Równowaga sił w
układzie mięśniowo
szkieletowym człowieka
w warunkach statyki
Warszawa, 19 października
2007

Mechanika
• 1) Dział fizyki zajmujący się badaniem
równowagi, ruchu i oddziaływania ciał
• Siły są miarą oddziaływania ciał
• 1N jest to siła, która działając na ciało o
masie 1kg nadaje mu przyspieszenie 1
m/s
2
• 2) Nauka o budowie, działaniu i
konstruowaniu maszyn oraz mechanizmów

Mechanika
• Z gr. Mechaniké ‘sztuka budowania maszyn’ od mechané
‘maszyna’
• M. klasyczna – mechanika oparta na teorii Newtona,
badająca ruch makroskopowych ciał materialnych
• M. relatywistyczna – mechanika uwzględniająca w swoich
badaniach elementy wynikające z teorii względności
• M. kwantowa
• M. płynów
• M. nieba – dział astronomii badający ruch ciał niebieskich
• M. techniczna dział nauki zajmujący się konstruowaniem i
budowaniem maszyn, mechanizmów, aparatów

Prekursorzy
• Mechanika jako nauka ścisła powstała w
Egipcie w IV w p.n.e.
• Arystoteles (384-322 p.n.e.), Archytas z
Tarentu – maszyny proste
• Archimedes (287-212 p.n.e.) siły
równoległe teoria dźwigni
• Mikołaj Kopernik (1473-1543) układy
odniesienia
• Isaak Newton (1642-1727) Philosophiae
naturalis principia mathematica. 1687,
Londyn – podstawy mechaniki klasycznej
opartej na faktach doświadczalnych, prawa
powszechnego ciążenia i klasycznej
dynamiki

Mechanika Techniczna
• Mechanika techniczna:
»Mechanika ogólna (teoretyczna)
»Wytrzymałość
• Mechanika ogólna zajmuje się
ustalaniem ogólnych praw ruchu i
równowagi ciał materialnych oraz
zastosowaniem tych praw do pewnych
wyidealizowanych schematów ciał
materialnych: punktu materialnego,
ciała doskonale sztywnego

Mechanika ogólna
• Mechanika
ogólna dzieli się na:
– Kinematykę
(badanie ruchu bez wnikania w
jego przyczyny, bez uwzględniania działających
sił)
– Dynamikę
(badanie działających sił), która
dzieli się na:
•Statykę: zajmuje się badaniem
równowagi sił
•Kinetykę: bada ruch ciał oraz siły
wywołujące go

Kinematyka
•a – stałe przyspieszenie
•V(t) = v
0
+ at
•X(t) = x
0
+ v
0
t + ½at
2
II zasada dynamiki Newtona
m
F
a

Zmiana pędu
•Π = Δp
•Popęd siły = Przyrost pędu
•Popęd siły to pole pod
krzywą siły zmieniającej się w
czasie (całka)
•Pęd = mv
Zasady statyki (aksjomaty)
• Zasada równoległoboku: Działanie dwóch sił F
1
i F
2
można zastąpić działaniem jednej siły R
• Jeżeli do ciała przyłożone są dwie siły to równoważą się
one tylko wtedy, gdy mają tę samą linię działania, te
same wartości i przeciwne zwroty
• Skutek działania dowolnego układu sił przyłożonego do
ciała nie zmieni się jeżeli dodamy lub odejmiemy
dowolny układ sił równoważących się (układ zerowy)
• Jeżeli ciało odkształcalne znajduje się w równowadze pod
działaniem pewnego układu sił, to również pozostanie w
równowadze ciało doskonale sztywne (nieodkształcalne)
identyczne z poprzednim, pod działaniem tego samego
układu sił.
• Każdemu działaniu towarzyszy równe co do wartości o
przeciwnym zwrocie i leżące na tej samej prostej
przeciwdziałanie.
• Każde ciało nieswobodne można myślowo oswobodzić z
więzów, zastępując ich działanie reakcjami, a następnie
rozpatrywać jako ciało swobodne, znajdujące się pod
działaniem sił czynnych i biernych

