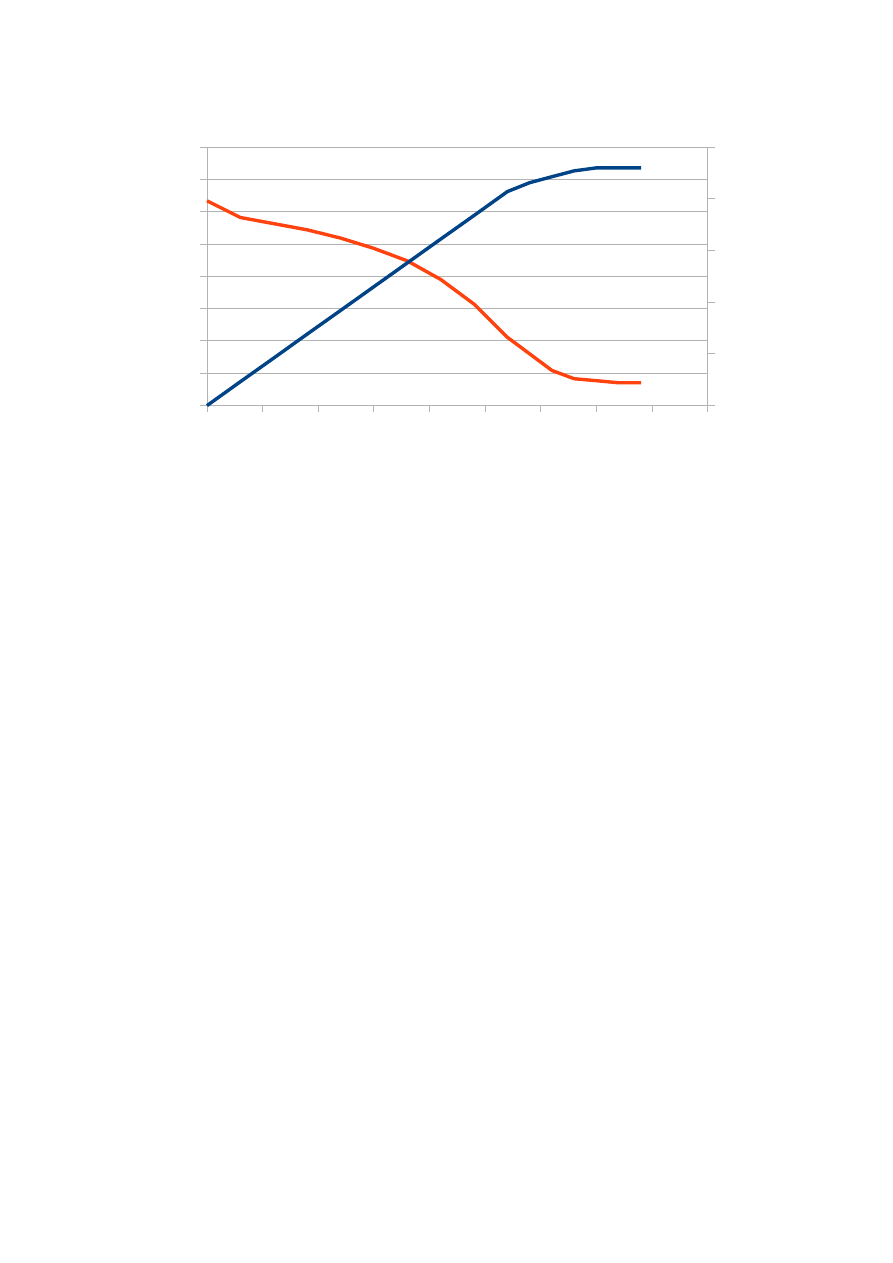
Wykres 1: Charakterystyka prędkości kątowej i natężenia prądu w rozrychu bezpośrednim
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
0
200
400
600
800
1000
1200
1400
1600
0
5
10
15
20
25
t,s
ω
, 1
/m
in
I,A
2. Przełącznik gwiazda-trójkąt
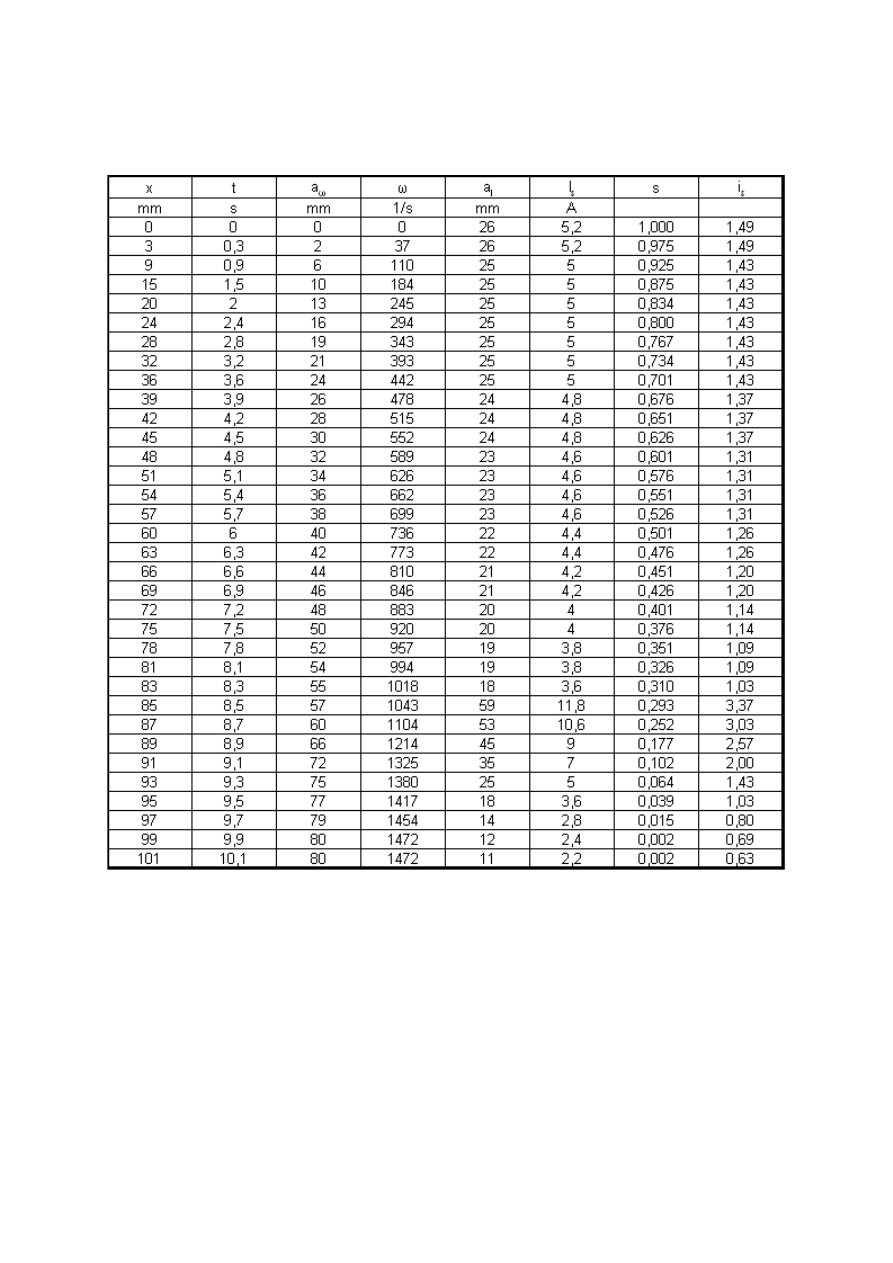
Tabela 2: Tabela pomiarów i obliczeń dla przełącznika gwiazda – trójkąt
W przełączniku gwiazda/trójkąt widać wyraźnie dwa etapy rozpędzania silnika. Na początku,
przy połączeniu w gwiazdę natężenie prądu jest bardzo niskie, jednak w momencie przełączenia w
trójkąt wydać wyrażny krótki skok natężenia.
