Ground classification
Arttu Soininen
Ground classification
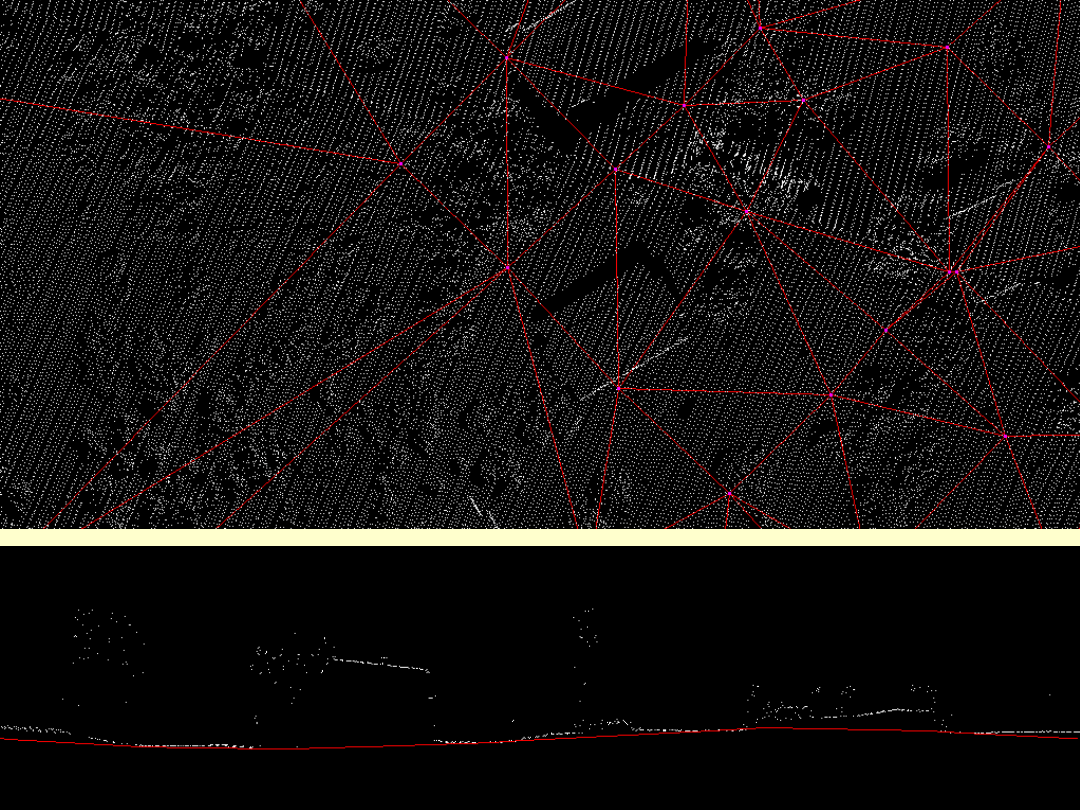
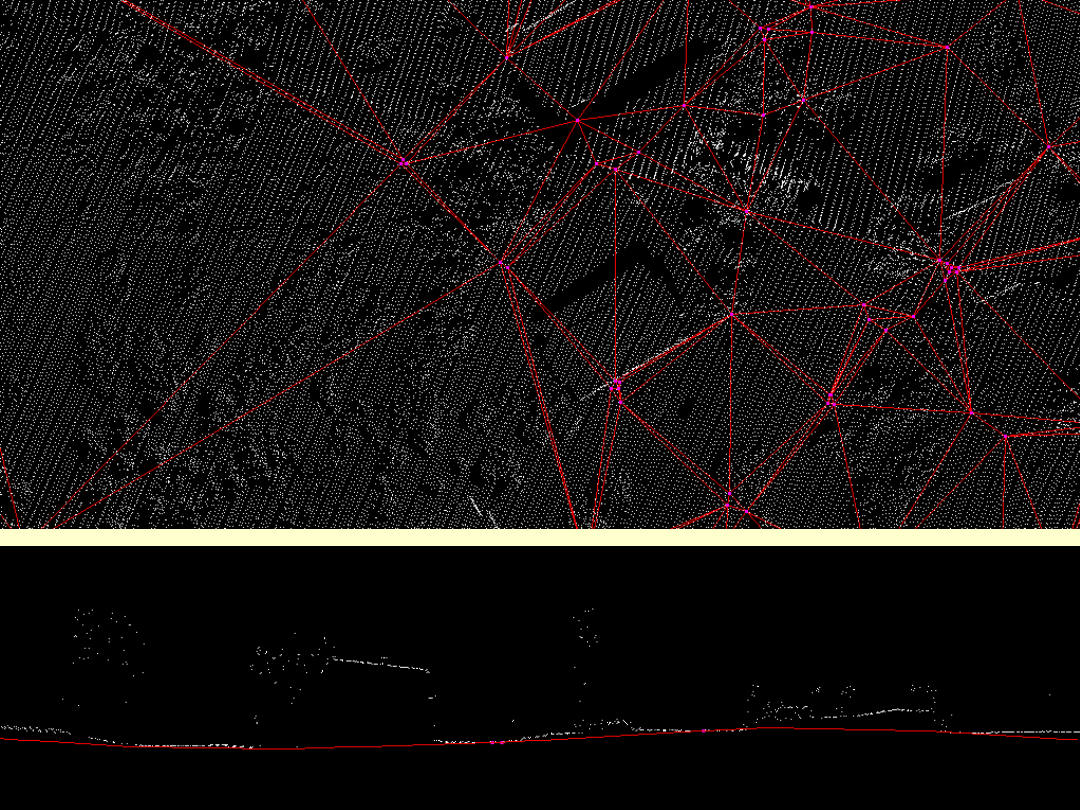
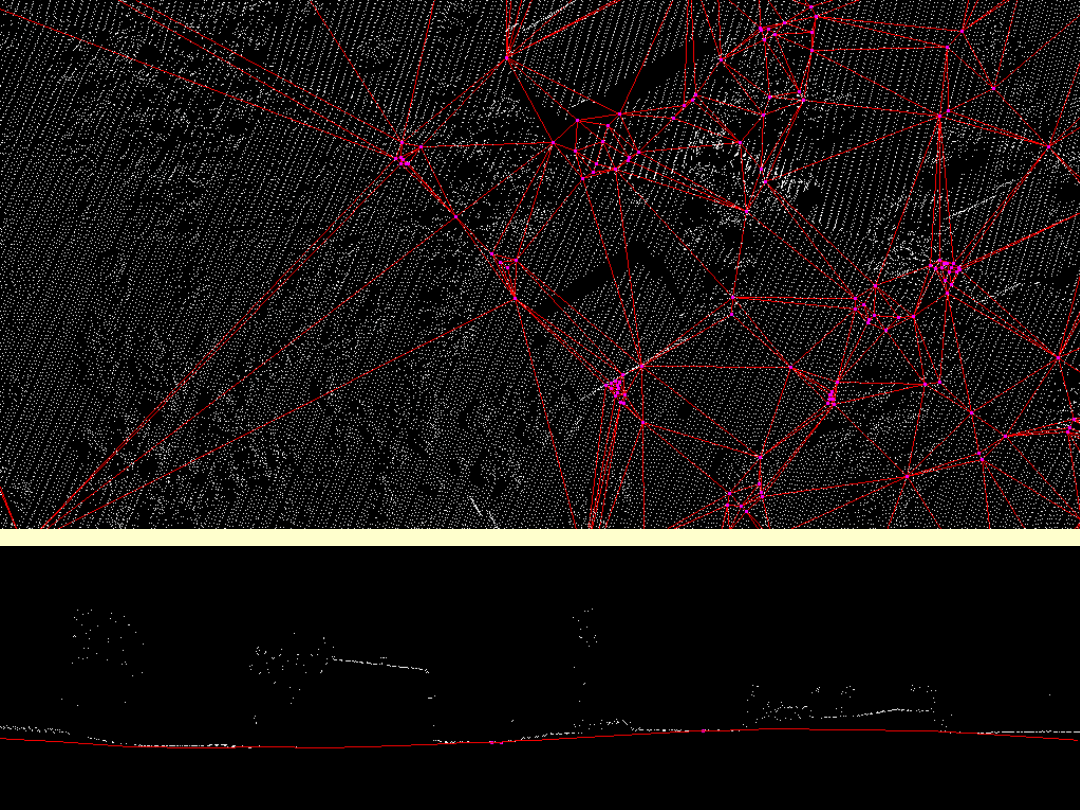
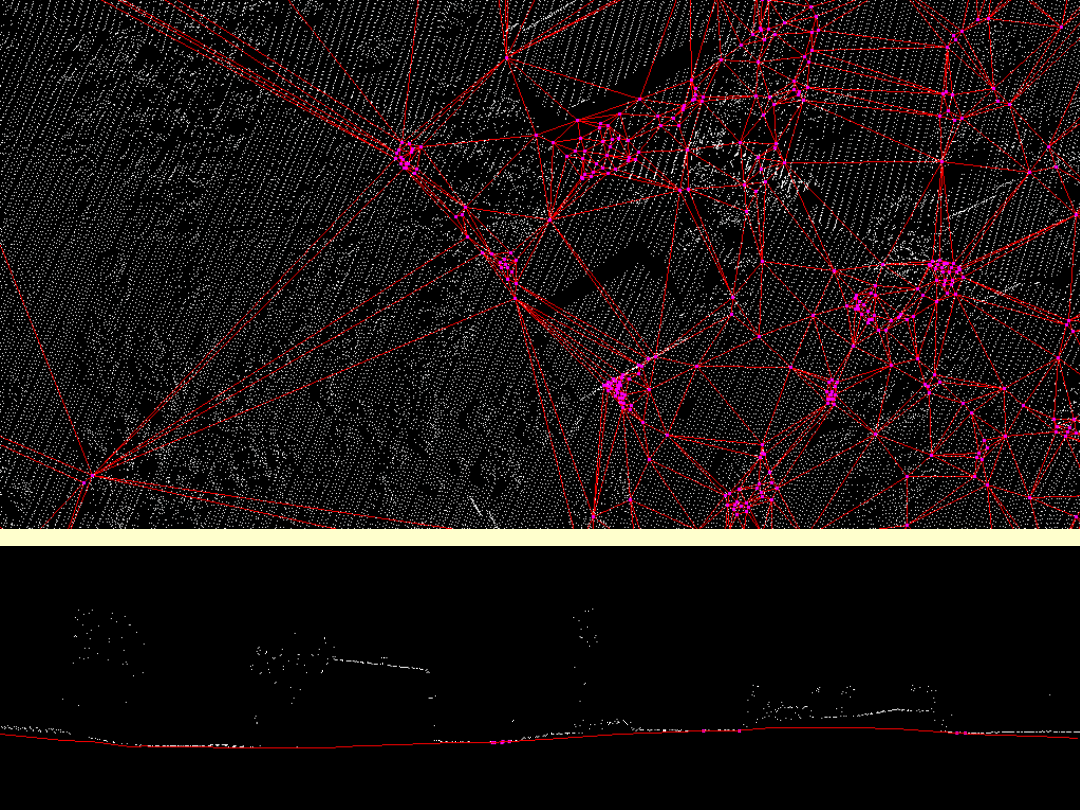
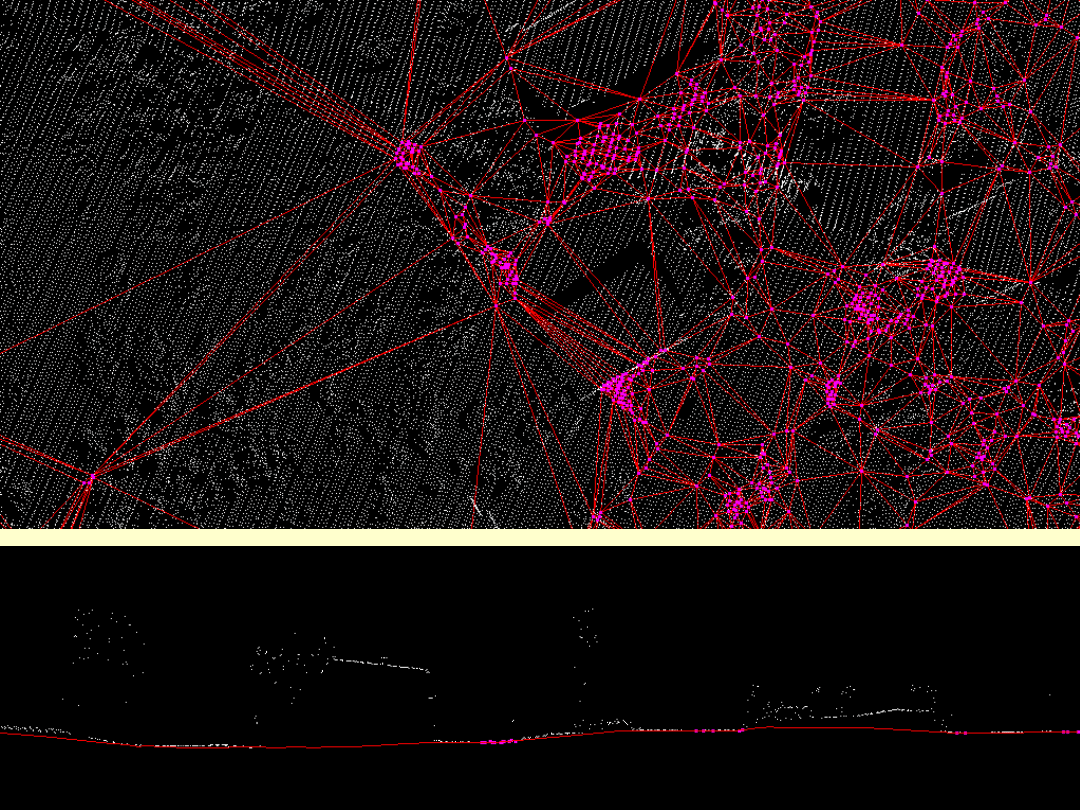
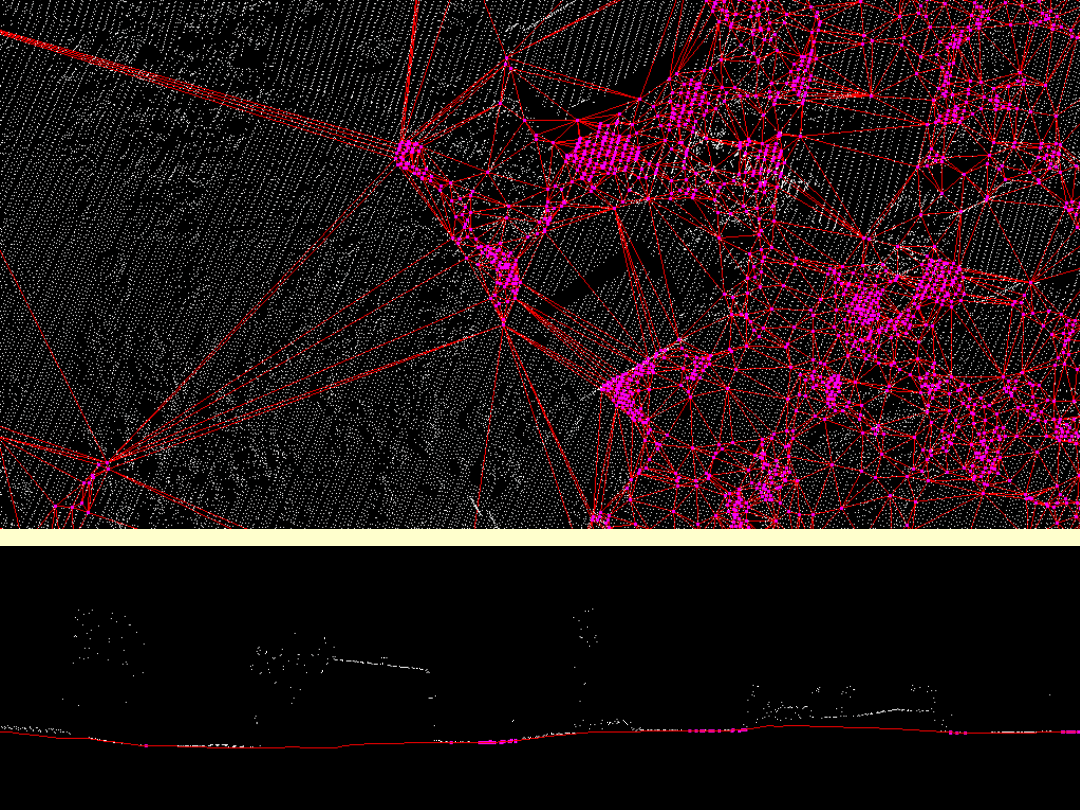
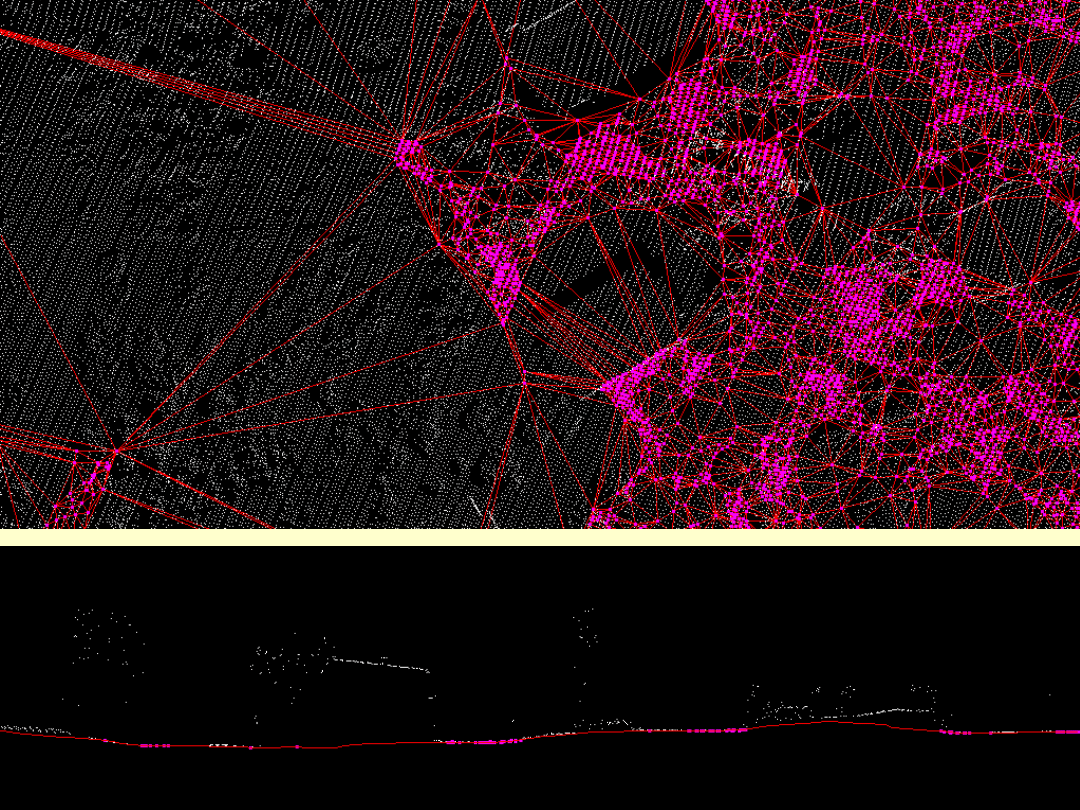
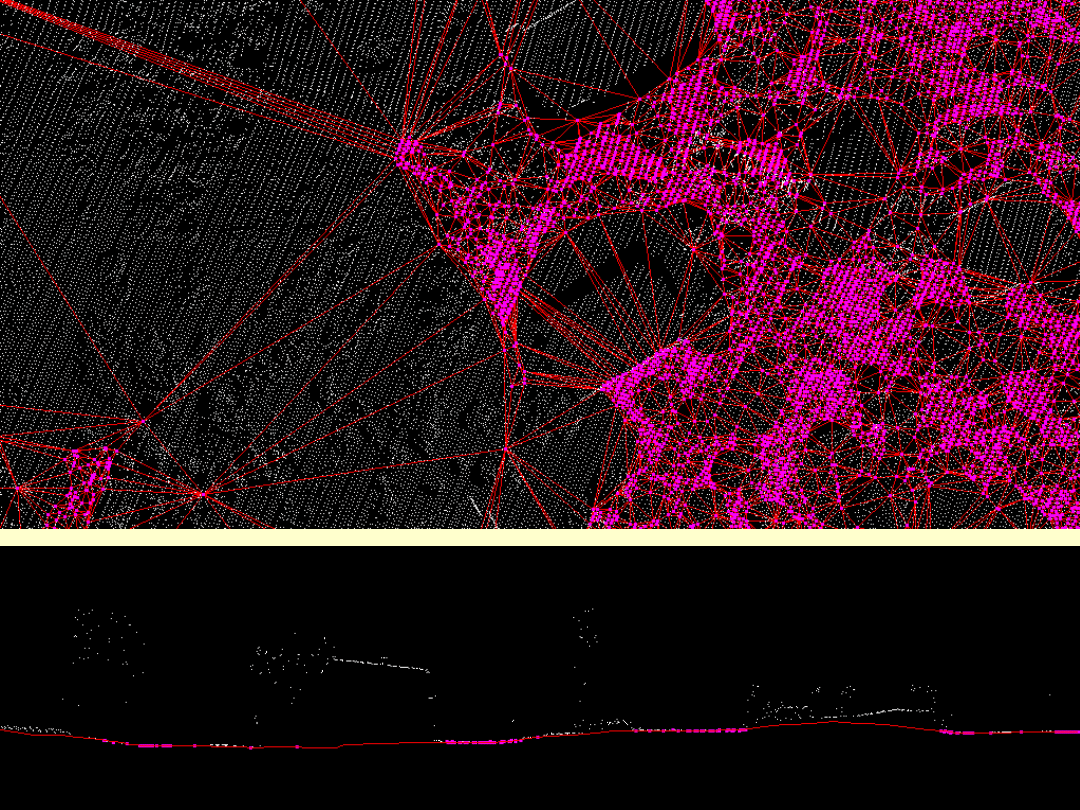
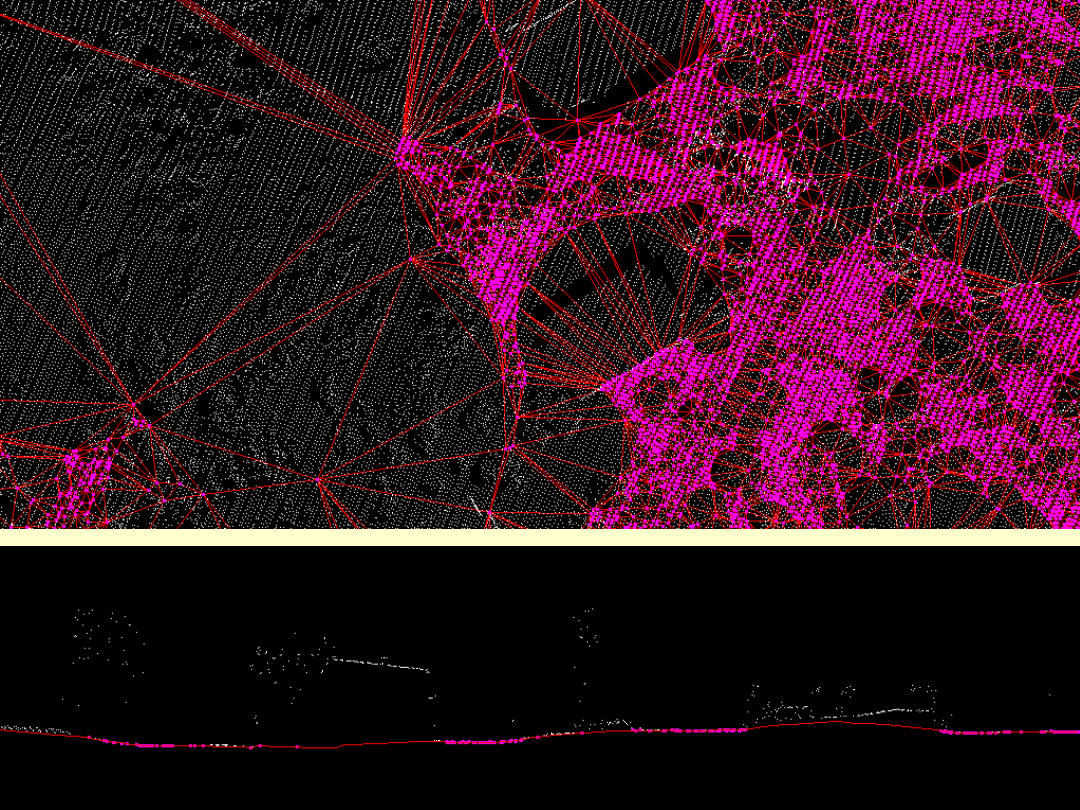
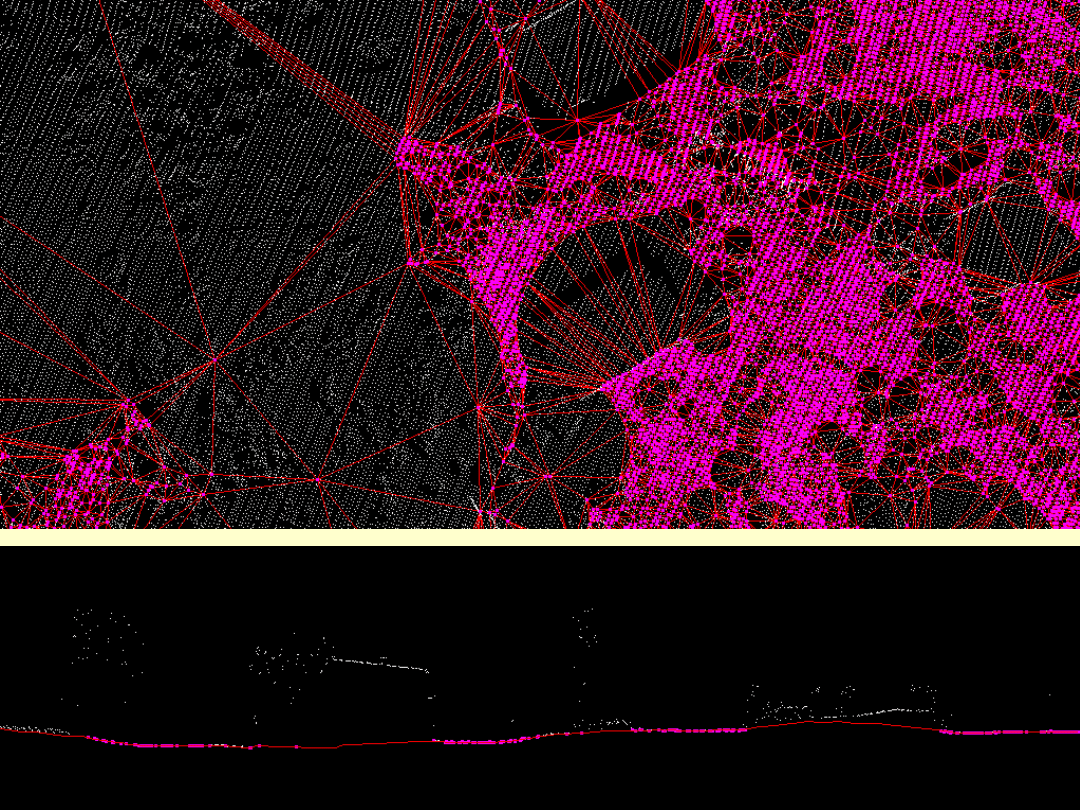
