1
1
Dr inż. Edward Żak
POLITECHNIKA LUBELSKA
WYDZIAŁ ELEKTOTECHNIKI I INFORMATYKI
KATEDRA AUTOMATYKI I METROLOGII
ADAPTACYJNE ALGORYTMY REGULACJI
I ICH IMPLEMENTACJA

2
2
CECHY UKŁADÓW REGULACJI AUTOMATYCZNEJ
CECHY UKŁADÓW REGULACJI AUTOMATYCZNEJ
stabilna praca
odporność stabilności, tzn. niezależność stabilności
układu
regulacji od spełnienia założeń dotyczących struktury
modelu
obiektu, poczynionych na etapie syntezy regulatora
pożądane charakterystyki tłumienia zakłóceń
oddziałujących na
wielkość regulowaną
pożądane charakterystyki nadążania wielkości
regulowanej za
wartością zadaną
niewrażliwość wymienionych cech na nieuniknione
zmiany
właściwości dynamicznych obiektów regulacji
(niestacjonarność,
nieliniowość, zakłócenia losowe).

3
3
Regulator adaptacyjny
Regulator adaptacyjny
(algorytm regulacji
(algorytm regulacji
adaptacyjnej)
adaptacyjnej)
może rozwiązać problemy, które
może rozwiązać problemy, które
układ regulacji z klasycznym, stałym
układ regulacji z klasycznym, stałym
sprzężeniem zwrotnym nie jest w stanie
sprzężeniem zwrotnym nie jest w stanie
rozwiązać
rozwiązać
np. w przypadku
strojenia regulatorów, które jest procedurą
czasochłonną, przeprowadzaną zazwyczaj metodą „prób
i błędów”
i wymagającą wykwalifikowanego personelu
obiektów wielowymiarowych „eksploatowanych w
szerokich granicach”, czyli w sytuacji, w której więcej
niż kilka parametrów zasadniczo zmienia się
- w czasie (niestacjonarność)
- „po wartości” (nieliniowość)
pod wpływem zakłóceń i (lub) warunków przebiegu
procesu (reżim, punkt pracy, starzenie,…)

4
4
