
ARCHITEKTURA
ARCHITEKTURA
KOMPUTERÓW
KOMPUTERÓW
dr inż. Janusz Kosiński
dr inż. Janusz Kosiński
Materiały do wykładów
Materiały do wykładów
@Janusz Kosiński, 2005
Borowik B., Programowanie równoległe w zastosowaniach.
MIKOM, 2001.
Brookshear G. J., Informatyka w ogólnym zarysie. - WNT,
Warszawa 2003.
Chalk B.S., Organizacja i architektura komputera – WNT,
Warszawa 1998
Metzger P., Anatomia PC – HELION, 2001.
Metzger P., Diagnostyka i optymalizacja komputerów PC.
HELION, 2001.
Mueller S., Soper M.E. – Rozbudowa i naprawa komputerów
PC – HELION 2001.
Stallings W., Architektura komputerów. - WNT, Warszawa
2001.
Zalecana literatura
@Janusz Kosiński, 2005
1. Wprowadzenie do architektury komputerów
• historia i architektura pierwszych komputerów
• podstawowa terminologia
• podstawowe składniki systemu komputerowego
• poziomy logiczne systemu komputerowego
• model von Neumanna
2. Reprezentacja danych w systemach
komputerowych
• typowe reprezentacje numeryczne
• kody BCD, EBCDIC, ASCII i Unicode
• reprezentacja stało i zmiennoprzecinkowa
• zapisywanie danych
• wykrywanie błędów
TREŚĆ ZAJĘĆ
@Janusz Kosiński, 2005
3.
Algebra Boolowska i logika cyfrowa
• algebra Boolowska
• bramki logiczne
• „tablice prawdy”
• mapy Karnaugh
4.
Wprowadzenie do prostego komputera
• cykl pracy
CPU
•
I/O
oraz przerwania
• prosty program
• assembler
TREŚĆ ZAJĘĆ
@Janusz Kosiński, 2005
5.
Instrukcje maszynowe
• instrukcje krótkie
• instrukcje o stałej długości
• typy instrukcji
• adresowanie
• instrukcje potokowe
6.
Pamięć
• typy pamięci
• hierarchia pamięci
• pamięć podręczna
• pamięć wirtualna
• hierarchia pamięci
INTEL
TREŚĆ ZAJĘĆ
@Janusz Kosiński, 2005
7.
Wejście / Wyjście i systemy magazynowania
• prawo Amdahla
• architektura
I/O
– przerwania,
DMA
, system
BUS
• technologia dysków magnetycznych
• dyski optyczne, taśmy magnetyczne; RAID
• kompresja danych
8.
Oprogramowanie systemowe
• system operacyjny
• środowisko chronione
• narzędzia programistyczne asemblery, edytory,
kompilatory, interpretatory
• bazy danych; transakcje
• zarządzanie transakcjami -
CICS
TREŚĆ ZAJĘĆ
@Janusz Kosiński, 2005
9.
Architektury alternatywne - pomiary
wydajności oraz analizy
• maszyna RISC i taksonomia Flynna
• architektury równoległe i wieloprocesorowe;
architektura przepływowa, sieci neuronowe
• podstawowe równanie wydajności komputera
• Clock Rate, MIPS i FLOPS
• benchmarking -
Whetstone
,
Linpack
, i
Dhrystone
• wydajność dysku
TREŚĆ ZAJĘĆ
Wprowadzenie do architektury
Wprowadzenie do architektury
komputerów
komputerów
1
1
1
1
Generacja Zero
- Mechaniczne maszyny kalkulujące (1642 – 1945)
Do lat 1550 typowy europejski biznesmen używał
liczydeł
i stosował do swoich obliczeń najpierw
numerację rzymską
a później
arabską
–
pozwalającą na dokonywanie obliczeń z większą
dokładnością.
Wilhelm Schickard
(1592–1635)
– przypisuje
mu się
wynalezienie pierwszego kalkulatora
mechanicznego – tzw,
„zegara kalkulującego”,
umożliwiającego
dodawanie i odejmowanie sześciocyfrowych liczb.
@Janusz Kosiński, 2005
Generacja Zero
- Mechaniczne maszyny kalkulujące (1642 – 1945)
W 1642,
Blaise Pascal
(1623–1662)
zaprojektował kalkulator mechaniczny
„paskalinę”.
Paskalina umożliwiała
dodawanie i
odejmowanie z przeniesieniem
–
prawdopodobnie pierwsze, praktycznie
zastosowane, mechaniczne urządzenie dodające.
@Janusz Kosiński, 2005

Generacja Zero
- Mechaniczne maszyny kalkulujące (1642 – 1945)
Paskalina
@Janusz Kosiński, 2005
Generacja Zero
- Mechaniczne maszyny kalkulujące (1642 – 1945)
Gottfried Wilhelm von Leibniz
(1646–1716),
znany matematyk, wynalazł kalkulator znany
jako
Stepped Reckoner
(schodkowy
rachmistrz),
który mógł dodawać, odejmować,
mnożyć i
dzielić.
Żadne z tych urządzeń nie posiadało pamięci i nie mogło
być programowane – każdy krok w obliczeniach
wymagał „ręcznej interwencji”.
@Janusz Kosiński, 2005
Generacja Zero
- Mechaniczne maszyny kalkulujące (1642 – 1945)
Charles Babbage
(1791–1871) zaprojektował w
1822
Silnik Różnicowy
(Babbage nazywany jest
ojcem techniki komputerowej).
Nazwa była stosowana ze względu
na technikę obliczeniową
(metoda różnic)
– maszyna została
zaprojektowana do rozwiązywania
funkcji wielomianowych –
może być nazywany kalkulatorem
(nie komputerem).
@Janusz Kosiński, 2005
Generacja Zero
- Mechaniczne maszyny kalkulujące (1642 – 1945)
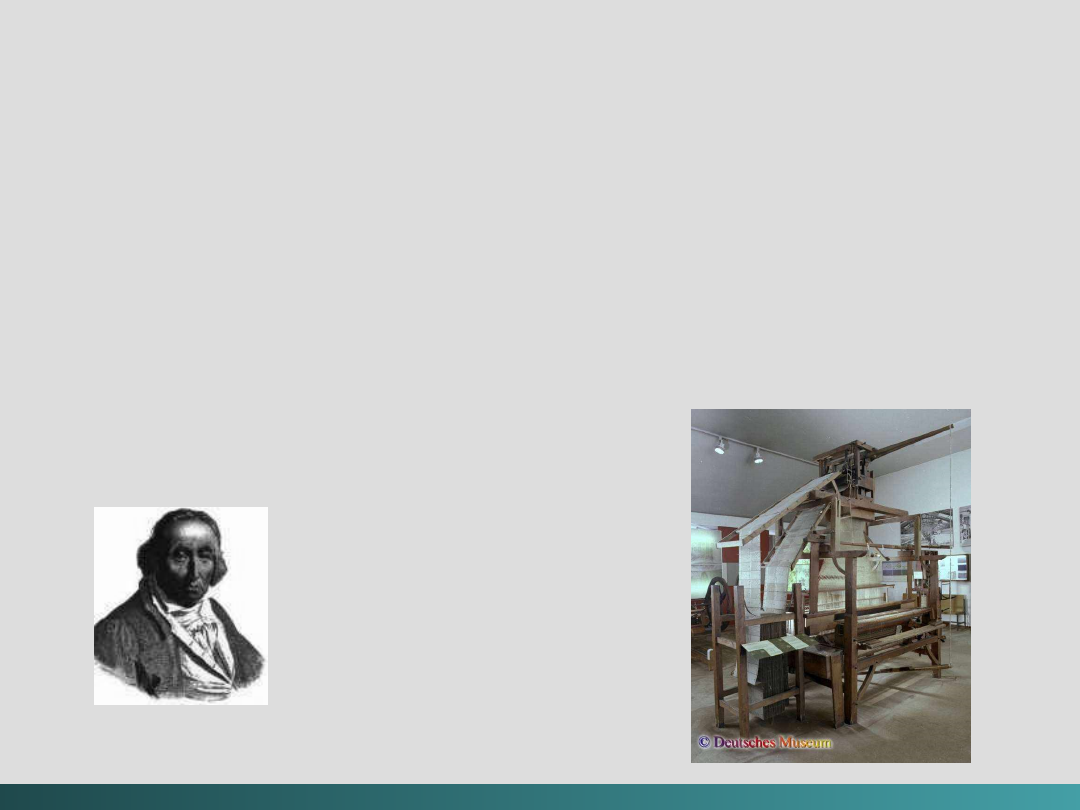
Zastosowanie kart do sterowania zachowaniem się
maszyny zawdzięczamy
Josephowi Marii
Jacquardowi
(1752–1834). W 1801, Jacquard
wynalazł
programowane krosno tkackie
(oferował
Babage’owi gobelin
utkany przy pomocy ponad
10 000 kart
dziurkowanych).
@Janusz Kosiński, 2005
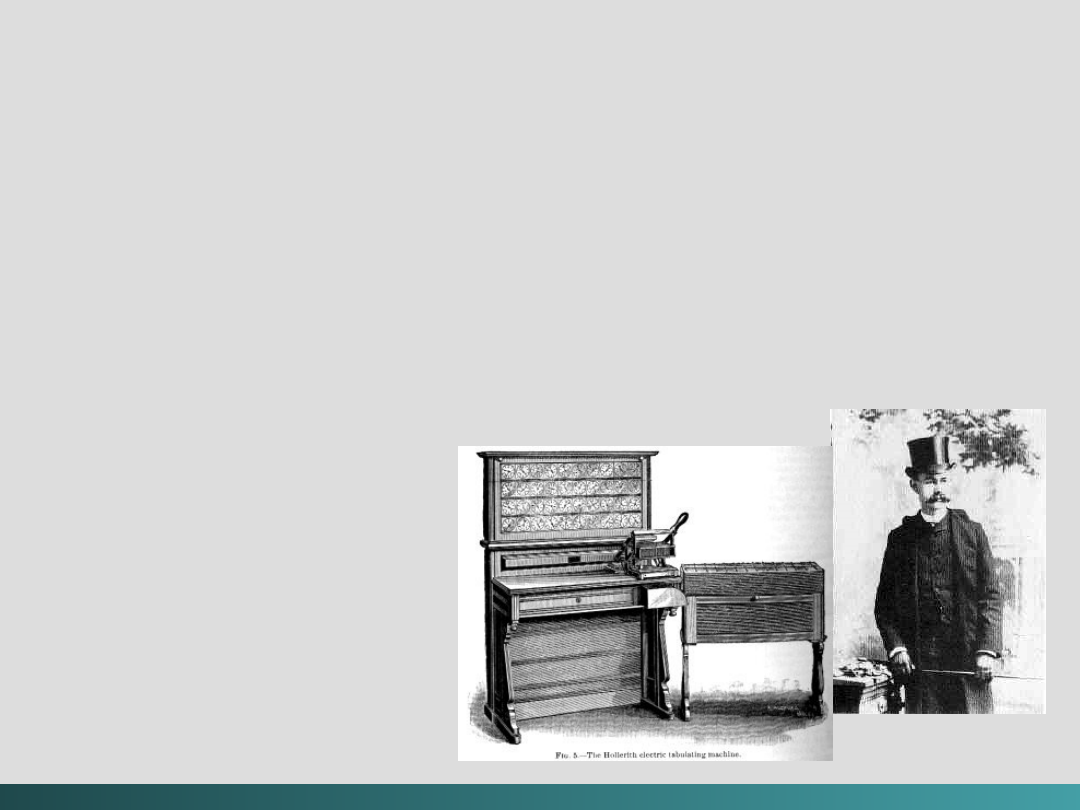
Generacja Zero
- Mechaniczne maszyny kalkulujące (1642 – 1945)
Wśród najważniejszych wynalazków końca XIX w,
znalazła się
„maszyna tablicująca”
Hermana
Holleritha
(1860–1929), zastosowana w 1890 do
spisu ludności US, Hollerith założył firmę, która
później przyjęła
nazwę
IBM
–
80 kolumnowe karty
dziurkowane były
stosowane ponad 50 lat.
@Janusz Kosiński, 2005
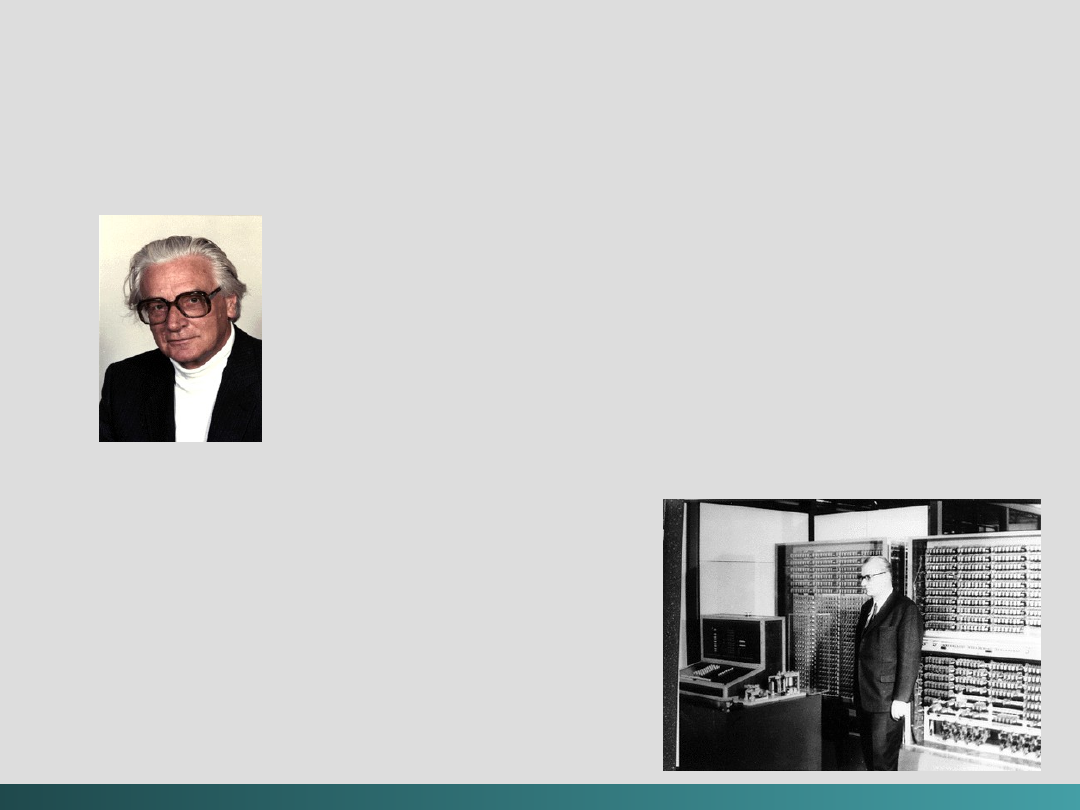
Generacja Pierwsza
- Komputery na lampach próżniowych (1945 – 1953)
W latach 1930
Konrad Zuse
(1910–1995) podjął
problem w miejscu, w którym Babbage
go
zostawił, dodając technologię przekaźników
elektrycznych. Komputer Zuse’go –
Z1
, posiadał w
miejscu ręcznych przekładni, przekaźniki
elektromagnetyczne
(Z1 jeszcze nie miał lamp elektronowych).
@Janusz Kosiński, 2005
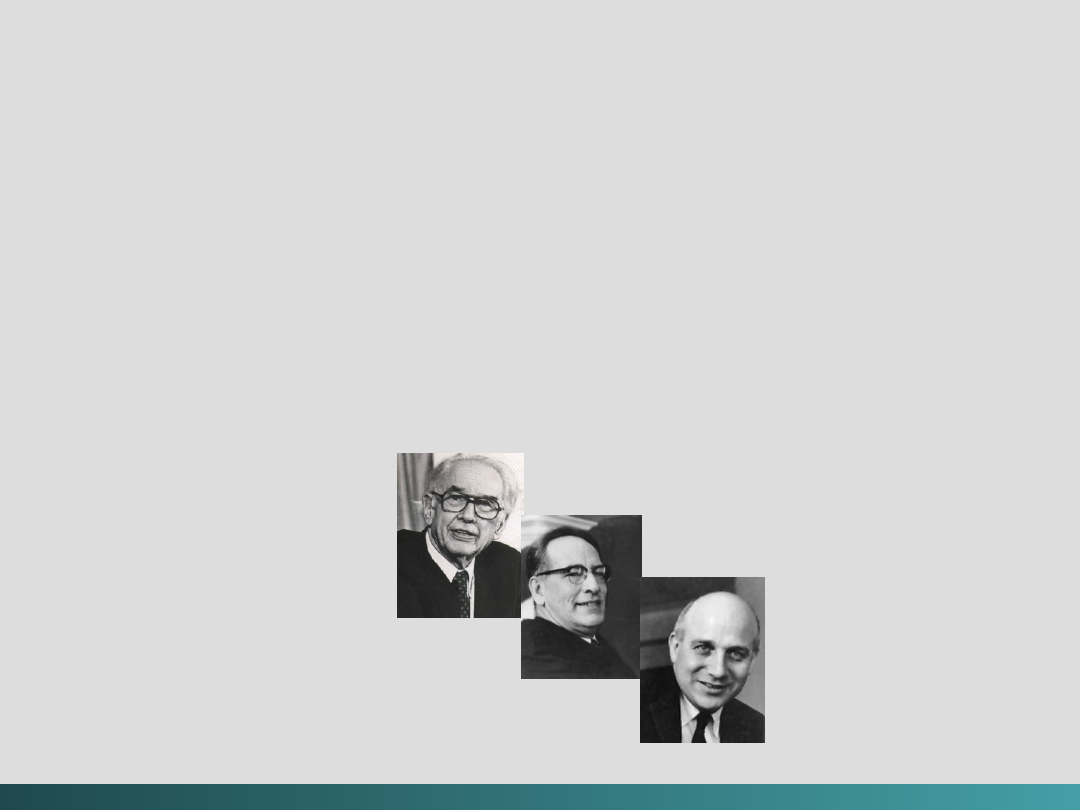
Generacja Pierwsza
- Komputery na lampach próżniowych (1945 – 1953)
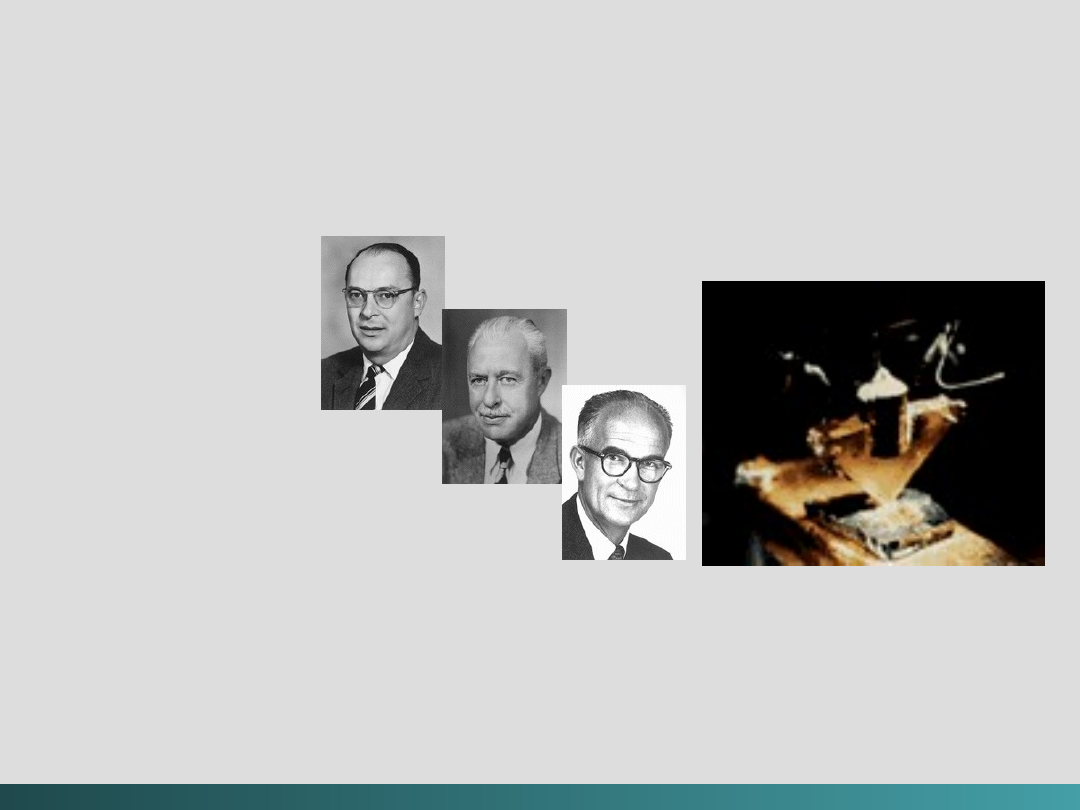
Komputery cyfrowe
, jakie dziś znamy, pochodzą od
wielu prac dokonywanych w latach 1930 i 1940.
Mimo wszystko argumenty, kto był pierwszy,
przemawiają za trzema ludźmi – uważanymi dziś za
„ojców – wynalazców” współczesnych komputerów:
John Atanasof,
John Mauchly,
J. Presper Eckert
@Janusz Kosiński, 2005
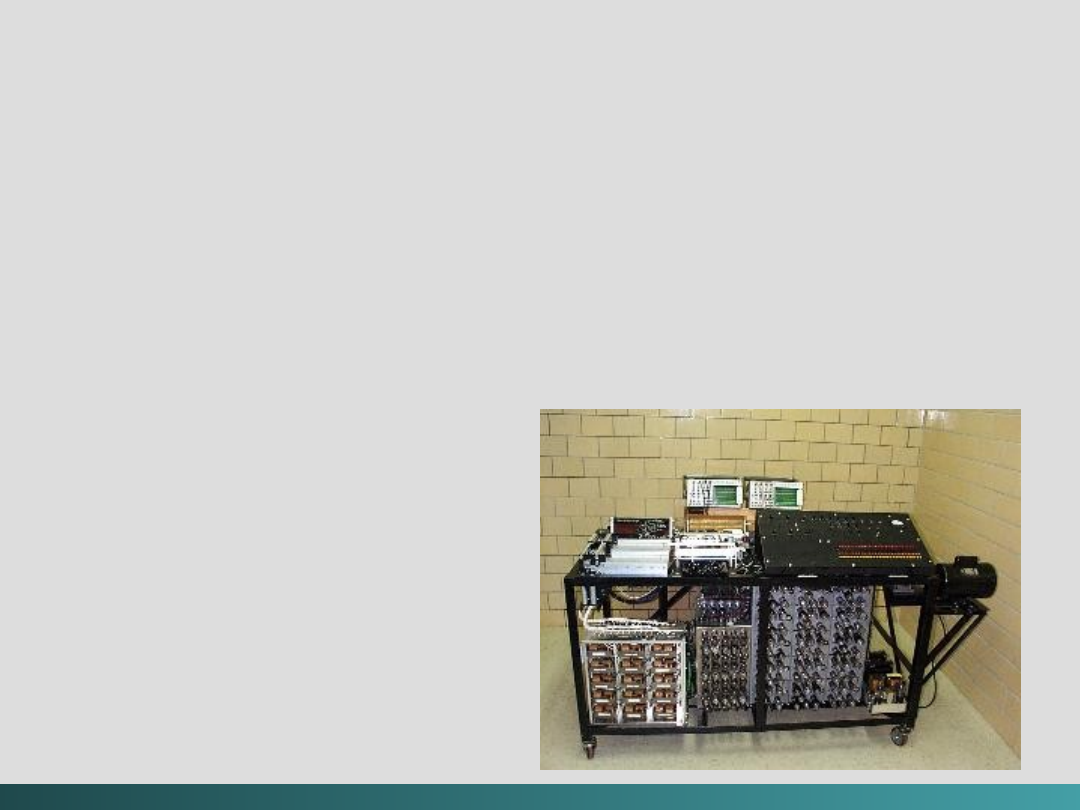
Generacja Pierwsza
- Komputery na lampach próżniowych (1945 – 1953)
John Atanasof
(1904–1995) zyskał uznanie za
konstrukcję pierwszego kompletnie elektronicznego
komputera -
Atanasof Berry Computer
(John
Atanasof i Cliford Berry)
ABC
był maszyną binarną , zbudowaną na lampach
elektronowych
- do rozwiązywania systemu
równań liniowych; stąd nie może
być nazywany komputerem
ogólnego zastosowania
@Janusz Kosiński, 2005
@Janusz Kosiński, 2005
E
Electronic
N
Numerical
I
Integrator
A
And
C
Computer
E
E
lectronic
N
N
umerical
I
I
ntegrator
A
A
nd
C
C
omputer
Generacja Pierwsza
- Komputery na lampach próżniowych (1945 – 1953)
John Mauchly
(1907–1980) i
J. Presper Eckert
(1929–1995)
zaprojektowali pierwszy, w pełni elektroniczny komputer
cyfrowy ogólnego stosowania
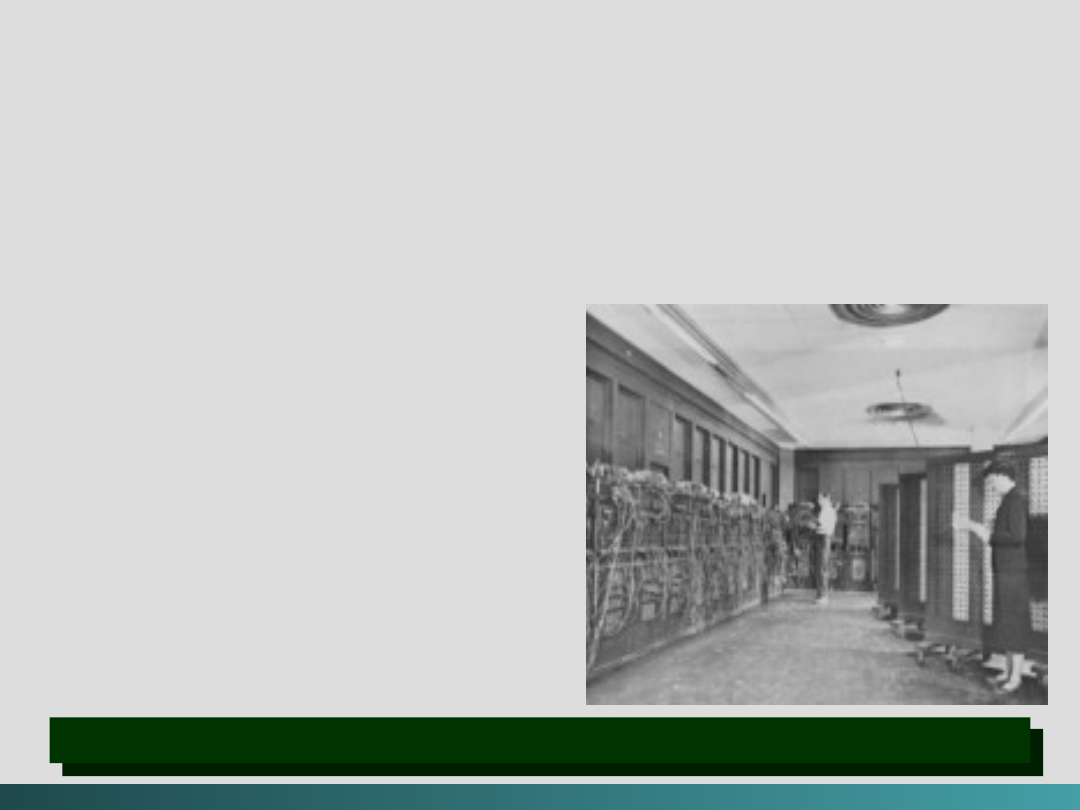
- ENIAC
(1946). Maszyna ta
wykorzystywała
17 468 lamp elektronowych
, zajmowała
1 800 stóp kwadratowych
powierzchni,
ważyła
30 ton
i zużywała
174 KW energii elektrycznej
.
ENIAC miał pamięć o pojemności
około
1 000 bitów
(dla
20
10-cyfrowych
liczb dziesiętnych) i do przechowywania
danych używał kart dziurkowanych.
Generacja Pierwsza
- Komputery na lampach próżniowych (1945 – 1953)
W czasie II Wojny Światowej
, armia USA miała
duże zapotrzebowanie na obliczenia związane z
trajektoriami nowych pocisków armatnich.
Realizacja tego zadania przy pomocy urządzenia
elektronicznego, mogła skrócić obliczanie tablic
balistycznych z dni do minut. Stąd armia byłą
zainteresowana w budowie takiej maszyny.
ENIAC rzeczywiście skrócił czas obliczeń
z 20 godzin
do 30 sekund
, Niestety urządzenie było gotowe
dopiero w 1946 roku – czyli już po wojnie.
@Janusz Kosiński, 2005
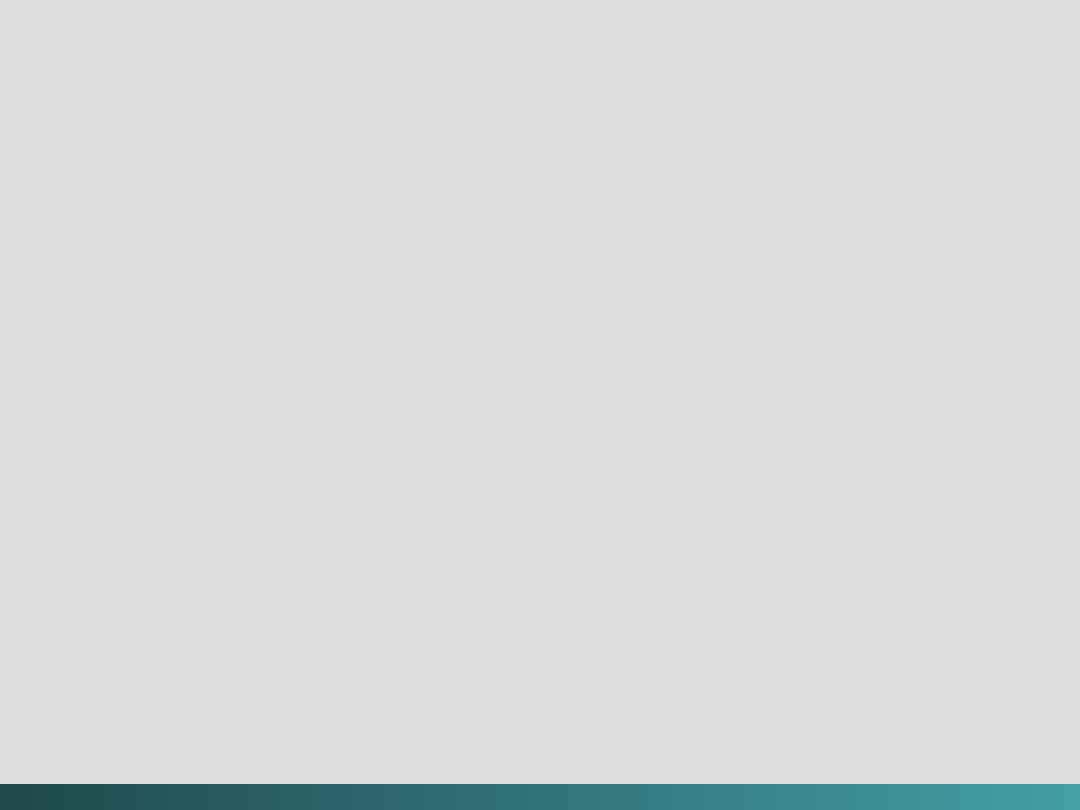
@Janusz Kosiński, 2005
biuletyn armii
Stanów
Zjednoczonych:
U.S. Army
1946
@Janusz Kosiński, 2005
Uniwersytet Harvard - model MARK I (1947)
@Janusz Kosiński, 2005
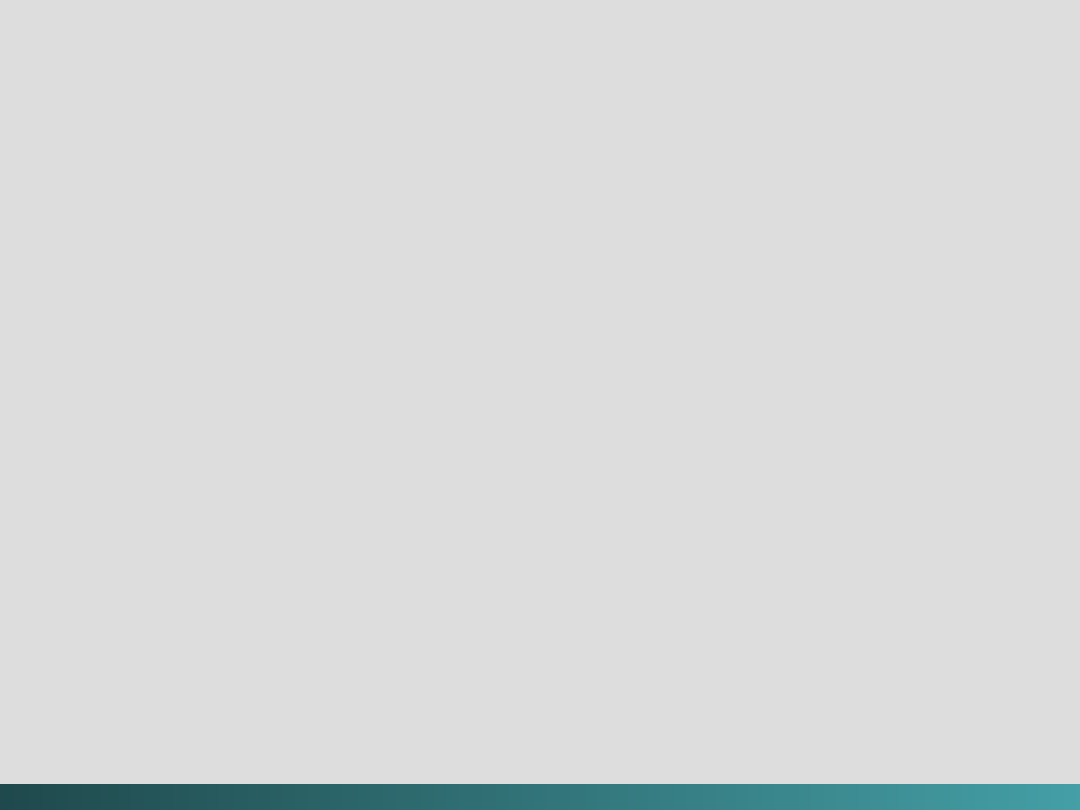
Czym jest lampa elektronowa?
Świat WWW, jaki dziś znamy powstał jako
konsekwencja wynalezienia prostego
urządzenia, nazywanego przez Amerykanów
rurą próżniową
(vacuum tube), a przez
Brytyjczyków
- zaworem
(valve).
Lampa elektronowa steruje przepływem
elektronów, (niektóre lampy elektronowe
połowy dwudziestego wieku nie były próżniowe,
lecz zawierały gazy przewodzące prąd – np,
pary rtęci, stanowiące pożądane środowisko dla
przepływu prądu).
@Janusz Kosiński, 2005
Czym jest lampa elektronowa?
Badanie zjawisk elektrycznych
umożliwiających pracę lamp
elektronowych było konsekwencją
wynalazku
T. A. Edisona
– żarówki.
W 1911, Owen Willams
Richardson analizując te zjawisko,
nazwał je
termoemisją
elektronów.
Lee de Forest – pierwsza trioda
Generacja Druga
- Komputery na tranzystorach (1954 – 1965)
Technologia lamp elektronowych
nie była w pełni
godna zaufania, Krytycy ENIAC-a uważali, że system
nigdy nie będzie działać – lampy wcześniej ulegną
spaleniu nim zostaną wymienione.
Chociaż rzeczywistość systemu była inna, niż
wieszczyli to „prorocy”, to jednak częstotliwość
awarii była większa niż częstotliwość „powodzeń”.
@Janusz Kosiński, 2005
Generacja Druga
- Komputery na tranzystorach (1954 – 1965)
W 1948,
trzej badacze z Bell Laboratories
–
John Bardeen,
Walter Brattain,
William Shockley
wynaleźli
tranzystor,
Ta nowa technologia nie tylko zrewolucjonizowała mnóstwo urządzeń
(radioodbiorniki, telewizory) ale popchnęła przemysł komputerowy
na ścieżkę drugiej generacji
@Janusz Kosiński, 2005
@Janusz Kosiński, 2005
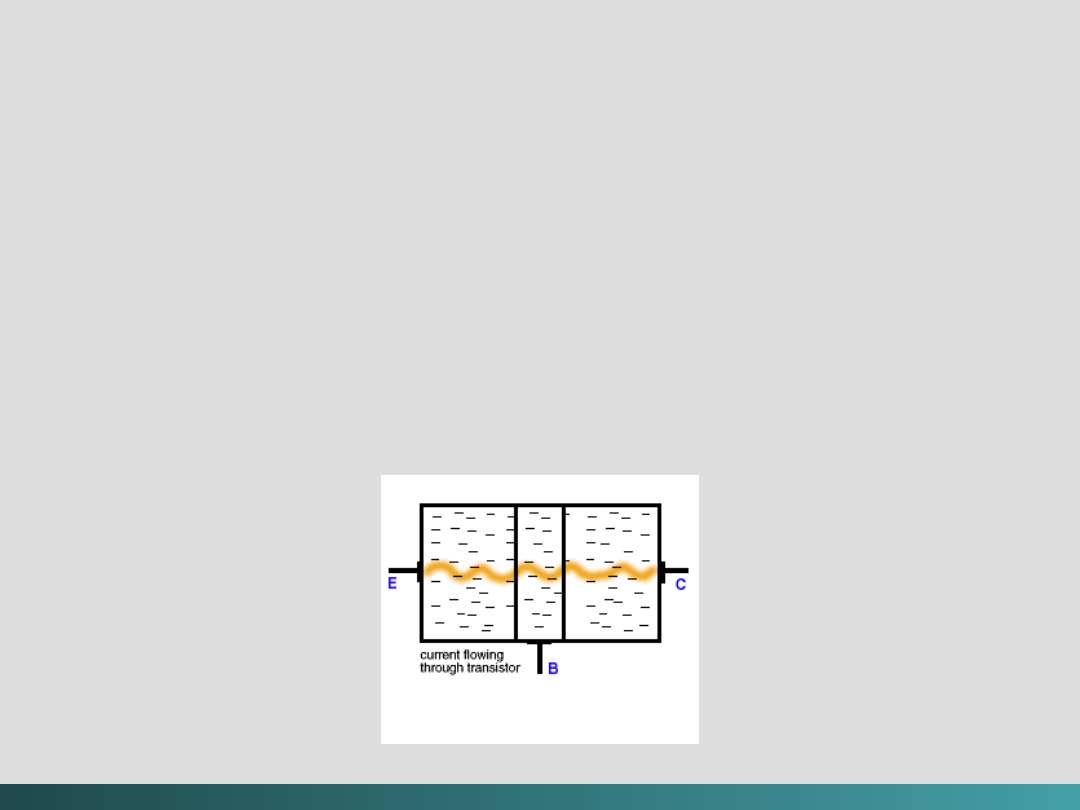
Czym jest Tranzystor ?
Tranzystor
– skrót (ang,) od
transfer resistor
- jest
wersją
triody w stanie stałym. Ponieważ elektrony
lepiej
przemieszczają się w ośrodkach
stałych (solidnych)
niż w próżni czy gazach, nie
potrzebują dodatkowych
elementów, takich jak
siatka sterująca w triodach.
@Janusz Kosiński, 2005
Czym jest Tranzystor ?
Stosowany jest german albo krzem – oba te
pierwiastki stanowią bazę „solidnego” zachowania się
elektronów. W czystej formie, żaden z tych
pierwiastków nie jest dobrym
przewodnikiem elektryczności. Ale kiedy
są one
„domieszkowane”
niewielkimi
(śladowymi) ilościami pierwiastków
sąsiadujących z nimi w układzie
okresowym, stają się przewodnikami
elektryczności w sposób
sterowany
,
Generacja Trzecia
Komputery na obwodach scalonych (1965 – 1980)
Rzeczywista eksplozja w wykorzystaniu
komputerów przyszła razem z pojawieniem się
obwodów scalonych.
Jack Kilby
- wynalazca pierwszego obwodu
scalonego - IC (microchip),
wykonanego
z germanu,
Robert Noyce
- podobne urządzenie wykonane z
krzemu. Komputery stały się szybsze i tańsze –
korzyści w procesie przetwarzania.
Komputery rodziny IBM System/360 -
pierwsze systemy komercyjne z półprzewodnikami.
@Janusz Kosiński, 2005
@Janusz Kosiński, 2005
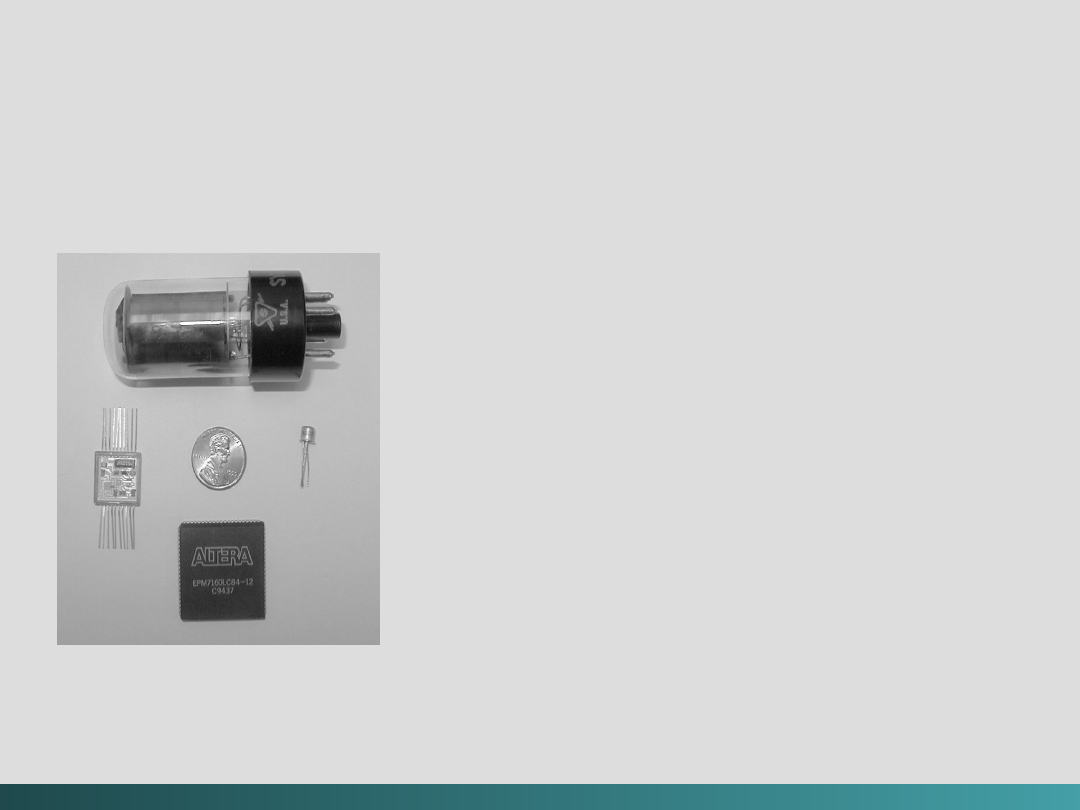
Generacja Trzecia
-
Komputery na obwodach scalonych (1965 – 1980)
Porównanie elementów - zgodnie z
ruchem wskazówek zegara
:
1) Lampa elektronowa
2) Tranzystor
3) Chip zawierający 3 200 2-
wejściowych
bramek NAND
4) Obwód scalony – w środku
moneta 10
pensowa
@Janusz Kosiński, 2005
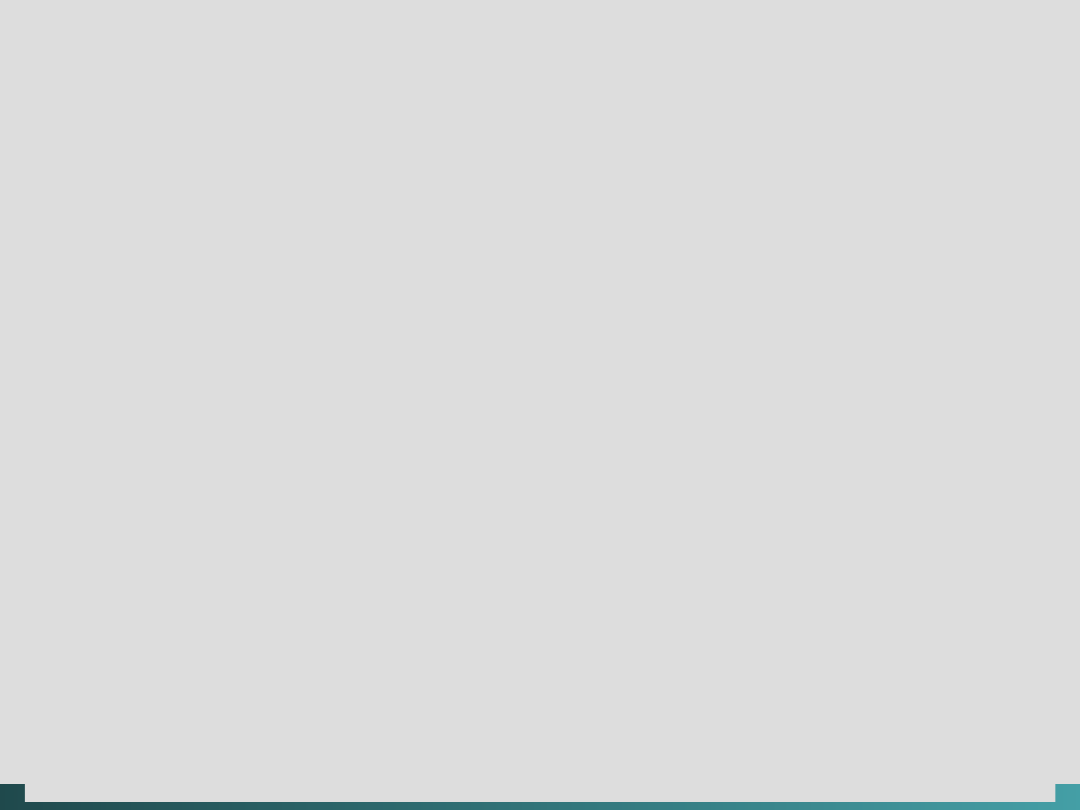
Generacja Czwarta -
Komputery VLSI (1980 – ????)
