
Informatyka I – Lab 09, r.a. 2011/2012
prow. Sławomir Czarnecki
Zadania na laboratorium nr. 9
Po utworzeniu nowego projektu, dołącz bibliotekę
bibs.h
.
1. Zadanie problemowe z równań różniczkowych zwyczajnych – wstęp.
Algorytm Runge-Kutta rozwiązywania układu dwóch równań różniczkowych zwyczajnych
pierwszego rzędu:
( )
( ) ( )
( )
( ) ( )
'
,
,
,
'
,
,
u x
f x u x v x
v x
g x u x v x
=
=
z dwoma znanymi funkcjami
(
)
(
)
3
3
:
;
, ,
,
:
;
, ,
f R
R f
f x u v
g R
R g
g x u v
→
=
→
=
oraz z dwoma nieznanymi i poszukiwanymi funkcjami
( )
( )
,
u
u x
v
v x
=
=
które spełniać mają warunki początkowe
( )
( )
0
0
0
0
,
u x
u
v x
v
=
= .
Dane wejściowe i parametry algorytmu
• punkt początkowy (chwila początkowa x = x
0
):
x
0
• warunek początkowy dla funkcji u = u(x):
u
0
• warunek początkowy dla funkcji v = v(x):
v
0
• długość kroku (czasowego):
θ
• liczba dyskretnych punktów (liczba chwil czasowych)
n
w których obliczane będą wartości funkcji:
u = u(i ·
θ
) , v = v(i ·
θ
) (i = 0,1,...,n – 1)
• wskaźnik do funkcji typu
double
f (
double
,
double
,
double
):
*f
• wskaźnik do funkcji typu
double
g (
double
,
double
,
double
):
*g
• wektor punktów, w których obliczamy numerycznie rozwiązanie:
X[n]
• wektor wartości funkcji u = u(x):
U[n]
• wektor wartości funkcji v = v(x):
V[n]
Algorytm Runge-Kutta – pseudo-kod
1.
zainicjalizuj pierwsze składowe:
X[0] = x0
U[0] = u0
V[0] = v0
2
. dla każdej chwili czasowej
(
)
0
1
i
i
n
≤ < − , obliczaj
{
F =
θ
· f (X[i] , U[i] , V[i])
G =
θ
· g (X[i] , U[i] , V[i])
dU =
θ
· f (X[i] + 0.5
θ
, U[i] + 0.5 F , V[i] + 0.5 G)
dV =
θ
· g (X[i] + 0.5
θ
, U[i] + 0.5 F , V[i] + 0.5 G)
X[ i + 1 ] = X[i] +
θ
U[ i + 1 ] = U[i] + dU
V[ i + 1 ] = V[i] + dV
}
Na podstawie powyższego algorytmu, zdefiniuj funkcję
void
runge_kutta(
double
x0 ,
double
u0 ,
double
v0 ,
double
θ
,
int
n,
double
(*f )(
double
x ,
double
u ,
double
v),
double
(*g)(
double
x ,
double
u ,
double
v),
double
* X ,
double
* U ,
double
* V )
i znajdź następnie rozwiązanie numeryczne
( )
u
u t
=
,
( )
v
v t
=
układu dwóch równań
różniczkowych zwyczajnych:
'
3
'
4
u
u v
v
u v
=
−
=
−
z warunkami początkowymi
( )
