
ZASTOSOWANIE SIECI
NEURONOWYCH
W ROBOTYCE

Mózg
-
ok. 100 mld neuronów połączonych w sieć,
- objętość 1400 cm
3.
- powierzchnia 2000 cm
2.
- liczba neuronów ok. 10
11
(100 mld),
- liczba połączeń między neuronami: 10
15,
- średni dystans połączenia: 0,01 mm – 1 m,
- impulsy: częstotliwość 1-100 Hz, czas trwania 1-2 ms,
- szybkość pracy mózgu: 10
18
operacji/s.
Charakterystyka:
• proste jednostki przetwarzające – neurony podobne do siebie,
• tworzą one układ rozproszony – sieć neuronową
• funkcjonowanie sieci: przetwarzanie sygnałów elektrochemicznych.۰
• przetwarzanie informacji – obliczenia dokonywane w sposób równoległy
(wiele neuronów
pracuje równocześnie),
• wiedza – zawarta niejawnie w strukturze połączeń między neuronami,
• o tym, jaka reprezentacja środowiska zewnętrznego jest zapisana
decyduje:
- sposób połączeń (które jednostki są ze sobą połączone),
- siła połączeń (wagi).
Cechy mózgu ludzkiego pożądane w sztucznych systemach, które przysługują
sieciom neuronowym:
۰ odporność na uszkodzenia,
۰ elastyczność – „uczenie się”,
۰ zdolność radzenia sobie z informacją zaszumioną, losową lub niespójną,
۰ równoległość działania.
W rzeczywistości komórka nerwowa posiada kilka tysięcy
dendrytów, a z innymi neuronami kontaktuje się poprzez miliony połączeń.
Powierzchnia neuronu nie jest zwykłą gładką błoną. Znajduje się na niej około
miliona
tzw.
sodowo-potasowych
pomp
adenozyno-trójfosfatazowych,
odpowiedzialnych za utrzymaniu na wewnętrznej stronie błony potencjału -70
mV względem otoczenia. Odbywa się to poprzez “wypompowywanie” jonów
sodu z wnętrza komórki, a wpuszczanie jonów potasu. Proces ten musi
przebiegać ciągle, gdyż błona komórkowa jest nieszczelna i nie zapobiega
zjawisku
odwrotnemu
prowadzącemu
do
zniwelowania
tej
różnicy
potencjałów.
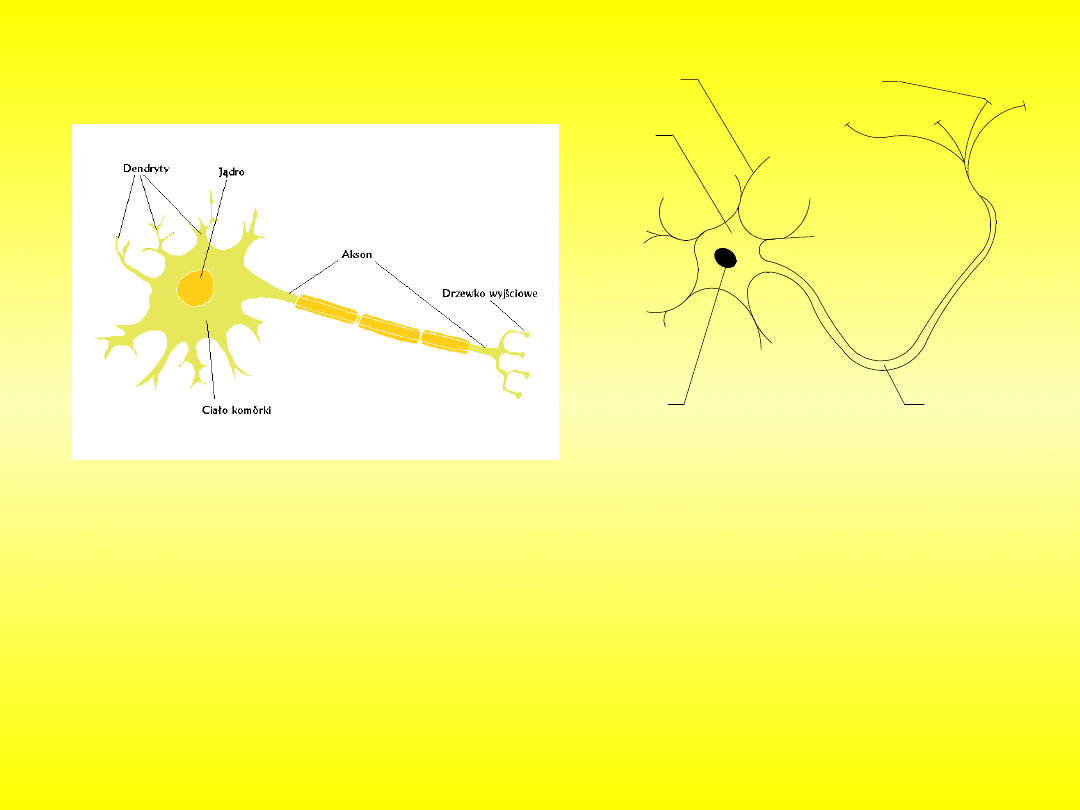
Naturalny neuron
2
3
1
4
5
Rys. Uproszczony schemat budowy
neuronu: 1-cytoplazma komórki, 2-
jądro komórkowe, 3-akson, 4-dendryt,
5-synapsa
Bodziec dostarczony do komórki powoduje zmianę jej stanu
elektrycznego przebiegającą następnie wzdłuż aksonu. Dzieje się to jednak nie na
drodze przewodnictwa elektrycznego, a poprzez ekspansję lokalnych zmian stanu
elektrycznego błony komórkowej. Zmiany potencjału błony są skutkiem jej
zmiennej przepuszczalności dla jonów sodowych i potasowych. Po przejściu
impulsu błona powraca do normalnego stanu. Dojście impulsu do synapsy
(połączenia akson-dendryt lub dendryt z inną komórką) powoduje uwolnienie z
komórki pobudzającej neurotransmitera, który z kolei jest przyczyną pobudzenia
komórki odbierającej impuls. Neurotransmiter to związek chemiczny przekazujący
informację między neuronami. Pobudzenie neuronu odbierającego sygnał jest tym
większe, im więcej neurotransmitera wydzieli się z kolbki synaptycznej komórki
pobudzającej. Łączne pobudzenie komórki nerwowej jest sumą pobudzeń na
wszystkich połączeniach synaptycznych. Fakt ten ma bardzo duże znaczenie przy
tworzeniu modelu neuronu, i jest podstawą teorii sztucznych sieci neuronowych.
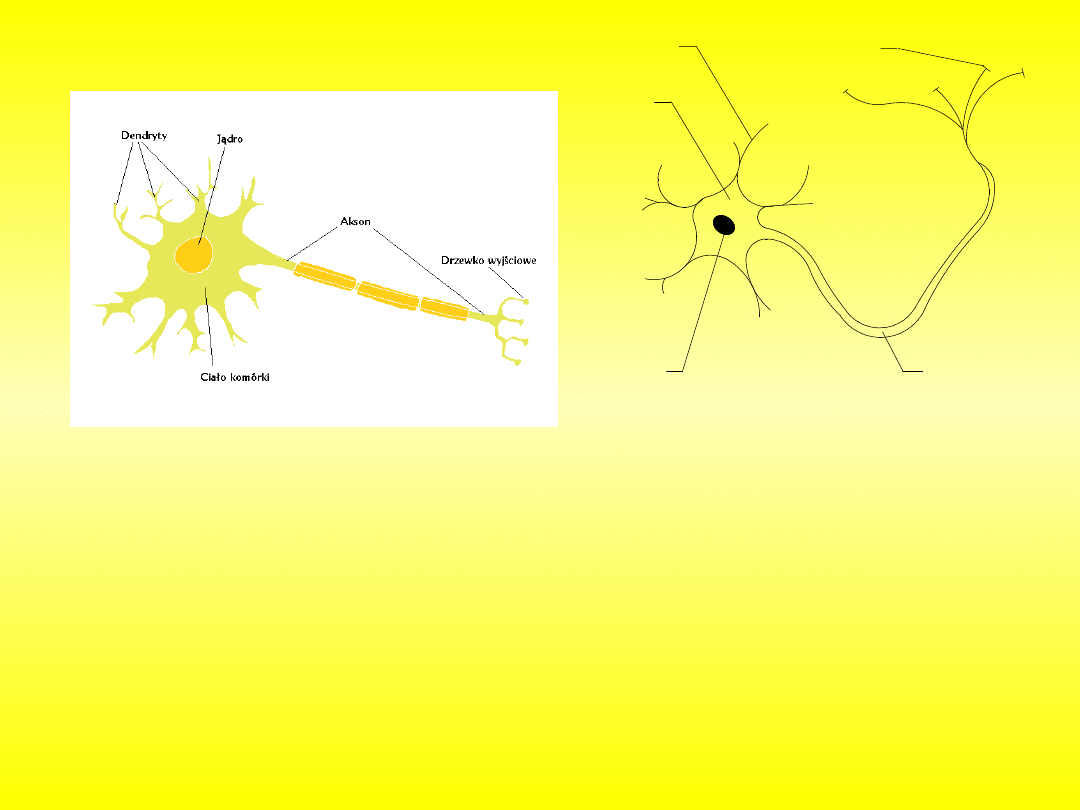
Naturalny neuron
2
3
1
4
5
Rys. Uproszczony schemat budowy
neuronu: 1-cytoplazma komórki, 2-
jądro komórkowe, 3-akson, 4-dendryt,
5-synapsa
Naturalny neuron
2
3
1
4
5
Rys. Uproszczony schemat budowy
neuronu: 1-cytoplazma komórki, 2-
jądro komórkowe, 3-akson, 4-dendryt,
5-synapsa
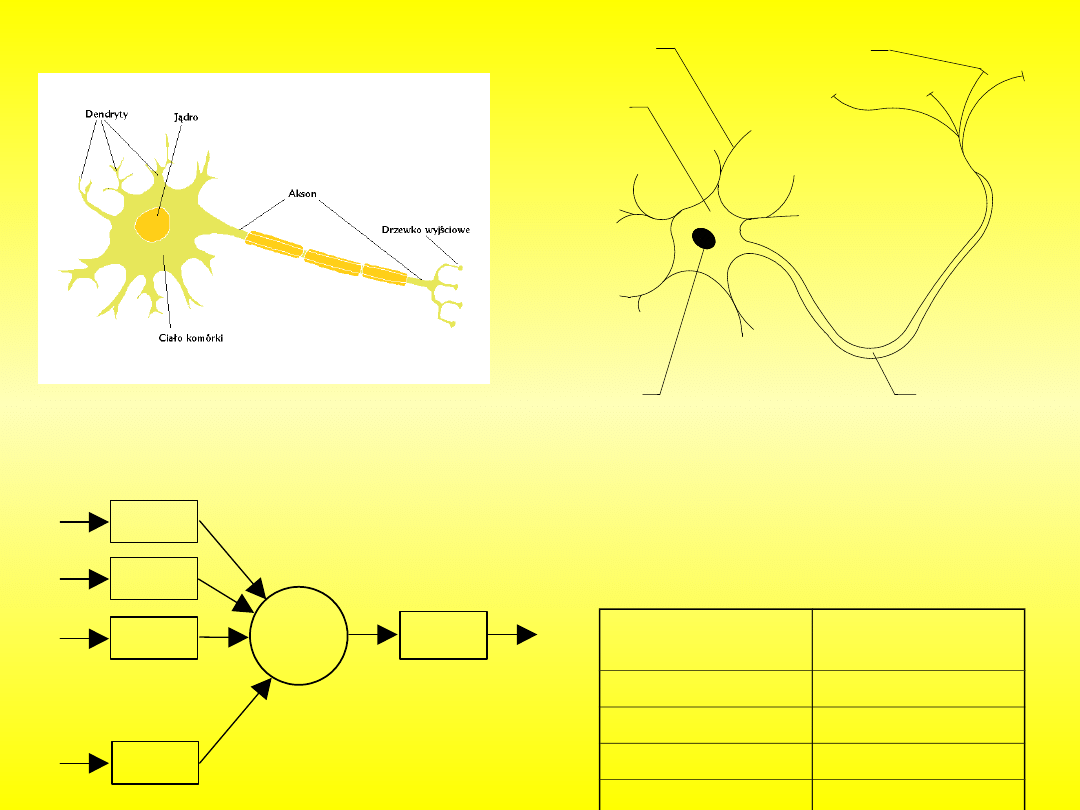
Tab. Porównanie między elementami
naturalnego i modelu neuronu
x
n
x
3
x
2
x
1
y
W
n
W
1
W
2
W
3
( )
Model neuronu
Naturalny
neuron
Model neuronu
Dendryty
Wejścia
Synapsy
Wagi
Jądro
Blok sumujący
Akson
Blok aktywacji