Obecnie są wykorzystywane cztery poziomy w skali
integracji (liczby elementów w chipie):
SSI -
mała skala integracji:
10 do 100 elementów
na chip
MSI -
średnia skala integracji:
100 do 1 000 elementów
na
chip
LSI -
duża skala integracji:
1 000 do 10 000 elementów
na
chip
VLSI -
bardzo duża skala integracji:
ponad 10 000
elementów
na chip – powstanie komputerów czwartej
generacji.
(w roku 1997 studenci Uniwersytetu Pensylwania zrobili
odpowiednik ENIAC-a w postaci mikrochipu – był on wielkości
paznokcia kciuka i miał około 174 000 tranzystorów – o rząd
wielkości wyżej niż liczba lamp w Eniacu).
@Janusz Kosiński, 2005
Generacja Czwarta -
Komputery VLSI (1980 – ????)
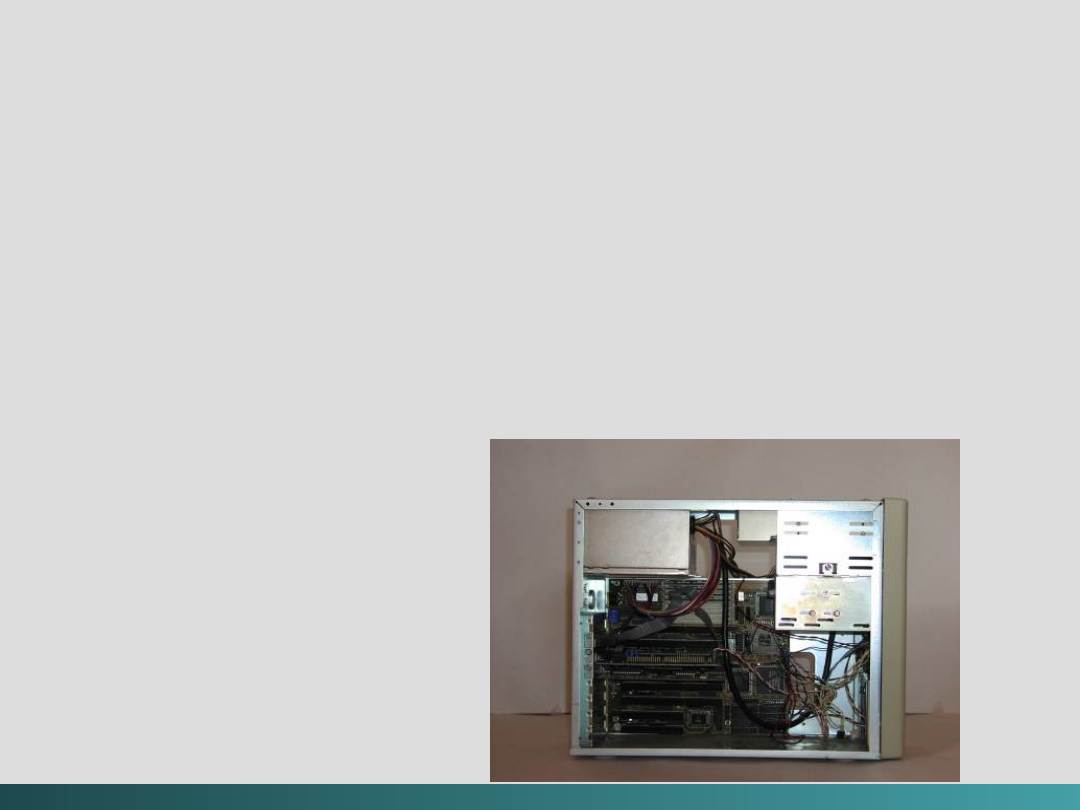
@Janusz Kosiński, 2005
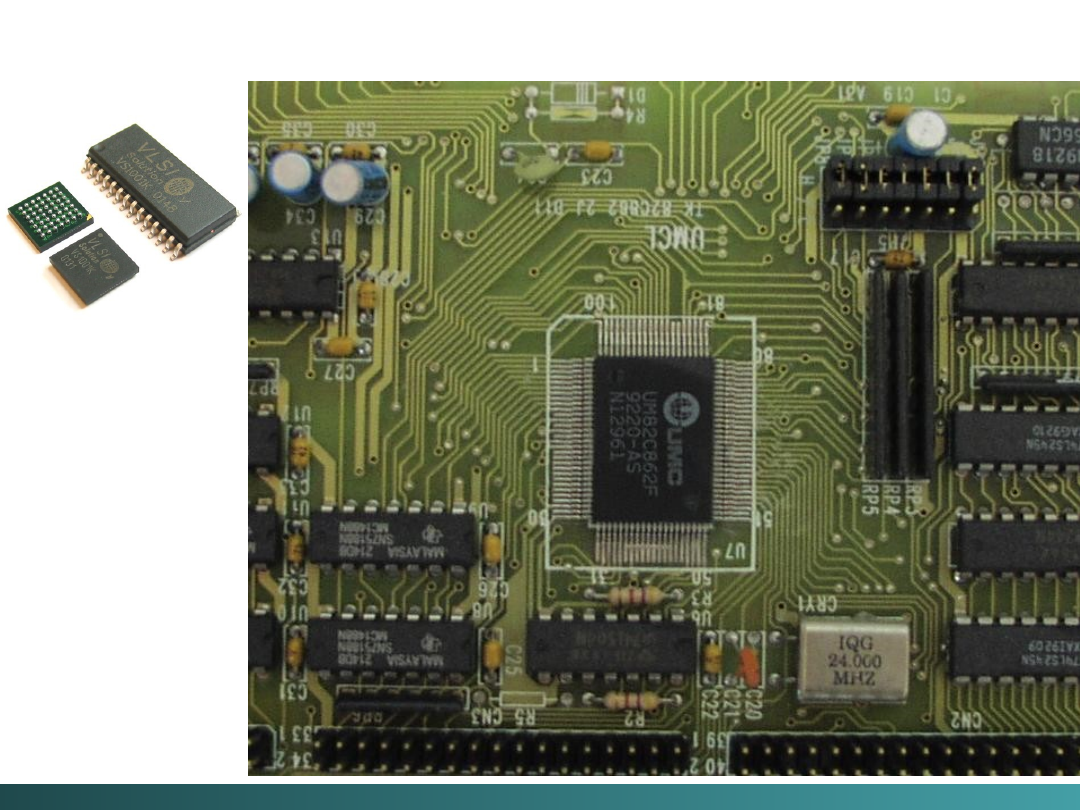
Generacja Czwarta -
Komputery VLSI (1980 – ????)
INTEL
stworzył w 1971 pierwszy procesor
(4004)
Pierwszym mikrokomputerem był
Altair 8800,
wyprodukowany w 1975 przez firmę Micro
Instrumentation and Telemetry Corporation
Później nastąpiły
Apple I, Apple II, Commodore PET
i Vic 20
W 1981 IBM wprowadził na rynek
pierwszy
PC
(Personal Computer)
@Janusz Kosiński, 2005
Generacja Czwarta -
Komputery VLSI (1980 – ????)
@Janusz Kosiński, 2005
Jeżeli maszyna ma być zdolna do rozwiązywania
szerokiej gamy problemów to powinna
wykonywać programy napisane w różnych
językach, od
FORTRAN-u i C do LISP-u i
PROLOG-u.
Między fizycznymi składnikami a językami
wysokiego poziomu takimi jak C++, istnieje
luka
semantyczna
.
Żeby system komputerowy był praktyczny, ta
luka
semantyczna musi być niewidoczna dla
użytkownika
tego systemu.
Hierarchia poziomów komputera
@Janusz Kosiński, 2005
Doświadczenie programistyczne uczy, że
kiedy problem jest duży należy podzielić go na
mniejsze części
–
zastosować
metodę „dziel i rządź”
–
części te tworzą wyodrębnione moduły,
wymagające odpowiednich „interfejsów”
pozwalających na współpracę miedzy nimi.
Hierarchia poziomów komputera
@Janusz Kosiński, 2005
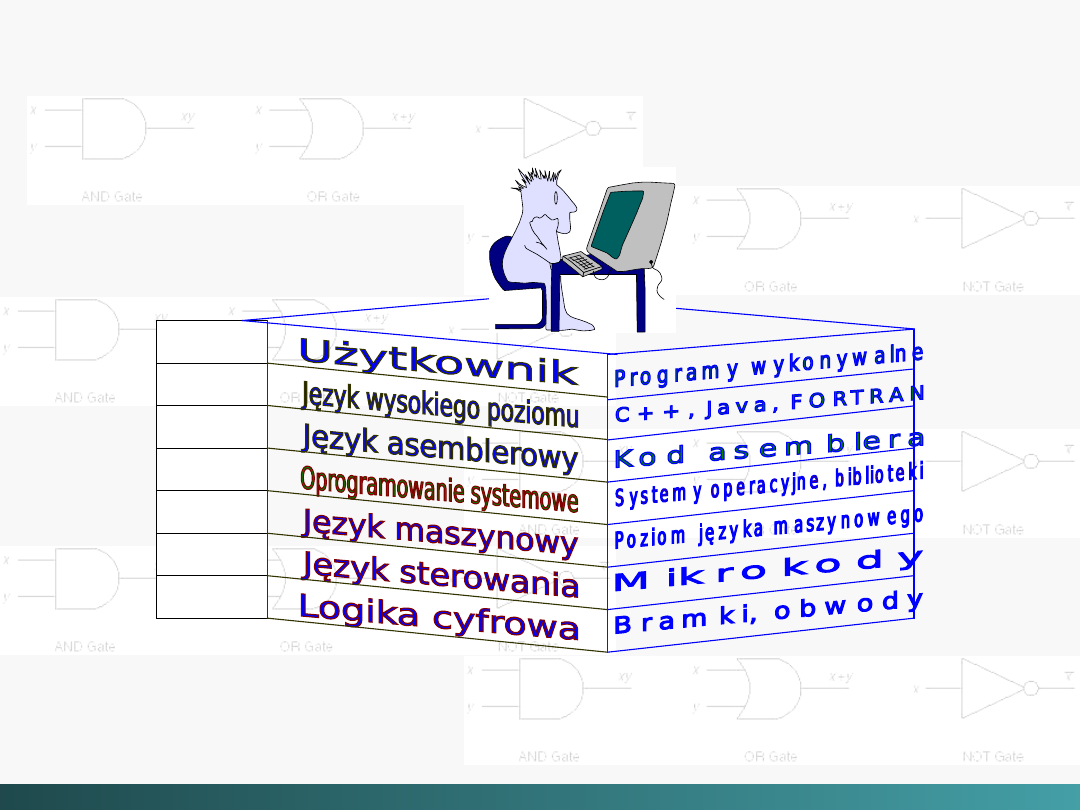
Organizacja systemu komputerowego powinna być
realizowana w podobny sposób – maszynę
(komputer) można przedstawić jako pewną
hierarchię zbudowaną z kilku poziomów
, z
których każdy posiada specyficzne funkcje i istnieje
jako wyodrębniona hipotetyczna maszyna.
Taki
hipotetyczny komputer
na każdym poziomie
nosi nazwę
„maszyny wirtualnej”
– wykonującej
(każda) własne zbiory instrukcji.
Hierarchia poziomów komputera
@Janusz Kosiński, 2005
Hierarchia poziomów komputera
Poziom 6
Poziom 6
Poziom 5
Poziom 5
Poziom 4
Poziom 4
Poziom 3
Poziom 3
Poziom 2
Poziom 2
Poziom 1
Poziom 1
Poziom 0
Poziom 0
@Janusz Kosiński, 2005
Hierarchia poziomów komputera
Poziom 6 - poziom użytkownika:
jest skomponowany z aplikacji, powszechnie
stosowanych, takich jak edytory tekstów,
pakiety graficzne czy gry.
Z tego poziomu poziomy niższe nie są
widoczne.
@Janusz Kosiński, 2005
Hierarchia poziomów komputera
Poziom 5 - języki wysokiego poziomu:
zawiera takie języki jak
C, C++, FORTRAN, LISP,
Pascal i Prolog
. Języki te muszą być tłumaczone
przy zastosowaniu raczej kompilatorów niż
interpretatorów (interpreterów) do języka, który
będzie zrozumiały dla maszyny.
Języki skompilowane są tłumaczone na język asemblerowy i dalej
„montowane” do kodu maszynowego, (są tłumaczone do języka
niższego poziomu). Użytkownik tego poziomu widzi niewiele z
poziomów niższych. Nawet, jeżeli programista musi znać typy
danych i instrukcje z nimi związane, to nie musi nic wiedzieć o o
tym jakie typy aktualnie są aktualnie realizowane
(implementowane).
@Janusz Kosiński, 2005
Hierarchia poziomów komputera
Poziom 4 - poziom języka asemblera:
zawiera kilka typów języka montażowego
(gromadzenia), Języki wysokiego poziomu są
najpierw tłumaczone do asemblera a potem do
kodu maszynowego. Tu występuje tłumaczenie
„jeden do jednego”, co oznacza że jedna
instrukcja asemblera jest tłumaczona na jedną
instrukcję kodu maszynowego.
Dzięki zastosowaniu oddzielnych poziomów, możliwe jest
zmniejszenie wspomnianej wcześniej „luki semantycznej” między
językami wysokiego poziomu a a aktualnym językiem
maszynowym, który zawiera tylko „0” i „1”.
@Janusz Kosiński, 2005
Hierarchia poziomów komputera
Poziom 3 - poziom oprogramowania systemowego:
„radzący sobie”
z instrukcjami systemu
operacyjnego.
Ten poziom jest odpowiedzialny za
synchronizację procesów, multiprogramowanie,
ochronę pamięci i za wiele innych funkcji.
Często instrukcje tłumaczone z asemblera na język maszynowy
„przechodzą” przez ten poziom niezmienione.
@Janusz Kosiński, 2005
Hierarchia poziomów komputera
Poziom 2 - poziom języka maszynowego:
poziom instrukcji ustalających architekturę
(ISA)
nazywany też poziomem maszynowym, zawiera
język maszynowy, rozpoznawany przez
poszczególne składniki architektury systemu
komputerowego.
Programy napisane w języku maszynowym, dla komputerów z
wbudowanym układem sterowania, mogą być wykonywane
bezpośrednio bez potrzeby interpretatorów, kompilatorów i
edytorów.

@Janusz Kosiński, 2005
Hierarchia poziomów komputera
Poziom 1 - poziom sterowania:
jest tym poziomem na którym jednostka
sterująca nabiera pewności że instrukcje są
rozszyfrowane i wykonane poprawnie oraz że
dane są tam gdzie powinny być, i są wtedy
kiedy powinny być,
Jednostka sterująca interpretuje trafiające do niej jednorazowo
instrukcje maszynowe z wyższego poziomu i powoduje
wymaganą akcję.
@Janusz Kosiński, 2005
Hierarchia poziomów komputera
Innym rodzajem opcji kontrolnych są
mikroprogramy.
Mikroprogramem nazywamy program napisany
w języku najniższego poziomu, stosowany
bezpośrednio przez składniki sprzętowe.
Instrukcje maszynowe wytworzone na Poziomie
2, są wprowadzane do tych programów – co
powoduje interpretację języka maszynowego
przez sprzęt.
Jedna instrukcja z poziomu maszynowego jest często
tłumaczona na kilka instrukcji mikrokodu – kody te można łatwo
modyfikować z tym że stosowanie mikroprogramów
(wprowadzanie dodatkowej warstwy) powoduje spowolnienie
wykonywania instrukcji.
@Janusz Kosiński, 2005
Hierarchia poziomów komputera
Poziom 0 - poziom logiki cyfrowej:
jest tym poziomem gdzie można znaleźć
fizyczne składniki systemu komputerowego:
bramki i przewody.
W tym miejscu znajduje się
implementacja
logiki matematycznej,
wspólnej dla wszystkich
systemów komputerowych.
@Janusz Kosiński, 2005
System komputerowy
System komputerowy
Cyfrowy system komputerowy
jest systemem
charakteryzującym się sterowaniem programowym i
przeznaczony jest do automatyzacji procesów
algorytmicznego przetwarzania informacji cyfrowej.
Architekturą systemu komputerowego
nazywamy konfigurację podstawowych programowych
i sprzętowych komponentów systemu, w której zostały
uwzględnione wykonywane funkcje i cechy
charakterystyczne każdej części składowej, jak także
współdziałanie tychże części.
@Janusz Kosiński, 2005
System komputerowy
Programem
nazywamy zbiór instrukcji, których
wykonanie w określonej kolejności zapewnia
odpowiednie przetworzenie informacji.
Instrukcja
(rozkaz) jest słowem maszynowym
zawierającym informację o wykonywanej operacji,
miejscu w pamięci gdzie znajdują się operandy,
rezultat i następny rozkaz.
@Janusz Kosiński, 2005
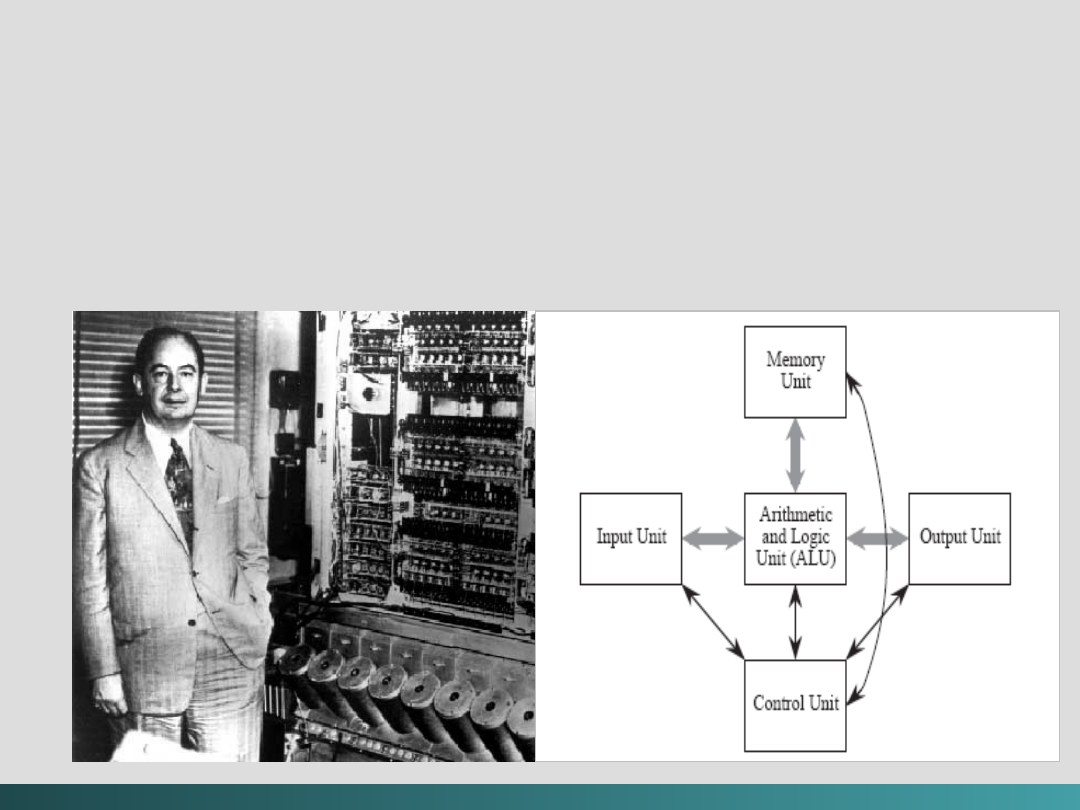
System komputerowy
Większość współczesnych systemów
komputerowych została zbudowana w oparciu o
architekturę von Neumann’a.
@Janusz Kosiński, 2005
Struktura systemu komputerowego von Neumann’a
Von Neumann w 1946 roku po raz pierwszy określił
zasady w jaki sposób jest sterowany uniwersalny
system komputerowy.
System taki powinien:
Mieć skończoną i funkcjonalnie pełną listę rozkazów;
Mieć możliwość wprowadzenia programu do systemu
komputerowego poprzez urządzenia zewnętrzne i jego
przechowywanie w pamięci w sposób identyczny jak
danych;
Dane i instrukcje w takim systemie powinny być jednakowo
dostępne dla procesora;
Informacja jest tam przetwarzana dzięki sekwencyjnemu
odczytywaniu instrukcji z pamięci komputera i wykonywaniu
tych instrukcji w procesorze.
@Janusz Kosiński, 2005
Struktura systemu komputerowego von Neumann’a
Podane warunki pozwalają przełączać system
komputerowy z wykonania jednego zadania
(programu) na inne bez fizycznej ingerencji w
strukturę systemu, a tym samym gwarantują jego
uniwersalność.
System komputerowy von Neumann’a nie posiada
oddzielnych pamięci do przechowywania danych i
instrukcji. Instrukcje jak i dane są zakodowane w
postaci liczb.
Bez analizy programu trudno jest określić czy dany
obszar pamięci zawiera dane czy instrukcje.
Wykonywany program może się sam modyfikować
traktując obszar instrukcji jako dane, a po
przetworzeniu tych instrukcji - danych - zacząć je
wykonywać.
@Janusz Kosiński, 2005
@Janusz Kosiński, 2005
Struktura systemu komputerowego von Neumann’a
EDVAC (Electronic Discrete Variable Automatic
EDVAC (Electronic Discrete Variable Automatic
Computer)
Computer)
1949
1949
CPU
Rejestry
Rejestry
Rejestry
Rejestry
Licznik
Licznik
Licznik
Licznik
Jednostka
Jednostka
arytmetyczn
arytmetyczn
o - logiczna
o - logiczna
Jednostk
Jednostk
a
a
kontroln
kontroln
a
a
Jednostk
Jednostk
a
a
kontroln
kontroln
a
a
Pamięć
Pamięć
główna
główna
System
System
Wejścia / Wyjścia
Wejścia / Wyjścia
@Janusz Kosiński, 2005
Struktura systemu komputerowego von Neumann’a
Struktura systemu komputerowego von Neumann’a
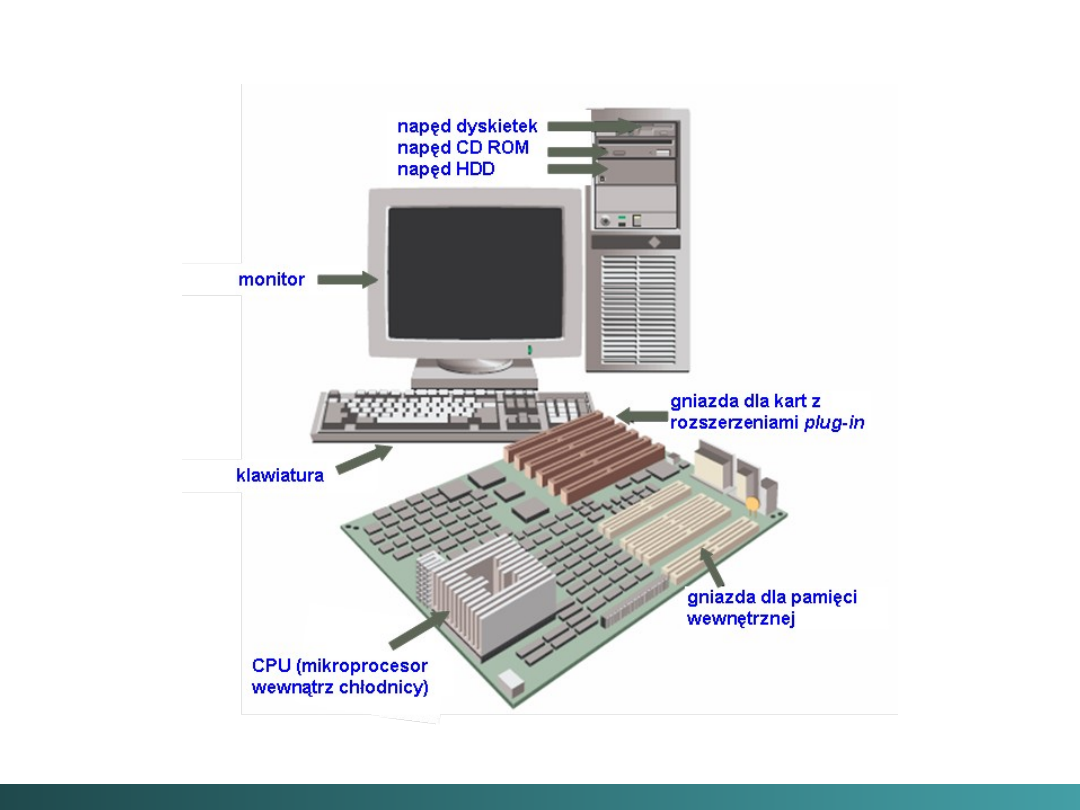
System komputerowy składa się z trzech podstawowych części
połączonych magistralą systemową:
1. Pamięci podstawowej
2. Procesora
3. Urządzeń zewnętrznych
Pamięć podstawowa jest przeznaczona do przechowywania
programów i danych. Fizycznie pamięć ta podzielona jest na
dwie części: pamięć operacyjną (RAM), do której informacja
może być zapisywana i odczytywana; oraz pamięć (ROM) -
przeznaczoną tylko do odczytu.
Do urządzeń zewnętrznych zaliczamy urządzenia wejścia,
urządzenia wyjścia i pamięć masową - dyski, streamer’y,
CD-ROM’y itd..
@Janusz Kosiński, 2005
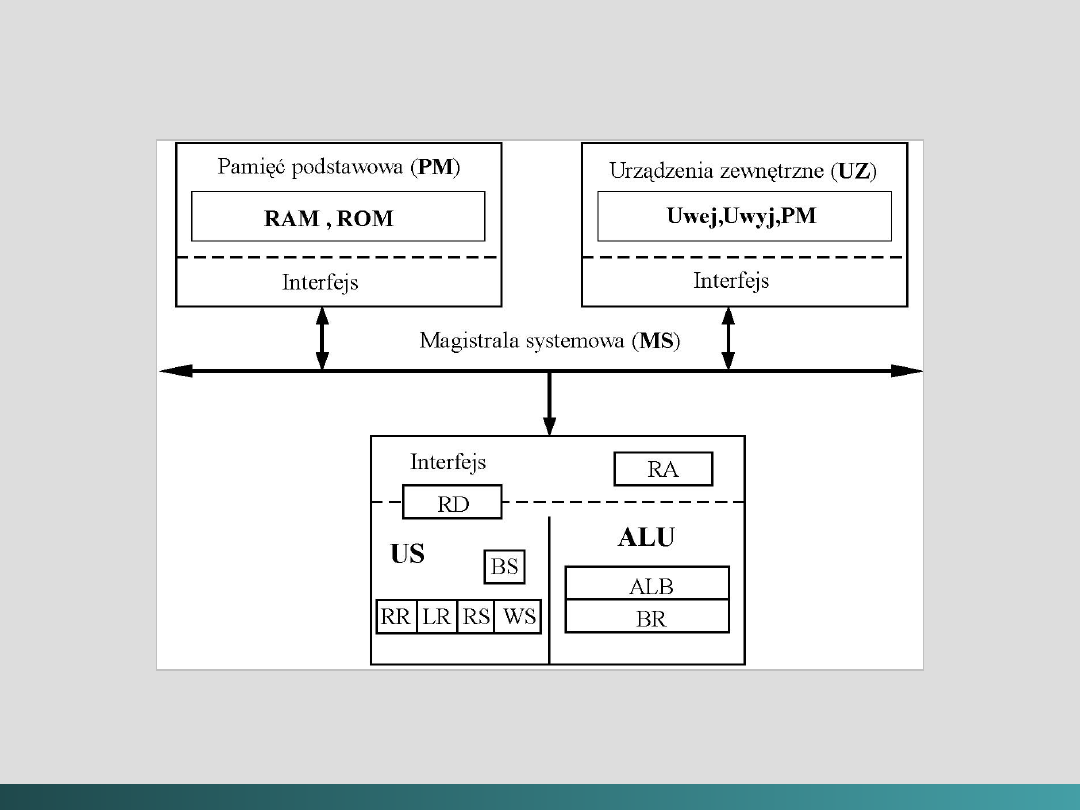
Struktura systemu komputerowego von Neumann’a,
@Janusz Kosiński, 2005
@Janusz Kosiński, 2005
Idea zaprezentowana w architekturze von
Neumann’a
może być rozszerzona
w taki
sposób, że programy i dane magazynowane w
powolnych (co do dostępu) środkach
magazynowania – takich jak dysk twardy (
hard
disk
) mogą być kopiowane do nietrwałych, ale o
szybkim dostępie, środków takich jak
RAM
przed
samym procesem wykonania.
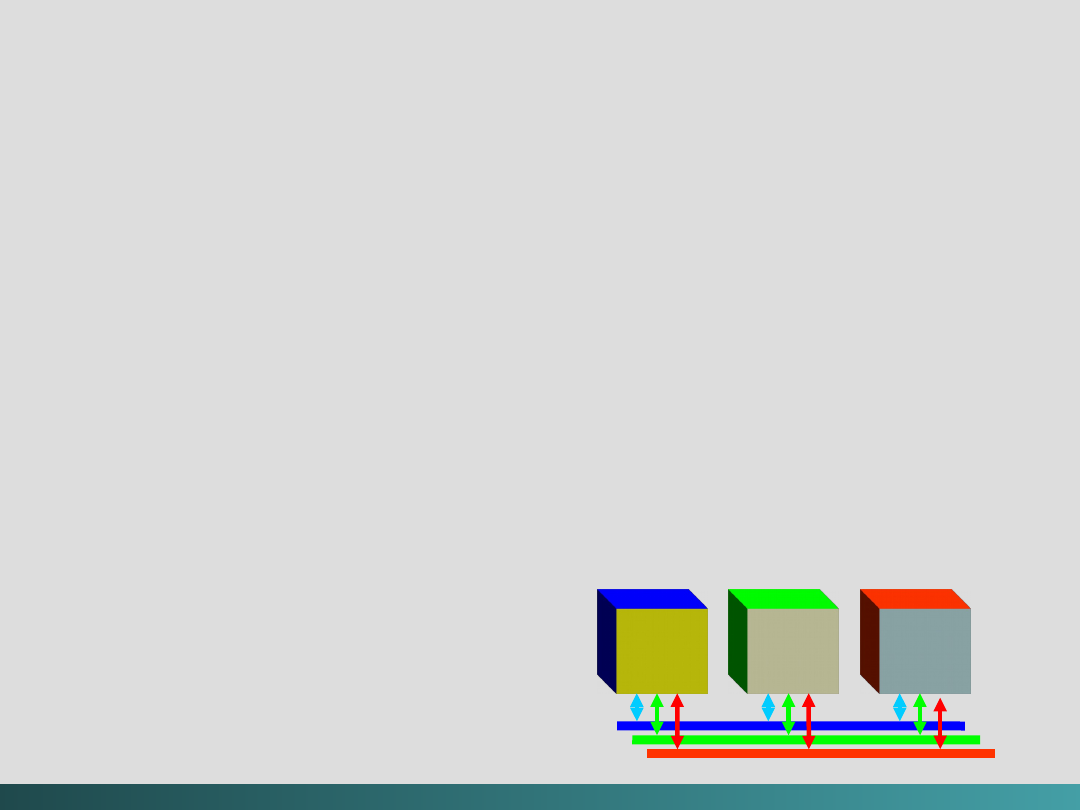
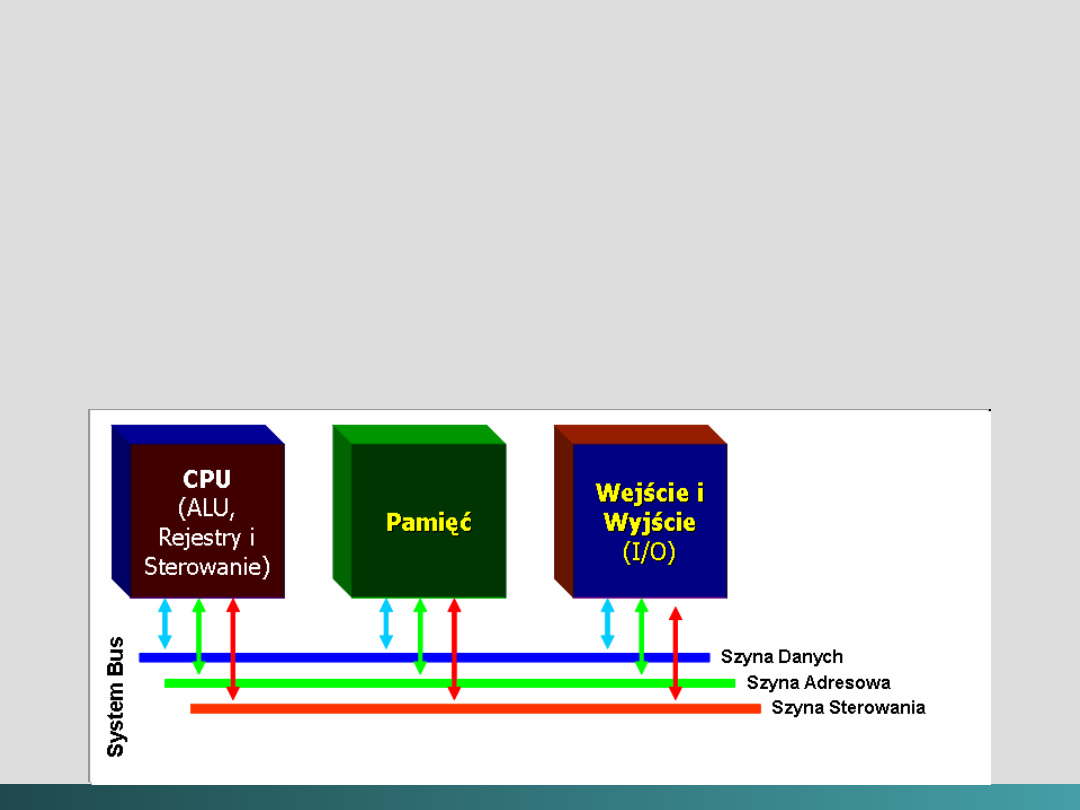
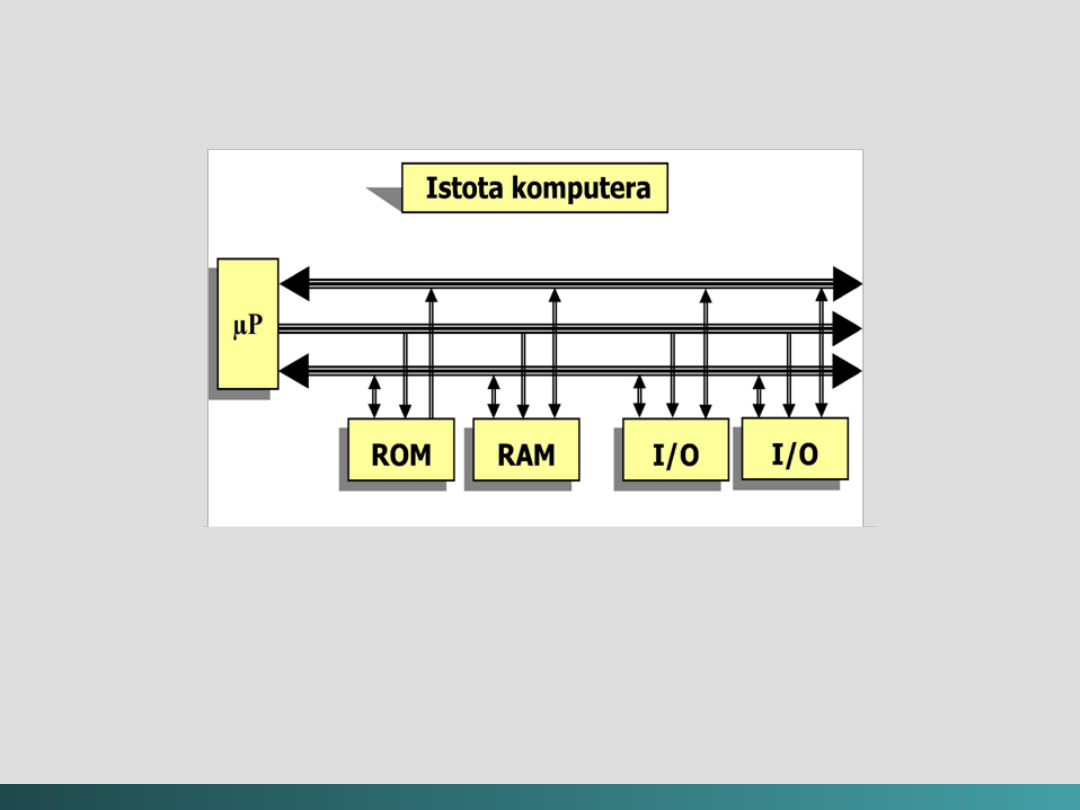
Ta architektura może być również usprawniana wewnątrz
dzięki zastosowaniu modelu
szyn zbiorczych (magistral)
CPU
CPU
(ALU,
(ALU,
Rejestry i
Rejestry i
Sterowanie
Sterowanie
)
)
Pamięć
Pamięć
Wejście i
Wejście i
Wyjście
Wyjście
(I/O)
(I/O)
@Janusz Kosiński, 2005
Model szyn zbiorczych (System Bus Model)
Szyna danych
przemieszcza dane między pamięcią
główną a rejestrami CPU – Data Bus
Szyna adresowa
„podtrzymuje” adresy danych do
których szyna danych ma aktualnie dostęp – Address Bus
Szyna sterująca
dostarcza niezbędne sygnały
sterujące transferem danych – Control Bus
@Janusz Kosiński, 2005
Model szyn zbiorczych (
System Bus Model
)
@Janusz Kosiński, 2005
Model szyn zbiorczych (System Bus Model)
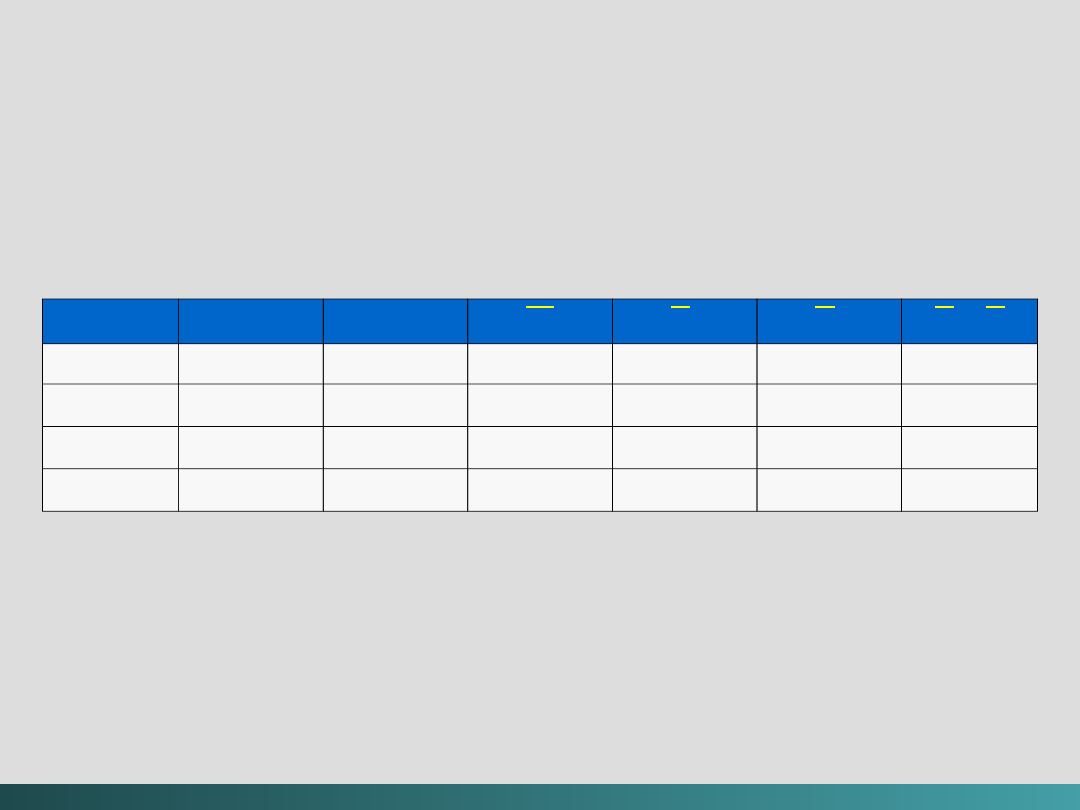
SPECYFIKACJA
1 017,3
1 017,3
66x4
66x4
32
32
AGP (x4
AGP (x4
mode)
mode)
508,6
508,6
66x2
66x2
32
32
AGP (x2
AGP (x2
mode)
mode)
254,3
254,3
66
66
32
32
AGP
AGP
508,6
508,6
66
66
64
64
64-bit PCI 2,1
64-bit PCI 2,1
127,2
127,2
33
33
32
32
PCI
PCI
127,2
127,2
33
33
32
32
VLB
VLB
31,8
31,8
8,3
8,3
32
32
EISA
EISA
15,9
15,9
8,3
8,3
16
16
16-bit ISA
16-bit ISA
7,9
7,9
8,3
8,3
8
8
8-bit ISA
8-bit ISA
Pasmo
Pasmo
przenoszenia
przenoszenia
(MB/sec)
(MB/sec)
Prędkość
Prędkość
(MHz)
(MHz)
Szerokość
Szerokość
(bity)
(bity)
BUS
BUS
@Janusz Kosiński, 2005
Modele nie - von Neumannowskie
Projektanci, którzy nie są ograniczeni koniecznością
stosowania się do modelu von Neumanna stosują
różne modele obliczeń:
- sieci neuronowe
- algorytmy genetyczne
- przetwarzanie równoległe,
Pierwsze systemy
do obliczeń równoległych
były
zaprojektowane w końcu lat 1960 – posiadały dwa
procesory
@Janusz Kosiński, 2005
Modele nie - von Neumannowskie
W latach 1970 pojawił się wstęp do
superkomputerów
w postaci maszyny 32
procesorowej, zaś w latach 1980 – systemu 1 000
procesorowego.
W roku 1999 IBM ogłosił skonstruowanie
supersystemu
z ponad 1 000 000 procesorów -
każdy z tych procesorów z
pamięcią dedykowaną
(wydzieloną do odrębnych zadań).
Ale i przetwarzanie równoległe ma swoje ograniczenia – ze
wzrostem liczby procesorów powstaje konieczność „wstawiania”
procesorów zarządzających
pozostałymi procesorami i
zasobami.
