MECHANIKA
TEORETYCZNA I
STATYKA
WYBRANE RYSUNKI
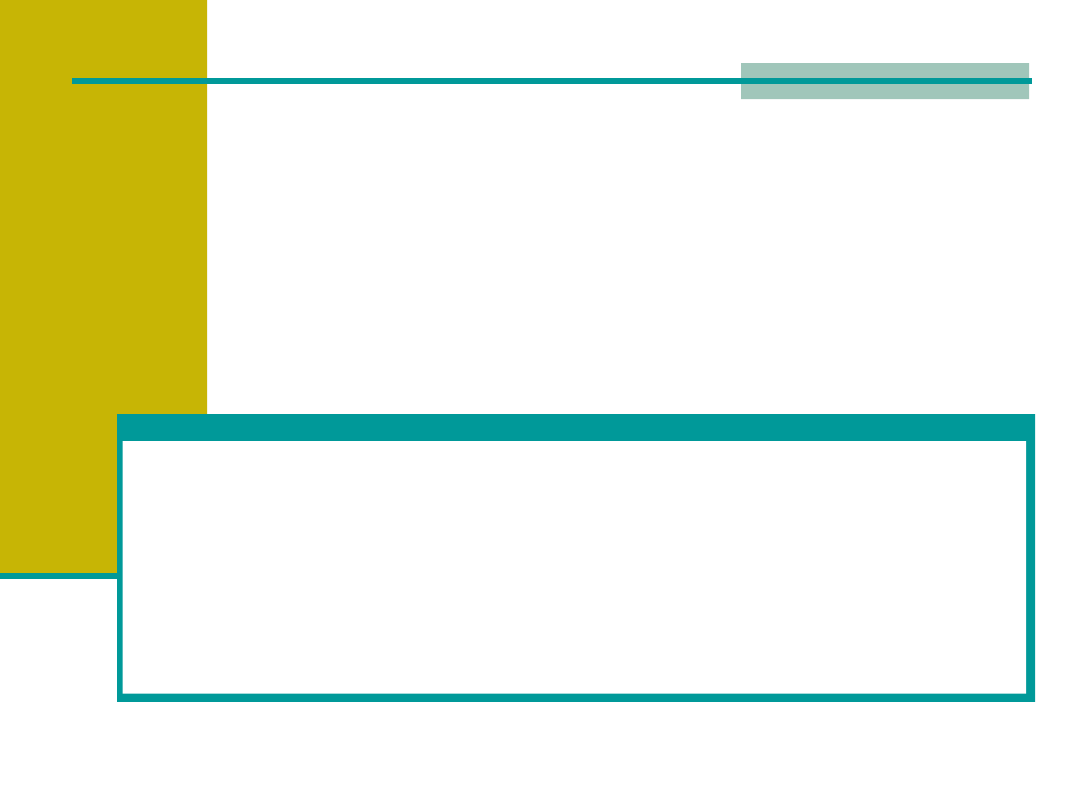
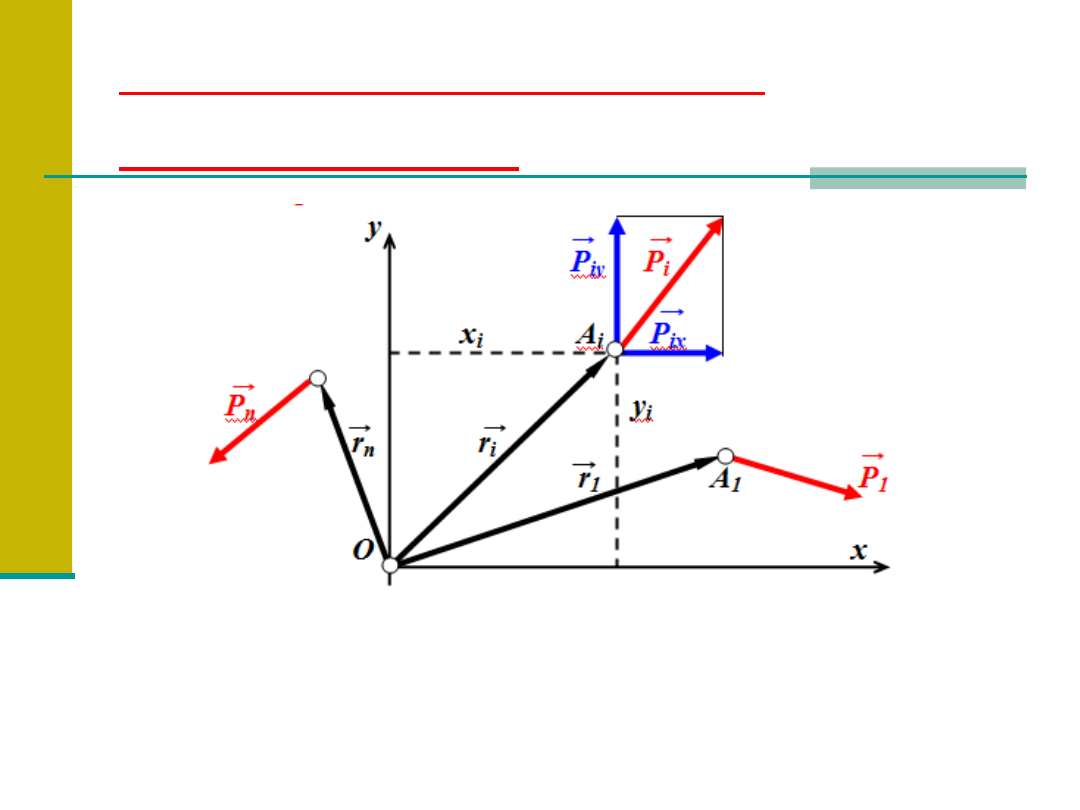
Zbieżne układy sił
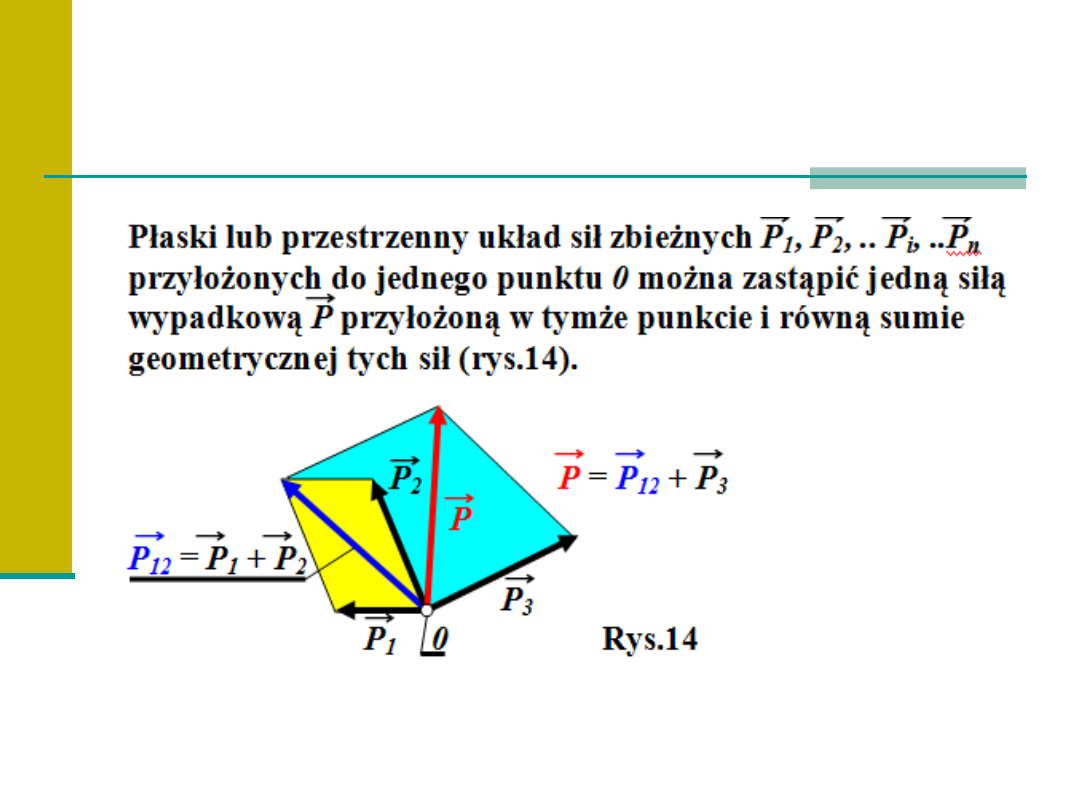
Analityczny sposób wyznaczania
wypadkowej przestrzennego układu sił
zbieżnych (rys.15).
TWIERDZENIE O SUMIE RZUTÓW WEKTORÓW
Rzut sumy geometrycznej wektorów na dowolną oś równy jest
sumie rzutów tych wektorów na tę samą oś.
