WZORCE RUCHÓW
JEDNOSTAWOWYCH
I. Ruchy izotoniczne i skurcze
izometryczne
Ruchy izotoniczne
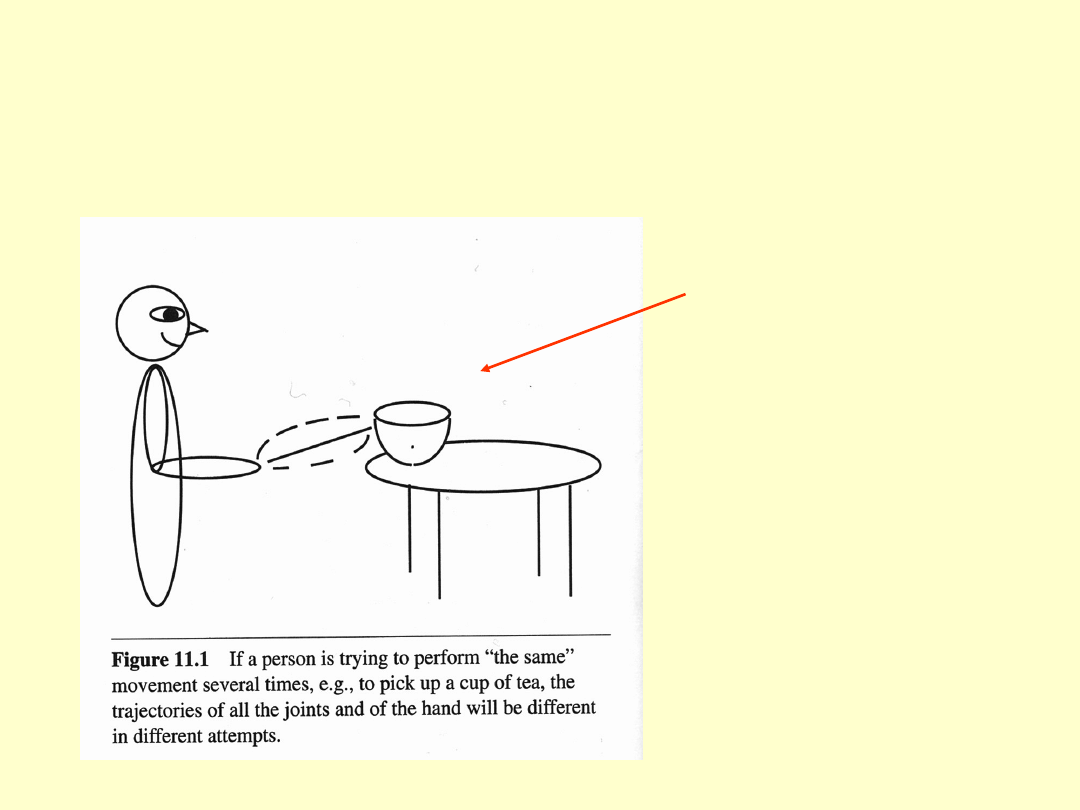
Zmienność ruchowa:
ruchy „zindywidualizowane”
cechują się dużą zmiennością
z próby na próbę podczas ich
wielokrotnego powtarzania
Zmienność osobnicza
Każdy człowiek z osobna jest
niepowtarzalny, unikalny =
charakteryzuje się innymi
wymiarami ciała, innymi
doświadczeniami i
zdolnościami do uczenia się
czynności ruchowych
Jak umożliwić dużą
powtarzalność eksperymentu ?
Redukcja parametrów opisujących zadanie ruchowe
i zmiennych dostępnych badanemu w wykonywanym
zadaniu ruchowym
Ograniczenie ruchu do:
• pojedyńczego stawu,
• jednej osi w ruchu obrotowym,
• stałego obciążenia zewnętrznego (warunki
izotoniczne ograniczone do płaszczyzny poprzecznej =
bez wyraźnych wpływów siły przyciągania ziemskiego)
• stałej długości mięśnia (skurcz izometryczny)
Skurcz izometryczny
Czy może być zapewniony ?
Dlaczego eksperymentatorzy badają ten
fenomen (używają tego modelu
badawczego) ?
Każdy aktywny skurcz włókien mięśniowych prowadzi
do:
• zmniejszenie długości mięśnia kosztem wydłużenia
ścięgna i innych tkanek miękkich →
• zmiany prędkości skurczu mięśnia →
• zmiany aktywności receptorów wrażliwych na zmiany
długości i napięcia mięśnia (wrzeciona nerwowo-
mięśniowe
i aparaty ścięgniste Golgiego)
Dlaczego naukowcy bardzo często badają
ruchy (skurcze) jednostawowe ?
• postęp nauki następuje poprzez studiowanie wpierw układów
mniej
złożonych (jednostawowy aparat ruchu), a dopiero później
bardziej
złożonych (wielostawowy aparat ruchu)
• badanie skurczu izometrycznego zapenia teoretyczne ramy i
podejście
eksperymentalne, które ułatwiają zrozumienie podstawowych
zasad
sterowania ruchem człowieka
• użyteczność badania ruchów jednostawowych została
potwierdzona
w badaniach klinicznych
• eksperymenty naukowe zapewniają powtarzalne warunki (przy
wykorzy-
staniu tego modelu SJM)
II.
Parametry zadania ruchowego
(wejściowe) i
parametry
wykonanego ruchu
(wyjściowe)
1. PARAMETRY ZADANIA RUCHOWEGO - zadana
badanemu czynność do wykonania
•
Amplituda
ruchu,
czas
czynności,
prędkość
ruchu,
obciążenie
zewnętrzne
,
dokładność
wykonania czynności (instrukcja)
2. PARAMETRY WYKONANEGO RUCHU – to, co
pacjent wykonuje, a my rejestrujemy
•
Parametry kinematyczne:
kąty w stawach
(ułożenie),
prędkość
ruchu,
przyspieszenie
w ruchu
•
Parametry kinetyczne:
moment siły
w stawie
i jego pochodne
•
Parametry neurofizjologiczne:
MEG, EEG, EMG, MMG
•
Wskaźnik dokładności:
SR
,
%
prób udanych,
zmienność pozycji
końcowej
CZARNA SKRZYNKA
Dlaczego badacze analizują
relacje
pomiędzy parametrami zadania
ruchowego
(wejściowymi)
i parametrami
wykonanego ruchu
(wyjściowymi) ?