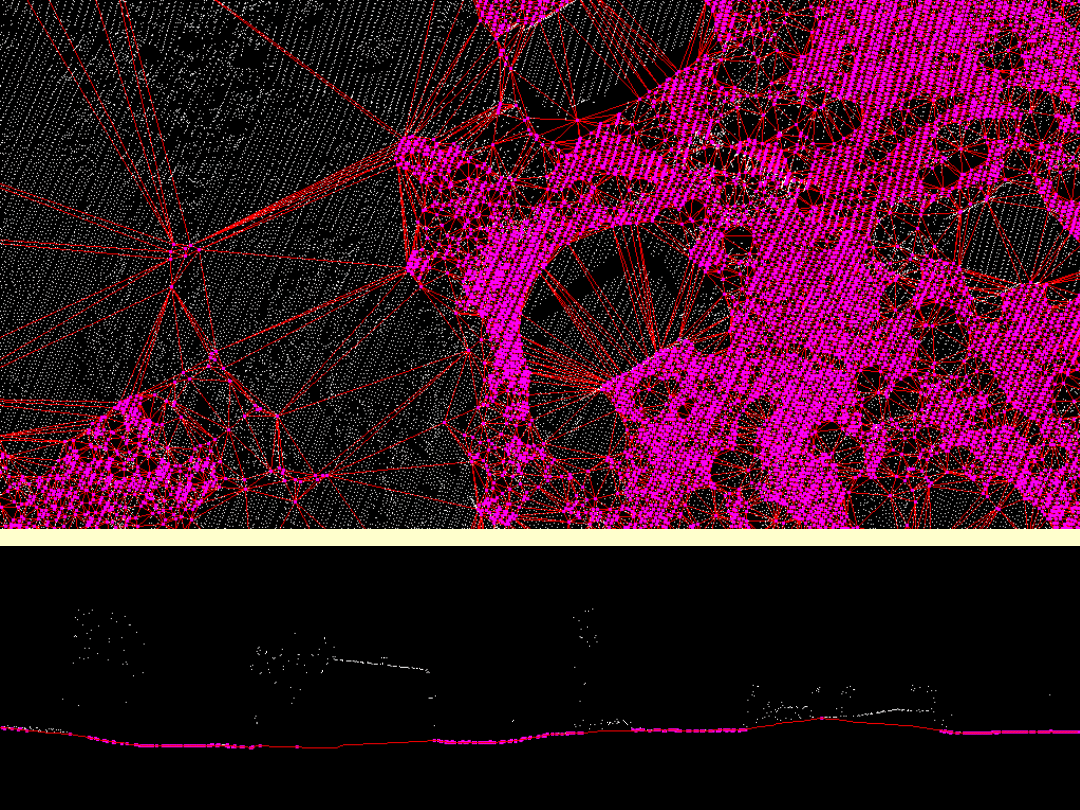
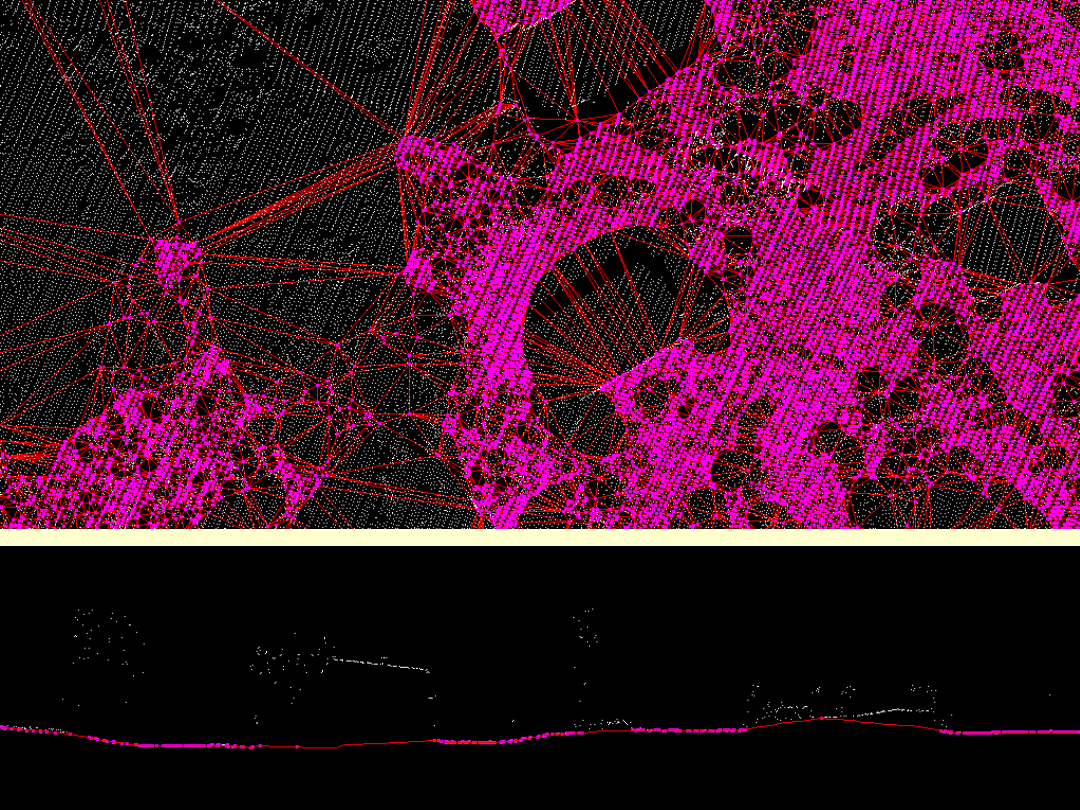
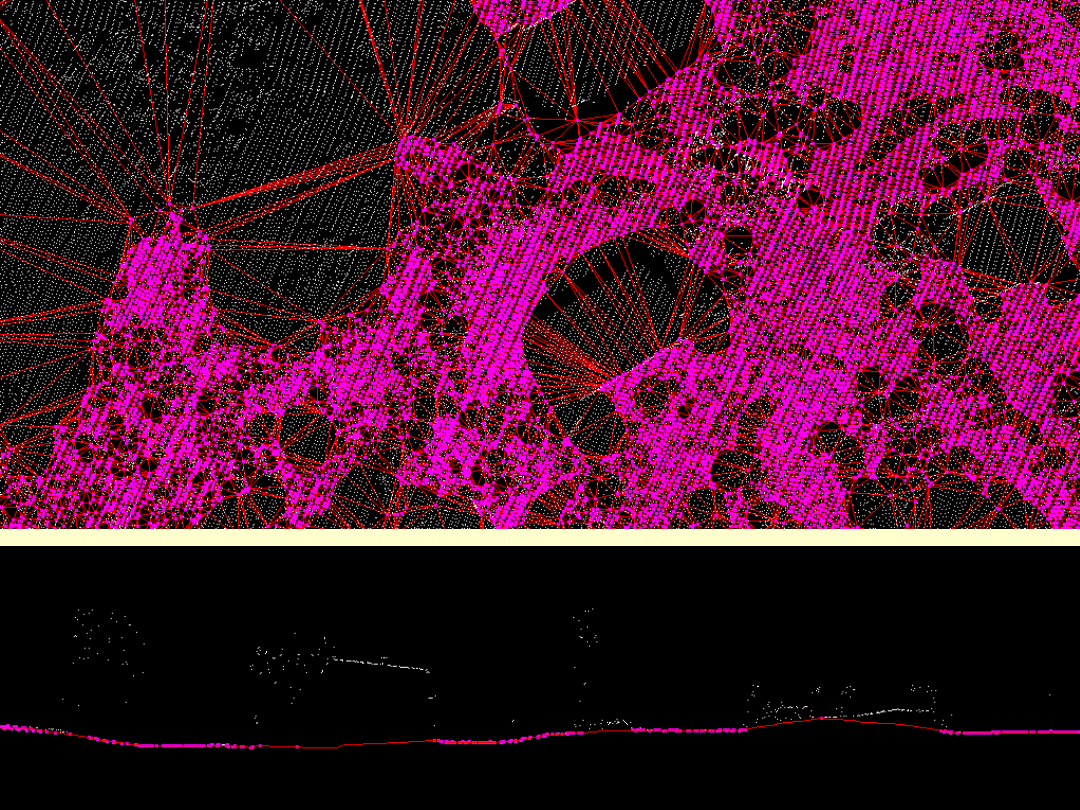
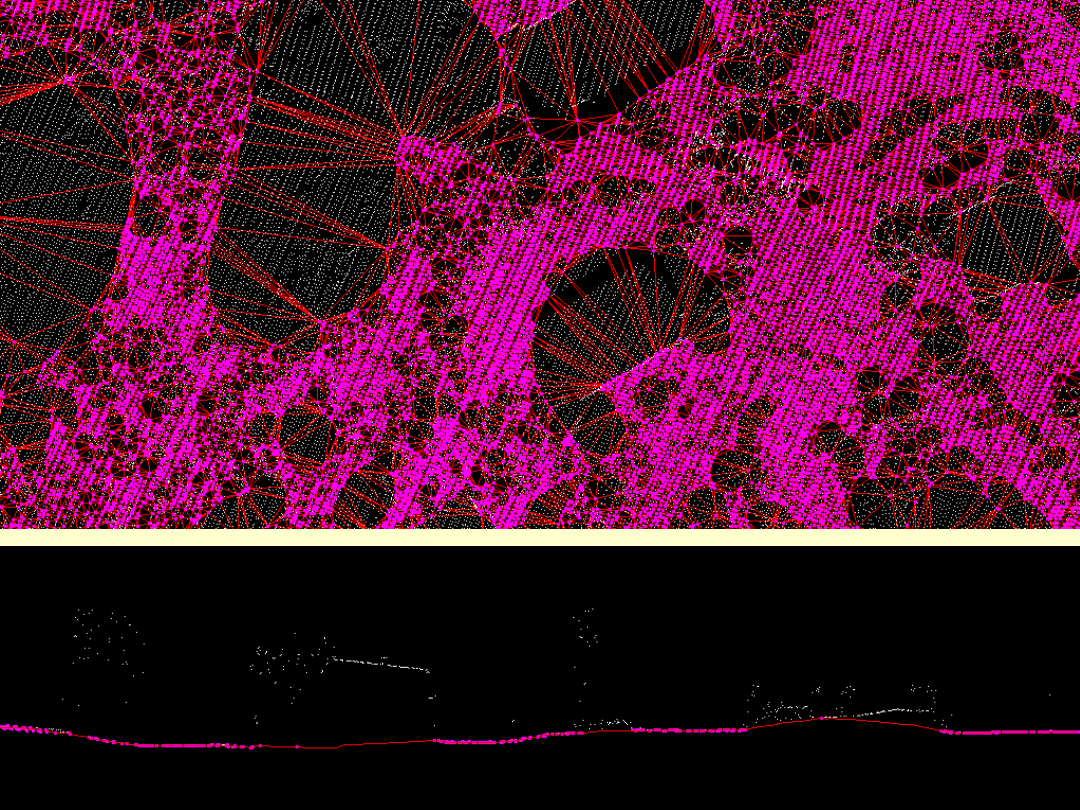
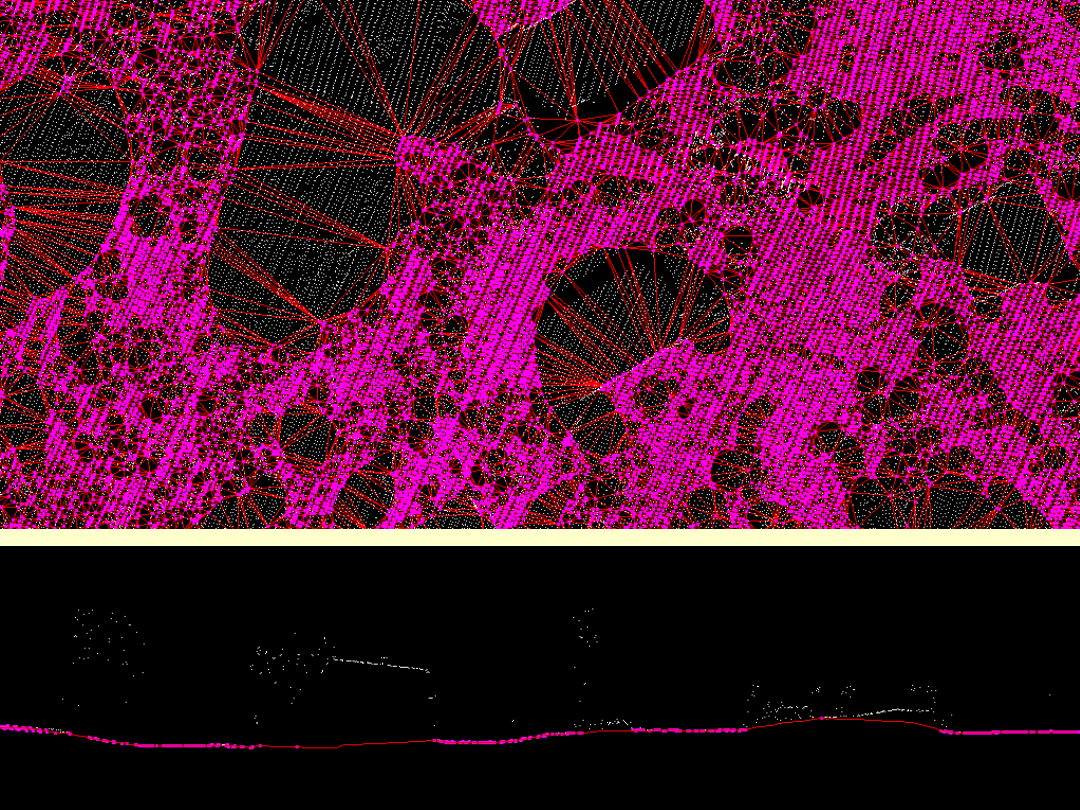
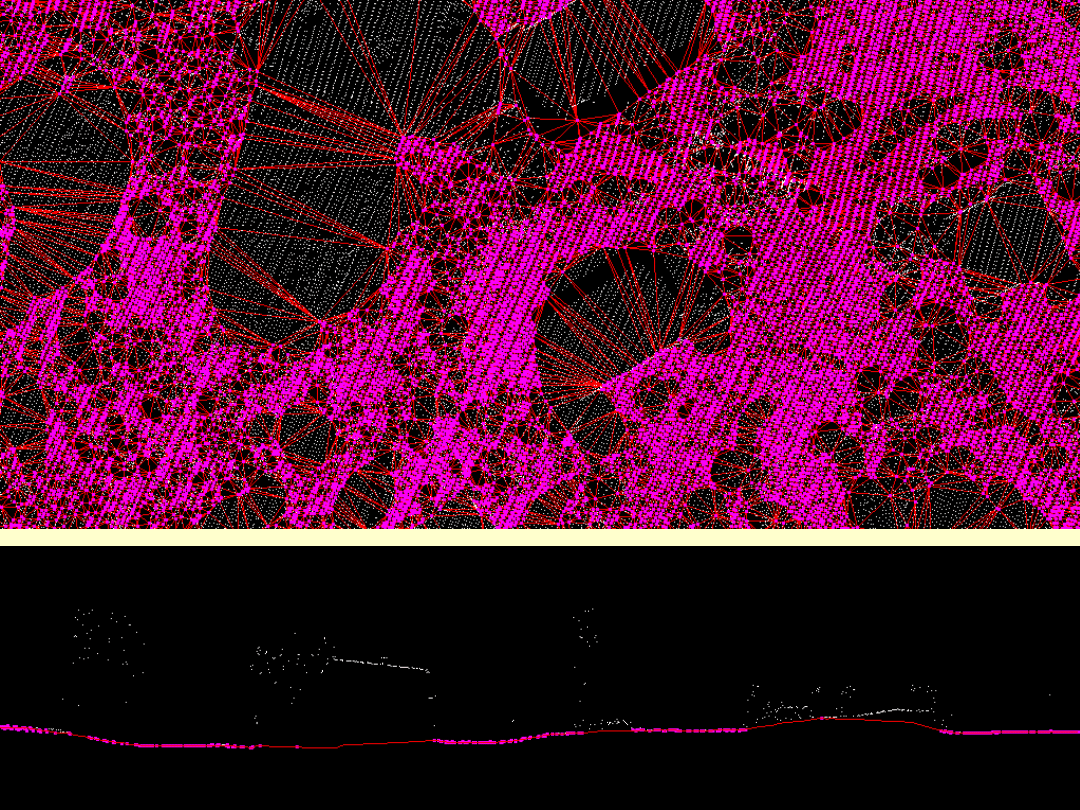
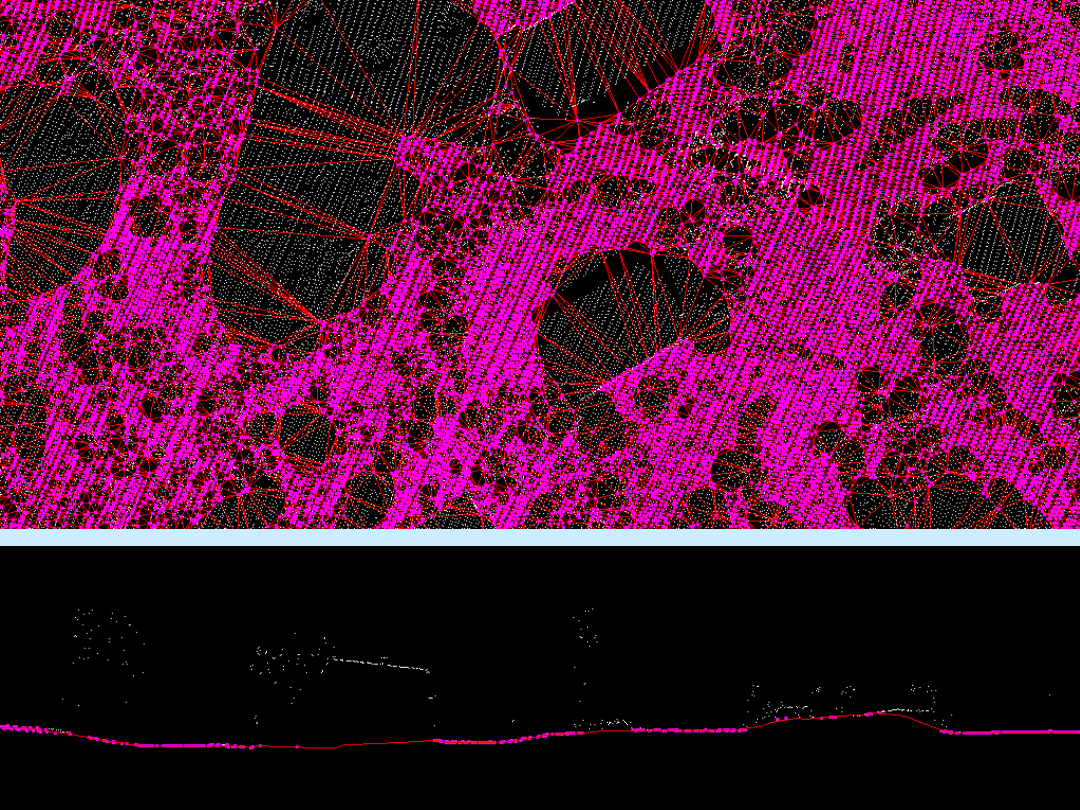
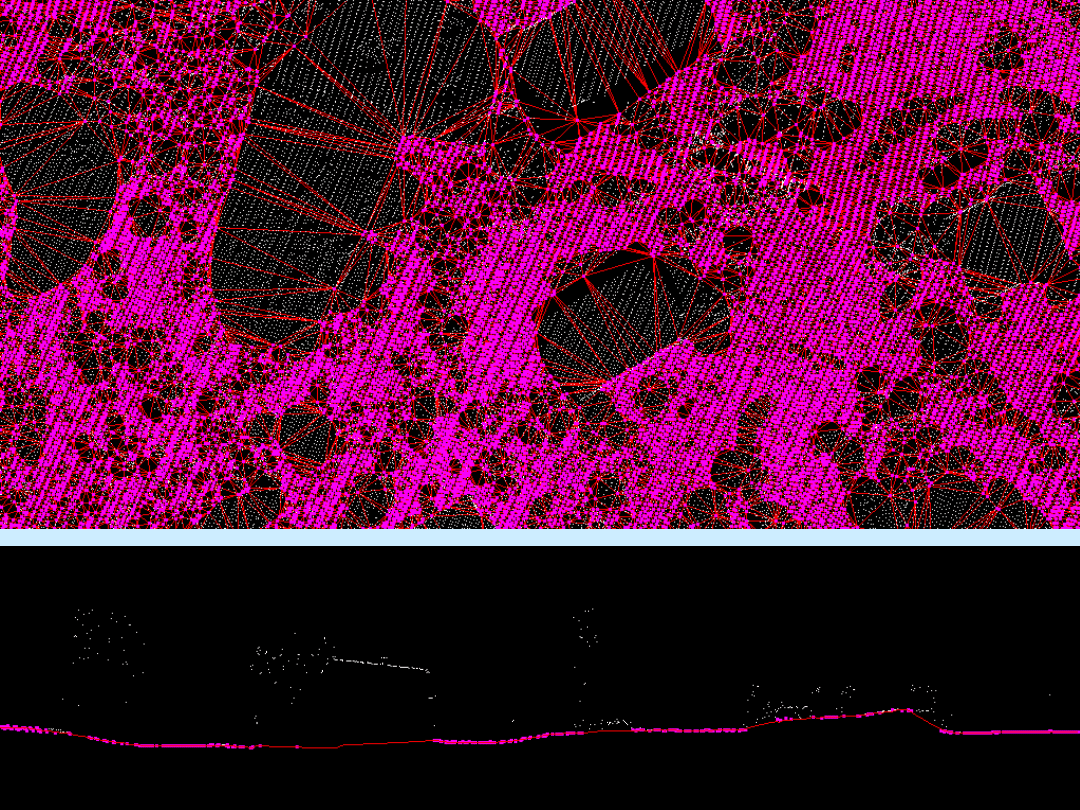
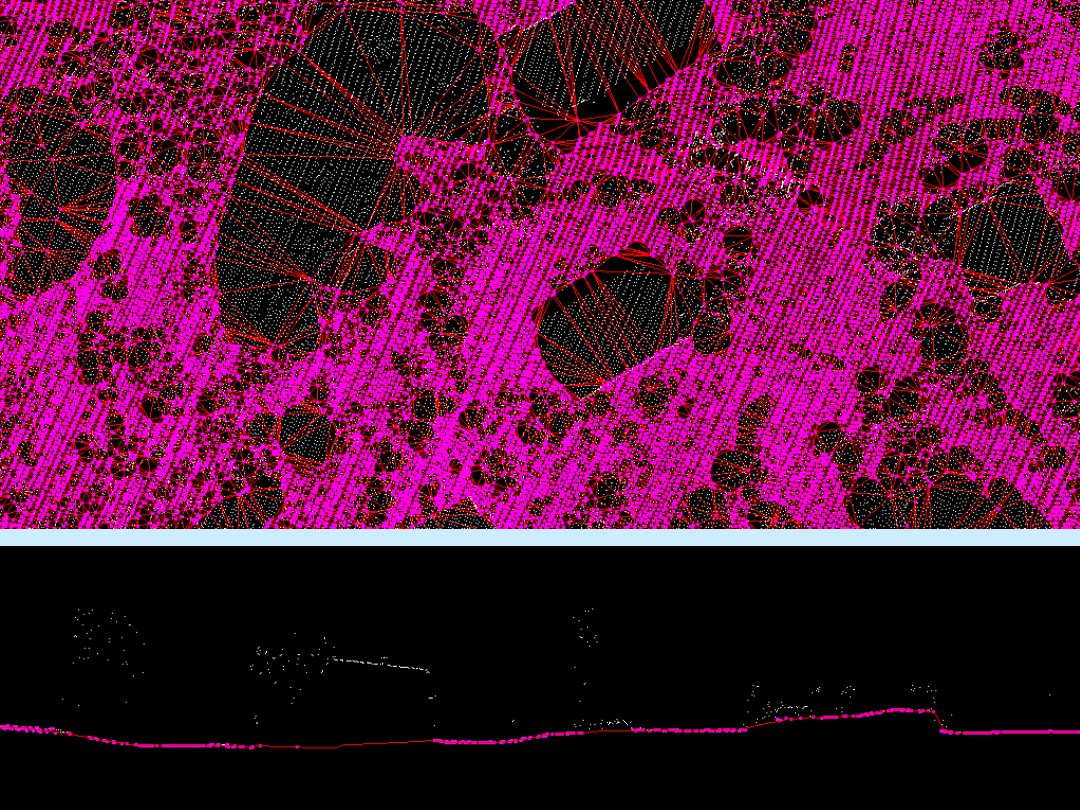
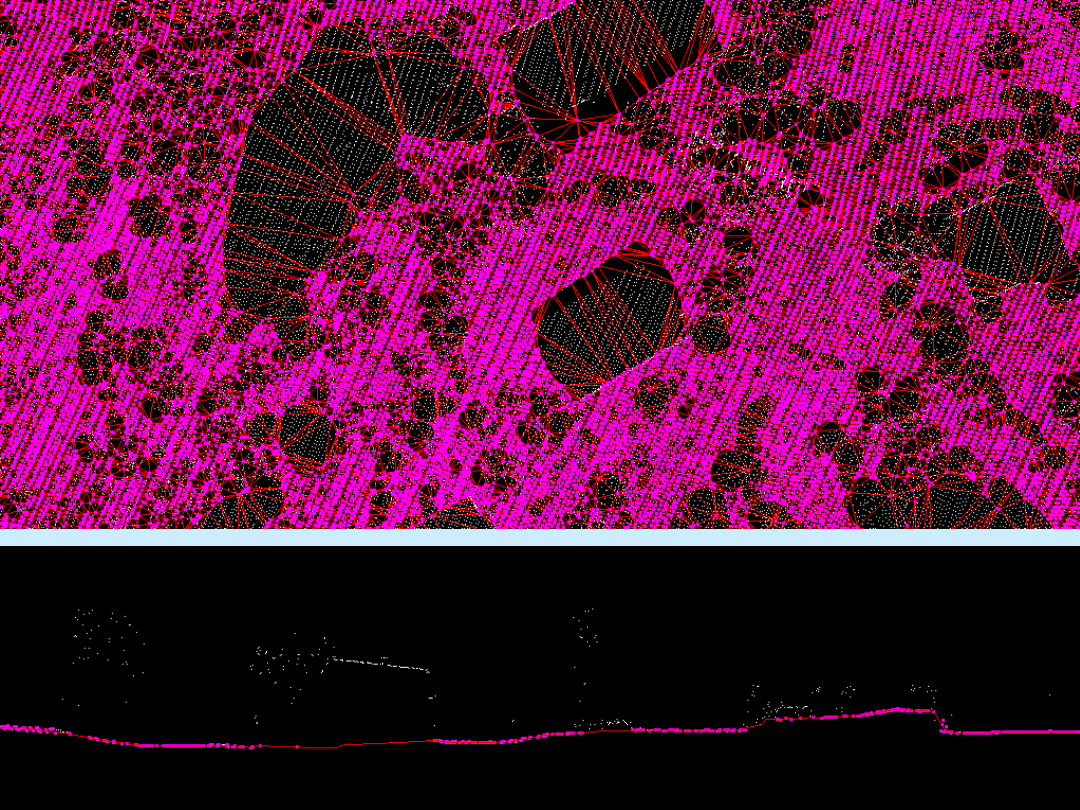
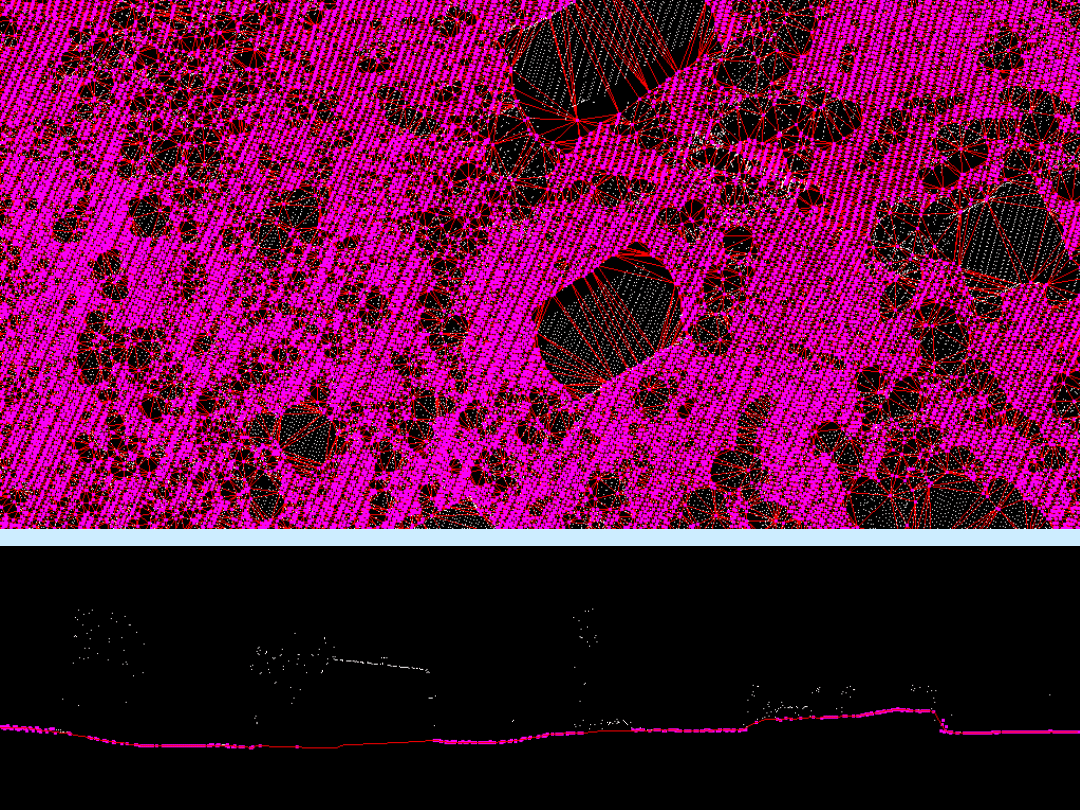
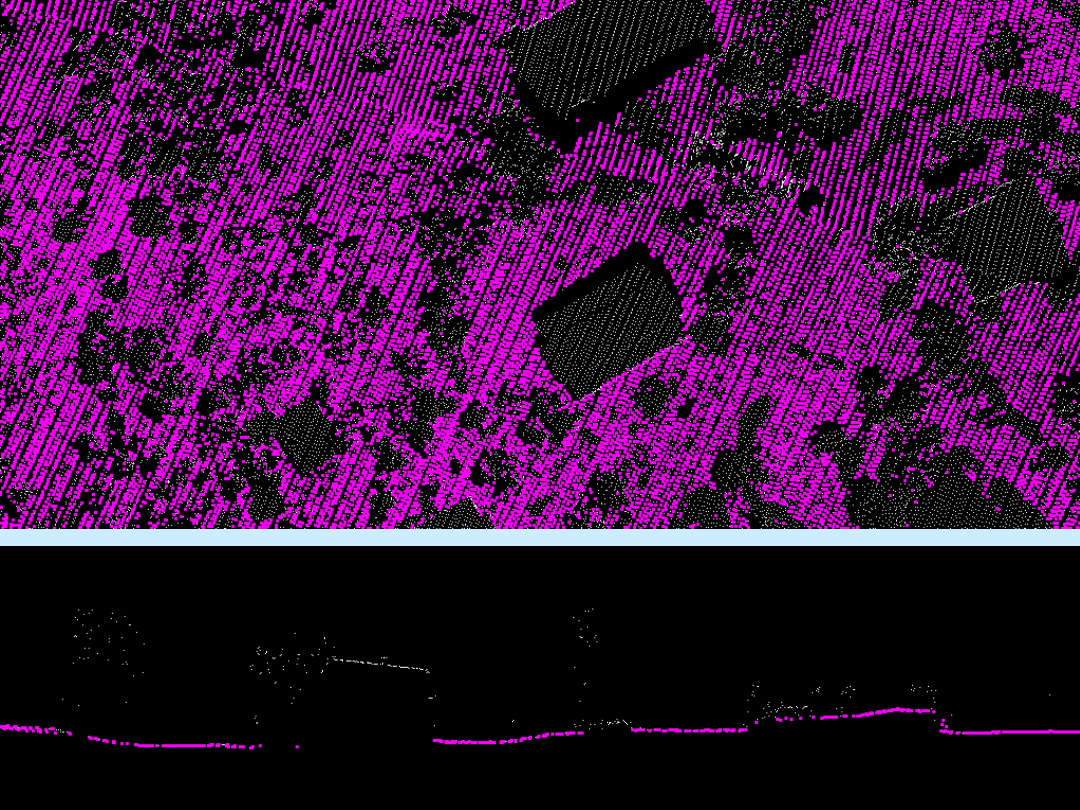