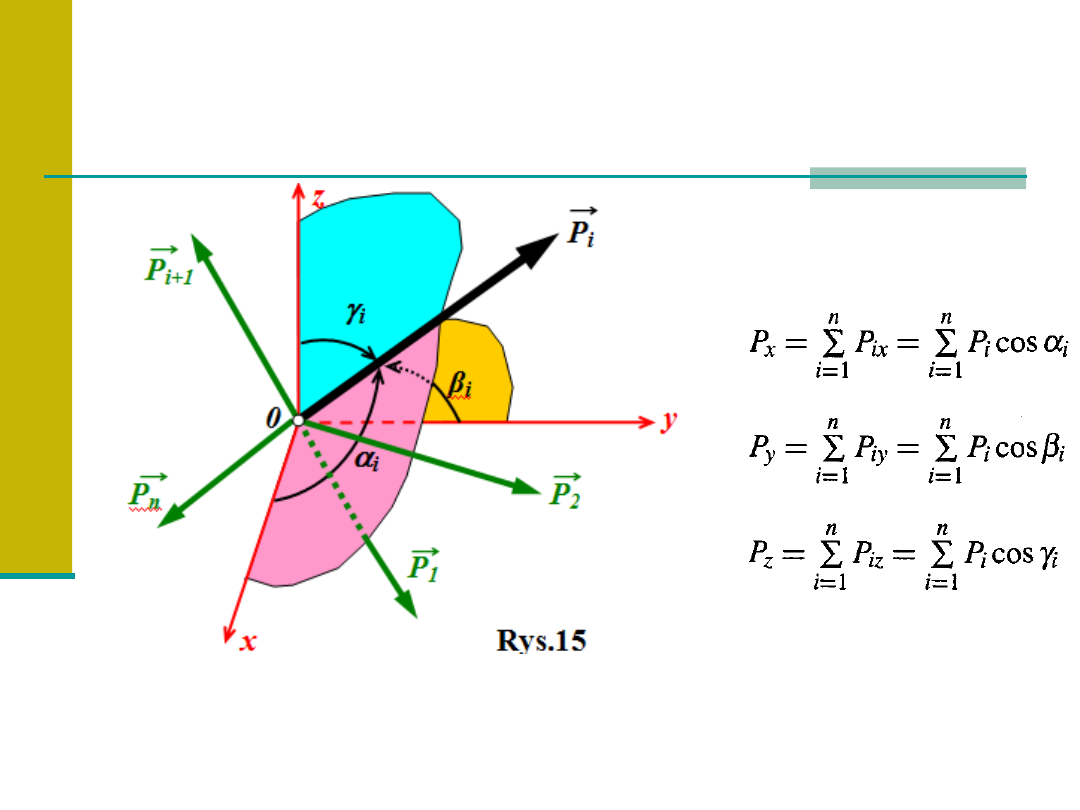
Składowe siły Pi na osie
prostokątnego układu 0xyz (rys.16)
P
ix
= P
i
cos
i
P
iy
= P
i
cosβ
i
(13)
P
iz
= P
i
cos
i
n
i
1
i
i
i
x
cos
P
P
n
i
1
i
i
i
y
cos
P
P
n
i
1
i
i
i
z
cos
P
P
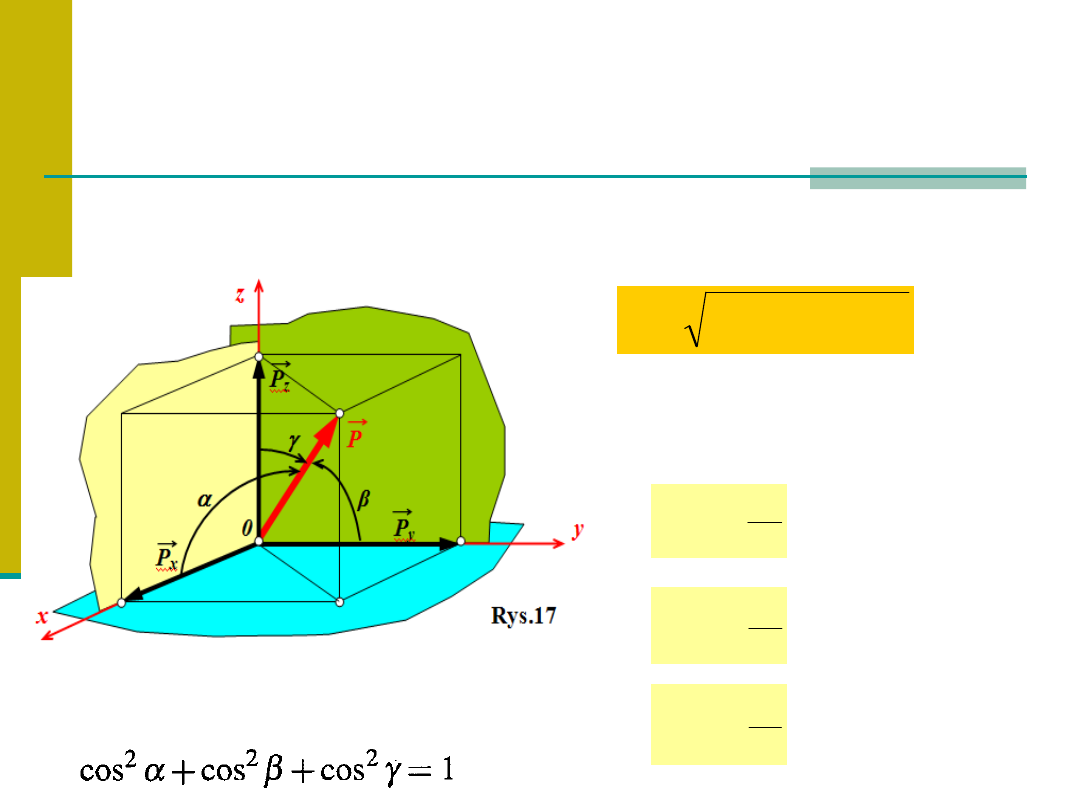
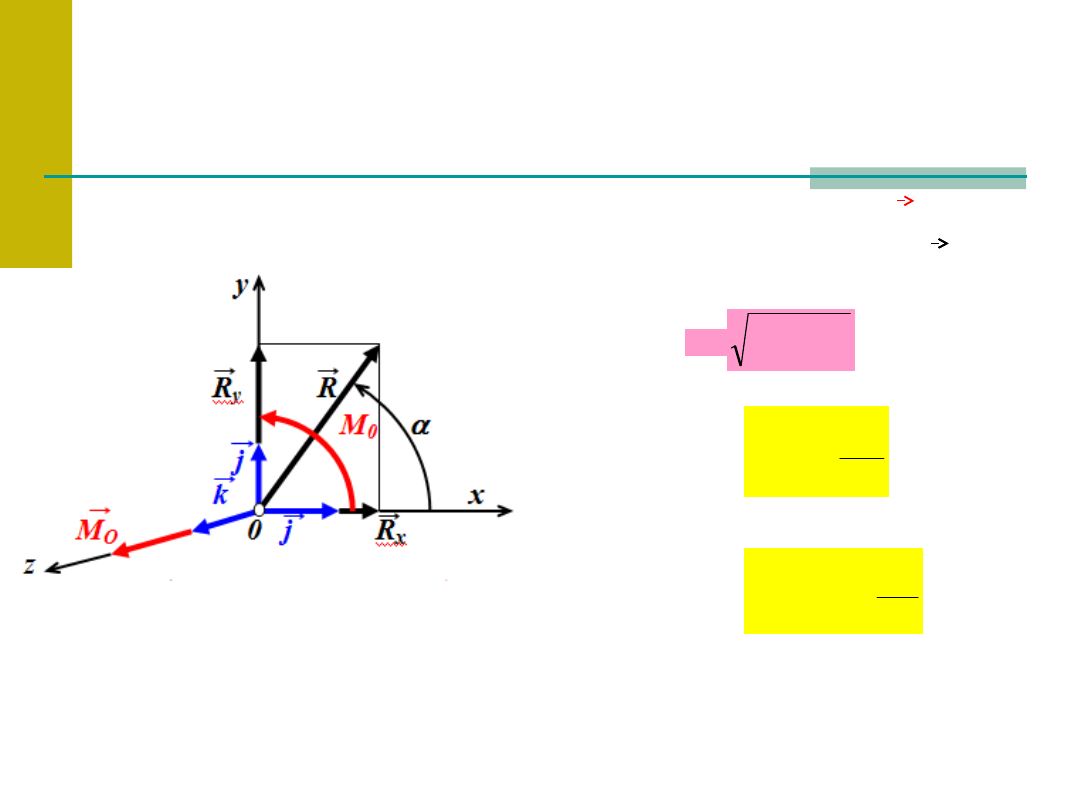
Wartość liczbowa wypadkowej P
określamy z (15) (rys.17)
(15)
cosinusy kierunkowe
określamy z (16)
(16)
2
z
2
y
2
x
P
P
P
P
P
P
cos
x
P
P
cos
y
P
P
cos
z
Cosinusy kierunkowe spełniają zależność.
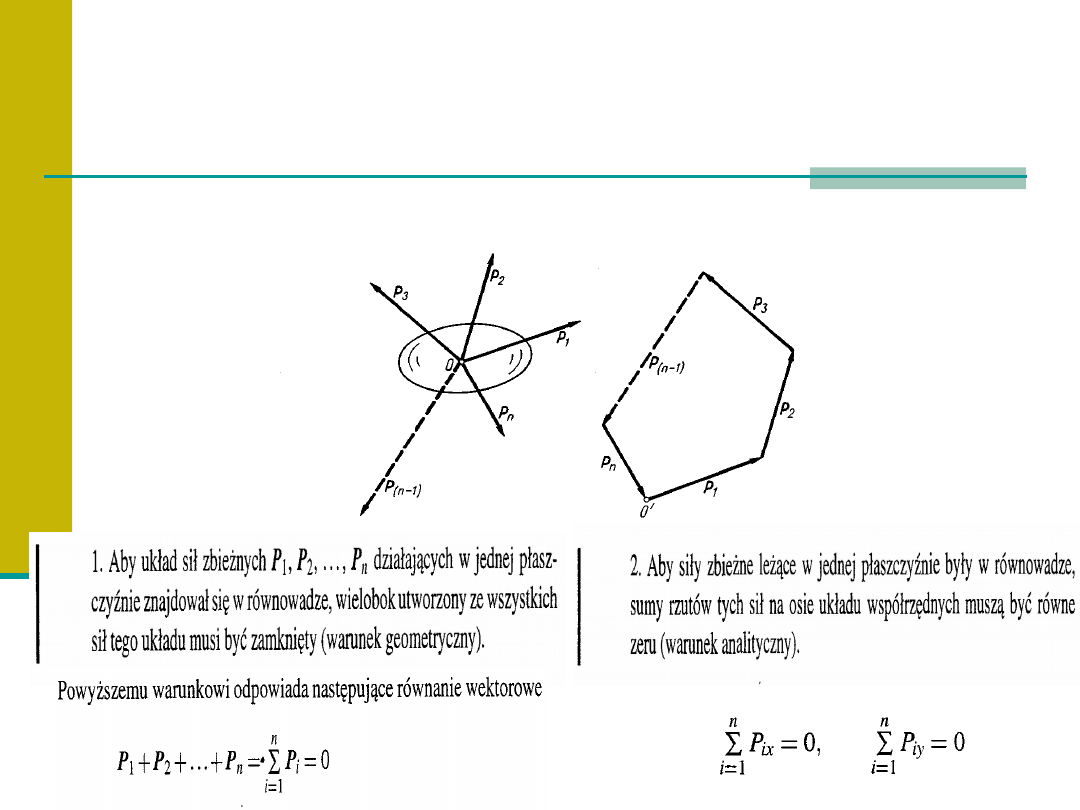
Równowaga płaskiego i
przestrzennego układu sił
zbieżnych
Równowaga płaskiego układu n sił
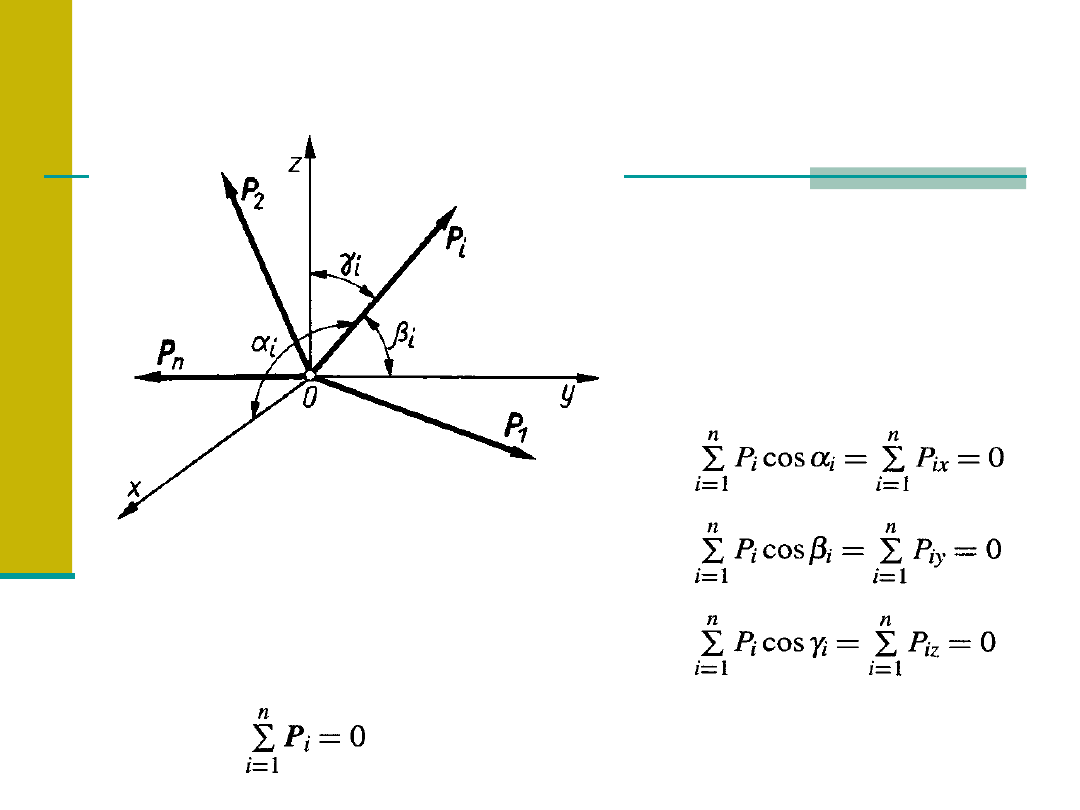
