
1
Pomiary drgań

2
Pomiary drgań
• Ocena wzajemnego odizolowania
mechanicznego poszczególnych
konstrukcji
• Ocena stanu technicznego maszyn
wirujących
Wielkości charakteryzujące
drgania
• Przesunięcie cząstek obiektu x = x(t)
• Prędkość tych przesunięć v = v(t)
• Przyspieszenie a = a(t)
• Pulsacja = 2f
Zastosowanie w układzie pomiarowym
członów różniczkujących lub całkujących
pozwala na podstawie jednej wielkości
wyznaczyć dwie pozostałe
3
Źródła drgań
4
Wykorzystanie drgań
5
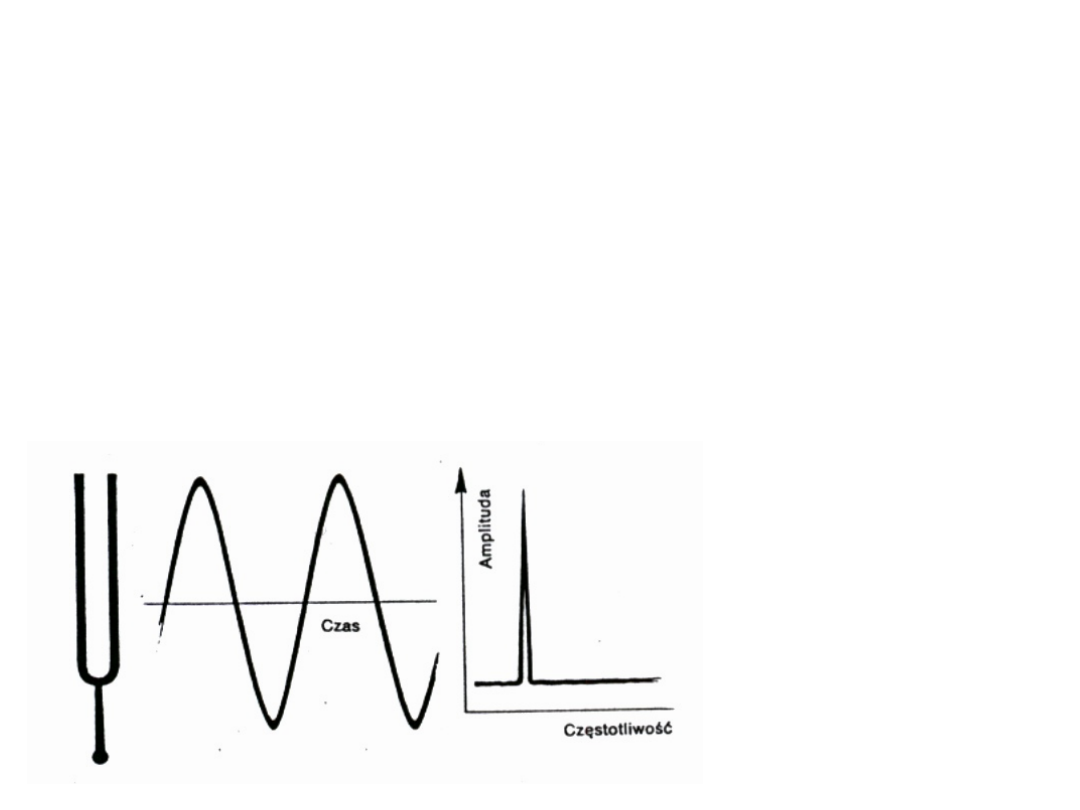
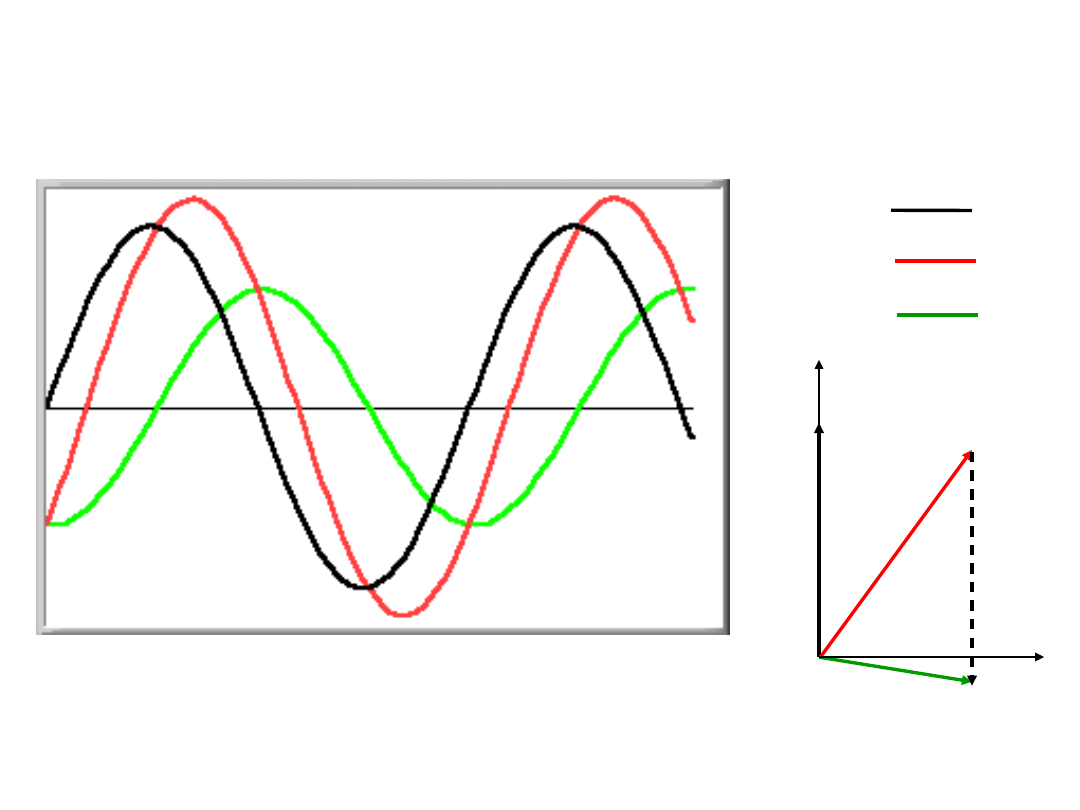
Drgania harmoniczne
Przesunięcie
Prędkość
Przyśpieszenie