• Iterative process which builds a
triangulated model and molds it upwards
as long as it finds new points matching
iteration parameters
• Location becomes ground if the
application finds a smooth route to the top
• Location becomes ground if you can drive
onto it
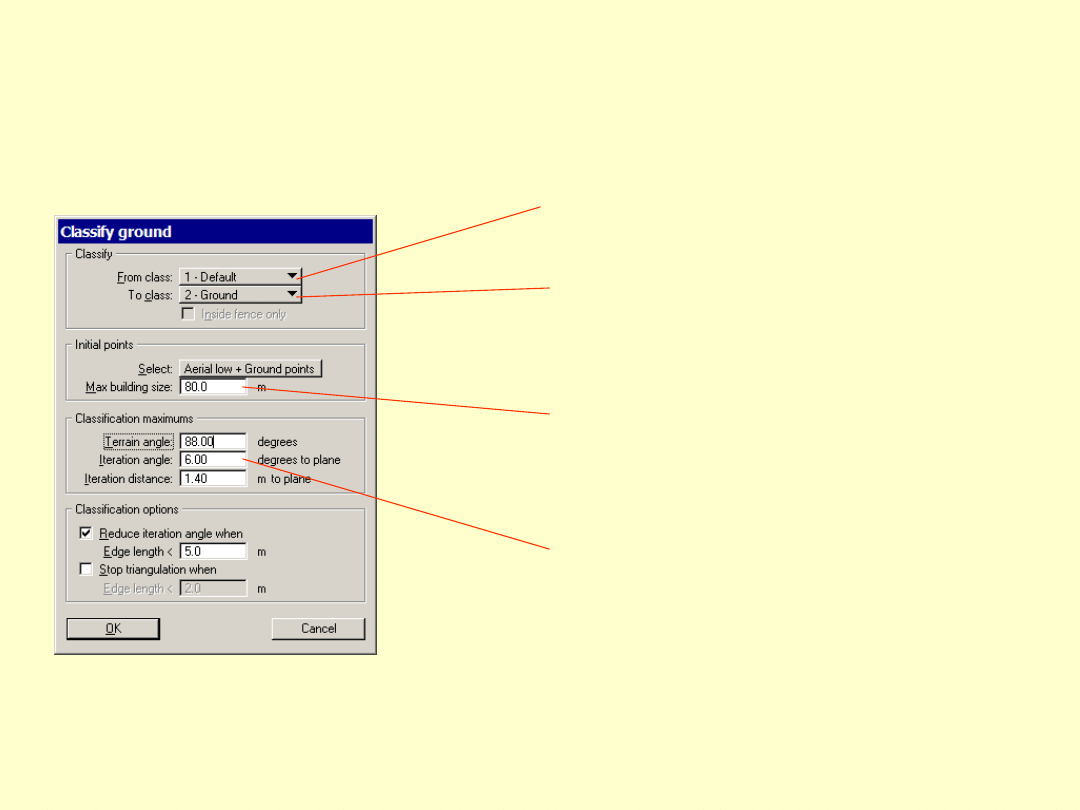
Parameters
Source class
Destination class
Initial point selection
Main parameter controling
how many points will be
classified
Initial point logic
• No building covers an area 80m * 80m size