Definicje adaptacji (regulacji a., regulatora a.)
Definicje adaptacji (regulacji a., regulatora a.)
Wg. słownika Webstera, „adaptować” oznacza:
”zmieniać (się) w taki sposób, aby dostosować swoje
zachowanie do nowych lub zmienionych okoliczności”.
W 1961 r. na jednej z konferencji padło
stwierdzenie, że "system adaptacyjny jest jakimś
fizycznym systemem, który został zaprojektowany z
przystosowującym się punktem widzenia" !!?.
Biorąc pod uwagę wiele definicji i intuicję można
przyjąć, że
"adaptacja"
to zmiana zachowania w celu
przystosowania się do nowych potrzeb i otoczenia.
Regulator adaptacyjny
jest sterownikiem, który może
modyfikować swoje zachowanie w odpowiedzi na zmieniającą
dynamikę procesu i charakter zakłócenia
.
Istota
regulacji adaptacyjnej
polega na automatycznym
dopasowaniu parametrów regulatora do zmieniających się
właściwości obiektu regulacji i jego otoczenia aby zwiększyć
odporność na zaistniałe zmiany.

5
5
Klasyfikacja układów regulacji adaptacyjnej
Klasyfikacja układów regulacji adaptacyjnej
1.
1.
Dualne
Dualne
2.
2.
Niedualne
Niedualne
z programowalnymi zmianami parametrów regulatora
(Gain Scheduling - GS)
z identyfikacją modelu, z tzw. regulatorem
samostrojącym
(Self-Tuning Regulator -STR)
z modelem odniesienia
(Model Reference Adaptive Control-MRAC)

6
6
Struktury układów regulacji adaptacyjnej
Struktury układów regulacji adaptacyjnej
7
7
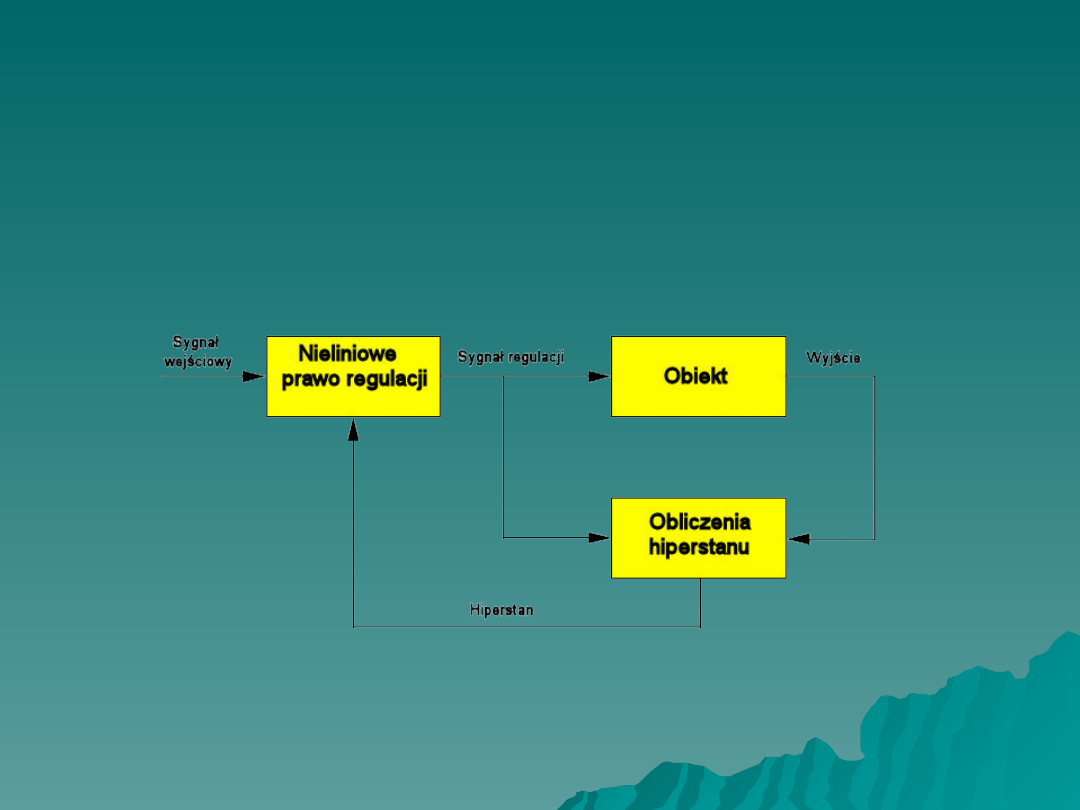
Dualne układy adaptacyjne (
Dualne układy adaptacyjne (
dual control - DC
dual control - DC
)
)
(z regulatorem stochastycznym)
(z regulatorem stochastycznym)

8
8