Charakterystyki
drgań w funkcji
czasu i
częstotliwości
t
X
x
sin
t
V
v
cos
t
s
A
a
2
sin
6
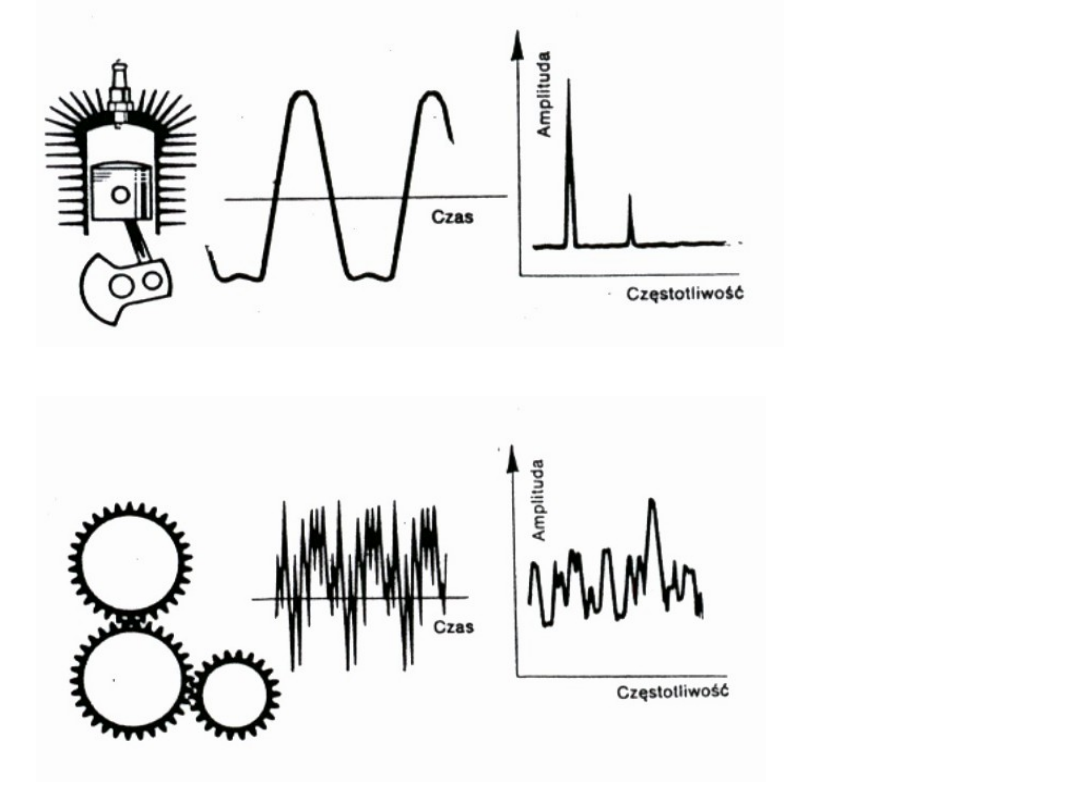
Charakterystyki
drgań w funkcji
czasu i
częstotliwości
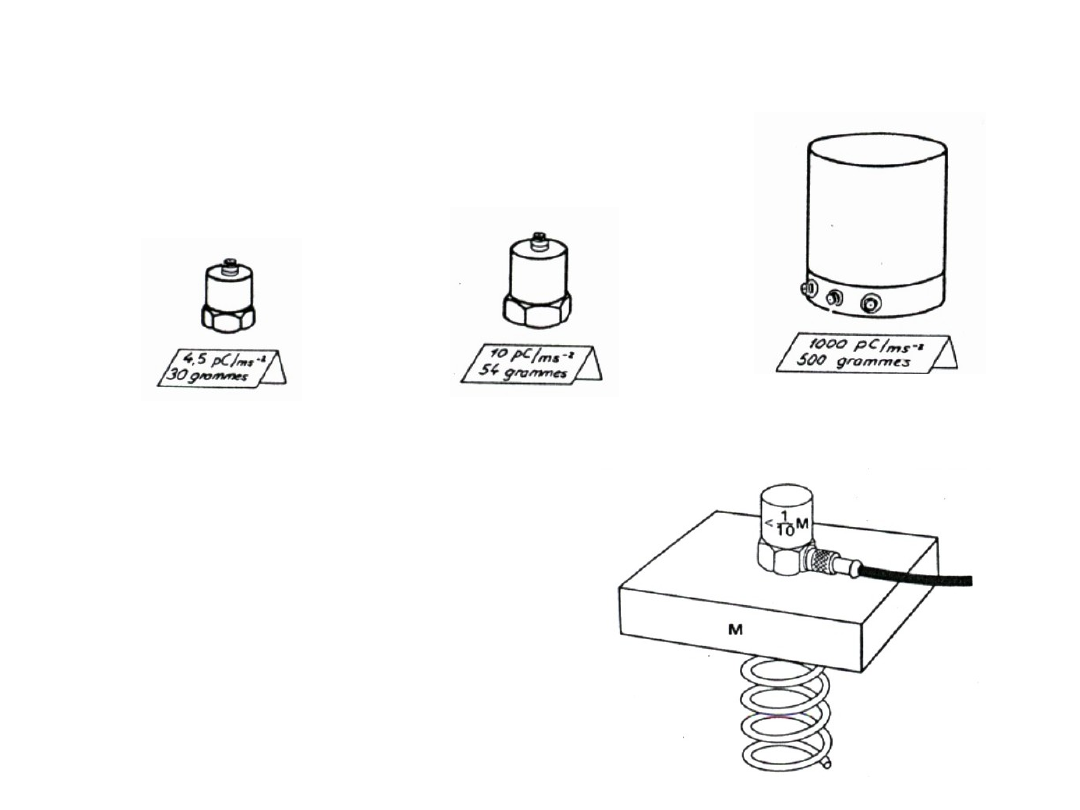
7
Akcelerometry
f
o
= 22
kHz
f
o
= 12
kHz
f
o
= 4,5 kHz
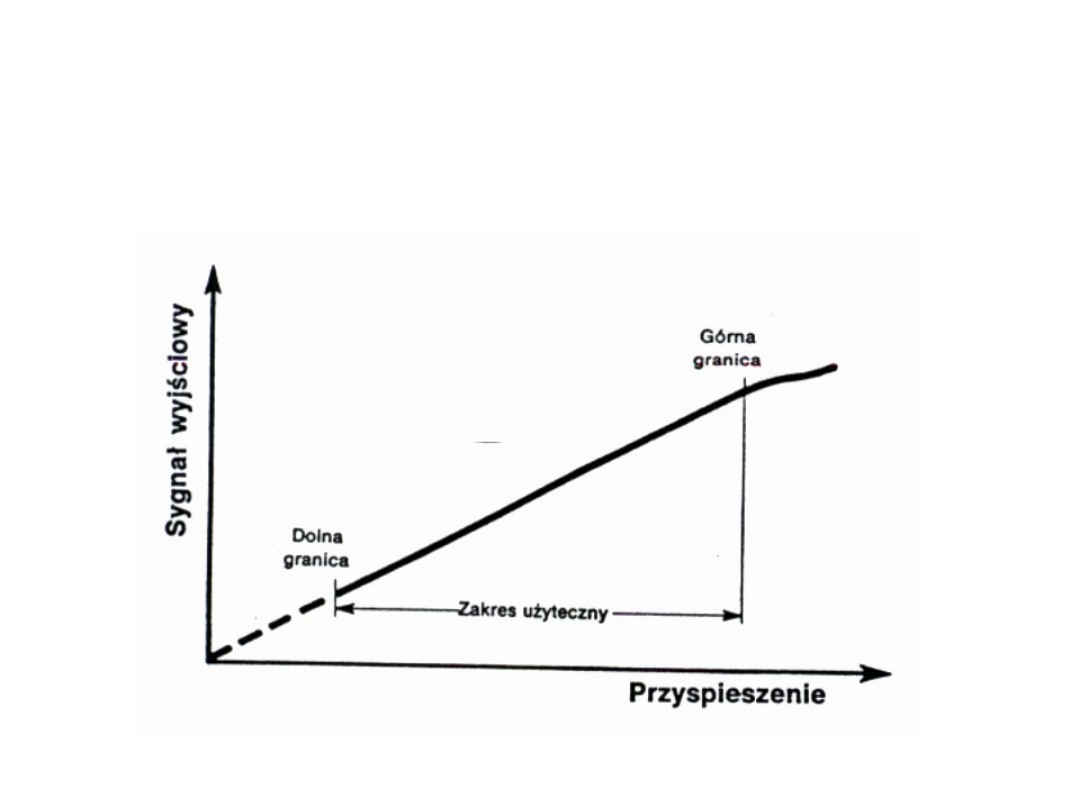
Dopasowanie
akcelerometru
do obiektu badanego
8
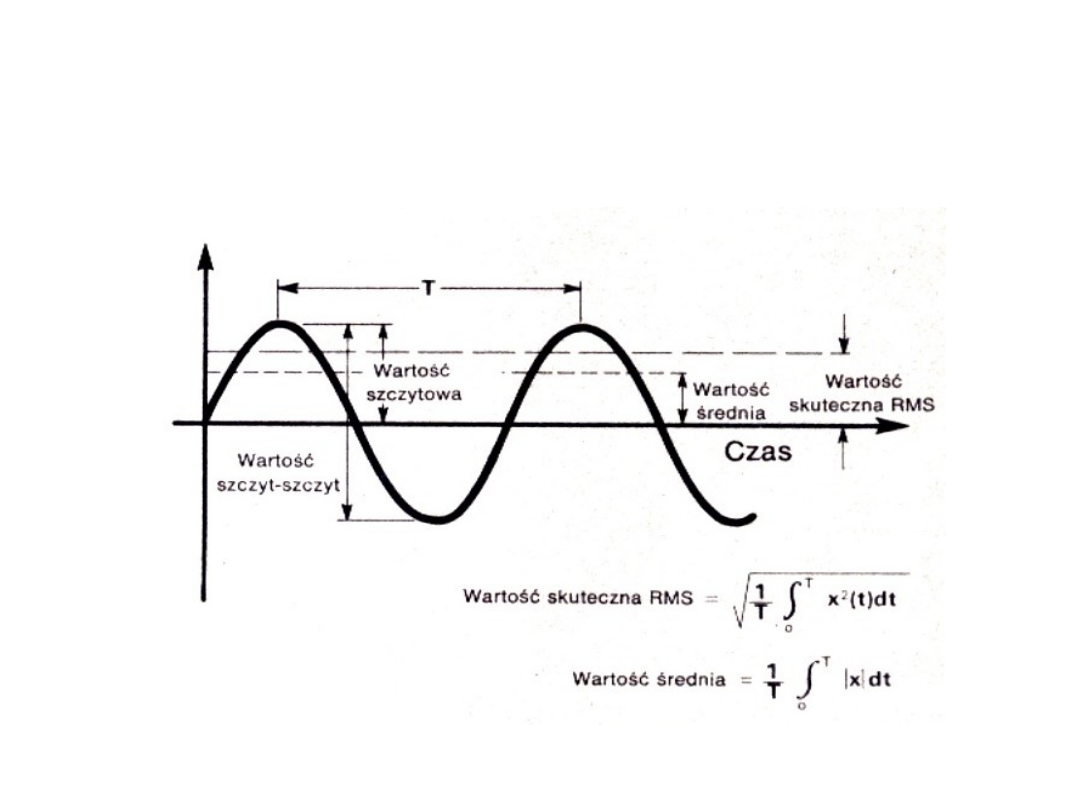
Charakterystyczne wielkości
drgań harmonicznych
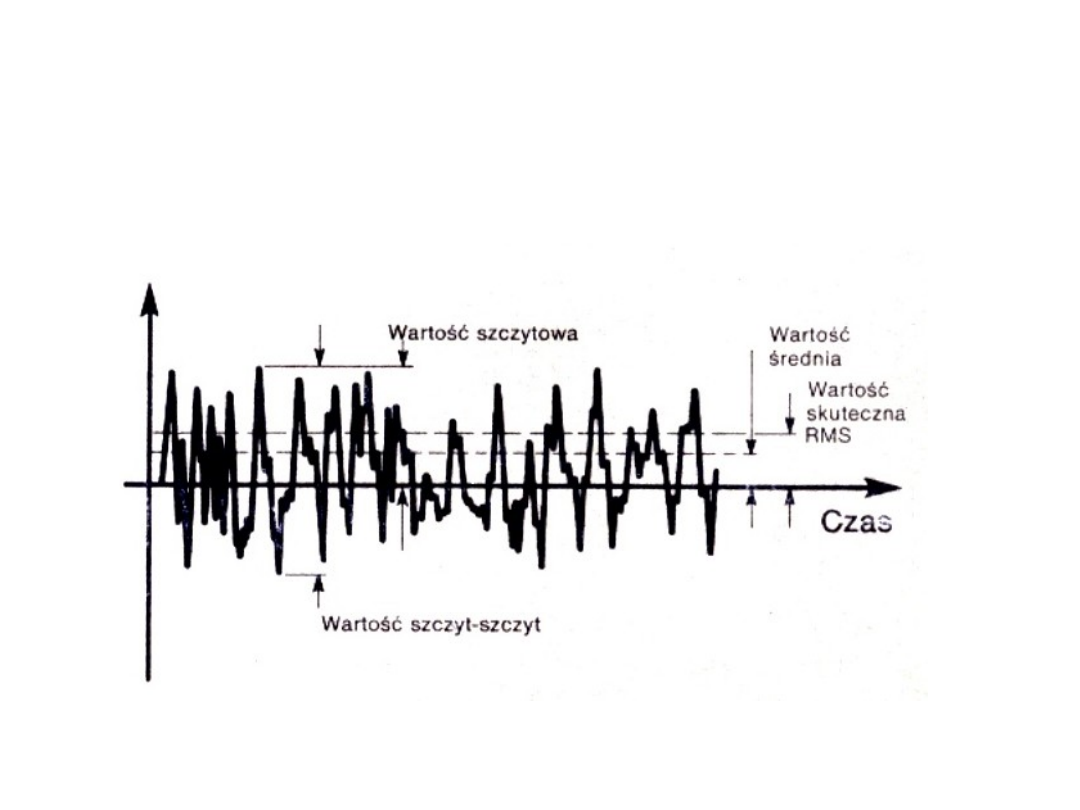
9
Charakterystyczne wielkości
drgań
Wartość szczyt-
szczyt
Wartość
szczytowa
Wartość
średnia
Wartoś
ć
skutecz
na