Reprezentacja danych w systemach
Reprezentacja danych w systemach
komputerowych
komputerowych
Reprezentacja danych w systemach
Reprezentacja danych w systemach
komputerowych
komputerowych
2
2
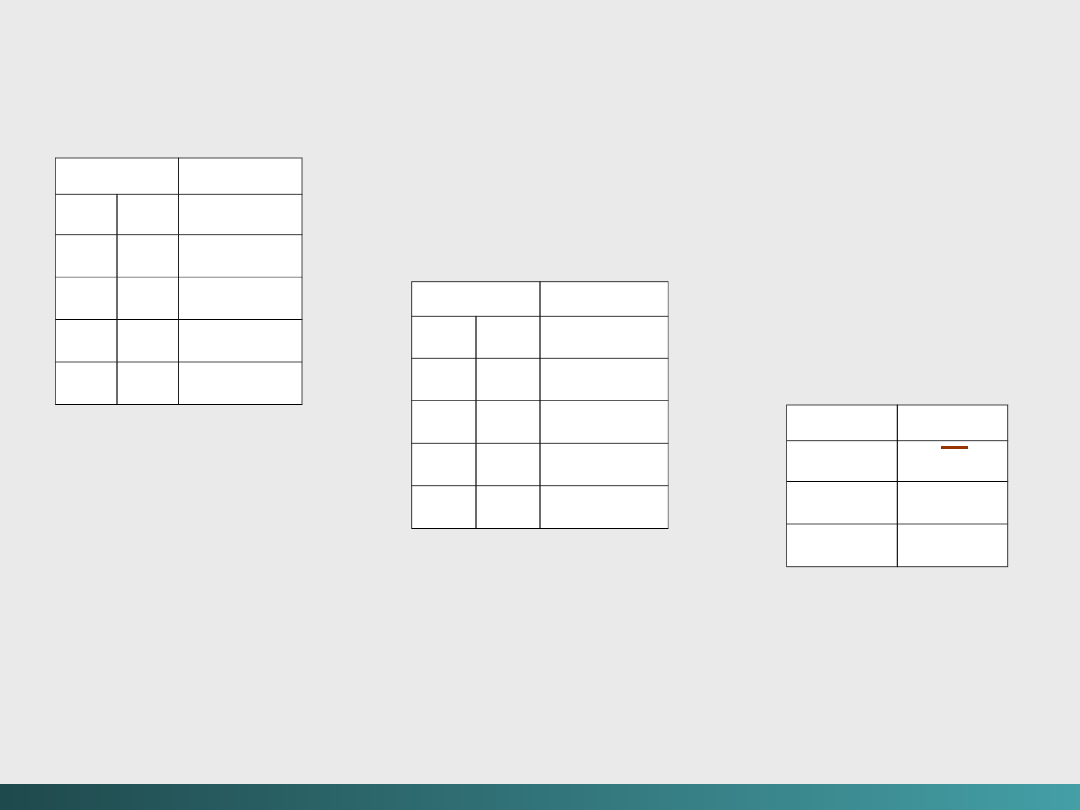
243,51
10
= 2 x 10
2
+ 4 x 10
1
+ 3 x 10
0
+ 5 x 10
-1
+ 1 x
10
-2
212
3
= 2 x 3
2
+ 1 x 3
1
+ 2 x 3
0
= 23
10
10110
2
= 1 x 2
4
+ 0 x 2
3
+ 1 x 2
2
+ 1 x 2
1
+ 0 x 2
0
=
22
10
@Janusz Kosiński, 2005
Potęgi 2
dziesiętne
binarne
4-bity
szesnastkow
e
2
-2
= ¼ = 0,25
0
0000
0
2
-1
=
1
/2 = 0,5
1
0001
1
2
0
= 1
2
0010
2
2
1
= 2
3
0011
3
2
2
= 4
4
0100
4
2
3
= 8
5
0101
5
2
4
= 16
6
0110
6
2
5
= 32
7
0111
7
2
6
= 64
8
1000
8
2
7
= 128
9
1001
9
2
8
= 256
10
1010
A
2
9
= 512
11
1011
B
2
10
= 1 024
12
1100
C
2
15
= 32 768
13
1101
D
2
16
= 65 536
14
1110
E
15
1111
F
Liczbowe systemy
pozycyjne
Podstawowa idea opiera
się na tym,
że wartość liczby jest
reprezentowana
przez wzrastające
potęgi pewnych baz:
Reprezentacja
danych w
systemach
komputerowych

@Janusz Kosiński, 2005
Reprezentacja danych w systemach komputerowych
Liczby całkowite
Przedstawione na poprzednim slajdzie liczby należą do liczb
całkowitych
nieujemnych
(unsigned integer):
Liczby całkowite -
również i ujemne
(signed integer)
-
wymagają dodatkowych informacji, aby mogły być poprawnie
zaadresowane
W wielu językach programowania następuje automatyczna
alokacja miejsca przechowującego
bit znaku
Stosowana konwencja – skrajny lewy bit wskazuje znak
liczby.
Jeżeli jest to „1” to mamy do czynienia z liczbą ujemną – jeżeli
„0” to z liczbą dodatnią.
@Janusz Kosiński, 2005
Reprezentacja danych w systemach komputerowych
Np, w 8 bitowym słowie
-1
jest reprezentowane jako
10000001
zaś
+1
jest reprezentowane jako
00000001
W systemach komputerowych stosujących taką reprezentację
dla 8 bitów przechowujących liczby całkowite, 7 bitów może być
wykorzystanych do aktualnej reprezentacji liczby.
01111111 → 2
6
+ 2
5
+ 2
4
+ 2
3
+ 2
2
+ 2
1
+ 2
0
= 127
„0” na pierwszej pozycji oznacza liczbę dodatnią
11111111 → - (2
6
+ 2
5
+ 2
4
+ 2
3
+ 2
2
+ 2
1
+ 2
0
)
= -
127
„1” na pierwszej pozycji oznacza liczbę ujemną
Stąd:
N bitów może reprezentować liczby od - 2
(N – 1)
- 1 do 2
(N – 1)
-
1
@Janusz Kosiński, 2005
Reprezentacja danych w systemach komputerowych
dodajemy
01001111
2
(79) do
00100011
2
(35) 01001111
2
+ 00100011
2
= 01110010
2
(114)
1 1 1 1
przesunięcie
0
1 0 0 1 1 1 1
( 7 9 )
0 + 0 1 0 0 0 1 1
+ ( 3 5 )
0
1 1 1 0 0 1 0
( 1 1 4 )
Odejmujemy
01001111
2
(79)
od 01100011
2
(99) 01100011
2
- 01001111
2
= 00010100
2
(20)
0 1 1 2
pożyczanie
0
1
1 0 0 0
1 1
( 9 9 )
0 - 1 0 0 1 1 1 1
- ( 7 9 )
0
0 0 1 0 1 0 0
( 2 0 )
odejmujemy
01100011
2
(99) od
01001111
2
(79) 01001111
2
- 01100011
2
= 10010100
2
(-20)
1. Sprawdzamy, która liczba jest większa
2. Odejmujemy mniejszą od większej
3. Zmieniamy wartość pierwszego bitu (z „0” na „1”)
@Janusz Kosiński, 2005
Reprezentacja danych w systemach komputerowych
Dodajemy
Dodajemy
01001111
01001111
2
2
(79) do
(79) do
01100011
01100011
2
2
(99)
(99)
01001111
01001111
2
2
+
+
01100011
01100011
2
2
= 00110010
= 00110010
2
2
(50)
(50)
1
1 1 1 1
przesunięcie
0
1 0 0 1 1 1 1
( 7 9 )
0 + 1 1 0 0 0 1 1
+ ( 9 9 )
0
0 1 1 0 0 1 0
( 5 0 )
Jak widać, przy 8 bitowej reprezentacji otrzymujemy błędny
Jak widać, przy 8 bitowej reprezentacji otrzymujemy błędny
wynik – rezultat zostanie „obcięty”
wynik – rezultat zostanie „obcięty”
?
X
@Janusz Kosiński, 2005
Reprezentacja danych w systemach komputerowych
Dla szybkiego przeliczania z systemu dwójkowego na dziesiętny
wymyślona została pewna metoda polegająca na „dublowaniu”
pierwszego od lewej bitu i dodawaniu do następnego (ang, double–
dabble method).
Obliczenia rozpoczynają się od lewego skrajnego bitu
1
0
0
1
0
0
1
1
2
4
8
18
36
72
146
+0
+0
+1
+0
+0
+1
+1
2
4
9
18
36
73
147
2
2
2
2
2
2
2
2
4
8
18
36
72
146
10010011
2
= 147
10
@Janusz Kosiński, 2005
Reprezentacja danych w systemach komputerowych
odejmujemy:
10011000
2
(-24) od
10101011
2
(-43) 10101011
2
- 10011000
2
= 00010011
2
(19)
0 2
pożyczanie
0
0
1 0
1 0 1 1
( 4 3 )
0 - 0 0 1 1 0 0 0
- ( 2 4 )
0
0 0 0 1 0 1 1
( 1 9 )
Odejmujemy
10101011
2
(-43) od
10011000
2
(-24) 10011000
2
- 10101011
2
= 10010011
2
(-19)
1. Zamieniamy odjemną na liczbę dodatnią
2. Sprawdzamy która liczba jest większa
3. Jeżeli odjemnik jest mniejszy od odjemnej, odejmujemy
mniejszą liczbę od większej i nie zmieniamy pierwszego bitu
4. Jeżeli odjemnik jest większy, odejmujemy mniejszą liczbę od
większej i zmieniamy wartość pierwszego bitu (z „0” na „1”)
Liczby zmiennoprzecinkowe
W rzeczywistym komputerze, przy zastosowaniu słowa
16 bitowego (a więc małego) i pamiętając o bicie
znaku, największą liczbą, jaką możemy uzyskać, jest
32 767,
Chcąc zwiększyć zakres liczby można zastosować
słowo 32 bitowe,
Ale co robić jeżeli będziemy mieli do czynienia z ułamkami?
@Janusz Kosiński, 2005
Reprezentacja danych w systemach komputerowych

Liczby zmiennoprzecinkowe
Prosty model
W komputerach cyfrowych, liczba zmiennoprzecinkowa zawiera
trzy części
: bit znaku, część wykładniczą (reprezentującą
wykładniki potęgi 2) i część ułamkową – nazywaną znaczącą
(liczba znaków po przecinku),
Liczba bitów
stosowanych dla wykładnika i liczby znaków po
przecinku jest zależna od tego, czy chcemy mieć większą
liczbę (liczba bitów dla wykładników) czy większą dokładność
(liczba bitów dla liczby znaków o przecinku),
Dla celów ilustracyjnych dalej będzie pokazywany znormalizowany 14
bitowy model, z tzw, szczeliną 2 bitową
@Janusz Kosiński, 2005
1 bit
1 bit
bit znaku
5 bitów
5 bitów
wykładniki
Liczba znaków po przecinku
8 bitów
8 bitów
Reprezentacja danych w systemach komputerowych
Arytmetyka zmiennoprzecinkowa
Przy dodawaniu dwóch liczb dziesiętnych wyrażanych
w notacji naukowej, takich jak
1,5 x 10
2
+ 3,5 x 10
3
dokonujemy zmiany liczb w taki sposób aby były
wyrażane jako potęgi przy tych samych podstawach:
1,5 x 10
2
+ 3,5 x 10
3
= 0,15 x 10
3
+ 3,5 x 10
3
= 3,65 x 10
3
Dodawanie i odejmowanie zmiennoprzecinkowe działa
według takich samych zasad,
@Janusz Kosiński, 2005
Reprezentacja danych w systemach komputerowych
Arytmetyka zmiennoprzecinkowa
Załóżmy, że chcemy przechować liczbę 17 , Wiemy,
że;
17 = 17,0 x 10
0
= 1,7 x 10
1
= 0,17 x 10
2
Analogicznie w formie binarnej:
17
10
= 10001
2
x 2
0
= 1000,1
2
x 2
1
= 100,01
2
x 2
2
= 10,001
2
x 2
3
= 1,0001
2
x 2
4
= 0,10001
2
x 2
5
Jeżeli zastosujemy ostatnią formułę, część ułamkowa
będzie równa:
10001000
zaś wykładnik
00101
@Janusz Kosiński, 2005
0 0 0 1 0 1 1 0 0 0 1 0 0 0
Reprezentacja danych w systemach komputerowych
Kod BCD
(Binary-Coded Decimal)
jest
numerycznym systemem kodowania
używanym początkowo przez IBM w
komputerach „mainframe” i
systemach średniej wielkości.
Jak wskazuje nazwa, BCD koduje każdą cyfrę
systemu dziesiętnego, do 4 bitowej formy
binarnej, Jednocześnie stosowane jest
kodowanie dodatkowe (strefowe) dla
odróżniania liczb dodatnich, ujemnych i
nieujemnych.
Liczby nieujemne są znakowane kodem 1111
Liczby dodatnie są znakowane kodem 1100
Liczby ujemne są znakowane kodem 1101
@Janusz Kosiński, 2005
Kody znakowe
cyfra
BCD
0
0000
1
0001
2
0010
3
0011
4
0100
5
0101
6
0110
7
0111
8
1000
9
1001
Strefy
1111
Nieujemne
1100
Dodatnie
1101
Ujemne
@Janusz Kosiński, 2005
Reprezentacja liczby -1 265 w 3 bajtach (1 bajt = 8
bitów) przy użyciu tzw. spakowanego BCD.
Kodowanie strefowe dla 1 265 ma postać:
1111
0001
1111
0010
1111
0110 1111 0101
Po spakowaniu, string wygląda następująco:
0001 0010 0110 0101
Po dodaniu kodu znaku po cyfrze najniższego poziomu i swoistym
„wyłączeniu przed nawias” kodu znaku liczby nieujemnej, zapis w
trzech bajtach ma postać:
Kody znakowe
1111
0001 0010
0110 0101
1101
1
0 0 0 0 0 0 0 1 1 1 1 0 0
0 1
Zapis tej samej liczby w słowie 16
bitowym
@Janusz Kosiński, 2005
Kody znakowe
Kod EBCDIC
Przed powstaniem IBM System/360, IBM używał 6
bitowej wersji kodu BCD dla reprezentowania znaków
i liczb.
Kod ten był mocno ograniczony w zakresie możliwości
manipulowania danymi – stąd inżynierowie z IBM
zdecydowali, że najprościej będzie rozszerzyć kod BCD z 6
bitów do 8 bitów.
Ten nowy kod uzyskał nazwę
Extended Binary Coded
Decimal Interchange Code
(EBCDIC).
IBM kontynuuje stosowanie EBCDIC w komputerach
mainframe i systemach komputerowych średniej wielkości.
@Janusz Kosiński, 2005
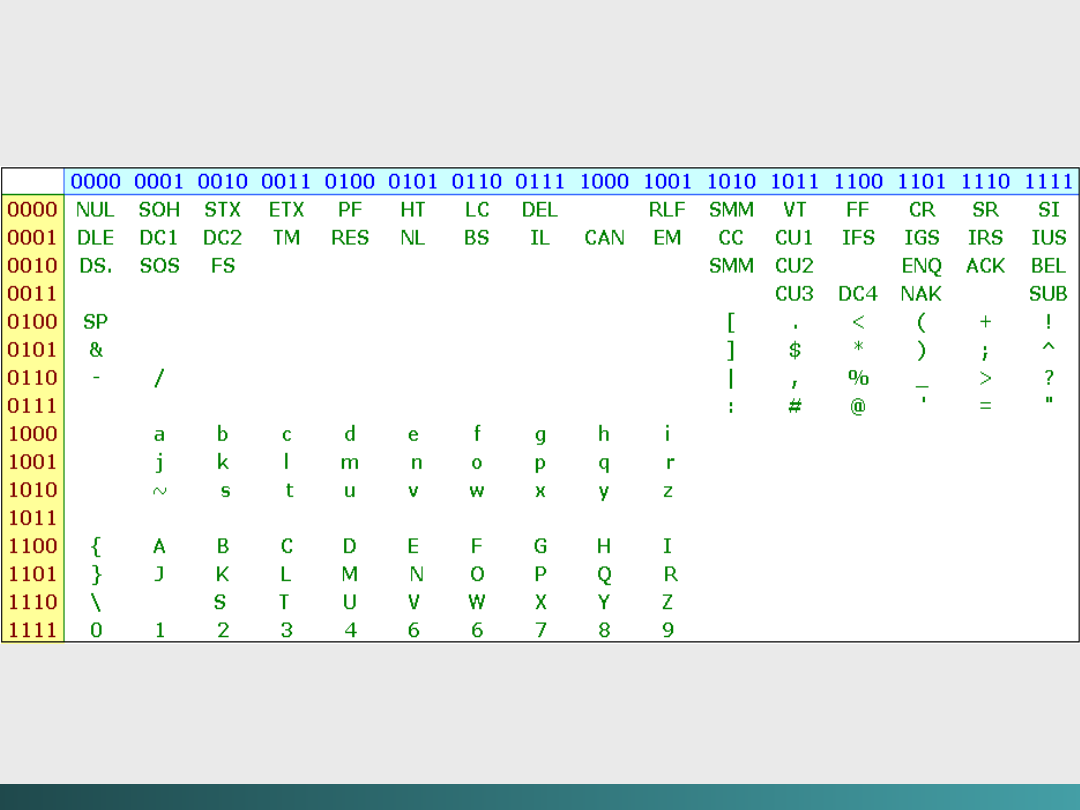
Kody znakowe
Kod
EBCDIC
Stosowane skróty znakowe – opisują czynności wykonywane z treścią
programu
@Janusz Kosiński, 2005
Kody znakowe
Kod ASCII
Podczas gdy IBM był zajęty budową Systemu/360, inni
producenci wyposażenia starali się na znalezieniem
lepszych sposobów transmisji danych między systemami.
American Standard Code for Information
Interchange
(ASCII) jest jednym z produktów tych
wysiłków.
@Janusz Kosiński, 2005
Kody znakowe
Kod ASCII
ASCII jest bezpośrednim potomkiem schematów
kodowania stosowanych w telegrafach (teleksach).
Urządzenia te
wykorzystywały 5 bitowy kod (Murray)
pochodzący od prób
z lat 1880 (Baudet).
International Organization for Standardization (ISO)
zaproponowała 7 bitowy schemat kodowania, nazywany
Międzynarodowym Alfabetem Nr 5.
W 1967 pochodna tego alfabetu stałą się oficjalnym
standardem
nazywanym obecnie ASCII.
@Janusz Kosiński, 2005
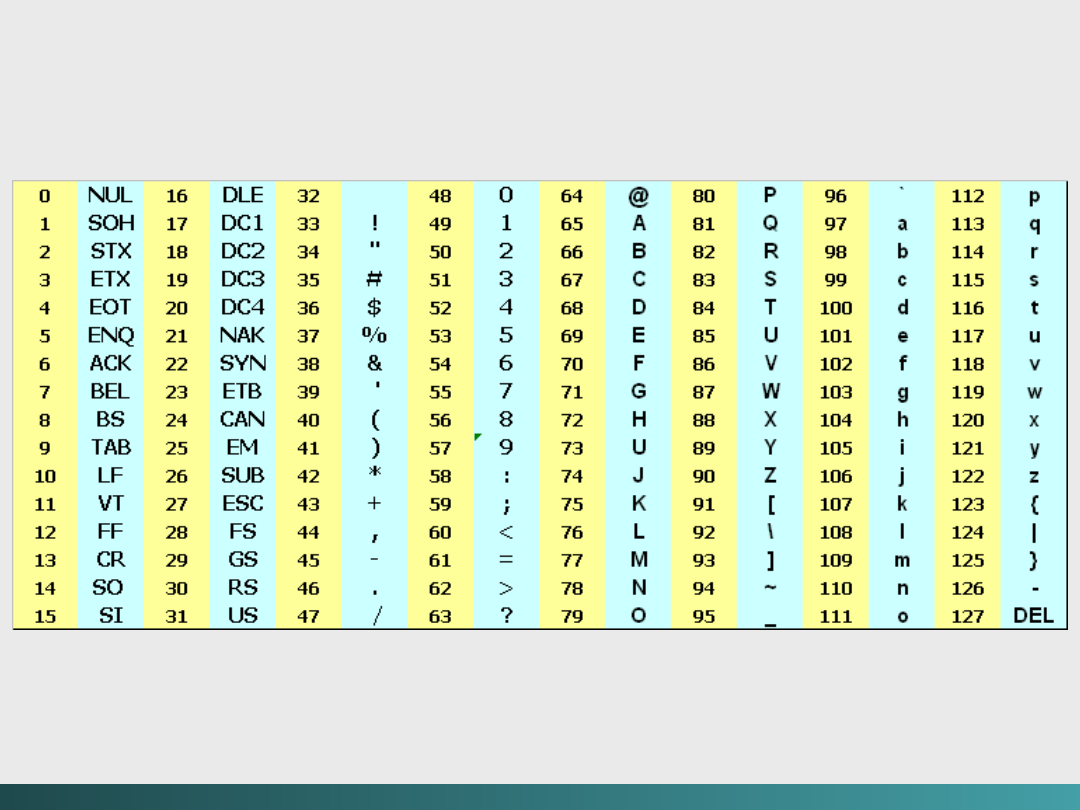
Kody znakowe
Kod ASCII
Stosowane skróty znakowe – opisują czynności wykonywane z treścią
programu

@Janusz Kosiński, 2005
Kody znakowe
Unicode
Oba kody EBCDIC i ASCII były zbudowane na podstawie
alfabetu łacińskiego, Lecz większość ludzi na świecie
stosuje alfabety nie łacińskie, W 1991, utworzone zostało
z liderów przemysłu i polityków konsorcjum, do
określenia międzynarodowego standardu kodowania –
nazywanego
UNICODE
(Unicode Consortium).
Unicode jest 16 bitowym alfabetem, podobnym do ASCII z
zestawem znaków Latin 1.
Jest zbieżny z alfabetem ISO/IEC nr 10646-1, Ponieważ
bazą kodowania Unicode jest 16 bitów, to posiada on
możliwość zakodowania praktycznie wszystkich
stosowanych na świecie alfabetów.
@Janusz Kosiński, 2005
Kody znakowe
Typy znaków
Opis zbioru
znaków
Liczba znaków
Wartości
szesnastkowe
Alfabety
Łaciński, grecki,
cyrylica, itp,
8 192
0000 do 1FFF
Symbole
Matematyczne,
geograficzne,
itp,,
4 096
2000 do 2FFF
CJK
Chińskie,
japońskie i
koreańskie
symbole
fonetyczne i
znaki
przystankowe
4 096
3000 do 3FFF
Han
Ujednolicony
chiński, japoński
i koreański
40 960
4000 do DFF
Rozszerzenie Han
4 096
E000 do EFFF
Definiowane
przez
użytkownika
4 095
F000 do FFFE
Unicode
@Janusz Kosiński, 2005
Kody zapisywania i przesyłania danych
ASCII, EBCDIC, czy Unicode są w jednakowy
sposób reprezentowane w pamięci komputera,
Elementy cyfrowe są raczej w pozycji
„włączony” lub „wyłączony” z niczym
„pomiędzy”.
Jednakże, kiedy dane są zapisywane na pewne
rodzaje nośników (taśma, dysk), czy też przesyłane
na duże odległości, sygnały binarne stają się
zamazane, szczególnie w przypadkach długich
stringów „0” lub „1”.
@Janusz Kosiński, 2005
Kody zapisywania i przesyłania danych
Media magnetyczne,
takie jak taśmy czy dyski
,
mogą gubić synchronizację w wyniku
niestabilności środowiska
(pole magnetyczne w
urządzeniach nadawczych czy odbiorczych jest
wytwarzane przy pomocy prądu elektrycznego),
czy wad materiałowych samych nośników.
@Janusz Kosiński, 2005
Kody zapisywania i przesyłania danych
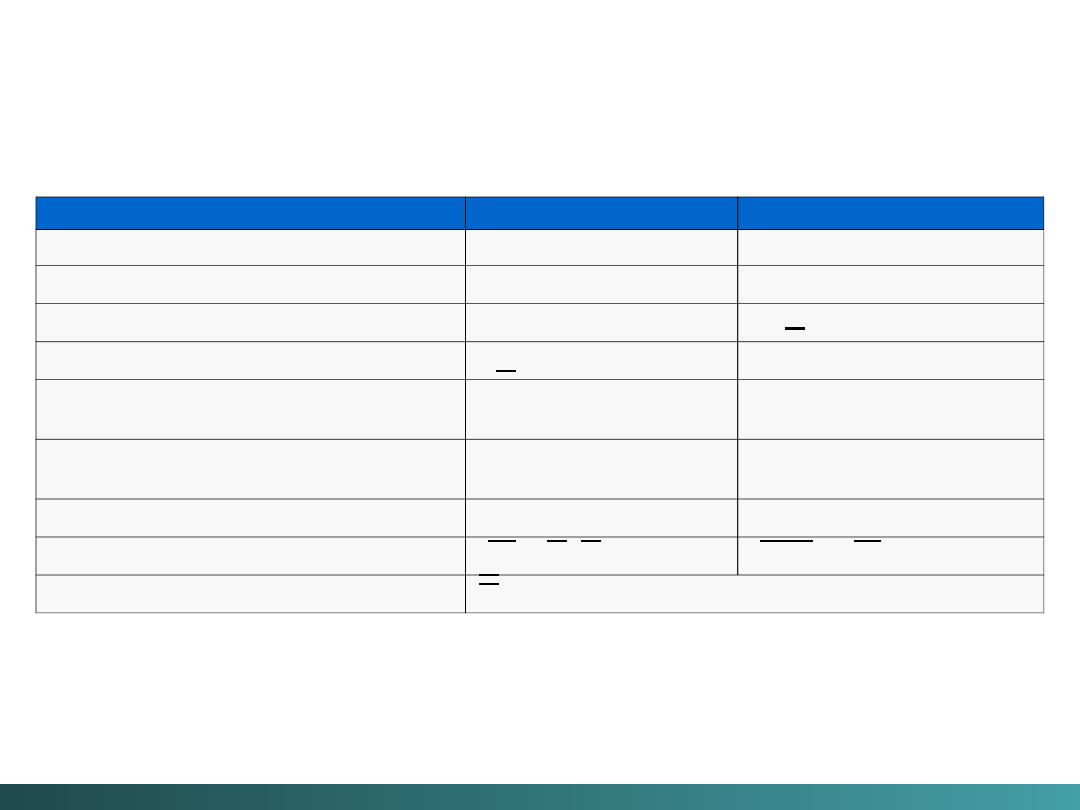
litera
O
K
ASCII
79
75
binarnie
1001111
1001011
Bit parzystości
1
0
Razem
11001111 01001011
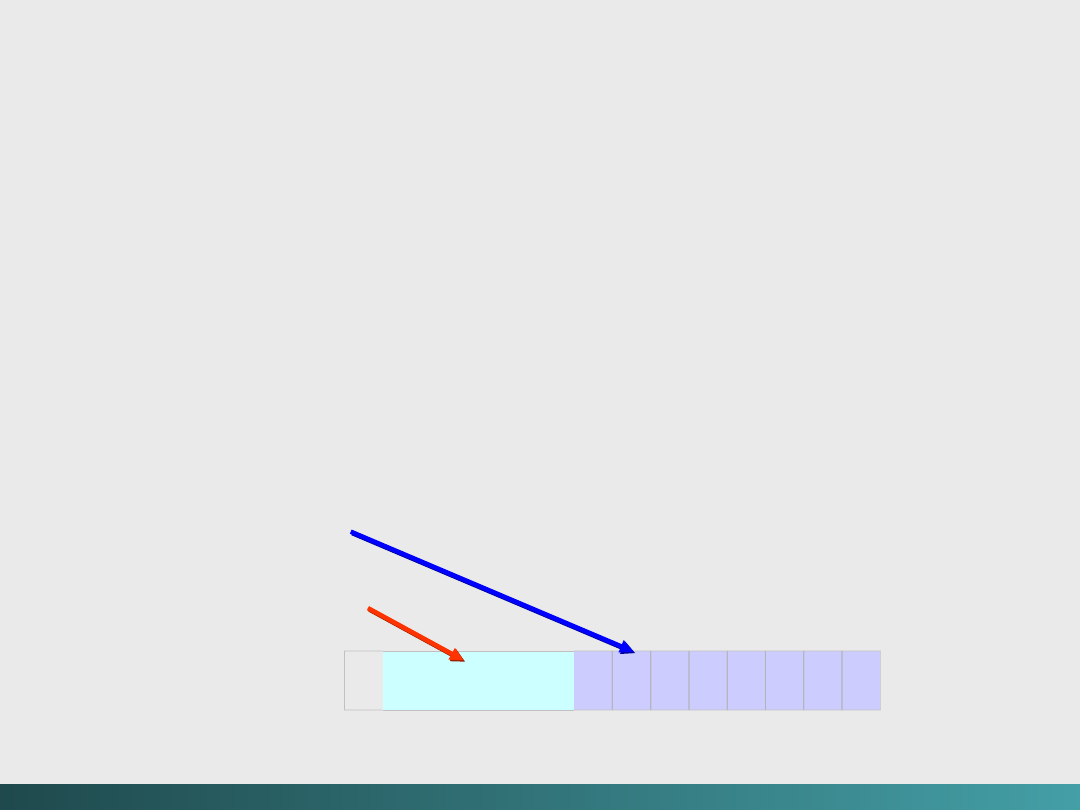
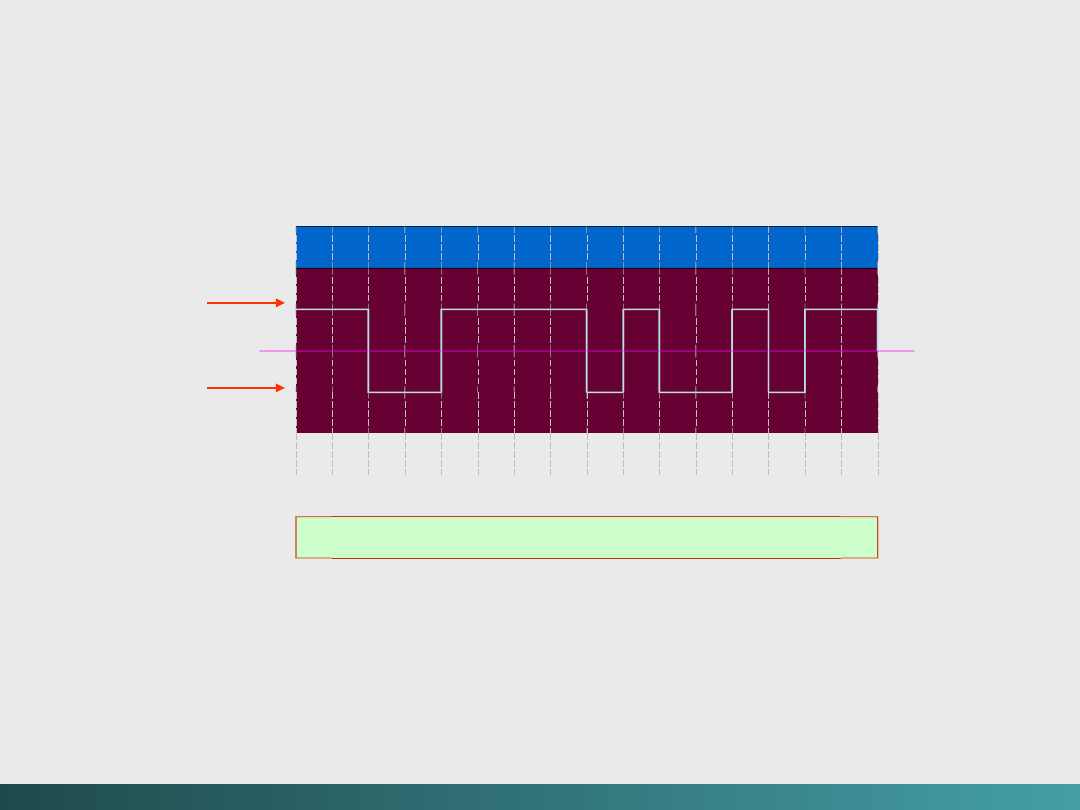
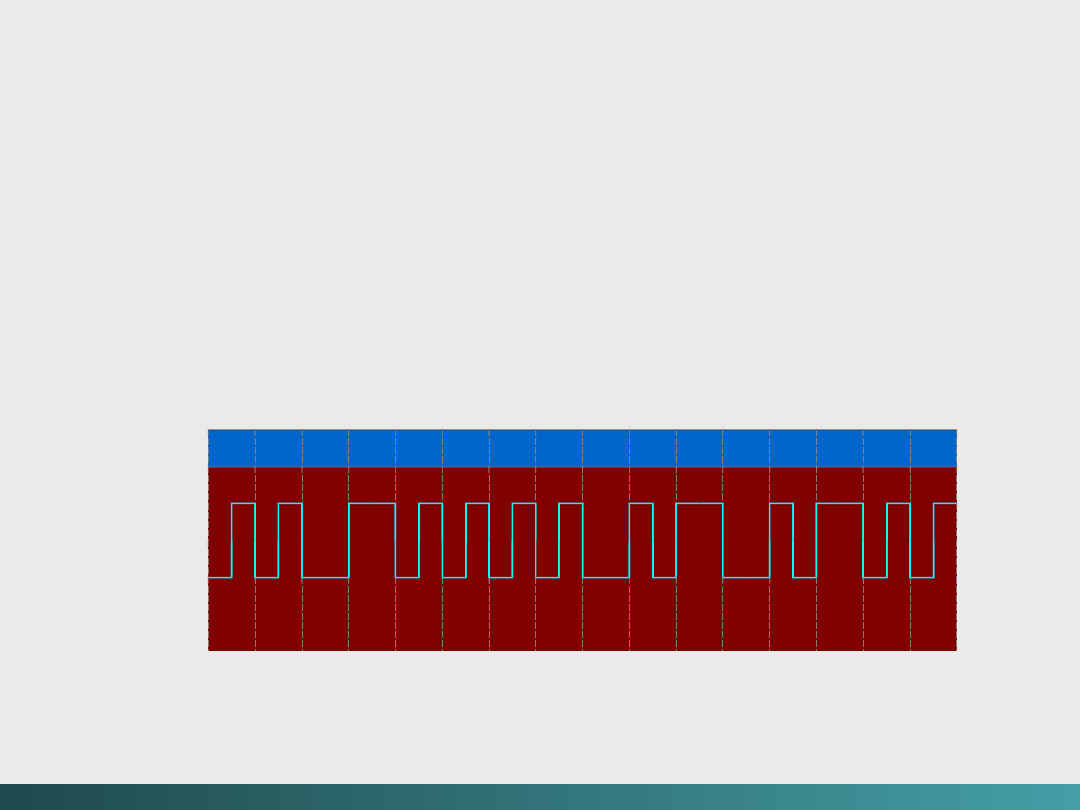
Kod NRZ
(Non-Return-to-Zero)
Najprostszą metodą kodowania danych jest kod
NRZ. Jest on stosowany bezpośrednio – kiedy
mówimy „wysoki” to oznacza to wysoki poziom
napięcia - przeważnie
3 lub 5 V.
zaś kiedy mówimy niski oznacza to niski poziom
napięcia -przeważnie
- 3 lub - 5V.
Na przykład kod ASCII dla angielskiego słowa OK,
z bitem parzystości wynosi:
11001111 01001011
@Janusz Kosiński, 2005
1 1 0 0 1 1 1 1 0 1 0 0 1 0 1 1
Wysok
Wysok
i
i
Niski
Niski
Zero
Zero
b
b
a
a
Kodowanie NRZ dla OK
a
a
.
.
Falowy schemat transmisji
Falowy schemat transmisji
b
b
.
.
Schemat domen magnetycznych
Schemat domen magnetycznych
(
(
kierunek strzałek
kierunek strzałek
wskazuje polaryzację magnetyczną)
wskazuje polaryzację magnetyczną)
Kody zapisywania i przesyłania danych
Kod NRZ
(Non-Return-to-
Zero)
@Janusz Kosiński, 2005
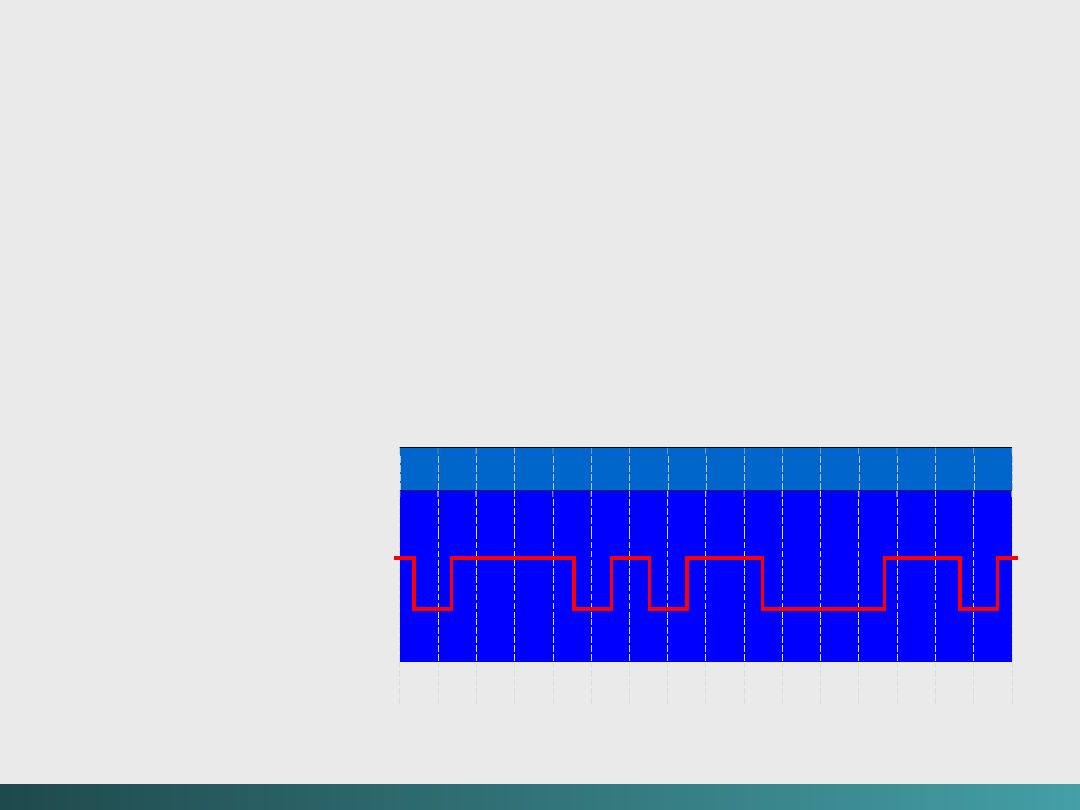
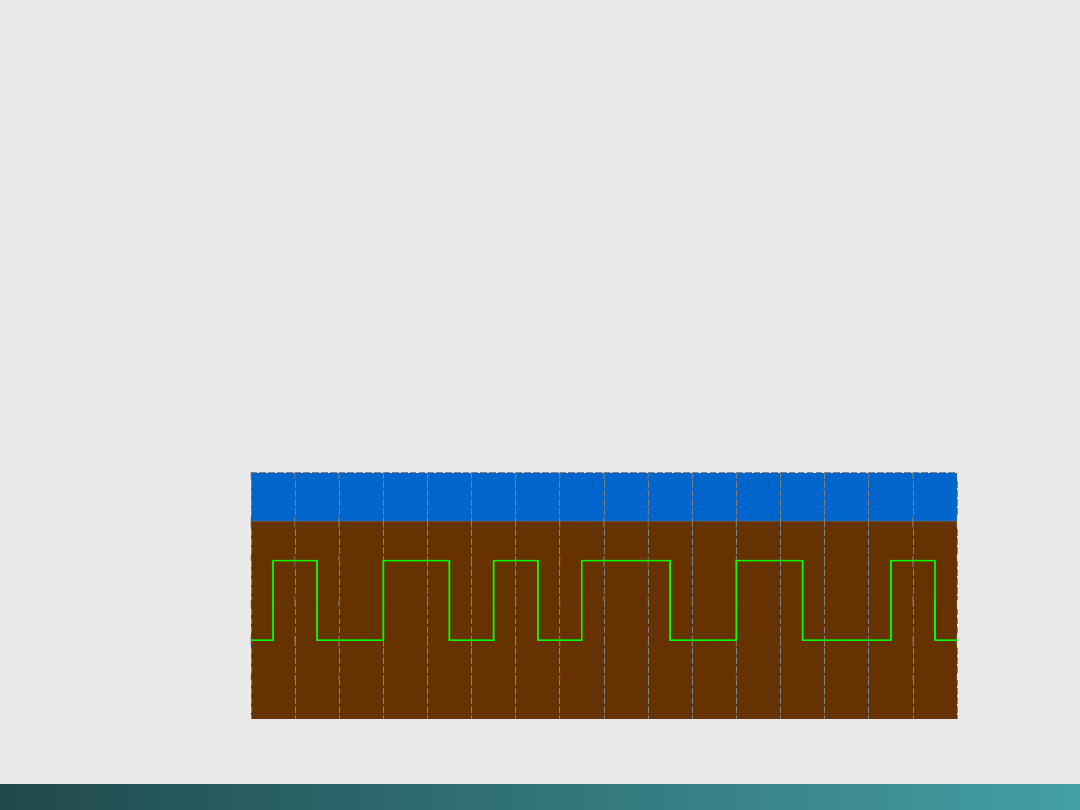
1 1 0 0 1 1 1 1 0 1 0 0 1 0 1 1
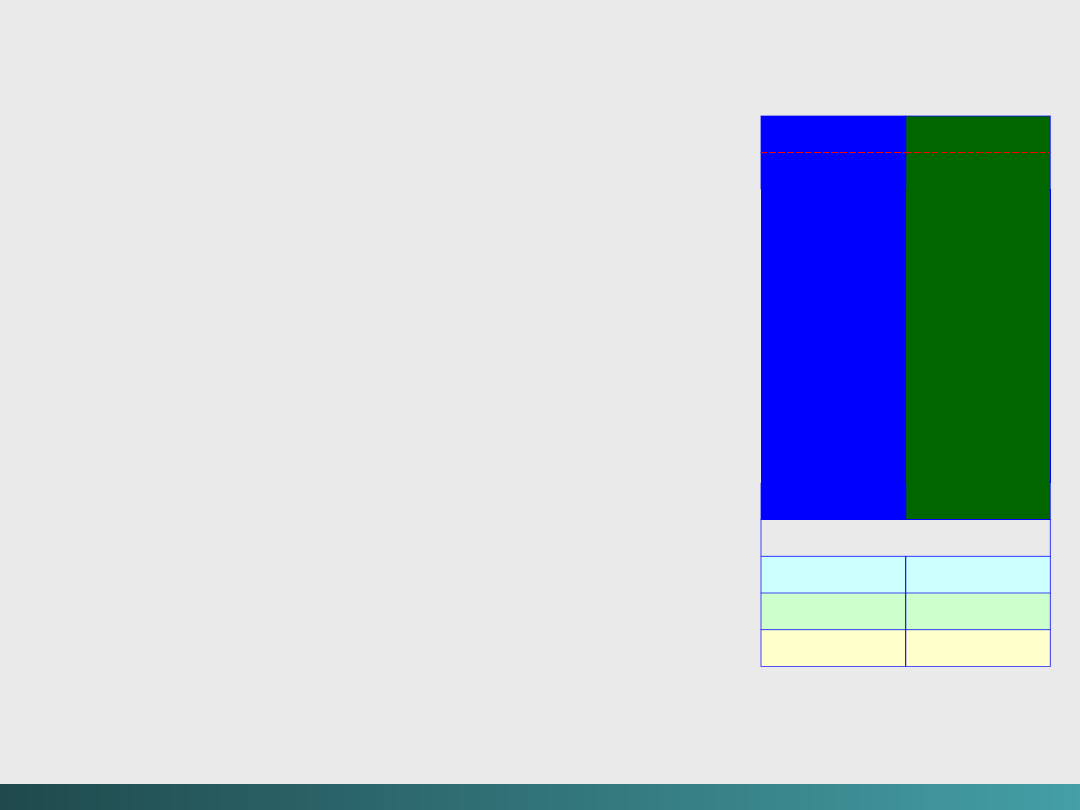
Kody zapisywania i przesyłania danych
Kod NRZI
(Non-Return-to-Zero Invert)
Kodowanie NRZI dla OK
NRZI zapewnia przejścia dla każdej „1” z wysokiego
stanu do niskiego albo z niskiego do
wysokiego, oraz żadnego przejścia dla „0”
To kodowanie rozwiązuje częściowo problem strat
synchronizacji
@Janusz Kosiński, 2005
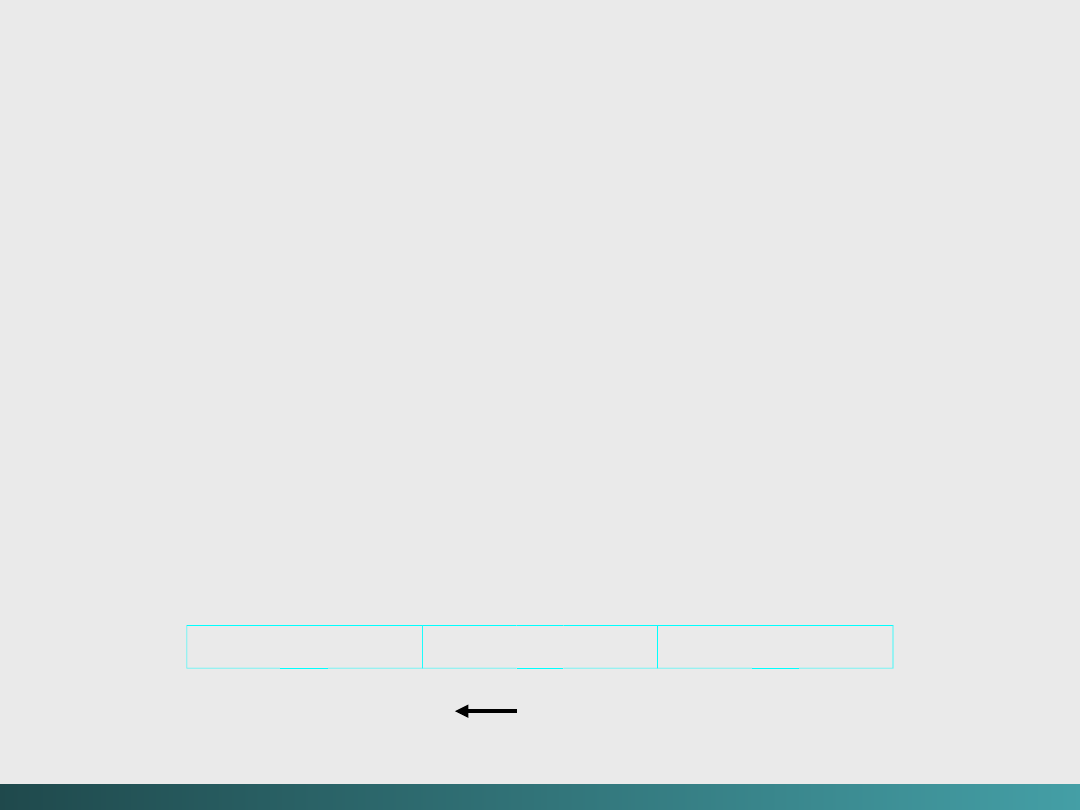
Kody zapisywania i przesyłania danych
Modulacja fazy
(kod Manchester)
Metoda ta zapewnia przejście dla każdego
sygnału, czy to „0” czy też „1”.