3. Rozruch RD włączany symetrycznie
Wykres 2: Charakterystyki przełącznika gwiazda-trójkąt
0
20
40
60
80
100
120
0
200
400
600
800
1000
1200
1400
1600
0
2
4
6
8
10
12
14
t,s
ω
, 1
/s
I,
A
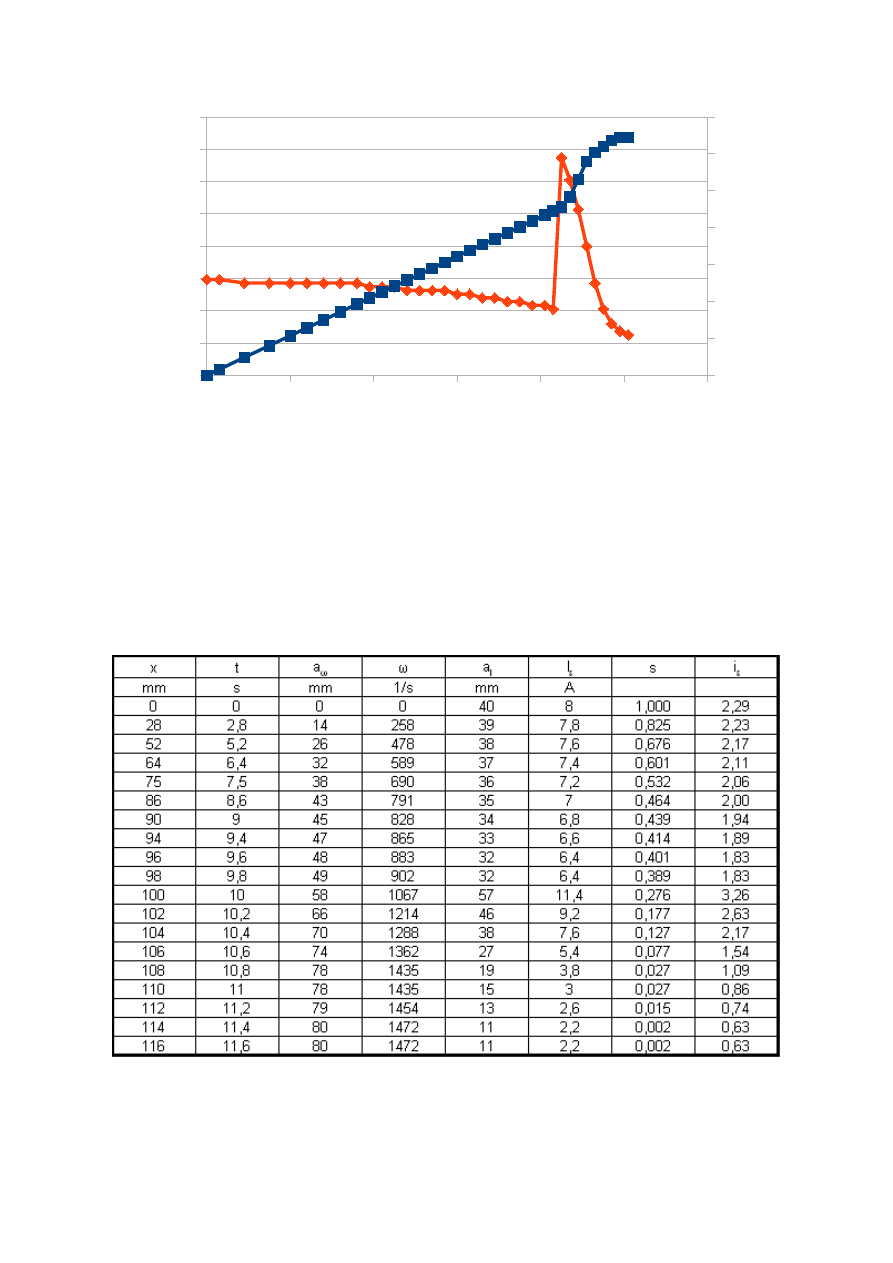
Tabela 3: Wyniki pomiarów i obliczeń dla rozrychu RD włączanego symetrycznie
W rozruchu RD włączanym symetrycznie widać wyraźnie dwa etapy rozpędzania silnika,
podobnie ja w przełączniku gwiazda/trójkąt. W rozruchu RD czas załączania i całkowite natężenie
jest wyższe niż w przełączniku gwiazda/trójkąt, jednak natężenie skokowe przy przełączaniu jest
niższe.