Ruch
• Ruch – wzajemne przemieszczanie
się w przestrzeni, w miarę upływu
czasu jednych ciał względem innych
• Ruch jest względny
• Układ współrzędnych związany z
ciałem lub zbiorem ciał, względem
których opisujemy ruch innego ciała
nazywamy układem odniesienia

Modele, pojęcia podstawowe
• Opisując zjawiska fizyczne posługujemy się
modelami:
• Punkt materialny – ciało którego wymiary można
pominąć w opisie ruchu
• Bryła sztywna – zbiór wielkiej liczby punktów
materialnych znajdujących się w stałej niezmiennej
odległości
• Tor ruchu – linia krzywa lub prosta po której odbywa
się ruch
• Droga s – długość toru (skalar)
• Δr – przemieszczenie (wektor)
• W postaci wektorowej kinematyczne równanie ruchu
jest zależnością określającą wektor położenia ciała
jako funkcję czasu r = r(t); r = xi + yi + zj
• Eliminując czas otrzymujemy równanie toru

Siła bezwładności
•B = - am
• Siły B są wywołane przyspieszeniem układu
odniesienia a nie oddziaływaniem między ciałami
• Siły B działają na ciała tylko w nieinercjalnych
układach odniesienia
• Siły B zależą od masy, zawsze przeciwne do
przyspieszenia nieinercjalnego układu odniesienia
• Dla dowolnego układu ciał w nieinercjalnym
układzie odniesienia Siły B są siłami
zewnętrznymi dlatego nie są zachowane w tych
układach zasada zachowania energii i pędu
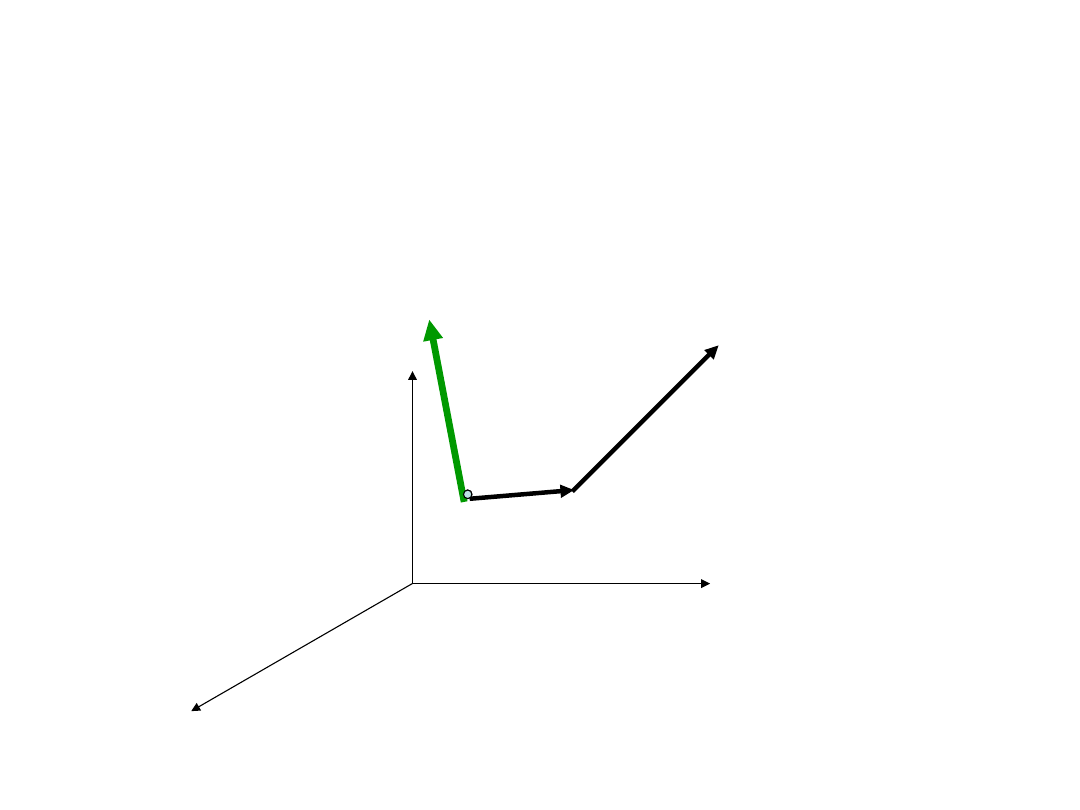
Moment siły
• Momentem siły F względem punktu 0
nazywamy odłożony z punktu 0
wektor M
0
równy iloczynowi
wektorowemu promienia wektora r i
wektora siły F ; M
0
= r×F
y
y
x
z
0
F
r
M
0
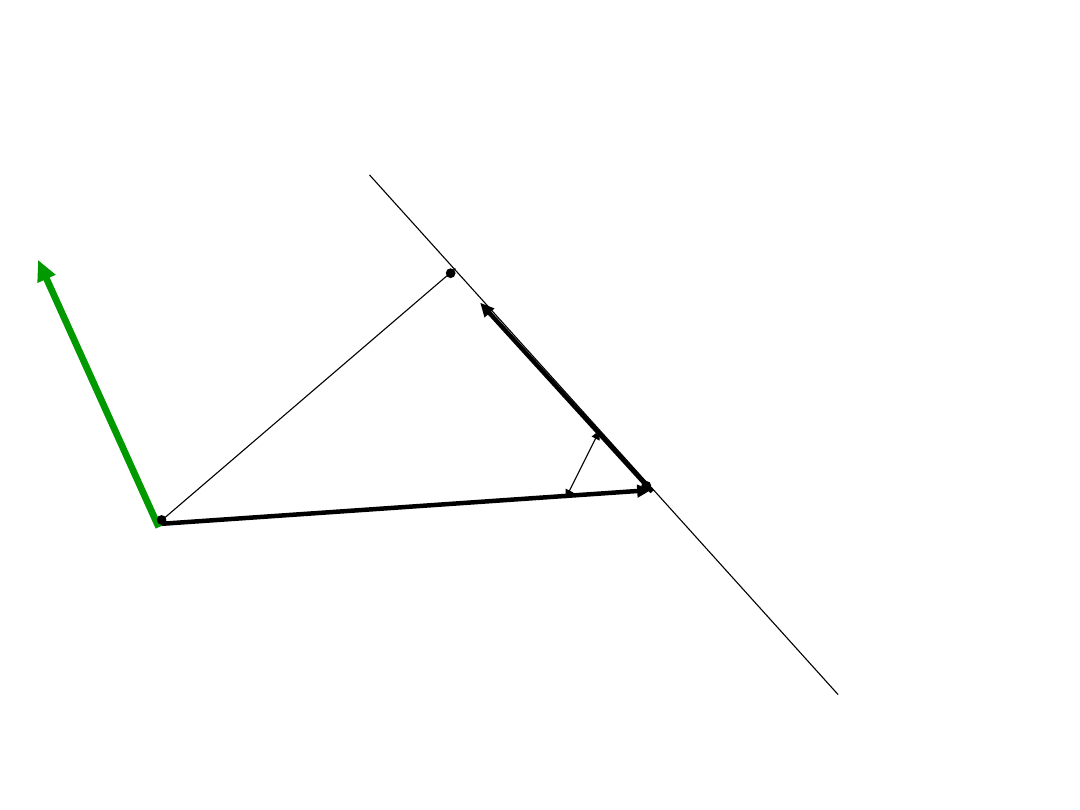
Moment siły
r
F
B
A
l
M
0
0
M
0
= Frsinα =
Fl
α
l – ramię działania siły