RMS
Czas

10
Przetwornik sejsmiczny
Przetwornik z masą drgającą o jednym
stopniu swobody przetwarzający:
wielkość wejściową – siłę F(t) na
wielkość wyjściową – przemieszczenie u(t).
Przetwornik taki może być wykorzystany
do pomiaru innych wielkości niż siła
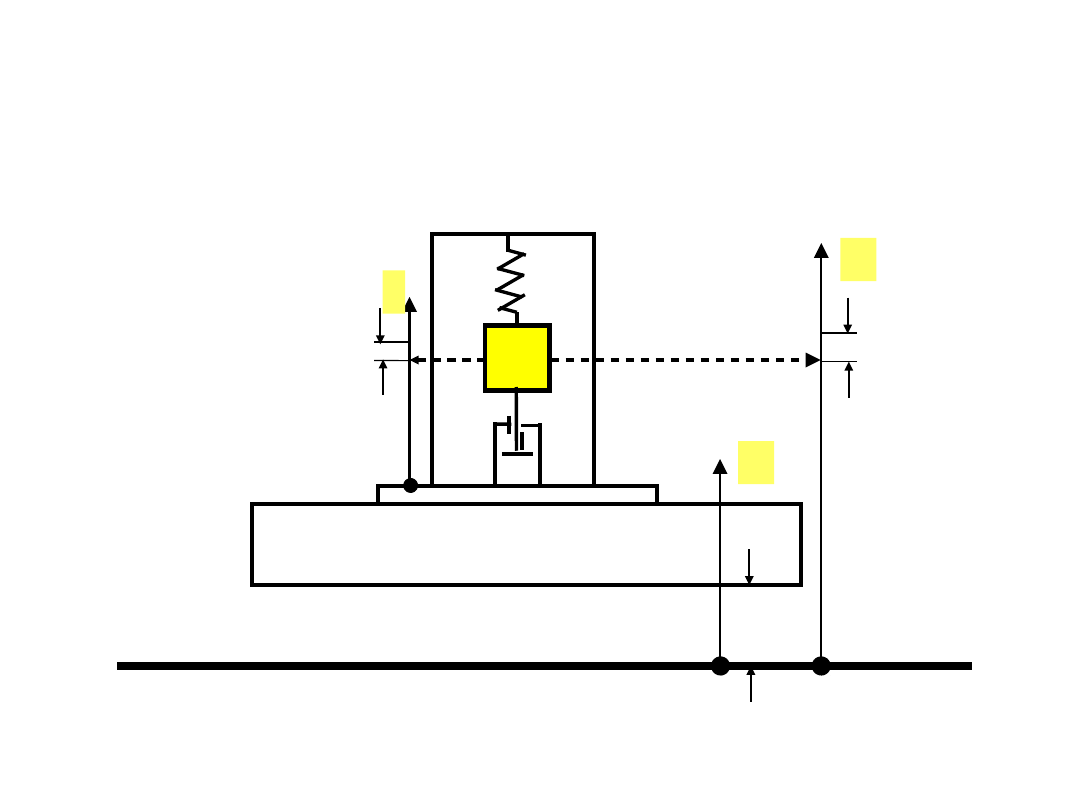
11
Schemat przetwornika
sejsmicznego
Obiekt
badany
y(t
)
u(t
)
x(t
)
k
s
k
t
m
x
u
y
Podłoże
odniesienia

12
Układy współrzędnych
• x(t)-współrzędna opisująca ruch obiektu
badanego i obudowy czujnika względem
nieruchomego układu współrzędnych
• y(t)-współrzędna opisująca ruch masy m
względem nieruchomego układu współrzęd-