W tym kodowaniu,
każde przejście „do góry”
sygnalizuje „1” zaś każde przejście „na dół”
sygnalizuje „0”
– modulacja fazowa jest stosowana m.in. w
sieciach LAN, ale nie jest efektywna dla
przechowywania danych – wymaga dwukrotnej
gęstości w porównaniu z NRZ
@Janusz Kosiński, 2005
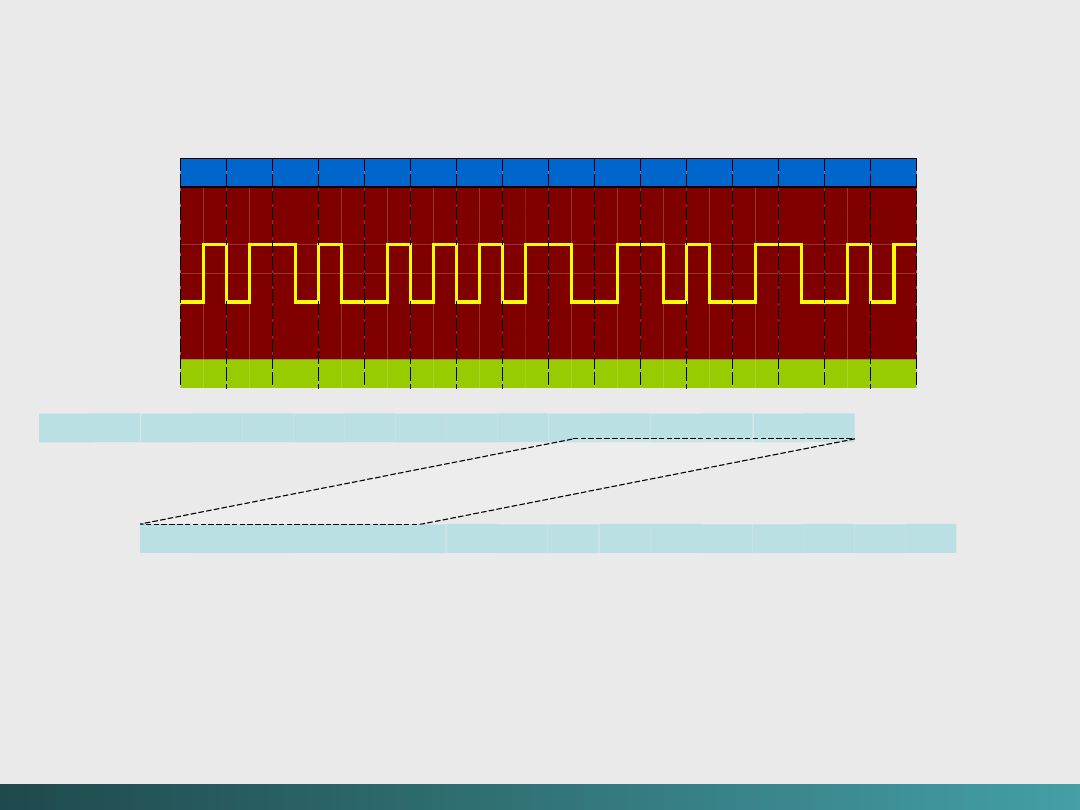
Kody zapisywania i przesyłania danych
Modulacja fazy
(kod Manchester)
1
1
0
0
1
0
1
0
1
1
0
1
0
1
1
1
Kodowanie Manchester dla OK
a
a
.
.
Falowy schemat transmisji
Falowy schemat transmisji
b
b
.
.
Schemat domen magnetycznych
Schemat domen magnetycznych
(
(
kierunek strzałek
kierunek strzałek
wskazuje polaryzację magnetyczną)
wskazuje polaryzację magnetyczną)
b
b
a
a
@Janusz Kosiński, 2005
1 1 0 0 1 1 1 1 0 1 0 0 1 0 1 1
Modulacja częstotliwościowa
Modulacja częstotliwościowa (FM) jest podobna do modulacji
fazowej w tym, że stosowane jest tylko jedno przejście
„wewnętrzne” na każdą „1”, Ta synchronizacja występuje
na początku każdej „komórki bitowej”.
Kody zapisywania i przesyłania danych
Kodowanie FM dla OK
@Janusz Kosiński, 2005
1 1 0 0 1 1 1 1 0 1 0 0 1 0 1 1
Kodowanie MFM
FM jest tylko trochę lepsze niż PM przy uwzględnieniu wymagań
przechowywania. Stąd powstała metoda zmodyfikowana (MFM),
gdzie przejścia miedzy komórkami bitowymi występują tylko przy
następujących po sobie zerach.
MFM jest efektywniejszą metodą kodowania niż FM czy NRZ,
szczególnie przy kontroli błędów –przez wiele lat była stosowana
dla przechowywania danych na dysku.
Kodowanie MFM dla OK
Kody zapisywania i przesyłania danych
@Janusz Kosiński, 2005
Kody zapisywania i przesyłania danych
Kod RLL
Kod RLL (Run-length-limited)
jest metodą kodowania w
której blok znaków kodu ASCII lub EBCDIC jest tłumaczony
w sposób powodujący ograniczanie liczby następujących
po sobie zer.
Kod RLL(d, k) pozwala na występowanie
minimum d
i
maksimum k
występujących po sobie zer, pomiędzy
dowolną parą następujących po sobie jedynek.
Kodowanie słów z wykorzystaniem RLL zapobiega utracie
synchronizacji danych na dysku, co wydarzało się przy
stosowaniu kodu „płaskiego” (NRZI).
@Janusz Kosiński, 2005
Kody zapisywania i przesyłania danych
Najbardziej rozpowszechnionym wariantem
jest kod RLL(2,
7) stosowany w dyskach magnetycznych. Od strony
technicznej jest 16 bitowym odwzorowaniem kodu ASCII lub
EBCDIC – jest około 50% efektywniejszy niż kod MFM.
Teoretycznie rzecz ujmując,
RLL jest formą kompresji
danych
zwaną kodem Hufmana.
Teoria jest oparta na założeniu, że wystąpienie „1” w
dowolnej komórce bitowej jest tak samo prawdopodobne.
Na podstawie tego założenia możemy wnioskować, że
prawdopodobieństwo wystąpienia układu „10” lub „11”, w dowolnej
parze rozpatrywanych komórek bitowych, jest równe 0,25.
@Janusz Kosiński, 2005
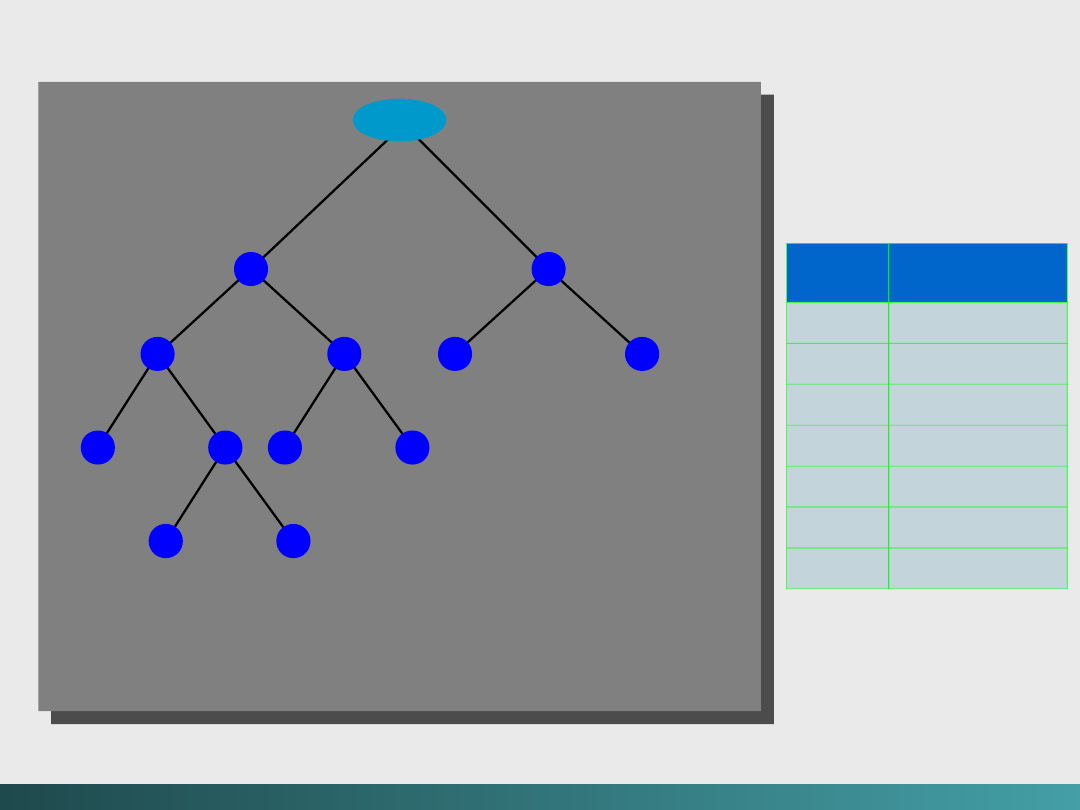
Drzewo prawdopodobieństwa dla RLL(2, 7)
Kodowanie
Kodowanie RLL(2,
7)
Kody zapisywania i przesyłania danych
korzeń
korzeń
P(000) =
P(000) =
1/8
1/8
P(010) =
P(010) =
1/8
1/8
P(011) =
P(011) =
1/8
1/8
P(0010) =
P(0010) =
1/16
1/16
P(0011) =
P(0011) =
1/16
1/16
P(11) =
P(11) =
1/4
1/4
0
0
0
0
0
0
1
1
0
0
0
0
1
1
1
1
1
1
P(10) =
P(10) =
1/4
1/4
0
0
1
1
1
1
Wzór
Wzór
bitów
bitów
Kod RLL(2, 7)
Kod RLL(2, 7)
10
0100
11
1000
000
000100
010
100100
011
001000
0010
00100100
0011
00001000
@Janusz Kosiński, 2005
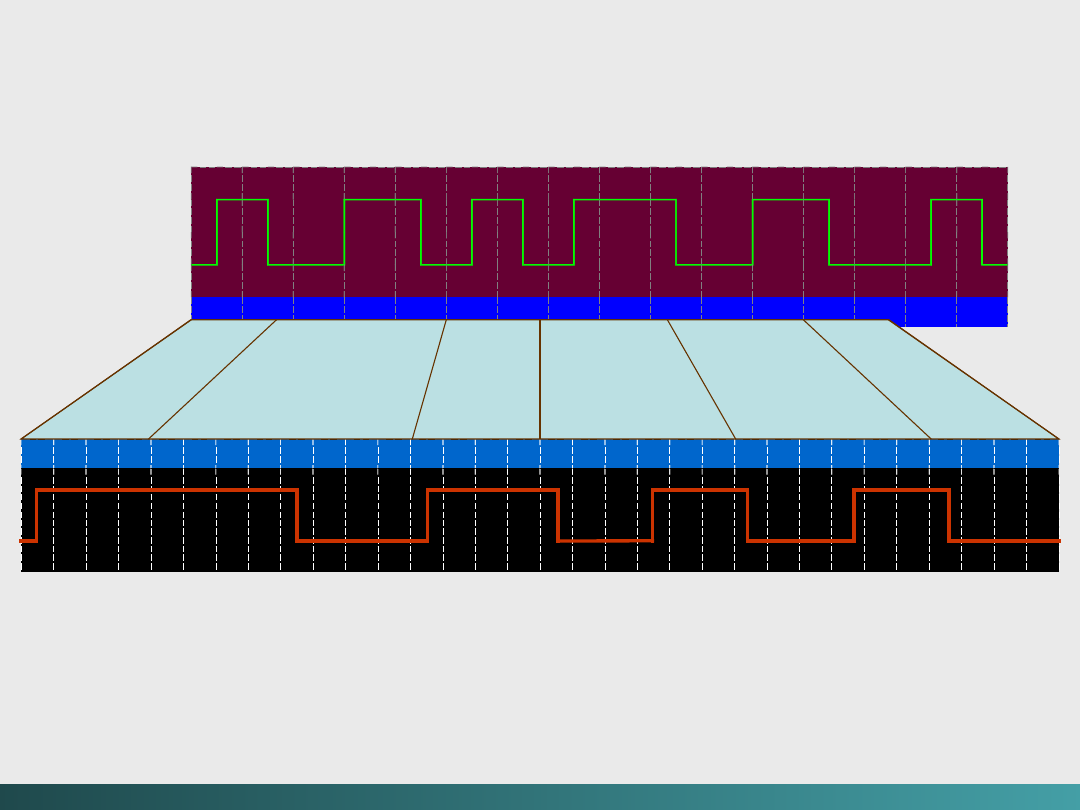
1
1
0
0
1
1
1
1
0
1
0
0
1
0
1
1
1 0 0 0 0 0 0 0 1 0 0 0 1 0 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 0
MFM → 12
przejść
RLL(2, 7)
→
8
przejść
Porównanie kodowania MFM oraz RLL(2, 7) dla słowa OK
@Janusz Kosiński, 2005
Wykrywanie błędów i korekcja
Niezależnie od stosowanych metod kodowania,
żaden kanał komunikacyjny i środek
magazynowania nie będzie całkowicie wolny od
błędów. Przy zwiększaniu współczynnika
transmisji (bity na sekundę) odstępy między
bitami są coraz ciaśniejsze.
Podobnie przy magazynowaniu – wzrost liczby bitów na milimetr
kwadratowy powoduje zwiększenie gęstości strumienia,
Wskaźnik błędów wzrasta w bezpośredniej proporcji do liczby
transmitowanych bitów na sekundę czy też liczby bitów na
milimetr kwadratowy.
@Janusz Kosiński, 2005
Wykrywanie błędów i korekcja
Cykliczna kontrola redundancji (Cyclic
Redundancy Check)
Sumy kontrolne są szeroko stosowane w różnych
systemach kodowania
(od kodów paskowych do ISBN -
International Standard Book Numbers) –
pozwalają na szybkie
stwierdzenie, że poprzedzająca cyfra jest błędna,
Cykliczna kontrola redundancji jest typem sumy
kontrolnej stosowanej przede wszystkim w przesyłaniu
danych, celem stwierdzenia czy wewnątrz strumienia
bajtów lub bloku danych nie ma błędów.
Sumy kontrolne i CRC są typem systematycznej detekcji
błędów
Słowo cykliczna w CRC odnosi się do teorii
matematycznej, znajdującej się za tym schematem
obliczeniowym.
@Janusz Kosiński, 2005
Reguły dodawania są
następujące:
0 + 0 = 0
0 + 1 = 1
1 + 0 = 1
1 + 1 = 0
przykład :
Znaleźć sumę 1011
2
i 110
2
modulo 2
1011
+110
1101
2
(mod 2)
Ta suma ma sens jedynie w
modulo 2
Wykrywanie błędów i korekcja
Arytmetyka Modulo 2
Arytmetyka 12 godzinnego zegara jest systemem modulo 12 – po
dodaniu dwóch godzin do 11:00 otrzymujemy 1:00.
Arytmetyka modulo 2 używa dwóch binarnych operandów bez
przesuwania i pożyczania. Wynik jest binarny i również wchodzi
w skład systemu modulo 2.
Z powodu zastosowania takiego domknięcia w dodawaniu, matematycy
mówią, że system modulo 2 tworzy pole algebraiczne
@Janusz Kosiński, 2005
101
2
nie dzieli się przez
1011
2
czyli jest to
reszta,
Iloraz wynosi:
1010
2
Arytmetyka modulo 2
Dzielenie modulo 2 operuje na serii dodawań modulo
2
Przykład:
Znaleźć iloraz i resztę z dzielenia 1001011
2
przez
1011
2
1 0 1 0
1 0 1 1
| 1 0 0 1 0 1 1
1 0 1 1
0 0 1 0
0 0 1 0 0 1
1 0 1 1
0 0 1 0
0 0
1 0 1
Wykrywanie błędów i korekcja
@Janusz Kosiński, 2005
Wykrywanie błędów i korekcja
Wykrywanie błędów i korekcja
Obliczanie i stosowanie CRC
Przykład:
Niech bajt informacji wynosi
I = 1001011
2
, (dowolna liczba
bajtów może być wykorzystana do utworzenia bloku
informacji).
Nadawca i odbiorca zgadzają się na zastosowanie
arbitralnego wzorca binarnego:
P = 1011
2
, (wzorce
zaczynające i kończące się z „1” „pracują” lepiej).
Przesuwamy I w lewo o jedno miejsce mniej niż liczba bitów
w P tak, że nowa informacja ma postać:
I = 1001011000
2
Używając I jako dzielnej i P jako dzielnika, przeprowadzamy
dzielenie modulo 2
, ignorujemy wartość ilorazu i
zapisujemy resztę
100
2
, reszta ta jest aktualną sumą
kontrolną CRC.
@Janusz Kosiński, 2005
Wykrywanie błędów i korekcja
Wykrywanie błędów i korekcja
1 0 1 0 1 0 0
1 0 1 1
|
1 0 0 1 0 1 1
1 0 0
1 0 1 1
0 0 1 0 0 1
1 0 1 1
0 0 1 0
0 0 1 0 1 1
1 0 1 1
0 0 0 0
Obliczanie i stosowanie
CRC
Przykład (c.d.)
Dodając resztę do I,
uzyskujemy wiadomość M:
1001011000
2
+ 100
2
=
1001011100
2
M jest odkodowane i
sprawdzane
przez odbiorcę wiadomości
przy
zastosowaniu procesu
odwrotnego.
Tym razem P dzieli M
dokładnie:
@Janusz Kosiński, 2005
Reszta różna od zera wskazuje, że w czasie transmisji M powstał
błąd. Metoda ta jest wydajniejsza przy zastosowaniu wielomianów
wysokiego stopnia, Są cztery podstawowe standardy wielomianów
o szerokim zastosowaniu:
CRC-CCITT (ITU-T):
X
16
+ X
12
+ X
5
+ 1
CRC-12:
X
12
+ X
11
+ X
3
+ X
2
+ X + 1
CRC-16 (ANSI):
X
16
+ X
15
+ X
2
+ 1
CRC-32:
X
32
+ X
26
+ X
23
+ X
22
+ X
16
+ X
12
+ X
11
+ X
10
+ X
8
+ X
7
+ X
5
+ X
4
+ X +1
CRC-CCITT
,
CRC-12
, i
CRC-16
operują na parach bajtów;
CRC-32
używa czterech bajtów, co jest właściwe dla systemów
operujących 32 bitowymi słowami. Zostało dowiedzione, że CRC
wykorzystujące te wielomiany mogą wykryć ponad 99,8%
pojedynczych błędnych bitów,
Wykrywanie błędów i korekcja
Wykrywanie błędów i korekcja
@Janusz Kosiński, 2005
Wykrywanie błędów i korekcja
Kod Hamminga
Kanały wymiany danych są bardziej podatne na błędy i bardziej
tolerancyjne niż systemy dyskowe. Wystarczy posiadanie
zdolności do wykrywania błędów. Jeżeli urządzenie
komunikacyjne stwierdzi wystąpienie błędnego bitu, to jedyne
co robi to zamawia ponowna transmisję.
Systemy pamięciowe
i
systemy magazynowania
nie
posiadają tych możliwości.
Dysk może być wyłącznym repozytorium (przechowalnią) lub
raczej kolekcją nierepredukowalnych danych czasu
rzeczywistego. Stąd dyski i magazyny danych muszą mieć
zdolność do wykrywania i korygowania błędów.
@Janusz Kosiński, 2005
Wykrywanie błędów i korekcja
Kod Hamminga
Kodowanie z wykrywaniem błędów jest problemem
od ponad stu lat, i mimo to jednym z najbardziej
efektywnych i najstarszych kodów jest
kod
Hamminga - adaptacja koncepcji parzystości –
zdolność do korekcji wzrasta wraz z liczbą
dodawanych do słowa bitów parzystości.
Kody Hamminga są stosowane w sytuacjach, gdy mogą
pojawiać się błędy przypadkowe.
W tej sytuacji zakładamy, że każdy błędny bit posiada swoje
prawdopodobieństwo pojawienia się, niezależnie od innych
błędów.
Słowo w pamięci zawiera
m bitów,
ale
r nadmiarowych
bitów
jest dodawanych w celu umożliwienia detekcji i
korekcji błędów.
Stąd słowo końcowe (słowo zakodowane) jest N bitową
jednostką, zawierająca
m bitów danych
i
r bitów
kontrolnych:
Liczba pozycji bitów, którymi różnią się dwa słowa
kodowane nazywa się
odległością Hamminga.
Np,, jeżeli
mamy dwa słowa zakodowane:
Możemy zobaczyć, że różnią się 3 pozycjami bitów, stąd
odległość Hamminga dla tych słów wynosi 3.
@Janusz Kosiński, 2005
Wykrywanie błędów i korekcja
m
m
bitów
bitów
r
r
bitów
bitów
10001001
10001001
10110001
10110001
* * *
* * *

@Janusz Kosiński, 2005
Wykrywanie błędów i korekcja
Odległość Hamminga jest ważna w kontekście wykrywania
błędów.
Jeżeli dwa zakodowane słowa są oddalone od
siebie o odległość Hamminga równą d, to wymagane jest
wystąpienie d pojedynczych bitów (błędów) aby
przekonwertować jedno słowo na drugie – taki typ błędu nie
powinien być wykryty.
Stąd wynika, jeżeli chcemy mieć gwarancję detekcji
wszystkich pojedynczych błędnych bitów, wszystkie pary
słów (porównywanych) muszą mieć odległość Hamminga
najwyżej równą 2.
Jeżeli n bitowe słowo kodowe nie jest rozpoznawane jako legalne
słowo danego kodu, to jest sygnalizowany błąd.

@Janusz Kosiński, 2005
Wykrywanie błędów i korekcja
Stosując algorytm do obliczania bitów
kontrolnych, można zestawić kompletną listę
legalnych słów kodowanych.
Najmniejsza odległość Hamminga znaleziona między
wszystkimi parami słów tego kodu jest nazywana
minimalną odległością Hamminga tego kodu
D(min).
Określa ona możliwości wykrywania błędów i
wprowadzania korekt w tym kodzie.
@Janusz Kosiński, 2005
Wykrywanie błędów i korekcja
Załóżmy pamięć z dwoma bitami danych i jednym bitem
parzystości (na końcu słowa).
Z dwoma bitami danych mamy
ogółem 4 możliwe słowa:
Dane
Parzystość Kod
Słowo
Bit
Słowo
00
0
000
01
1
011
10
1
101
11
0
110
@Janusz Kosiński, 2005
Wykrywanie błędów i korekcja
Wynikowe słowo kodowe ma 3 bity, Stosując 3 bity dla 8
możliwości mamy: (poprawne słowa kodowe są oznakowane *):
000 *
100
001
101 *
010
110 *
011 *
111
Jeżeli zostanie wykryte słowo kodowe 001 to zostanie
zasygnalizowany błąd. Przypuśćmy, że prawidłowe słowo jest 011,
błąd spowoduje powstanie słowa 001, taki błąd zostanie wykryty
ale nie będzie skorygowany. Jest niemożliwe stwierdzenie jak wiele
bitów może być magazynowanych i ile może zawierać błędy.
Kody
korygujące błędy wymagają więcej niż jednego bitu parzystości.
Algebra Boole’a i logika cyfrowa
Algebra Boole’a i logika cyfrowa
3

Algebra Boole’a i logika cyfrowa
George Boole żył w Anglii (1815 – 1864), Boole był
matematykiem i logikiem pracującym nad wyrażaniem
rozważań logicznych przy pomocy symboli
matematycznych – stworzył gałąź matematyki nazywaną
logiką symboliczną lub algebrą Boole’a.
Algebra ta została wykorzystana przez Johna Vincenta
Atanasoffa, który postanowił zbudować maszynę podobną
zasadą działania do maszyn Pascala i Babbage’a – chcąc ją
zastosować do rozwiązywania liniowych równań
algebraicznych.
@Janusz Kosiński, 2005
W odniesieniu do obiektów binarnych, algebra Boole’a posiada
operacje, które mogą być wykonywane na tych obiektach.
Kombinacja tych operacji i zmiennych, daje w wyniku
wyrażenia Boolowskie. Funkcja Boolowska posiada jedną lub
więcej wartości wejściowych i w wyniku daje wyrażenie
bazujące na tych wielkościach, z zakresu {0, 1}.
Trzema wspólnymi operatorami
Boolowskimi są:
AND, OR, i
NOT.
Dla lepszego zrozumienia tych operatorów potrzebny
jest mechanizm, pozwalający na sprawdzenie ich zachowania.
Każdy operator może być opisany przy pomocy tablicy,
wyszczególniającej wejścia z wszystkimi możliwymi
wartościami oraz wartości wyjściowe, reprezentujące
wszystkie możliwe kombinacje tych wejść. Tablica taka jest
nazywana
tablicą prawdy.
@Janusz Kosiński, 2005
Algebra Boole’a i logika cyfrowa
@Janusz Kosiński, 2005
Tablica prawdy dla
AND
Wejścia
Wyjście
x
y
xy
0
0
0
0
1
0
1
0
0
1
1
1
Wejścia
Wyjście
x
y
x + y
0
0
0
0
1
1
1
0
1
1
1
1
Tablica prawdy dla OR
Tablica prawdy dla
NOT
Wejście
Wyjście
x
0
1
1
0
x
Algebra Boole’a i logika cyfrowa
@Janusz Kosiński, 2005
Tożsamości Boole’owskie
Najczęściej wyrażenia Boole’owskie nie występują w
prostej formie.
Wystarczy przypomnienie z algebry, wyrażenie 2x +
6x nie jest przedstawione w prostej formie; może być
uproszczone do postaci: 8x.
Wyrażenia Boole’owskie również mogą być
upraszczane, ale potrzebne są nowe prawa
wykorzystywane w tej algebrze.
Algebra Boole’a i logika cyfrowa
@Janusz Kosiński, 2005
Podstawowe związki algebry
Boolowskiej
Nazwa
Forma AND
Forma OR
Prawo Tożsamości
1 x = x
0 + x = x
Prawo Dominacji
0 x = x
1 + x = x
Prawo Idempotencji
x x = x
x + x = 1
Prawo Komutatywności
x x = 0
x + y = y + x
Prawo Łączności
(xy)z = x(yz)
(x + y) + z = x + (y +
z)
Prawo Rozdzielności
x + yz = (x + y)(x +
z)
x + (y + z) = xy + yz
Prawo Absorpcji
x(x + y) = x
x + xy = x
Prawo DeMorgana
(xy) = x + y
(x + y) = (xy)
Prawo podwójnego zaprzeczenia
x = x
Algebra Boole’a i logika cyfrowa
@Janusz Kosiński, 2005
Tablica prawdy dla formy
AND
w prawach DeMorgana
x
y
(xy)
( )
+
0
0
0
1
1
1
1
0
1
0
1
1
0
1
1
0
0
1
0
1
1
1
1
1
0
0
0
0
xy
x
y
x
x
Algebra Boole’a i logika cyfrowa
@Janusz Kosiński, 2005
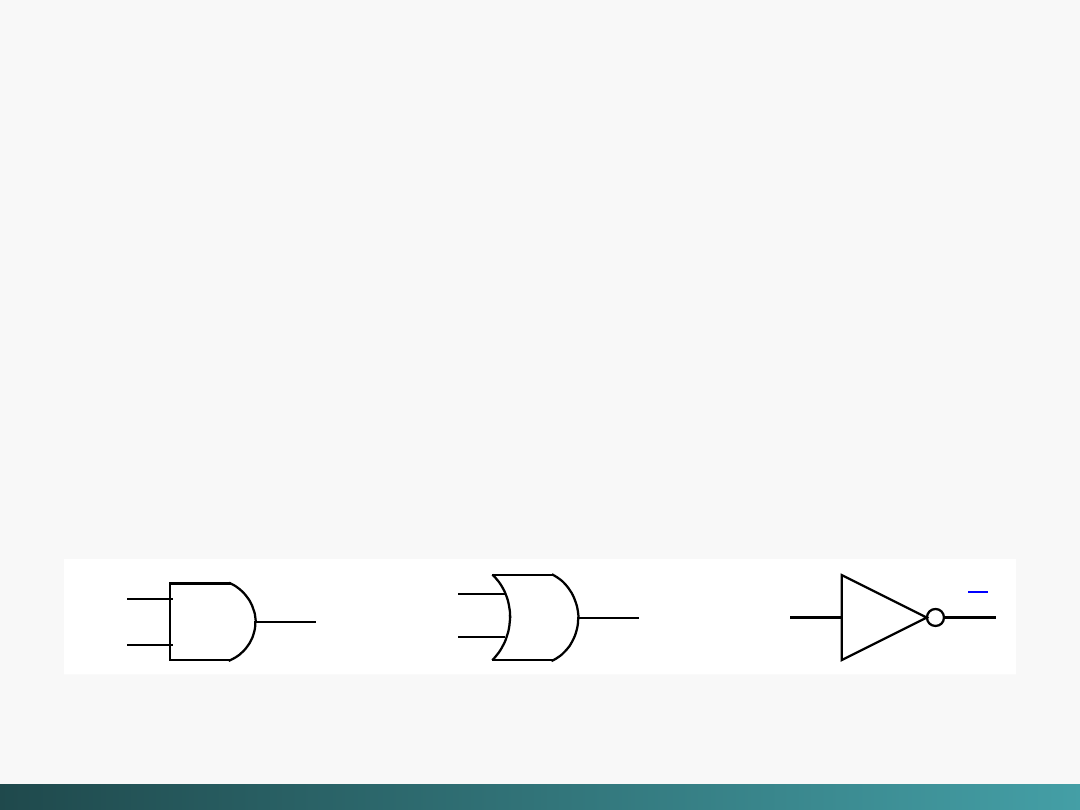
bramka
OR
bramka
NOT
X
y
x + y
X
x
xy
X
y
bramka
AND
Algebra Boole’a i logika cyfrowa
Bramki logiczne
Operatory logiczne
AND
,
OR,
i
NOT
są reprezentowane w
sensie abstrakcyjnym przy pomocy
tablic prawdy.
Fizyczne
składniki (zwane obwodami scalonymi), pozwalające na
realizację zadań komputera są wykonane z wielkiej liczby
podstawowych elementów zwanych bramkami.
Bramki implementują podstawowe funkcje logiczne jakie realizuje
komputer – urządzenia realizujące dwuwartościowe funkcje (dzięki
dwuwartościowym sygnałom) – implementują podstawowe funkcje
Boolowskie.
Trzy podstawowe bramki
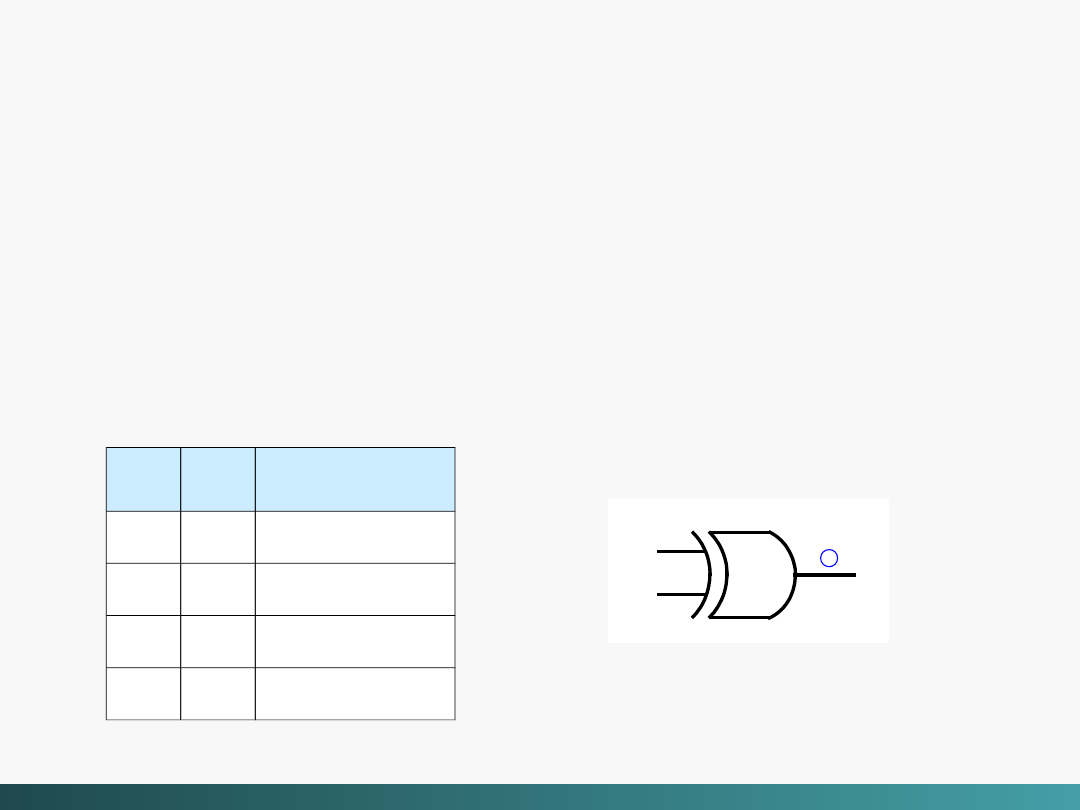
Bramki logiczne
Innym typem wspólnej bramki jest
exclusive-OR
(XOR),
reprezentowana wyrażeniem Boolowskim: x
y,
XOR
daje FAŁSZ jeżeli oba wejścia są równe i
PRAWDĘ w przeciwnym przypadku
@Janusz Kosiński, 2005
Tablica prawdy dla XOR,
oraz symbol logiczny
XOR
X
y
x
+
y
bramka XOR
x
y
x XOR y
0
0
0
0
1
1
1
0
1
1
1
0
Algebra Boole’a i logika cyfrowa
@Janusz Kosiński, 2005
Algebra Boole’a i logika cyfrowa
x
y
x NAND y
0
0
1
0
1
1
1
0
1
1
1
0
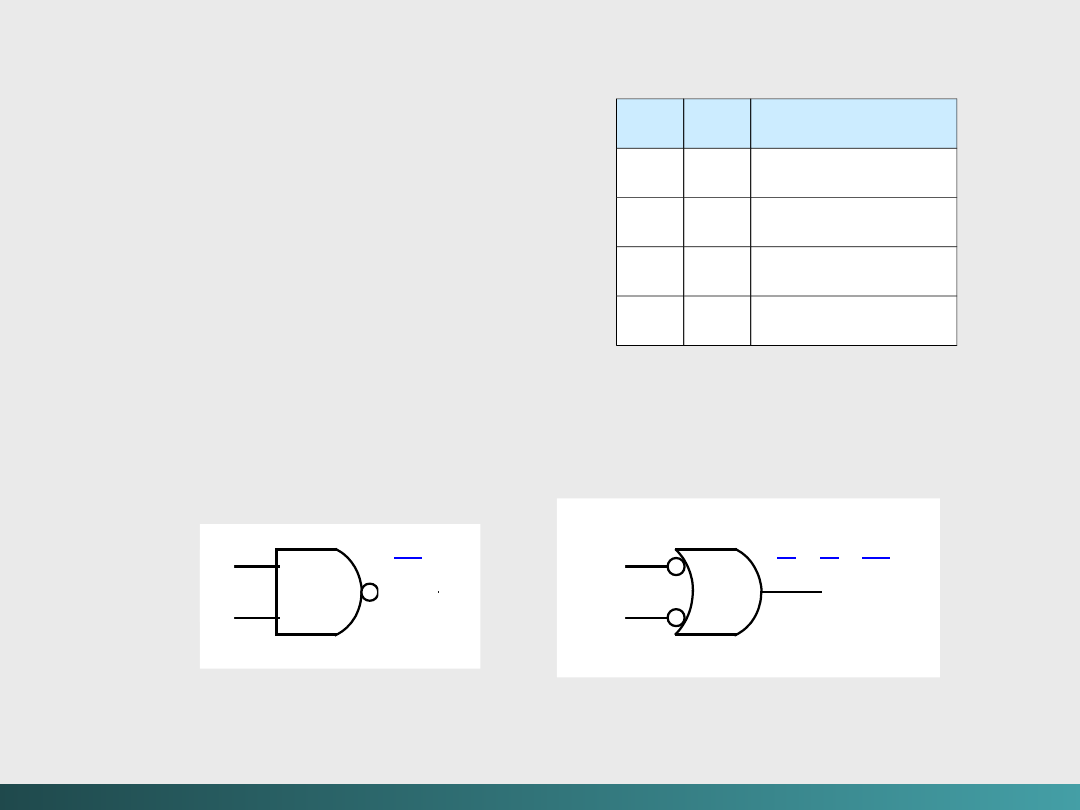
Bramki logiczne
Inną wspólną bramką jest
NAND,
dająca
komplementarne wyjście dla
AND
.
Bramka logiczna ma dwa
różne symbole,
reprezentujące jej działanie –
por. prawa DeMorgana.
Tablica prawdy dla
NAND,
oraz jej symbole
logiczne
(x + y = xy
)
(xy
)
x
y
x
y
@Janusz Kosiński, 2005
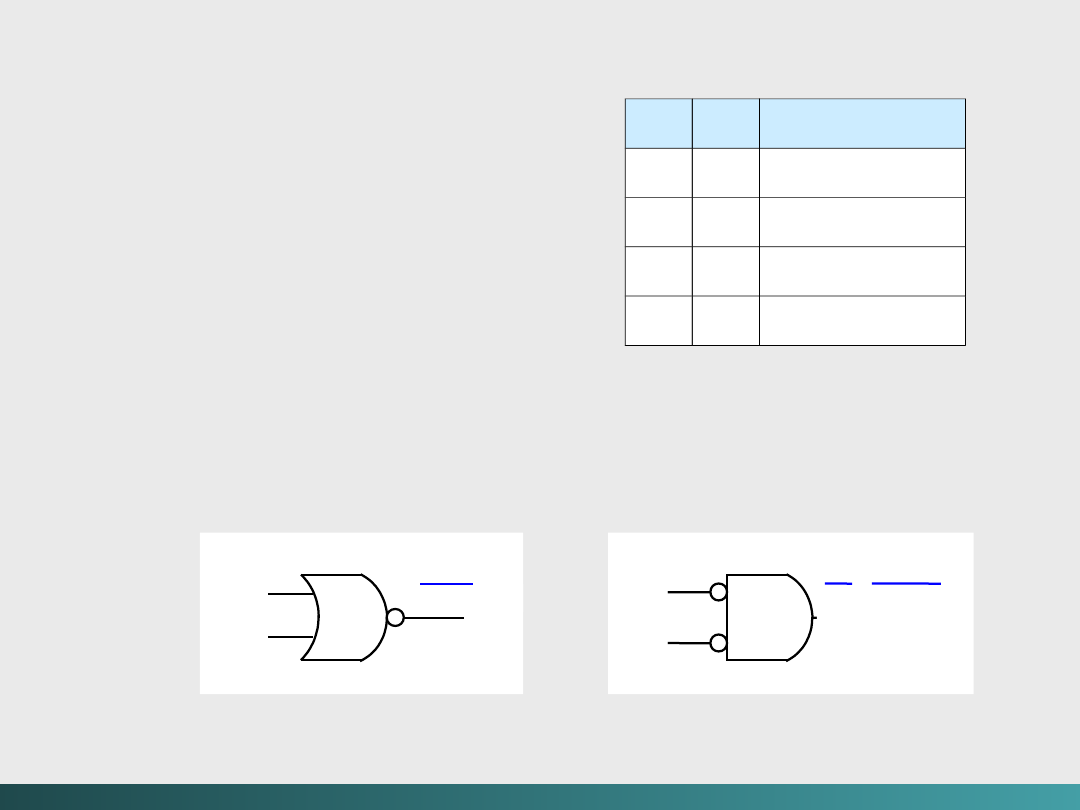
Algebra Boole’a i logika cyfrowa
Bramki logiczne
Inną bramką jest bramka
NOR
, dająca
komplementarne wyjścia dla
OR.
Bramka logiczna ma dwa
różne symbole,
reprezentujące jej działanie –
por. prawa DeMorgana.
Tablica prawdy dla NOR,
oraz jej symbole
logiczne
x
y
x NOR y
0
0
1
0
1
0
1
0
0
1
1
0
(x + y)
x
y
x
y
xy =(x +
y)
@Janusz Kosiński, 2005
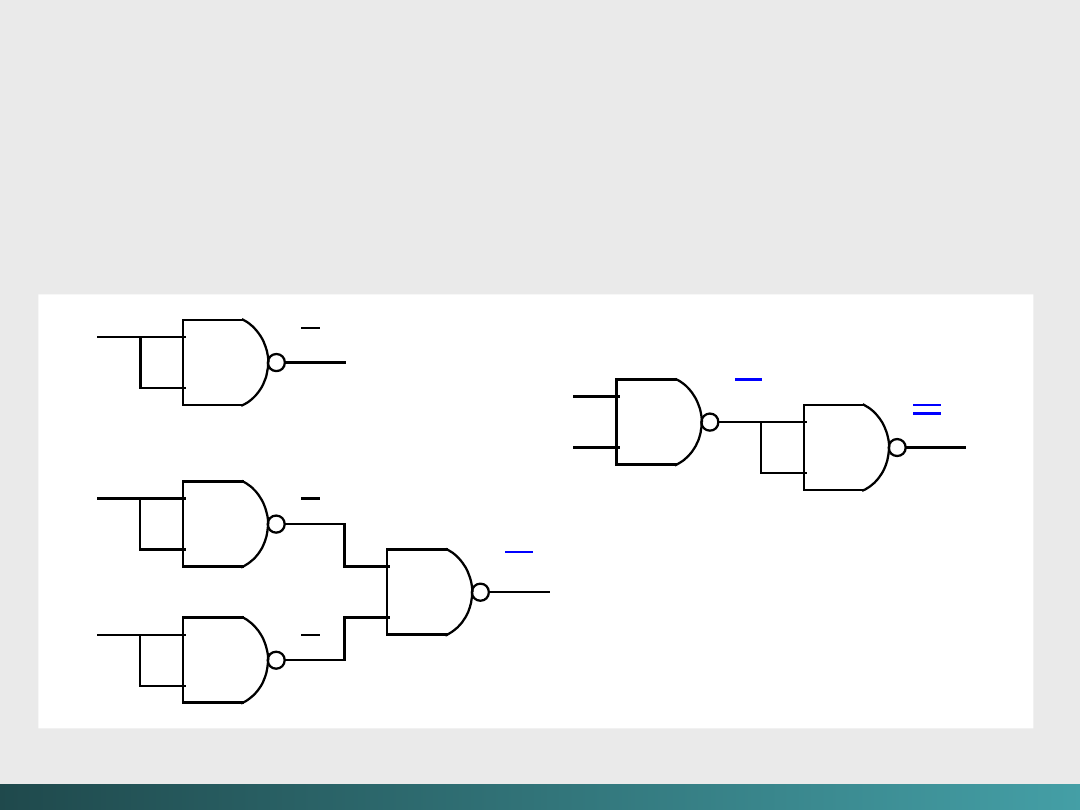
Dlaczego nie stosuje się bramek AND, OR i NOT oddzielnie? –
wytworzenie obwodów z bramkami
NAND
jest łatwiejsze i tańsze!
Konstrukcja trzech
obwodów używających tylko
bramki NAND
Algebra Boole’a i logika cyfrowa
(xy
)
x
y
(xy ) =
xy
x
x
(xy ) = x +
y
x
y
x
y
@Janusz Kosiński, 2005
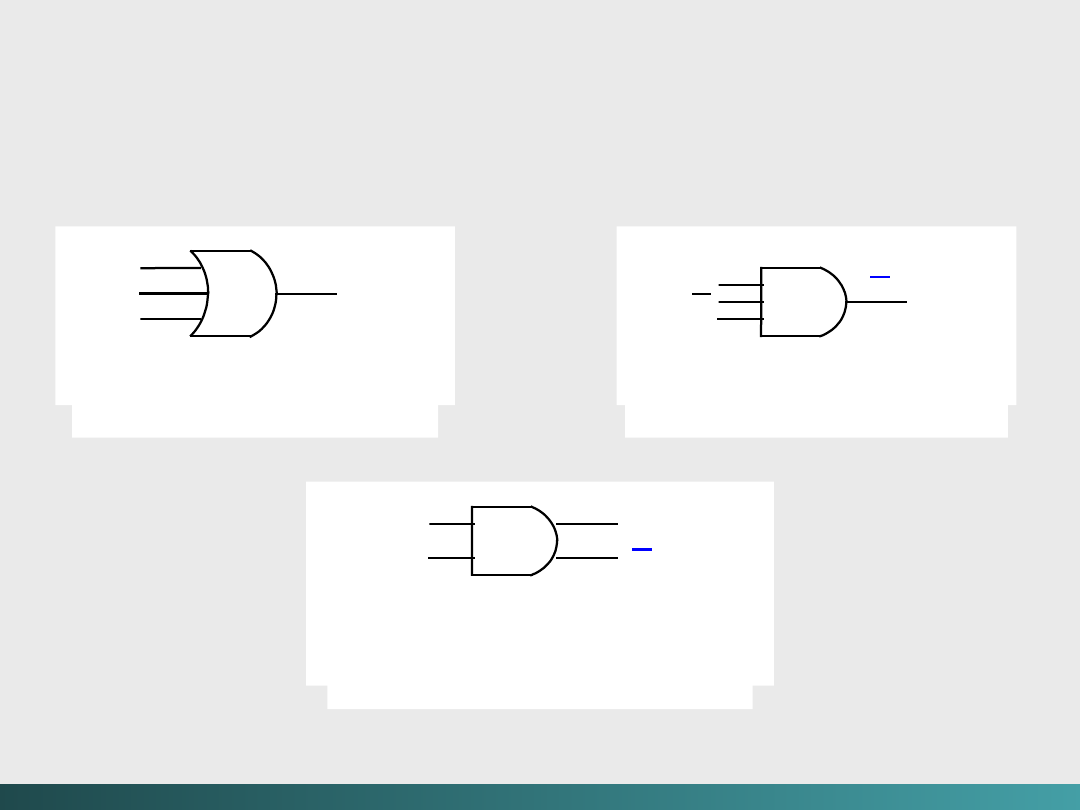
Bramki wielowejściowe
Bramki nie są ograniczone do dwuwejściowych. Istnieją różne warianty
co do liczby i typów wejść oraz wyjść.