x
n
x
3
x
2
x
1
y
W
n
W
1
W
2
W
3
( )
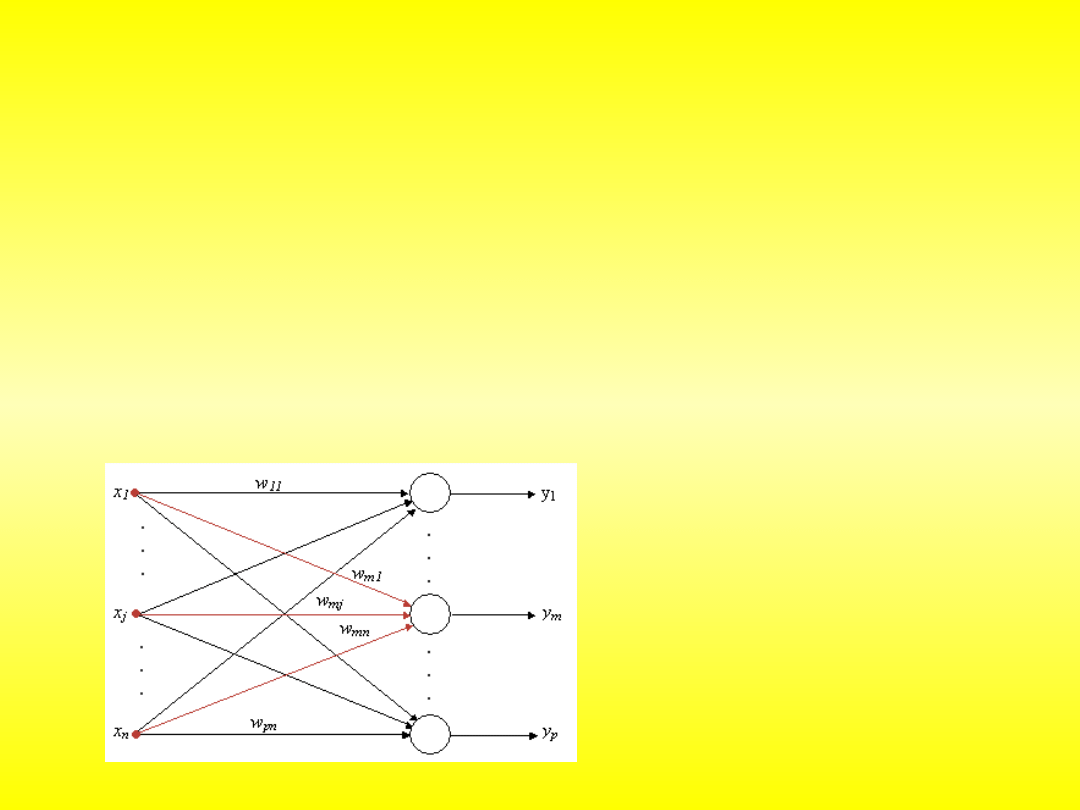
Na wejścia neuronu (ich liczba jest dowolna) warstwa wejściowa lub
inny neuron podaje się informacje. Są one mnożone przez wagi. Wartości wag są
one ustalane przez uczenie się sieci neuronowej, i oznaczają to, jak ważna jest ta
informacja. Blok sumowania, jak sama nazwa wskazuje, sumuje otrzymane
iloczyny. W zależności od przeznaczenia sieci, stosuje się różne funkcje aktywacji.
Informacja z wyjścia trafia na wejścia innych neuronów. Poszczególny neuron jest
już siecią, ale do bardziej skomplikowanych operacji nie wystarczy.
Wprowadzenie do sieci
neuronowych
n
i
i
i
x
W
y
0
Sygnał wyjściowy sumatora:
Sieci neuronowe składają się ze sztucznych neuronów, stworzonych na bazie
neuronów w ludzkim mózgu. Mają bardzo podobne właściwości. Składają się z
wejść, wag, bloku sumowania, bloku aktywacji i wyjścia.
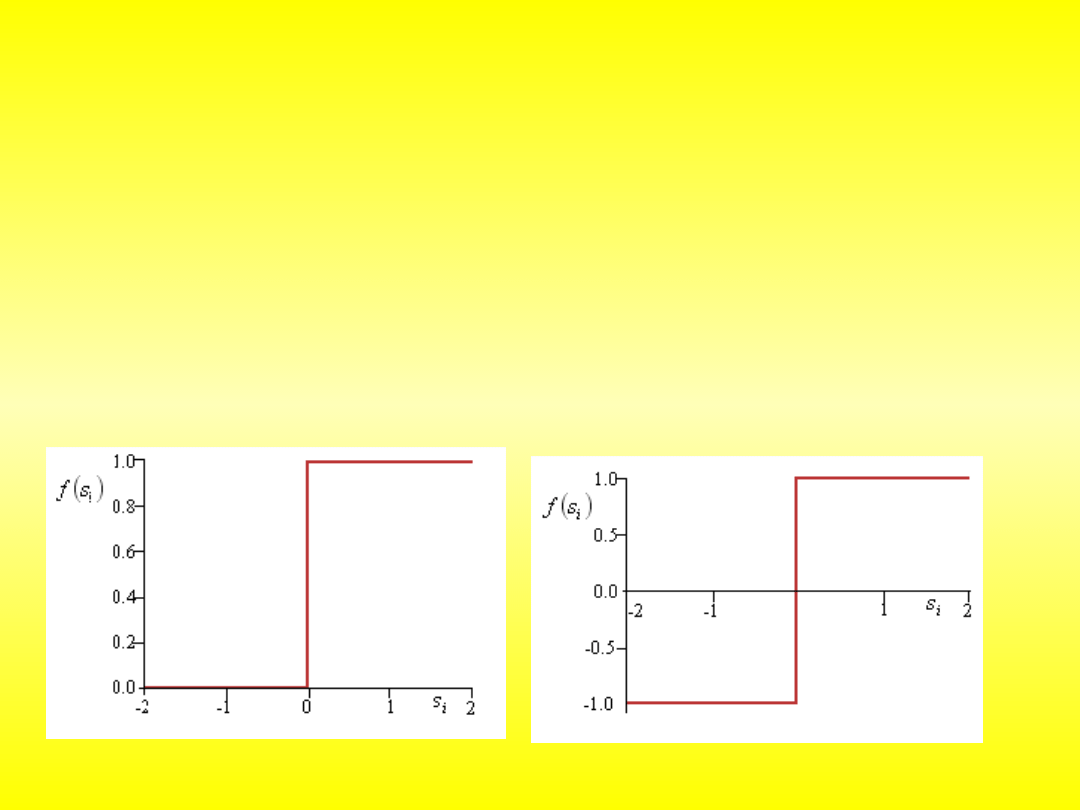
Podział neuronów ze względu na rodzaj funkcji aktywacji
funkcja liniowa
i
i
s
s
f
funkcje nieliniowe dyskretne – skokowe:
0
0
0
1
i
i
i
s
dla
s
dla
s
f
0
1
0
1
sgn
i
i
i
i
s
dla
s
dla
s
s
f
1
,
0
y
1
,
1
y
unipolarna:
bipolarna:
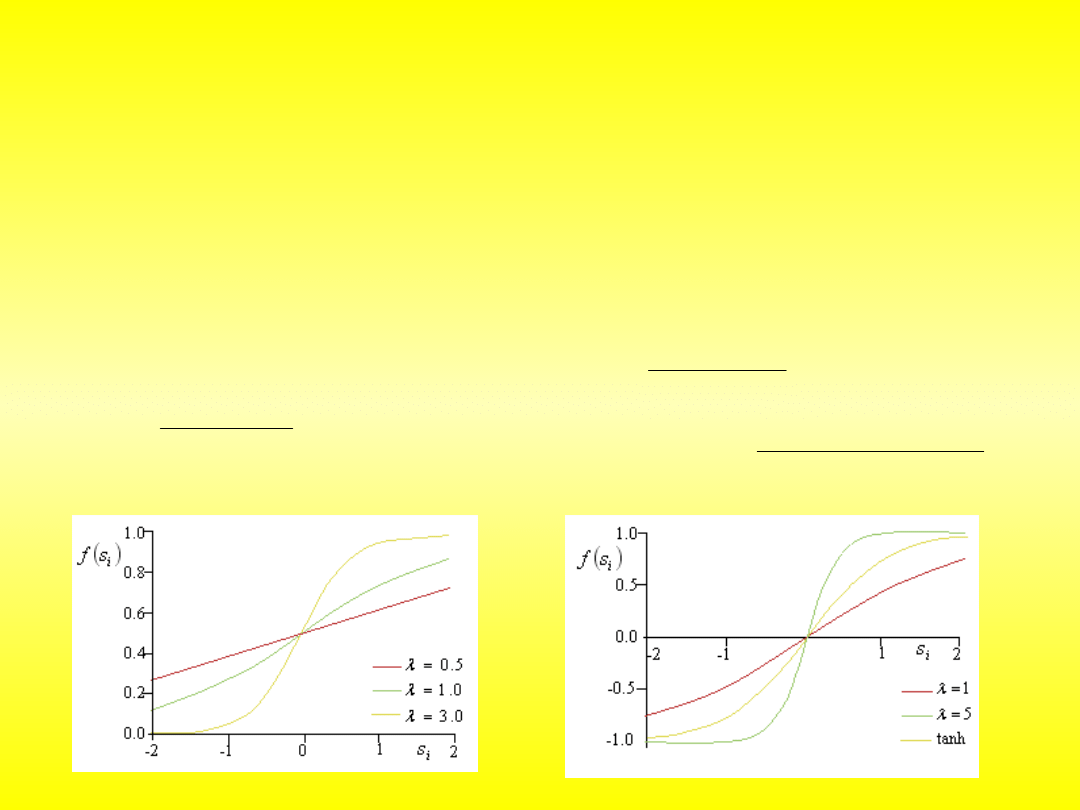
Funkcje nieliniowe ciągłe
i
i
s
s
f
exp
1
1
i
i
s
s
f
exp
1
2
1
,
0
y
1
,
1
y
i
i
i
i
i
i
s
s
s
s
s
s
f
exp
exp
exp
exp
tanh
unipolarna:
bipolarna:
0
0
W bardziej zaawansowanych rozwiązaniach stosuje się funkcje
przejścia. Najpopularniejszą klasę funkcji stosowanych w sieciach neuronowych
stanowią funkcje sigmoidalne, np. tangens hiperboliczny. Sieć zbudowana z
neuronów wyposażonych w nieliniową funkcję przejścia ma zdolność nieliniowej
separacji wzorców wejściowych. Jest więc uniwersalnym klasyfikatorem.
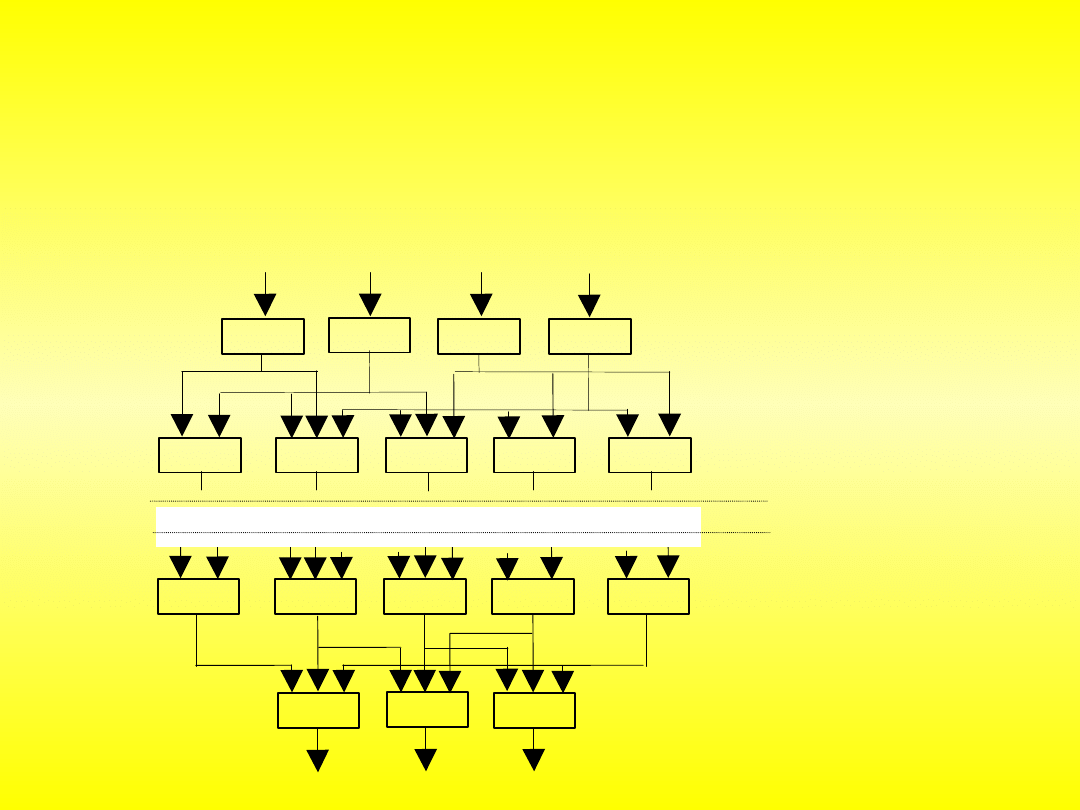
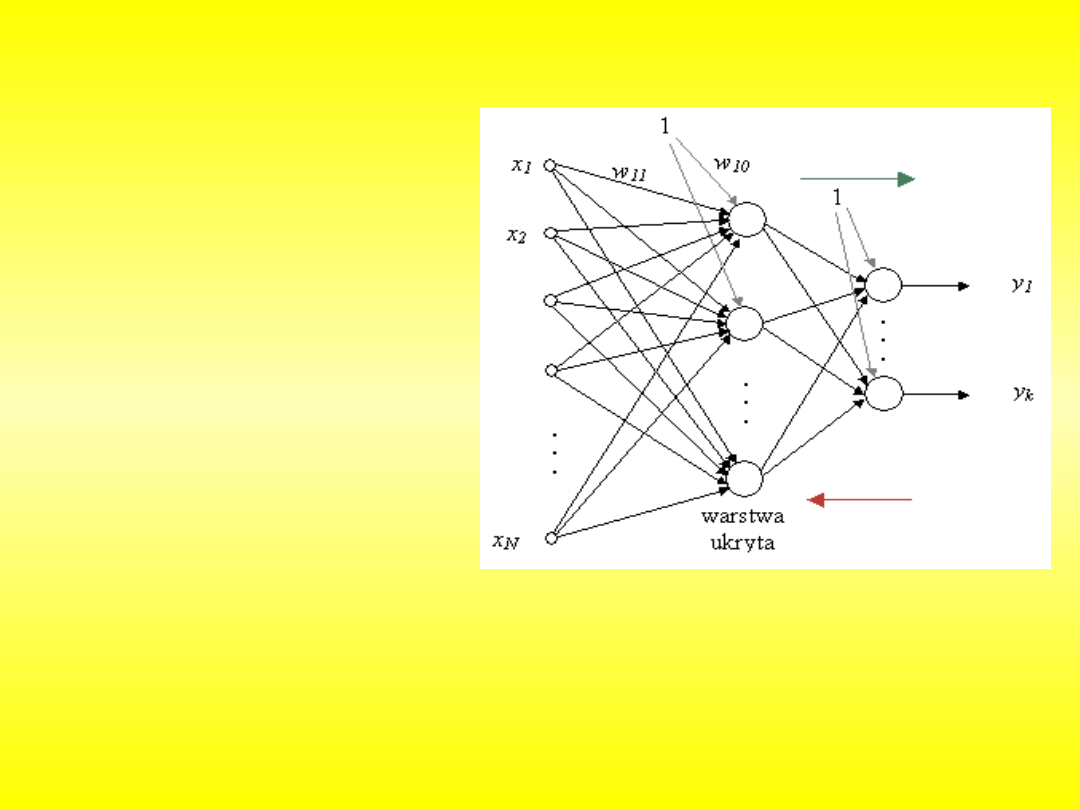
Rozbudowana sieć neuronowa składa się z warstw. Pierwszą warstwą to
zawsze warstwa wejściowa. Pobiera ona od użytkownika lub innej sieci
neuronowej dane, które są przesyłane dalej do sieci. Następną warstwą składa
się już ze sztucznych neuronów, tak zwana warstwa ukryta. Neurony w
poszczególnych warstwach nie są ze sobą połączone, ale łączą się warstwami.
Neuron z warstwy pierwszej jest połączony z wszystkimi neuronami z warstwy
następnej. W praktyce oznacza to, że w sieci może pracować dowolna liczba
warstw. Ostatnią warstwą jest zawsze warstwa wyjściowa. Przekazuje ona
informację czytelną dla użytkownika.
Rys. Budowa sieci neuronowej
neuron
neuron
neuron
neuron
neuron
neuron
neuron
pierwsza
warstwa ukryta
n-ta warstwa
ukryta
warstwa wyjściowa
sygnały wyjściowe
sygnały wejściowe
warstwa wejściowa
neuron
neuron
neuron
neuron
neuron
neuron
neuron
neuron
neuron
neuron
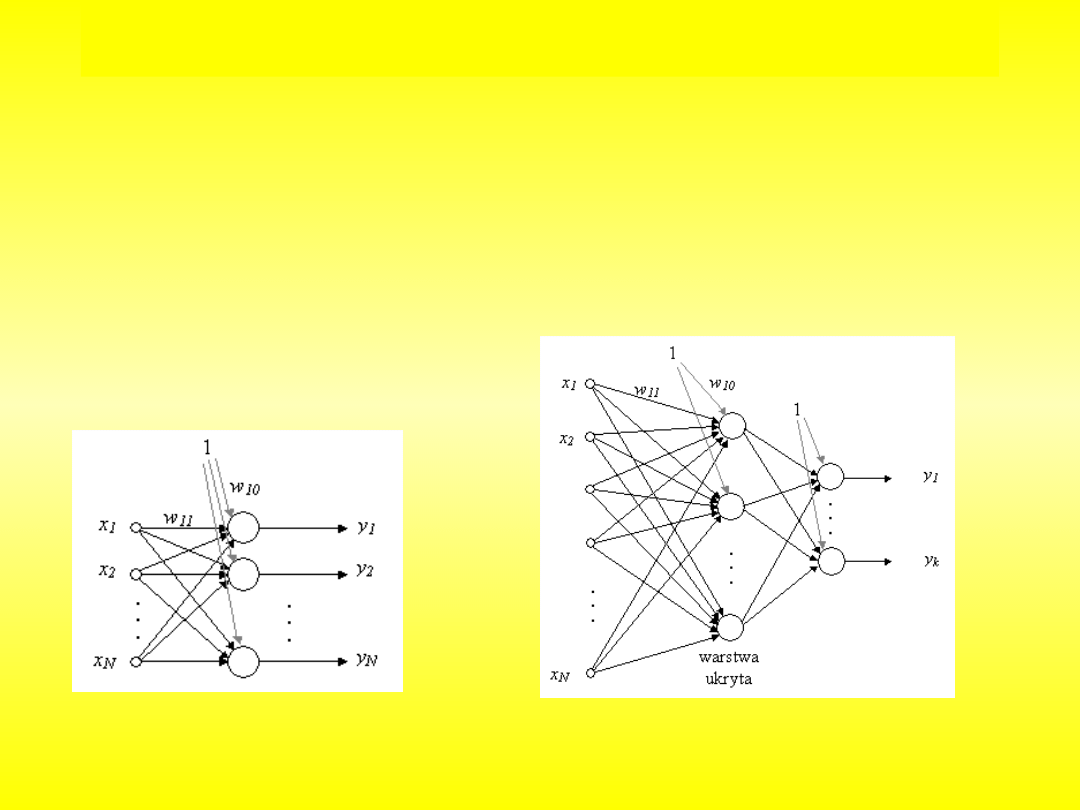
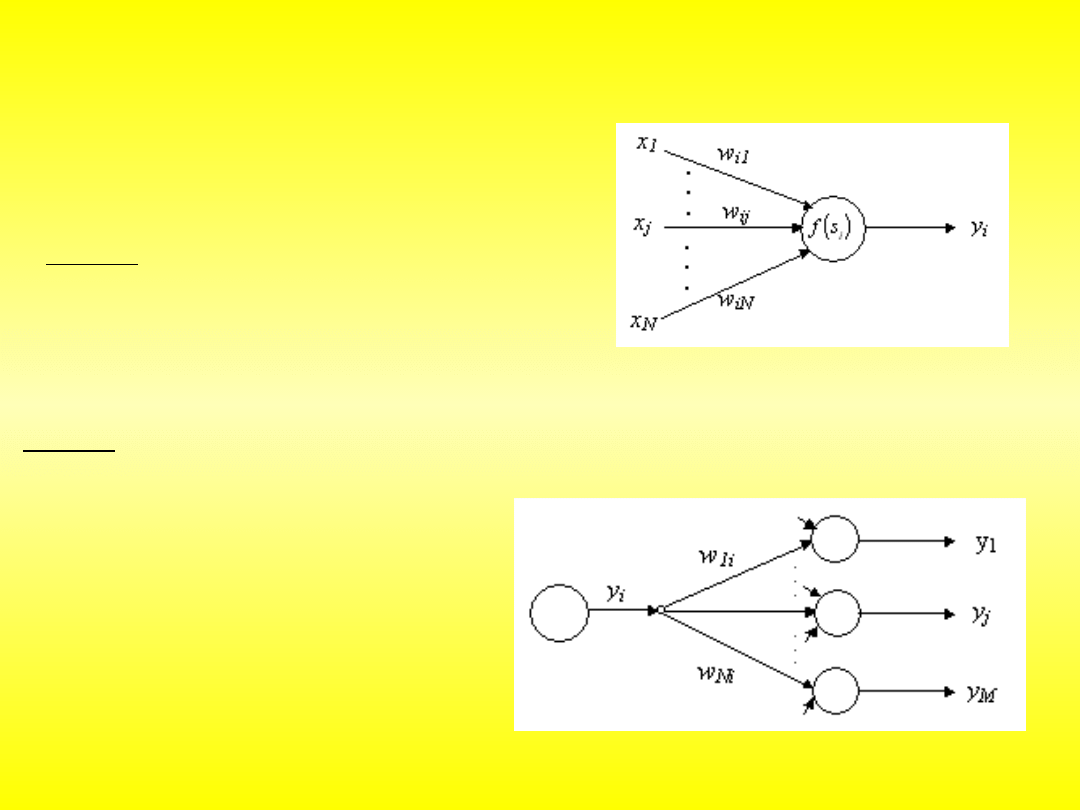
Podstawowe typy architektury sieci
N
j
i
j
ij
N
j
i
j
ij
i
i
x
w
f
w
x
w
f
s
f
y
1
1
0
H
h
N
j
h
j
hj
h
hk
k
k
w
x
w
f
w
w
f
y
1
1
0
0
0
jednowarstwowe
wielowarstwowe
Cechą wspólną wszystkich sieci neuronowych jest to, że na ich
strukturę składają się neurony połączone ze sobą synapsami. Z synapsami
związane są wagi, czyli wartości liczbowe, których interpretacja zależy od
modelu.
Sieci jednokierunkowe
to sieci neuronowe, w których nie występuje
, czyli pojedynczy wzorzec lub sygnał przechodzi przez
każdy neuron dokładnie raz w swoim cyklu. Najprostszą siecią neuronową jest
pojedynczy perceptron progowy, opracowany przez McCullocha i Pittsa w roku
1943.
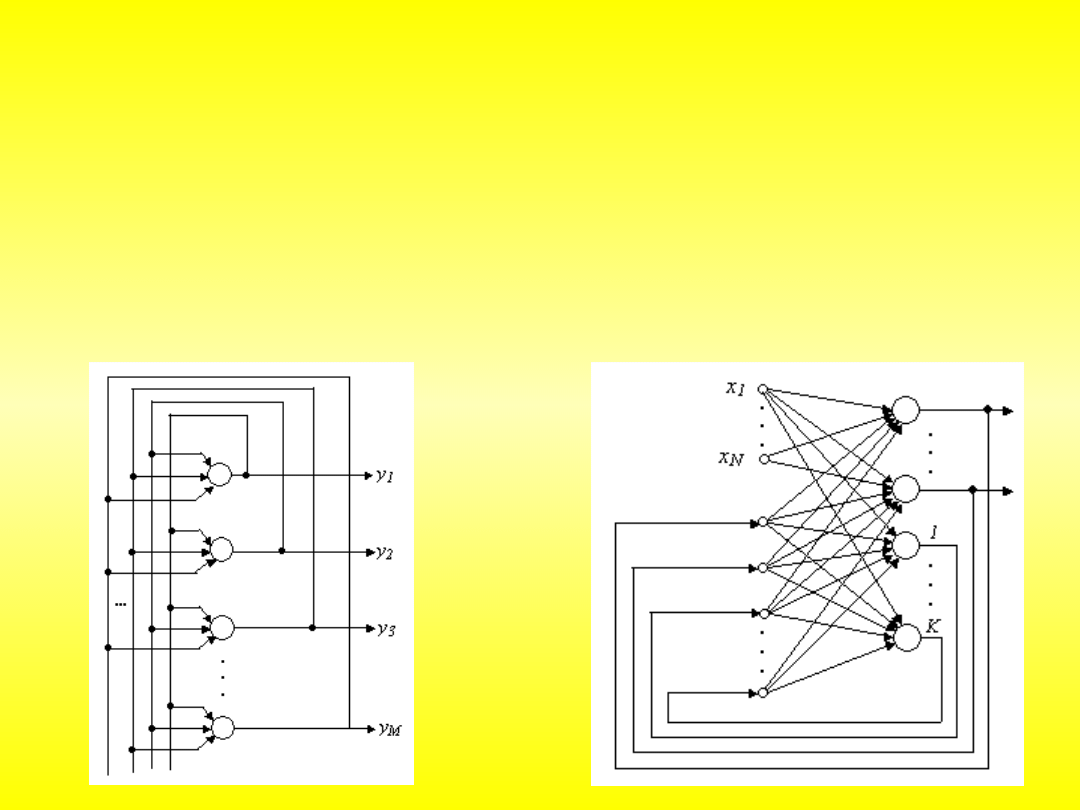
jednowarstwowe
wielowarstwowe
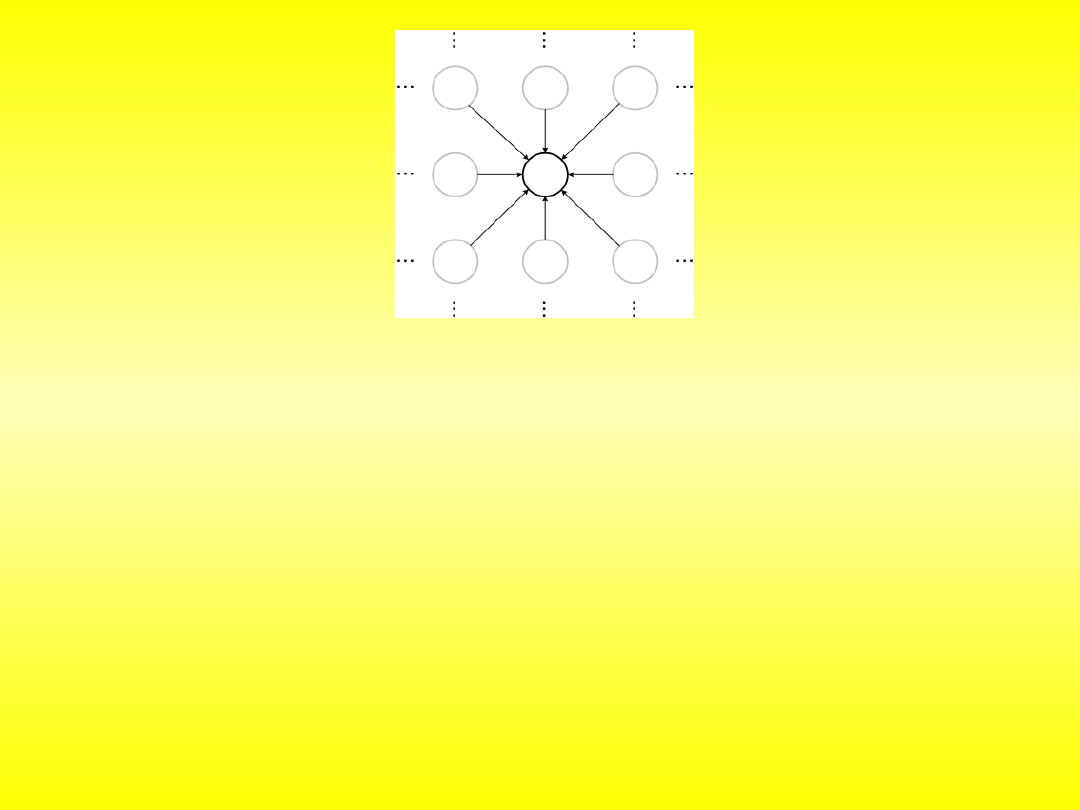
Sieci rekurencyjne
to sieci, w których połączenia między neuronami stanowią
z cyklami. Wśród różnorodności modeli rekurencyjnych sztucznych sieci
neuronowych wyróżnić można:
– układ gęsto połączonych ze sobą neuronów (każdy z każdym,
ale bez połączeń zwrotnych) realizującą dynamikę gwarantującą zbieżność do
preferowanych wzorców
– opracowana przez
i
stochastyczna modyfikacja sieci Hopfielda; modyfikacja ta pozwoliła na uczenie
neuronów ukrytych i likwidację wzorców pasożytniczych kosztem zwiększenia
czasu symulacji.
Sieci Hopfielda i maszyny Boltzmanna stosuje się jako pamięci adresowane
kontekstowo, do
,
, a także do
rozwiązywania problemów minimalizacji (np.
).
۰ podklasa sieci rekurencyjnych, która wyróżniana ze względu na swoją funkcję,
۰
wzorowana na zasadach funkcjonowania mózgu ludzkiego
۰ zdolność odtwarzania całości informacji na podstawie informacji niepełnej lub
zniekształcone,j
Sieci komórkowe