( )
0
0.2
0
0.5
u
v
=
=
w przedziale
[
]
0 , 2
T =
wywołując funkcję runge_kutta(…) dla kroku czasowego
0.05
θ
=
.
Sprawdź poprawność rozwiązania numerycznego, konfrontując otrzymane wartości dyskretne
funkcji
( )
( )
,
u
u t
v
v t
=
=
z wartościami dyskretnymi, znanego w tym przypadku,
rozwiązania analitycznego:
( )
5
10
t
t
e
t e
u t
=
−
,
( )
2
5
t
t
e
t e
v t
=
−
.
Sporządź wykres (np. w Excel) funkcji wektorowej
( )( )
( ) ( )
2
,
,
T
u v t
u t v t
=
∈
ℝ , który
powinien wyglądać tak jak na zamieszczonym poniżej rysunku rys.1.
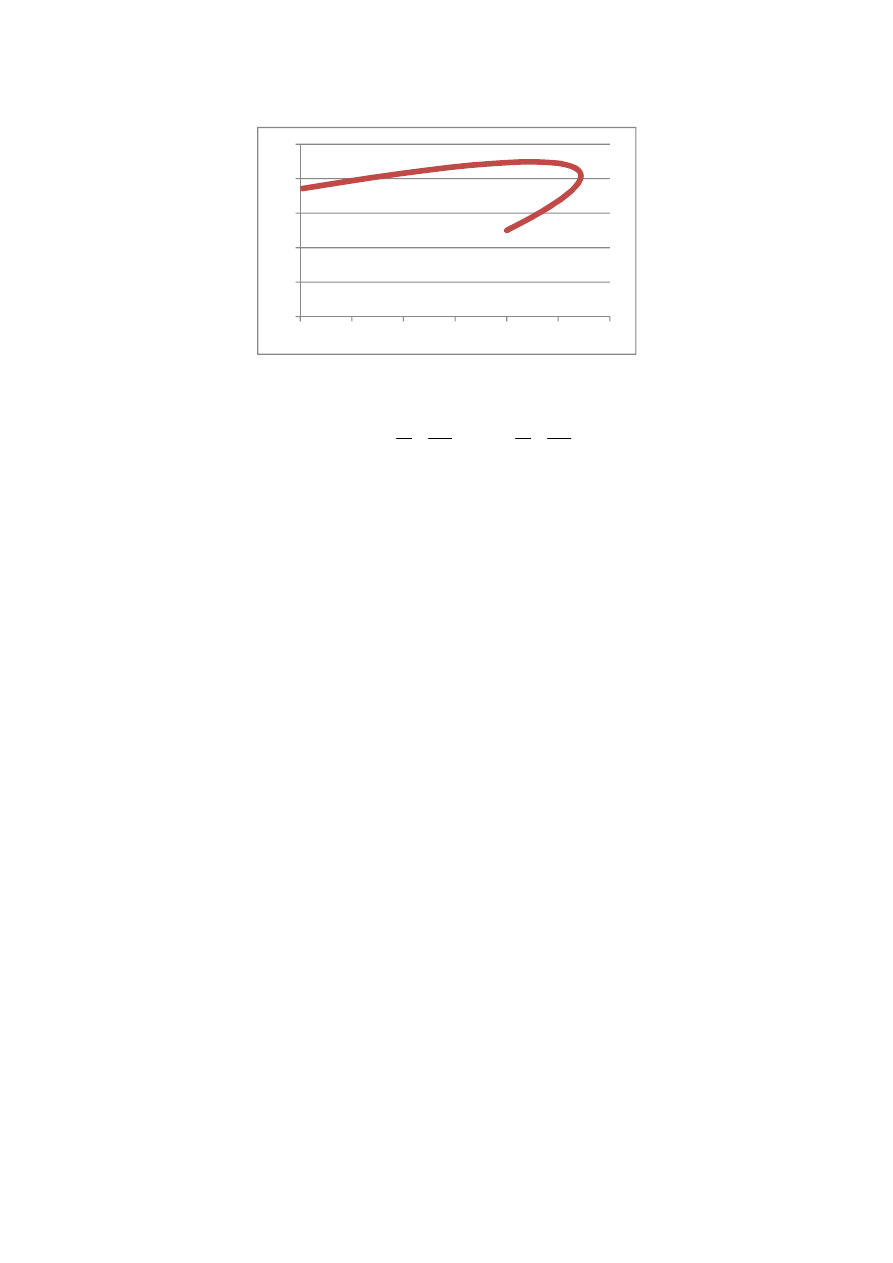
Rys.1. Wykres funkcji wektorowej
( )( )
( ) ( )
2
,
,
T
u v t
u t v t
=
∈
ℝ
dla
( )
5
10
t
t
e
t e
u t
=
−
,
( )
2
5
t
t
e
t e
v t
=
−
Algorytm poszukiwania rozwiązania równania różniczkowego zwyczajnego
rzędu drugiego
Zadanie numerycznego rozwiązania równania różniczkowego zwyczajnego drugiego rzędu
( )
( ) ( )
"
,
, '
y
x
h x y x
y x
=
ze znaną funkcją
3
:
h R
R
→
oraz nieznaną i poszukiwaną funkcją
:
y R
R
→
spełniającą warunki początkowe
( )
( )
0
0
0
0
, '
y x
y
y x
v
=
=
gdzie
0
0
0
,
,
x
y
v są znanymi wartościami, można z reguły odpowiednio przedefiniować w
terminach zadania rozwiązywania układu dwóch równań różniczkowych zwyczajnych (
x
0
jest
najczęściej początkową chwilą czasu,
y
0
jest najczęściej wartością współrzędnej uogólnionej
Lagrange’a definiującej położenie punktu materialnego lub układu materialnego o jednym
stopniu swobody w chwili początkowej
x
0
, natomiast
v
0
jest wtedy prędkością uogólnioną w
chwili początkowej
x
0
).
0
0.2
0.4
0.6
0.8
1
0
0.05
0.1
0.15
0.2
0.25
0.3
Algorytm
• zdefiniuj funkcję
3
:
f R
R
→ ,
(
)
, ,
f x u v
v
=
oraz funkcję
3
:
g R
R
→ ,
(
)
(
)
, ,
, ,
g x u v
h x u v
=
gdzie
u i v są odpowiednio wartościami funkcji:
( )
( )
:
,
u R
R
u x
y x
→
=
i
( )
( )
:
,
'
v R
R
v x
y x
→
=
• Znajdź rozwiązania
( )
u
u x
=
i
( )
v
v x
=
układu dwóch równań różniczkowych
zwyczajnych pierwszego rzędu
( )
( ) ( )
( )
( ) ( )
'
,
,
'
,
,
u x
f x u x v x
v x
g x u x v x
=
=
przy warunkach początkowych
( )
( )
0
0
0
0
,
u x
y
v x
v
=
=
wykorzystując na przykład opisany powyżej algorytm Runge-Kutta.