nych
• u(t)-współrzędna opisująca ruch masy m
względem obiektu badanego i obudowy
czujnika

13
Funkcja przetwarzania czujnika
• x(t) – wielkość wejściowa, bezwzględne
przemieszczenie obiektu badanego i
obudowy czujnika względem nieruchome-
go układu współrzędnych
• y(t) – wielkość wyjściowa, bezwzględne
przemieszczenie masy m przetwornika
• u(t) – wielkość mierzona, przesunięcie
masy czujnika względem obudowy
u(t) = y(t) – x(t)
14
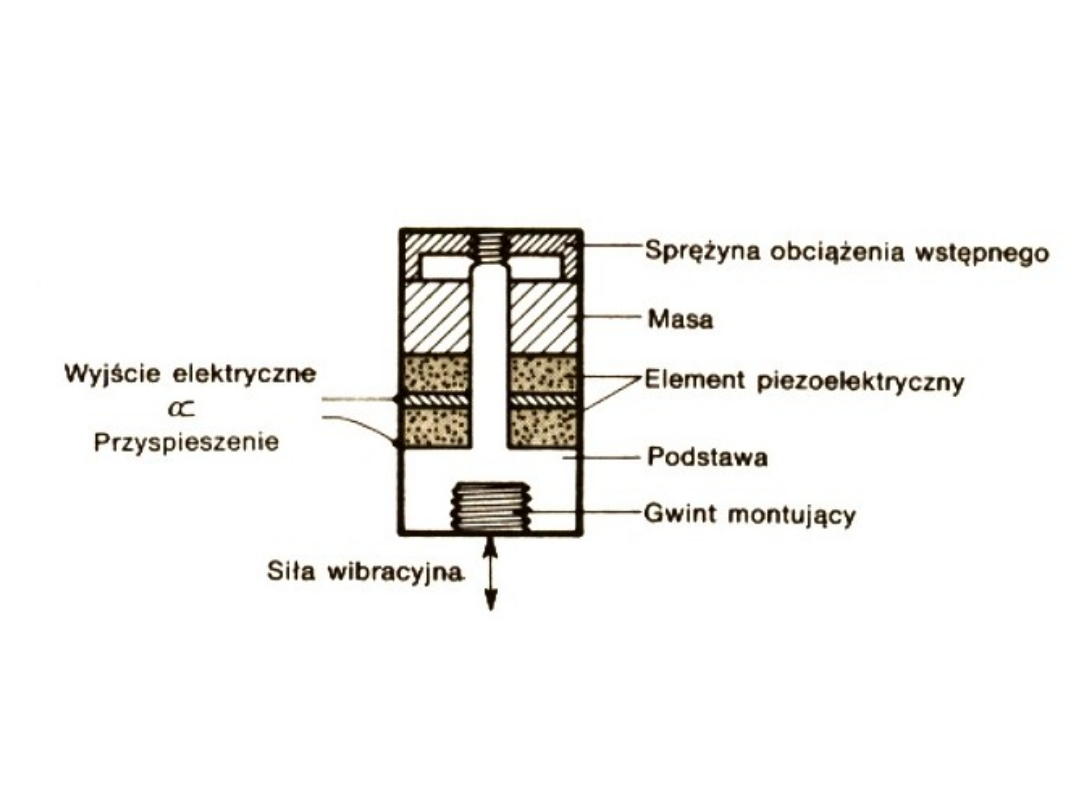
Konstrukcja akcelerometru
15
Wymuszenie harmoniczne x(t)
x(t
)y(t
)u(t
)
u(t) = y(t) – x(t)
X
U
Y
Re
Im
-
X
16
Wymuszenie harmoniczne