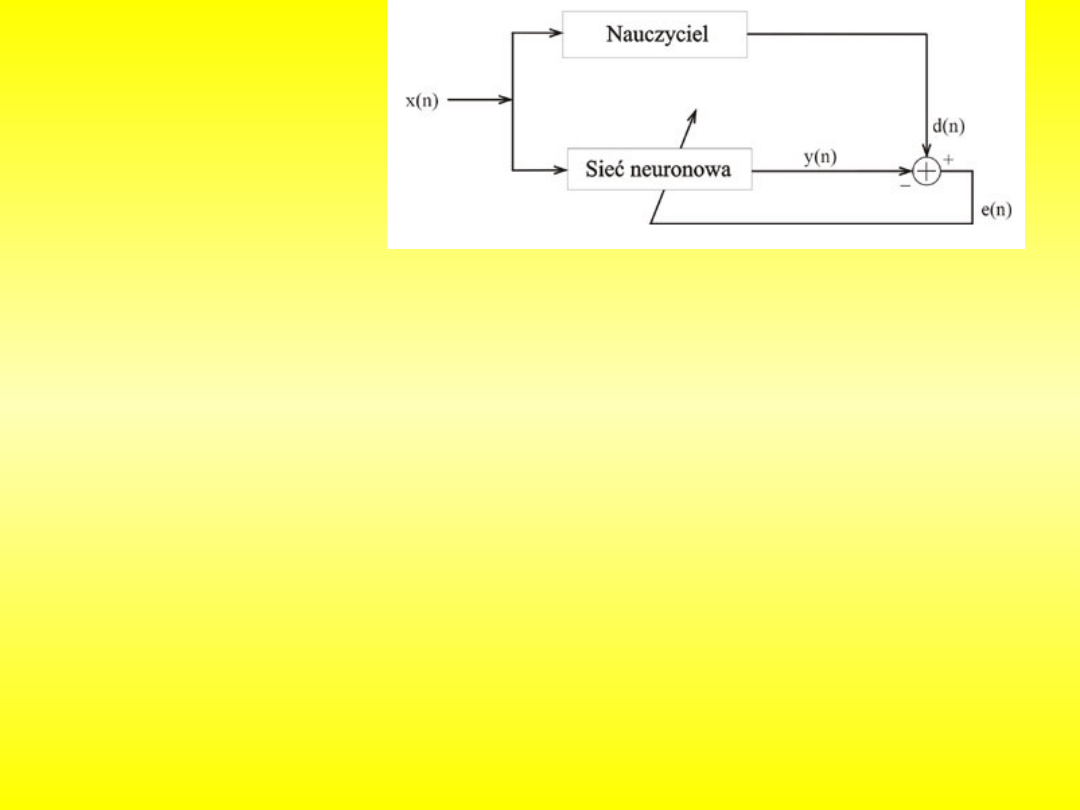
Sposoby uczenia sieci:
1. Nauka z nauczycielem
2. Nauka z krytykiem
3. Samodzielna nauka sieci
Nauczona sieć neuronowa może już służyć do tego, do czego została stworzona
.
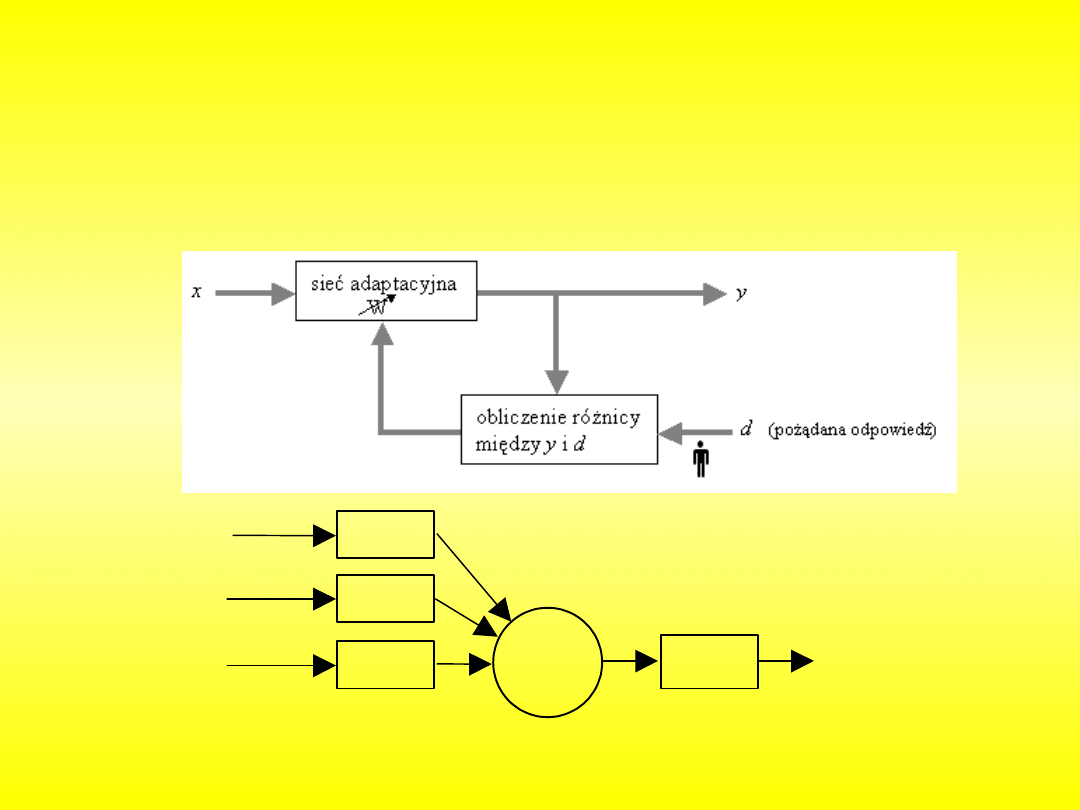
Jedną z zalet sieci neuronowych jest to, że nie trzeba prawie nic
programować. Sieć neuronową się uczy. Nauka polega na “dostrajaniu” wag w
ten sposób, aby sieć rozpoznawała dane poprawnie.
W modelu neuronu, zmianę wagi synaptycznej W
i
(j)
neuronu W
i
(j)
podczas przejścia z chwili j do j+1, która zależy od jego stanu y
(j)
oraz stanu
wejścia x
i
(j)
, analizuje się wg wzoru:
W
i
(j)
= y
(j)
x
i
(j)
(1)
Zmodyfikowana waga:
W
i
(j+1)
= W
i
(j)
+ W
i
(j)
(2)
W
i
(j+1)
= W
i
(j)
+ y
(j)
x
i
(j)
(3)
Nauka z nauczycielem
x
3
= 4
x
2
= 2
x
1
= 3
Y = 16
W
1
= 2
W
2
= 3
W
3
= 1
( )
W tym sposobie, nauczyciel samodzielnie koryguje wagi. Przykładowo:
nauczyciel podaje na wejście sieci dane. Następnie sprawdza poprawność danych
na wyjściu. Jeśli informacja okaże się błędna, nauczyciel ręcznie zmienia wagi, i
uruchamia sieć z tymi samymi danymi, aż do skutku. Jest to dość pracochłonny
sposób.
Instar i Outstar
۰ zdefiniowane przez S. Grossberga
۰ komplementarne
Instar: dopasowuje wagi do sygnałów wejściowych
zadanie: rozpoznanie wektora danego na wejście
Outstar: dopasowuje wagi wychodzące z neuronu do węzłów,
dla których zadane są wartości sygnałów wyjściowych
zadanie: wygenerowanie w odpowiedzi na określony sygnał wejściowy
wektora pożądanego przez inne neurony powiązane z danym neuronem
۰ cel: modyfikacja, aby dla wszystkich wektorów wejściowych
0
,
k
e
k
y
k
d
0
,
k
e
k
y
k
d
osłabiamy wagi neuronu
wzmacniamy wagi neuronu
۰ zasada działania:
0
k
e
۰ działanie: - inicjalizacja wag w
ij
- podanie wektora uczącego na wejście x
- wyznaczenie wartość sygnału wyjściowego y
- korekcja wektora wag wg wzoru:
1
;
1
1
;
1
1
k
d
k
y
gdy
k
x
k
w
k
d
k
y
gdy
k
x
k
w
k
d
k
y
gdy
k
w
k
w
i
i
i
i
Procedurę powtarza się dla wszystkich danych uczących, aż do uzyskania
minimalizacji różnicy pomiędzy d i y
۰ prezentacja nowego wektora uczącego i ponowna aktualizacja wag
reguła perceptronowa
i
i
d
x ,
– zbiór par wektorów (wzorców) uczących postaci:
T
M
d
d
d
...,
,
1
k
y
k
d
k
e
– funkcja błędu
1
,
1
k
y
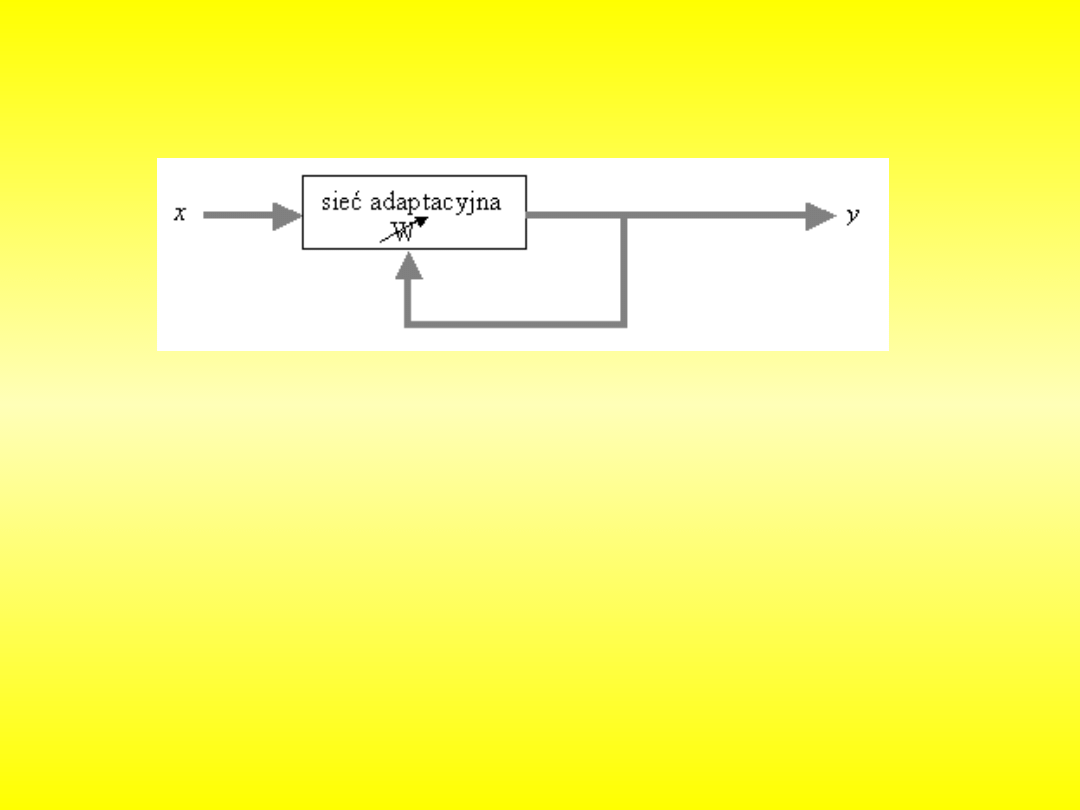
Uczenie z
nauczycielem jako
system adaptacyjny