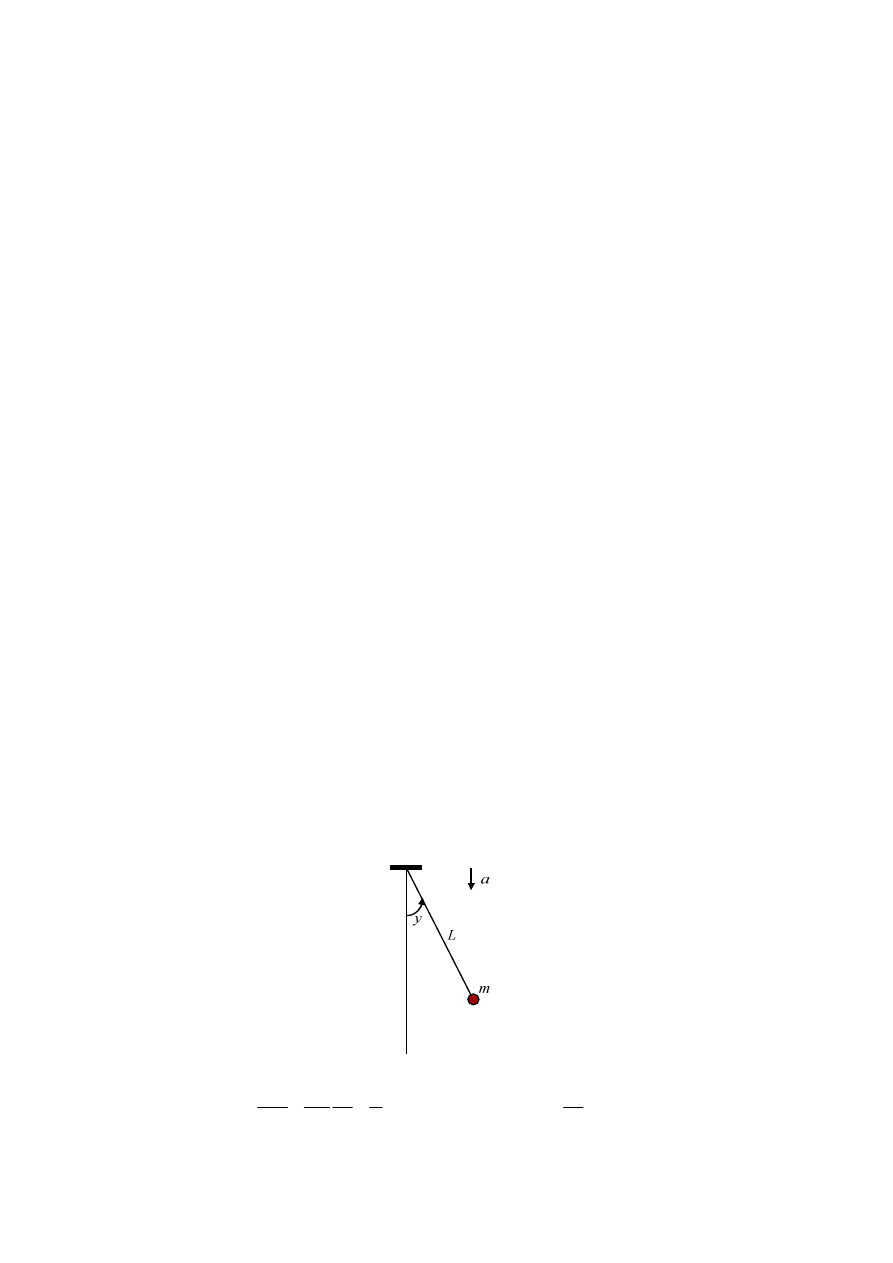
Zadanie problemowe – wahadło matematyczne
Rozważmy równanie różniczkowe ruchu wahadłowego punktu materialnego o masie
m,
poruszającego się na końcu nieważkiej linki o długości
L, w polu grawitacyjnym ziemi
(
a = 9.81 [m/s
2
]). Zakładamy dodatkowo, że istnieje siła tłumienia ruchu, która jest
proporcjonalna do prędkości kątowej ruchu linki. Współczynnik tłumienia oznaczmy przez
c.
Przemieszczenie punktu w każdej chwili czasu
t określa kąt y = y(t). Prędkością kątową ruchu
obrotowego linki będzie zatem
y’ = y’(t).
( )
( )
( )
2
0
2
sin
0,
0
,
0
0
d y
c dy
a
dy
y
y
dt
mL dt
L
dt
ϕ
+
+
=
=
=
Równanie różniczkowe zapiszemy w postaci
( )
2
2
sin
d y
a
c dy
y
dt
L
mL dt
= −
−
i definiujemy funkcje
(
)
3
:
;
, ,
f R
R f t u v
v
→
=
(
)
( )
3
:
;
, ,
sin
a
c
g R
R g t u v
u
v
L
mL
→
= −
−
Ponadto załóżmy, że
a = 9.81[m/s
2
] ,
m = 1.0 [kg] , L = 10.0 [m] , c = 3.0 [N s]
chwila początkowa:
0
0
t
=
warunek początkowy dla funkcji
u = u(t):
0
2
u
π
=
,
tj.
( )
0
0
2
y t
π
ϕ
=
=
warunek początkowy dla funkcji
v = v(t):
0
0
v
= ,
tj.
( )
0
0
dy
t
dt
=
długość kroku (czasowego):
θ
= 0.001
liczba chwil czasowych:
n = 30000
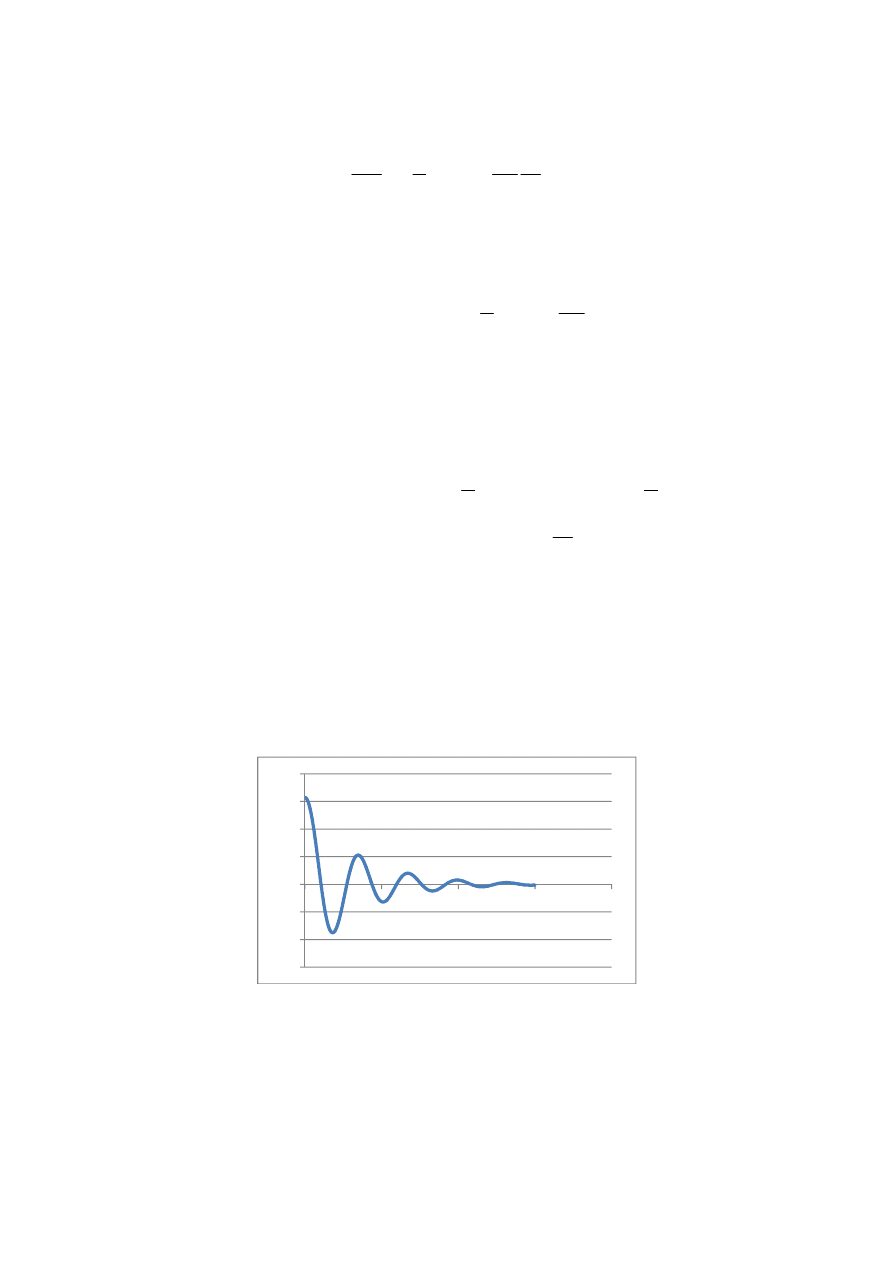
Znajdź rozwiązanie numeryczne
( )
y
y t
=
wywołując funkcję
Runge_Kutta(…), której
wykres jest pokazany na rys.2.