Badanie relacji pomiędzy parametrami wejściowymi
i wyjściowymi w układzie złożonym służy do
testowania hipotez dotyczących wewnętrznej
struktury i/lub reguł funkcjonowania
CZARNEJ SKRZYNKI
(OUN).
CZARNEJ SKRZYNKI
III. Wzorce aktywności
elektromiograficznej (EMG) podczas
jednostawowych, izotonicznych
czynności ruchowych
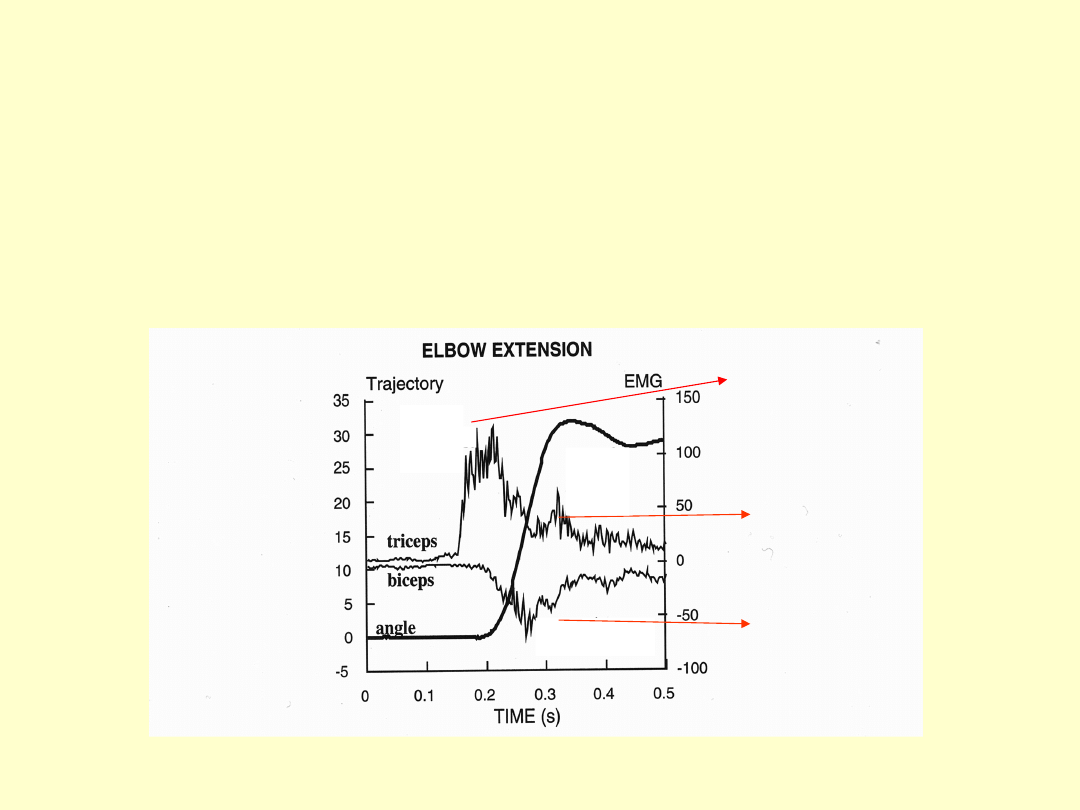
TÓJFAZOWY WORZEC AKTYWNOŚCI ELEKTROMIOGRAFICZNEJ (EMG)
podczas szybkiego izotonicznego ruchu prostowania w stawie łokciowym
I’sza AGO - salwa
czynnościowa
– przyspiesza ruch kończyny
w kierunku pozycji docelowej
ANT - salwa hamowania
– spowalnia ruch kończyny,