Drgania obiektu
x
t
= Xsinwt
Drgania masy czujnika
y
t
= Ysin(wt – f
y
)
Drgania masy czujnika
względem obudowy
u
t
= Usin (wt – f
u
)

17
Siły działające na masę m
• Siła bezwładności
• Siła tłumiąca
• Siła reakcji
sprężyny
W każdej chwili
F
i
= 0
2
2
b
dt
y
d
m
F
dt
du
k
dt
x
y
d
k
F
t
t
t
u
k
x
y
k
F
s
s
s
)
(
18
Charakterystyka
częstotliwościowa
akcelerometru
19
Parametry
charakterystyczne
Po uwzględnieniu
:
Pulsacja naturalna
czujnika
Współczynnik
tłumienia
Pulsacja względna
Czas bezwymiarowy
m
k
s
0
m
k
2
k
s
t
o
o
f
2
f
2
t
o
20
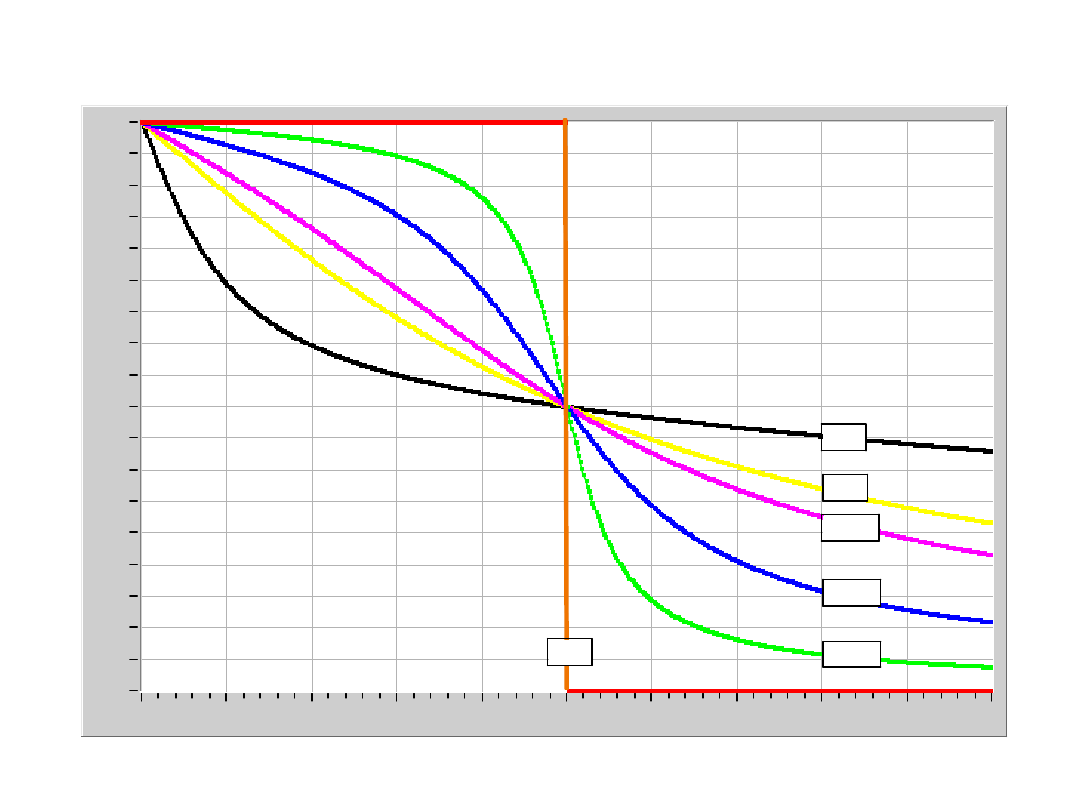
Charakterystyki amplitudowo-
częstotliwościowe 1