Dualne układy adaptacyjne (
Dualne układy adaptacyjne (
dual control
dual control
)
)
Równowaga pomiędzy utrzymaniem dobrego poziomu
Równowaga pomiędzy utrzymaniem dobrego poziomu
regulacji
regulacji
a małymi błędami estymacji
a małymi błędami estymacji
Wykorzystanie twierdzenia Bellmana do obliczenia
Wykorzystanie twierdzenia Bellmana do obliczenia
hiperstanu (programowanie dynamiczne)
hiperstanu (programowanie dynamiczne)
Skomplikowane obliczenia hiperstanu wykluczające
Skomplikowane obliczenia hiperstanu wykluczające
zastosowanie tego rozwiązania dla obiektów o
zastosowanie tego rozwiązania dla obiektów o
skomplikowanej dynamice
skomplikowanej dynamice
9
9
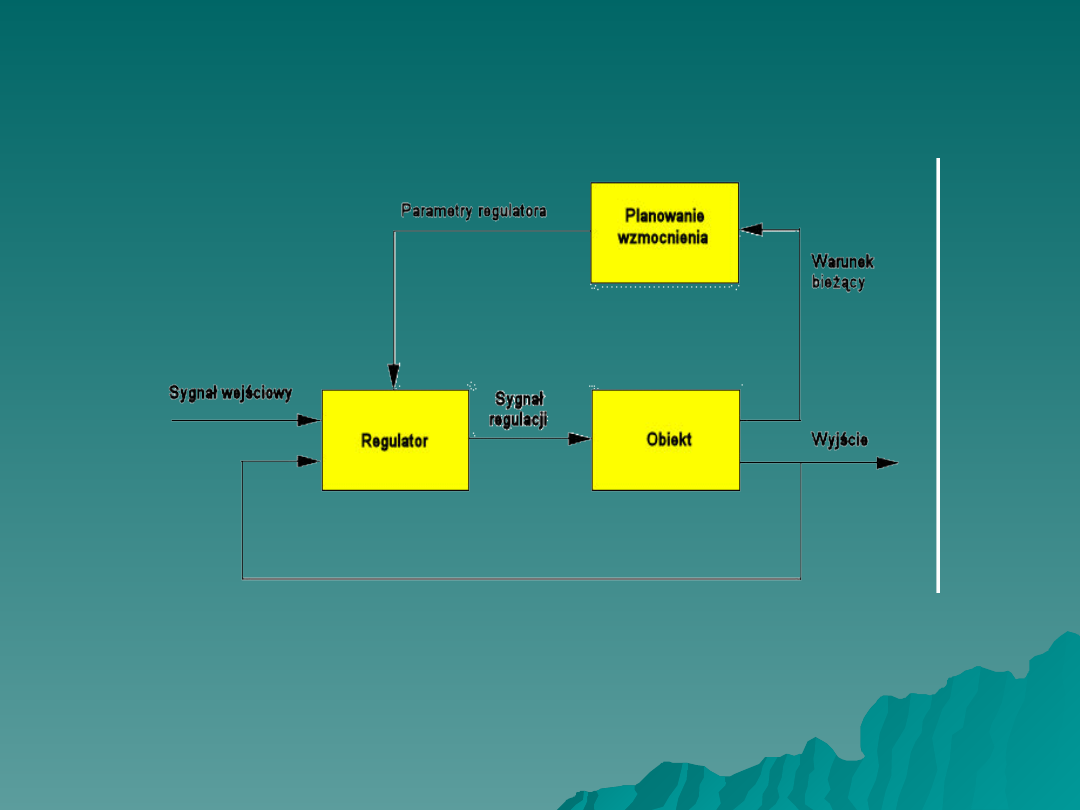
Programowa zmiana parametrów
Programowa zmiana parametrów
(GS)
(GS)

10
10
Programowa zmiana parametrów
Programowa zmiana parametrów
Zaleta:
Zaleta:
Szybka zmiana parametrów. Nawet tak szybka jak
Szybka zmiana parametrów. Nawet tak szybka jak
zmiana pomiarów pomocniczych
zmiana pomiarów pomocniczych
Wada:
Wada:
Układ adaptacyjny z otwartą pętlą, bez żadnego
Układ adaptacyjny z otwartą pętlą, bez żadnego
schematu nauki, pracochłonny w realizacji
schematu nauki, pracochłonny w realizacji
11
11
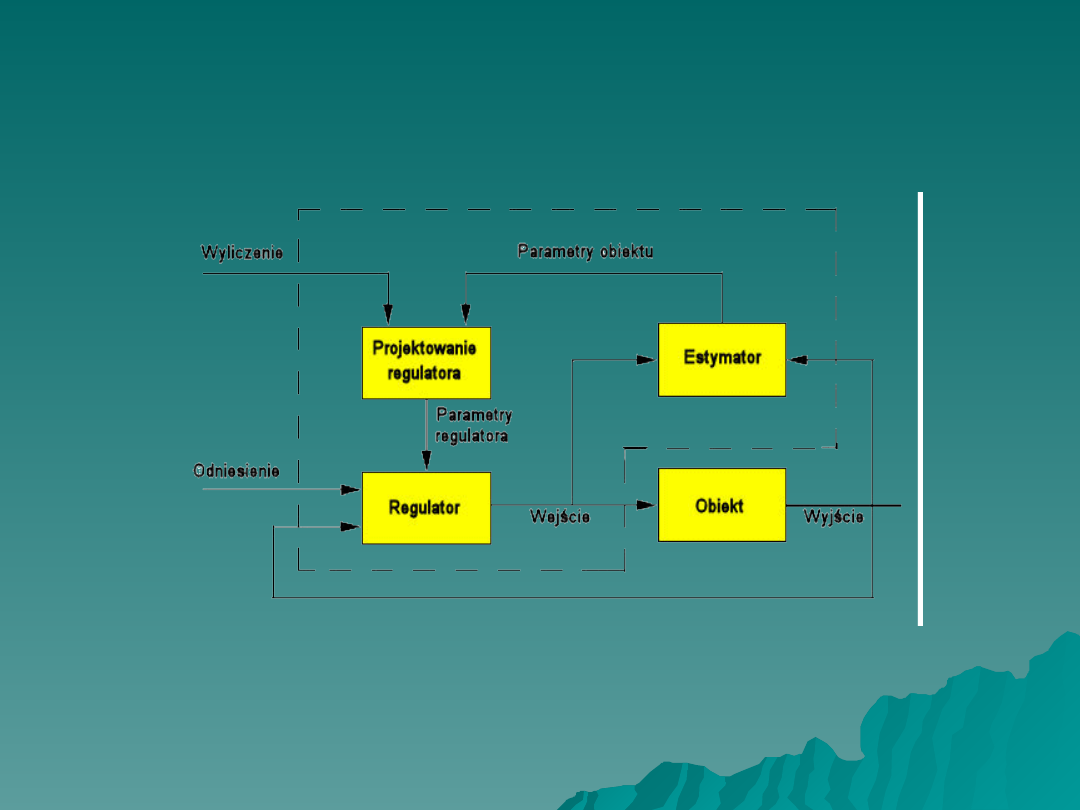
Adaptacyjny układ regulacji z regulatorem
Adaptacyjny układ regulacji z regulatorem
samostrojącym (
samostrojącym (
STR
STR
)
)

12
12
Adaptacyjny układ regulacji (
Adaptacyjny układ regulacji (
STR
STR
)
)
Metody identyfikacji procesu:
Metody identyfikacji procesu:
Metoda maksymalnego prawdopodobieństwa
Metoda maksymalnego prawdopodobieństwa