Rys. 2. Wykres funkcji
( )
y
y t
=
dla wahadła matematycznego.
-1.5
-1
-0.5
0
0.5
1
1.5
2
0
10
20
30
40
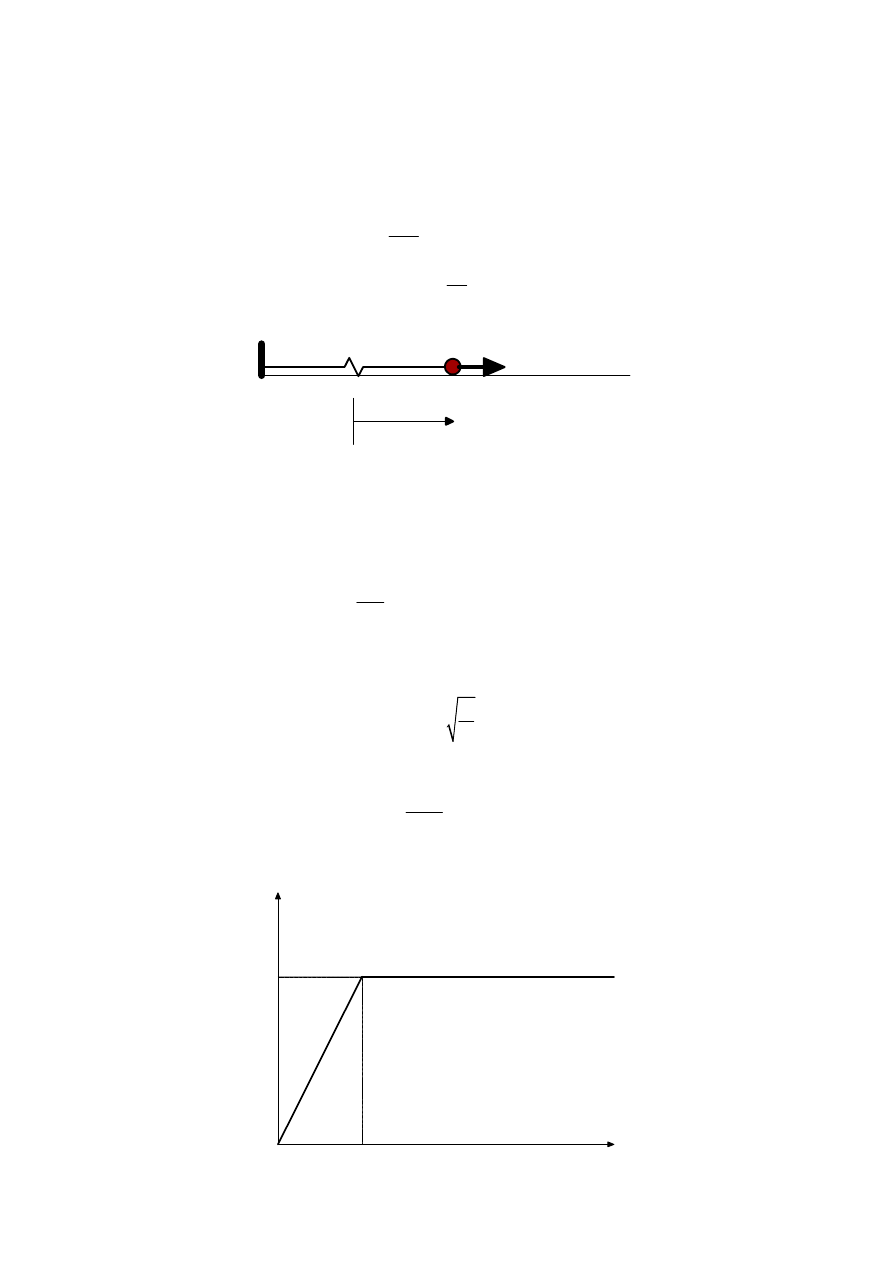
Zadanie problemowe - oscylator harmoniczny
Rozważmy równanie różniczkowe ruchu punktu materialnego o masie
m, z warunkami
początkowymi na przemieszczenie
y = y(t) i prędkość y’ = y’(t)
( )
( )
( )
2
2
0
0 ,
0
0
d y
m
ky
F t
dt
dy
y
dt
+
=
=
=
F = F(t)
y = y(t)
k
m
Umieszczony na końcu sprężyny o stałej
k punkt ma masę m. Do punktu materialnego
przyłożona jest, zależna tylko od czasu
τ
, siła
F = F(
τ
). Pomijamy tarcie pomiędzy punktem a
podłożem.