2,6
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
1,6
1,8
2,0
2,2
2,4
1,8
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0 1,1 1,2 1,3 1,4 1,5 1,6 1,7
=0,2
=0,3
=0,4
=0,5
=0,7
=5
=1
=2
U
X
m
m
21
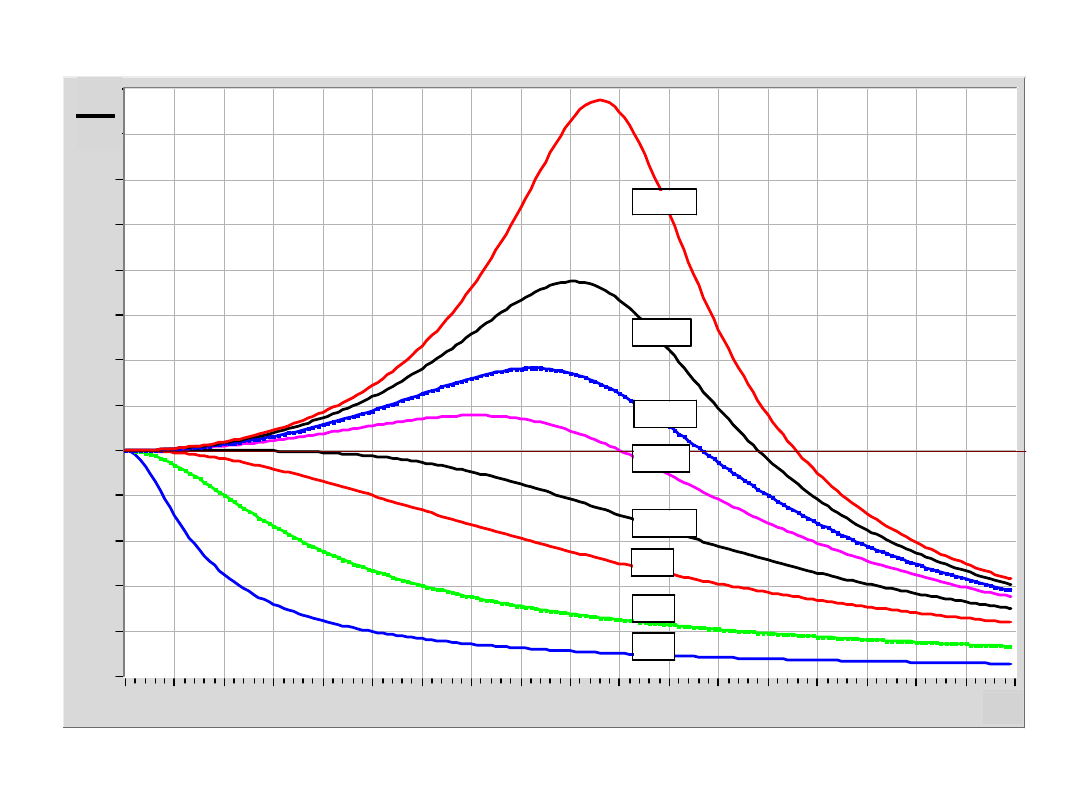
Charakterystyki amplitudowo-
fazowe
0
-180
-170
-160
-150
-140
-130
-120
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0,2
0,4
0,6
0,8
1,0
1,2
1,4
1,6
1.8
=3
=0,3
=0,7
=0,1
=1
=0
Document Outline
- Slide 1
- Pomiary drgań
- Źródła drgań
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Wymuszenie harmoniczne x(t)
- Wymuszenie harmoniczne