kiedy zmierza ona do
pozycji
docelowej
II’ga AGO - salwa
stabilizacji
– fiksuje kończynę w pozycji
końcowej-docelowej
AGONISTA
– powoduje
przyśpieszenie kończyny
lub zwiększenie momentu
siły w pożądanym
kierunku
ANTAGONISTA
– hamuje
ruch i utrudnia rozwijanie
siły przez agonistę
I’sz
a
salw
a
AG
O
II’g
a
salw
a
AG
O
salwa
ANT
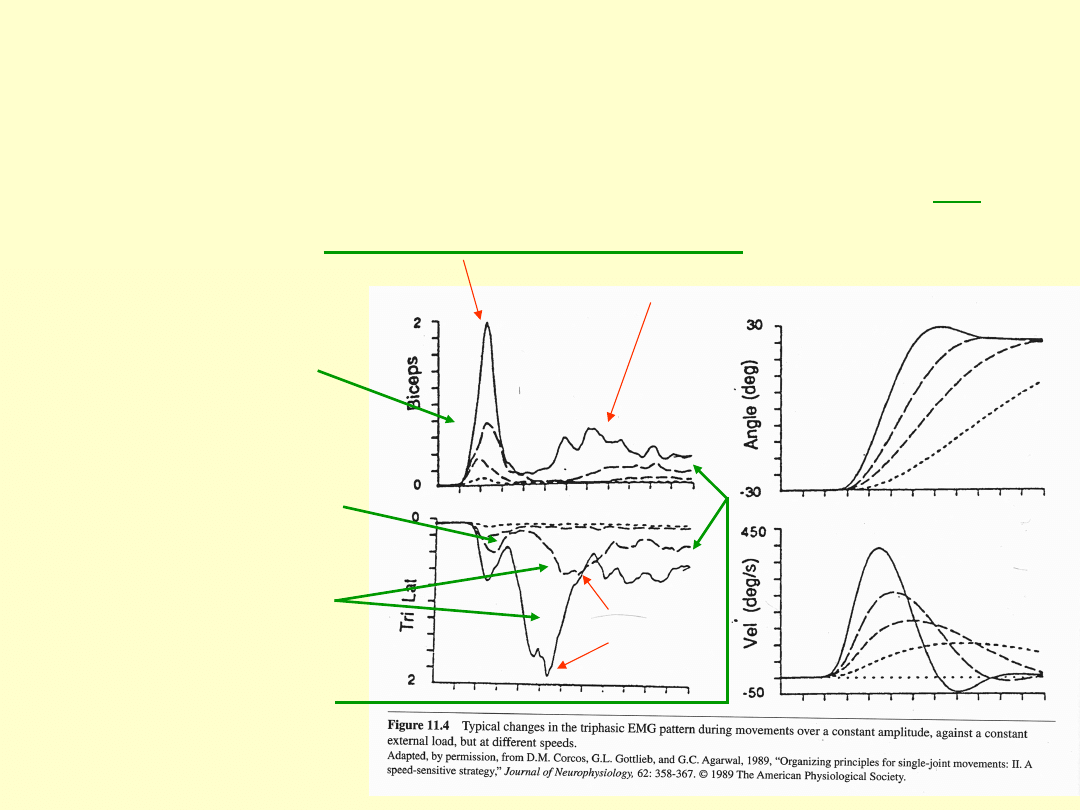
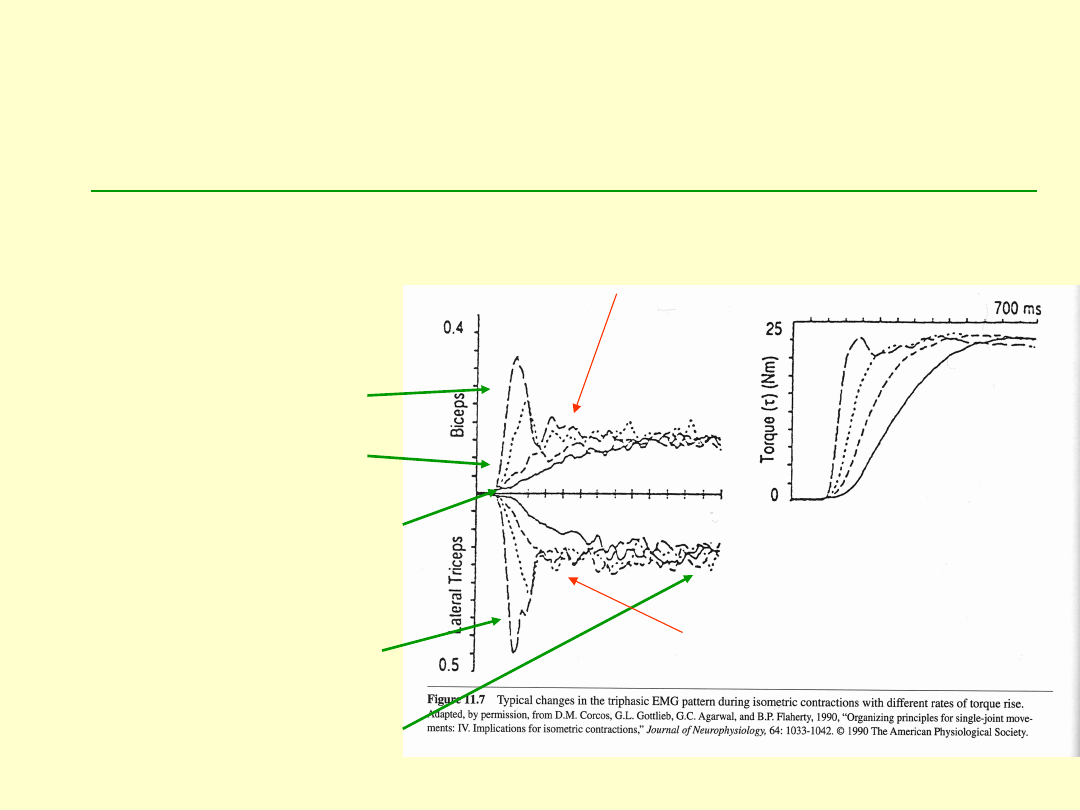
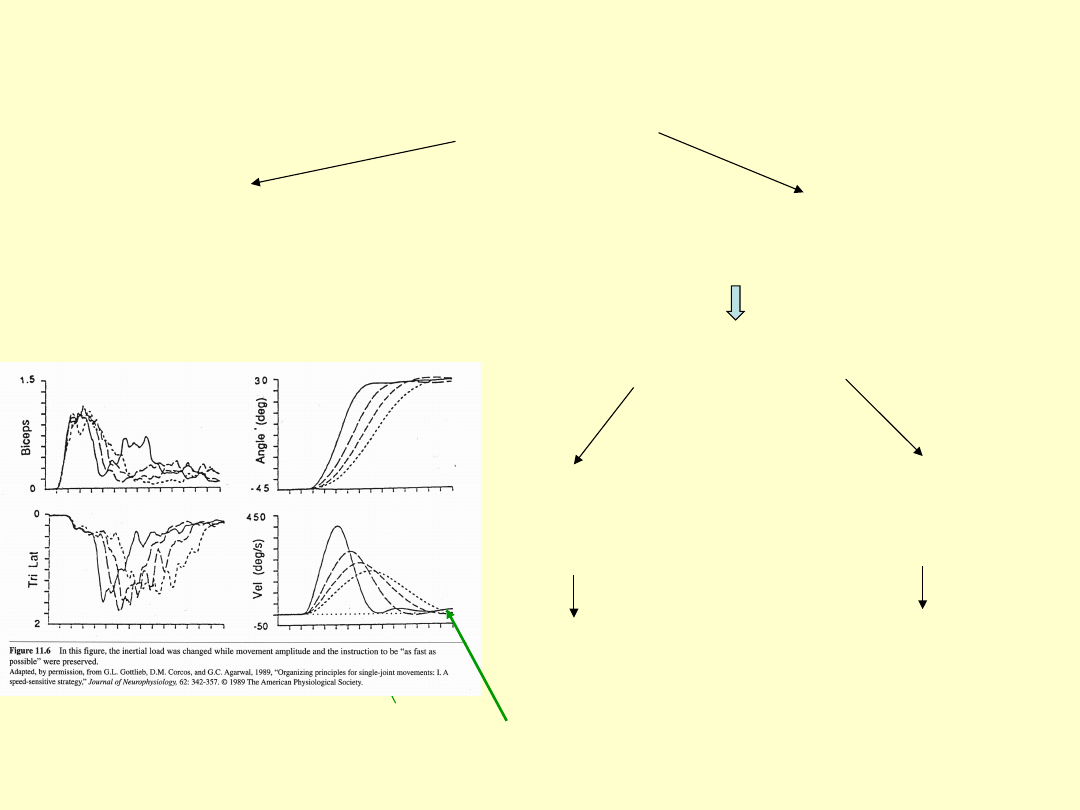
Typowe zmiany w trójfazowym wzorcu EMG
podczas ruchów o stałej amplitudzie i przeciwko
stałemu obciążeniu zewnętrznemu, ale
ze
zmienną prędkością
.