Redukcja dowolnego przestrzennego
układu sił
• Załóżmy, że na ciało sztywne działa dowolny
przestrzenny układ n sił F
i
przyłożonych w
różnych punktach przestrzenia. Aby ten układ
zredukować przyjmujemy dowolny punkt 0
zwany środkiem redukcji układu sił
• Korzystając z równoległego przesunięcia
otrzymujemy układ sił zbieżnych przyłożonych
do punktu 0 oraz n par sił o momentach M
i0
• Układ sił zbieżnych zastępujemy:
n
i
i
F
R
1
i
n
i
i
F
r
M
1
0

Równowaga przestrzennego
układu sił
• Przestrzenny układ n sił jest w równowadze,
jeżeli jego suma geometryczna R jest
równa zeru oraz moment M
0
od tych sił
względem dowolnego punktu 0 jest równy
zero
0
1
n
i
i
F
R
0
1
0
i
n
i
i
F
r
M

Równowaga przestrzennego
układu sił
• Dowolny przestrzenny układ sił F
i
jest w
równowadze, jeżeli suma rzutów wszystkich sił
na trzy osie układu równa jest zeru i suma
momentów sił względem trzech osi układu jest
równa zeru
n
i
iz
M
1
0
n
i
ix
M
1
0
n
i
iy
F
1
0
n
i
ix
F
1
0
n
i
iz
F
1
0
n
i
iy
M
1
0
Równowaga płaskiego układu
sił
• Płaski dowolny układ sił znajduje się w
równowadze, jeżeli sumy rzutów
wszystkich sił na osie układu są równe
zeru i moment wszystkich sił względem
dowolnego punktu płaszczyzny działania
sił jest równy zeru
n
i
ix
F
1
0
n
i
iy
F
1
0
n
i
i
M
1
0
0
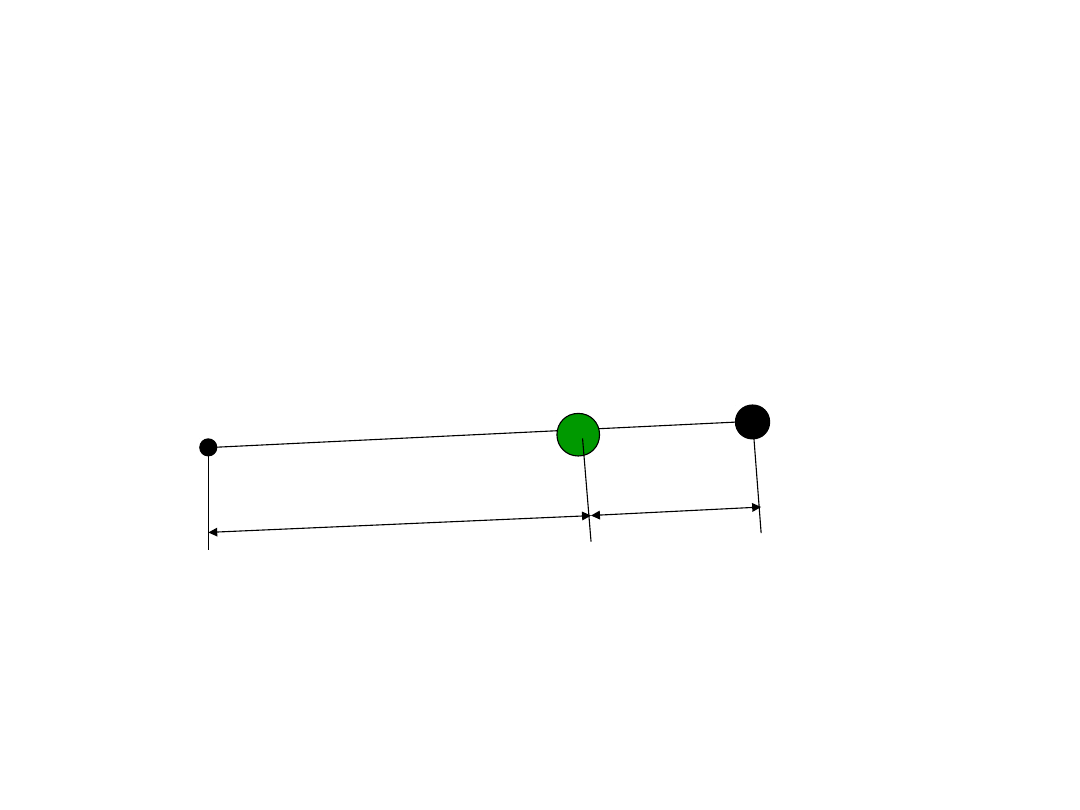
Środek masy (Środek
ciężkości)
• Środek masy dwóch punktów
materialnych
m
A
m
B
a
b
m
A
a =
m
B
b
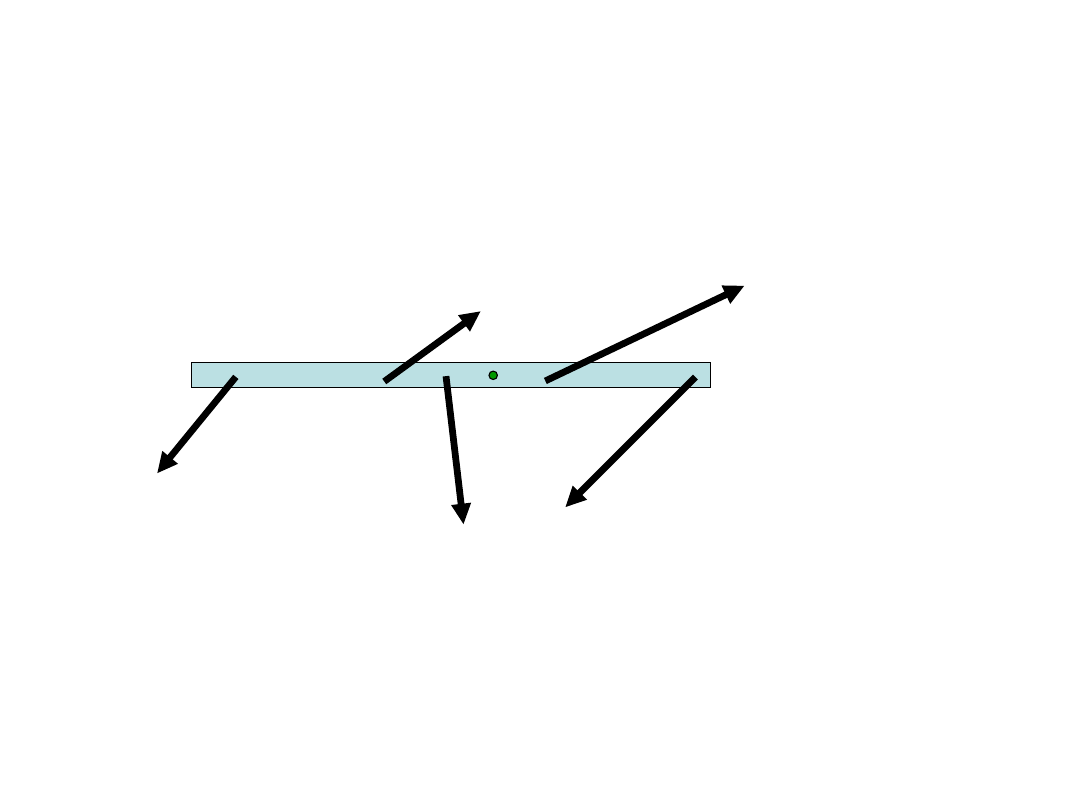
Dźwignie
• Dźwignia jest to sztywna belka,
mogąca obracać się dookoła osi