Nauka z krytykiem
Odmiana uczenia z nauczycielem.
Ucząc sieć w ten sposób, nie koryguje
się nic ręcznie. Sieć sama próbuje korygować wagi. Krytyk tylko
informuje sieć o poprawności danych otrzymanych na wyjściu.
nie korzysta się z informacji o pożądanych wartościach wyjściowych
systemu,
korzysta się z informacji, czy zmiana wartości wag, która została
podjęta daje wyniki
pozytywne czy negatywne w sensie pożądanego zachowania systemu:
̶̶ pozytywne wzmocnienie tendencji do właściwego zachowania się
systemu w podobnych sytuacjach w przyszłości,
̶̶ negatywne osłabienie tendencji takiego działania systemu,
bardziej uniwersalne w zastosowaniu,
realizacja praktyczna - bardziej skomplikowana.
Uczenie bez
nauczyciela
۰
algorytm uczenia typu korelacyjnego
reguła Hebba
۰
wykorzystuje wyniki obserwacji biologicznych: waga powiązań między
neuronami wzrasta przy jednoczesnym pobudzeniu obu neuronów, w
przeciwnym wypadku maleje:
k
w
k
w
k
w
ij
ij
ij
1
k
y
k
cx
k
w
i
j
ij
x
j
– sygnał wejściowy (presynaptyczny)
y
i
– sygnał wyjściowy (postsynaptyczny)
c – z (0,1), współczynnik określający stopień w jakim sygnały uczące
w chwili k wpływają na dobór wag
w
ij
– waga połączenia między sygnałem wejściowym x
j
a węzłem sumacyjnym
i-tego neuronu o sygnale wyjściowym y
i
Sieci neuronowe potrafią się też uczyć same. Działa to dzięki takim
zasadom jak “wygrywający bierze wszystko”. Jednak te metody nauki nie
zawsze są skuteczne.