Metoda najmniejszych kwadratów (
Metoda najmniejszych kwadratów (
Least Squares
Least Squares
)
)
Zmiennej instumentalnej, i inne modyfikacje rekurencyjnej
Zmiennej instumentalnej, i inne modyfikacje rekurencyjnej
metody LS
metody LS
Rozszerzona filtracja Kallmana
Rozszerzona filtracja Kallmana
Synteza regulatora:
Synteza regulatora:
Regulator
Regulator
PID (nastawy Z-N, CC,…)
PID (nastawy Z-N, CC,…)
Regulator liniowo - kwadratowy (
Regulator liniowo - kwadratowy (
LQG
LQG
)
)
Regulator minimalnowariancyjny
Regulator minimalnowariancyjny
Lokowanie biegunów
Lokowanie biegunów
(np. DB)
(np. DB)
13
13
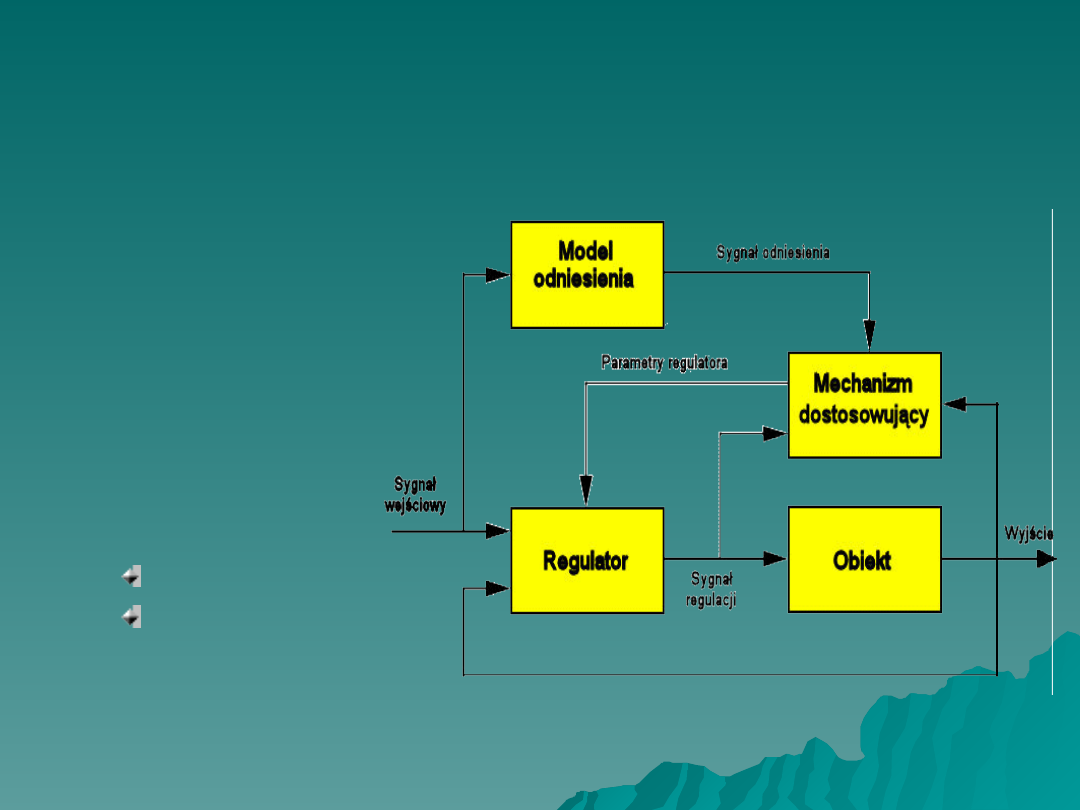
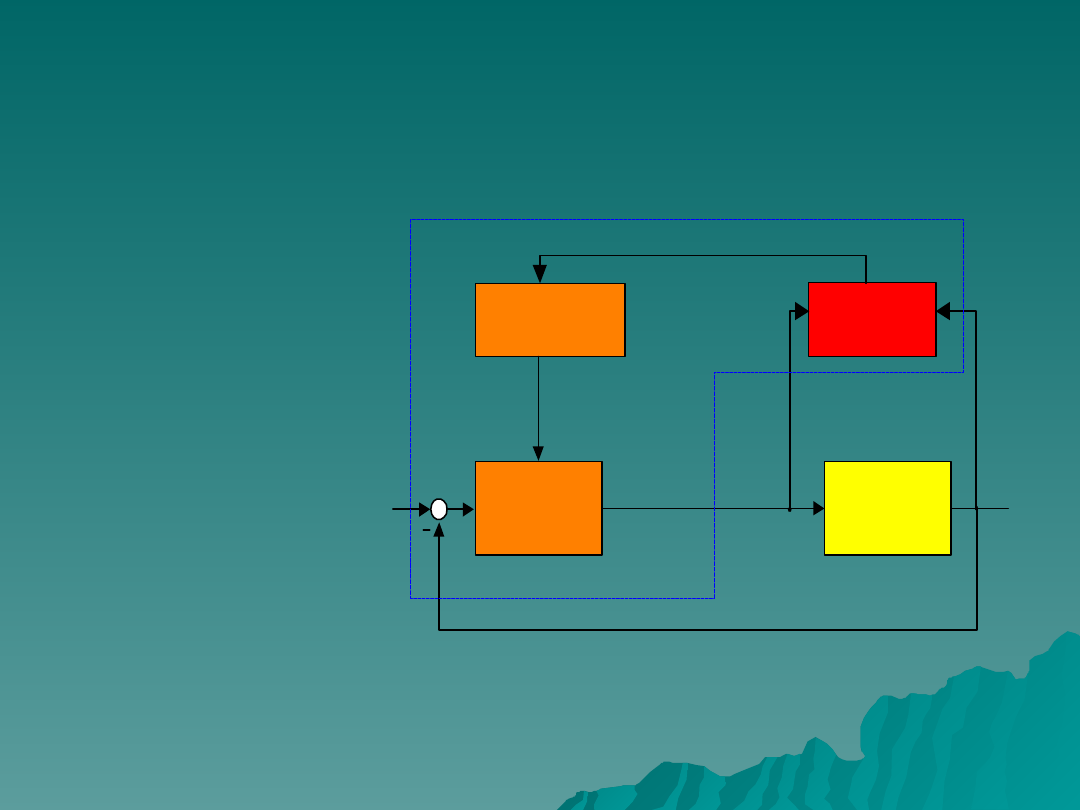
Adaptacyjny układ regulacji z modelem
Adaptacyjny układ regulacji z modelem
odniesienia (
odniesienia (
MRAC
MRAC
)
)
Zastosowanie
Zastosowanie
modelu odniesienia
modelu odniesienia
jako wzorca
jako wzorca
zachowania układu
zachowania układu
Metody doboru
Metody doboru
członu nastaw
członu nastaw
regulatora:
regulatora:
Reguła MIT
Reguła MIT
Wg. teorii
Wg. teorii
Lapunova
Lapunova
14
14
Reguła
Reguła
MIT
MIT
(
(
gradientowa)
gradientowa)
Wskaźnik jakości adaptacji
Wskaźnik jakości adaptacji
Mechanizm zmian
Mechanizm zmian
parametrów
parametrów
Pochodna czułości
Pochodna czułości
2
2
1
)
(
e
J
e
e
J
dt
d
15
15
P ro je k to w a n ie
m e to d ą M D P P
W y z n a c z a n ie
s y g n a lu
s te ru ją c e g o
O b ie k t
re g u la c ji
P a r a m e tr y
r e g u la to r a
W a r to ś ć
z a d a n a
S y g n a ł
s te ro w a n ia
W y jś c ie
E s ty m a c ja
R L S