0
0
0
1
n
k
k
M
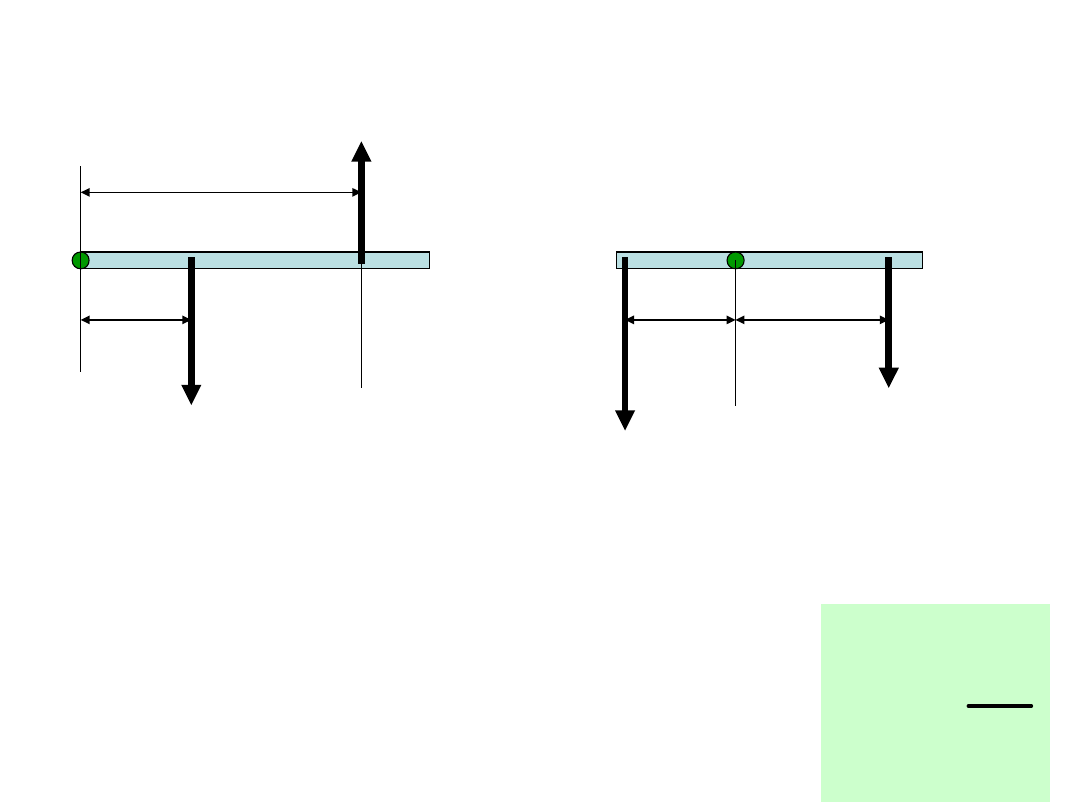
Dźwignie
0
0
P
Q
a
b
P
Q
Dźwignia jednostronna Dźwignia dwustronna
Pa – Qb = 0; czyli Pa = Qb
Jeżeli P jest siłą z jaką działamy,
a Q siła którą pokonujemy to zysk mechaniczny Z:
P
Q
Z
a
b
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
Wyszukiwarka
Podobne podstrony:
Biofizyka 01 0708
Biofizyka Ćw 02
Biofizyka kontrolka do cw nr 02
Biofizyka instrukcja do cw nr 02
Biofizyka instrukcja do cw nr 02
biofiz M9 02, Biofizyka
biofizyka wyklad 02
Biofizyka instrukcja do cw nr 02
Wyk ApM 2011 12 02, Biofizyka, VII Semestr, Aparatura medyczna
am1 0708 cz 02 szeregi liczbowe wstep
Ratownictwo Wyniki Zaliczenia z dnia 6 02 2012 biofizyka (1)
biofiza cw 31
więcej podobnych podstron