Nietrudno wykazać, że całka ogólna tego równania (jego rozwiązanie) dana jest wzorem
( )
(
) ( )
0
1
sin
,
0
t
y
y t
t
F
d
t
m
ω ωτ
τ τ
ω
=
=
−
≥
∫
.
gdzie zdefiniowano nową wielkość, tzw. częstość kołową drgań
k
m
ω
=
Dla siły
F = F(t) danej wzorem
( )
[
]
0,
const
const
const
const
const
F
t
t
F
F
t
τ τ
τ
τ
∈
=
≥
t
const
F
const
F(
<
)
<
całkę ogólną równania różniczkowego możemy przedstawić w postaci następującego wzoru:
( )
( )
[
]
(
)
( )
sin
1
0,
1
1
sin
sin
const
const
STAT
const
const
const
t
t
t
t
t
y t
y
t
t
t
t
t
t
ω
ω
ω ω
ω
ω
−
∈
=
+
−
−
≥
gdzie
2
const
const
STAT
F
F
y
k
m
ω
=
=
jest rozwiązaniem statycznym równania różniczkowego, dla stałego w czasie obciążenia
F
const
.
W celu sprawdzenia skuteczności algorytmu Runge-Kutta rozwiązywania układu dwóch
równań różniczkowych zwyczajnych, dopasujmy najpierw oznaczenia i zdefiniujmy
poprawnie wszystkie funkcje, które są parametrami naszej procedury. Najpierw równanie
( )
2
2
d y
m
ky
F t
dt
+
=
zapiszmy w postaci
( )
2
2
F t
ky
d y
dt
m
−
=
i zgodnie z podanymi wzorami oraz po uwzględnieniu faktu, że rolę zmiennej
x, odgrywa
teraz parametr
t, mamy następujące definicje funkcji f i g:
(
)
3
:
;
, ,
f R
R f t u v
v
→
=
(
)
(
)
3
:
;
, ,
, ,
g R
R g t u v
h t u v
→
=
gdzie dla zdefiniowanej wcześniej funkcji
F = F(t)
(
)
( )
, ,
F t
ku
h t u v
m
−
=
Wartości pozostałych parametrów są następujące:
chwila początkowa:
x
0
= 0
warunek początkowy dla funkcji
u = u(t):
u
0
= 0
warunek początkowy dla funkcji
v = v(t):
v
0
= 0
długość kroku (czasowego):
θ
= 0.001
liczba chwil czasowych
n,
n = 500 ÷ 2000
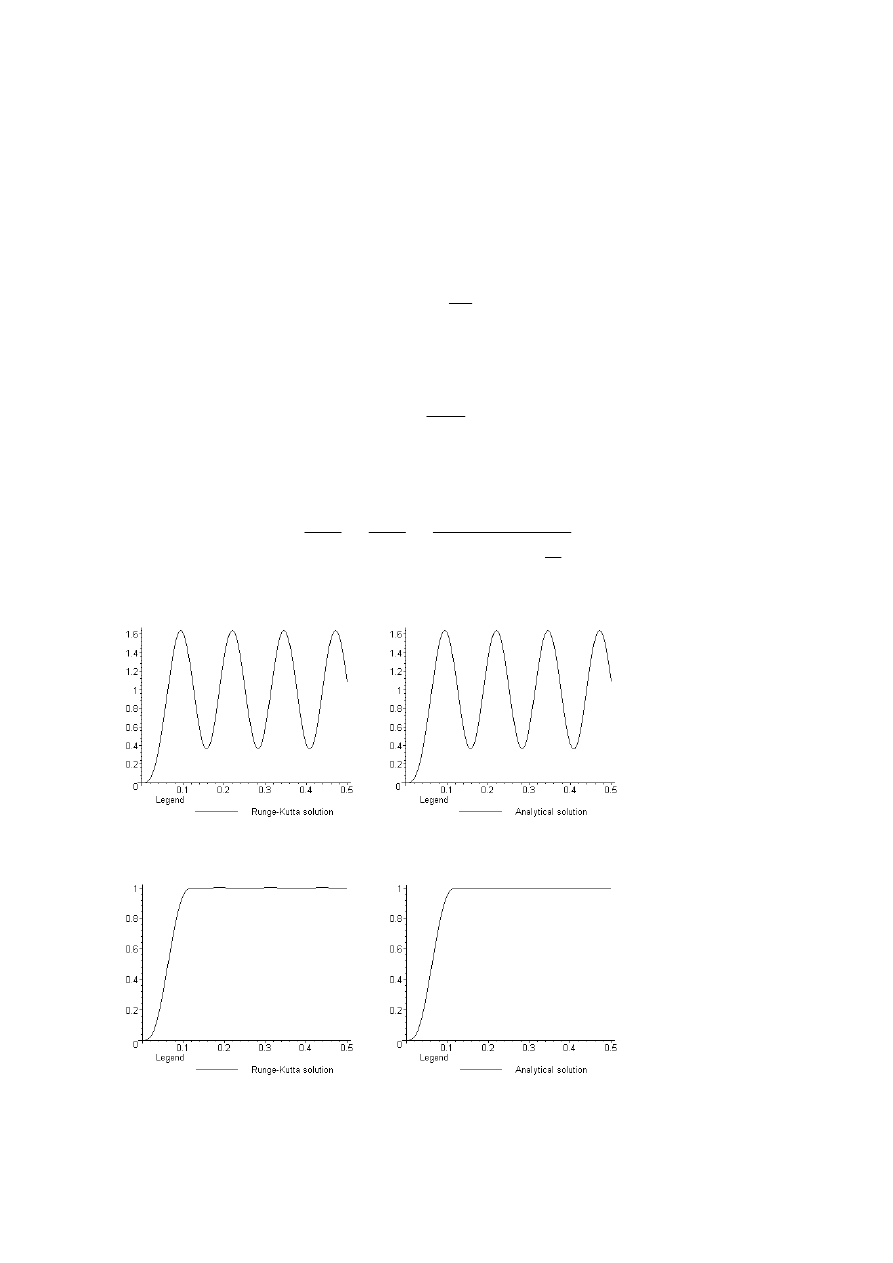
Dla przyjętych danych, przeprowadź symulację numerycznego rozwiązania naszego równania
oscylatora, dla kilku różnych wartości chwili czasowej
t
const
charakteryzującej moment, w
którym narastająca liniowo siła
F = F(t) osiąga stałą wartość F
const
= 1000.0 [N]. Przyjmij
ponadto stałą sprężyny
k = m ·
ω
2
dla
m = 1.0 [kg] i
ω
= 50.0 [1/s]. Chwilę czasową
t
const
zdefiniuj następująco:
const
t
T
ξ
= ⋅
gdzie
2
T
π
ω
=
natomiast
ξ
jest dowolną, ale ustaloną liczbą dodatnią. Wykresy sporządź nie dla funkcji
y =
y(t), ale dla ilorazu
( )
STAT
y t
y
gdzie
[ ]
[ ]
2
2
2
1000.0 N
0.4[m]
1
1.0 kg 50.0
s
const
const
STAT
F
F
y
k
m
ω
=
=
=
=
⋅
.