- Siły działające na masę m
- Slide 18
- Parametry charakterystyczne
- Charakterystyki amplitudowo-częstotliwościowe 1
- Charakterystyki amplitudowo-fazowe
Wyszukiwarka
Podobne podstrony:
Lab-diagnostyka-sem8-Pomiar drgan, Księgozbiór, Studia, Diagnostyka
NARZĘDZIA I SYSTEMY DO POMIARU DRGAŃ
Czujniki do pomiaru drgań RS
cw2 pomiary drgan maszyny id 123108
Podstawy pomiaru drgań mechanicznych, Dragania i hałas
pomiary drgań
5 POMIARY DRGAŃ, PRĘDKOŚCI OBROTOWEJ I DŹWIĘKU
Lab-diagnostyka-sem8-Pomiar drgan, Księgozbiór, Studia, Diagnostyka
C8 Pomiary drgan gruntu Mocowanie czujnikow
Normy pomiarów drgań pojazdów drogowych
1 1 pomiary parametrów ruchu drgań i prędkości obrotowej
Elektronika gotowe Różne metody pomiaru częstości drgań elektrycznych szczegó
POMIAR PREDKOSCI DZWIEKU METODA REZONANSU I METODA SKLADANIA DRGAN WZAJEMNIE PROSTOPADLYCHx
Metrologia-lab-Pomiary Parametrów Drgań Mechanicznych, drgania, Politechnika Radomska
Metrologia-lab-Pomiary Parametrów Drgań Mechanicznych, Drgania mechaniczne PROTO, POLITECHNIKA RADOM
Metrologia-lab-Pomiary Parametrów Drgań Mechanicznych, Drgania mechaniczne SPR, POLITECHNIKA RADOMSK
Metrologia-lab-Pomiary Parametrów Drgań Mechanicznych, Drgania mechaniczne, GENERATORY
więcej podobnych podstron