Algebra Boole’a i logika cyfrowa
Trzywejściowa
bramka
OR
(x + y + z )
x
y
z
Trzywejściowa
bramka
AND
xyz
x
y
z
Q
Q
x
y
Bramka
AND
z dwoma
wejściami i dwoma
wyjściami
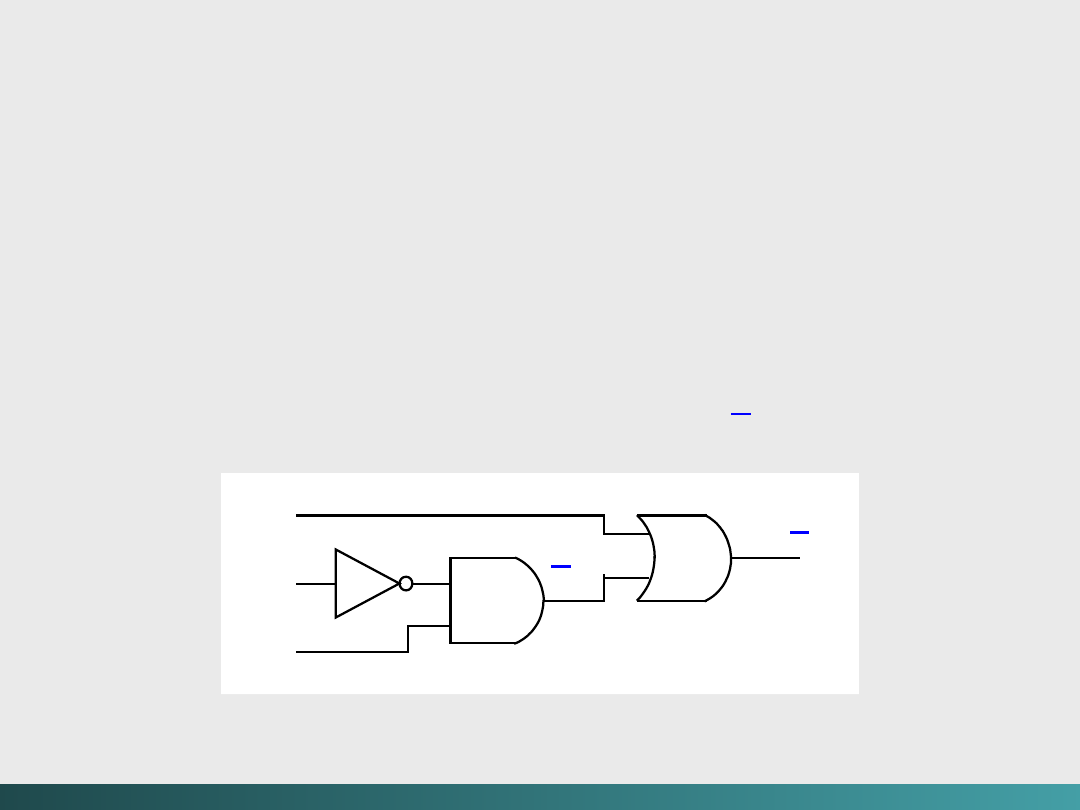
Prosta Boolowska operacja może być reprezentowana przez
prostą bramkę logiczną.
Bardziej złożone wyrażenia Boolowskie są reprezentowane przez
kombinacje bramek AND, OR, i NOT
, wynikające z logicznych
diagramów opisujących wyrażenie wejściowe. Taki logiczny diagram
reprezentuje fizyczną implementację wyrażenia w danym obwodzie
logicznym.
@Janusz Kosiński, 2005
Algebra Boole’a i logika cyfrowa
Diagram logiczny dla F (x, y, z) = x +
yz
x
y
z
yz
x +
yz
@Janusz Kosiński, 2005
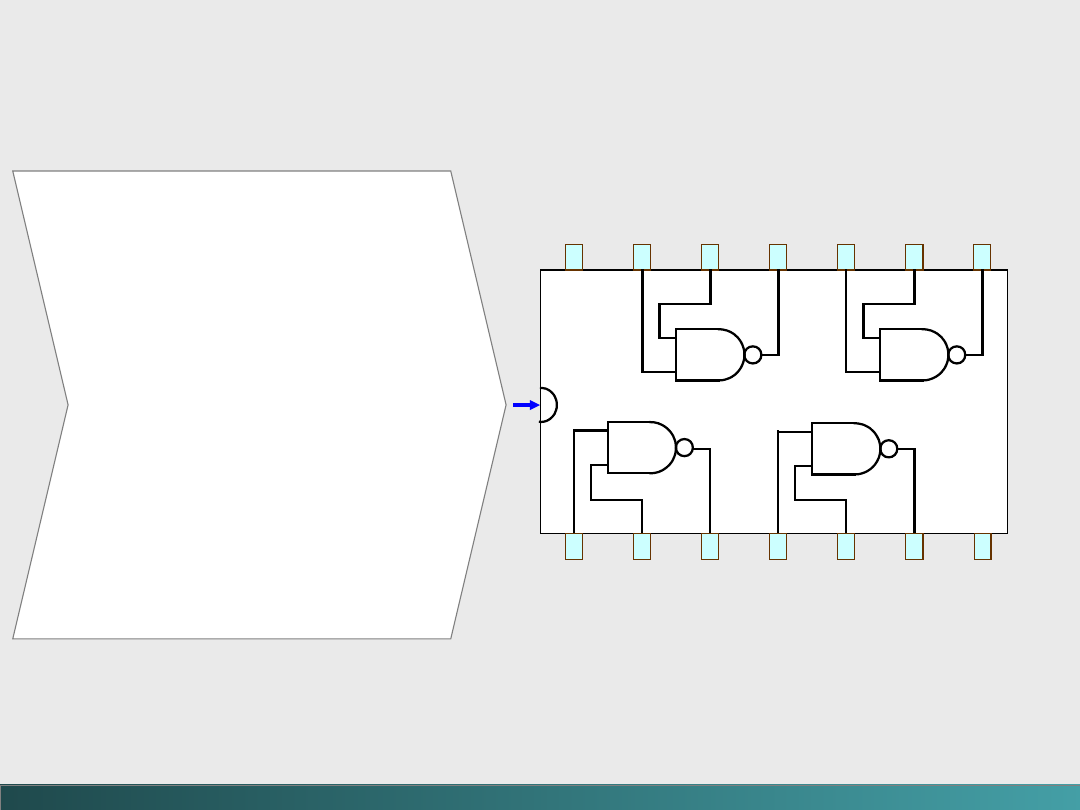
Algebra Boole’a i logika cyfrowa
7
6
5
4
3
2
1
Ziemia
8
9
10
11
12
13
14
+5 V
DC
Chip (mały kryształ
półprzewodnikowy
z krzemu) jest urządzeniem
zawierającym niezbędne
składniki
elektroniczne (tranzystory,
rezystory
i kondensatory) do
zastosowania w
różnych bramkach – składniki
są
bezpośrednio wykonywane w
chipie, ze względu na
oszczędność
miejsca i bezpośredniość
połączeń.
Chip jest montowany w
plastykowym
lub ceramicznym pojemniku
posiadającym zewnętrzne styki.
Bramki nie są sprzedawane indywidualnie – są
sprzedawane w jednostkach nazywanych obwodami
scalonymi (integrated circuits - IC).
Rysunek przedstawia budowę
prostego chipu SSI
@Janusz Kosiński, 2005
Do budowy układów scalonych, zawierających podstawowe
operatory Boolowskie wejścia i wyjścia jest stosowana logika
kombinacyjna.
Kluczowym zagadnieniem tej logiki jest założenie, że każde wyjście
zawsze bazuje na sygnałach wejść (jest funkcją wyjść) i w każdej
chwili odpowiada wartościom sygnałów na wejściach.
Dany obwód kombinacyjny może zawierać kilka wyjść, z których
każde może reprezentować odmienną funkcję Boolowską.
Algebra Boole’a i logika cyfrowa
@Janusz Kosiński, 2005
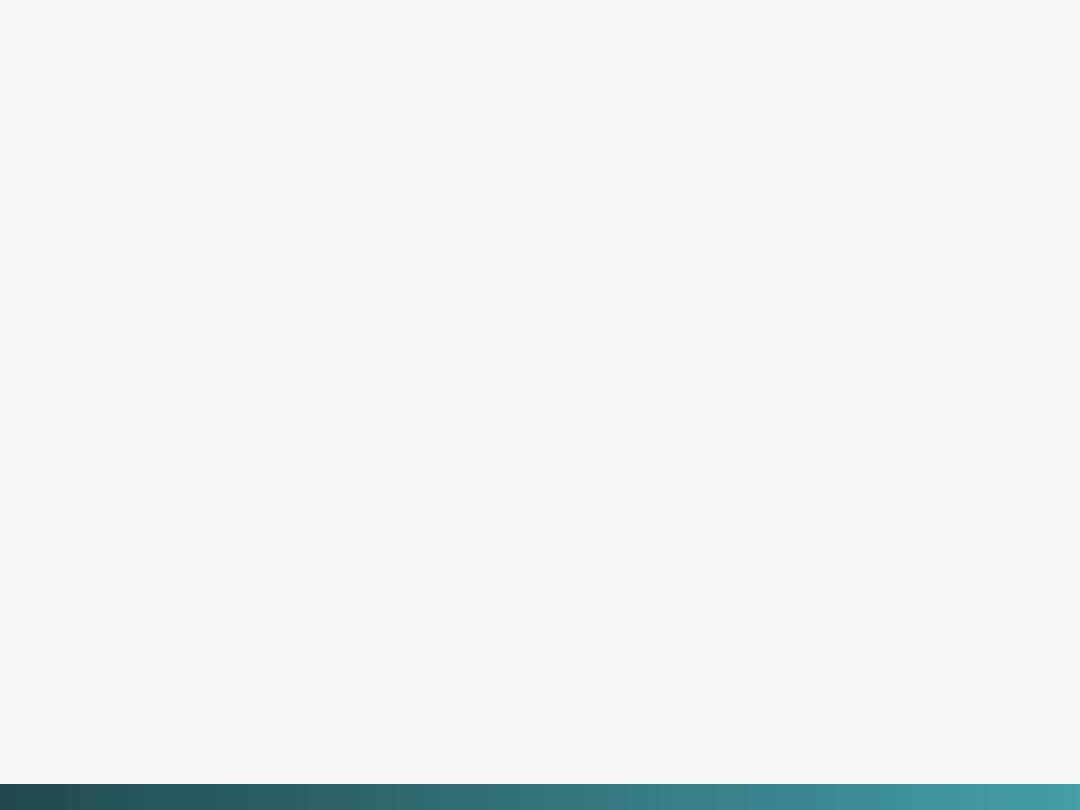
Półsumator
jest bardzo
prostym obwodem, w
rzeczywistości mało
użytecznym ponieważ może
dodać tylko dwa bity.
Można rozszerzyć ten obwód
do postaci umożliwiającej
dodawanie większych liczb
binarnych.
WE
WY
x
y
Sum
a
Przeniesien
ie
0 0
0
0
0 1
1
0
1 0
1
0
1 1
0
1
Tablica prawdy
półsumatora
Algebra Boole’a i logika cyfrowa
Diagram logiczny
półsumatora
x
y
suma
przeniesienie
0 + 0 = 0, 0 + 1 = 1 + 0 = 1, oraz 1 + 1 =
10
@Janusz Kosiński, 2005
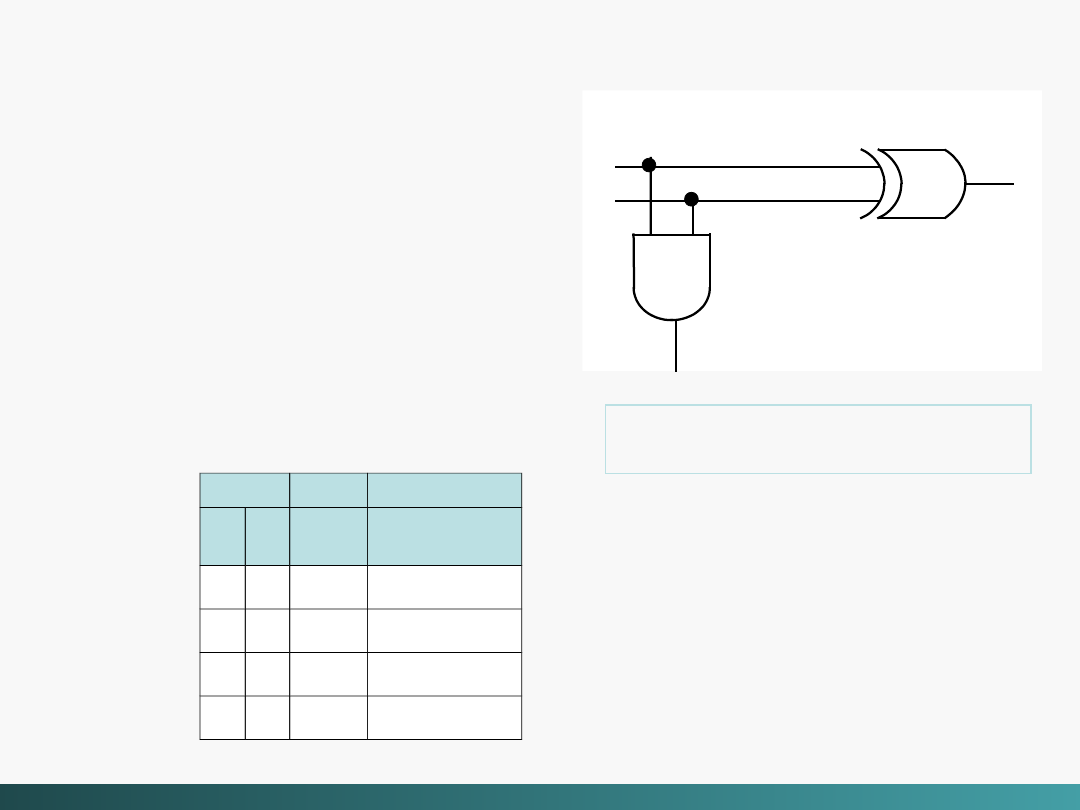
Algebra Boole’a i logika cyfrowa
x
y
Przeniesieni
e WY
suma
Przeniesieni
e WE
WE
WY
x
y
Przeniesieni
e
WE
Suma
Przeniesieni
e
WY
0 0
0
0
0
0 0
1
1
0
0 1
0
1
0
0 1
1
0
1
1 0
0
1
0
1 0
1
0
1
1 1
0
0
1
1 1
1
1
1
Sumator pełny
składa się z dwóch półsumatorów i jednej bramki
OR
@Janusz Kosiński, 2005
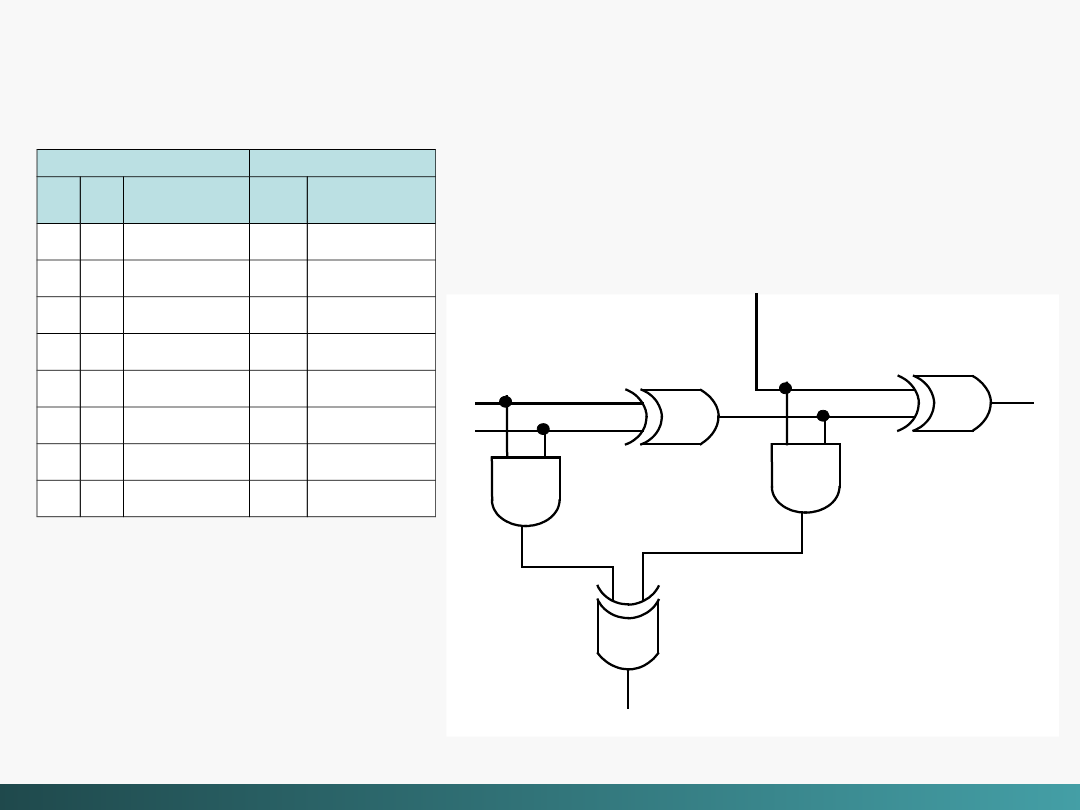
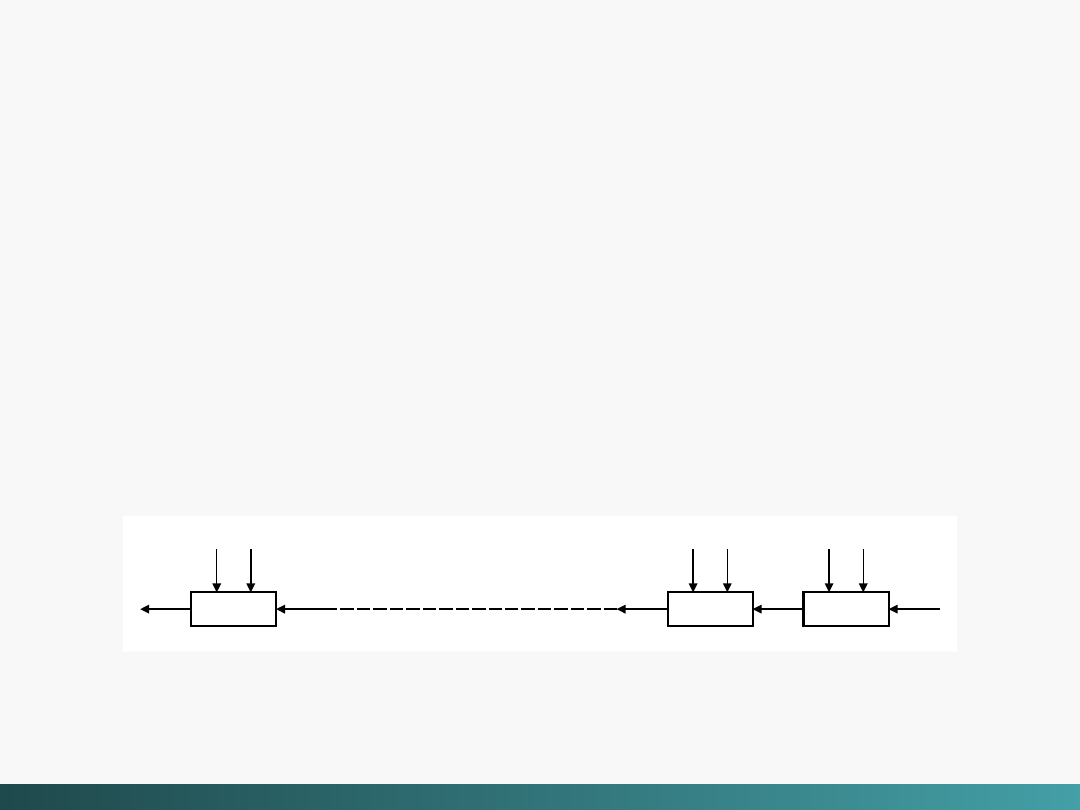
Sumator pełny nie może dodać trzech bitów
. Można
zbudować sumator dodający dwa 16 bitowe słowa poprzez
zastosowanie 16 replikacji pojedynczego sumatora. Z
wyjścia sumatora wprowadzane są dane do następnego
sumatora.
Taki sumator jest bardzo wolny i nie ma praktycznego
zastosowania – pokazany jest celem ilustracji zasady
dodawania. Współczesne sumatory opierają się na modyfikacjach
funkcji przenoszenia – chodzi o skrócenie ścieżki przeniesienia.
Algebra Boole’a i logika cyfrowa
sumator
Y
0
X
0
P
0
P
1
sumator
Y
1
X
1
P
2
P
15
sumator
Y
15
X
15
P
WY
@Janusz Kosiński, 2005
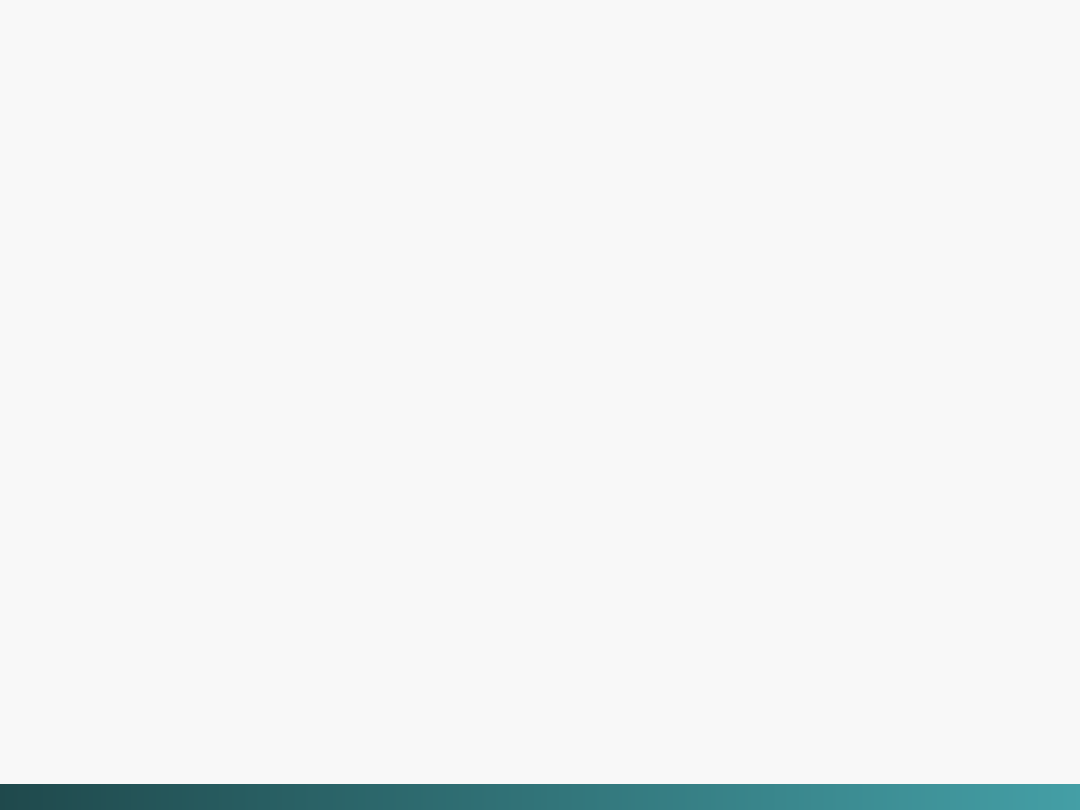
Sumatory są bardzo ważnymi obwodami –
komputer nie może
istnieć bez możliwości dodawania.
Równie ważną operacją wykonywaną przez komputery jest
dekodowanie binarnych operacji ze zbioru n wejść do 2
n
wyjść.
Dekoder wykorzystuje wejścia oraz ich wartości do
wyspecyfikowania jednej linii wyjściowej.
To oznacza że tylko jedno wyjście jest ustawiane na „1” przy
pozostałych ustawianych na „0”.
Dekodery są normalnie definiowane poprzez liczbę wejść i
wyjść – np. dekoder o 3 wejściach i 8 wyjściach jest nazywany
dekoderem 3 na 8.
Każdy adres w pamięci komputera jest przedstawiany w postaci
liczby binarnej. Kiedy w operacjach komputerowych występuje
odwołanie do adresu pamięci to wymagane jest zastosowanie
dekodera.
Algebra Boole’a i logika cyfrowa
@Janusz Kosiński, 2005
Algebra Boole’a i logika cyfrowa
Dekoder
n Wejść
2
n
Wyjść
x
y
x
y
x
y
x
y
x
y
Schemat logiczny
dekodera
Symbol
dekodera
@Janusz Kosiński, 2005
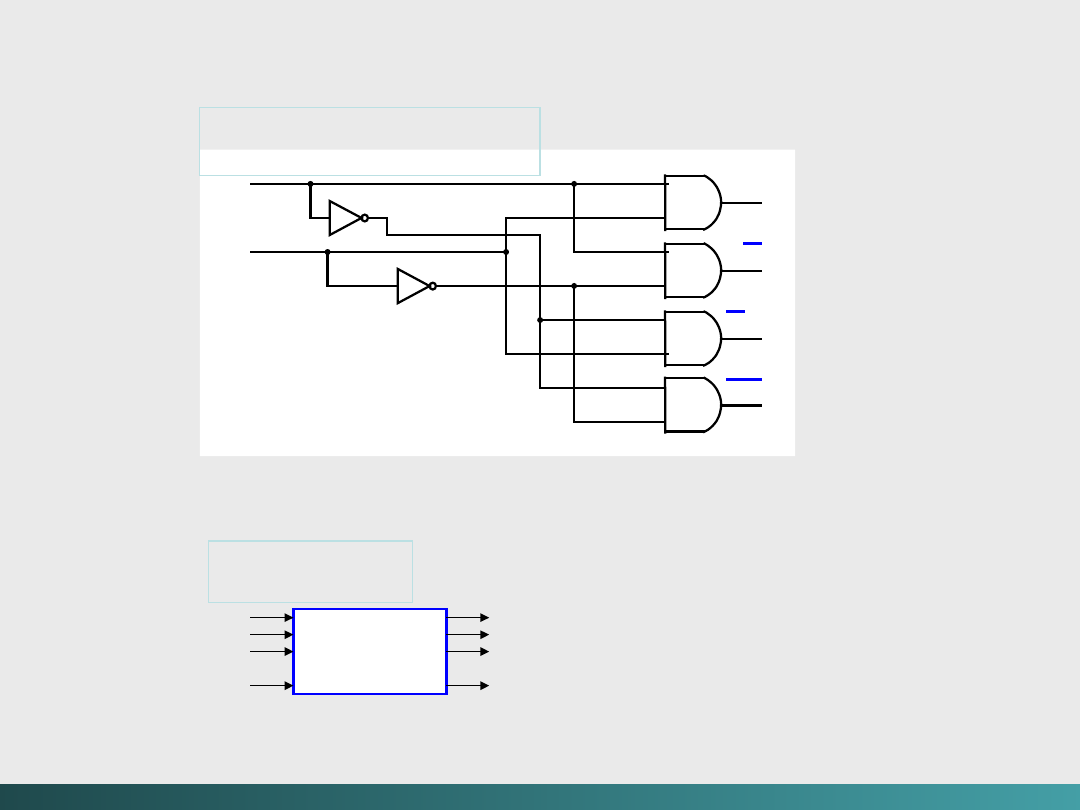
Innym obwodem z obszaru logiki kombinacyjnej jest
multiplekser
. Obwód wybiera informację z jednego wejścia i
przekazuje ją na wyjście. Wybór poszczególnych linii wejściowych
jest dokonywany przy pomocy linii sterujących (zbiór zmiennych
wyboru informacji).
Sytuacje wymagające multiplekserów?
- multipleksowania wejść z terminali użytkowników przez
komputery centralne
- korzystanie ze wspólnych modemów dla wielu
komputerów
- wykorzystanie multipleksowania w generatorach
parzystości i
kontrolerach parzystości
(typowe
generatory i kontrolery
parzystości wykorzystują funkcje
XOR)
Algebra Boole’a i logika cyfrowa
@Janusz Kosiński, 2005
Algebra Boole’a i logika cyfrowa
S
1
S
0
I
3
I
2
I
1
I
0
S
1
S
0
I
3
S
1
S
0
I
2
S
1
S
0
I
1
S
1
S
0
I
0
Schemat logiczny
multipleksera
Symbol
multipleksera
Multiplekser
I
0
I
1
I
2
I
3
S
0
S
1
Jedno WE jest
przekazywane na
WY
Linie
sterujące
@Janusz Kosiński, 2005
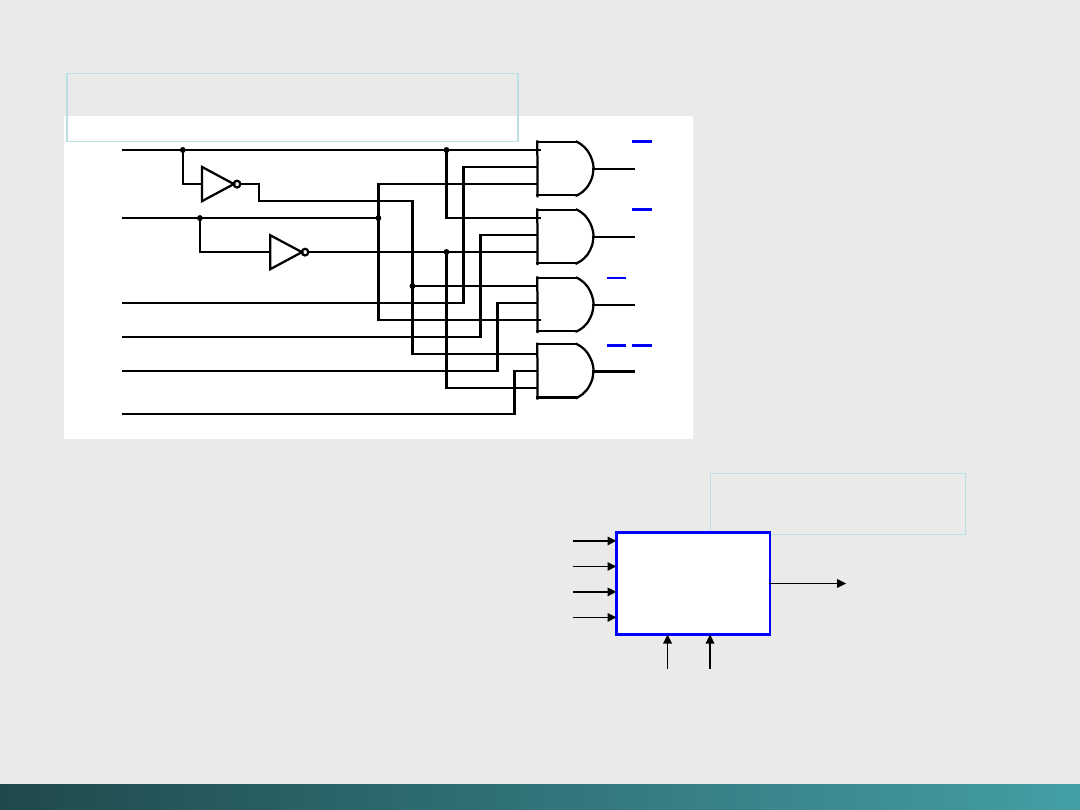
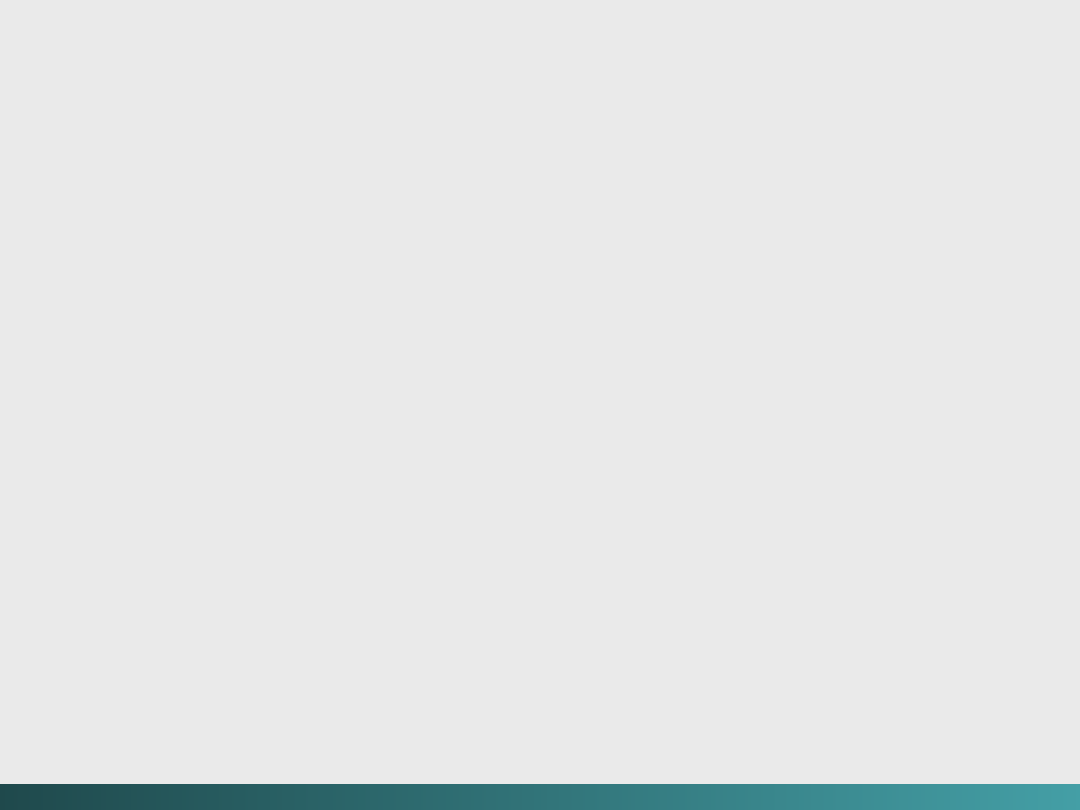
Rysunek na następnym slajdzie ilustruje bardzo prostą ALU z czterema
podstawowymi operacjami –
AND, OR, NOT
oraz
PRZESUNIĘCIE
na dwa słowa
maszynowe, każde po 2 bity.
Linie sterujące f
0
i f
1,
determinują, która operacja będzie
wykonywana przez CPU.
Sygnał 00
jest używany dla dodawania (A
+
B)
Sygnał 01
jest używany dla
NOT
A
Sygnał 10
jest używany dla A
OR
B
Sygnał 11
jest używany dla A
AND
B
Linie wejściowe A
0
i A
1
wskazują na 2 bity w jednym słowie,
podczas gdy B
0
and B
1
wskazują na drugie słowo. C
0
i C
1
reprezentują linie wyjściowe.
Algebra Boole’a i logika cyfrowa
@Janusz Kosiński, 2005
Algebra Boole’a i logika cyfrowa
Przep
ełnien
ie
Prosta 2 bitowa
ALU
C
0
C
1
Wyjście
Dekoder
f
0
f
1
Wejści
e
A
0
A
1
B
0
B
1
Półsumato
r
Sumator
Przesunięcie
@Janusz Kosiński, 2005
Główną słabością kombinacyjnych obwodów scalonych
jest
brak pamięci.
Do tego celu stosowane są obwody sekwencyjne.
Do zapamiętywania stanu poprzednich wejść obwód
sekwencyjny musi posiadać pewien rodzaj elementów
magazynujących, w których
Wyjście
jest zależne od stanu
Wejścia.
Powszechnie stosowane jest nazywanie takiego sposobu
przechowywania
przerzutnikiem.
Stan takiego
przerzutnika jest funkcją poprzedniego wejścia do
obwodu. Czyli zmienne wyjście zależy od bieżącego stanu
obwodu i od poprzedniego stanu wejścia.
Algebra Boole’a i logika cyfrowa
@Janusz Kosiński, 2005
Należy więc wprowadzić sposób porządkowania zdarzeń.
Fakt, że obwód sekwencyjny używa wiedzy o poprzednim
wejściu do zdeterminowania wyjścia wymaga ustalania
porządku zdarzeń.
Niektóre obwody sekwencyjne są
asynchroniczne
, co
oznacza że stają się one aktywne w chwili zmiany dowolnej
wartości wejściowej.
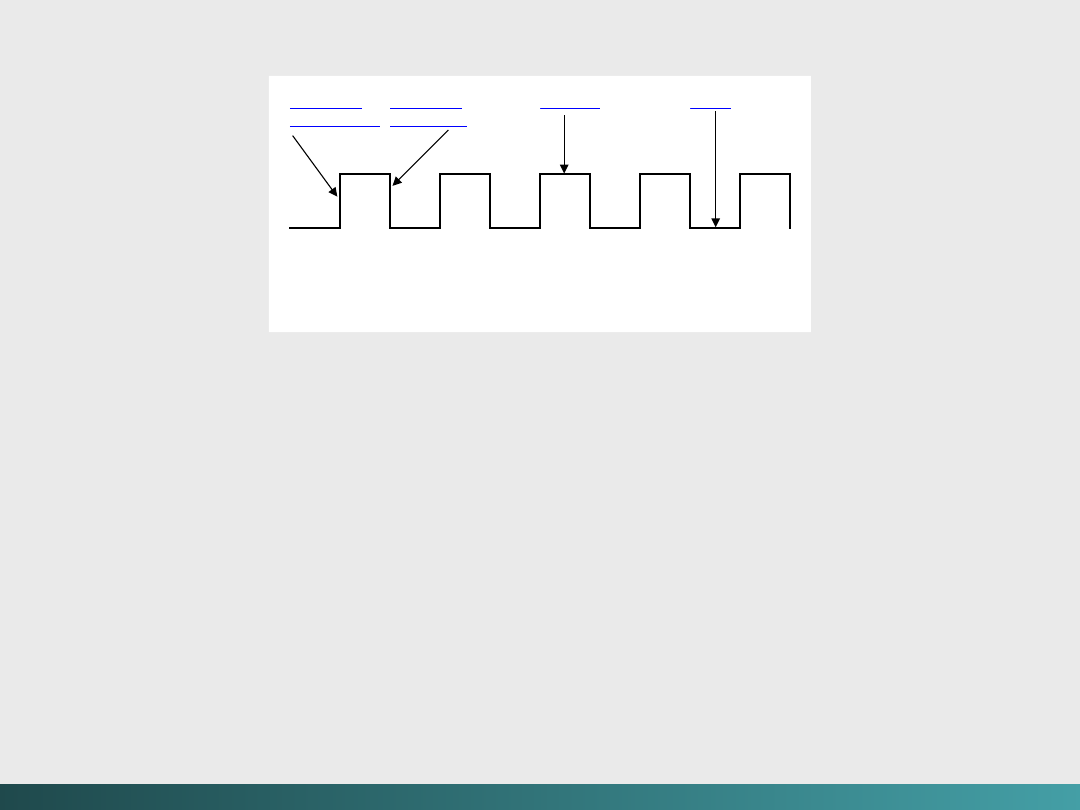
Synchroniczne
obwody sekwencyjne
używają
zegara
do porządkowania zdarzeń.
Zegar jest obwodem, który emituje serie impulsów o dużej
dokładności w zakresie trwania impulsu
(szerokości impulsu)
oraz przerwy miedzy impulsami
(interwałów).
Tak interwał
jest nazywany okresem zegara. Prędkość zegara jest
ogólnie rzecz ujmując mierzona w megahertzach
(MHz)
lub
milionach impulsów na sekundę.
Algebra Boole’a i logika cyfrowa
@Janusz Kosiński, 2005
Zegar jest stosowany przez obwód sekwencyjny do
podejmowania decyzji, kiedy należy uaktualnić stan obwodu
(kiedy
„bieżące”
wartości wejść stają się
„minionymi”
wartościami wejść?). Czyli wejście obwodu może przyjąć
„na
przechowanie”
tylko w określonych chwilach czasu.
Większość obwodów sekwencyjnych jest typu „wyzwalanie
krawędziowe”, to oznacza, że dopuszczają zmianę stanu tylko w
czasie narastania lub opadania impulsu sygnału zegara.
Algebra Boole’a i logika cyfrowa
Sygnał zegara wskazujący
dyskretny upływ czasu
Krawędź
opadania
Wysoki
Niski
Krawędź
narastania
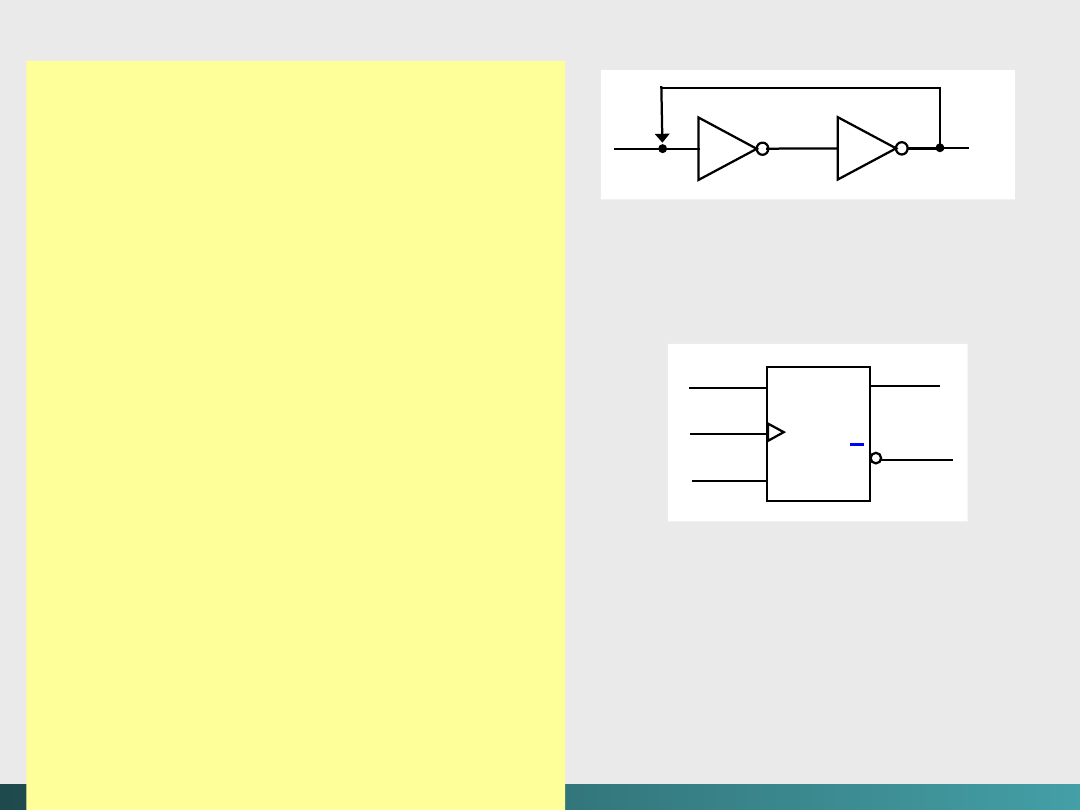
@Janusz Kosiński, 2005
Obwód stosujący wyzwalanie
poziomów pozwala na zmianę
stanu w czasie gdy sygnał zegara
jest wysoki lub niski.
Wielu autorów używa terminu
przerzutnik
lub
flip-flop
wymiennie.
Od strony technicznej przerzutnik
jest wyzwalany poziomem zaś flip-
flop krawędzią (narastaniem lub
opadaniem)
Zapamiętywanie stanu
poprzedniego w obwodach
sekwencyjnych polega na
zastosowaniu sprzężenia
zwrotnego.
Bardzo proste sprzężenie zwrotne
używa dwóch bramek NOT.
Bardziej użyteczny obwód sprzężenia
zwrotnego jest wykonany z dwóch
bramek NOR.
Jest to jedna z podstawowych jednostek
pamięci nazywanych SR Flip-Flop
(przerzutnik)
SR oznacza – SET / RESET
Algebra Boole’a i logika cyfrowa
Q
Przykład prostego sprzężenia
zwrotnego:
Jeżeli Q = 0 to zawsze będzie 0,
Jeżeli Q = 1 to zawsze będzie 1.