Równowaga przestrzennego układu n sił
Warunek równowagi
przestrzennego układu sił
zbieżnych w postaci
wektorowej wyraża się
równaniem
Warunek równowagi
przestrzennego układu sił
zbieżnych w postaci
analitycznej wyraża się
równaniem
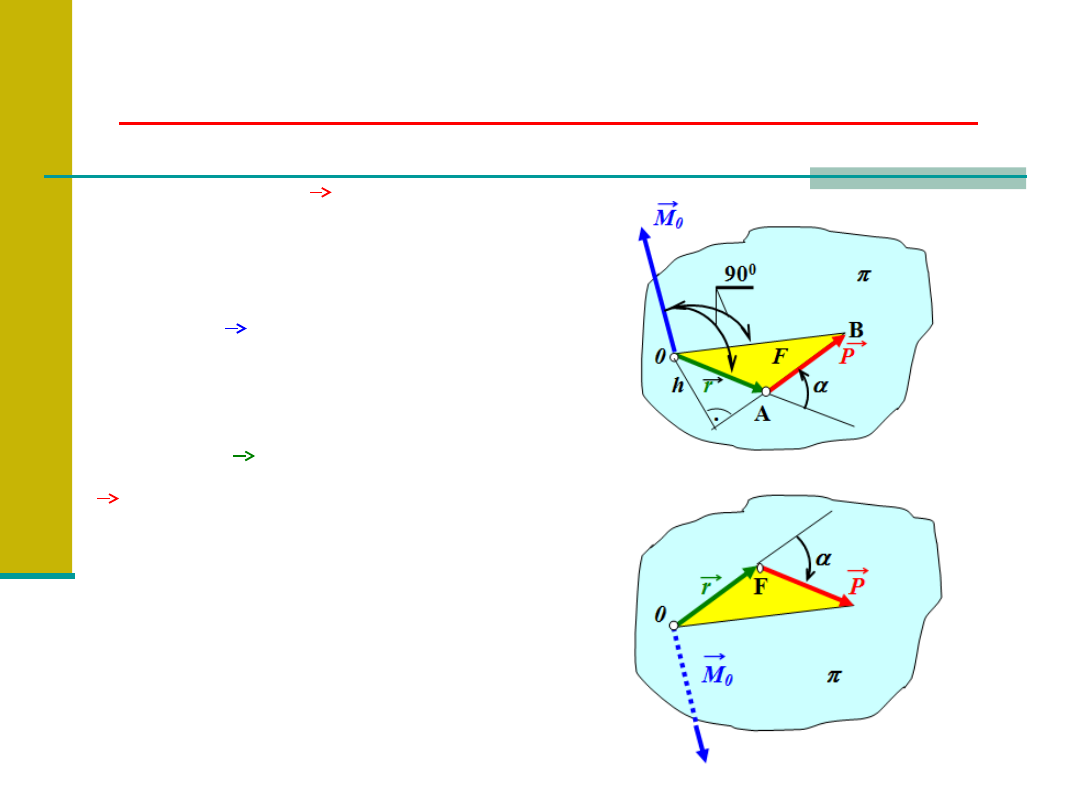
Moment siły względem punktu.
Moment siły
P
względem punktu 0
nazywamy odłożony
z punktu 0 wektor
M
0
, równy iloczynowi
wektorowemu
promienia wektora r
i wektora siły
P
.
P
r
M
0
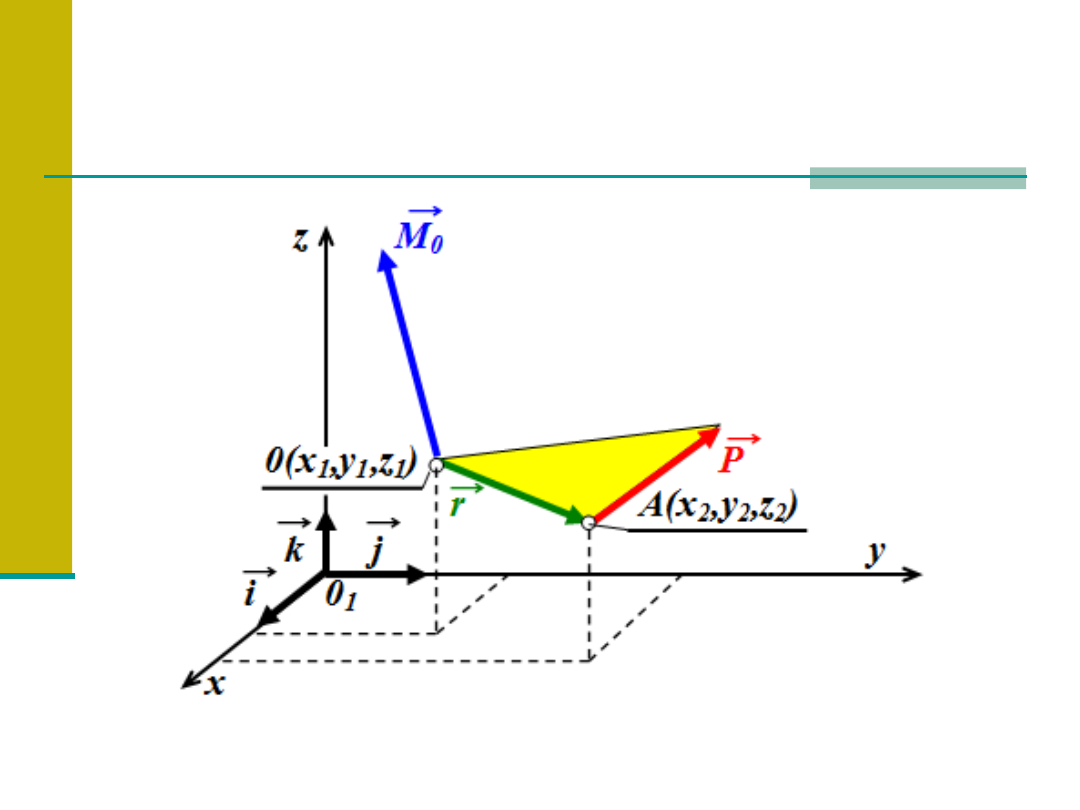
Moment siły względem dowolnego punktu 0
w przestrzeni
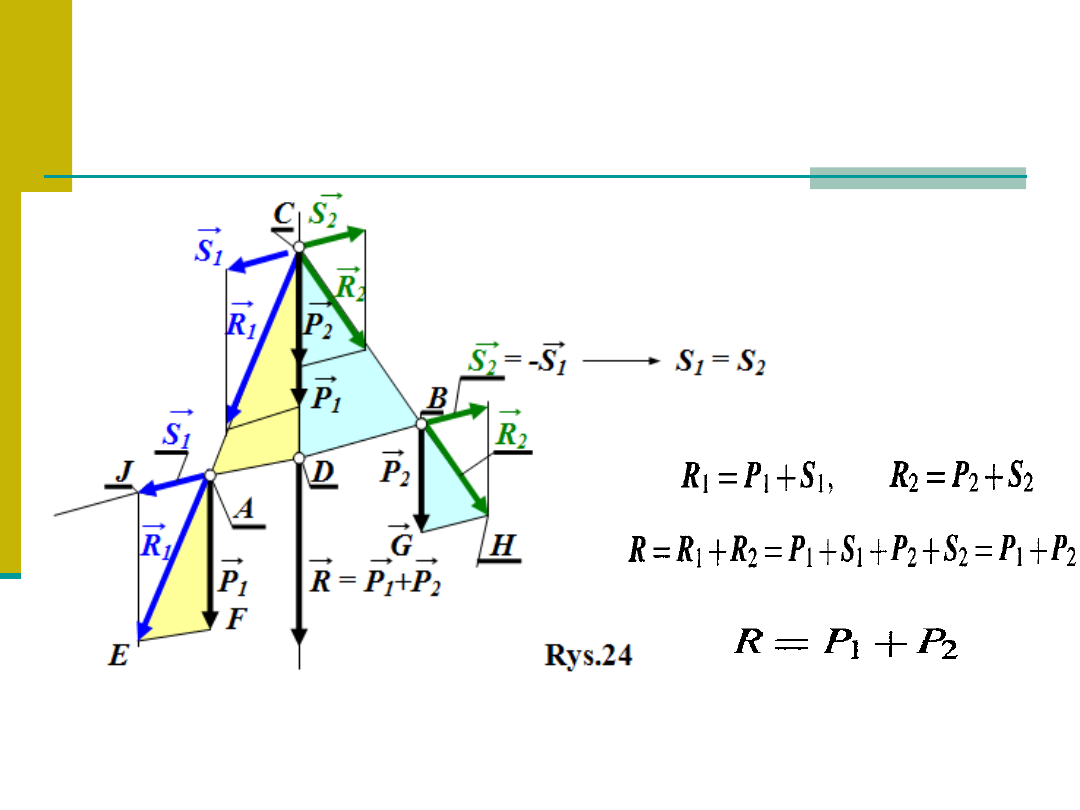
Wypadkowa dwóch sił równoległych zgodnie skierowanych
SIŁY RÓWNOLEGŁE
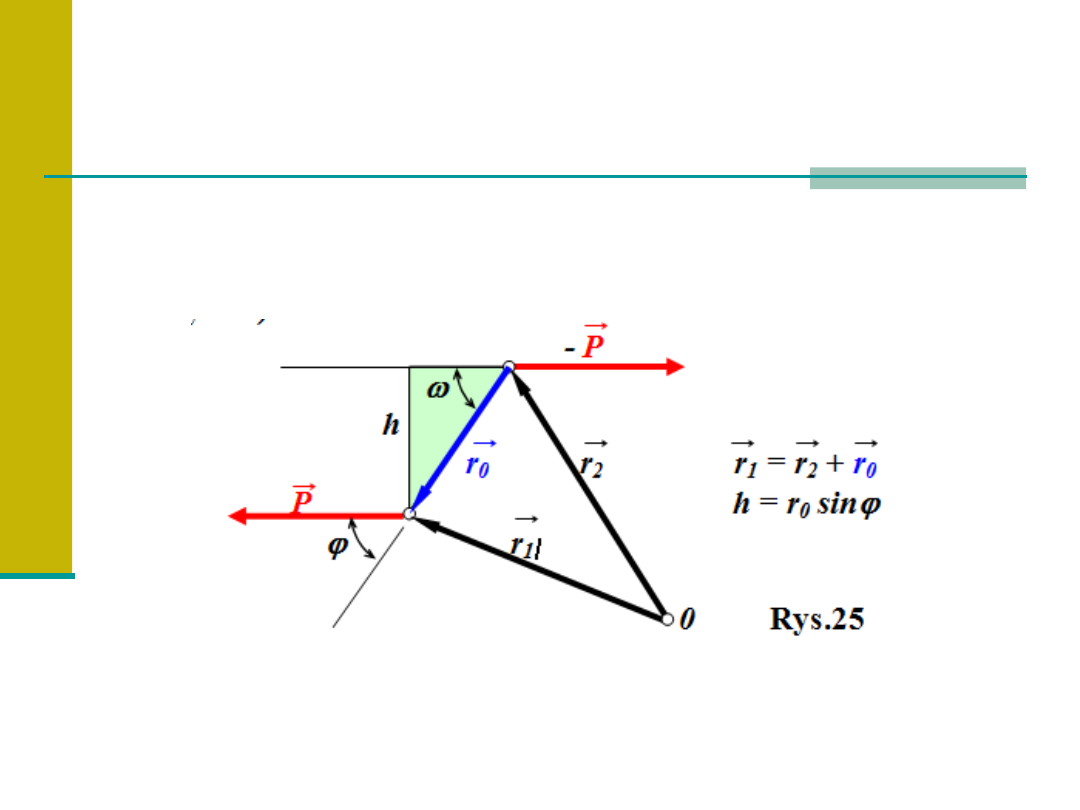