4. Rozruch RD włączany symetrycznie
Wykres 4: Charakterystyki rozruchu RD włączanego symetrycznie
0
2
4
6
8
10
12
14
0
200
400
600
800
1000
1200
1400
1600
0
2
4
6
8
10
12
t, s
ω
, 1
/s
I,
A
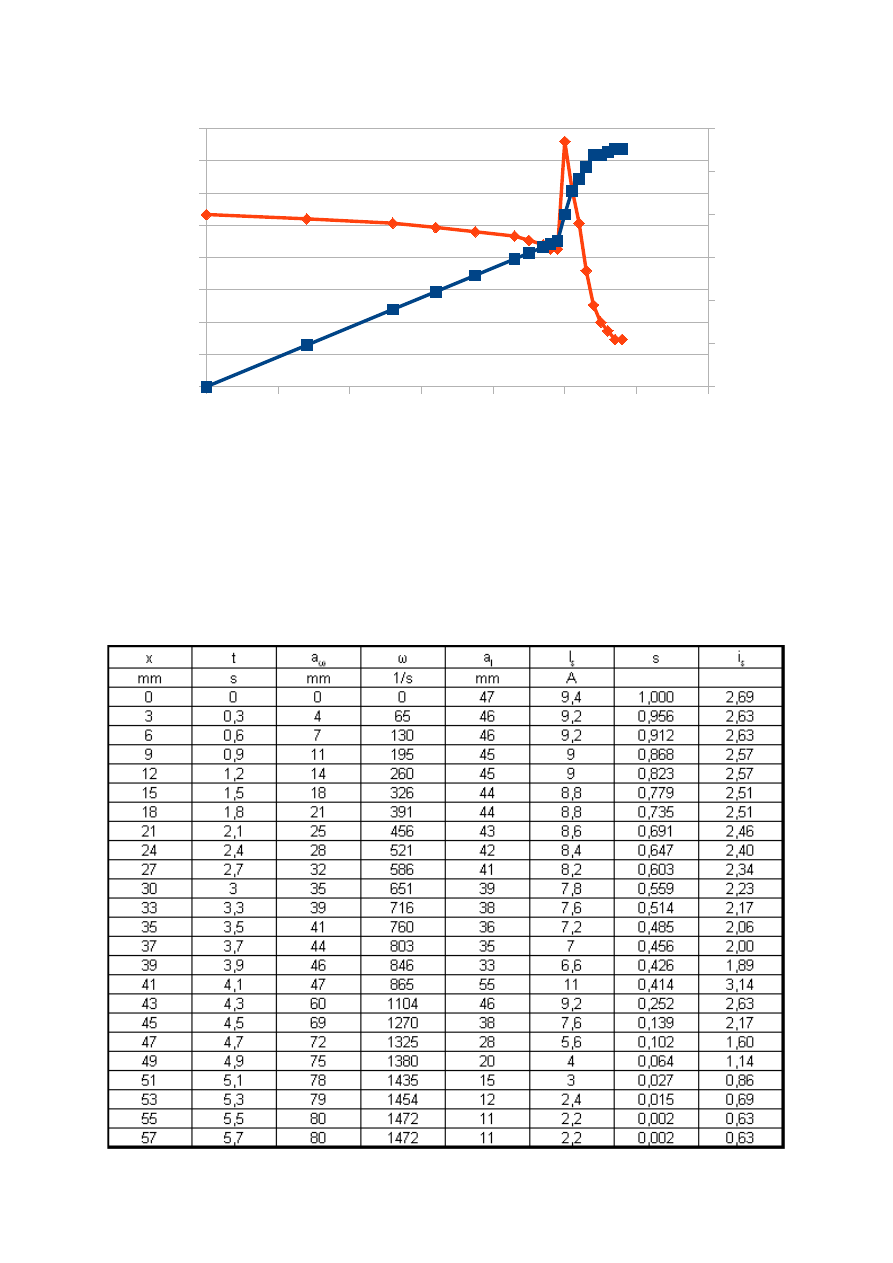
Tabela 3: Wyniki pomiarów i obliczeń dla rozruchu RD włączanego niesymetrycznie
W rozruchu RD włączanym niesymetrycznie wyraźnie widać dwa etapy rozruchu silnika. W
przeciwieństwie do rozrusznika stojanowego stosowanego symetrycznie, tutaj rozruch jest znacznie
szybszy, jednak wiąże się to z większym prądem na początku rozruchu.
Wykres 5: Charakterystyki dla rozruchu RD włączenego niesymetrycznie
0
1
2
3
4
5
6
0
200
400
600
800
1000
1200
1400
1600
0
2
4
6
8
10
12
t, s
ω
, 1
/s
I,
A
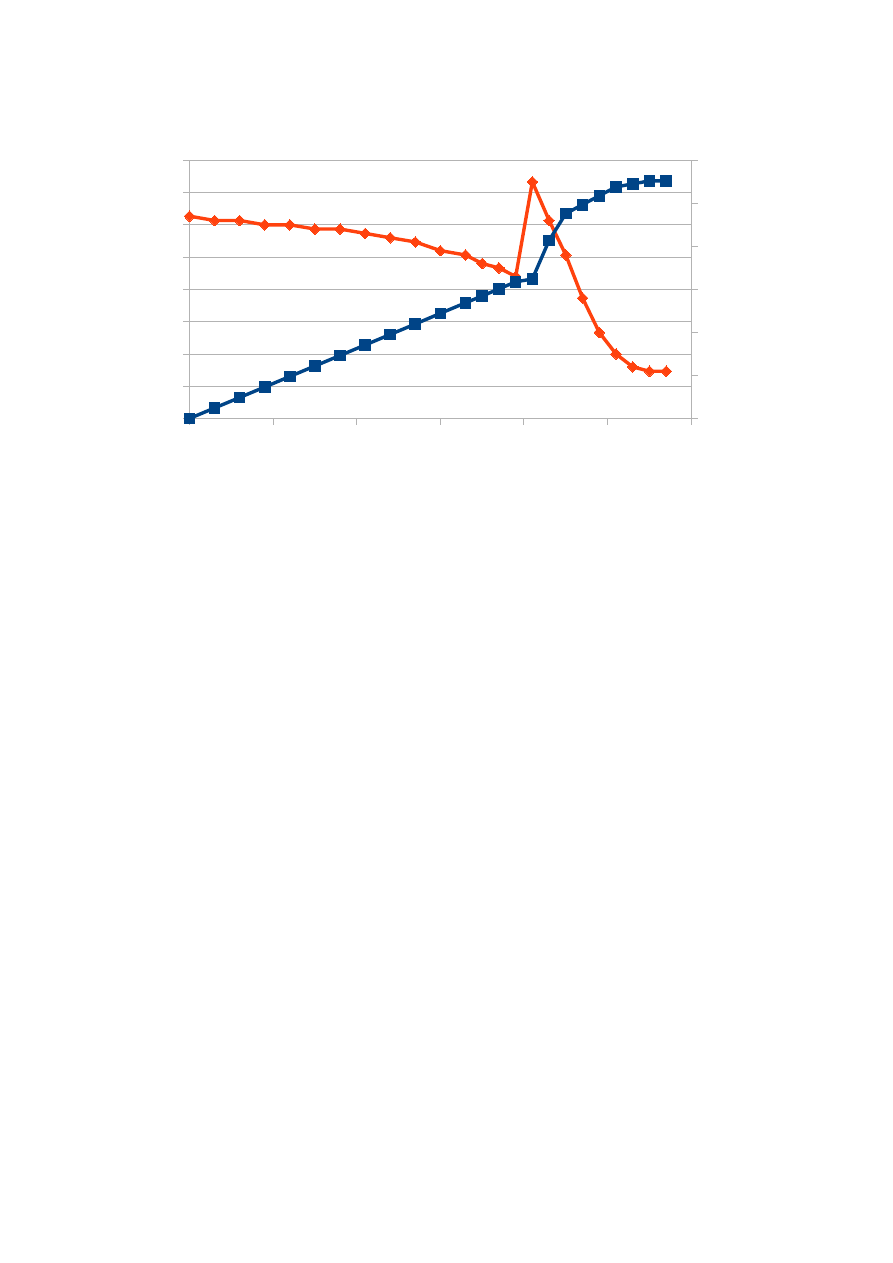
5. Soft-start
Tabela 4: Wyniki pomiarów i obliczeń dla rozruchu przy pomocy soft-startu