Przypadek 1 (
θ
= 0.001,
ξ
= 0.5,
n = 500)
Przypadek 2 (
θ
= 0.001,
ξ
= 1.0 ,
n = 500)
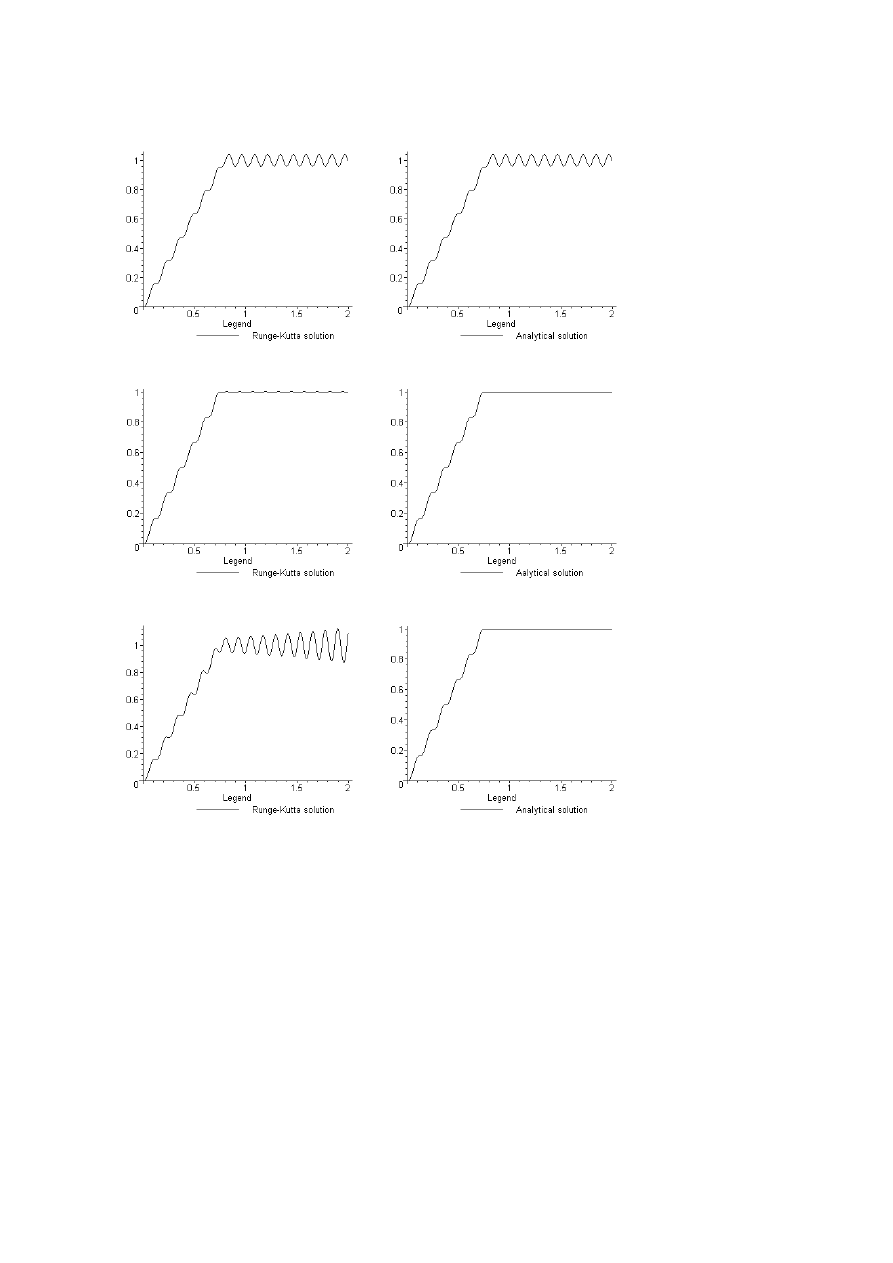
Przypadek 3 (
θ
= 0.001,
ξ
= 6.3 ,
n = 2000)
Przypadek 4 (
θ
= 0.001,
ξ
= 6.0 ,
n = 2000)
Przypadek 5 (
θ
= 0.01
,
ξ
= 6.0 ,
n = 200)
W przykładzie tym widzimy, jak przyjęcie zbyt dużego kroku czasowego
θθθθ
powoduje na
tyle znaczące pogorszenie dokładności rozwiązania numerycznego, że w praktyce nie
mogłoby być ono zaakceptowane.