Układ dwóch sił o równych wartościach, lecz
przeciwnych zwrotach nazywamy
parą sił
. (rys.25)
PARA SIŁ
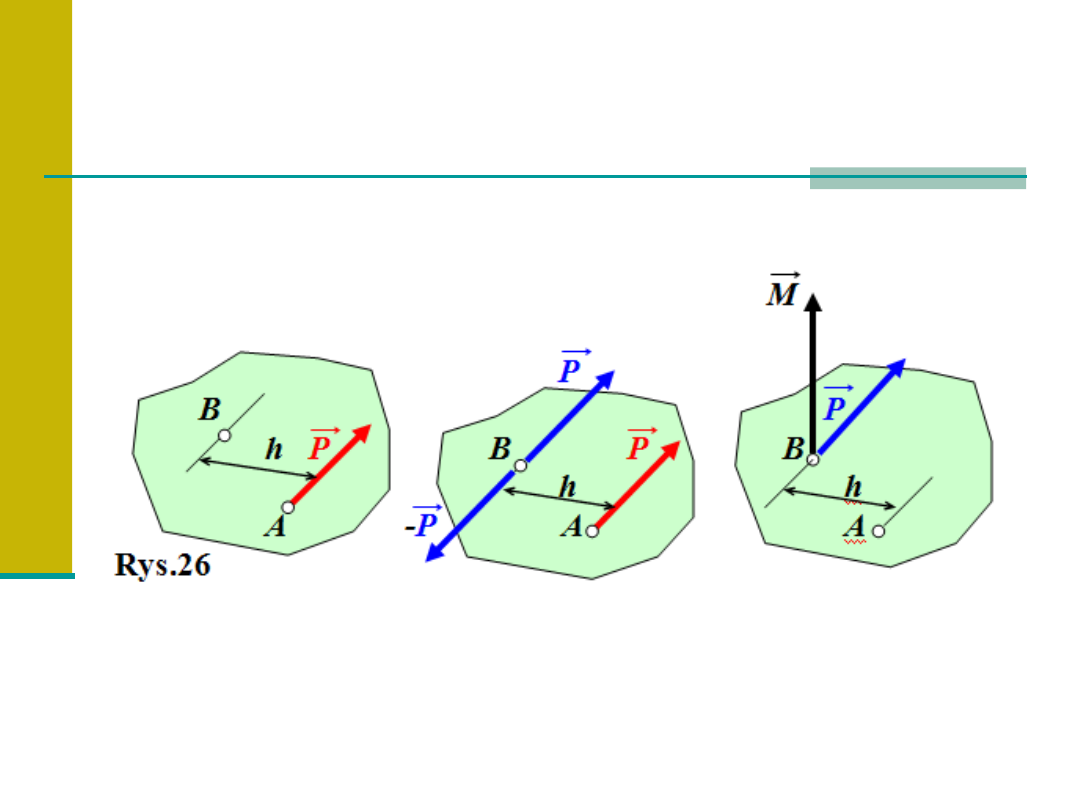
Równoległe
przesunięcie sił (rys.26)
a)
b)
c)
Redukcja płaskich
układów sił
Układ sił, którego siły leżą w jednej
płaszczyźnie, jest nazywany układem płaskim.
Wektor główny
R
i
moment główny
M
0
R
2
2
x
y
R
R
R
y
R
sin
R
y
R
arcsin
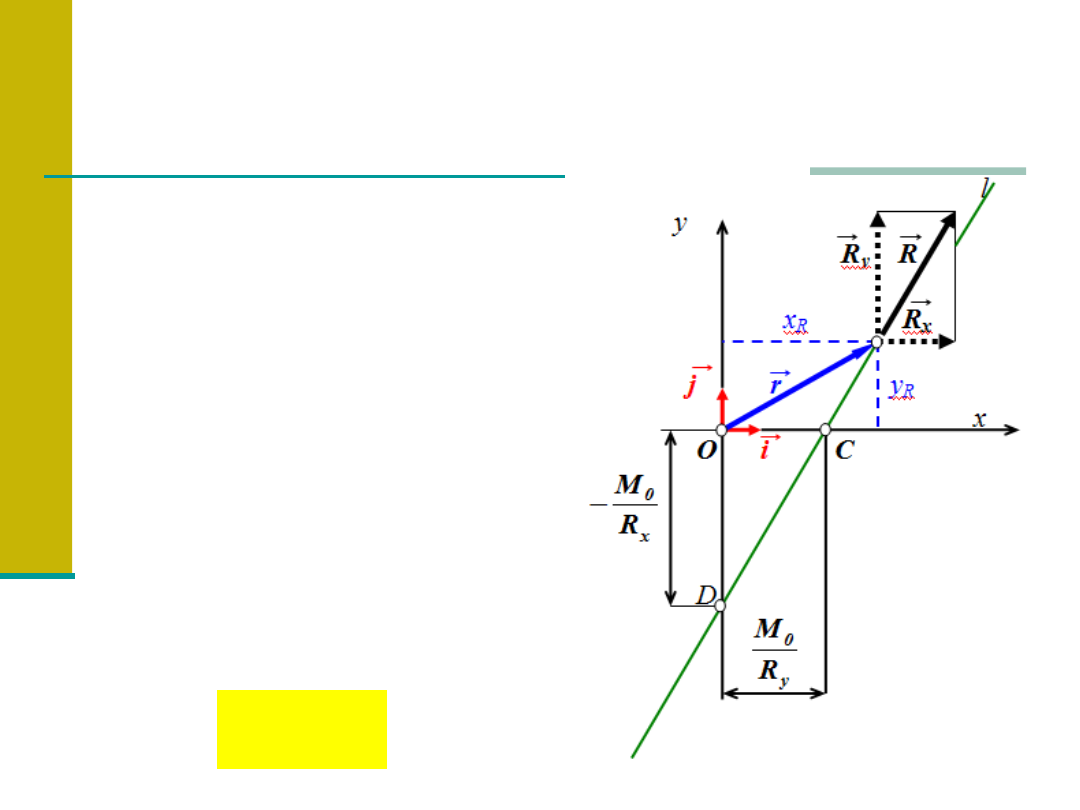
Redukcja płaskiego układu sił do jednej
siły wypadkowej
Równanie linii
działania wypadkowej
wyznacza się z
warunku, że moment
siły wypadkowej
względem początku
układu równa się
momentowi
głównemu M
0
,
równemu sumie
momentów danych sił
względem początku
układu
współrzędnych.