Uczenie sieci wielowarstwowej
۰ 1969 – Minsky i Papert – Perceptrons:
- kilku elementarnych obliczeń nie można wykonać na jednowarstwowym
perceptronie (np. problem XOR)
- brak algorytmów uczenia dla sieci wielowarstwowych
۰ 1985 – algorytm wstecznej propagacji błędu:
- algorytm uczenia sieci wielowarstwowej
- możliwość rozwiązania wielu problemów, z którymi nie potrafiły
sobie poradzić sieci jednowarstwowe (np. XOR)
Metoda wstecznej propagacji błędu (back propagation)
۰ podanie na wejście sygnału uczącego x
i wyliczenie aktualnych wyjść y
۰ obliczenie błędów w warstwie ostatniej
(na podstawie porównania sygnałów
wyjściowych y i wzorcowych d)
۰ obliczenie błędów dla neuronów we
wszystkich warstwach wcześniejszych po kolei
(zawsze jako pewnej funkcji błędu warstwy następnej, który jest już znany)
۰ adaptacja wag:
od warstwy wejściowej do wyjściowej
۰ sygnał błędu rozprzestrzenia się wstecz: od warstwy ostatniej do wejściowej
۰ powtarzamy procedurę do momentu kiedy sygnały wyjściowe sieci będą
dostatecznie bliskie oczekiwanym
algorytm:

Sieci Kohonena
Sieci Kohonena są jednym z podstawowych typów sieci
samoorganizujących się. Właśnie dzięki zdolności samoorganizacji
otwierają się zupełnie nowe możliwości - adaptacja do wcześniej
nieznanych danych wejściowych, o których bardzo niewiele wiadomo.
Wydaje się to naturalnym sposobem uczenia, który jest używany chociażby
w naszych mózgach, którym nikt nie definiuje żadnych wzorców, tylko
muszą się one krystalizować w trakcie procesu uczenia, połączonego z
normalnym funkcjonowaniem. Sieci Kohonena stanowią synonim całej
grupy sieci, w których uczenie odbywa się metodą samoorganizującą typu
konkurencyjnego. Polega ona na podawaniu na wejścia sieci sygnałów, a
następnie wybraniu w drodze konkurencji zwycięskiego neuronu, który
najlepiej
odpowiada
wektorowi
wejściowemu.
Dokładny
schemat
konkurencji i późniejszej modyfikacji wag synaptycznych może mieć różną
postać. Wyróżnia się wiele podtypów sieci opartych na konkurencji, które
różnią się dokładnym algorytmem samoorganizacji.
Najczęściej stosuje się w tego typu sieciach architekturę
jednokierunkową jednowarstwową. Jest to podyktowane faktem, że
wszystkie neurony muszą uczestniczyć w konkurencji na równych prawach.
Dlatego każdy z nich musi mieć tyle wejść ile jest wejść całego systemu.
Jest to podyktowane faktem, że wszystkie neurony muszą uczestniczyć w
konkurencji na równych prawach. Dlatego każdy z nich musi mieć tyle wejść
ile jest wejść całego systemu.
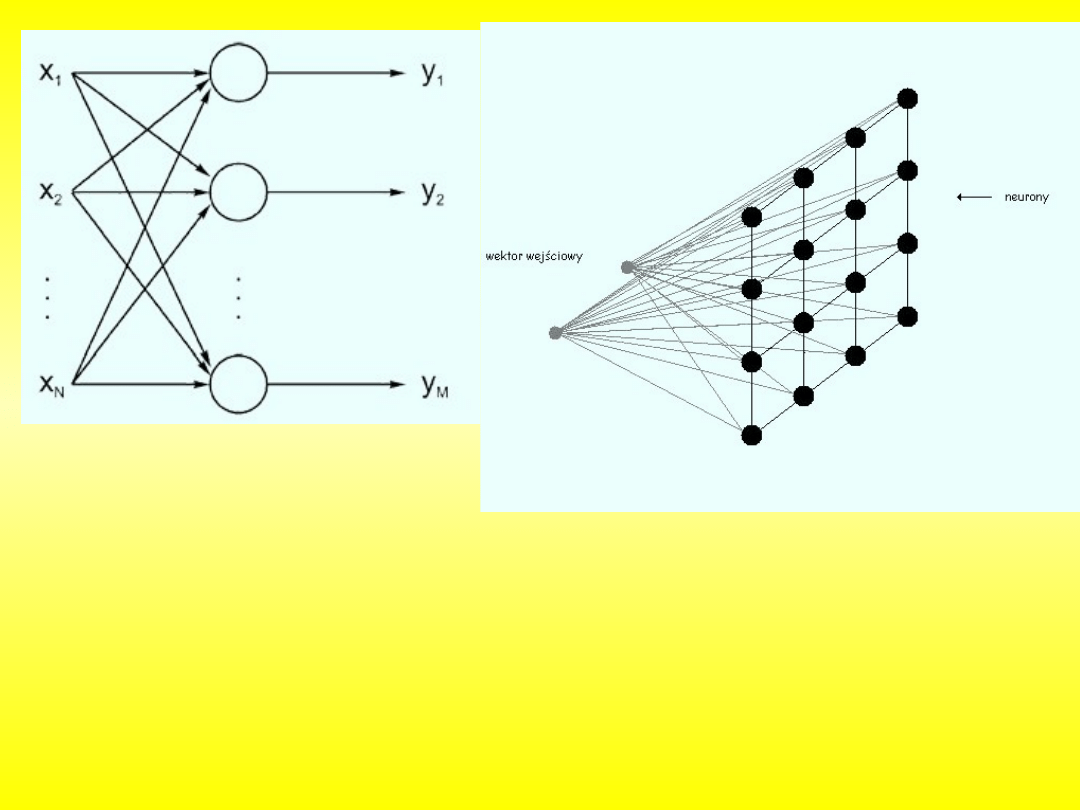
Schemat sieci jednowarstwowej
jednokierunkowej
Dwuwymiarowa mapa neuronów

Etapy działania::
Funkcjonowanie samoorganizujących się sieci neuronowych odbywa się w
trzech etapach:
• konstrukcja
• uczenie
• rozpoznawanie
System, który miałby realizować funkcjonowanie sieci samoorganizującej
powinien składać się z kilku podstawowych elementów. Pierwszym z nich jest
macierz neuronów pobudzanych przez sygnały wejściowe. Sygnały te powinny
opisywać pewne charakterystyczne cechy zjawisk zachodzących w otoczeniu, tak,
aby na ich podstawie sieć była w stanie je pogrupować. Informacja o zdarzeniach
jest przekładana na bodźce pobudzające neurony. Zbiór sygnałów przekazywanych
do każdego neuronu nie musi być identyczny, nawet ich ilość może być różna.
Muszą one jednak spełniać pewien warunek, a mianowicie jednoznacznie określać
dane zdarzenia.
Kolejną częścią składową sieci jest mechanizm, który dla każdego
neuronu określa stopień podobieństwa jego wag do danego sygnału wejściowego
oraz wyznacza jednostkę z największym dopasowaniem - zwycięzcę. Obliczenia
zaczyna się dla wag równych małym liczbom losowym, przy czym ważne jest, aby
nie zachodziła żadna symetria. W trakcie uczenia wagi te są modyfikowane w taki
sposób, aby najlepiej odzwierciedlać wewnętrzną strukturę danych wejściowych.
Istnieje jednak niebezpieczeństwo, że zwiążą się one z pewnymi wartościami
zanim jeszcze grupy zostaną prawidłowo rozpoznane i wtedy trzeba ponawiać
uczenie z innymi wagami.
Wreszcie konieczne do przeprowadzenia samoorganizacji jest, aby sieć
była wyposażona w zdolność do adaptacji wartości wag neuronu zwycięzcy i jego
sąsiadów w zależności od siły, z jaką odpowiedział on na dane wejście. Topologię
sieci można w łatwy sposób określić poprzez zdefiniowanie sąsiadów dla każdego
neuronu. Załóżmy, że jednostkę, której odpowiedź na dane pobudzenie jest
maksymalna, będziemy nazywali "obrazem" tego pobudzenia. Wtedy możemy
przyjąć, że sieć jest uporządkowana, jeśli topologiczne relacje między sygnałami
wejściowymi i ich obrazami są takie same.

Współcześnie nie ma wątpliwości, że sztuczne sieci neuronowe nie
stanowią dobrego modelu mózgu, choć różne ich postaci wykazują cechy
charakterystyczne dla biologicznych układów neuronowych: zdolność do
uogólniania wiedzy, uaktualniania kosztem wcześniej poznanych wzorców,
dawanie mylnych odpowiedzi po przepełnieniu. Mimo uproszczonej budowy
sztuczne sieci neuronowe stosuje się czasem do modelowania schorzeń
mózgu.
Sztuczne sieci neuronowe znajdują zastosowanie w rozpoznawaniu
i klasyfikacji wzorców (przydzielaniu wzorcom kategorii), predykcji
szeregów czasowych, analizie danych statystycznych, odszumianiu i
kompresji obrazu i dźwięku oraz w zagadnieniach sterowania i
automatyzacji.

Magazyn BYTE wymienia między innymi następujące zastosowania tych
sieci:
•diagnostyka
•badania psychiatryczne
•prognozy giełdowe
•prognozowanie sprzedaży
•poszukiwania
•interpretacja badań biologicznych
•prognozy cen
•analiza badań medycznych
•planowanie remontów maszyn
•planowanie postępów w nauce
•analiza problemów produkcyjnych
•optymalizacja działalności handlowej
•analiza
•optymalizacja utylizacji odpadów
•dobór surowców
•selekcja celów śledztwa w kryminalistyce
•dobór pracowników
•sterowanie procesów przemysłowych.
Najpopularniejsze obecnie zastosowanie sieci neuronowych:
•w programach do rozpoznawania pisma,
•na lotniskach do sprawdzania, czy prześwietlony bagaż zawiera
niebezpieczne ładunki
Rys. 9.5. Schemat blokowy układu uczącego się
Zastosowanie sieci neuronowych do sterowania ruchem
robota
Rozważony będzie przykład sterowania ruchem dwóch członów
wykonawczych robota przegubowego, sterowania opartego o zasady
działania układów biologicznych i wykorzystującego warstwowe sieci
neuronowe. Zadaniem układu będzie kompensacja błędów trajektorii ruchu,
które mogą być spowodowane wpływem warunków rzeczywistych, poprzez
“nauczenie się” niezbędnych poprawek, określonych różnicami
1
=
1
- ’
1
oraz
2
=
2
- ’
2
(10.3)
gdzie: 1 ,2 - rzeczywiste wartości przemieszczeń kątowych, odpowiednio dla pierwszej, i
drugiej pary kinematycznej, 1, 2, - teoretycznie obliczone wartości przemieszczeń
.
Sieć
neuronowa
Układ sterowania
robota
1
’
2
’
x y
1
2
1
2
Współrzędne prostokątne x, y punktu końcowego (docelowego)
ruchu są wprowadzone do układu sterowania ruchem robota, a jego
zadaniem jest wygenerowanie takich wartości sygnałów, aby kąty ustawienia
ramion 1 ,2 dokładnie odpowiadały punktowi o współrzędnych x, y.
Przekształcenia
obliczane
przez
sterownik
robota
określone
są
zależnościami:
c
-
l
l
s
l
arctg
x
y
arctg
2
1
2
1
c
s
arctg
2
2
1
2
2
2
1
2
2
2
l
l
2
l
-
l
-
y
+
x
cos
s
2
sin
c
gdzie: l
1
, l
2
- długości ramion.
Uczenie sieci polegało na ustaleniu wag połączeń dla zbioru
punktów x, y w przestrzeni roboczej robota. Stwierdzono, że uczenie sieci
nawet na jednym tylko punkcie powoduje poprawę dokładności o ok. 50%,
natomiast po 8 punktowej serii uczącej, dokładność pozycjonowania
wzrastała 10 - krotnie. Bardzo krótki czas uczenia pozwala na szybkie
dostosowanie urządzenia do zmieniających się warunków pracy -
przykładowo w przypadku niewielkich przesunięć podstawy robota.