S
C
R
Q
Q
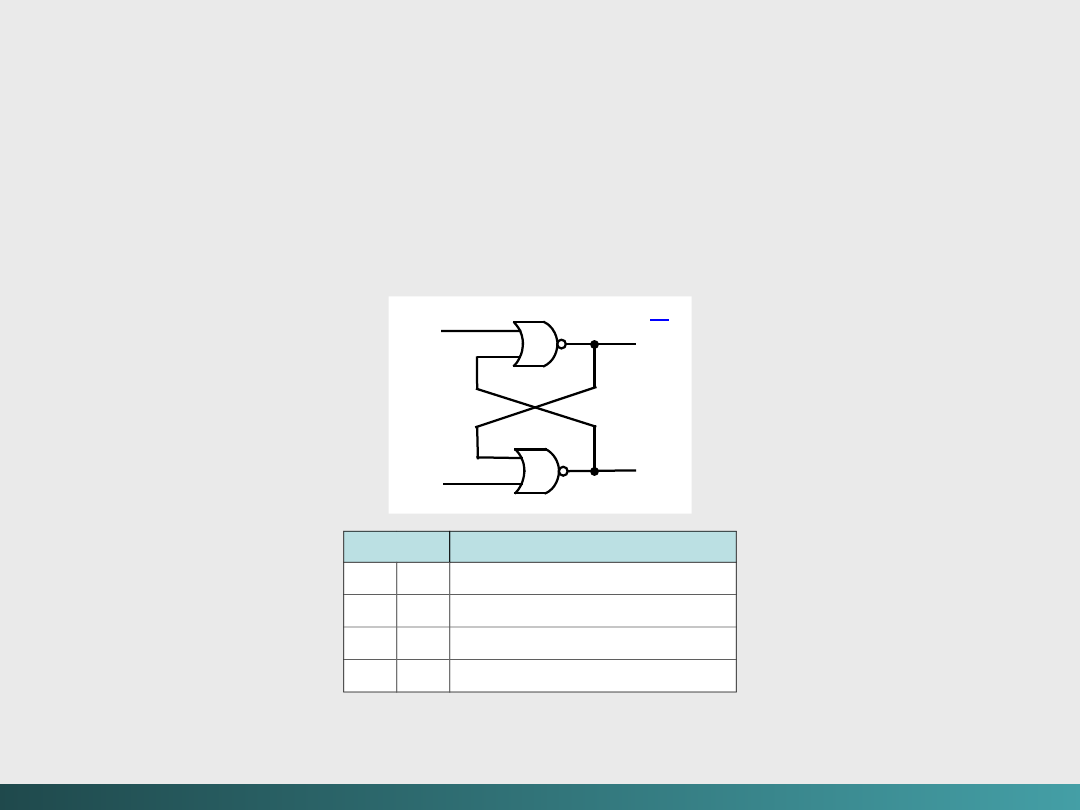
@Janusz Kosiński, 2005
Możemy opisać dowolny przerzutnik używając tablicy prawdy -
wskazującej jaki będzie stan następny, bazujący na stanie
aktualnym i stanach poprzednich.
Notacja Q(t) reprezentuje stan bieżący zaś Q(t+1) wskazuje stan
następny (który przerzutnik powinien przyjąć przy następnym
impulsie zegara).
Algebra Boole’a i logika cyfrowa
Q
Q
S
R
S
R
Q(t+1)
0
0 Q(t)
– bez zmian
0
1 0
– resetowanie do 0
1
0 1
– ustawianie na 1
1
1
niezdefiniowane
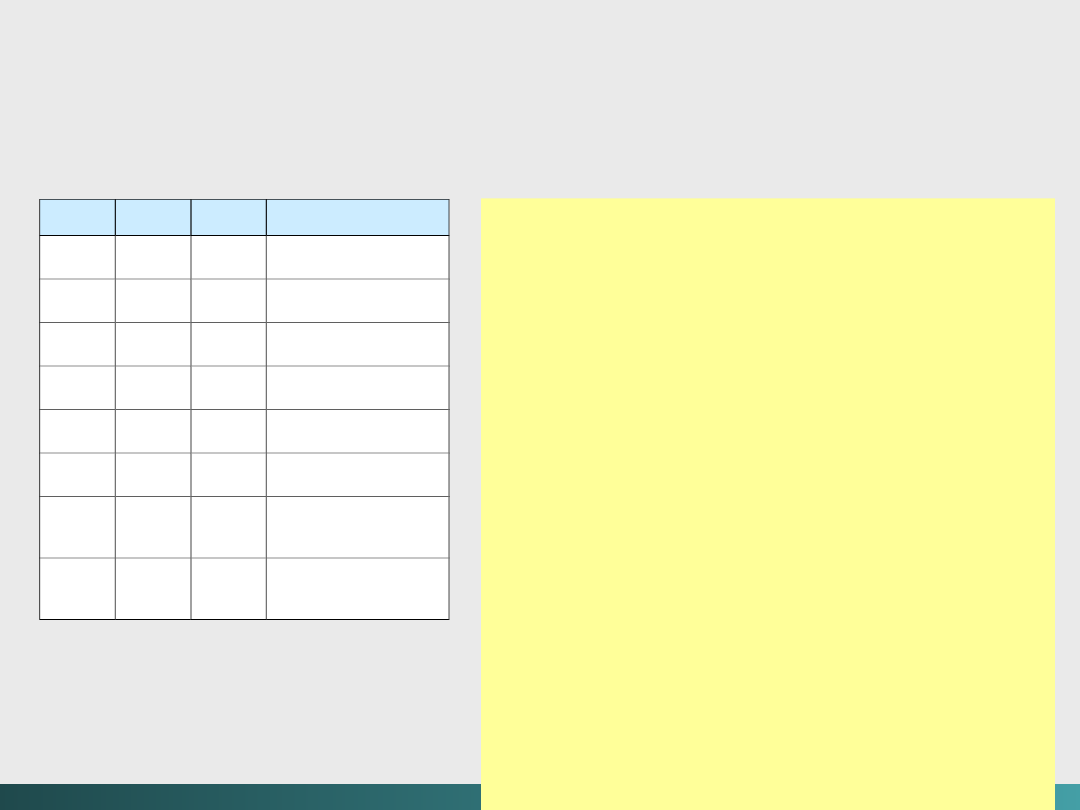
@Janusz Kosiński, 2005
S
R
Q(t)
Q(t+1)
0
0
0
0
0
0
1
1
0
1
0
0
0
1
1
0
1
0
0
1
1
0
1
1
1
1
0
Nie
zdefiniowane
1
1
1
Nie
zdefiniowane
SR
Flip-Flop
wykazuje interesujące zachowania. Posiada on trzy
wejścia: S, R, oraz bieżące wyjście Q(t). Tablica prawdy ilustruje
pracę obwodu.
Jeżeli S = 0 i R= 0, i bieżący stan
Q(t) = 0, to stan następny Q(t+1) =
0.
Jeżeli S = 0 i R = 0, i Q(t) = 1, to
Q(t+1) = 1.
Aktualne wejścia o wartościach
(0,0) dla (S,R) nie powodują zmian
wyjść w czasie zmiany wartości
sygnałów zegara.
Podobnie wejścia (S,R) = (0,1)
wymuszają stan następny Q(t + 1)
= 0 niezależnie od stanu
poprzedniego (wymuszają ponowne
uruchomienie – resetowanie).
Kiedy (S,R) = (1,0), wtedy wyjście
obwodu jest ustawiane na 1.
Algebra Boole’a i logika cyfrowa
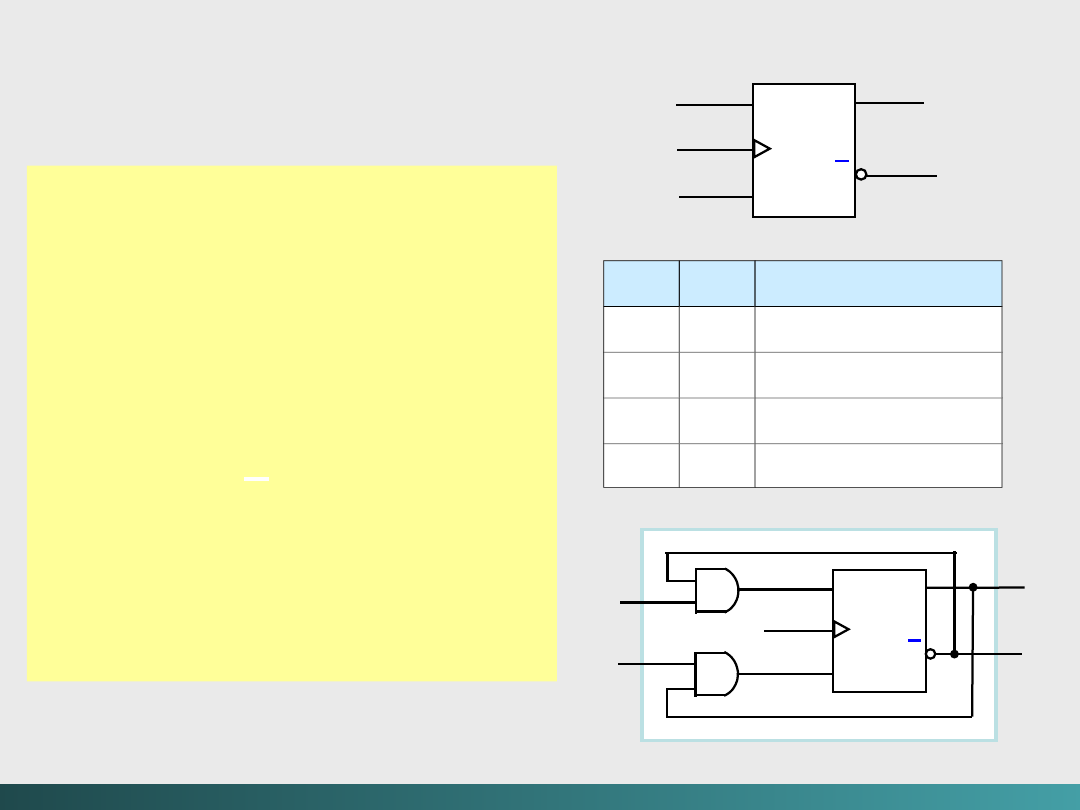
@Janusz Kosiński, 2005
Dodając kilka warunków do
przerzutnika SR, tak że stany
nieustalone się nie pojawią,
uzyskamy
zmodyfikowany SR
Flip-Flop.
Nosi on nazwę
JK Flip-Flop
.
Nazwa pochodzi od nazwiska
inżyniera z Texas
Instruments,
Jacka Kilby’ego
,
wynalazcy obwodu scalonego
(1958).
Algebra Boole’a i logika cyfrowa
J
K
Q(t+1)
0
0
Q(t)
0
1
0 -
(resetowanie do 0)
1
0
0 –
ustawianie na 1
1
1
Q(t)
J
C
K
Q
Q
S
C
R
Q
Q
J
K
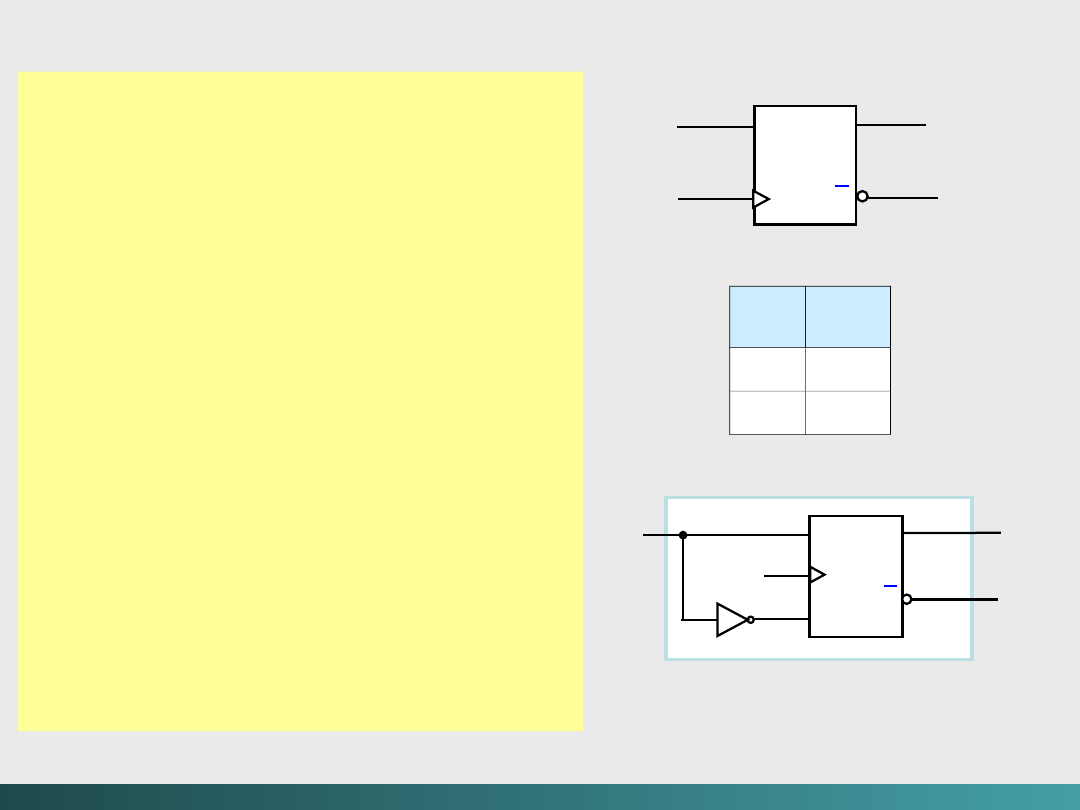
@Janusz Kosiński, 2005
Innym wariantem
SR Flip-Flop
jest
D
(data)
Flip-Flop.
D Flip-Flop
jest prawdziwą
reprezentacją fizycznej pamięci
komputera.
Ten obwód sekwencyjny przechowuje
jeden bit informacji. Jeżeli na wejściu linii
D jest 1, to na wyjściu Q, w czasie
impulsu zegara pojawi się 1. jeżeli
będzie 0, to przy impulsie zegar na
wyjściu pojawi się 0
(pamiętamy, że Q
reprezentuje bieżący stan obwodu).
Z tego
wynika, że wyjściowa wartość 1 oznacza
bieżące przechowywanie
(magazynowanie)
przez obwód wartości 1.
Algebra Boole’a i logika cyfrowa
D
C
Q
Q
S
C
R
Q
Q
D
D
Q(t+
1)
0
0
1
1
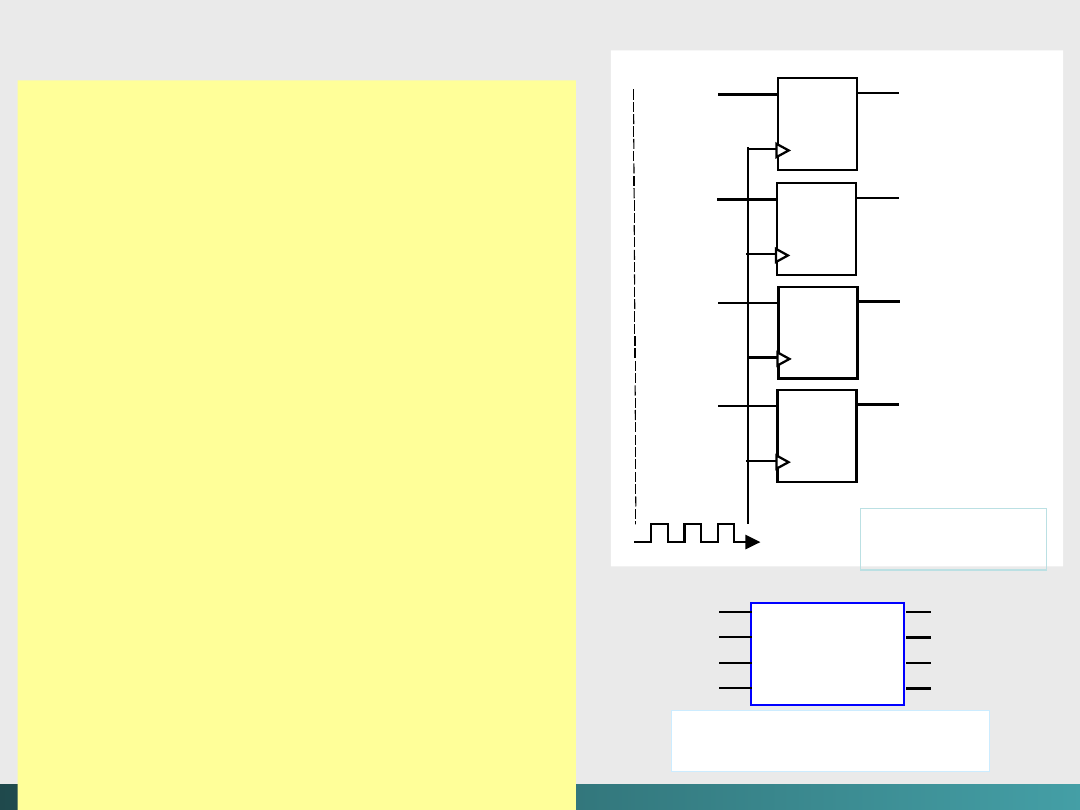
@Janusz Kosiński, 2005
Diagram blokowy dla
rejestru 4 bitowego
Przerzutniki i flip-flopy są stosowane
do budowy bardziej złożonych
obwodów sekwencyjnych. Rejestry,
liczniki, pamięci i przesuwniki
rejestrów - wymagają
przechowywania danych.
Prosty
4 bitowy rejestr
wykorzystuje
cztery
D flip-flopy
. (dla większych słów
należy zastosować większą liczbę
przerzutników).
Należy pamiętać, że
synchroniczny
obwód sekwencyjny nie może zmienić
sam stanu bez wyzwalających impulsów
zegara
.
Rzeczywiste obwody posiadają jeszcze
linie dla zasilania i uziemienia (dającą
zdolność „zerowania” wszystkich
rejestrów).
Algebra Boole’a i logika cyfrowa
We 0 D Q
Wy 0
We 1 D Q
Wy 1
We 2 D Q
Wy 2
We 3 D Q
Wy 3
Zeg
ar
Rejestr 4
bitowy
Rejestr
We
0
We
1
We
2
We
3
Wy
0
Wy
1
Wy
2
Wy
3
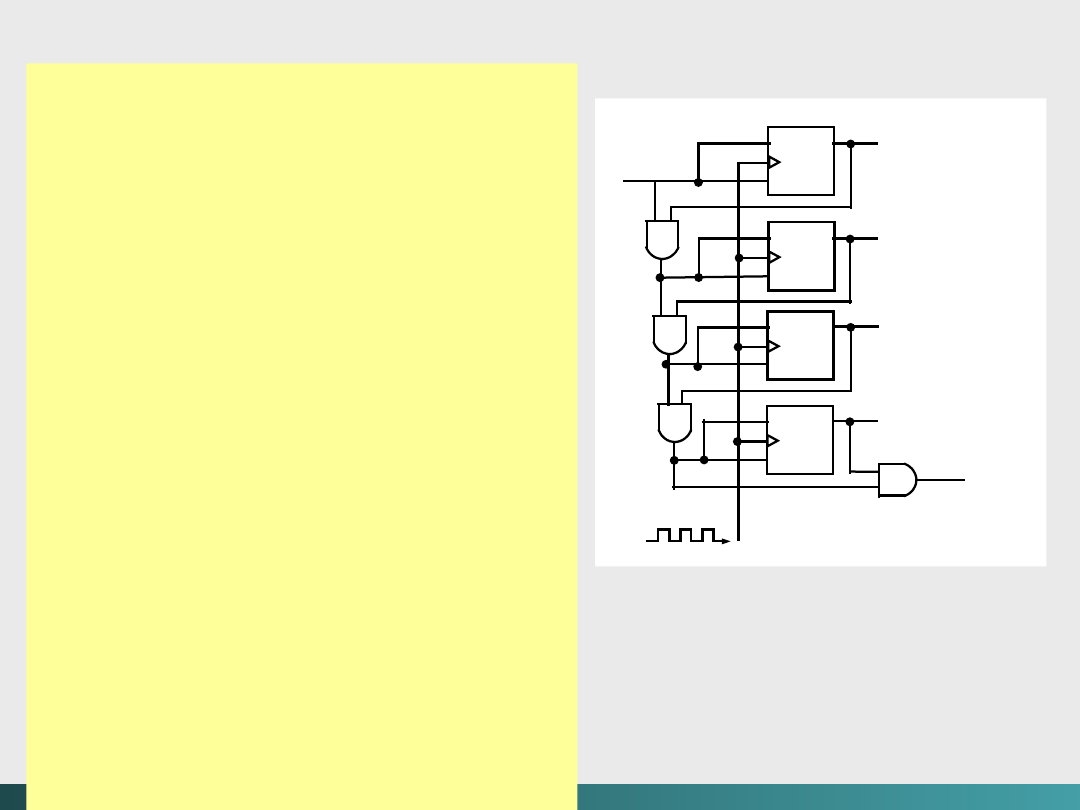
@Janusz Kosiński, 2005
Innym obwodem sekwencyjnym jest
licznik binarny
, (stany
predeterminowane). Jeżeli zaczniemy
odliczanie: 0000, 0001, 0010, 0011, .
. . , to możemy zobaczyć, że bit
najniższy (porządek zapisywania) jest
każdorazowo automatycznie
uzupełniany.
Kiedy nastąpi zmiana stanu z 1 na 0,
to następuje uzupełnienie bitu po lewej
stronie. Każdy następujący bit zmienia
stan z 0 na 1, w chwili gdy wszystkie
bity po prawej stronie są równe 1.
Do tego typu liczników są stosowane
JK
flip-flopy
. Obwód liczy tylko wtedy,
gdy zegar wysyła impulsy i wejście jest
równe 1. Jeżeli wejście jest równe 0, to
obwód nie zmienia stanu.
Algebra Boole’a i logika cyfrowa
4 bitowy licznik synchroniczny
używający JK Flip-Flopów
J
C
K
Q
J
C
K
Q
J
C
K
Q
J
C
K
Q
B 0
B 1
B 2
B 3
Zeg
ar
Liczenie
dostępn
e
Wyjście
przesunięc
ia
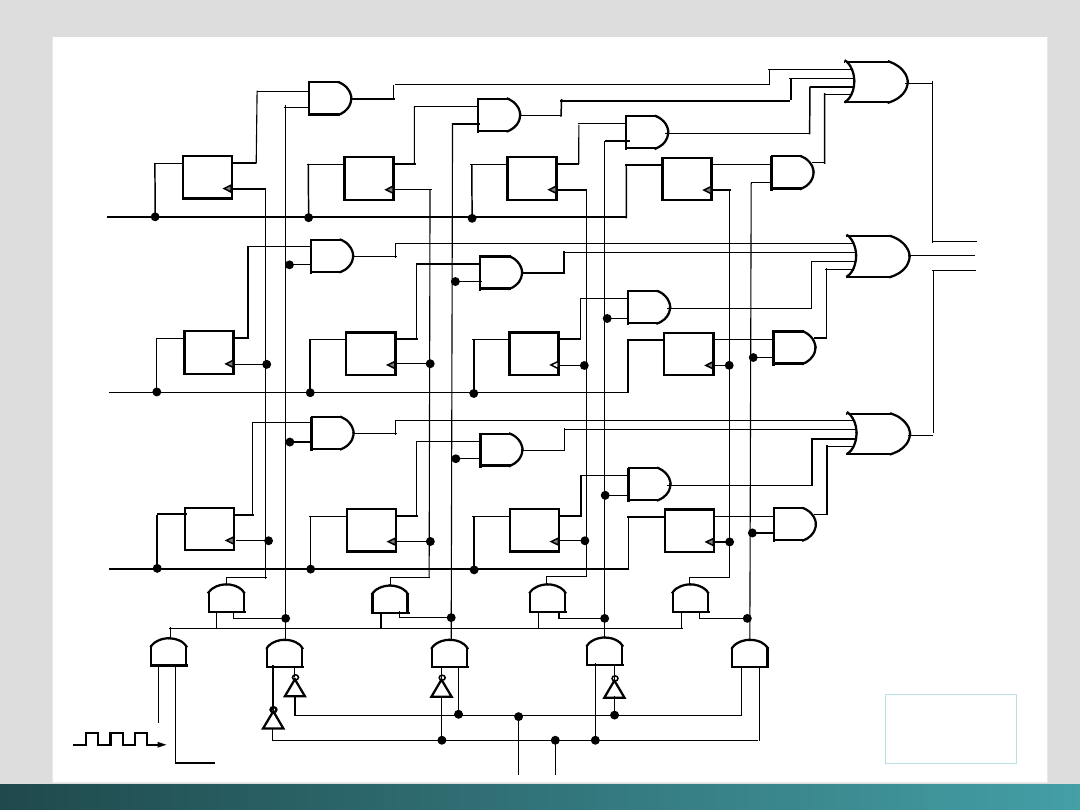
@Janusz Kosiński, 2005
Algebra Boole’a i logika cyfrowa
D Q
D Q
D Q
D Q
D Q
D Q
D Q
D Q
D Q
D Q
D Q
D Q
Słowo 1
Selekcja
Słowo 2
Selekcja
Słowo 3
Selekcja
Słowo 0
Selekcja
S
1
S
0
Wy
1
Wy
2
Wy
0
We
1
We
2
We
0
Słowo 1
Słowo 0
Słowo 2
Słowo 3
Zapis
dostępny
Zega
r
Pamięć
4 x 3

@Janusz Kosiński, 2005
Zapamiętywanie czterech 3 bitowych słów (
pamięć 4 x 3
).
Każda kolumna = jedno 3 bitowe słowo.
Flip-Flopy są synchronizowane zegarem - operacje
zapisywania czy odczytu zawsze dotyczą całego słowa.
Wejścia We
0
, We
1
, i We
2
są liniami używanymi do
przechowywania lub wczytania 3 bitowego słowa do
pamięci.
Linie S
0
i S
1
są liniami adresów, stosowanymi do identyfikacji
słowa w pamięci. (S
0
i S
1
są liniami wejściowymi dla dekodera
2 na 4, odpowiedzialnego za selekcję właściwego słowa w
pamięci).
Trzy linie wyjściowe (Wy
1
,Wy
2
, i Wy
3
) są używane przy
odczycie słów z pamięci.
Algebra Boole’a i logika cyfrowa
@Janusz Kosiński, 2005
Minimalizacja obwodów logicznych
redukuje liczbę
składników w fizycznej implementacji – mniejsza liczba
składników powoduje szybszą pracę obwodów.
Redukcja wyrażeń Boolowskich może być wykonywana przy
pomocy tzw.
map Karnaugh (siatek Karnaugh)
Mapy Karnaugh
lub K-mapy są graficzną metodą reprezentacji
funkcji Boole’a.
Mapa taka jest po prostu tablicą używaną do wyszczególniania
wartości danych wyrażeń Boolowskich, dla różnych wartości
wejściowych.
Wiersze i kolumny tych tabel odpowiadają możliwym wartościom
„wejść”
funkcji. Każda komórka reprezentuje
„wyjście”
funkcji dla tych
możliwych wejść.
Algebra Boole’a i logika cyfrowa
@Janusz Kosiński, 2005
Jeżeli produkt
term
zawiera wszystkie zmienne dokładnie tylko raz, dopełniające lub
nie, to taki produkt nazywamy
mintermem
. Np. jeżeli są dwie wartości wejściowe
x
i
y
, to mamy cztery mintermy: x y, x y, x y, i x y, reprezentujące wszystkie możliwe
kombinacje wejść dla tej funkcji. I podobnie dla trzech zmiennych: x, y i z, mamy: x y
z, x y z, x y z, x y z, x y z, x y z, x y z, i x y z.
Mintermy dla 2
zmiennych
Mintermy dla 3
zmiennych
Algebra Boole’a i logika cyfrowa
Minterm
x
y
XY
0
0
XY
0
1
XY
1
0
XY
1
1
Minterm
x
y
z
XYZ
0
0
0
XYZ
0
0
1
XYZ
0
1
0
XYZ
0
1
1
XYZ
1
0
0
XYZ
1
0
1
XYZ
1
1
0
XYZ
1
1
1
_ _ _ _
_ _ _ _ _ _ _ _ _ _ _
_
@Janusz Kosiński, 2005
Tablica prawdy dla
funkcji F (x,y) =
xy
Odpowiadająca K-
mapa
Algebra Boole’a i logika cyfrowa
x
y
x y
0
0
0
0
1
0
1
0
0
1
1
1
y 0 1
x
0
0
0
1
0
1
x
y
x +
y
0
0
0
0
1
1
1
0
1
1
1
1
Tablica prawdy dla
funkcji F (x,y) = x +
y
y 0 1
x
0
0 1
1
1 1
Odpowiadająca K-
mapa
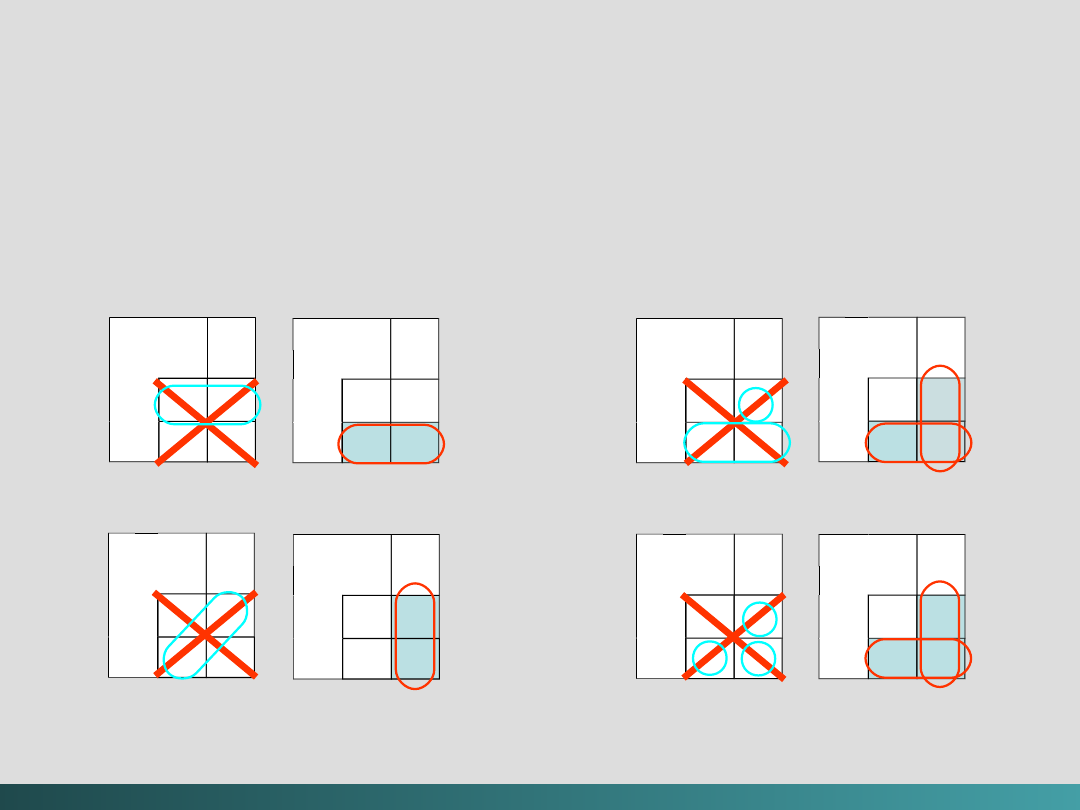
@Janusz Kosiński, 2005
W celu wykorzystania tych map potrzebujemy odpowiedniego pogrupowania komórek.
1. Grupujemy tylko 1.
2. Możemy grupować jedynki w K-mapie jeżeli znajdują się w tych samych wierszach
lub tych samych kolumnach – nie mogą stykać się na przekątnych.
3. Możemy dokonać grupowań jeżeli całkowita liczba wystąpień jedynek w grupie jest
potegą 2.
4. Musimy tworzyć tak duze grupy jak to jest tylko możliwe.
Grupa nie może być na
przekątnej
Groups Must Be as Large as Possible
Algebra Boole’a i logika cyfrowa
y 0 1
x
0
0 1
1
1 1
y 0 1
x
0
0 1
1
1 1
y 0 1
x
0
0 1
1
1 1
y 0 1
x
0
0 1
1
1 1
y 0 1
x
0
0 1
1
1 1
y 0 1
x
0
0 1
1
1 1
y 0 1
x
0
0 1
1
1 1
y 0 1
x
0
0 1
1
1 1
Grupa zawiera tylko 1
Grupa musi być potęgą 2
Grupa musi być tak duża jak to
możliwe
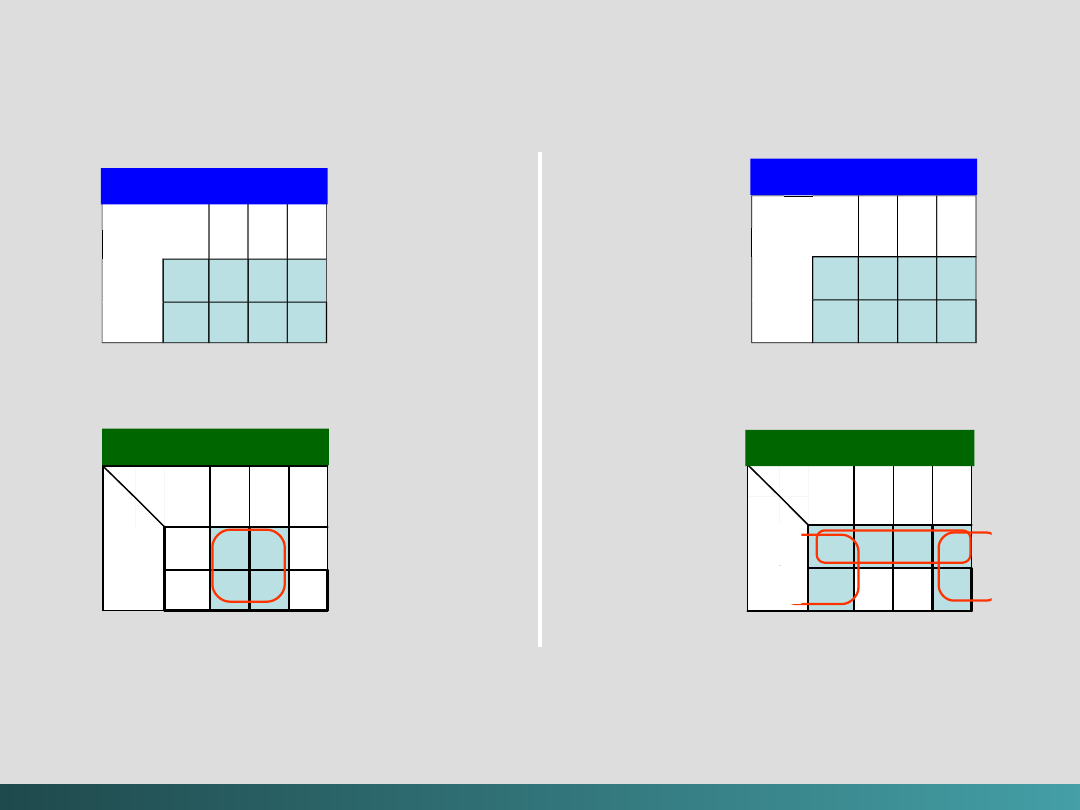
@Janusz Kosiński, 2005
Algebra Boole’a i logika cyfrowa
_ _ _ _
F(x, y, z) =
x y z + x y z + x y z +
x y z
yz 00 01 11 10
x
0
0 1 1 0
1
0 1 1 0
Tablica prawdy
0
1
1
0
1
0
1
1
0
0
x
10
11
01
00
yz
Mapa Karnaugh
_ _ _ _ _ _ _ _ _ _
_
F(x, y, z) =
x y z + x y z + x y z + x y z
+ xyz + xyz
yz 00 01 11 10
x
0
1 1 1 1
1
1 0 0 1
Tablica prawdy
1
0
0
1
1
1
1
1
1
0
x
10
11
01
00
yz
Mapa Karnaugh
1
0
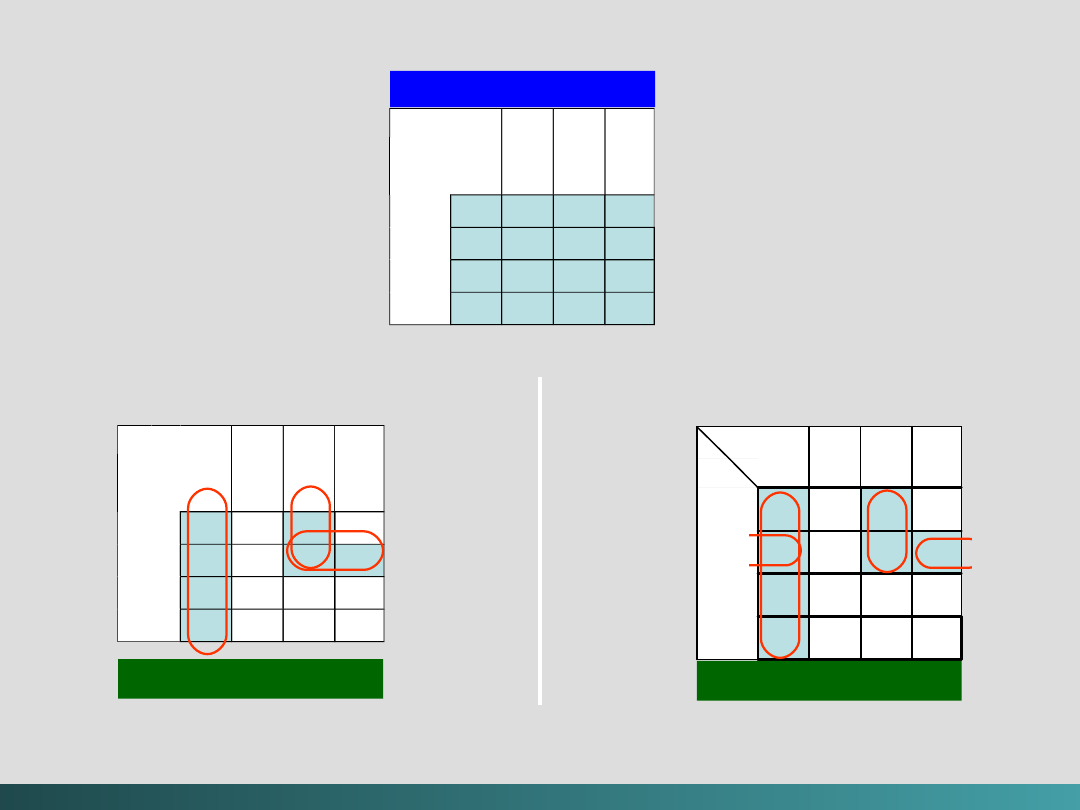
@Janusz Kosiński, 2005
Algebra Boole’a i logika cyfrowa
_ _ _ _
F(w, x, y, z) =
F
1
=
y z + w y z
+ w x y
_ _ _ _
_
F(w, x, y, z) =
F
2
=
y z + w y z
+ w x z
yz
00 01 11 10
w
x
00
1
1
01
1
1
1
11
1
10
1
Tablica prawdy
yz
00 01 11 10
w
x
00
1
1
01
1
1
1
11
1
10
1
1
10
1
11
1
1
1
01
1
1
00
wx
10
11
01
00
yz
11
01
Mapa Karnaugh (F
1
)
Mapa Karnaugh (F
2
)
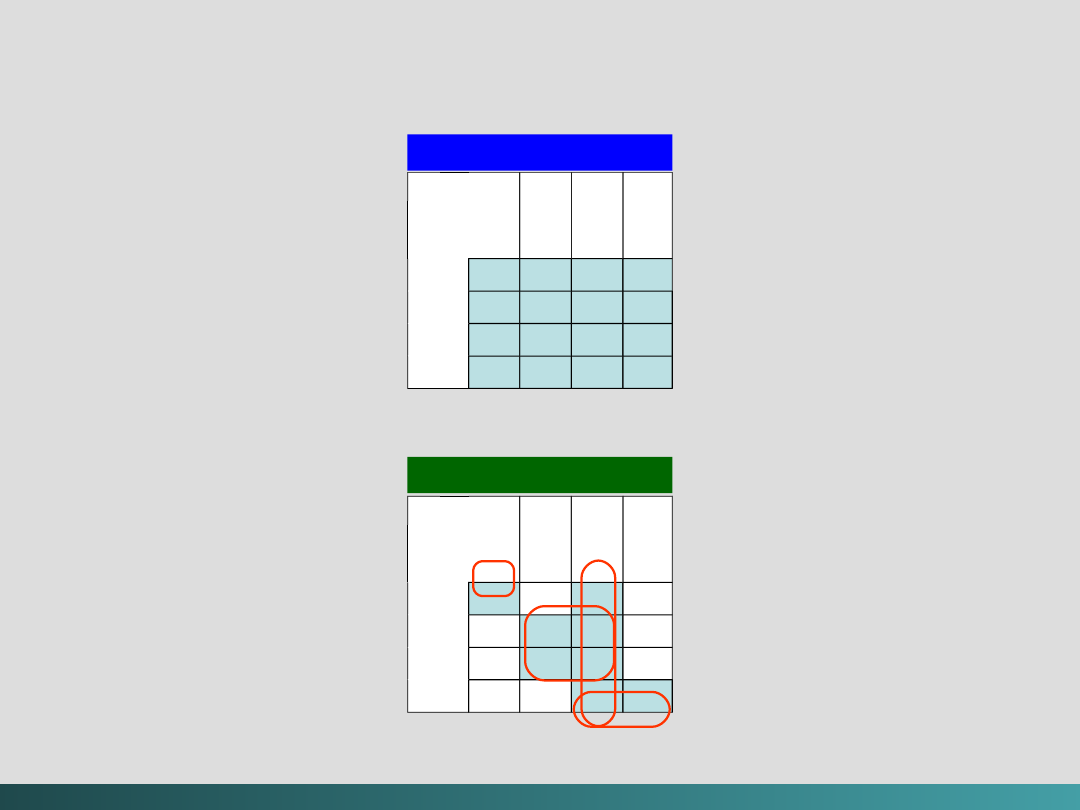
@Janusz Kosiński, 2005
Algebra Boole’a i logika cyfrowa
_ _ _ _ _ _ _ _ _ _ _
_ _
F(w, x, y, z)
=
w x y z + w x y z + w x y z + w x y z + w x y z + w x y
z + w x y z + w x y z
yz
00 01 11 10
w
x
00
1
1
01
1
1
11
1
1
10
1
1
Tablica prawdy
yz
00 01 11 10
w
x
00
1
1
01
1
1
11
1
1
10
1
1
Mapa Karnaugh
Wprowadzenie do prostego
Wprowadzenie do prostego
komputera
komputera
4
@Janusz Kosiński, 2005
Komputer musi manipulować danymi zakodowanymi
binarnie.
Pamięć jest używana do przechowywania danych i instrukcji
programowych (również w postaci binarnej).
Programy muszą dać się wykonywać, zaś dane muszą być
przetwarzane prawidłowo.
Centralna jednostka przetwarzająca
-
central processing
unit (CPU
) jest odpowiedzialna za dosięgnięcie każdej
instrukcji,
zdekodowanie jej i zrealizowanie wskazanej
sekwencji
operacji na właściwych danych.
Wszystkie komputery mają CPU.
Każdą taką jednostkę możemy podzielić na dwie części.
CPU - podstawy
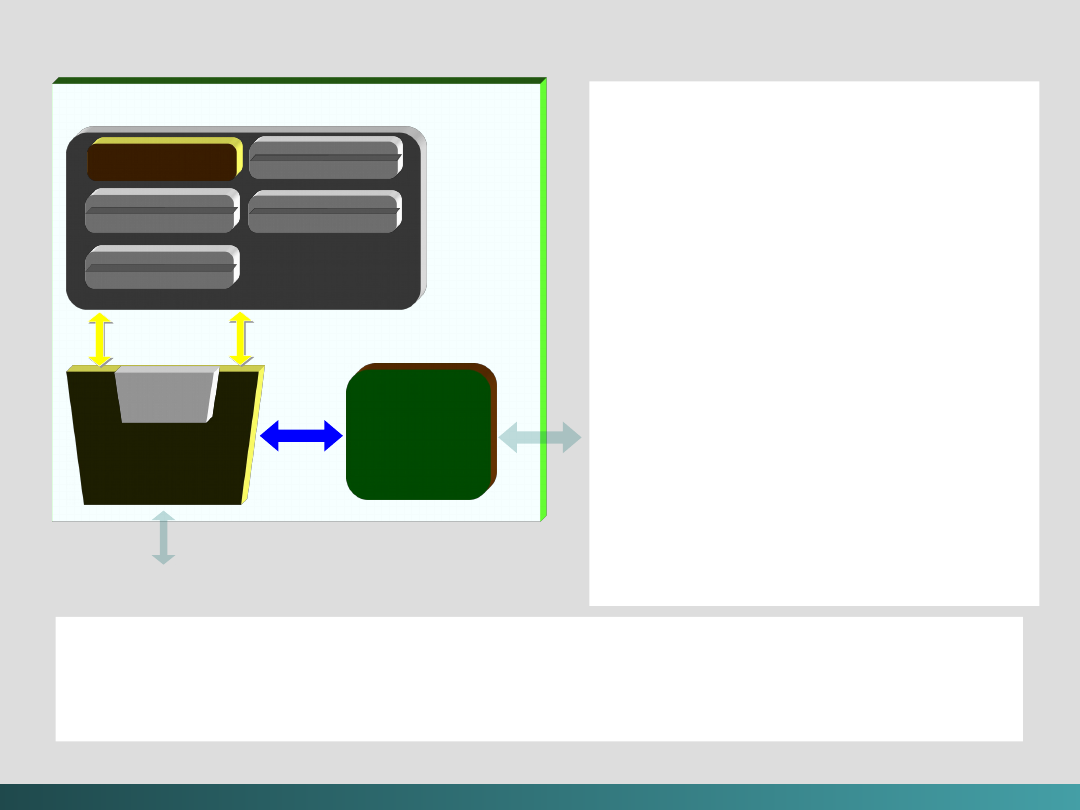
@Janusz Kosiński, 2005
CPU - podstawy
CPU
Rejestry
Rejestry
Licznik
Licznik
Jednostka
Jednostka
arytmetyczno
arytmetyczno
- logiczna
- logiczna
Jednostka
Jednostka
kontrolna
kontrolna
Drugim składnikiem CPU jest
jednostka kontrolna
– moduł
odpowiedzialny za kolejkowanie operacji i prawidłowe adresowanie
danych we właściwym czasie.