0
M
R
r
Wypadkowa płaskiego układu
sił
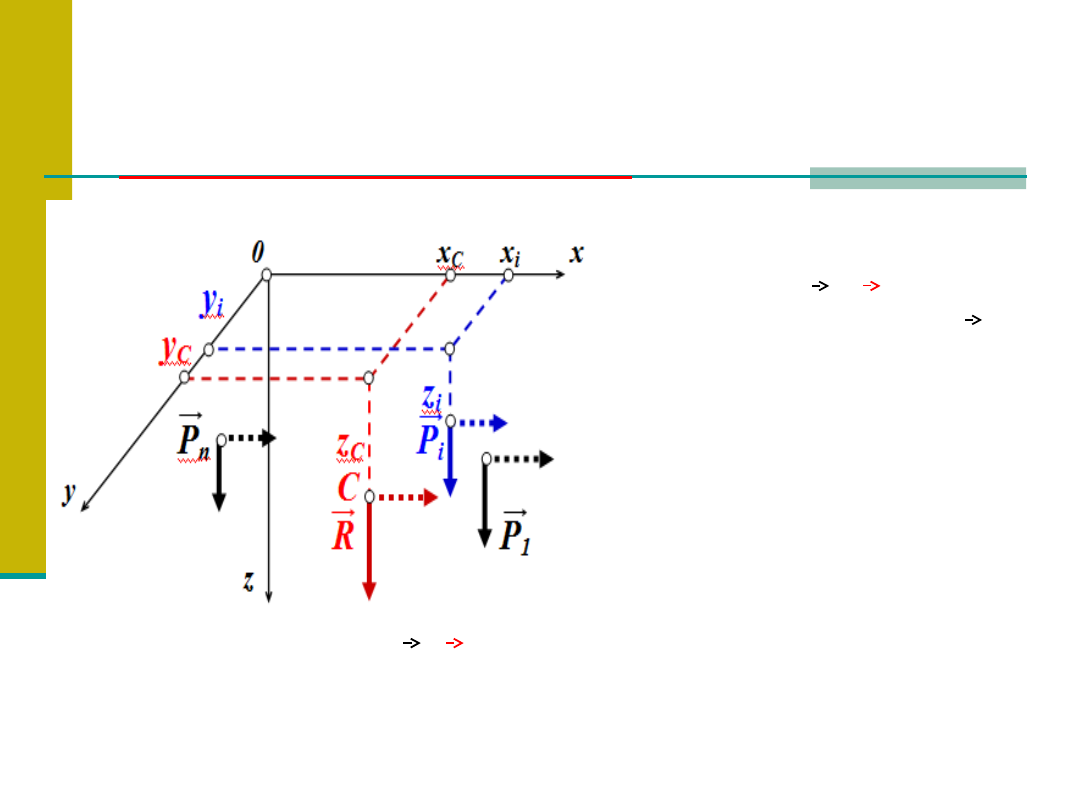
PRZESTRZENNY UKŁAD SIŁ
RÓWNOLEGŁYCH
Środek sił równoległych
Punkt C mający tę
własność, że przechodzi
przez niego stale
wypadkowa W=
R
danego
układu sił równoległych P
niezależnie od kierunku
tych sił (przy niezmiennych
punktach przyłożenia i
wartości sił) nazywa się
środkiem sił równoległych.
Moment siły wypadkowej W=
R
względem dowolnego punktu
równa się sumie momentów układu sił względem tego samego
punktu (
twierdzenie Varingnona
).
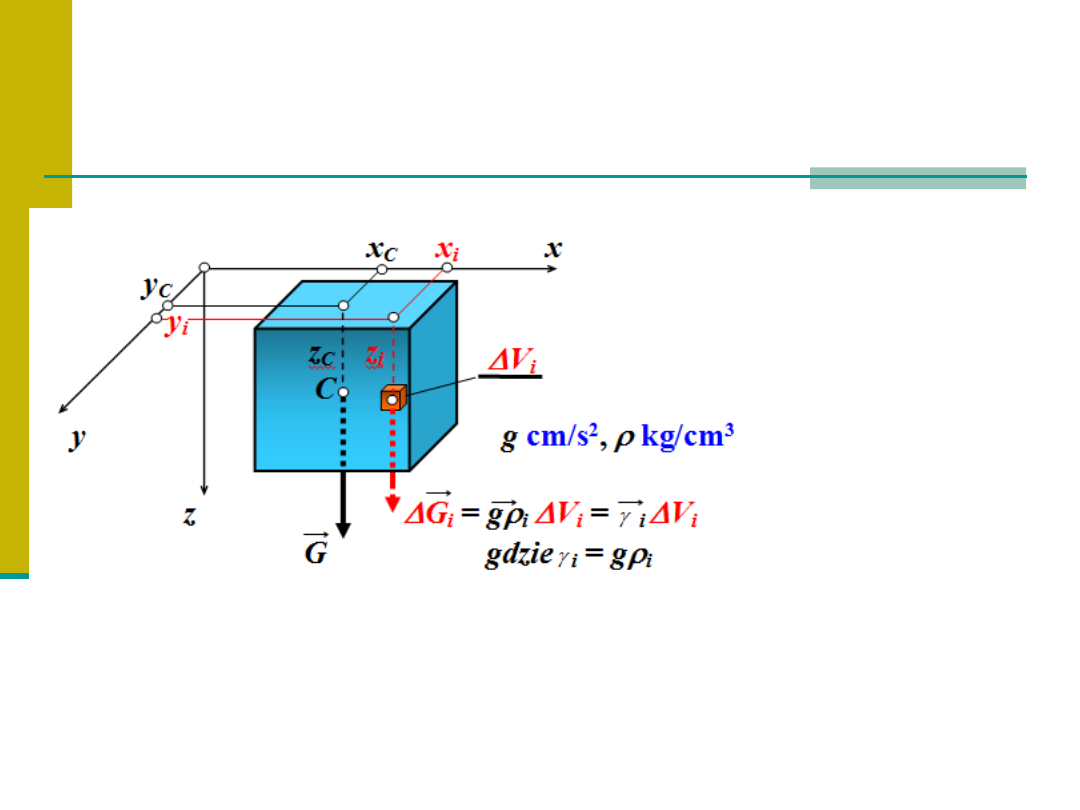
Środek ciężkości
Najczęściej
spotykanym
przykładem sił
równoległych są siły
ciężkości.
Określony poprzednio środek sił równoległych w odniesieniu do sił
ciężkości nazywamy
środkiem ciężkości.
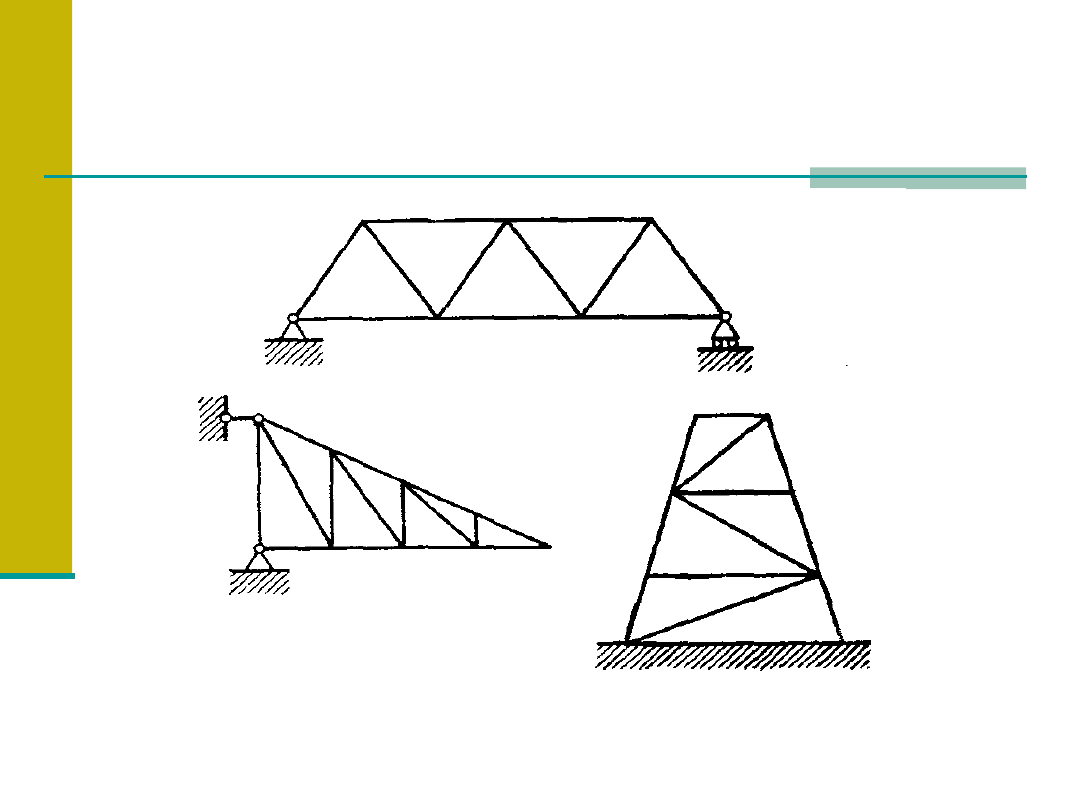
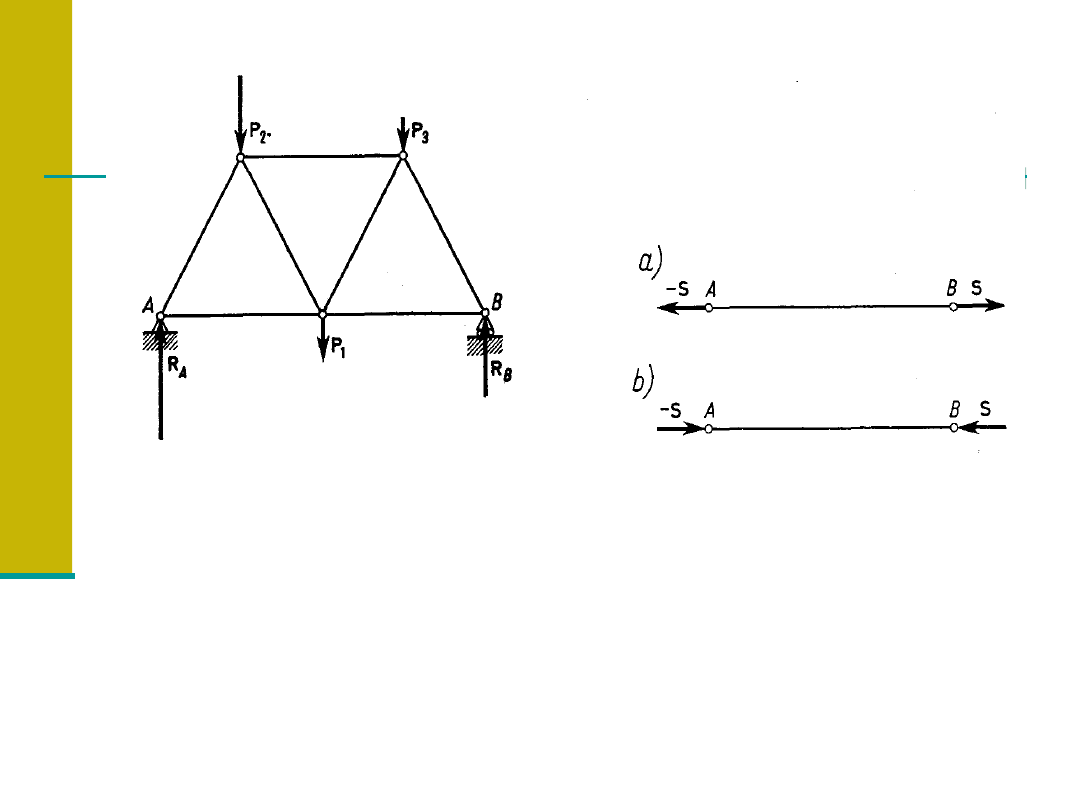
Przykłady kratownic
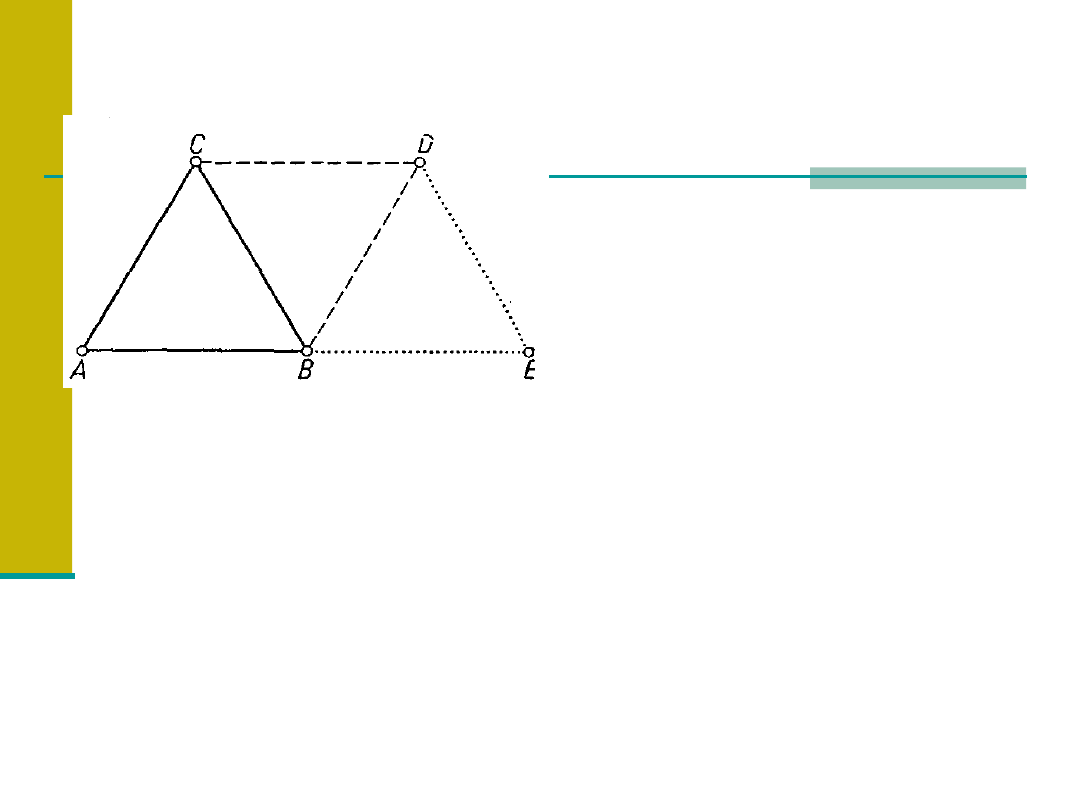
Warunek statycznej wyznaczalności kratownic.
Kratownica ABC składa się z
trzech prętów zakończonych
przegubami. Dla utworzenia
nowego węzła potrzebne są 2
pręty.
Z zasady tworzenia nowych
węzłów wynika związek:
p=2w-3