I’sza salwa AGO
II’ga salwa AGO
Salwa ANT
Wzrastająca prędkość
ruchu prowadzi do:
1/
Wzrostu
:
* tempa narastania
amplitudy EMG
* wartości szczytowej i
IEMG
pierwszej salwy
agonisty
2/
Skrócenia
czasu
opóźnienia
salwy antagonisty
3/
Wzrostu
amplitudy i
IEMG
salwy antagonisty
4/
Wzrostu
poziomu
końcowej
koaktywacji agonistów
i
antagonistów (ze
wzrostem
prędkości ruchu)
AGO – agonista, ANT – antagonista
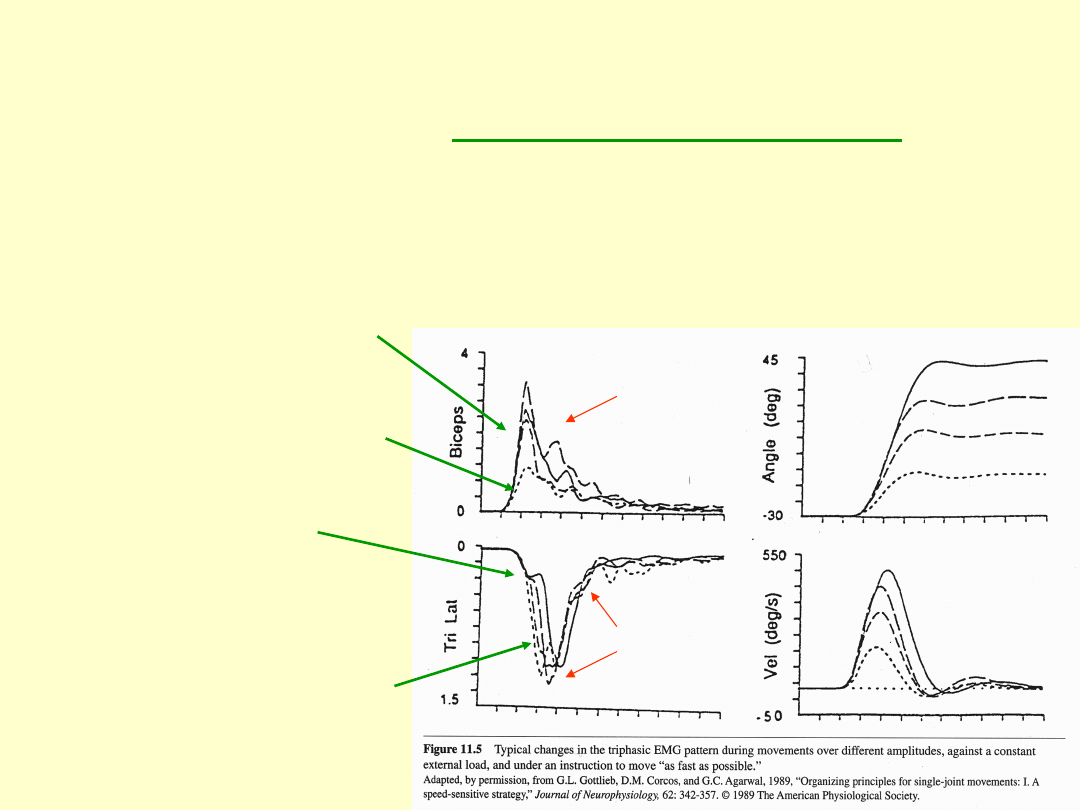
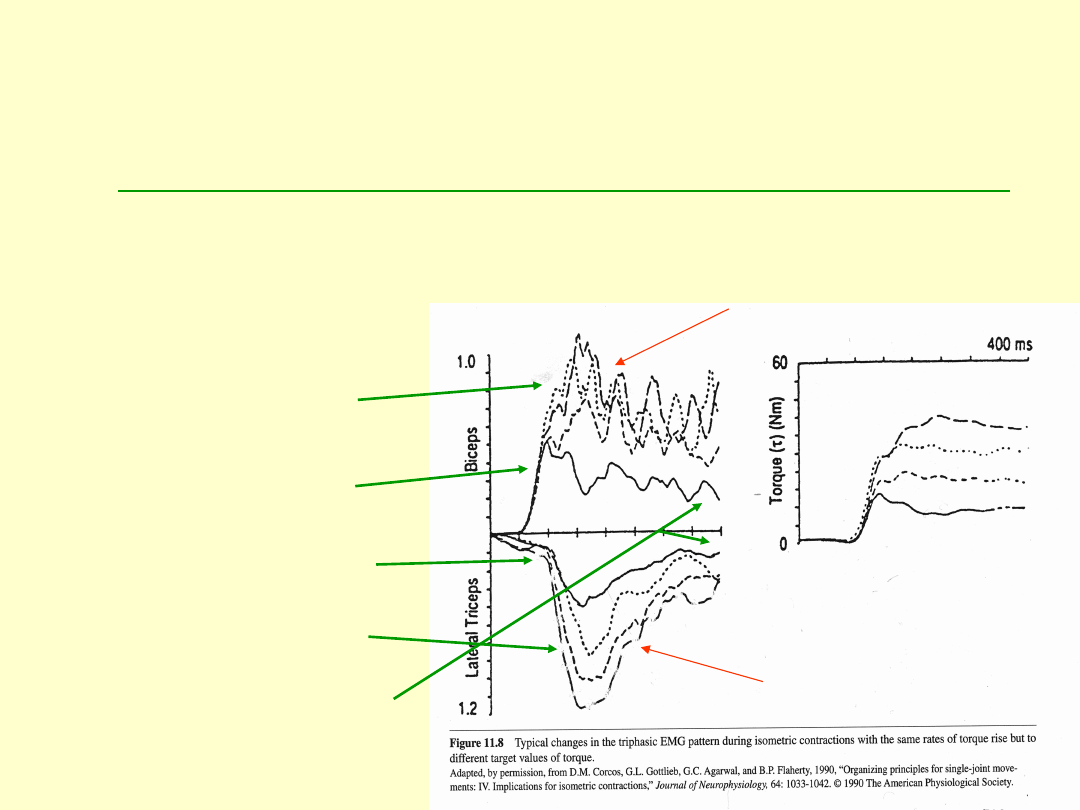
Wzrastająca amplituda ruchu
prowadzi do:
1/
Wzrostu
:
* wartości szczytowej, czasu
trwania i IEMG pierwszej
salwy agonisty
2/
Braku zmian
w tempie
narastania
amplitudy EMG salwy AGO
3/
Wydłużenia
czasu
opóźnienia
salwy antagonisty
4/
Brak jednoznacznych zmian
* w amplitudzie i czasie
trwania
salwy antagonisty: ↑ ampl.
ruchu w mniejszych
zakresach
prowadzi do ↑ salwy ANT,
a dalszy ↑ ampl. ruchu
może
prowadzić do ↓
salwy ANT
AGO – agonista, ANT – antagonista
Typowe zmiany w trójfazowym wzorcu EMG
podczas ruchów o
zmiennej amplitudzie
, przy
stałym obciążeniu zewnętrznym i stałej prędkości
(MAX!!! AFAP).