O c e n a p a r a m e tr ó w
S a m o s tr o ją c y s ię
r e g u la to r
STR
STR
W projektowanym
regulatorze
adaptacyjnym
algorytm
estymacji oparto o
metodę
Rekurencyjną
Najmniejszych
Kwadratów (RLS–
Recursive Least
Squares), a prawo
regulacji
wyznaczono
metodą lokowania
biegunów (MDPP
– Minimal Degrees
Pole Placement)
16
16
Model obiektu
)
i
(
e
)
d
i
(
u
)
1
z
(
B
)
i
(
y
)
1
z
(
A
Rekurencyjna metoda estymacji RELS:
)
1
i
(
)
1
i
(
P
)
1
i
(
T
)
1
i
(
P
)
1
i
(
T
)
1
i
(
)
1
i
(
P
)
1
i
(
P
1
)
i
(
P
)
1
i
(
)
1
i
(
P
)
1
i
(
T
(
)
1
i
(
)
1
i
(
P
)
i
(
K
)
1
i
(
ˆ
)
1
i
(
T
)
i
(
y
)
i
(
ˆ
ˆ
K(i)
ε(i)
1)
(i
θ
(i)
θ
BS
AR
A
c
)
i
(
y
)
z
(
S
)
i
(
u
)
z
(
T
)
i
(
u
)
z
(
R
1
c
1
1
Algorytm regulacji
MDPP:
uzyskuje się po rozwiązaniu równania diofantycznego:
17
17
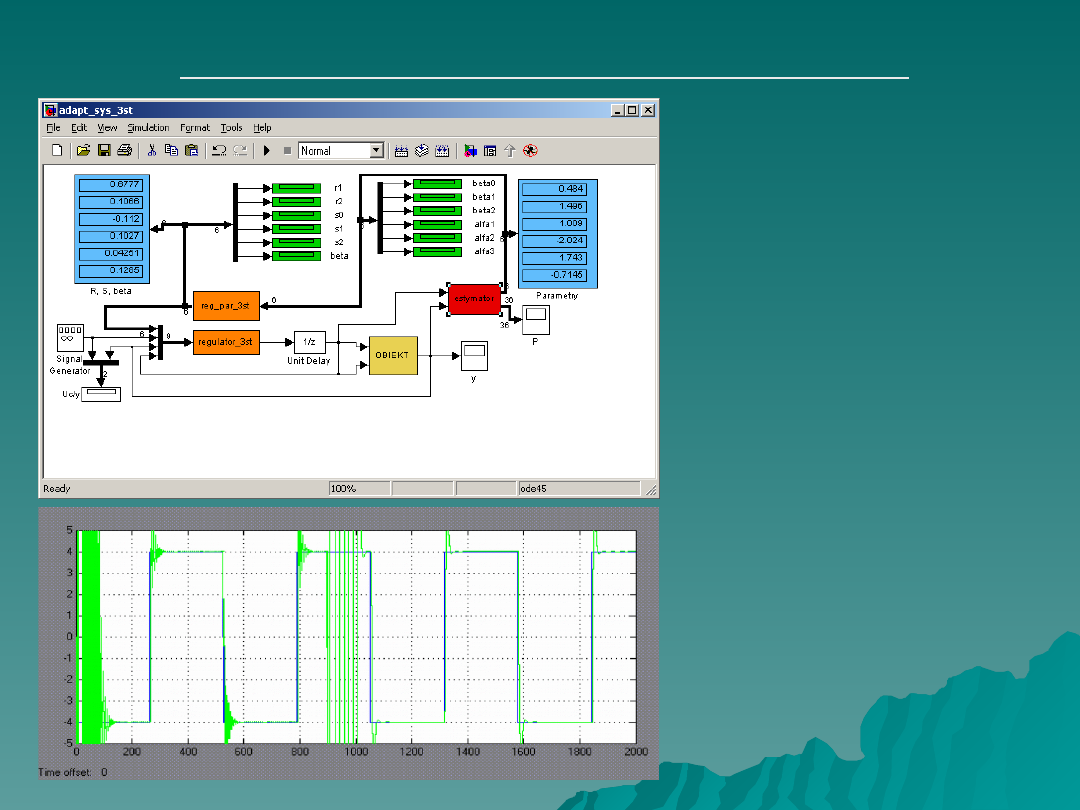
STR – Schemat i przebiegi symulacji
Schemat blokowy
układu regulacji
adaptacyjnej STR
zrealizowany w
SIMULINKU –
metoda (RELS),
proces 3-go rzędu
Odpowiedź układu dla =0.96
przy zmianie dynamiki procesu
18
18
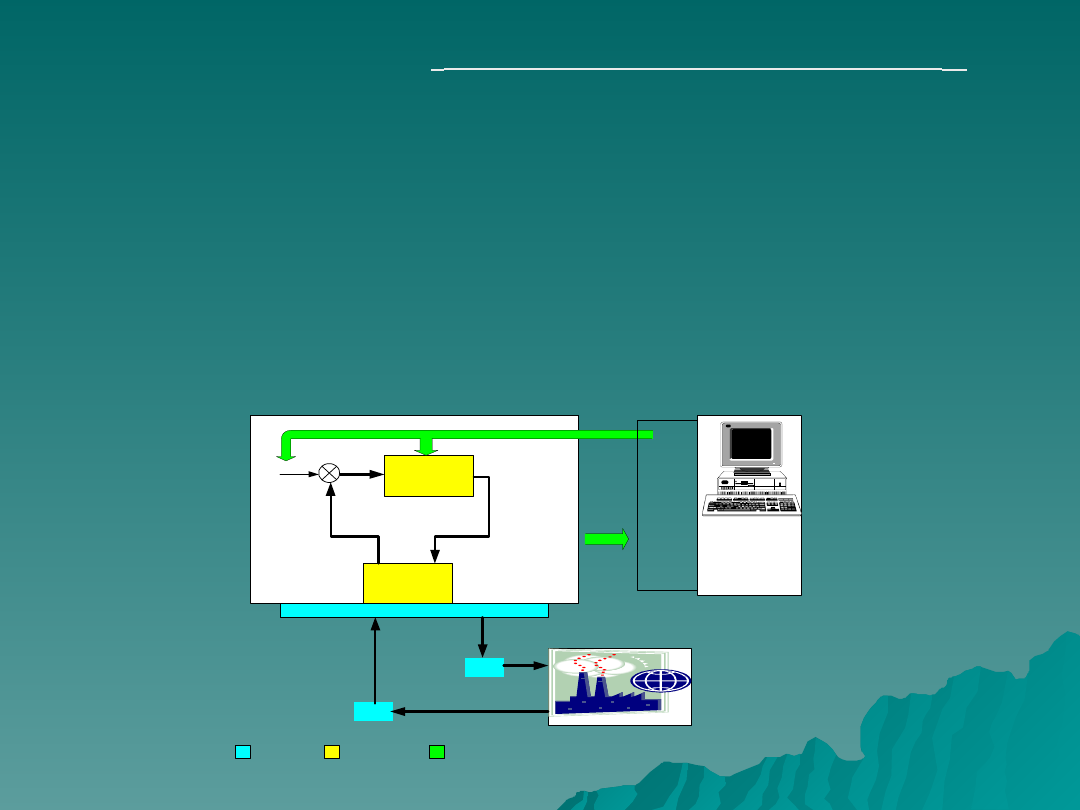
Implementacja w PC z wykorzystaniem
narzędzi CACSD
(Computer Aided Control Systems Dising)
Współcześnie w projektowaniu systemów automatyki coraz
powszechniejsze staje się wykorzystywanie zintegrowanych
narzędzi komputerowego wspomagania projektowania,
pracujących on-line w czasie rzeczywistym. Kluczową cechą
jest możliwość automatycznego generowania kodu w języku C
na podstawie modeli np. w Simulinku czy też LabView,
kompilację algorytmu (EXE, DLL) i jego wykonywanie w
różnych środowiskach programowo-sprzętowych.