Jest to związek, który musi być spełniony, aby kratownica
była niezmienna geometrycznie, czyli inaczej, sztywna w
swej płaszczyźnie.
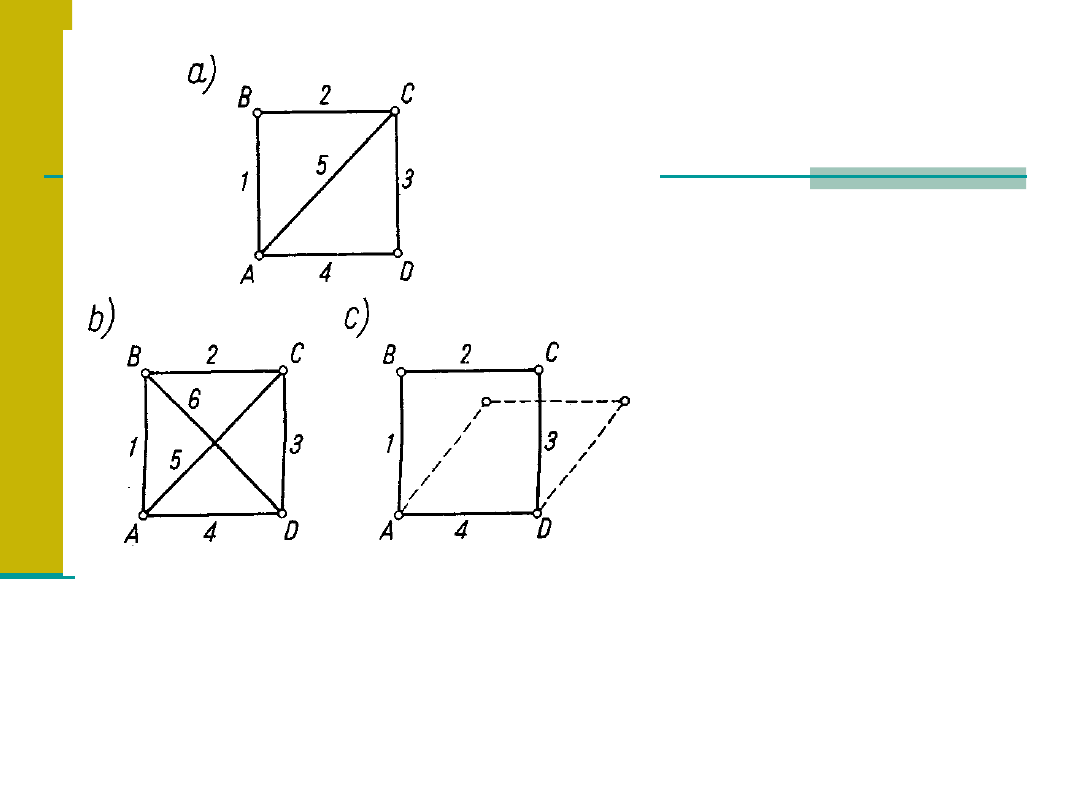
a) p=5; w=4 warunek
sztywności spełniony,.
b) Układ pszesztywniony
ponieważ jeśli usuniemy
jeden pręt, kratownica
nadal będzie układem
niezmiennym,
c) Warunek sztywności
niespełniony, ponieważ
p=4<2w-3=5
Układ może zmieniać
kształt
Warunek sztywności jest konieczny ale niewystarczający w
pewnych przypadkach, jedna część kratownicy może być
przesztywniona, druga zaś niedostatecznie sztywna ( np. b+c).
Siły działające na kratownicę w jej płaszczyźnie w węzłach
powodują powstawanie sił w prętach. Ponieważ każdy z prętów
znajduje się w równowadze, przyłożone do niego siły muszą
być równe co do wartości, przeciwne co do kierunku i muszą
działać wzdłuż osi pręta.
a) pręt rozciągany (siła skierowana zawsze „ od węzła”),
b) pręt ściskany (siła skierowana zawsze „ do węzła”),
Znajomość powyższych sił jest niezbędna do projektowania
kratownic.
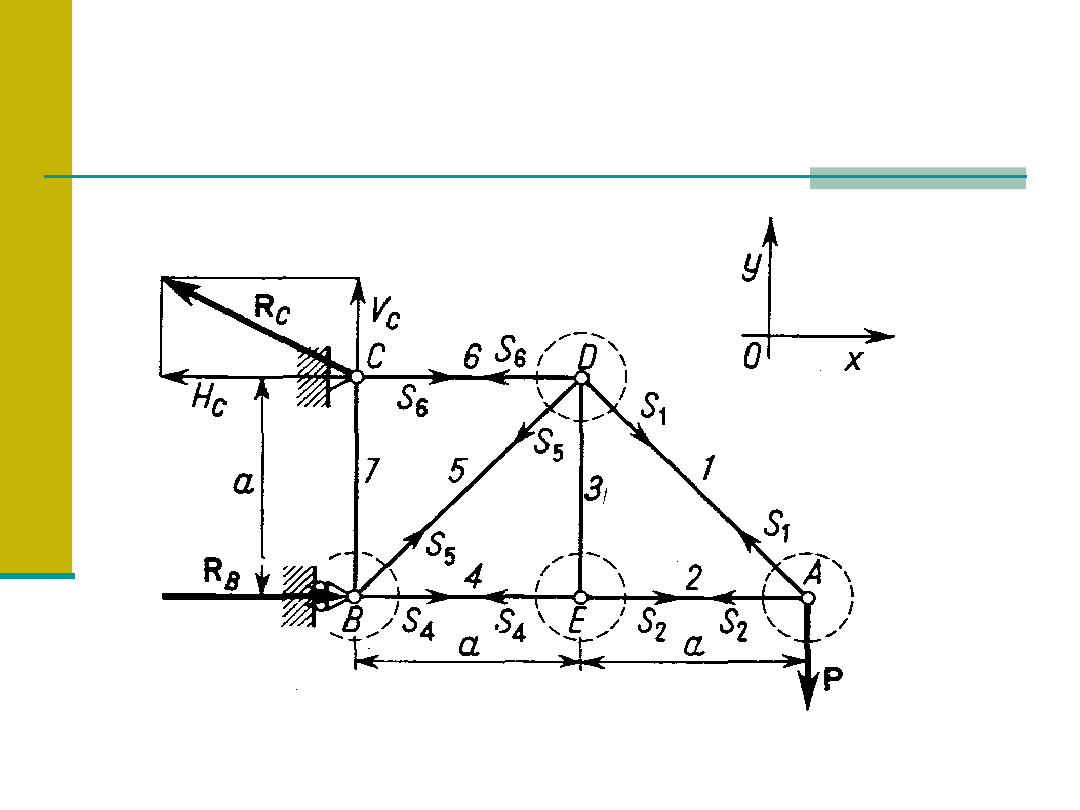
ANALITYCZNE WYZNACZANIE SIŁ
DZIAŁAJĄCYCH NA PRĘTY W KRATOWNICY.