Salwa ANT
I’sza salwa AGO
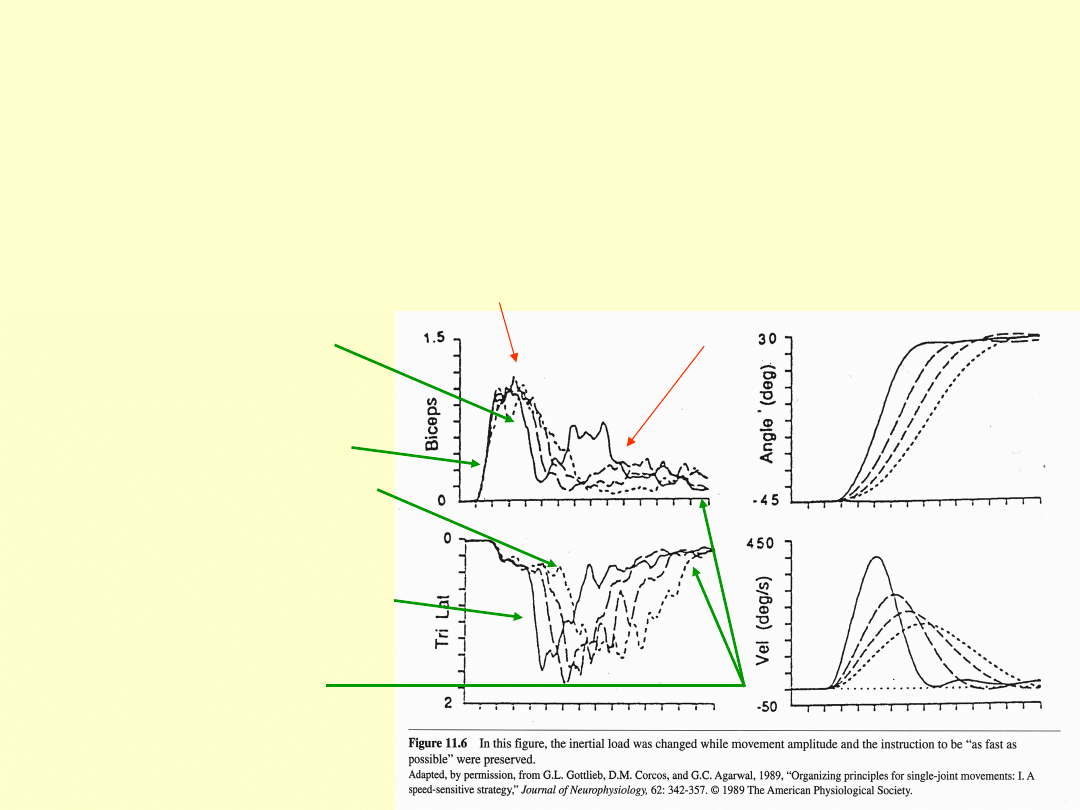
1/
Wzrostu
:
* czasu trwania i IEMG
pierwszej
salwy agonisty
2/
Braku zmian
w tempie
narasta-
nia amplitudy EMG salwy
AGO
3/
Wydłużenia
czasu
opóźnienia
salwy antagonisty
4/
Brak wyraźnych zmian
w charakterystyce salwy
ANT
5/
Wzrostu
poziomu końcowej
koaktywacji agonistów i
antagonistów
Wzrastające obciążenie zewnętrzne
prowadzi do:
AGO – agonista, ANT – antagonista
Typowe zmiany w trójfazowym wzorcu EMG
podczas ruchów o
zmiennym obciążeniu
zewnętrznym
, przy stałej amplitudzie i stałej
prędkości ruchu
(MAX!!! AFAP).
Salwa ANT
I’sza salwa AGO
II’ga salwa AGO
III. Wzorce aktywności
elektromiograficznej (EMG) podczas
jednostawowych, izometrycznych
czynności ruchowych
SKURCZE IZOMETRYCZNE
STOPNIOWANY
wzrost
momentu siły do
zada-nego poziomu
i
utrzymanie
na zadanym
poziomie
PULSACYJNY
wzrost
momentu siły do
zadanego poziomu
i
natychmiastowy
szybki
powrót
do wyjściowego
poziomu momentu siły
(relaksacja)
Szybkie skurcze izometryczne
charakteryzują się
* trójfazowym wzorcem EMG,
* jednakże druga, opóźniona salwa agonisty
często nie występuje
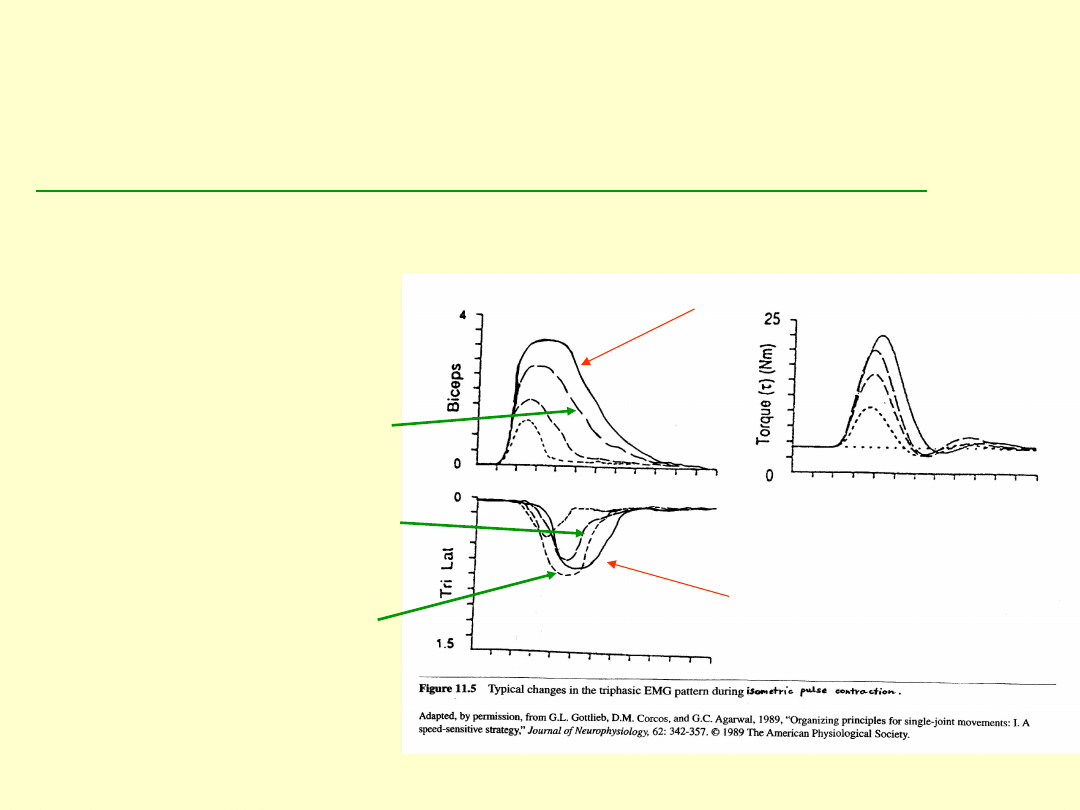
1/
Wzrostu
:
* wartości szczytowej i IEMG
pierwszej salwy agonisty
2/
Wzrost
tempa narastania
amplitudy EMG salwy AGO
3/
Brak wyraźnych zmian
w
czasie
opóźnienia salwy
antagonisty
4/
Wzrost
amplitudy i IEMG
salwy
ANT
5/
Brak wyraźnych zmian
w
poziomie końcowej
koaktywacji
agonistów i antagonistów
Wzrastające tempo narastania
momentu siły prowadzi do:
AGO – agonista, ANT – antagonista
Typowe zmiany w trójfazowym wzorcu EMG
podczas
stopniowanego
skurczu izometrycznego
ze
zmiennym tempem narastania momentu siły
,
przy stałej zadanej końcowej wartości momentu
siły
.
Salwa ANT
I’sza salwa AGO
II’ga salwa AGO
Salwa AGO
Salwa ANT
1/
Wzrostu
:
* wartości szczytowej i IEMG
salwy agonisty
2/
Brak zmian
w tempie
narastania
amplitudy EMG salwy AGO
3/
Brak wyraźnych zmian
w
czasie
opóźnienia salwy
antagonisty
4/
Wzrost
amplitudy i IEMG
salwy
antagonisty
5/
Wzrost
poziomu końcowej
koakty-
wacji agonistów i
antagonistów
Wzrastająca końcowa wartość
momentu siły prowadzi do:
AGO – agonista, ANT – antagonista
Typowe zmiany w trójfazowym wzorcu EMG
podczas
stopniowanego
skurczu izometrycznego
ze
zmienną końcową wartością momentu siły
,
przy stałym tempie narastania momentu siły.
Salwa ANT
Salwa AGO
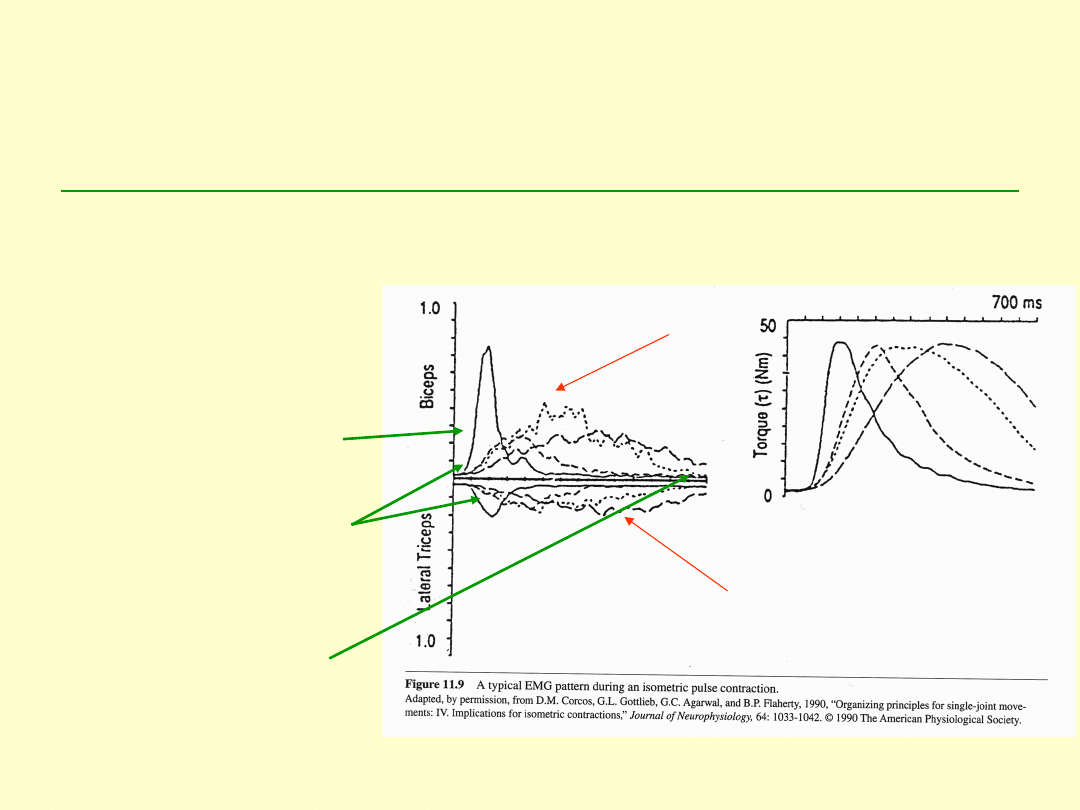
Skurcze izometryczne
„pulsacyjne”
• Wzorzec EMG staje się bardziej „fazowy”
• Występuje lepiej zaznaczona druga salwa
agonisty
• Występuje niższy poziom końcowej
koaktywacji agonistów i antagonistów
(współskurcz)
1/
Wzrost
:
czasu trwania pierwszej salwy
AGO
2/
Wzrost
czasu opóźnienia salwy
ANT
3/
Brak jednolitych zmian w
ampli-
tudzie i IEMG salwy ANT
Wzrastająca końcowa wartość
momentu siły prowadzi do:
AGO – agonista, ANT – antagonista
Typowe zmiany w trójfazowym wzorcu EMG
podczas
pulsacyjnego
skurczu izometrycznego ze
zmienną końcową wartością momentu siły
, przy
stałym tempie narastania momentu siły.