Pierwszym składnikiem CPU
jest ścieżka danych - sieć
jednostek magazynujących
(rejestrów),
jednostek
arytmetycznych i
logicznych
(dla realizacji różnych operacji
na danych) połączonych w
sposób, umożliwiający
przemieszczanie danych z
miejsca na miejsce (busy), w
której operacje są
synchronizowane przez zegary
@Janusz Kosiński, 2005
Rejestry
są używane w systemach komputerowych jako miejsca
przechowywania różnego rodzaju danych binarnych, takich jak adresy,
liczniki programów czy dane niezbędne do wykonywania programów.
Rejestry są zlokalizowane w procesorze – szybki dostęp do informacji.
Jako rejestry mogą być zastosowane
D flip-flopy
. Jeden D flip-flop jest
ekwiwalentny
1 bitowemu rejestrowi
, tak że do przechowywania
wielobitowych wartości jest potrzebna kolekcja takich D flip-flopów –
np. w celu zbudowania 16 bitowego rejestru jest potrzebne 16 takich
flip-flopów.
Praca takiej kolekcji musi być synchronizowana zegarem
. Każdy impuls zegara
ustawia stany
wejściowe rejestrów i nie może to być zmienione do chwili
następnego sygnału.
Przetwarzanie danych w komputerach jest z reguły
dokonywane w postaci słów o stałych rozmiarach (przechowywanych w
rejestrach) – stąd większość komputerów posiada rejestry o określonym
rozmiarze.
Rozmiary te to przeważnie - 16, 32, i 64 bity. Liczba rejestrów w maszynie różni
się w zależności od architektury ale jest z reguły potęgą 2 – z najczęściej
spotykanymi 16 i 32.
CPU - podstawy
@Janusz Kosiński, 2005
Informacja jest zapisywana do rejestrów, czytana z rejestrów i
przesyłana od rejestru do rejestru.
Rejestry nie są adresowane w taki sam sposób jak adresowana jest
pamięć.
(każde słowo w pamięci posiada unikatowy binarny adres).
Rejestry są adresowane i manipulowane przy pomocy
jednostki sterującej
.
We współczesnych komputerach występuje wiele wyspecjalizowanych
typów rejestrów: do przechowywania informacji, do przesuwania
wartości, do
porównywania wartości i do liczenia.
Są też rejestry przechowujące wartości tymczasowe, sterujące pętlami
programowymi, wskazujące stan stosu lub rodzaj operacji (np.
przepełnienie, przesunięcie, wyzerowanie,…), czy też rejestry
ogólnego
przeznaczenia – osiągalne dla programistów.
Wiele komputerów posiada zbiory rejestrów (zbiór rejestrów danych,
zbiór rejestrów adresów, ..)
CPU - podstawy
@Janusz Kosiński, 2005
Jednostka arytmetyczno – logiczna
(ALU) odpowiada za operacje
logiczne
(porównywanie) i
arytmetyczne
(dodawanie lub
mnożenie) wymagane podczas wykonywania programów.
Ogólnie rzecz ujmując ALU posiada dwa wejścia i jedno wyjście.
ALU wie które operacje są realizowane dzięki sygnałom z jednostki
sterującej.
CPU - podstawy
Jednostka sterująca
jest ”policjantem” lub „zarządcą ruchu” w CPU.
Monitoruje wykonywanie wszelkich instrukcji i przesyłanie wszelkich
informacji.
Jednostka sterująca „wyciąga” instrukcje z pamięci, dekoduje te
instrukcje,
upewnia się że dane są właściwie rozmieszczone w
odpowiednim czasie, przekazuje informacje do AlU które rejestry
mają być używane,
obsługuje przerwania, …
Jednostka sterująca używa rejestru liczników do poszukiwania
kolejnych
instrukcji wykonawczych i śledzi stan rejestrów czy nie
są przepełnione,
etc ..
@Janusz Kosiński, 2005
System BUS
Układ
BUS
(magistrala)
CPU komunikuje się z innymi składnikami przy pomocy magistrali.
Magistrala jest zbiorem „przewodów” umożliwiających współdzielenie
„ścieżek danych” przez różne podsystemy systemu komputerowego.
Zawierają liczne linie pozwalające na równoległe przemieszczanie bitów.
W jednym czasie, tylko jedno urządzenie
(rejestr, ALU, pamięć lub inny
składnik) może wykorzystywać magistralę- chociaż ten system
współdzielenia doprowadza do swoistych „korków”.
Prędkość magistrali
jest zależna od jej długości i liczby urządzeń
współdzielących. Bardzo często urządzenia są podzielone na główne
(master) i podporządkowane (slave) – gdzie „master” inicjuje działania,
zaś „slave” działa zgodnie z zaleceniami urządzenia nadrzędnego.
Magistrala może mieć postać punkt do punktu (point to point) łącząc
dwa specyficzne składniki lub może być wspólną ścieżką łącząca pewną
liczbę urządzeń wymagających współdzielenia.
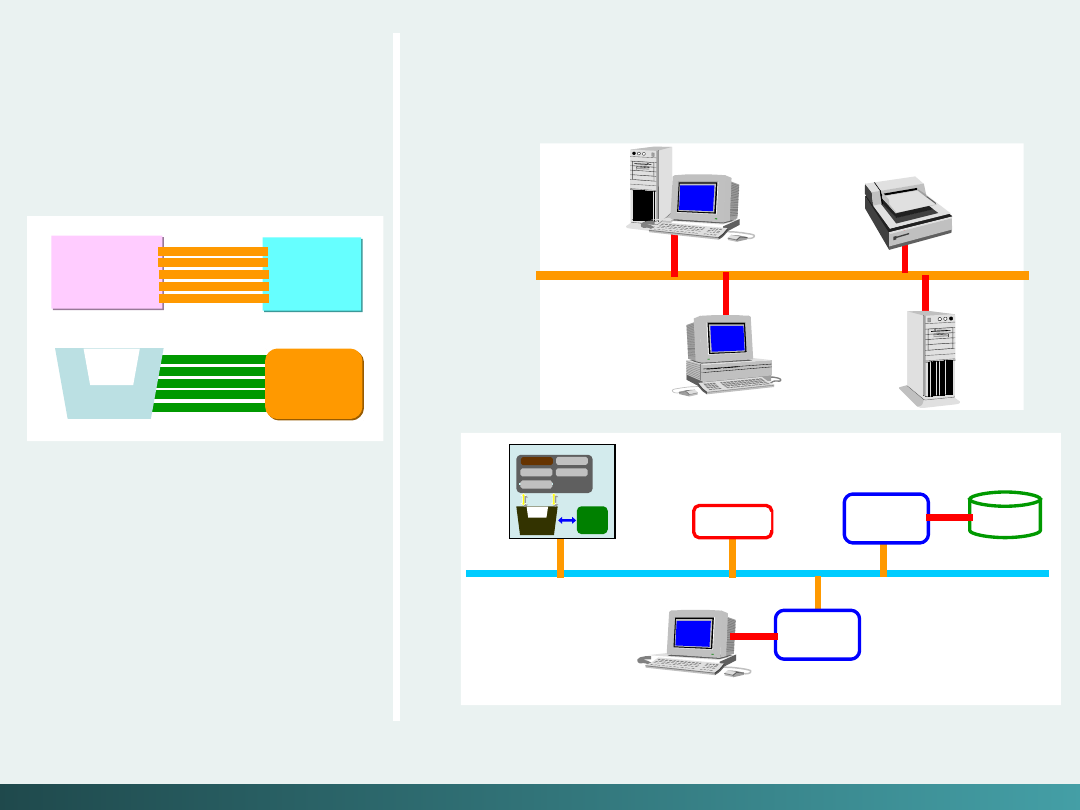
@Janusz Kosiński, 2005
Magistrale
wielopunktowe
Komputer
1
Komputer
2
Serwe
r
plików
Drukark
a
Magistrale „Point-to-
Point”
CPU
Pamięć
Kontrol
er
dysku
Kontrol
er
dysku
Monito
r
Dysk
Port
szeregow
y
Modem
Jednostk
a
kontrolna
ALU
System BUS
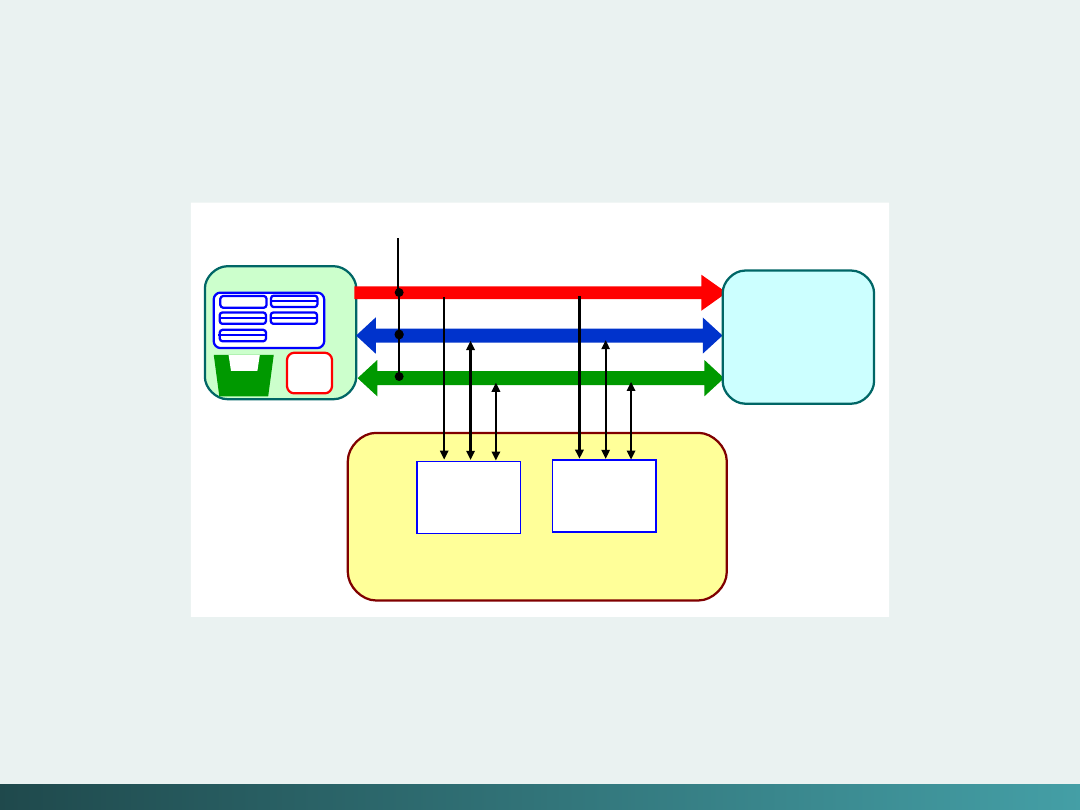
@Janusz Kosiński, 2005
Z powodu tego współdzielenia,
bus protocol
(
zbiór reguł użytkowania
)
jest bardzo ważną sprawą.
CPU
Pamięć
główna
Podsystem WE /WY
Urządzeni
e We / WY
Urządzeni
e We / WY
Szyna
adresowa
Szyna danych
Szyna
sterowania
Zasilan
ie
Składniki typowego układu BUS
Linie danych
(szyny danych)
Linie adresowe
(szyny adresowe)
Linie sterowania
(szyny sterowania) i
linie zasilające
(szyny
zasilające)
System BUS
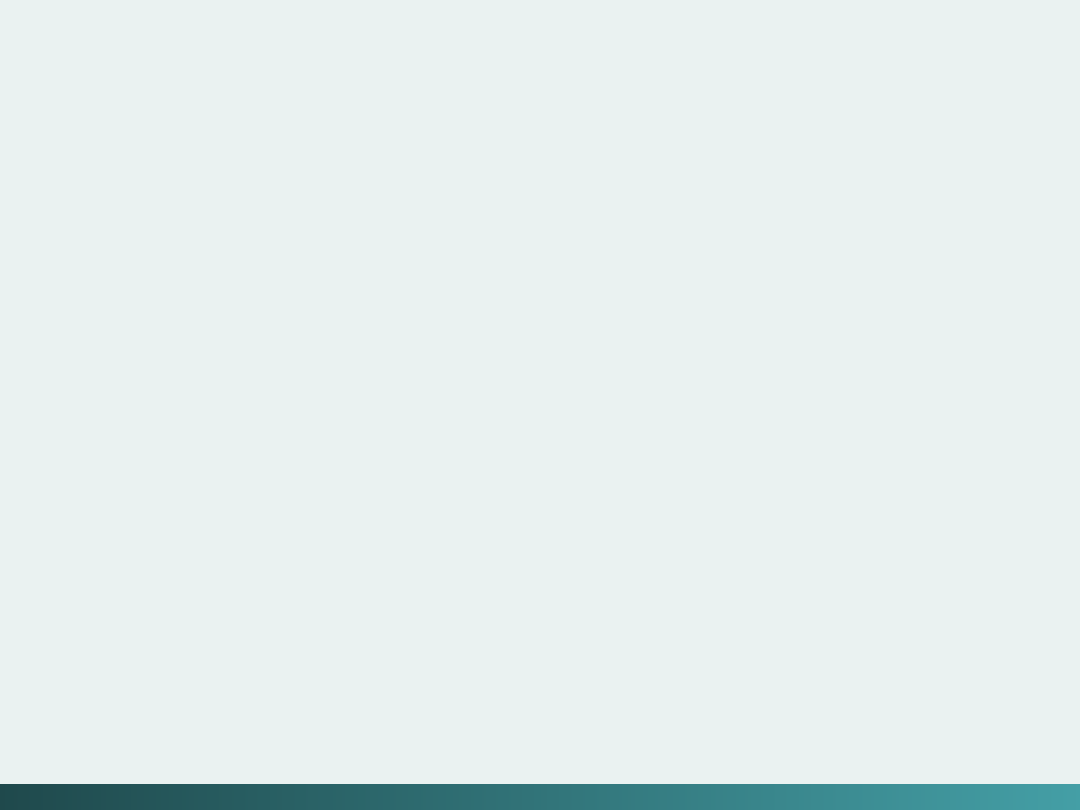
@Janusz Kosiński, 2005
Linie w magistrali
przeznaczone do transferu danych nazywane są
liniami danych.
Linie danych
zawierają aktualną informację, która musi
być przemieszczona z jednej lokalizacji do drugiej.
Linie sterujące
wskazują które urządzenia ma pozwolenie na
wykorzystywanie
magistrali i w jaki sposób (czytanie lub
zapisywanie do / z pamięci czy urządzeń WE / WY). Linie sterujące
również przekazują wiedzę o
wymaganiach, przerwaniach czy
synchronizacji zegarem.
Linie adresowe
wskazują lokalizację (np. w pamięci) gdzie dane
powinny być
zapisane (odczytane)
Linie zasilania
doprowadzają niezbędne zasilanie do obwodów
logicznych.
Każdy typ transferu jest regulowany cyklem pracy zegara – czasem
między dwoma kolejnymi impulsami.
System BUS
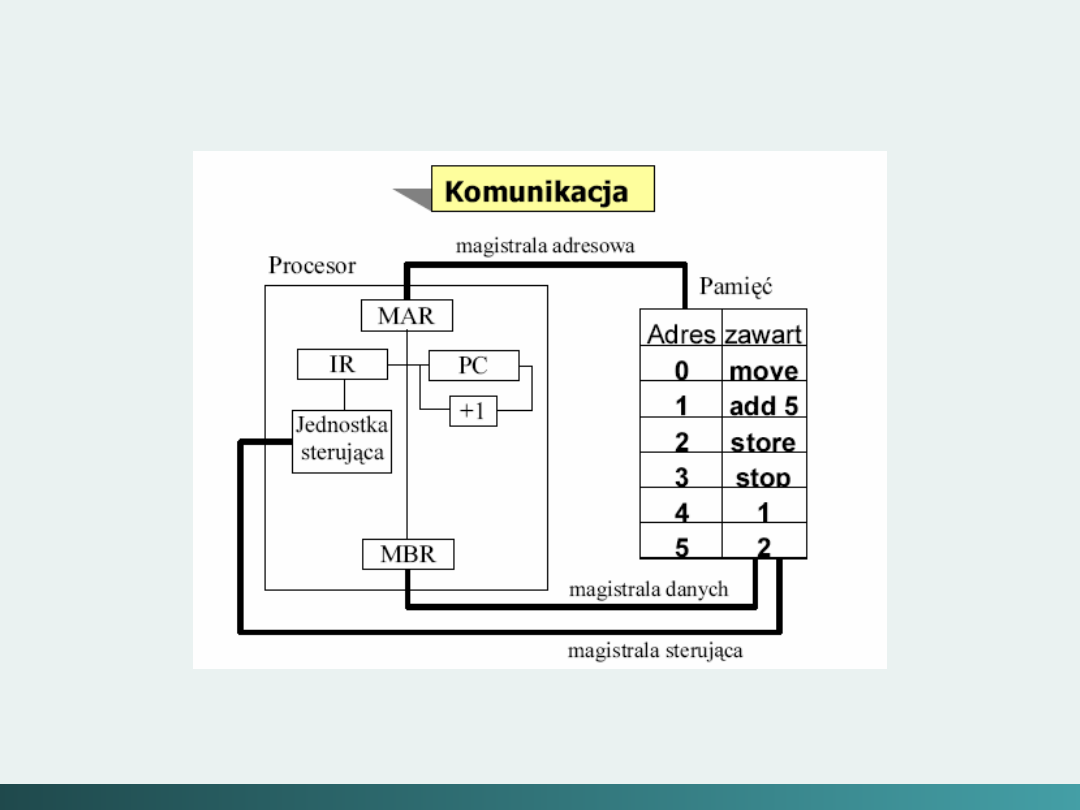
@Janusz Kosiński, 2005
System BUS
@Janusz Kosiński, 2005
System BUS
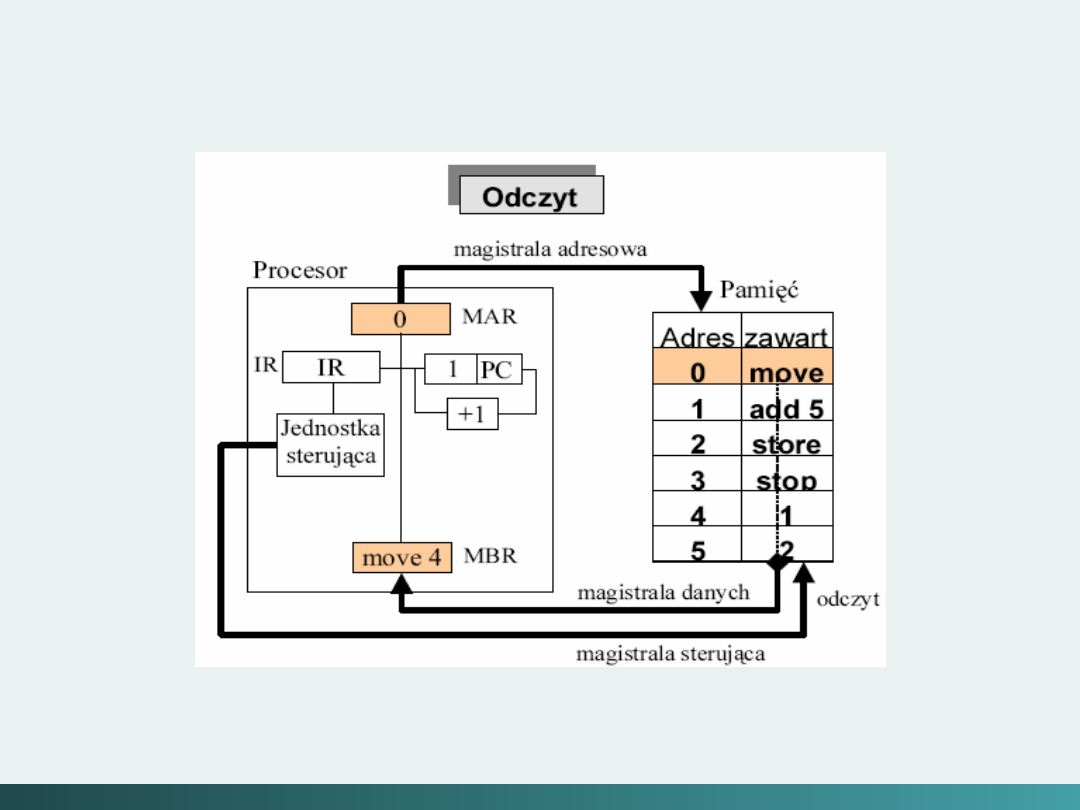
@Janusz Kosiński, 2005
System BUS
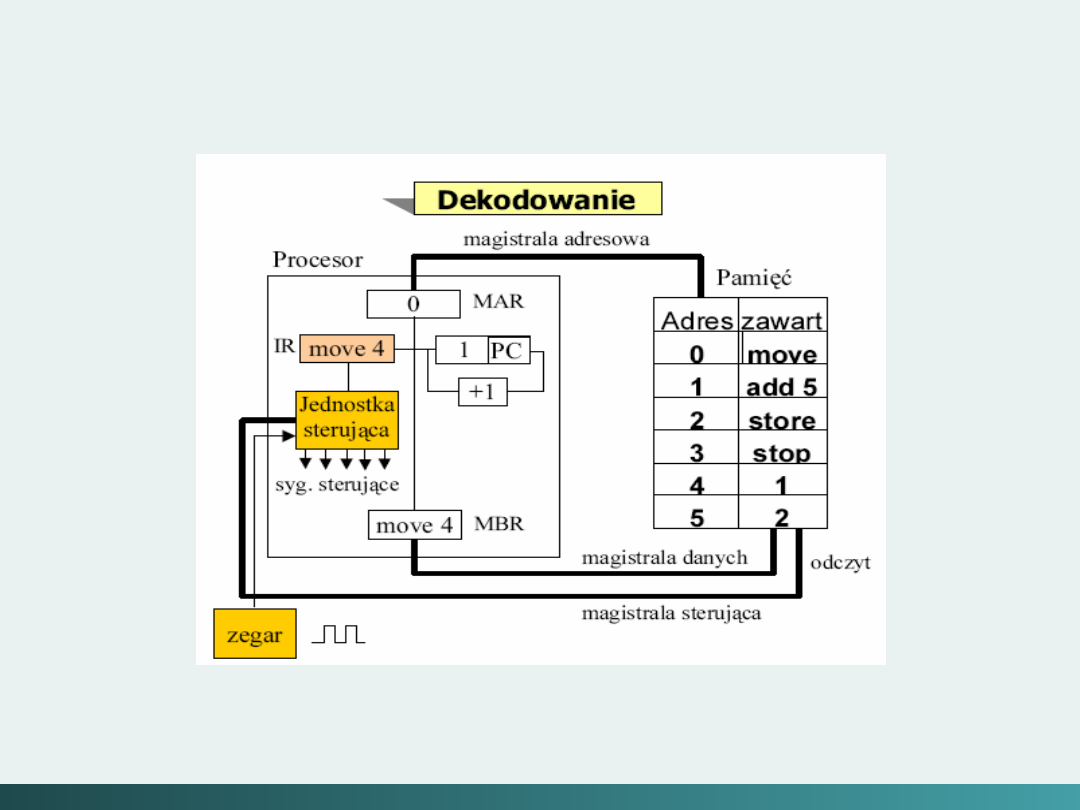
@Janusz Kosiński, 2005
System BUS
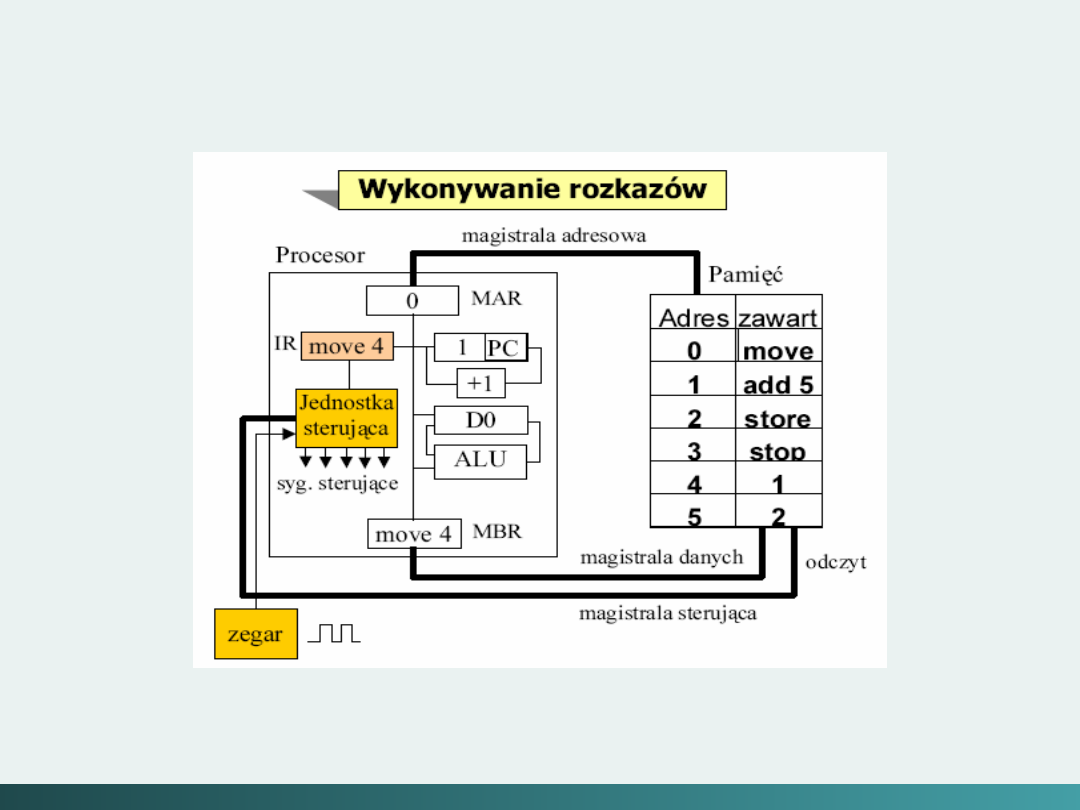
@Janusz Kosiński, 2005
System BUS
@Janusz Kosiński, 2005
Zegary
Każdy komputer zawiera zegar wewnętrzny, regulujący szybkość
wykonywania instrukcji. Zegar również synchronizuje pracę
wszystkich składników systemu.
CPU wykorzystuje zegar do regulowania postępu poszczególnych
procesów,
kontrolując prędkość, nieprzewidywalną w przeciwnym
przypadku,
bramek logicznych.
CPU wymaga określonej liczby „tyknięć” zegara do wykonania każdej
instrukcji.
Stąd wykonywanie instrukcji jest mierzone cyklami
zegara – czasem
pomiędzy dwoma kolejnymi impulsami zegara.
Częstotliwość zegara, jest mierzona w MHz.
Cykl zegara
(okres) jest po prostu odwrotnością częstotliwości – np.
maszyna
800 MHz ma kres równy 1/800 000000 lub 1,25 ns.
Jeżeli maszyna ma okresów 2 ns, to jej częstotliwość wynosi 500 MHz.
Zegary
@Janusz Kosiński, 2005
Większość maszyn jest synchroniczna: główny sygnał zegara
(master clock signal – zegar systemowy), pulsuje (zmieniając się
od 0 do 1 do 0 i tak dalej) w regularnych przedziałach czasu
(interwalach) – rejestry muszą czekać na kolejne „tyknięcia
zegara” zanim będą wprowadzone nowe dane.
Cykl zegara musi być dostatecznie długi aby umożliwić
wprowadzenie tych zmian do następnego zbioru rejestrów. Jeżeli
cykl będzie za krótki, to proces może się zakończyć przed
wprowadzeniem wszystkich instrukcji – to będzie skutkowac w
niestabilnej pracy maszyny.
Stąd minimalny cykl zegara musi być tak duży aby umożliwić
propagację maksymalnej przerwy miedzy rejestrami wejścia i
wyjścia. Np. instrukcja, która powinna wymagać 2 cykli może
potrzebować trzech lub czterech cykli (zależnie od lokalizacji
dodatkowych rejestrów). Większość instrukcji maszynowych
wymaga 1 lub 2 cykli zegara. Poniższa formuła prezentuje relacje
między sekundami a cyklem.
Większość maszyn jest synchroniczna
: główny sygnał zegara
(master clock signal – zegar systemowy), pulsuje (zmieniając się
od 0 do 1 do 0 i tak dalej) w regularnych przedziałach czasu
(interwalach) – rejestry muszą czekać na kolejne „tyknięcia
zegara” zanim będą wprowadzone nowe dane.
Cykl zegara musi być dostatecznie długi
aby umożliwić
wprowadzenie tych zmian do następnego zbioru rejestrów. Jeżeli
cykl będzie za krótki, to proces może się zakończyć przed
wprowadzeniem wszystkich instrukcji – to będzie skutkowac w
niestabilnej pracy maszyny.
Stąd
minimalny cykl zegara
musi być tak duży aby umożliwić
propagację maksymalnej przerwy miedzy rejestrami wejścia i
wyjścia. Np. instrukcja, która powinna wymagać 2 cykli może
potrzebować trzech lub czterech cykli (zależnie od lokalizacji
dodatkowych rejestrów). Większość instrukcji maszynowych
wymaga 1 lub 2 cykli zegara. Poniższa formuła prezentuje relacje
między sekundami a cyklem.
CPU czas =
sekundy
=
instrukcje
x
średni
cykl
x
sekundy
program
program
instrukcja
cykl
Zegary
@Janusz Kosiński, 2005
System I/O
Podsystem Wejścia / Wyjścia
Urządzenia wejścia/wyjścia (I/O) pozwalają na komunikowanie się z
systemem
komputerowym – różne urządzenia peryferyjne.
Te urządzenia nie są bezpośrednio podłączone do CPU. Występuje tu
interfejs
podtrzymujący transfer danych – ten interfejs
przekształca sygnały
magistrali systemowej do formatu
akceptowalnego przez dna urządzenie.
CPU komunikuje się z tymi urządzeniami przez rejestry
wejścia/wyjścia. Tu
wymiana danych jest realizowana na dwa
sposoby.
W odwzorowujących pamięć I/O, rejestry w interfejsie sa
odwzorowywane w
pamięci i nie ma różnicy pomiędzy dostępem do
pamięci czy dostępem do
urządzenia I/O.
W opartych na poleceniach I/O, CPU posiada wyspecjalizowane
instrukcje
przedstawiające wejścia i wyjścia. Aczkolwiek tu nie ma
używania pamięci,
to jest wymagany specyficzny zbiór instrukcji,
które mogą być użytkowane
tylko przez CPU.
Przerwania odgrywają bardzo ważną rolę w układzie I/O, ponieważ
stanowią
efektywny sposób informowania CPU o osiągalnych w
danej chwili
wejściach lub wyjściach.
Podsystem Wejścia / Wyjścia
Urządzenia wejścia/wyjścia
(I/O) pozwalają na komunikowanie się z
systemem
komputerowym – różne urządzenia peryferyjne.
Te urządzenia nie są bezpośrednio podłączone do CPU. Występuje tu
interfejs
podtrzymujący transfer danych – ten interfejs
przekształca sygnały
magistrali systemowej do formatu
akceptowalnego przez dna urządzenie.
CPU komunikuje się z tymi urządzeniami przez
rejestry
wejścia/wyjścia
. Tu
wymiana danych jest realizowana na dwa
sposoby.
W
odwzorowujących pamięć
I/O, rejestry w interfejsie sa
odwzorowywane w
pamięci i nie ma różnicy pomiędzy dostępem do
pamięci czy dostępem do
urządzenia I/O.
W
opartych na poleceniach
I/O, CPU posiada wyspecjalizowane
instrukcje
przedstawiające wejścia i wyjścia. Aczkolwiek tu nie ma
używania pamięci,
to jest wymagany specyficzny zbiór instrukcji,
które mogą być użytkowane
tylko przez CPU.
Przerwania
odgrywają bardzo ważną rolę w układzie I/O, ponieważ
stanowią
efektywny sposób informowania CPU o osiągalnych w
danej chwili
wejściach lub wyjściach.
@Janusz Kosiński, 2005
Pamięć
Organizacja pamięci i adresowanie
Można przedstawić pamięć jako macierz bitów. Każdy wiersz,
wykorzystywany
przez rejestr, posiada długość równoważną do
słowa maszynowego. Każdy
rejestr ma unikatowy adres zazwyczaj
zaczynający się od zera i narastający – adres taki jest zazwyczaj
nieoznaczoną liczbą całkowitą (unsigned integer).
Organizacja pamięci i adresowanie
Można przedstawić pamięć jako macierz bitów. Każdy wiersz,
wykorzystywany
przez rejestr, posiada długość równoważną do
słowa maszynowego. Każdy
rejestr ma unikatowy adres zazwyczaj
zaczynający się od zera i narastający – adres taki jest zazwyczaj
nieoznaczoną liczbą całkowitą (
unsigned integer
).
Adres
8 bitów
Adres
16 bitów
1
1
2
2
3
3
4
4
…
…
N
M
N 8 bitowy
rejestr
M 16 bitowy
rejestr
@Janusz Kosiński, 2005
Przeważnie, pamięć jest adresowana bajtami – każdy bajt ma
swój
unikatowy adres. Niektóre maszyny mogą mieć słowo jako
jednostkę
adresową. Np. komputer może operować 32 bitowymi
słowami
(manipuluje cały czas 32 bitami w dowolnych
instrukcjach), ale stale wykorzystuje architekturę adresowaną
bajtami.
W sytuacji, kiedy słowo używa wielu bajtów, bajt z najniższym
adresem
determinuje adres kompletnego słowa.
Jest również możliwe adresowanie słowami – każde słowo (nie jest
niezbędny każdy bajt) posiada swój własny adres, ale
większość
współczesnych maszyn posiada adresowanie oparte
na bajtach (nawet
jeżeli słowa są dłuższe niż 32 bity).
Adres w pamięci, jest przechowywany (typowo) w pojedynczym
słowie maszynowym.
Przeważnie,
pamięć jest adresowana bajtami
– każdy bajt ma
swój
unikatowy adres. Niektóre maszyny mogą mieć słowo jako
jednostkę
adresową. Np. komputer może operować 32 bitowymi
słowami
(manipuluje cały czas 32 bitami w dowolnych
instrukcjach), ale stale wykorzystuje architekturę adresowaną
bajtami.
W sytuacji, kiedy słowo używa wielu bajtów,
bajt z najniższym
adresem
determinuje adres kompletnego słowa.
Jest również możliwe
adresowanie słowami
– każde słowo (nie jest
niezbędny każdy bajt) posiada swój własny adres, ale
większość
współczesnych maszyn posiada adresowanie oparte
na bajtach (nawet
jeżeli słowa są dłuższe niż 32 bity).
Adres w pamięci, jest przechowywany (typowo) w pojedynczym
słowie maszynowym.
Pamięć
@Janusz Kosiński, 2005
Pamięć jest podobna do ulicy pełnej budynków mieszkalnych. Każdy
budynek (słowo) posiada wiele mieszkań (bajtów), zaś każde
mieszkanie ma swój adres. Wszystkie mieszkania są adresowane
kolejno, od 0 do całkowitej liczby mieszkań w tym kompleksie
mieszkalnym.
Budynki obsługują grupę mieszkań – w komputerze słowa robią
dokładnie to samo. Słowa są podstawową jednostką stosowaną w
różnych instrukcjach.
Jeżeli architektura jest adresowana bajtami, oraz słowo
ustalające architekturę instrukcji jest dłuższe niż 1 bajt, musi być
zaadresowane „wyrównanie”. Np. jeżeli chcemy przeczytać słowo
32 bitowe w maszynie adresowanej bajtami, to musimy być pewni,
że:
1. Słowo zostało zmagazynowane w naturalnych granicach
2. Dostęp do słowa rozpoczyna się w tych granicach.
Jest to spełnione w przypadku 32 bitowego słowa, przy zastosowaniu
adresu będącego wielokrotnością 4.
Pamięć jest podobna do ulicy pełnej budynków mieszkalnych. Każdy
budynek (słowo) posiada wiele mieszkań (bajtów), zaś każde
mieszkanie ma swój adres. Wszystkie mieszkania są adresowane
kolejno, od 0 do całkowitej liczby mieszkań w tym kompleksie
mieszkalnym.
Budynki obsługują grupę mieszkań – w komputerze słowa robią
dokładnie to samo. Słowa są podstawową jednostką stosowaną w
różnych instrukcjach.
Jeżeli architektura jest adresowana bajtami, oraz słowo
ustalające architekturę instrukcji jest dłuższe niż 1 bajt, musi być
zaadresowane „wyrównanie”. Np. jeżeli chcemy przeczytać słowo
32 bitowe w maszynie adresowanej bajtami, to musimy być pewni,
że:
1. Słowo zostało zmagazynowane w naturalnych granicach
2. Dostęp do słowa rozpoczyna się w tych granicach.
Jest to spełnione w przypadku 32 bitowego słowa, przy zastosowaniu
adresu będącego wielokrotnością 4.
Pamięć
@Janusz Kosiński, 2005
Pamięć jest zbudowana z chipów RAM (random access memory ).
Pamięć jest opisywana, bardzo często, przy pomocy notacji L x W
(length x width = długość x szerokość).
Np., 4M x 16 oznacza, że pamięć ma 4M długości (4M = 2
2
x 2
20
= 2
22
słowa) i
16 bitów szerokości (każde słowo ma 16 bitów).
Szerokość (druga liczba w notacji) reprezentuje rozmiar słowa.
W celu zaadresowania tej pamięci (zakładając adresowanie słowami),
potrzebujemy unikatowej identyfikacji 2
12
różnych jednostek, co oznacza
konieczność
posiadania 2
12
różnych adresów.
Ponieważ adresowanie jest dokonywane przy pomocy
nieoznaczonych
liczb binarnych, potrzebujemy odliczania od 0
do (2
12
– 1) w systemie
Aby liczyć od 0 do 3 w systemie binarnym (dla całkowitej liczby 4
pozycji)
potrzebujemy 2 bity.
Dla liczenia od 0 do 7 w systemie binarnym (dla 8 pozycji),
potrzebujemy 3 bity.
Dla liczenia od 0 to 15 w systemie binarnym (dla 16 pozycji) - 4 bity.
Pamięć jest zbudowana z chipów RAM (random access memory ).
Pamięć jest opisywana, bardzo często, przy pomocy
notacji L x W
(length x width = długość x szerokość).
Np., 4M x 16 oznacza, że pamięć ma 4M długości (4M = 2
2
x 2
20
= 2
22
słowa) i
16 bitów szerokości (każde słowo ma 16 bitów).
Szerokość (druga liczba w notacji) reprezentuje rozmiar słowa.
W celu zaadresowania tej pamięci (zakładając adresowanie słowami),
potrzebujemy unikatowej identyfikacji 2
12
różnych jednostek, co oznacza
konieczność
posiadania 2
12
różnych adresów.
Ponieważ adresowanie jest dokonywane przy pomocy
nieoznaczonych
liczb binarnych, potrzebujemy odliczania od 0
do (2
12
– 1) w systemie
Aby liczyć od 0 do 3 w systemie binarnym (dla całkowitej liczby 4
pozycji)
potrzebujemy 2 bity.
Dla liczenia od 0 do 7 w systemie binarnym (dla 8 pozycji),
potrzebujemy 3 bity.
Dla liczenia od 0 to 15 w systemie binarnym (dla 16 pozycji) - 4 bity.
Pamięć
@Janusz Kosiński, 2005
Pamięć główna jest zazwyczaj większa niż jeden chip RAM. Jako konsekwencja
tego,
chipy są kombinowane w pojedyncze moduły pamięci, spełniające
wymagania
rozmiaru. Np. budowa pamięci 32K x 16 przy pomocy chipów
RAM 2K x 8 –
należy połączyć 16 wierszy i 2 kolumny chipów razem.
Wiersz 0
Wiersz 0
2K x 8
2K x 8
2K x 8
2K x 8
Wiersz 1
Wiersz 1
2K x 8
2K x 8
2K x 8
2K x 8
. . .
. . .
. . .
. . .
. . .
. . .
Wiersz
Wiersz
15
15
2K x 8
2K x 8
2K x 8
2K x 8
Każdy wiersz adresuje 2K słów (zakładamy że maszyna jest adresowana
słowami), ale wymaga, dwóch chipów dla operowania pełną szerokością. Adresy
dla tej pamięci muszą mieć 15 bitów (32K = 2
5
x 2
10
dostępnych słów). Każda
para chipów (każdy wiersz) wymaga tylko 11 linii adresowych (każda para
chipów podtrzymuje tylko 2
11
słów ).
W tej sytuacji potrzebny będzie dekoder, do dekodowania 4 bitów z lewej
strony, aby zdeterminować, która para chipów podtrzymuje pożądany adres.
Jak właściwa para chipów jest zlokalizowana, to pozostałe 11 bitów jest
wprowadzane do następnego dekodera, celem znalezienia dokładnego adresu
wewnątrz tej pary.
Każdy wiersz adresuje 2K słów (zakładamy że maszyna jest adresowana
słowami), ale wymaga, dwóch chipów dla operowania pełną szerokością. Adresy
dla tej pamięci muszą mieć 15 bitów (32K = 2
5
x 2
10
dostępnych słów). Każda
para chipów (każdy wiersz) wymaga tylko 11 linii adresowych (każda para
chipów podtrzymuje tylko 2
11
słów ).
W tej sytuacji potrzebny będzie dekoder, do dekodowania 4 bitów z lewej
strony, aby zdeterminować, która para chipów podtrzymuje pożądany adres.
Jak właściwa para chipów jest zlokalizowana, to pozostałe 11 bitów jest
wprowadzane do następnego dekodera, celem znalezienia dokładnego adresu
wewnątrz tej pary.
Pamięć
@Janusz Kosiński, 2005
Pojedynczy moduł pamięci współdzielonej jest przyczyną
kolejkowania dostępu. Do ulżenia tej sytuacji jest stosowane
przeplatanie pamięci, powodujące podział pamięci między liczne
moduły pamięci (banki pamięci).
Mniej znaczące przeplatanie (low order interleaving) wykorzystuje
mniej znaczące bity adresów są wykorzystywane do selekcji banków –
dla bardziej znaczących przeplotów (high order interleaving)
wykorzystywane są bity bardziej znaczące.
W przeplocie wysokiego porządku (high order interleaving), każdy
moduł zawiera następujące po sobie adresy.
Pojedynczy moduł pamięci współdzielonej jest przyczyną
kolejkowania dostępu. Do ulżenia tej sytuacji jest stosowane
przeplatanie pamięci
, powodujące podział pamięci między liczne
moduły pamięci (banki pamięci).
Mniej znaczące przeplatanie
(low order interleaving)
wykorzystuje
mniej znaczące bity adresów są wykorzystywane do selekcji banków –
dla bardziej znaczących przeplotów
(high order interleaving)
wykorzystywane są bity bardziej znaczące.
W przeplocie wysokiego porządku (high order interleaving),
każdy
moduł zawiera następujące po sobie adresy.
Moduł
1
Moduł
2
Moduł
3
Moduł
4
Moduł
5
Moduł
6
Moduł
7
Moduł
8
0
4
8
12
16
20
24
28
1
5
9
13
17
21
25
29
2
6
10
14
18
22
26
30
3
7
11
15
19
23
27
31
Pamięć
@Janusz Kosiński, 2005
Moduł
1
Moduł
2
Moduł
3
Moduł
4
Moduł
5
Moduł
6
Moduł
7
Moduł
8
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
W przeplocie niskiego porządku (low order interleaving) kolejne słowa
są umieszczane w pamięci w różnych modułach.
Jeżeli odpowiednie magistrale będą używać przeplotu niskiego
porządku, czytanie lub zapisywanie w jednym module może rozpocząć
się przed skompletowaniem aktualnego odczytu lub zapisu
(nakładanie się operacji – overlapping).
W przeplocie niskiego porządku (
low order interleaving
) kolejne słowa
są umieszczane w pamięci w różnych modułach.
Jeżeli odpowiednie magistrale będą używać przeplotu niskiego
porządku,
czytanie lub zapisywanie w jednym module może rozpocząć
się przed skompletowaniem aktualnego odczytu lub zapisu
(nakładanie się operacji –
overlapping
).