Zastosowanie sieci neuronowych do rozpoznawania
obrazów
Obraz z kamery jest przetwarzany na mapę bitową, a w dalszym
etapie przy pomocy sieci neuronowych następuje rozpoznanie obiektu na
podstawie jego cech charakterystycznych i sklasyfikowanie do odpowiedniego
typu obiektów. Przy układach scalonych sprawdza się też, czy został
wmontowany wcześniej określony typ układu oraz czy też nie został on
obrócony przy montażu o kąt 180
0
.
Kamera TV która zapisała ten obraz znajdowała się w stałej
odległości od analizowanych obiektów, znajdujących się na stanowisku
oświetlanym przez lampę halogenową. Uzyskany obraz ma 256 poziomów
jasności i wymiary 512 x 512 pikseli.
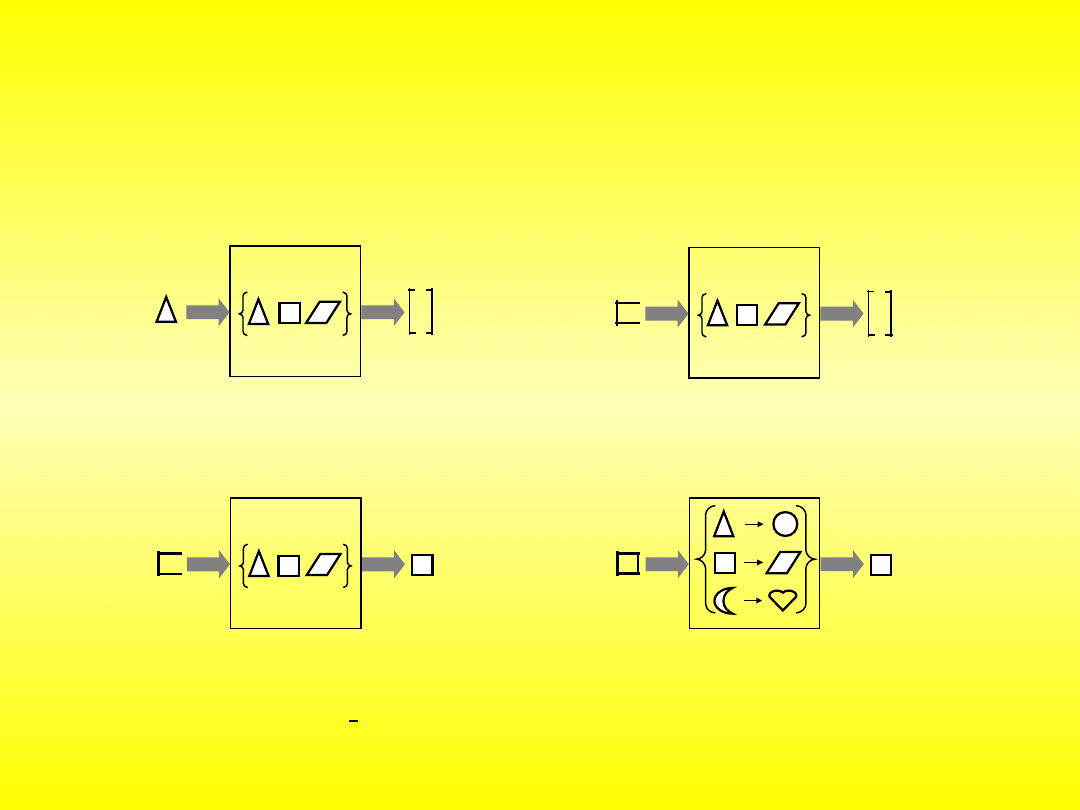
Zadania sieci neuronowej
klasyfikacja i rozpoznawanie
obraz
wejściowy
numer
klasy
0
1
obraz
wejściowy
1
0
numer
klasy
asocjacja
autoasocjacja
heteroasocjacja
wykrywanie grup
optymalizacja
obraz
wejściowy
numer
klasy
niekompletny
kwadrat
kwadrat
obraz
wejściowy
numer
klasy
niekompletny
kwadrat
kwadrat

W pierwszym etapie obraz zostaje poddany procesowi binaryzacji.
Istotą jest przypisanie każdemu z pikseli obrazu, jednego z dwóch
poziomów jasności. W tym przypadku w grę założono poziomy 0 i 255
odpowiadające odpowiednio barwom czarnej i białej. Aby przypisać
pikselom odpowiedni poziom jasności musi być zdefiniowana uprzednio
wartość progowa. Od niej zależy to, czy na pozyskanym z kamery obrazie
poziomy jasności pikseli będą znajdowały się poniżej czy powyżej wartości
progowej. Wynikiem procesu binaryzacji jest zawsze znaczna redukcja
informacji zawartej w obrazie. Zatem odpowiedni dobór wartości progowej
jest bardzo istotny, ponieważ bez niej mogłyby zostać utracone w obrazie
informacje, bez których rozpoznanie obiektu stałoby się niemożliwe do
zrealizowania. Po zdefiniowaniu wartości progowej w tym przypadku
wszystkie piksele staną się czarne lub białe – rys. 10.9.
Rys. 10.9. Obraz układu scalonego po binaryzacji
W
drugim
etapie
wstępnego
przetwarzania,
obraz
zbinaryzowany poddawany jest segmentacji. W tym przykładzie ma to na
celu wydzielenie z obrazu fragmentu przedstawiającego oznaczenia na
obudowie układu scalonego.
Analizując osiem typów układów scalonych, przy podziale
fragmentu obrazu na cztery równe części o wymiarach 50 x 75 pikseli,
otrzymano wzorcowe wartości cech dla każdego z sektorów zestawione w
tabeli 10.1.
Typ
piksele
UCY7453
SN7406
N
UCY740
4
SN7403N UCY7417 UCY7438
UCA6410
UL1201
sek. 1
83
759
0
570
109
332
99
8
sek. 2
707
779
568
526
666
619
458
689
sek. 3
706
467
604
835
775
428
698
702
sek. 4
555
474
439
627
251
274
357
240
Tablica 10.1. Wzorcowe wartości cech różnych typów układów
scalonych
Otrzymane w ten sposób liczby stanowią dane wejściowe, na
podstawie których można skonstruować zbór treningowy do nauczania
sieci neuronowej prawidłowej realizacji zadania rozpoznawania. Po
ukończeniu procesu treningu i po podaniu na wejścia liczby
odpowiadające białym pikselom w poszczególnych sektorach obrazu, sieć
powinna wskazać do której z uprzednio określonych klas przynależności
ten układ należy.
Dalej pokazano wyniki przy pracy na nieliniowej sieci neuronowej
Hopfielda składającej się z trzech warstw. Warstwy wejściowe i ukryte
składają się z trzech neuronów, a warstwa wyjściowa ma osiem neuronów, co
odpowiada liczbie klas przynależności rozpoznawanych układów scalonych.
Ten z neuronów, który wykazuje największą wartość sygnału na swoim
wyjściu, wskazuje na klasę przynależności aktualnie rozpoznawanego układu
scalonego. Po treningu sieci, w przypadku podziału obrazu układu na trzy i
cztery równe sektory, otrzymano różne wyniki rozpoznawania.
Przy podziale na cztery sektory wyniki stu eksperymentów wykazały
bezbłędne wytypowanie właściwej klasy przynależności układu – tab. 10.2.
Wyniki
UCY7453 SN7406N UCY7404 SN7403N UCY7417 UCY7438
UCA6410
UL1201
Trafne 100
100
100
100
100
100
100
100
Błędn
e
0
0
0
0
0
0
0
0
Tablica 10.2. Wyniki rozpoznawania obrazów układów scalonych (podział obrazu na 4
sektory) dla sieci trójwarstwowej
Inaczej było przy podziale na trzy sektory. W przypadku
trójwymiarowej przestrzeni cech opisującej obrazy rozpoznawanych
układów scalonych pojawiły się pierwsze błędy procesu rozpoznawania.
Łatwo więc stwierdzić, że nie należy zbyt zmniejszać ilości informacji o
danym obiekcie bo efekty są odwrotne od oczekiwanych.
Wyniki
UCY7453 SN7406N UCY7404 SN7403N UCY7417 UCY743
8
UCA6410
UL1201
Trafne 100
98
99
100
96
99
100
98
błędn
e
0
2
1
0
4
1
0
2
Tablica 10.3. Wyniki rozpoznawania obrazów układów scalonych (podział obrazu na 3
sektory) dla sieci trójwarstwowej
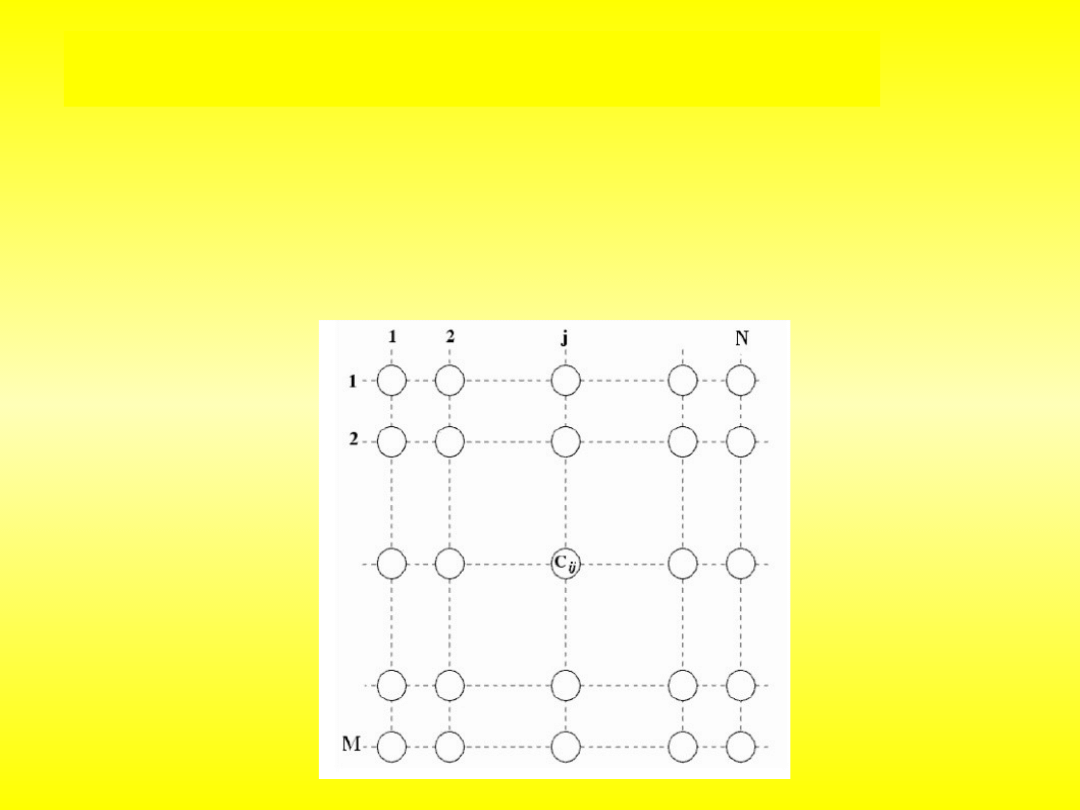
Jednym z narzędzi automatycznego planowania trasy przejazdu
robota mobilnego są neuronowe sieci komórkowe (ang. CNN - Cellular
neural network) z wewnętrzną strukturą geometryczną w której
neurony ułożone są w kształcie prostokąta. Położenie każdego neuronu
w sieci opisane jest za pomocą dwóch indeksów (i,j), które określają
numer wiersza i kolumny (rys.).
Sieci komórkowe do planowania trasy dla robota
mobilnego
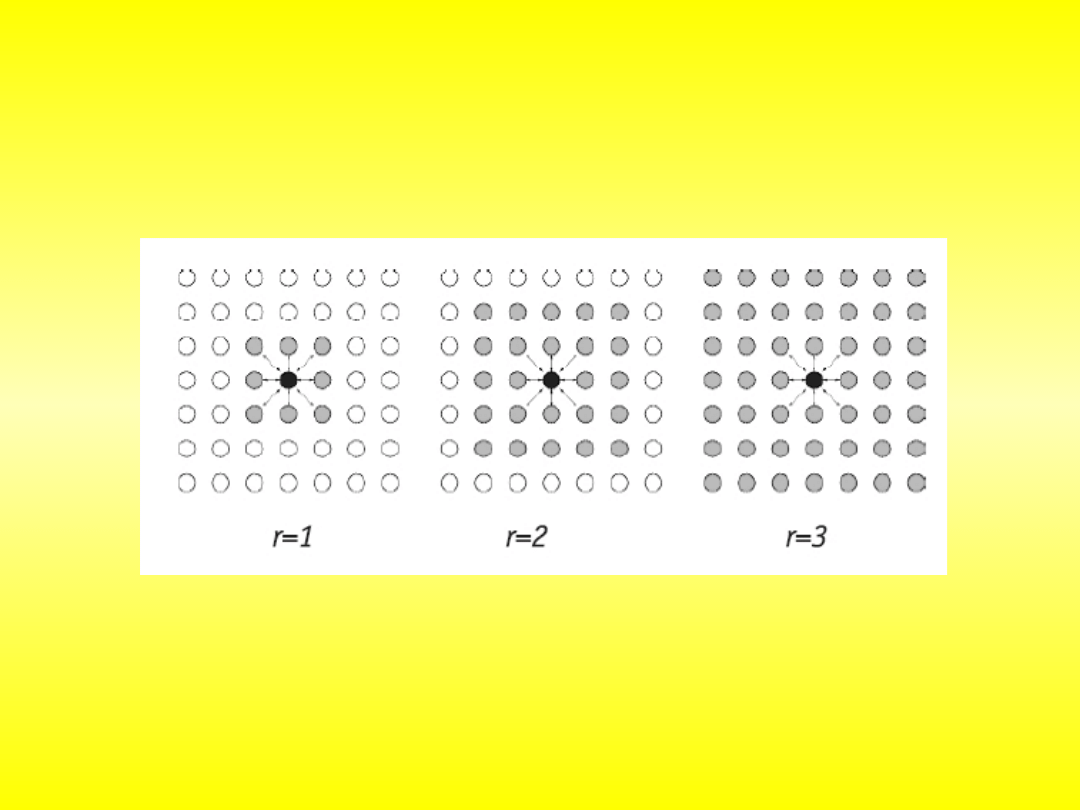
W sieciach komórkowych połączenia synaptyczne łączą każdy neuron
jedynie z neuronami leżącymi w jego sąsiedztwie r: dla r = 1 każdy neuron
ma 8 sąsiadów, a dla r = 2 – 24 sąsiadów (rys.). Podstawową cechą sieci
komórkowych jest to, że układ połączeń synaptycznych w obrębie
sąsiedztwa jest identyczny dla każdego neuronu.
W metodzie automatycznego planowania trasy przejazdu robota mobilnego,
zaproponowano następujący algorytm wykorzystujący sieć komórkową:
I.
Otoczenie robota dzielone jest na podobszary w kształcie kwadratu.
Każdej z komórek przypisana zostaje odpowiednia etykieta: “wolna” lub
“zajęta”.
II.
Otoczenie to reprezentowane jest przez sieć komórkową, w której
każda komórka odpowiada jednemu kwadratowi przestrzeni.
II.
Dwie komórki sieci są ze sobą połączone, jeśli odpowiadające im
obszary stykają się ze sobą, tzn. sąsiedztwo r = 1.
IV.
Tworzona jest mapa dyfuzyjna:
a) Inicjalizacja sieci – ustalenie wartości wag połączeń między sąsiadującymi
komórkami sieci, zgodnie ze wzorem:
)
,
(
kl
ij
kl
ij
c
c
dist
a
gdzie:, to odpowiednie komórki mapy, - waga łącząca komórkę z .
b) Wagi połączeń między komórkami są proporcjonalne do odległości
euklidesowej między środkami odpowiadających komórkom obszarów, tzn.
wynoszą 1 lub .
Ustalenie wartości sygnałów zewnętrznych =
0 gdy komórka jest fragmentem przeszkody,
1 gdy komórka jest wolna.
c) Ustalenie początkowej wartości komórek =
T>>1, gdy komórka reprezentuje cel,
0, w przeciwnym przypadku
gdzie: T jest wartością początkową komórki reprezentującej cel.
ij
c
kl
ij
a
ij
c
kl
c
2
ij
u