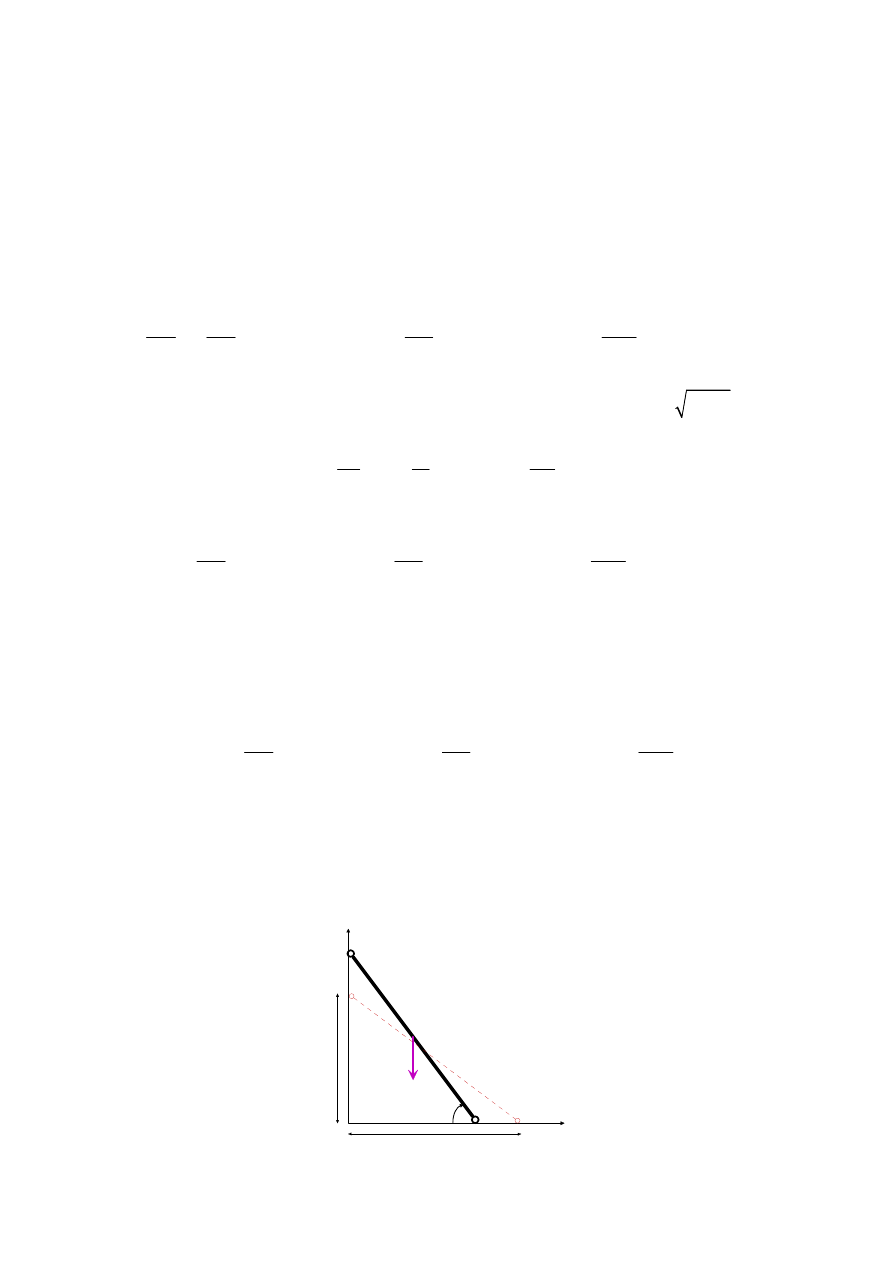
Zadanie problemowe – drgania pręta
Jednorodny pręt
AB o masie m jest obciążony w środku geometrycznym dodatkową pionową
siłą
( )
Q
Q t
=
. Końce
A i B mogą przemieszczać się bez poślizgu odpowiednio wzdłuż osi y i
x. Punkty O, A oraz O, B połączone są odpowiednio pionową sprężyną o stałej k
y
i poziomą
sprężyną o stałej
k
x
, których długości w stanie naturalnym (nierozciągniętym) wynoszą
odpowiednio
l
y
,
l
x
. Przyjmując kąt
( )
t
φ φ
=
jako współrzędną uogólnioną Lagrange’a,
wyprowadź równanie różniczkowe ruchu pręta z równania Lagrange’a II-go rodzaju:
( )
( )
( )
( )
( )
2
2
3
3
3
sin
cos
cos
sin
cos
2
y
x
y
x
k
k
d
l
l
l
l
P
dt
m l
m l
m l
φ
φ
φ
φ
φ
φ
= −
−
−
−
−
(
•)
gdzie
( )
( )
P
P t
G
Q t
=
= +
(
G
m g
=
,
g oznacza przyśpieszenie ziemskie),
2
2
x
y
l
l
l
=
+
.
Dopasowując się do oznaczeń argumentów i funkcji przyjętych w opisanych powyżej
algorytmach:
t
x
= ,
u
φ
=
,
d
v
dt
φ
=
,
( ) ( )
...
... '
d
dt
=
,
( ) ( )
2
2
...
... "
d
dt
=
ostateczna postać
równania różniczkowego (
•) będzie zatem następująca:
( )
( )
( )
( )
( )
3
3
3
''
sin
cos
cos
sin
cos
2
y
x
y
x
k
k
u
l
u
l
u
l
l
u
u
P
u
m l
m l
m l
= −
−
−
−
−
(
••)
która z kolei jest równoważna układowi dwóch równań różniczkowych zwyczajnych
(
)
'
'
, ,
u
v
v
h x u v
=
=
gdzie
(
)
( )
( )
( )
( )
( )
3
3
3
, ,
sin
cos
cos
sin
cos
2
y
x
y
x
k
k
h x u v
l
u
l
u
l
l
u
u
P
u
m l
m l
m l
= −
−
−
−
−
.