Salwa AGO
Salwa ANT
1/
Lepiej zaznaczonego
fazowego charakteru wzorca
2/
Wzrostu
amplitudy EMG
pierwszej salwy AGO
3/
Wzrostu
tempa narastania
amplitudy EMG I’szej salwy
AGO i salwy ANT
5/
Spadku
poziomu końcowej
koaktywacji AGO i ANT
Wzrastające tempo narastania
momentu siły prowadzi do:
AGO – agonista, ANT – antagonista
Typowe zmiany w trójfazowym wzorcu EMG
podczas
pulsacyjnego
skurczu izometrycznego ze
zmiennym tempem narastania momentu siły,
przy stałej wartości końcowego momentu siły.
Salwa AGO
Salwa ANT
V. Hipoteza pdwójnej strategii
EMG – jako podstawa dla hipotez dotyczących sterowania ruchem
EMG jako wymierny wskaźnik
sygnałów kontrolnych w OUN
EMG – informacja o udziale
sygnałów z OUN i znacznego
wpływu aktywności obwodowych
łuków odruchowych (zmiana
amplitudy i czasu trwania
pobudzenia motoneuronów α)
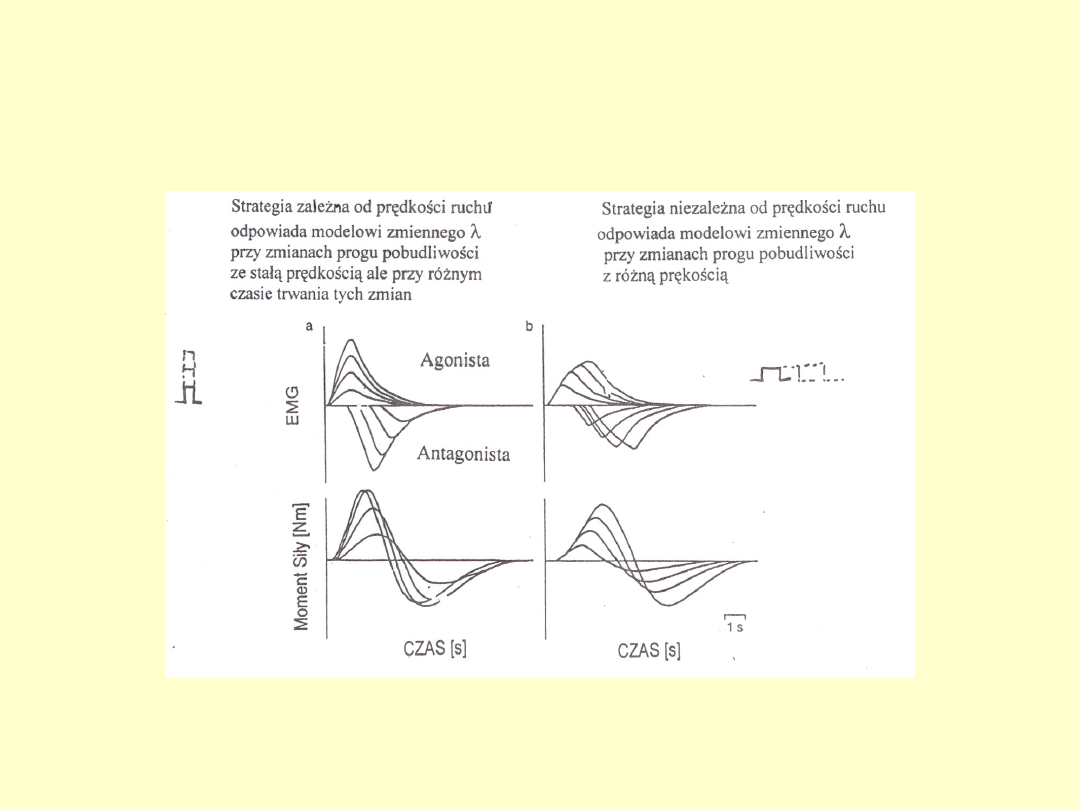
Hipoteza podwójnej strategii
Ruchy mogą być
wykonywane ze
zmienną prędkością
Podstawowa idea
Strategia zależna
od prędkość
ruchu
Hipoteza ta nie zakłada aktualnej prędkości ruchu,
lecz zakłada sterowanie wewnętrzną zmienną,
którą mózg używa do różnicowania prędkości
ruchu
Ruchy mogą być
wykonywane ze
stałą prędkością
Strategia
niezależna od
prędkość ruchu
Słaby punkt hipotezy podwójnej
strategii
Założenie, że sterujemy ruchami przez wysyłanie
komend
do pul
motoneuronów α
mięśni agonistycznych i
antago-nistycznych, które to komendy kształtują
wzorce EMG
tych mięśni
Jednakże
motoneurony α nie otrzymują jedynie sygnałów
zstępujacych
z ośrodków wyższych, lecz również sygnały z
receptorów obwodowych
(których aktywność zależy od
aktualnych zmian w długości mięśnia, kąta w stawie i
sił ścięgien), które wywołują odruchowe zmiany w ich
aktywności i są następnie
odzwierciedlone we wzorcu
EMG
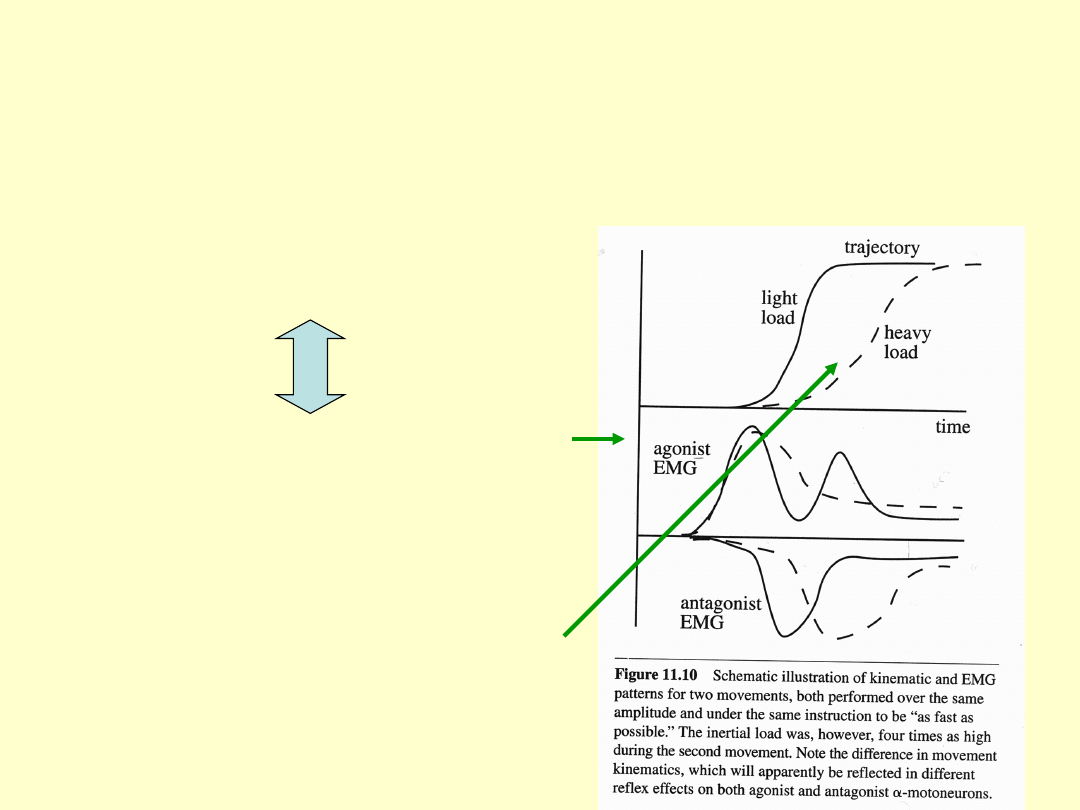
Wpływ różnorodnych
efektów odruchowych na
motoneurony mięśni
agonistycznych i
antagonistycznych
Aktualne zmiany w długości
mięśnia, kąta stawowego i
sił ścięgnistych podczas
ruchu wpływają na
aktywność receptorów
obwodowych
Poczwórny przyrost obciążenia
zewnętrznego prowadzi do spadku
prędkości, co będzie odzwierciedlone w
zmianach aktywności wirtualnie
wszystkich receptorów obwodowych
Czy wzorce EMG są wiarygodnymi wskaźnikami komendy
ośrodkowej?
Czy hipoteza podwójnej strategii
jest użyteczna jeśli wzorce EMG
nie są wiarygodnym wskaźnikiem
komendy ośrodkowej,
1. W literaturze opisuje się występowanie regularności w
pierwszej salwie EMG agonisty w ruchach jednostawowych
(I’sza salwa AGO trwa około 100 ms, który to czas jest za
krótki dla odruchów aby miały znaczący wpływ na tę salwę).
2. Podstawowa idea klasyfikowania hipotetycznych komend na
dwie kategorie może być zastosowana bez zakładania
wyłącznej
roli komendy ośrodkowej nad aktywnością motoneuronów
(i sygnałami EMG z tych mięśni).