• Lowest point in any such rectangle is ground
Terrain angle
• Maximum terrain slope
• Use 88-90 degrees if man made
features present
• Estimate maximum slope (and add
10-15) if all natural terrain
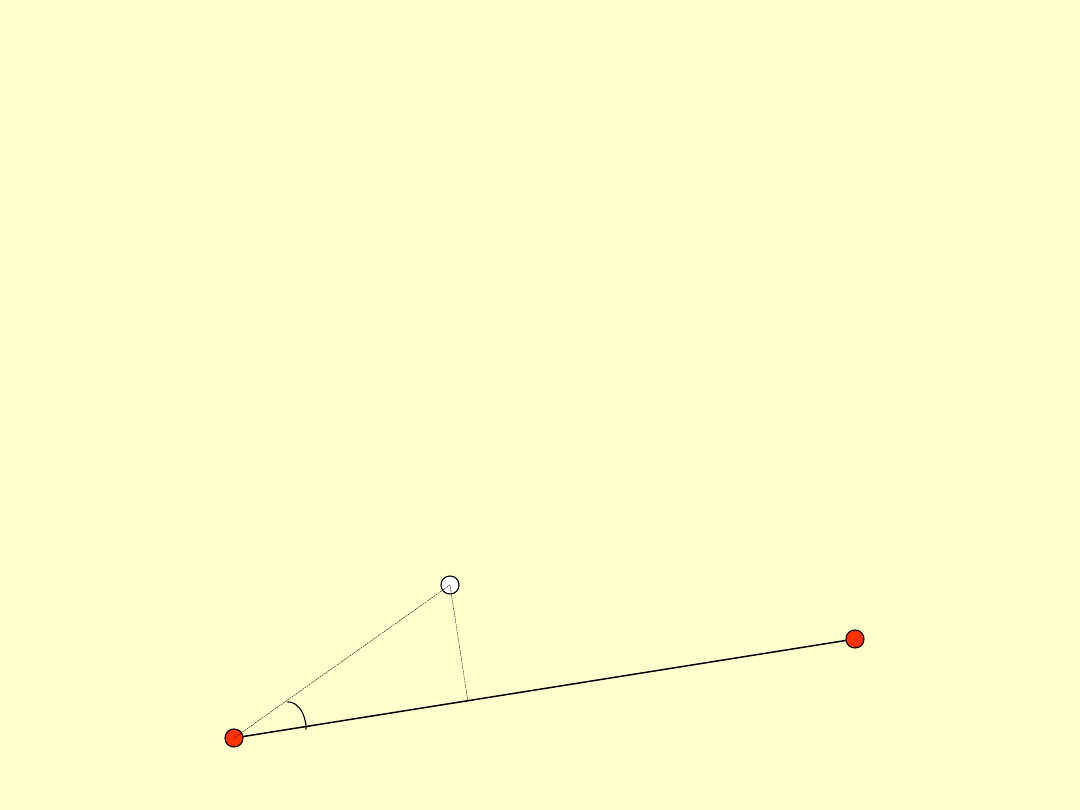
Iteration angle
• Each potential point is compared
against triangle it is inside
• Iteration angle is angle between triangle
plane and a line connecting potential
point with the closest triangle vertex
Angle
D
is
ta
n
ce