Zaleta-przejrzystość
Wada-kumulacja błędów długości i równoległości
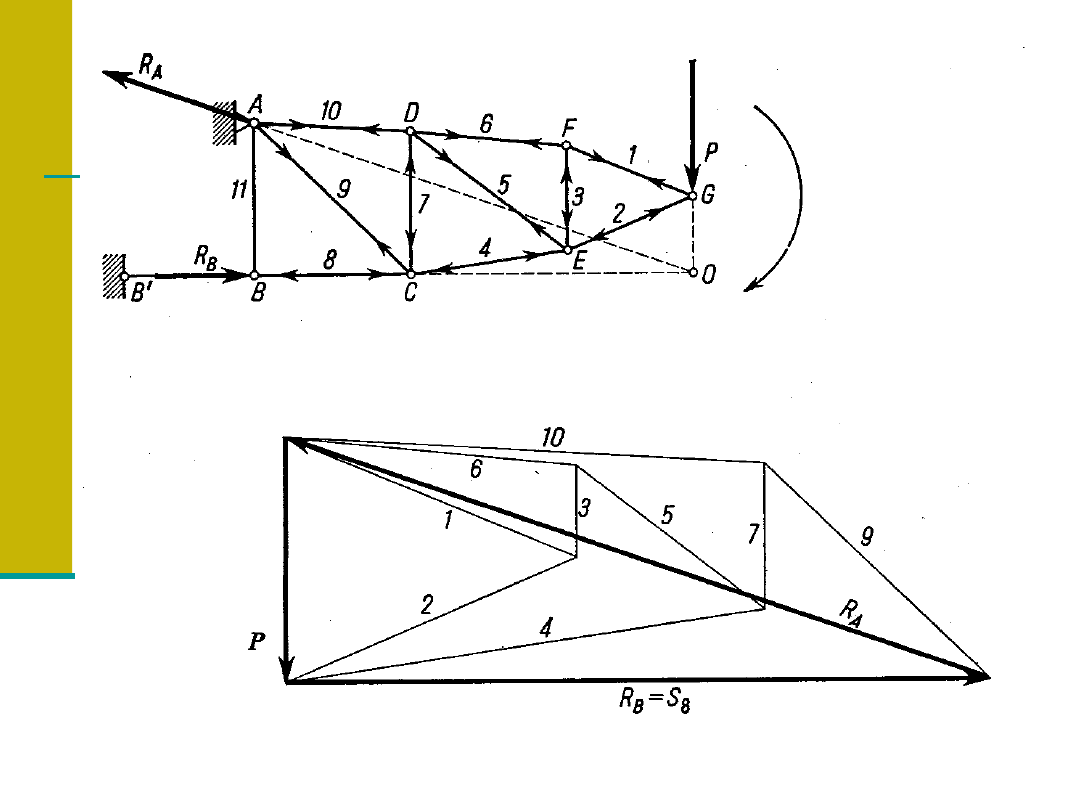
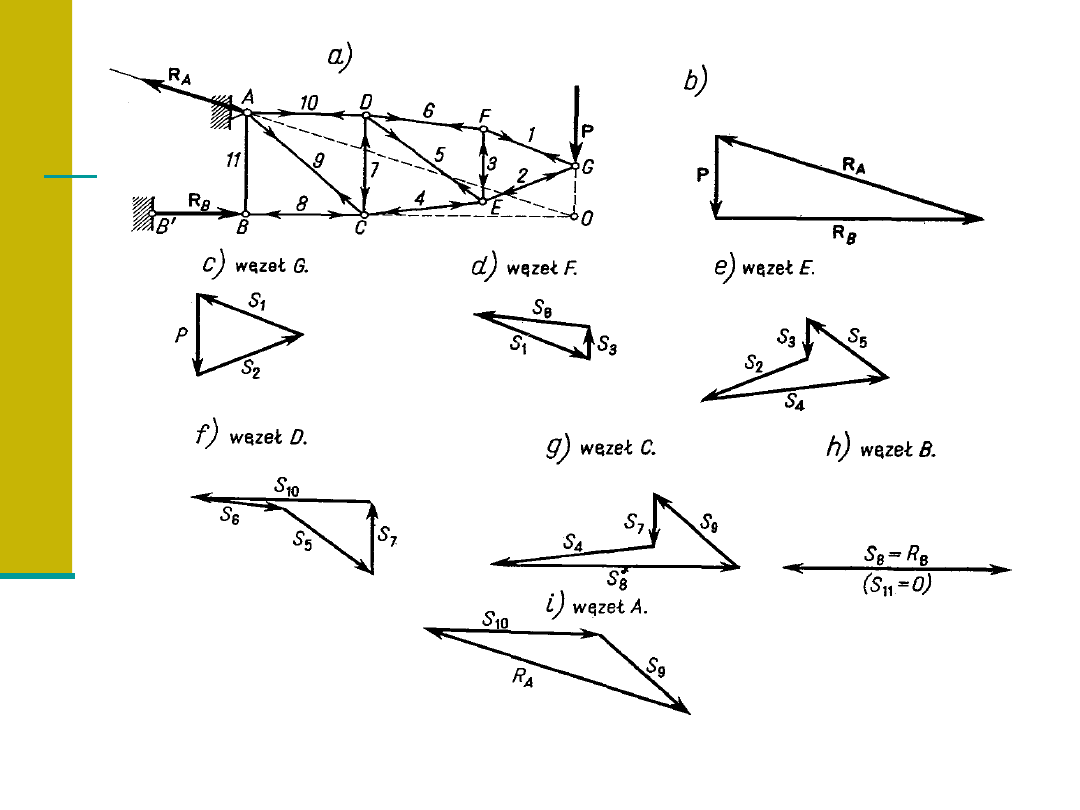
Plan sił Cremony dla kratownicy.
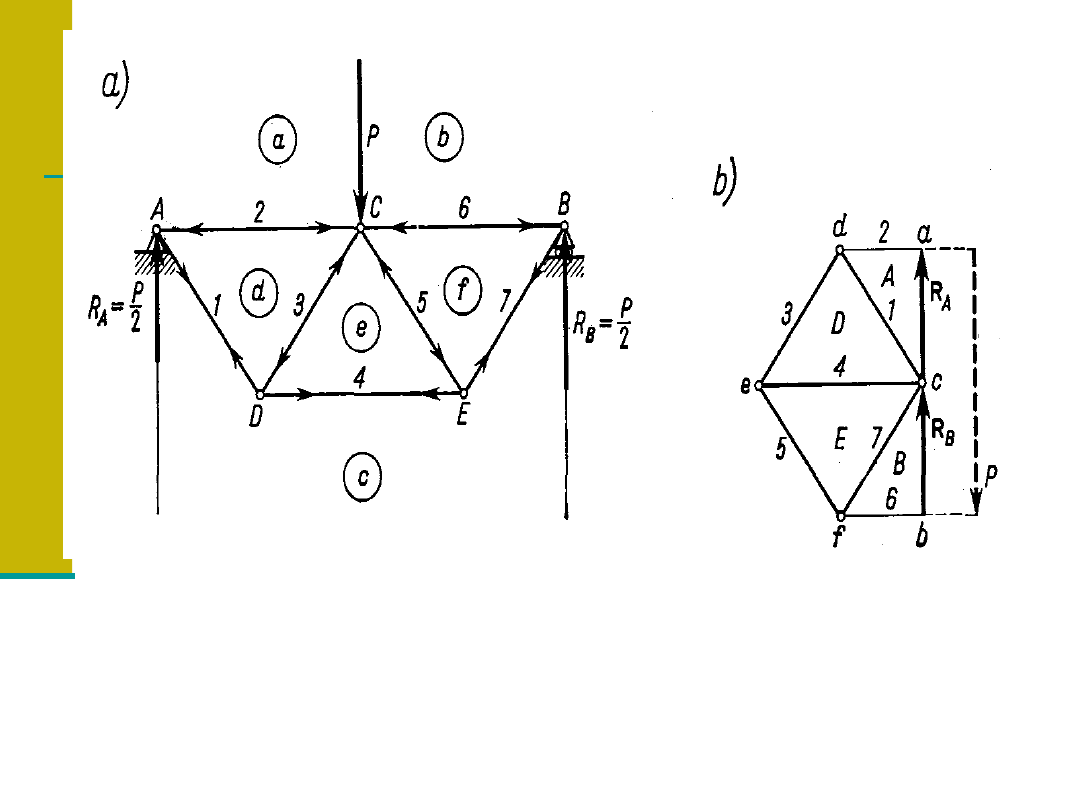
Plan sił Cremony dla kratownicy.
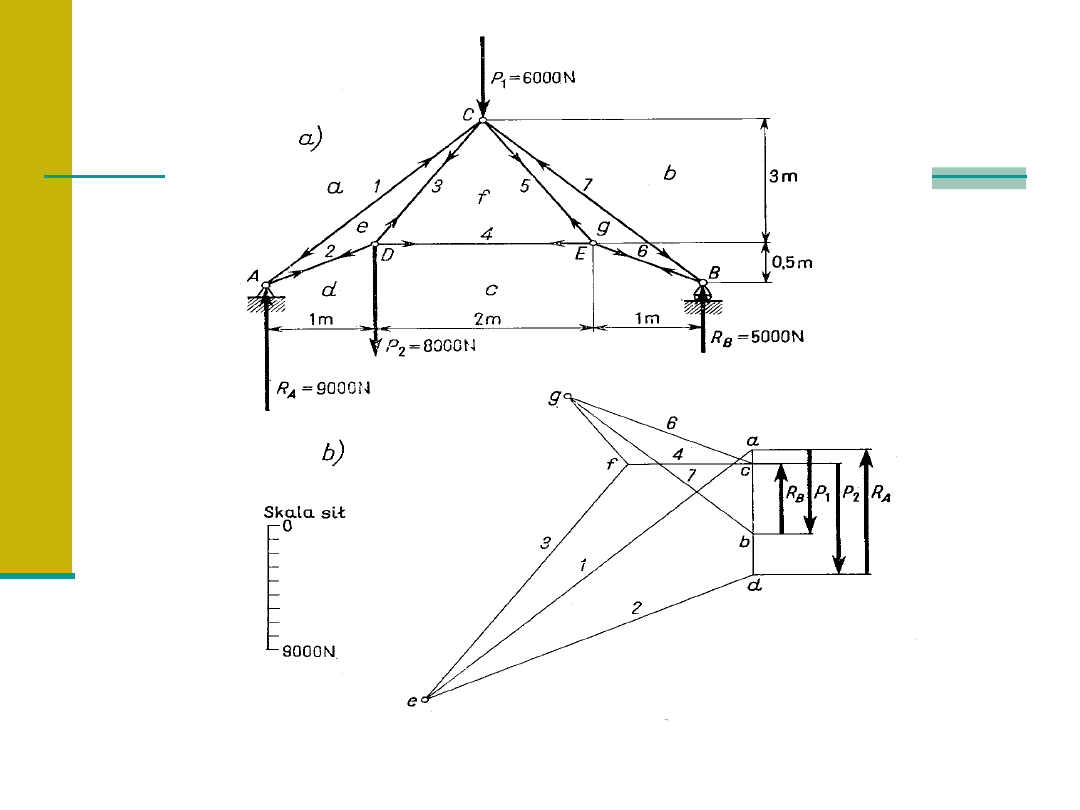
Plan sił Cremony dla kratownicy.