C A C S D :
M A T L A B /
S IM U L IN K
R E G U L A T O R
S T E R O W N IK I
U R Z Ą D Z E Ń
W E / W Y
IN T E R F E J S
b u f o r
P R O C E S
C / A
A /C
s t e r o w a n i e
d a n e
s tr o je n i e
p a r a m e tr ó w
R T K
- u r z ą d z e n i a
- z a d a n i a c z a s u
r z e c z y w i s te g o
- tr y b " O n - L i n e "
z c z u jn i k ó w
CACSD jako nadzorca regulatora czasu
rzeczywistego
19
19
PC
Advantech
PCL-812PG
wyjście AO
Źródło
sygnału u
c
y
u
0
u
c
Przesuwnik
poziomu
napięcia
u
Obiekt
sterowania
1. wejście AI
2. wejście AI
Schemat ideowy układu regulacji
1. PC-
MRAC_aprox
2. PC-MRAC
Aplikacje MRAC zrealizowane w LabVIEW
Aplikacje MRAC zrealizowane w LabVIEW
20
20
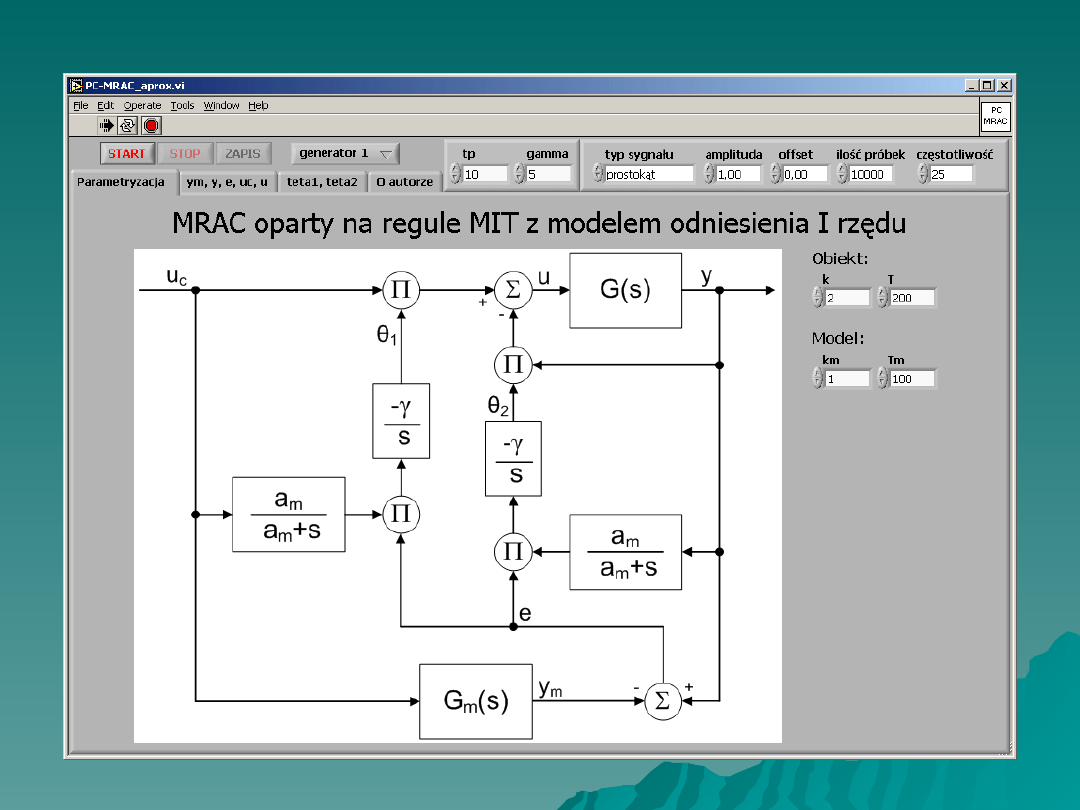
Aplikacje MRAC zrealizowane w LabVIEW
Aplikacje MRAC zrealizowane w LabVIEW
PC-MRAC_aprox
21
21
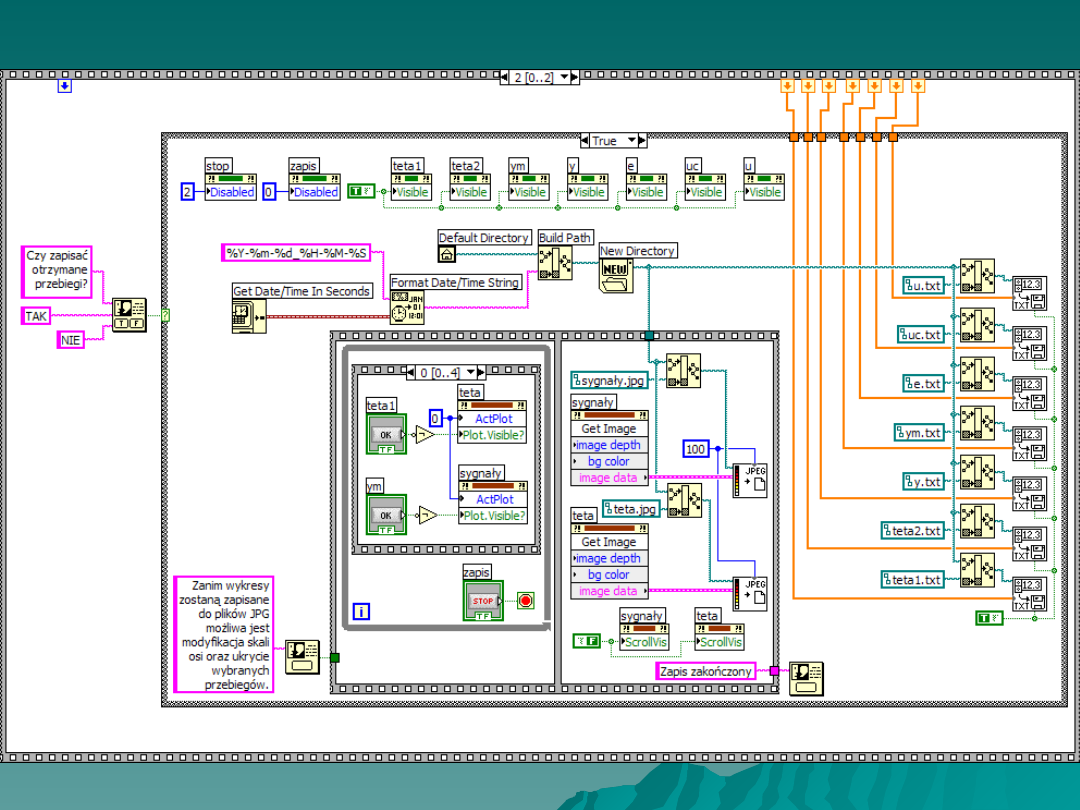
Aplikacje zrealizowane w LabVIEW
Aplikacje zrealizowane w LabVIEW
PC-MRAC_aprox –
jedna z klatek
22
22
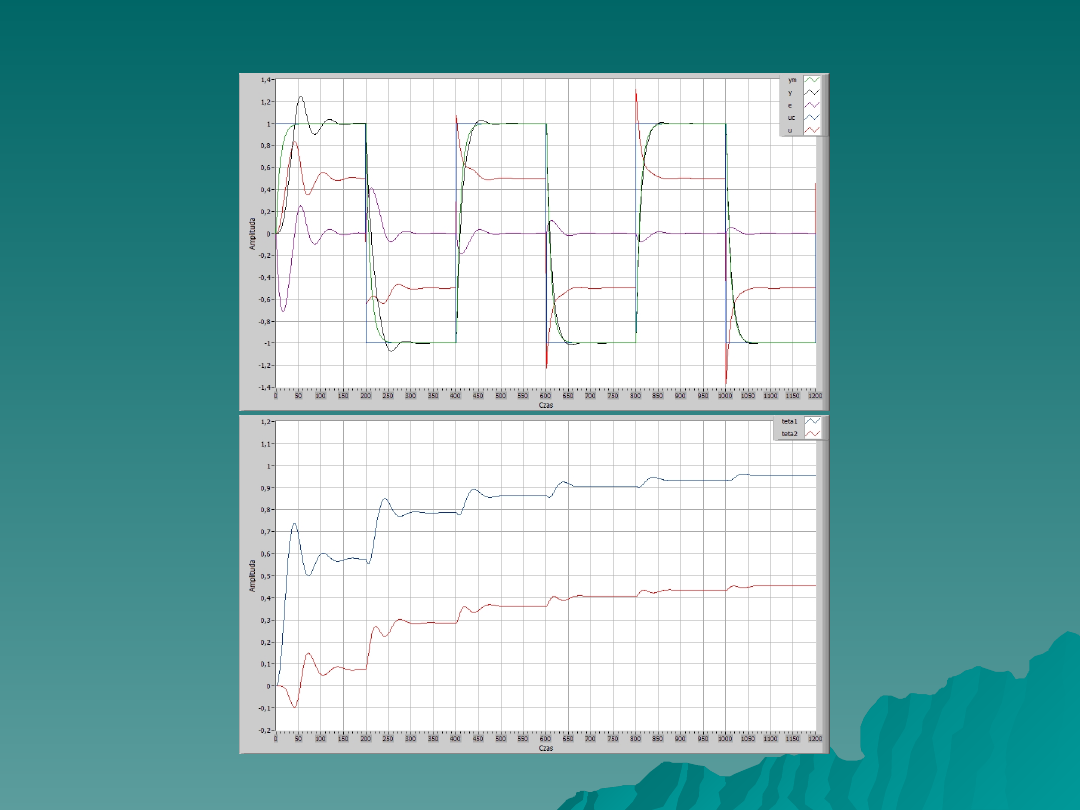
Aplikacje zrealizowane w LabVIEW
Aplikacje zrealizowane w LabVIEW
Wyniki symulacji
23
23
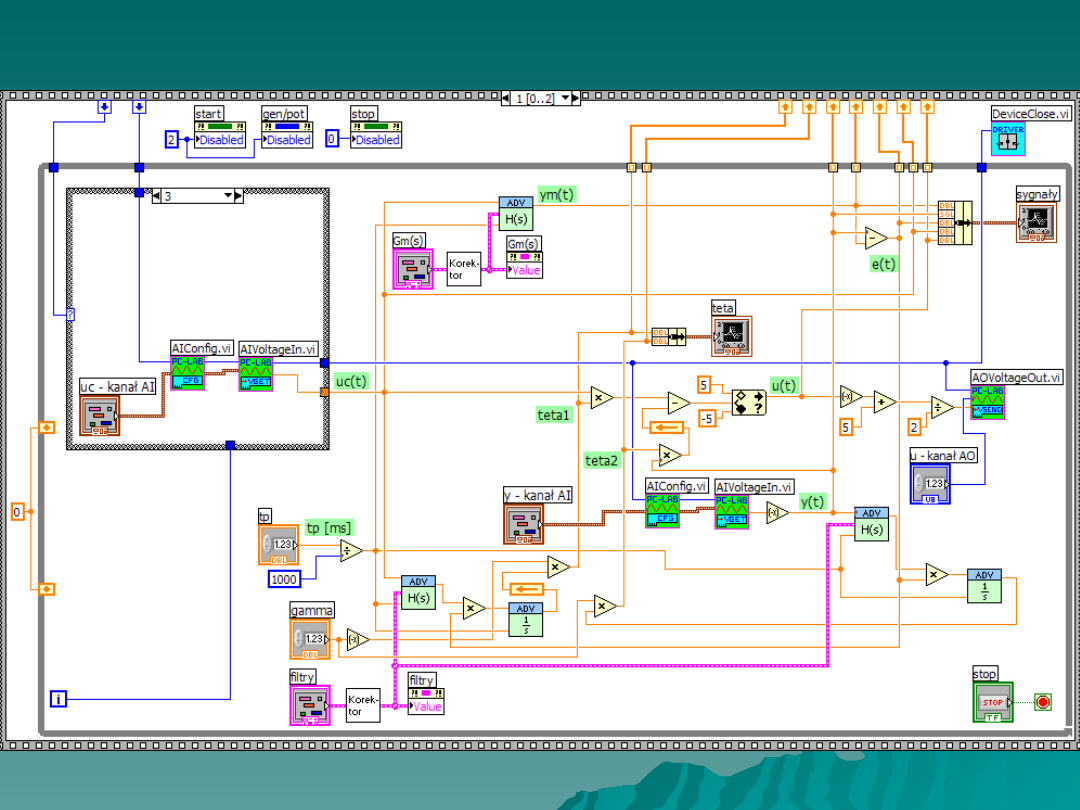
Aplikacje zrealizowane w LabVIEW
Aplikacje zrealizowane w LabVIEW
PC-MRAC
(z PID Control Toolset)–
druga klatka
24
24
Wyniki regulacji fizycznego obiektu
Wyniki regulacji fizycznego obiektu