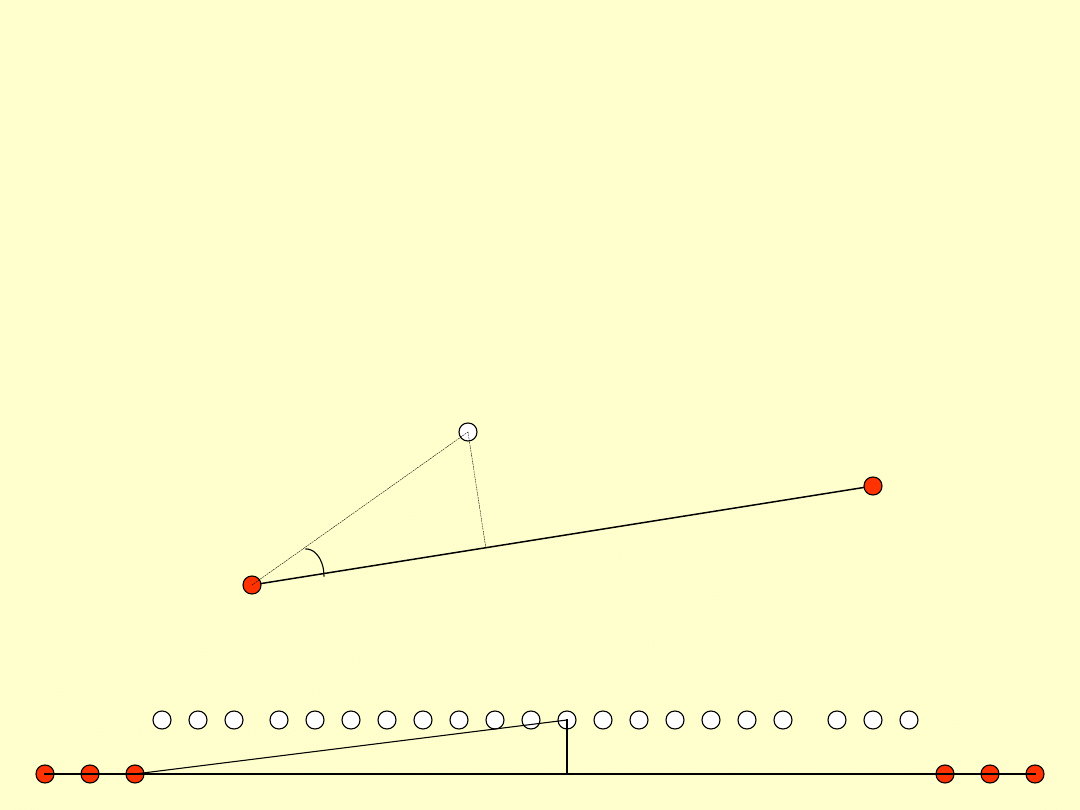
Iteration distance
• Iteration distance is distance from point
to triangle plane
• Safe guard preventing the routine from
classifying large, single floor buildings
Angle
D
is
ta
n
ce
Reduce iteration angle
• Reduces eagerness to classify points
inside small triangles
• Application is more eager to classify
when there is a large hole in the ground
• Application is less eager to classify
when there is a small hole in the ground
Edge
leng
th