Znajdź numeryczne rozwiązanie równania różniczkowego funkcją
Runge_Kutta(...) dla
następujących danych:
(
)
(
)
(
)
0
0
0
0 ,
0.12435499454676195 ,
0 ,
0.003 ,
31999
, ,
,
, ,
, ,
1.0 ,
2.0 ,
2.0 ,
4.0 ,
3.0 ,
10.0
x
y
x
y
x
u
v
n
f x u v
v g x u v
h x u v
m
k
k
l
l
g
θ
=
=
=
=
=
=
=
=
=
=
=
=
=
x
y
P
k
y
k
x
l
x
l
y
φ
Α
Β
Ο
Siłę
(
)
Q
Q t
x
=
=
zdefiniuj na cztery sposoby:
I przypadek:
- G
t
Q
t
0
II przypadek:
G
t
Q
t
0
III przypadek:
( )
0
Q t
const
= =
IV przypadek:
( )
(
)
sin 0.1
Q t
G
t
=
⋅
gdzie
0
60
t =
.
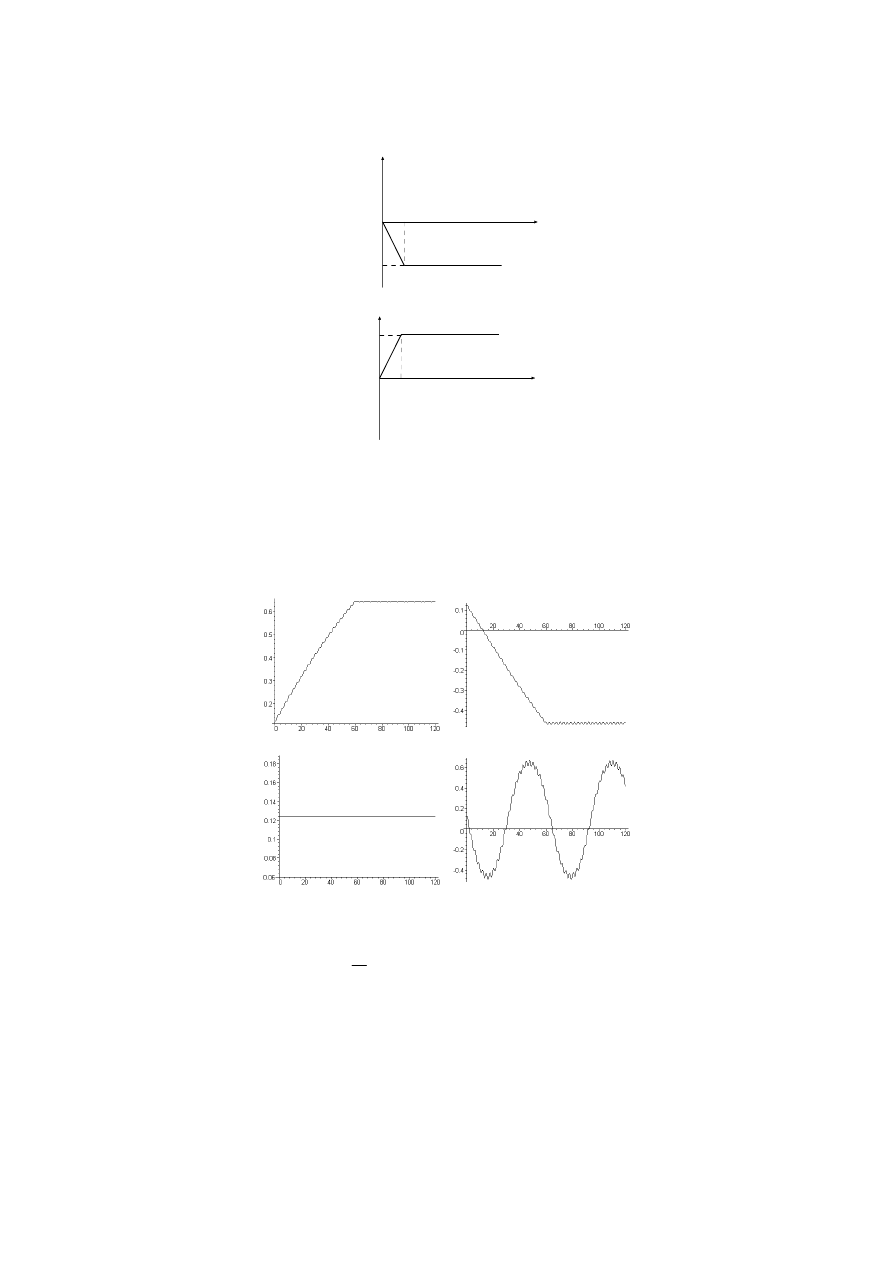
Wartości składowych wektorów
[
]
1
x n +
,
[
]
1
U n +
zapisz do pliku tekstowego i porównaj
wczytane wartości z tymi podanymi na poniższych rysunkach.
Zależność kąta
( )
t
φ φ
=
kolejno dla I, II, III i IV przypadku
Kąt
[
]
0.643501
arctan
y
x
l
rad
l
φ
≈
=
definiuje położenie równowagi pręta dla przypadku
0
P
= (położenie w którym sprężyny są w stanie naturalnym).
Kąt
[
]
0.463648 rad
φ
≈ −
definiuje położenie równowagi pręta dla przypadku
2
P
G
=
.
Kąt
[
]
0.124355 rad
φ
≈
definiuje położenie równowagi pręta dla przypadku P
G
=
.
Wyszukiwarka
Podobne podstrony:
Lab 09 2011 2012
Lab 02 2011 2012
Lab 06 2011 2012
Lab 06 2011 2012 NWD
Lab 10 2011 2012
Lab 05 2011 2012
Lab 04 2011 2012
Lab 03 2011 2012
Lab 03 2011 2012
Lab 08 2011 2012
Lab 07 2011 2012 Suplement
Lab 02 2011 2012
Lab 06 2011 2012
Lab 06 2011 2012 NWD
więcej podobnych podstron