PYTANIA Z MECHANIKI TECHNICZNEJ
STATYKA
(część teoretyczna)
1.Podaj i omów trzy prawa Newtona.
2.Podaj i omów zasady statyki.
3.Omów stopnie swobody, więzy i reakcje (przykłady).
4.Pojęcie skalara i wektora (rodzaje wektorów).
5.Wektor w prawoskrętnym układzie kartezjańskim.
6.Dodawanie i mnożenie wektorów (zapis oraz ilustracja
graficzna).
7.Analityczne wyznaczanie wypadkowej przestrzennego
układu sił zbieżnych.
8.Równowaga płaskiego i przestrzennego układu sił
zbieżnych.
9.Moment siły względem punktu.
10.Moment siły względem dowolnego punktu w przestrzeni
( twierdzenie Varignona).
11.Wypadkowa dwóch sił równoległych zgodnie
skierowanych.
12.Para sił i moment pary sił.
13.Równoległe przesunięcie sił.
14.Redukcja płaskich układów sił.
15.Wyjaśnić pojęcie wektora i momentu głównego.
16.Redukcja płaskiego układu sił do jednej siły
wypadkowej-linia działania wypadkowej.
17.Omówić cztery przypadki redukcji płaskiego układu sił.
18.Równowaga dowolnego płaskiego układu sił.- trzy
sposoby zapisu.
19.Równowaga dowolnego przestrzennego układu sił.
20.Przestrzenny układ sił równoległych. Środek sił
równoległych.
21.Środek ciężkości brył - współrzędne.
22.Warunek statecznej wyznaczalności kratownic – przykłady
23.Rodzaje sił działających na kratownice.
24.Analityczne wyznaczanie sił działających na pręty w
kratownicy – omówienie przykładu.
25.Pojęcie prętów zerowych – przykłady.
26.Metoda graficzna wyznaczania sił w kratownicach –
omówienie przykładu.
27.Metoda Cremony, zasady i kolejność postępowania
(przykład).
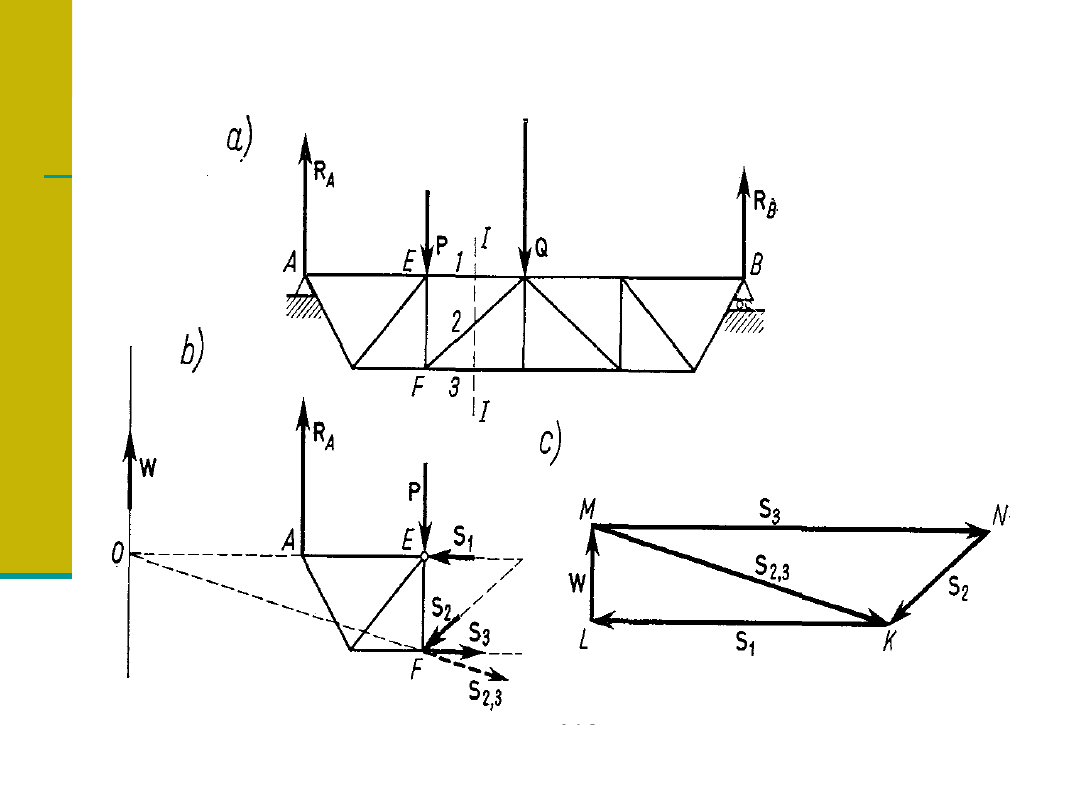
28.Metoda Rittera wyznaczania sił w kratownicach (przykład).
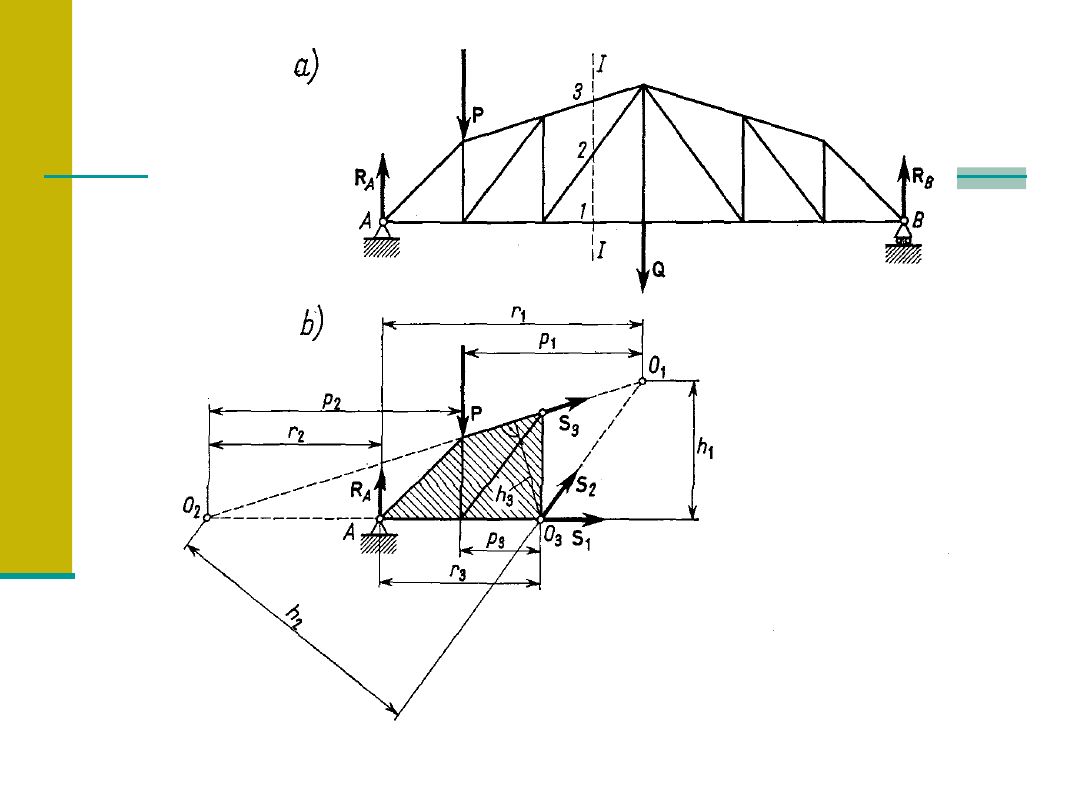
29.Metoda Culmana wyznaczania sił w kratownicach
(przykład).
30.Omów pojęcie tarcia ślizgowego.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
Wyszukiwarka
Podobne podstrony:
grunty - pytania, Prywatne, Budownictwo, Materiały, IV semestr, IV sem, Mechanika Gruntów, grunty eg
Mechanika Semest II pytania egz
zaliczenie - pytania i odp2, Politechnika Lubelska Wydział Mechaniczny, Semestr II, Podstawy Elektro
Podaj wzr na maksymalny wskanik porowatoci, Prywatne, Budownictwo, Materiały, IV semestr, IV sem, Me
Pytania egz.MIUT stacjon.I st s.6 2014-15, Pytania z Mechanizacji … ZiIP s
morawska - pytania z egz, Administracja UKSW II st nst 2010-2012, II semestr
pytania na teorie ogarnijtemat.com, SiMR inżynierskie, Semestr 3, Mechanika 2, EGZAMIN, Pytania
pytania z walbrzycha, PWR, ZiP Mechaniczny, 2 semestr, Ekologia, Kolokwium dr Wasiak, Kolokwium dr W
statystyka -pytania egz, SZKOŁA, semestr II, GWSH Statystyka
pytania i odp eko, PWR, ZiP Mechaniczny, 2 semestr, Ekologia, Kolokwium dr Wasiak, Kolokwium dr Wasi
sc, Prywatne, Budownictwo, Materiały, IV semestr, IV sem, Mechanika Gruntów, grunty egz
pytania - budownictwo 2010 1 80, Studia, 4 semestr, mechanika gruntów, pytania chłopaków
zaliczenie - pytania i odp1, Politechnika Lubelska Wydział Mechaniczny, Semestr II, Podstawy Elektro
Copy of Pytania z egz, Inżynieria Środowiska PW semestr I, chemia, sesja
więcej podobnych podstron