d) Proces dyfuzji – stan komórki w chwili (t+1) obliczany jest zgodnie
z zależnością:
)
)
(
max(
),
(
max
)
(
)
1
(
ij
kl
kl
ij
ij
ij
a
t
x
t
x
t
u
t
x
Proces dyfuzji kontynuowany jest, aż do osiągnięcia przez sieć stanu
równowagi, gdy:
)
0
(
)
1
(
t
x
t
x
ij
ij
Postać mapy dyfuzyjnej (rys. 6.15) uzyskanej przy zastosowaniu
powyższego algorytmu nie zależy od położenia robota, a jedynie od
położenia celu i przeszkód. W sytuacji, w której cel lub robot jest
otoczony przez przeszkody, stan komórki zajętej przez robota po
uzyskaniu przez sieć stanu równowagi wynosi zero. W pozostałych
przypadkach optymalna trasa, którą powinien poruszać się robot aby
dojechać do celu, składa się z obszarów uzyskanej mapy dyfuzyjnej o
rosnącej wartości odpowiadających komórek, tzn. robot powinien w
każdej chwili przemieszczać się do sąsiedniego obszaru o największej
wartości.
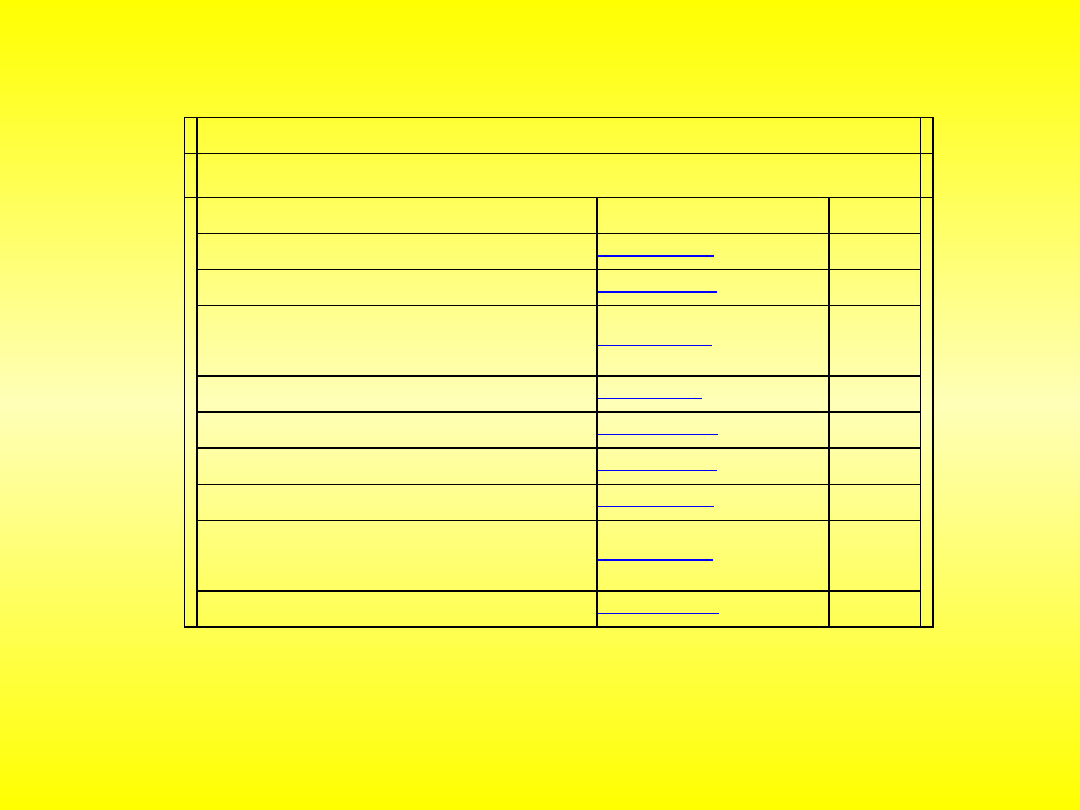
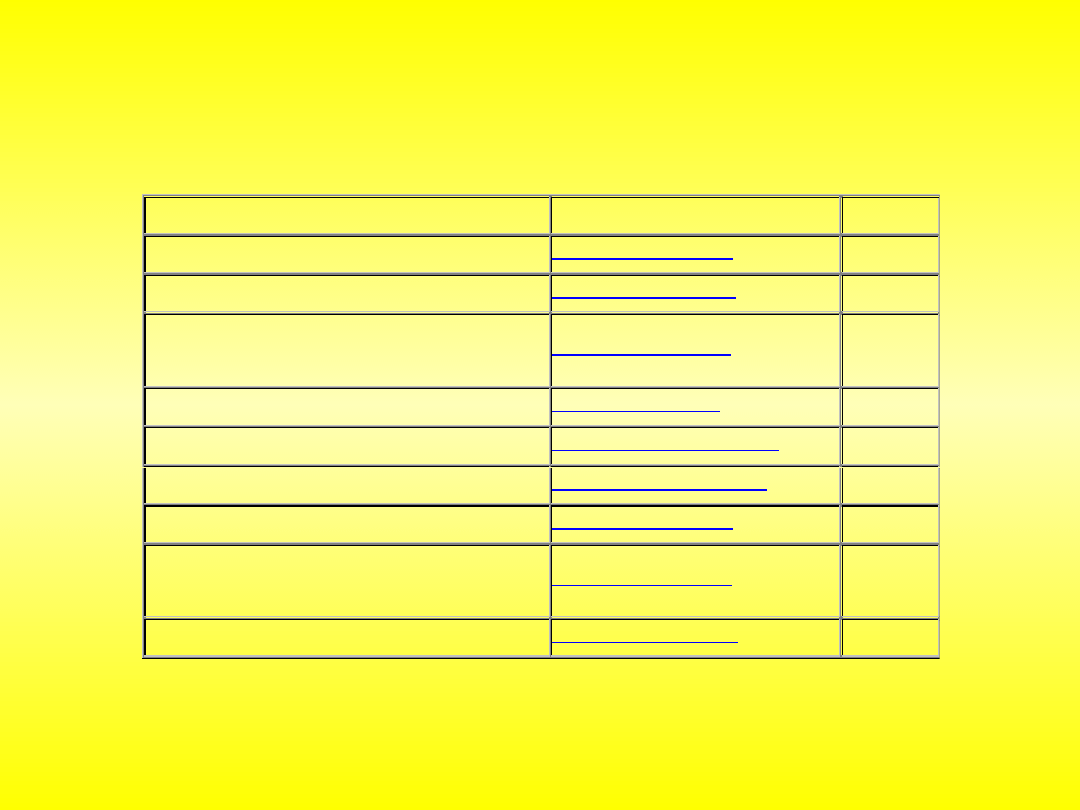
Programy w wersjach bez instalatora i bibliotek
Nazwa programu
Nazwa pliku
Wielkość
Sieci neuronowe ART
SN_ART.exe
1.18 MB
Sieci neuronowe BAM
SN_BAM.exe
1.18 MB
Sieci
neuronowe
jednokierunkowe
BackPropagation + modyfikacje
SN_BP+.exe
1.23 MB
Sieci neuronowe CounterPropagation
SN_CP.exe
1.19 MB
Sieci neuronowe Hamminga
SN_HAM.exe
1.18 MB
Sieci neuronowe Hopfielda
SN_HOP.exe
1.18 MB
Sieci neuronowe RBF
SN_RBF.exe
1.29 MB
Sieci neuronowe jednokierunkowe z alg.
RLS
SN_RLS.exe
1.21 MB
Sieci neuronowe Kohonena - SOM
SN_SOM.exe
1.2 MB
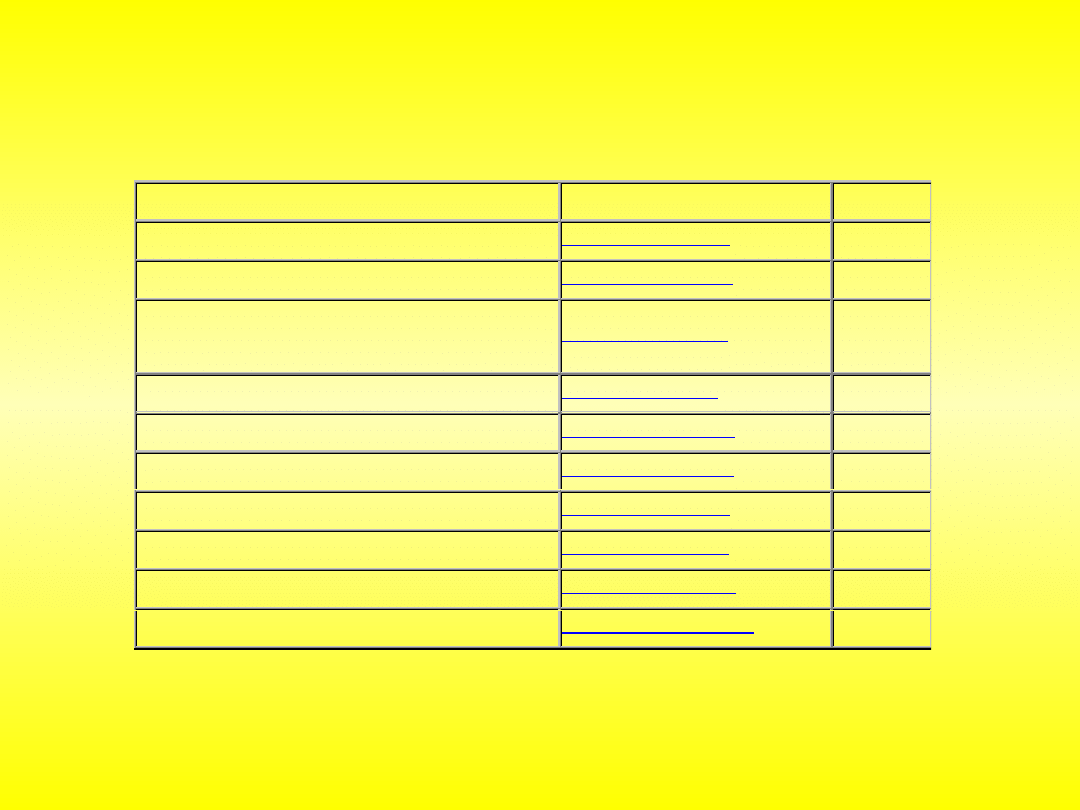
Programy w wersjach instalacyjnych z bibliotekami
Nazwa programu
Nazwa pliku
Wielkość
Sieci neuronowe ART
setup_SN_ART.exe
5.82 MB
Sieci neuronowe BAM
setup_SN_BAM.exe
6.36 MB
Sieci
neuronowe
jednokierunkowe
BackPropagation + modyfikacje
setup_SN_BP+.exe
6.37 MB
Sieci neuronowe CounterPropagation
setup_SN_CP.exe
6.36 MB
Sieci neuronowe Hamminga
setup_SN_Hamming.exe
6.36 MB
Sieci neuronowe Hopfielda
setup_SN_Hopfield.exe
6.36 MB
Sieci neuronowe RBF
setup_SN_RBF.exe
6.42 MB
Sieci neuronowe jednokierunkowe z alg.
RLS
setup_SN_RLS.exe
6.37 MB
Sieci neuronowe Kohonena - SOM
setup_SN_SOM.exe
6.37 MB
Kody źródłowe programów
Nazwa programu
Nazwa pliku
Wielkość
Sieci neuronowe ART
SN_code_ART.zip
213 KB
Sieci neuronowe BAM
SN_code_BAM.zip
184 KB
Sieci
neuronowe
jednokierunkowe
BackPropagation + modyfikacje
SN_code_BP+.zip
225 KB
Sieci neuronowe CounterPropagation
SN_code_CP.zip
203 KB
Sieci neuronowe Hamminga
SN_code_HAM.zip
206 KB
Sieci neuronowe Hopfielda
SN_code_HOP.zip
216 KB
Sieci neuronowe RBF
SN_code_RBF.zip
220 KB
Sieci neuronowe jednokierunkowe z alg. RLS
SN_code_RLS.zip
219 KB
Sieci neuronowe Kohonena - SOM
SN_code_SOM.zip
217 KB
Źródła wszystkich programów
SN_paczka_code.zip
1.90 MB
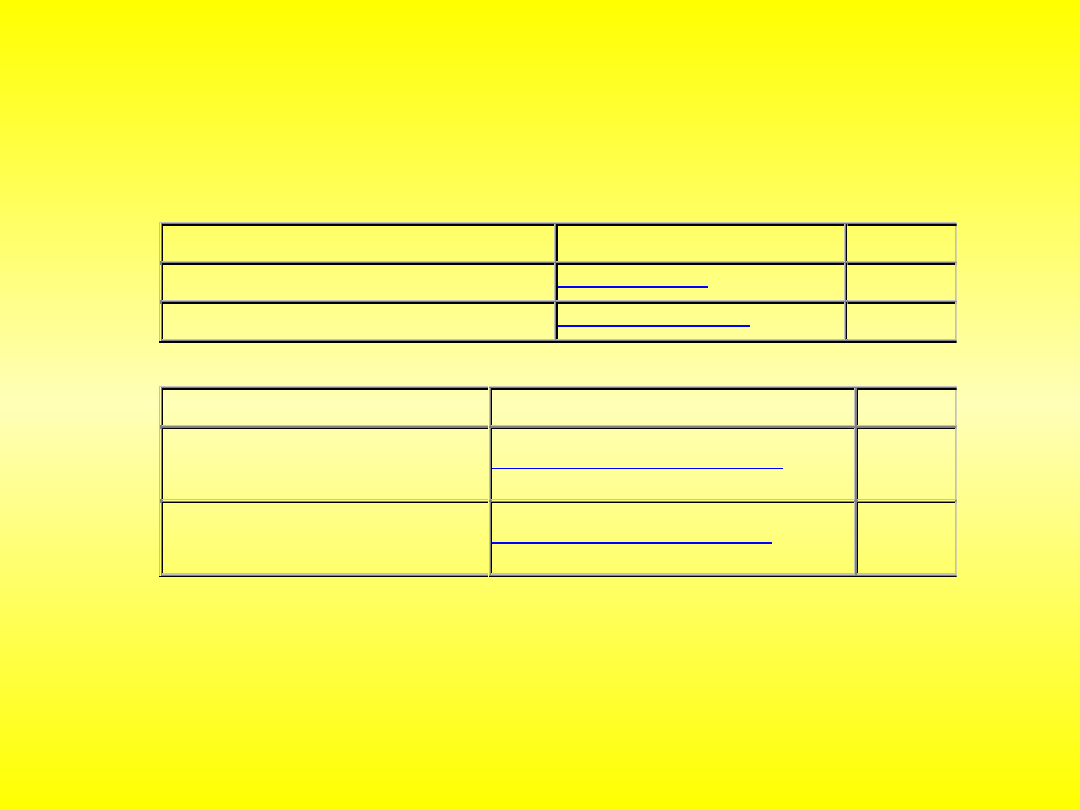
Biblioteki i dane uczące
Nazwa programu
Nazwa pliku
Wielkość
Biblioteki Borland Delphi 7
SN_biblioteki.zip
1.86 MB
Dane uczące
SN_dane_uczace.zip
8 kB
Zestawy wszystkich programów
Nazwa programu
Nazwa pliku
Wielkość
Zestaw wszystkich programów z
bibliotekami
SN_paczka_(z_bibliotekami).zip
6.41 MB
Zestaw wszystkich programów bez
bibliotek
SN_paczka_(bez_bibliotek).zip
4.55 MB
- na wejście neuronów konkurujących podajemy wektor x
- na podstawie sygnałów s
i
wyłaniany jest zwycięzca neuron i*, dla którego
wartość ta jest największa:
۰ działanie:
- przyjmuje on stan 1, co umożliwia mu aktualizację dochodzących do niego wag
- neurony przegrywające – stan 0, co uniemożliwia im aktualizację dochodzących
do nich wag
- aktualizacja wag zwycięzcy dokonuje się na podstawie reguły Kohonena:
k
w
x
c
k
w
k
w
ij
j
ij
ij
1
- podajemy na wejście kolejny wektor uczący