Iteration angle inside small triangles
approaches zero when longest edge
is shorter than Edge length setting
Classification hints
• Classify too few points to ground
rather than too many
– It is easy to find and fix holes in the
ground
– Finding and fixing low vegetation points
which have become ground is difficult
Classification hints
• You may preclassify difficult places
before running ground classification
– Classify manually if there are a few very
large buildings preventing from using a
reasonable value for maximum building
size (60 - 100m)
– Classify tops of steepest hills
Document Outline
- Ground classification
- Slide 2
- Parameters
- Initial point logic
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Terrain angle
- Iteration angle
- Iteration distance
- Reduce iteration angle
- Classification hints
- Slide 32
Wyszukiwarka
Podobne podstrony:
Instrukcja Nokia 6303 classic PL
Ground Covers
ClassicML PreInt Glossary
Classic Battletech Technical Readout Project Omega
Broszura Carpentier Edwards Classic
Ground Points
Castles & Crusades Multi Classing
classic warto żyć
Krav Maga Groundfighting id 250 Nieznany
Chapter 2 Principles of Stratigraphic Classification
Jazz vs Classical Music
Nie chcę więcej Classic
Nokia 1680 classic pl
Nokia 2330 Classic Instrukcja Obsługi PL
ClassicML Int Glossary
Programing from the Ground Up [PL]
Nokia 3110 Classic [Opis]
History of Jazz and Classical Music
groundassault
więcej podobnych podstron