Kontrola ruchu – oprócz
komendy
z OUN również zwrotne wpływy
aferentne (odruchy)
Model λ (Feldman, 1986) = LAMBDA
Zakłada, że pobudzenie motoneuronów α jest nie
tylko
z góry zaprogramowane przez OUN
(kontrola na
zasadzie otwartej pętli),
ale że pobudzenie
motoneronów uzależnione jest również od wpływów
dośrodkowych
z receptorów (pętla zamknięta-sprzężenie zwrotne).
W modelu powyższym
kontrolowanym parametrem jest
próg pobudliwości
(λ)
tonicznego odruchu
na rozciąganie (TOR)
- zmiana progu może zachodzić ze stałą prędkością
ale przy różnym czasie trwania tej zmiany
- zmiana progu z różną prędkością
Wzorce akywności EMG wielu
mięśni (7-8) w ruchach w
płaszczyźnie strzałkowej
1. Występowanie zależności EMG, a kierunkiem ruchu i
prędkością ruchu.
2. Dostosowywanie amplitudy i czasu opóźnienia EMG w
zależości od jego kierunku ruchu, prędkości i przyspieszenia.
3. Kiedy ruchy wykonywane były z różną prędkością (różny
czas trwania ruchu) to pojawiał się dodatkowo
- komponent toniczny jako kompensacja siły ciężkości
- komponent fazowy, towarzyszący zmianom prędkości
Jak się ma strategia zależna od prędkości ruchu i
strategia niezależna od prędkości ruchu do
modelu λ
- Latash i Gottlieb (1991), używając modelu λ uzyskali stymulowane wzorce
EMG (ruchów jednostawowych) z których wynika że:
Wykazano, że wzorce EMG ruchów celowych zawierają:
- rozpoczęcie salwy antagonistów (komenda ośrodkowa)
- jak również sygnały aferentne (amplituda i czas trwania EMG)
- wzorzec EMG ruchów celowych i skurczu izometrycznrgo jest podobny
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
Wyszukiwarka
Podobne podstrony:
The?nger of a single story
Adorno Freudian Theory and the Pattern of Fascist Propaganda
Patterns of damage in genomic DNA sequences from a Neandertal
PATTERNS OF A NARRATIVE TEXT
Lost Souls Patterns of Evil
Intraindividual stability in the organization and patterning of behavior Incorporating psychological
SHSBC 289 PATTERN OF THE GPM
Richard Bandler And John Grinder Patterns Of The Hypnotic Techniques Of Milton Erickson
Reuse of single use items
Development Of A Single Phase Inverter For Small Wind Turbine
Patterns of Chaos Colin Kapp
48 Patterns of Taiji Ball Qigong By Dr Yang Jwing Ming
Donald H Mills The Hero and the Sea, Patterns of Chaos in Ancient Myth (pdf)(1)
Continuities and Discontinuities Patterns of Migration, Adolescent
Accelerated Drying of Single Hardwood Boards by Combined Vacuum Microwave Application
Intraindividual stability in the organization and patterning of behavior Incorporating psychological
64 Motion nuances of pace and movement
THE VACCINATION POLICY AND THE CODE OF PRACTICE OF THE JOINT COMMITTEE ON VACCINATION AND IMMUNISATI
Glądalski, Michał Patterns of year to year variation in haemoglobin and glucose concentrations in t
więcej podobnych podstron