Rozruch soft start przebiega łagodnie. Nie występują w nim gwałtowne skoki prądu. Jest od także
dość szybki.
5. Wykres porównawczy
Wykres 6: Charakterystki rozruchu soft-start
0
1
2
3
4
5
6
7
8
9
0
200
400
600
800
1000
1200
1400
1600
0
2
4
6
8
10
12
14
t, s
ω
, 1
/s
I,
A
Wykres 7: Wykres porównujące różne metody silnika klatkowego
0
2
4
6
8
10
12
14
0
5
10
15
20
25
t, s
I,
A

6. Wnioski
Najdłuższy czas rozruchu ma rozrusznik stojanowy załączany symetrycznie. Najszybszy jest zaś
rozruch bezpośredni.
W rozruchu bezpośrednim, połączeniu gwiazda/trókąt oraz rozruchu RD występują wyraźne
skokowe wzrosty natężenia, które mogą powodować uszkodzenia elementów silnika. Jest to bardzo
niezalecane, szczególnie przy urządzeniach często włączanych i wyłączanych.
Rozruch soft start ma bardzo ładodny przebieg i przez długi czas ma wysoki współczynnik
poślizgu, by potem zaczął gwałtowniej rosnąć. Oznacza to, że silnik zwiększa swoją prędkość
obrotową powoli, nie powodując przeciążeń sieci i uszkodzeń elementów silnika.
Każda z metod ma swoje zalety i wady. Dobór metody dopasować do zastosowań danego silnika
klatkowego i warunków w jakich ma pracować, szczególnie ilość włączeń w danym okresie czasu.
Wyszukiwarka
Podobne podstrony:
OPCJE NA INDEKS WIG 20 id 33601 Nieznany
3 20 id 32892 Nieznany (2)
IMG 20 id 211225 Nieznany
Exper 20 id 166814 Nieznany
dodawanie do 20 9 id 138954 Nieznany
instrukcja cw 20 id 216489 Nieznany
IMG 20 id 211182 Nieznany
IMG 20 id 211145 Nieznany
Nowy Dokument 20 id 323651 Nieznany
I 20 id 208103 Nieznany
20 id 367371 Nieznany (2)
ENT 19 20 id 161991 Nieznany
A, TEST 20 id 49154 Nieznany (2)
6 20 id 43142 Nieznany (2)
mat fiz 2006 03 20 id 282353 Nieznany
więcej podobnych podstron