Pamięć
@Janusz Kosiński, 2005
Przerwania
Przerwania
Przerwania są zdarzeniami modyfikującymi (lub przerywającymi)
normalny tok wykonywania instrukcji w systemie. Przerwania mogą być
wyzwalane z różnych przyczyn, włączywszy:
Wymagania I/O
Błędy arytmetyczne (np. dzielenie przez zero)
Arytmetyczne przepełnienie lub niedomiar
Złe funkcjonowanie sprzętu (np. bład parzystości pamięci)
Punkty przerwań zdefiniowane przez użytkownika (eliminowanie
błędów programu)
Błędy stron
Niepoprawne instrukcje (wyniki złego zastosowania odwołań i
wskaźników)
Różne
Przerwania
Przerwania są zdarzeniami modyfikującymi
(lub przerywającymi)
normalny tok wykonywania instrukcji w systemie. Przerwania mogą być
wyzwalane z różnych przyczyn, włączywszy:
Wymagania I/O
Błędy arytmetyczne (np. dzielenie przez zero)
Arytmetyczne przepełnienie lub niedomiar
Złe funkcjonowanie sprzętu (np. bład parzystości pamięci)
Punkty przerwań zdefiniowane przez użytkownika (eliminowanie
błędów programu)
Błędy stron
Niepoprawne instrukcje (wyniki złego zastosowania odwołań i
wskaźników)
Różne
@Janusz Kosiński, 2005
Czynności podejmowane dla każdego typu przerwań - obsługa
przerwań - są bardzo różne.
Czym innym jest informowanie CPU, że właśnie zostało zakończone
żądanie I/O, a czym innym kończenie programu z powodu dzielenia przez
zero.
Wszystkie muszą być obsługiwane, ponieważ powodują zmiany w
normalnym toku działania programu.
Przerwanie może być:
inicjowane przez użytkownika lub przez system,
maskowane (wyłączone lub ignorowane) lub nie maskowane
(przerwanie
wysokiego priorytetu nie może być maskowane),
może wydarzyć się wewnątrz lub między instrukcjami,
może być synchroniczne (realizowane w tym samym miejscu
wykonywania programu) lub asynchroniczne (wydarzające się
nieoczekiwanie),
przyczynić się do zakończenia działania programu lub dalszej realizacji
- jeżeli istnieje obsługa przerwań.
Czynności podejmowane dla każdego typu przerwań - obsługa
przerwań - są bardzo różne.
Czym innym jest informowanie CPU, że właśnie zostało zakończone
żądanie I/O, a czym innym kończenie programu z powodu dzielenia przez
zero.
Wszystkie muszą być obsługiwane, ponieważ powodują zmiany w
normalnym toku działania programu.
Przerwanie może być:
inicjowane przez użytkownika lub przez system,
maskowane (wyłączone lub ignorowane) lub nie maskowane
(przerwanie
wysokiego priorytetu nie może być maskowane),
może wydarzyć się wewnątrz lub między instrukcjami,
może być synchroniczne (realizowane w tym samym miejscu
wykonywania programu) lub asynchroniczne (wydarzające się
nieoczekiwanie),
przyczynić się do zakończenia działania programu lub dalszej realizacji
- jeżeli istnieje obsługa przerwań.
Przerwania
@Janusz Kosiński, 2005
Przykład prostej architektury zawierającej pamięć (do przechowywania
programów i danych) i CPU (zawierającej ALU i kilka rejestrów) oraz wszystkich
niezbędnych składników aby być prostym komputerem:
Binarny, dopełniający do dwóch
Program magazynowany, słowo stałej długości
Adresowanie słowami (ale nie bajtami)
4K słowa pamięci głównej (to powoduje 12 bitów na adres)
16 bitowe dane (słowa mają 16 bitów)
16 bitowe instrukcje, 4 dla kodu operacji i 12 dla adresu
16 bitowy akumulator (AC)
16 bitowy rejestr instrukcji (IR)
16 bitowy rejestr buforów pamięci (MBR)
12 bitowy licznik programu (PC)
12 bitowy rejestr adresów pamięci (MAR)
8 bitowy rejestr wejścia
8 bitowy rejestr wyjścia
Przykład prostej architektury zawierającej pamięć (do przechowywania
programów i danych) i CPU (zawierającej ALU i kilka rejestrów) oraz wszystkich
niezbędnych składników aby być prostym komputerem:
Binarny
, dopełniający do dwóch
Program magazynowany, słowo
stałej długości
Adresowanie słowami
(ale nie bajtami)
4K
słowa pamięci głównej (to powoduje 12 bitów na adres)
16 bitowe
dane (słowa mają 16 bitów)
16 bitowe
instrukcje, 4 dla kodu operacji i 12 dla adresu
16 bitowy
akumulator (AC)
16 bitowy
rejestr instrukcji (IR)
16 bitowy
rejestr buforów pamięci (MBR)
12 bitowy
licznik programu (PC)
12 bitowy
rejestr adresów pamięci (MAR)
8 bitowy
rejestr wejścia
8 bitowy
rejestr wyjścia
Prosty
komputer
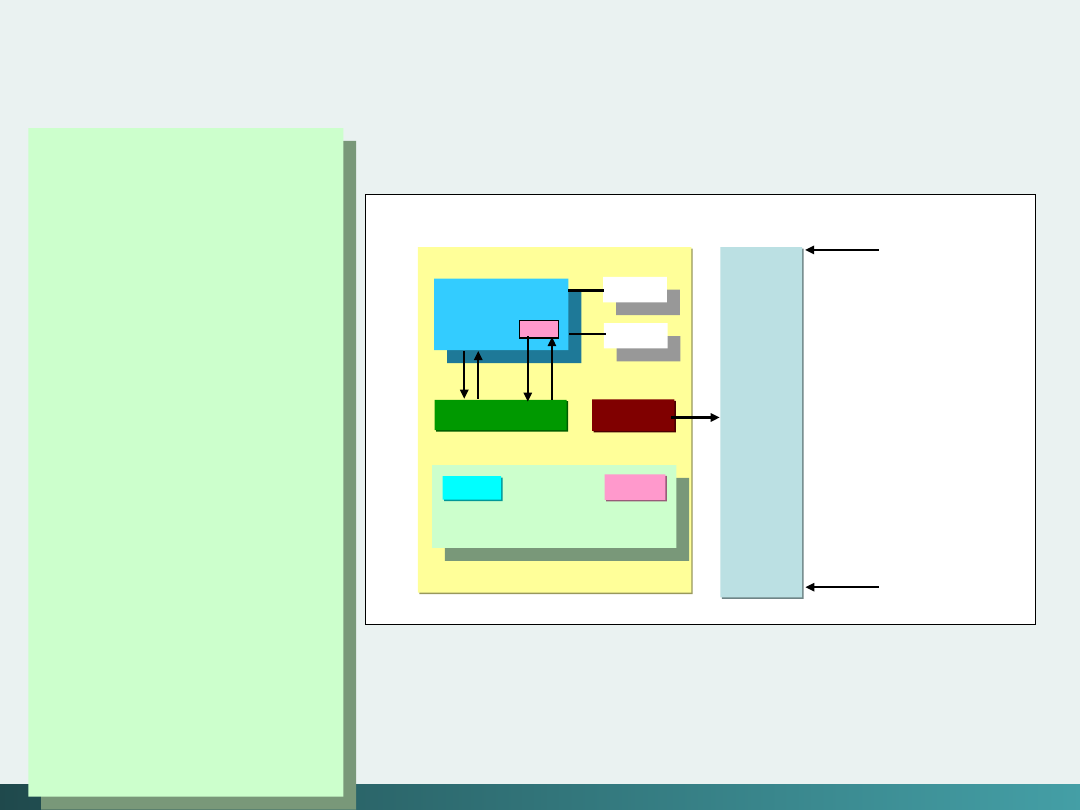
@Janusz Kosiński, 2005
Prosty
komputer
CPU
CPU
MBR
MBR
MAR
MAR
InREG
InREG
OutREG
OutREG
Jednostka kontrolna
Jednostka kontrolna
ALU
ALU
PC
PC
IR
IR
AC
Pamięć
główna
Pamięć
główna
Adres pamięci 4K
- 1
Adres pamięci 0
AC: akumulator - rejestr
ogólnego stosowania,
utrzymuje dane wymagane
przez CPU.
MAR: rejestr adresów
pamięci.
MBR: rejestr buforów
pamięci – utrzymuje dane
właśnie czytane lub gotowe
do zapisu.
PC: licznik programu –
utrzymuje adresy kolejnych
(następujących po sobie)
instrukcji.
IR: rejestr instrukcji –
utrzymuje kolejne
instrukcje.
InREG: rejestr wejścia –
dane z urządzenia
wejściowego.
OutREG: rejestr wyjścia –
dane dla urządzenia
wyjściowego.
AC: akumulator - rejestr
ogólnego stosowania,
utrzymuje dane wymagane
przez CPU.
MAR: rejestr adresów
pamięci.
MBR: rejestr buforów
pamięci – utrzymuje dane
właśnie czytane lub gotowe
do zapisu.
PC: licznik programu –
utrzymuje adresy kolejnych
(następujących po sobie)
instrukcji.
IR: rejestr instrukcji –
utrzymuje kolejne
instrukcje.
InREG: rejestr wejścia –
dane z urządzenia
wejściowego.
OutREG: rejestr wyjścia –
dane dla urządzenia
wyjściowego.
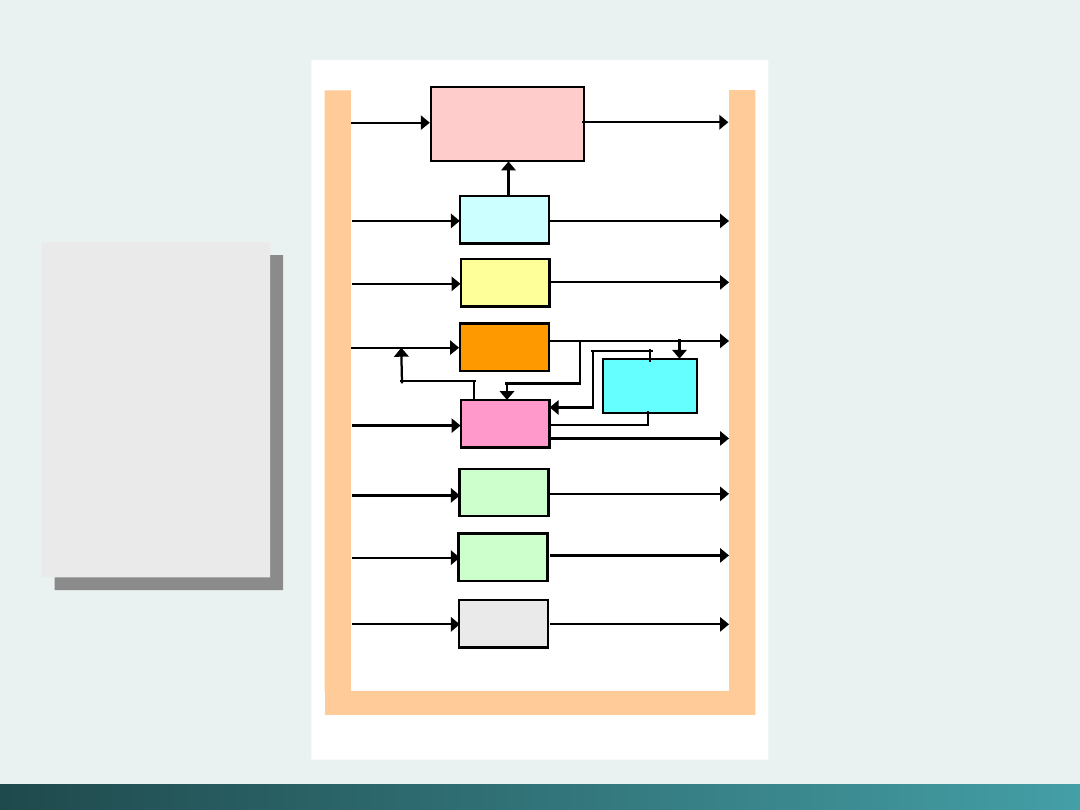
@Janusz Kosiński, 2005
Każde
urządzenie
podłączone do
magistrali
posiada swój
numer,
umożliwiający
prawidłową
realizację
procesów.
Każde
urządzenie
podłączone do
magistrali
posiada swój
numer,
umożliwiający
prawidłową
realizację
procesów.
Prosty
komputer
MAR
PC
MBR
AC
InREG
OutREG
IR
ALU
Pamięć
Główna
1
2
3
4
5
6
7
0
BUS 16 bitowy
Ścieżka danych w prostym
komputerze
@Janusz Kosiński, 2005
Architektura zbioru instrukcji
Architektura zbioru instrukcji (
instruction set architecture - ISA
) dla
maszyny specyfikuje instrukcje, które komputer powinien wykonać oraz
ich format.
ISA jest zasadniczo interfejsem miedzy oprogramowaniem i sprzętem.
W przykładowym komputerze, każda instrukcja zawiera 16 bitów. Bity
najwyższe, od 12 do 15, tworzą kod operacji, specyfikujący instrukcje
wykonawcze – co pozwala na wykonanie wszystkich 16 instrukcji.
Najniższe bity, od 0 do 11 tworzą adres, pozwalający na maksymalny
rozmiar pamięci: 2
12
- 1.
Prosty
komputer
Adres
Kod
operacji
Bit 15 12 11
0
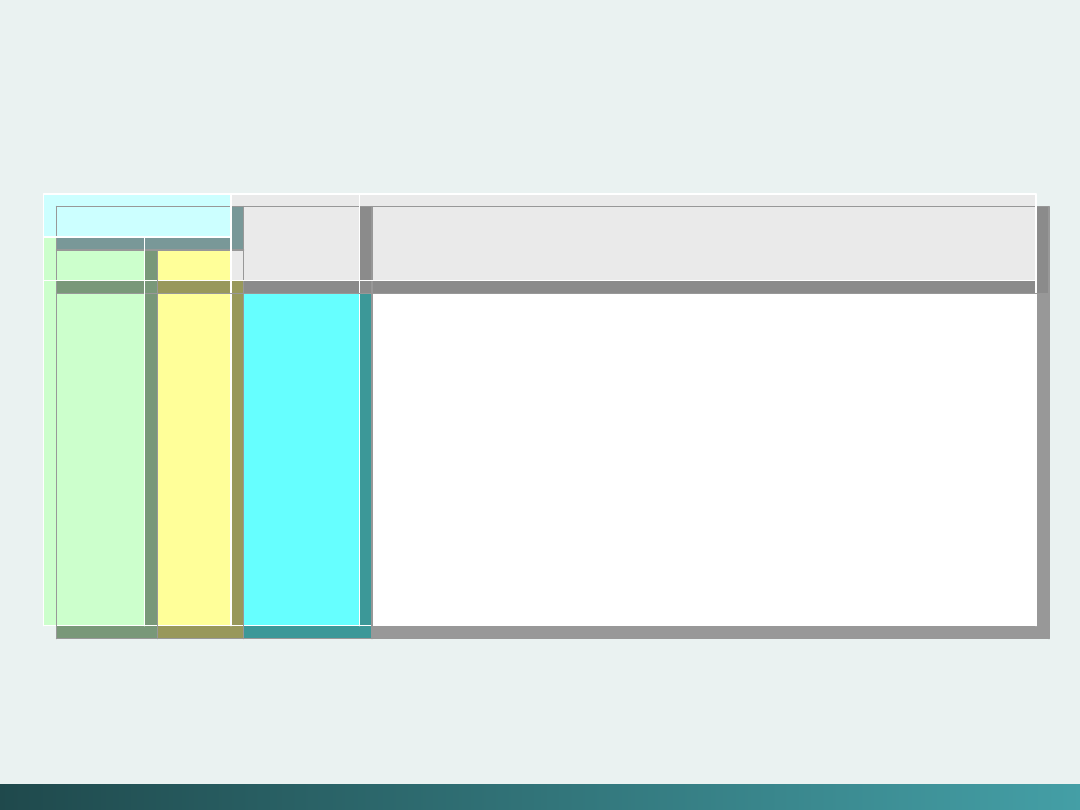
@Janusz Kosiński, 2005
Pobierz zawartość adresu X do AC
Przechowaj zawartość AC pod adresem X
Dodaj zawartość adresu X do AC i przechowaj wynik w AC
Odejmij zawartość adresu X od AC i przechowaj wynik w AC
Wprowadź wartość z klawiatury do AC
Wyprowadź wartość z AC na wyświetlacz
Zakończ program.
Opuść następną instrukcję w przypadku warunku.
Wprowadź wartość X do PC
Pobierz zawartość adresu X do AC
Przechowaj zawartość AC pod adresem X
Dodaj zawartość adresu X do AC i przechowaj wynik w AC
Odejmij zawartość adresu X od AC i przechowaj wynik w AC
Wprowadź wartość z klawiatury do AC
Wyprowadź wartość z AC na wyświetlacz
Zakończ program.
Opuść następną instrukcję w przypadku warunku.
Wprowadź wartość X do PC
Load X
Store X
Add X
Subt X
Input
Output
Halt
Skipcond
Jump X
Load X
Store X
Add X
Subt X
Input
Output
Halt
Skipcond
Jump X
1
2
3
4
5
6
7
8
9
1
2
3
4
5
6
7
8
9
0001
0010
0011
0100
0101
0110
0111
1000
1001
0001
0010
0011
0100
0101
0110
0111
1000
1001
Hex
Hex
Bin
Bin
Znaczenie
Znaczenie
Instrukcja
Instrukcja
Numer instrukcji
Numer instrukcji
Prosty
komputer
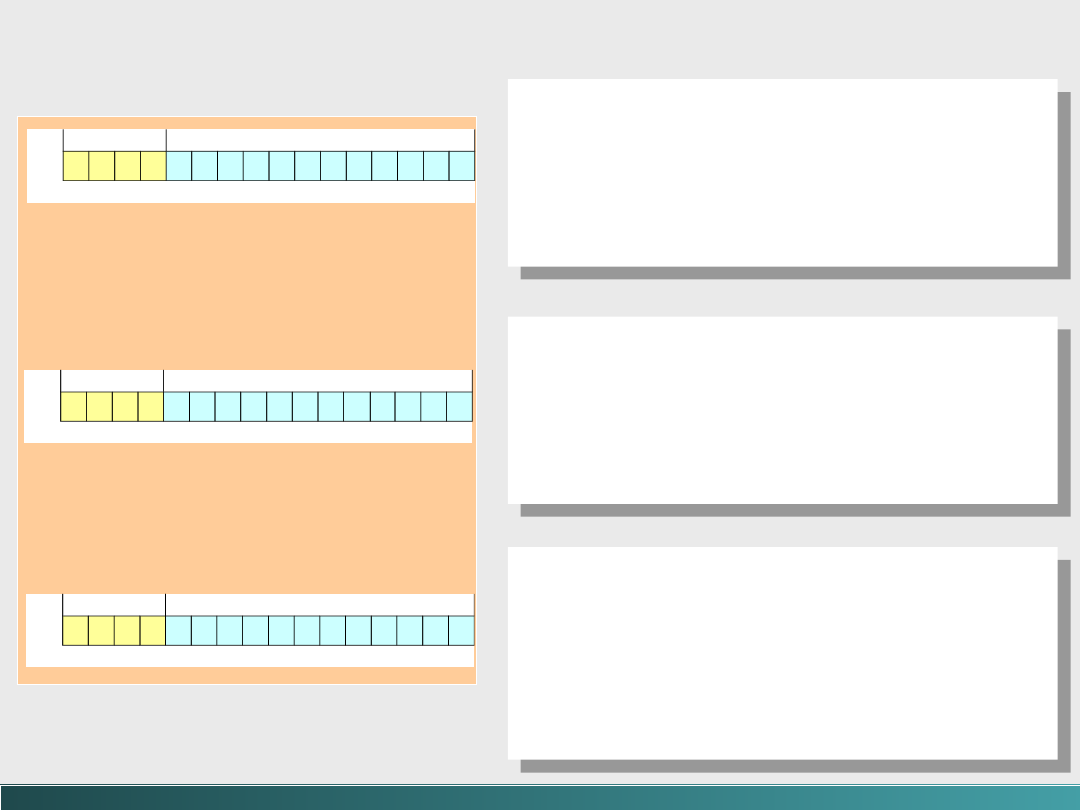
@Janusz Kosiński, 2005
Prosty
komputer
Kod operacji
adres
0 0 0 1 0 0 0 0 0 0 0 0 0 0 1 1
bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Kod operacji
adres
0 0 1 1 0 0 0 0 0 0 0 0 1 1 0 1
bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Kod operacji
adres
1 0 0 0 1 0 0 0 0 0 0 0 0 0 1 1
bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Kod operacji 0001 oznacza w układzie
binarnym pozycję 1, reprezentującą instrukcję
Load. Pozostałe 12 bitów wskazuje adres w
pamięci głównej dla wartości pobieranej (numer
3). Instrukcja ta powoduje skopiowanie do AC
wartości znalezionej w pamięci głównej pod
adresem 3.
Kod operacji 0001
oznacza w układzie
binarnym pozycję 1, reprezentującą instrukcję
Load. Pozostałe 12 bitów wskazuje adres w
pamięci głównej dla wartości pobieranej (numer
3). Instrukcja ta powoduje
skopiowanie do AC
wartości znalezionej w pamięci głównej pod
adresem 3.
Kod operacji 0011 oznacza w układzie
binarnym pozycję 3, reprezentującą instrukcję
Add. Pozostałe 12 bitów wskazuje adres w
pamięci głównej dla wartości pobieranej (numer
13 lub 00D w Hex). Instrukcja ta powoduje
dodanie do AC wartości znalezionej w
pamięci głównej pod adresem 13.
Kod operacji 0011
oznacza w układzie
binarnym pozycję 3, reprezentującą instrukcję
Add. Pozostałe 12 bitów wskazuje adres w
pamięci głównej dla wartości pobieranej (numer
13 lub 00D w Hex). Instrukcja ta powoduje
dodanie do AC wartości znalezionej w
pamięci głównej pod adresem 13.
Kod operacji 1000 oznacza w układzie
binarnym pozycję 8, reprezentującą instrukcję
Skipcond. Bity jedenasty i dziesiąty w adresie
wskazują binarnie 10 (dziesiętnie 2). Jeżeli AC
jest mniejsze od 0, to następuje pominięcie i
przejście do następnej instrukcji. Jeżeli AC jest
większe lub równe 0, to instrukcja ta powoduje
zwiększenie wartości PC o 1.
Kod operacji 1000
oznacza w układzie
binarnym pozycję 8, reprezentującą instrukcję
Skipcond. Bity jedenasty i dziesiąty w adresie
wskazują binarnie 10 (dziesiętnie 2). Jeżeli
AC
jest mniejsze od 0, to następuje pominięcie
i
przejście do następnej instrukcji.
Jeżeli AC jest
większe lub równe 0,
to instrukcja ta powoduje
zwiększenie wartości PC o 1.
@Janusz Kosiński, 2005
Register Transfer Notation
Notacja symboliczna stosowana do opisywania zachowań w
mikrooperacjach jest nazywana register transfer notation (RTN) lub
register transfer language (RTL).
W notacji tej używamy zapisu M[X] do wskazania aktualnej danej,
magazynowanej na pozycji (pod adresem) X, oraz do wskazania
transferu informacji.
W rzeczywistości, transfer z jednego rejestru do drugiego jest
dokonywany zawsze za pomocą magistrali (za jej pośrednictwem).
Register Transfer Notation
Notacja symboliczna stosowana do opisywania zachowań w
mikrooperacjach jest nazywana register transfer notation (RTN) lub
register transfer language (RTL).
W notacji tej używamy zapisu
M[X]
do wskazania aktualnej danej,
magazynowanej na pozycji (pod adresem) X, oraz
do wskazania
transferu informacji.
W rzeczywistości, transfer z jednego rejestru do drugiego jest
dokonywany zawsze za pomocą magistrali (za jej pośrednictwem).
Prosty
komputer
@Janusz Kosiński, 2005
Load X
Instrukcja ta pobiera zawartość pamięci z lokalizacji X d oAC – oczywiście
adres musi być najpierw umieszczony w MAR. Wtedy dana z położenia
M[MAR] jest przemieszczana do MBR a dopiero potem do AC.
MAR X
MBR M[MAR], AC MBR
Ponieważ IR musi używać magistrali do kopiowania wartości X do MAR,
zanim dana z lokalizacji X będzie umieszczona w MBR – ta operacja
wymaga dwóch cykli magistrali. Stąd te dwie operacje są na oddzielonych
liniach – nie mogą się pojawić podczas tego samego cyklu.
Store X
Ta instrukcja przechowuje zawartość AC w pamięci na pozycji X:
MAR X, MBR AC
M[MAR] MBR
Load X
Instrukcja ta pobiera zawartość pamięci z lokalizacji X d oAC – oczywiście
adres musi być najpierw umieszczony w MAR. Wtedy dana z położenia
M[MAR] jest przemieszczana do MBR a dopiero potem do AC.
MAR X
MBR M[MAR], AC MBR
Ponieważ IR musi używać magistrali do kopiowania wartości X do MAR,
zanim dana z lokalizacji X będzie umieszczona w MBR – ta operacja
wymaga dwóch cykli magistrali. Stąd te dwie operacje są na oddzielonych
liniach – nie mogą się pojawić podczas tego samego cyklu.
Store X
Ta instrukcja przechowuje zawartość AC w pamięci na pozycji X:
MAR X, MBR AC
M[MAR] MBR
Prosty
komputer
@Janusz Kosiński, 2005
Add X
Wartość danej przechowywana pod adresem X jest dodawana do AC :
MAR X
MBR M[MAR]
AC AC + MBR
Subt X
Podobnie do Add, ta instrukcja odejmuje wartość przechowaną pod
adresem X z akumulatora i umieszcza wynik z powrotem w AC:
MAR X
MBR M[MAR]
AC AC – MBR
Add X
Wartość danej przechowywana pod adresem X jest dodawana do AC :
MAR X
MBR M[MAR]
AC AC + MBR
Subt X
Podobnie do Add, ta instrukcja odejmuje wartość przechowaną pod
adresem X z akumulatora i umieszcza wynik z powrotem w AC:
MAR X
MBR M[MAR]
AC AC – MBR
Prosty
komputer
@Janusz Kosiński, 2005
Input
Każde wejście z urządzenia wejściowego jest najpierw kierowane do
InREG. Potem dana jest transferowana do AC.
AC
InREG
Output
Zawartość AC jest umieszczana w OutREG, skąd może być przesłana do
urządzenia wyjściowego:
OutREG AC
Halt
Maszyna przerywa wykonywanie działania.
Input
Każde wejście z urządzenia wejściowego jest najpierw kierowane do
InREG. Potem dana jest transferowana do AC.
AC
InREG
Output
Zawartość AC jest umieszczana w OutREG, skąd może być przesłana do
urządzenia wyjściowego:
OutREG AC
Halt
Maszyna przerywa wykonywanie działania.
Prosty
komputer
@Janusz Kosiński, 2005
Skipcond
if IR[11-10] = 00 then {jeżeli bity 10 i 11 w IR są oba równe 0}
If AC < 0 then PC PC+1
else If IR[11-10] = 01 then {jeżeli bit 11 = 0 i bit 10 = 1}
If AC = 0 then PC PC + 1
else If IR[11-10] = 10 then {jeżeli bit 11 = 1 i bit 10 = 0}
If AC > 0 then PC PC + 1
Jeżeli oba bity w pozycji dziesięć i jedenaście są równe jedności, to
powstają warunki sygnalizowania błędu.
Skipcond
if
IR[11-10] = 00 then
{jeżeli bity 10 i 11 w IR są oba równe 0}
If
AC < 0
then
PC PC+1
else If
IR[11-10] = 01
then
{jeżeli bit 11 = 0 i bit 10 = 1}
If
AC = 0
then
PC PC + 1
else If
IR[11-10] = 10
then
{jeżeli bit 11 = 1 i bit 10 = 0}
If
AC > 0
then
PC PC + 1
Jeżeli oba bity w pozycji dziesięć i jedenaście są równe jedności, to
powstają warunki sygnalizowania błędu.
Prosty
komputer
@Janusz Kosiński, 2005
Jump X
Ta instrukcja jest powodem bezwarunkowego przejścia pod dany adres, X.
do wykonania tej instrukcji, X musi być pobrane do PC.
PC X
W rzeczywistości, niski lub mało znaczący 12 bit w rejestrze instrukcji (or
IR[11-0]) odpowiada wartości X, tak że transfer jest najczęściej
realizowany:
PC IR[11-0]
Wprawdzie notacja PC X jest łatwiejsza do zrozumienia.
Jump X
Ta instrukcja jest powodem bezwarunkowego przejścia pod dany adres, X.
do wykonania tej instrukcji, X musi być pobrane do PC.
PC X
W rzeczywistości, niski lub mało znaczący 12 bit w rejestrze instrukcji (or
IR[11-0]) odpowiada wartości X, tak że transfer jest najczęściej
realizowany:
PC IR[11-0]
Wprawdzie notacja
PC X
jest łatwiejsza do zrozumienia.
Prosty
komputer
@Janusz Kosiński, 2005
Wykonywanie instrukcji
Wszystkie komputery działają według schematu:
pobierz, dekoduj i wykonaj
– czyli w cyklu
Fetch-Decode-Execute
CPU pobiera instrukcje, dekoduje je i wykonuje. Znacząca część czasu jest
zużywana do wielokrotnego (wprawdzie w różnych miejscach) kopiowania
danych.
Kiedy program jest początkowo pobierany, adres pierwszej instrukcji musi
być umieszczony w PC.
Kroki tego cyklu, są pokazane na schemacie –
kroki 1 i 2 tworzą fazę pobierania,
krok 3 – odpowiada za dekodowanie,
zaś krok 4 za wykonanie.
Prosty
komputer
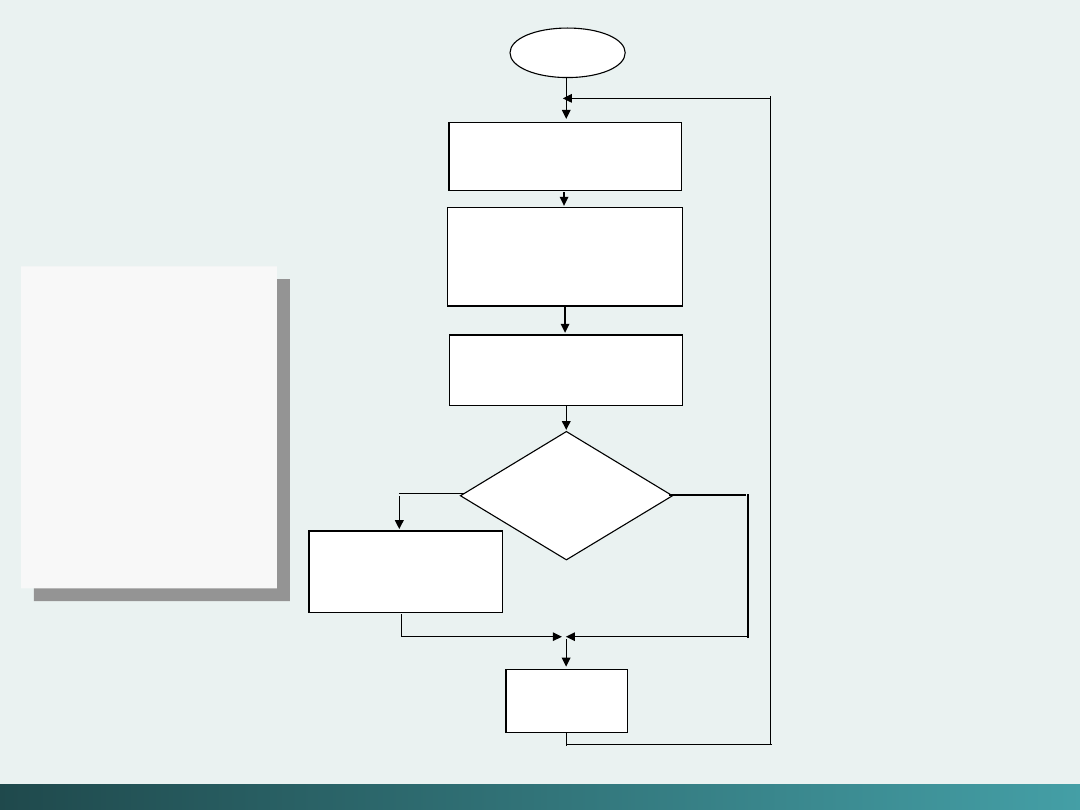
@Janusz Kosiński, 2005
Prosty
komputer
Kopiuj PC do MAR
Kopiuj zawartość
pamięci pod adresem
MAR do IR, zwiększ PC
o 1
Zdekoduj instrukcję
i umieść bity IR[11-
0] w MAR
Instrukcja wymaga
operandu?
Kopiuj zawartość
pamięci o adresie
MAR do MBR
Wykonaj
instrukcję
START
Yes
No
MAR PC
IR M[MAR]
PC PC+1
MAR IR[11–
0]
IR[15–12]
MBR M[MAR]
MAR PC
IR M[MAR]
PC PC+1
MAR IR[11–
0]
IR[15–12]
MBR M[MAR]
@Janusz Kosiński, 2005
Program dodający dwie liczby
Adres Hex
Instrukcja
Binarna
zawartość
Adresu Pamięci
Hex
zawartość
Adresu
Pamięci
100
101
102
103
104
105
106
Load
104
Add
105
Store
106
Halt
0023
FFE9
0000
0001000100000100
0011000100000101
0010000100000110
0111000000000000
0000000000100011
1111111111101001
0000000000000000
1104
3105
2106
7000
0023
FFE9
0000
Prosty
komputer
Ten program wprowadza wartość 0023
16
(dziesiętnie: 35) do AC.
Dodaje potem wartość FFE9
16
(dziesiętnie: -23), znalezioną pod adresem 105.
Wynikiem jest wartość 12 w AC.
Instrukcja Store magazynuje tę wartość po adresem 106. Kiedy program jest
zakończony, binarna zawartość adresu 106 zmienia się na 0000000000001100, w
układzie hex: 000C, lub w dziesiętnym: 12
Ten program wprowadza wartość 0023
16
(
dziesiętnie
: 35) do AC.
Dodaje potem wartość FFE9
16
(
dziesiętnie
: -23), znalezioną pod adresem 105.
Wynikiem jest wartość 12 w AC.
Instrukcja Store magazynuje tę wartość po adresem 106. Kiedy program jest
zakończony, binarna zawartość adresu 106 zmienia się na 0000000000001100, w
układzie hex: 000C, lub w dziesiętnym: 12
@Janusz Kosiński, 2005
Prosty
komputer
Krok
RTN
PC
IR
MAR
MBR
AC
LOAD 104
(wartości
początkowe)
100
……
……
……
……
FETCH
MAR PC
100
……
100
……
……
IR M[MAR]
100
1104
100
……
……
PC PC + 1
101
1104
100
……
……
DECODE
MAR IR[11-0]
101
1104
104
……
……
(DECODE IR[15-
12]
101
1104
104
……
……
GET OPERAND
MBR M[MAR]
101
1104
104
0023
……
EXECUTE
AC MBR
101
1104
104
0023
0023
ADD 105
(wartości początkowe)
101
1104
104
0023
0023
FETCH
MAR PC
101
1104
101
0023
0023
IR M[MAR]
101
3105
101
0023
0023
PC PC + 1
102
3105
101
0023
0023
DECODE
MAR IR[11-0]
102
3105
105
0023
0023
(DECODE IR[15-
12]
102
3105
105
0023
0023
GET OPERAND
MBR M[MAR]
102
3105
105
FFE9
0023
EXECUTE
AC AC + MBR
102
3105
105
FFE9
000C
STORE 106
(wartości początkowe)
102
3105
105
FFE9
000C
FETCH
MAR PC
102
3105
102
FFE9
000C
IR M[MAR]
102
2106
102
FFE9
000C
PC PC + 1
103
2106
102
FFE9
000C
DECODE
MAR IR[11-0]
103
2106
106
FFE9
000C
(DECODE IR[15-
12]
103
2106
106
FFE9
000C
GET OPERAND
niekonieczne
103
2106
106
FFE9
000C
EXECUTE
MBR AC
103
2106
106
000C
000C
EXECUTE
M[MAR] MBR
103
2106
106
000C
000C
@Janusz Kosiński, 2005
Rozwiązania
Każdy członek rodziny x86 w architekturze Intela, jest znany jako
CISC (
Complex Instruction Set Computer
), podczas gdy rodzina
Pentium i architektury MIPS są przykładami RISC (
Reduced
Instruction Set Computer
).
CISC
posiada dużą liczbę instrukcji zmiennej długości o złożonych
formatach. Duża liczba tych instrukcji jest bardzo skomplikowana -
wykonują liczne operacje podczas wykonywania pojedynczej instrukcji
(np., jest możliwe wykonywanie pętli stosując pojedynczą instrukcję
asemblera). Podstawowym problemem maszyn CISC jest to, że mały
podzbiór złożonych instrukcji spowalnia system.
W
architekturze RISC
, liczba instrukcji jest zredukowana, aczkolwiek
główną przyczyną jej powstania było uproszczenie instrukcji, w celu
uzyskania szybszego ich wykonywania. Każda instrukcja wykonuje
tylko jedną operację, wszystkie są tej samej długości i tylko w
kilku różnych formatach a wszystkie operacje arytmetyczne muszą
być wykonane między rejestrami (dane w pamięci nie mogą być
operandami).
@Janusz Kosiński, 2005
Pierwszy popularny chip Intel’a – 8086, został wprowadzony w 1979 .
Obsługiwał 16 bitowe dane i pracował z 20 bitowymi adresami – to
pozwalało na zaadresowanie miliona bajtów pamięci. CPU byłą podzielona
na dwie części: wykonawczą (rejestry ogólne i ALU) oraz BUS
(kolejkowanie instrukcji, rejestry segmentów i wskaźnik instrukcji).
8086 miał cztery 16 bitowe rejestry ogólnego zastosowania, nazwane
AX (podstawowy akumulator), BX (rejestr bazowy używany do
rozszerzania adresów), CX (rejestr licznika) i DX (rejestr danych). Każdy z
tych rejestrów był podzielony na dwie części: bardziej znaczące
(oznakowane AH, BH, CH i DH), oraz mniej znaczące (oznakowane AL,
BL, CL, i DL).
Rozwiązania
@Janusz Kosiński, 2005
Asembler w 8086 był podzielony na różne segmenty – bloki obsługujące
specyficzne rodzaje informacji. Był tam segment kodu (CS) –
podtrzymujący program, segment danych (DS) – podtrzymujący dane
programu i segment stosu (SS) – podtrzymujący stos programu. Stąd
pojawiały się odpowiednie rejestry. Był również czwarty segment (ES)
używany prze niektóre operacje stringowe do adresowania pamięci.
Adresowanie było specyficzne: segment/ofset w postaci: xxx:yyy
(wartość segmentu i wartość offsetu).
Rozwiązania
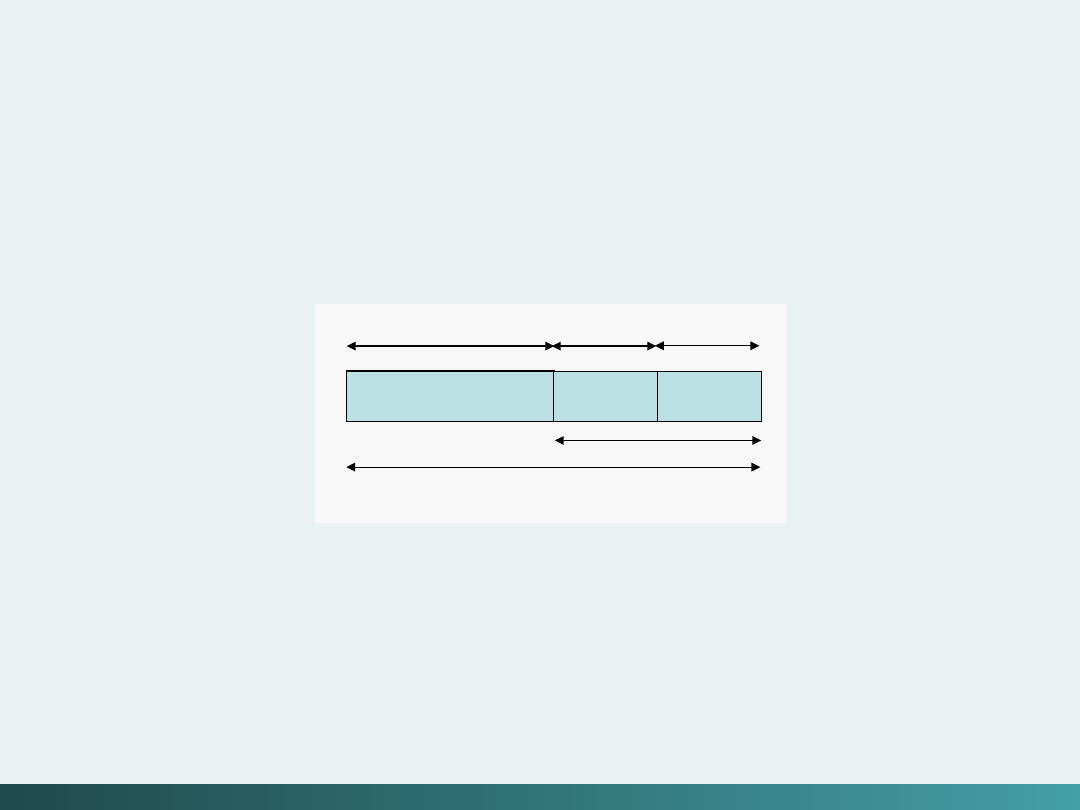
@Janusz Kosiński, 2005
Konwencja nazewnicza zastosowana w 80386, przy przejściu z
16 do 32 bitów, polegała na zastosowaniu przedrostka E
(extended).
Zamiast AX, BX, CX, i DX, rejestry stały się EAX, EBX, ECX, i
EDX.
AL
AH
EA
X
AX
8
bitów
8
bitów
16
bitów
32 bity
Rozwiązania
@Janusz Kosiński, 2005
Rodzina MIPS dla CPU - MIPS R3000, R4000, R5000, R8000, i R10000
są to znaki handlowe należące do MIPS Technologies, Inc.
Chipy MIPS są stosowane w systemach rozszerzonych (dodawanych
do komputerów ) takich jak Silicon Graphics machines i różnych
komputeryzowanych zabawkach (
Nintendo
i
Sony
używają MIPS CPU).
Cisco, znany producent routerów internetowych stosuje również MIPS
CPU.
MIPS
jest architekturą
pobierz/zmagazynuj
, co oznacza że
wszystkie instrukcje (inne niż LOAD czy STORE) muszą używać
rejestrów jako operandów.
Rozwiązania
Document Outline
- ARCHITEKTURA KOMPUTERÓW
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Wprowadzenie do architektury komputerów
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Reprezentacja danych w systemach komputerowych
- Slide 64
- Slide 65
- Slide 66
- Slide 67
- Slide 68
- Slide 69
- Slide 70
- Slide 71
- Slide 72
- Slide 73
- Slide 74
- Slide 75
- Slide 76
- Slide 77
- Slide 78
- Slide 79
- Slide 80
- Slide 81
- Slide 82
- Slide 83
- Slide 84
- Slide 85
- Slide 86
- Slide 87
- Slide 88
- Slide 89
- Slide 90
- Slide 91
- Slide 92
- Slide 93
- Slide 94
- Slide 95
- Slide 96
- Slide 97
- Slide 98
- Slide 99
- Slide 100
- Slide 101
- Slide 102
- Slide 103
- Slide 104
- Slide 105
- Slide 106
- Slide 107
- Slide 108
- Slide 109
- Slide 110
- Algebra Boole’a i logika cyfrowa
- Slide 112
- Slide 113
- Slide 114
- Slide 115
- Slide 116
- Slide 117
- Slide 118
- Slide 119
- Slide 120
- Slide 121
- Slide 122
- Slide 123
- Slide 124
- Slide 125
- Slide 126
- Slide 127
- Slide 128
- Slide 129
- Slide 130
- Slide 131
- Slide 132
- Slide 133
- Slide 134
- Slide 135
- Slide 136
- Slide 137
- Slide 138
- Slide 139
- Slide 140
- Slide 141
- Slide 142
- Slide 143
- Slide 144
- Slide 145
- Slide 146
- Slide 147
- Slide 148
- Slide 149
- Slide 150
- Slide 151
- Slide 152
- Slide 153
- Slide 154
- Wprowadzenie do prostego komputera
- Slide 156
- Slide 157
- Slide 158
- Slide 159
- Slide 160
- Slide 161
- Slide 162
- Slide 163
- Slide 164
- Slide 165
- Slide 166
- Slide 167
- Slide 168
- Slide 169
- Slide 170
- Slide 171
- Slide 172
- Slide 173
- Slide 174
- Slide 175
- Slide 176
- Slide 177
- Slide 178
- Slide 179
- Slide 180
- Slide 181
- Slide 182
- Slide 183
- Slide 184
- Slide 185
- Slide 186
- Slide 187
- Slide 188
- Slide 189
- Slide 190
- Slide 191
- Slide 192
- Slide 193
- Slide 194
- Slide 195
- Slide 196
- Slide 197
- Slide 198
- Slide 199
- Slide 200
- Slide 201
- Slide 202
Wyszukiwarka
Podobne podstrony:
archi wykl 09
archi wykl 13
archi wykl 14
archi wykl 12
archi wykl 07
archi wykl 11
archi wykl 06
wfm5 archi
KRAŚNIK GALERIA RAJ ARCHI BUD OPIS A
debussy La fille aux cheveux de lin archi
archi wykl 08
archi wykl 05
archi wykl1
archi wykl 10
archi wykl 15
Do mówienia Archi
archi wykl 09
więcej podobnych podstron