sterowania
sterowania
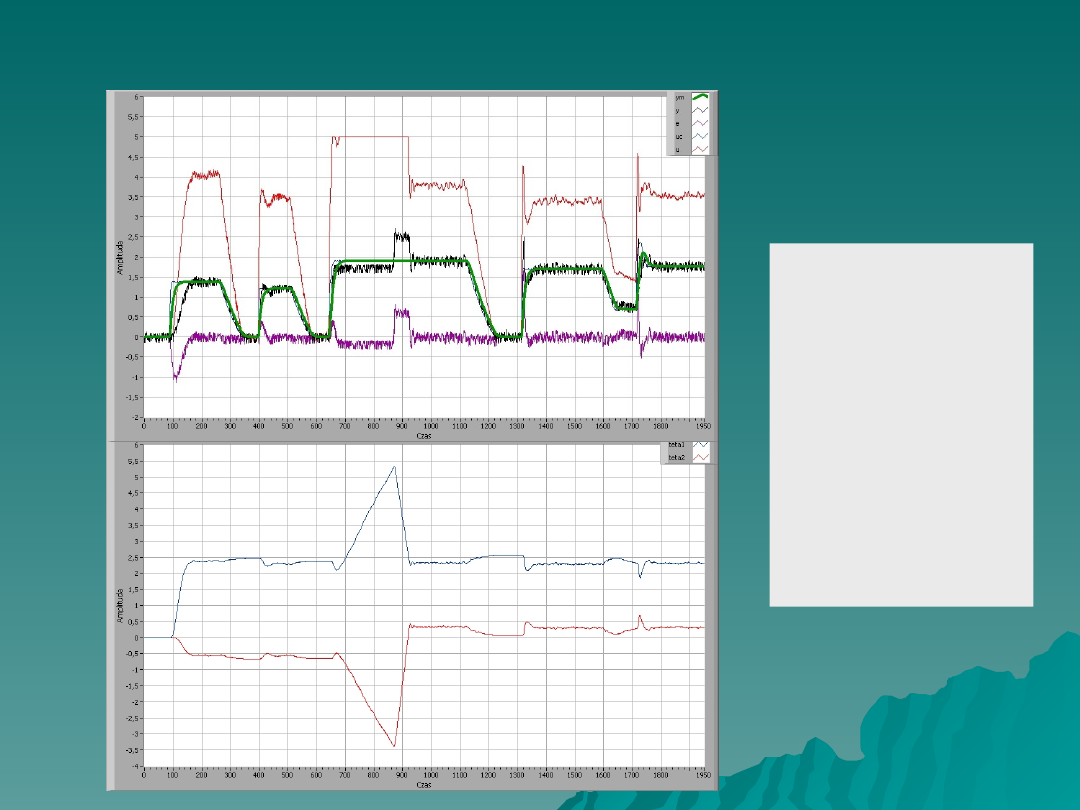
25
25
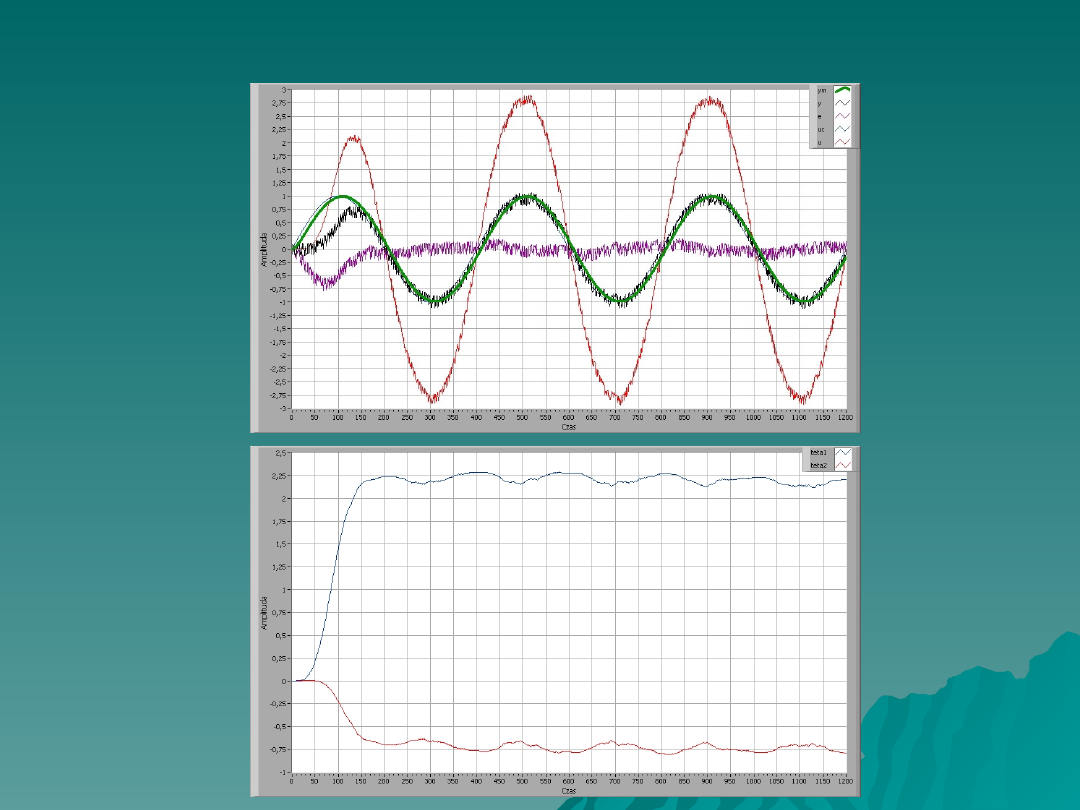
Wyniki regulacji fizycznego obiektu
Wyniki regulacji fizycznego obiektu
sterowania
sterowania
Przebiegi
sygnałów i
parametrów
algorytmu
regulacji
Zmiana punku
pracy i
wzmocnienia
obiektu

26
26
Podsumowanie
Podsumowanie
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
Wyszukiwarka
Podobne podstrony:
kraszanki, ortofrajda
Pisanki, kraszanki, jajka malowane 2
Wielkanocne pisanki, kraszanki
Pisanki, kraszanki, i inne
Pisanki, kraszanki
Pisanki, kraszanki, jajka malowane
Pisanki, kraszanki
pisanki kraszanki scenariusz zajęć
więcej podobnych podstron