reguła gwiazdy wyjść (outstar) i gwiazdy wejść (intstar)
۰ dopasowuje wagi neuronu do swoich sygnałów wejściowych
k
w
x
cy
k
w
k
w
ij
j
i
ij
ij
1
۰ uczenie zgodnie z regułą Grossberga:
c - stała uczenia, zazwyczaj z (0,1)
- gdy c=1 zapominanie wcześniej nauczonej wartości
- gdy c<1 wagi przyjmują uśrednione wartości dla wektorów uczących x
k
w
y
cy
k
w
k
w
ij
j
i
ij
ij
1
Instar
Outstar
۰ uczenie: dobór wag, aby sygnały wyjściowe outstara były równe
pożądanym przez neurony z nim współpracujące, czyli:
۰ tryb odtworzeniowy:
x = w y = 1
x prostopadły do w y = 0
۰ tryb odtworzeniowy: aktywacja neuronu źródłowego powoduje
wysłanie przez outstara pożądanego sygnału
۰ Instar, Oustar: możliwe uczenie z nauczycielem i bez

uczenie typu konkurencyjnego
WTA – Winner Takes All:
tylko jeden neuron może być aktywny, pozostałe – w spoczynku
۰ neurony współzawodniczą ze sobą, aby stać się aktywnymi
WTA
۰ x
j
– sygnały podawane na wejściu – takie same dla wszystkich neuronów
współzawodniczących
۰ zwycięzcą jest neuron, którego sygnał sumacyjny s
i
jest najwyższy
۰ zwycięzca: y
i
= 1, pozostałe neurony 0
WTM – Winner Takes Most:
neuron wygrywający konkurencję uaktywnia się w sposób maksymalny
i umożliwia częściowe uaktywnienie neuronów z nim sąsiadujących
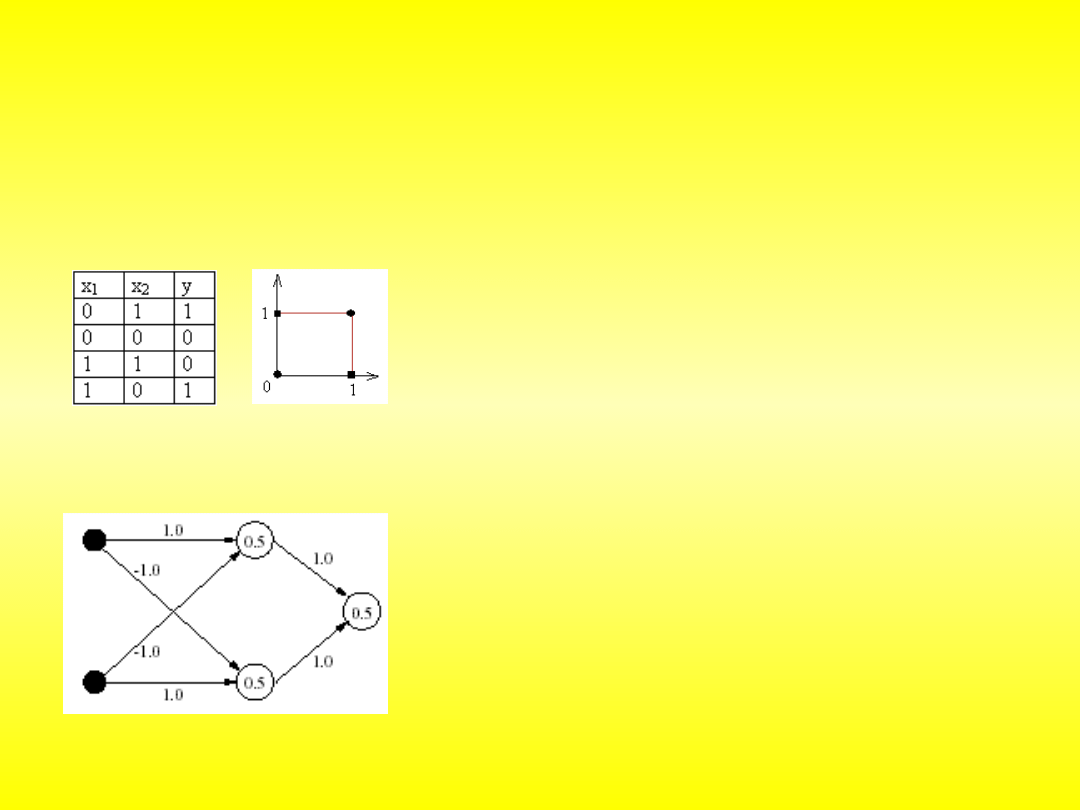
Problem XOR
۰ przykład odwzorowania, którego realizacji nie można przeprowadzić
za pomocą jednowarstwowej sieci
۰ najmniej podobne do siebie konfiguracje powinny
generować na wyjściu identyczne wartości
۰ problem rozwiązuje dodanie warstwy ukrytej:
- umożliwia ona tworzenie wewnętrznej
reprezentacji wejściowych danych
- podobieństwo stworzone przez neurony warstwy
ukrytej stanowi wystarczające uzupełnienie,
umożliwia właściwego przyporządkowanie
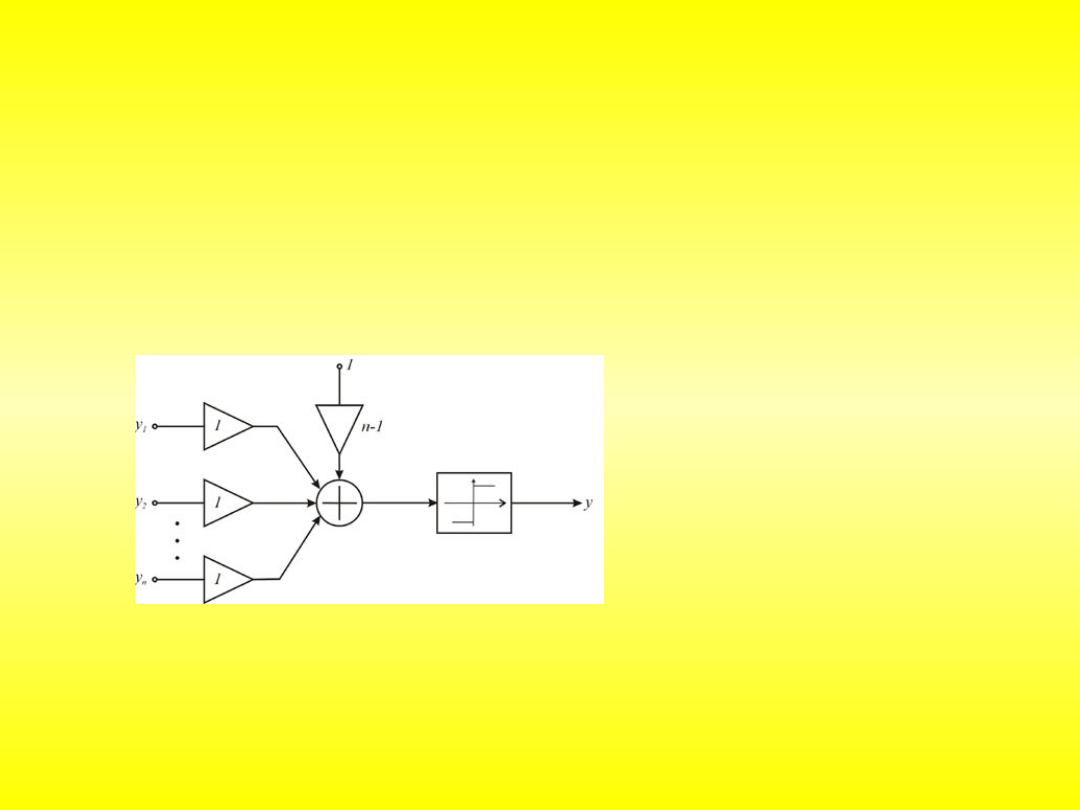
Najbardziej znane modele neuronów
Perceptron
Sigmoidalny
Adaline (ADAptive LInear NEuron)
sieć typu or: n-1 y = 1, gdy choć jeden sygnał wejściowy y
i
ma wartość 1
sieć typu and: 1-n y = 1, gdy wszystkie sygnały wejściowe y
i
mają wartość 1
sieć typu majority: 0 y = 1, gdy choć większość sygnałów wejściowych y
i
ma wartość 1
Madaline (Many ADAptive Linear NEuron)

۰ uogólnienie - dla neuronów dyskretnych i ciągłych
reguła Widrowa-Hoffa
۰ korekcja wag wg wzoru:
k
w
k
w
k
w
ij
ij
ij
1
k
y
k
d
k
x
k
w
i
i
j
ij
, gdzie
obie wymienione reguły: wykorzystują jedynie informację o aktualnej wartości
sygnału wyjściowego neuronu oraz wartości zadanej tegoż sygnału
reguła delta
x
s
f
y
d
c
k
w
k
w
i
i
i
ij
ij
|
1
c – stała uczenia
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
Wyszukiwarka
Podobne podstrony:
Projekt I Sztuczna Inteligencja, Sprawozdanie, Techniczne zastosowanie sieci neuronowych
PRACA PRZEJŚCIOWA Zastosowanie sieci neuronowych w zagadnieniu sterowania odwróconym wahadłem
Zastosowanie sieci neuronowych, giełda(3)
pierwszy, Sprawozdanie, Techniczne zastosowanie sieci neuronowych
ZASTOSOWANIE SIECI NEURONOWYCH W SYSTEMACH AKTYWNEJ REDUKCJI HAŁASU Z UWZGLĘDNIENIEM ZJAWISK O CHARA
Prońko, Rafał Zastosowanie sieci neuronowych do planowania i analizy kampanii reklamowej (2014)
Identyfikacja Procesów Technologicznych, Identyfikacja charakterystyki statycznej obiektu dynamiczne
Prognozowanie z zastosowaniem metod regresji krokowej, sieci neuronowych i modeli ARIMA
Prognozowanie z zastosowaniem metod regresji krokowej, sieci neuronowych i modeli ARIMA
MSI-program-stacjonarne-15h-2011, logistyka, semestr IV, sieci neuronowe w log (metody sztucznej int
Ontogeniczne sieci neuronowe skrypt(1)
04 Wyklad4 predykcja sieci neuronoweid 523 (2)
Pytania egz AGiSN, SiMR - st. mgr, Alg. i Sieci Neuronowe
MSI-ściaga, SiMR - st. mgr, Alg. i Sieci Neuronowe
32 Sieci neuronowe
sieci neuronowe, Sieci NeuronoweKolos
sztuczne sieci neuronowe sciaga
więcej podobnych podstron