
Badanie dominacji sterowań
okresowych nad optymalnym
statycznym procesem
sterowania
.
Henryk Zelek
2-MPS(s)
Prowadzący: prof. dr hab. inż. O. Petrov
Teoria sterowania

WPROWADZENIE TEORETYCZNE
Definicja stabilności asymptotycznej
dyskretnego układu sterowania w
obszarze:
Punkt równowagi xr = 0 zredukowanego
układu sterowania
z czasem dyskretnym nazywa sie
punktem asymptotycznie stabilnym w
obszarze
D obejmującym ten punkt

Definicja globalnej stabilności
asymptotycznej dyskretnego
układu
sterowania:
Punkt równowagi xr = 0 zredukowanego
układu sterowania z
czasem dyskretnym nazywa sie punktem
globalnie asymptotycznie stabilnym,
jeżeli D = Rn

Definicja lokalnej stabilności
asymptotycznej dyskretnego układu
sterowania:
Punkt równowagi xr = 0 zredukowanego
układu sterowania
nazywa sie punktem lokalnie asymptotycznie
stabilnym, jeżeli D jest zbiorem
ograniczonym (jeżeli D leży w kuli o
promieniu ρ).
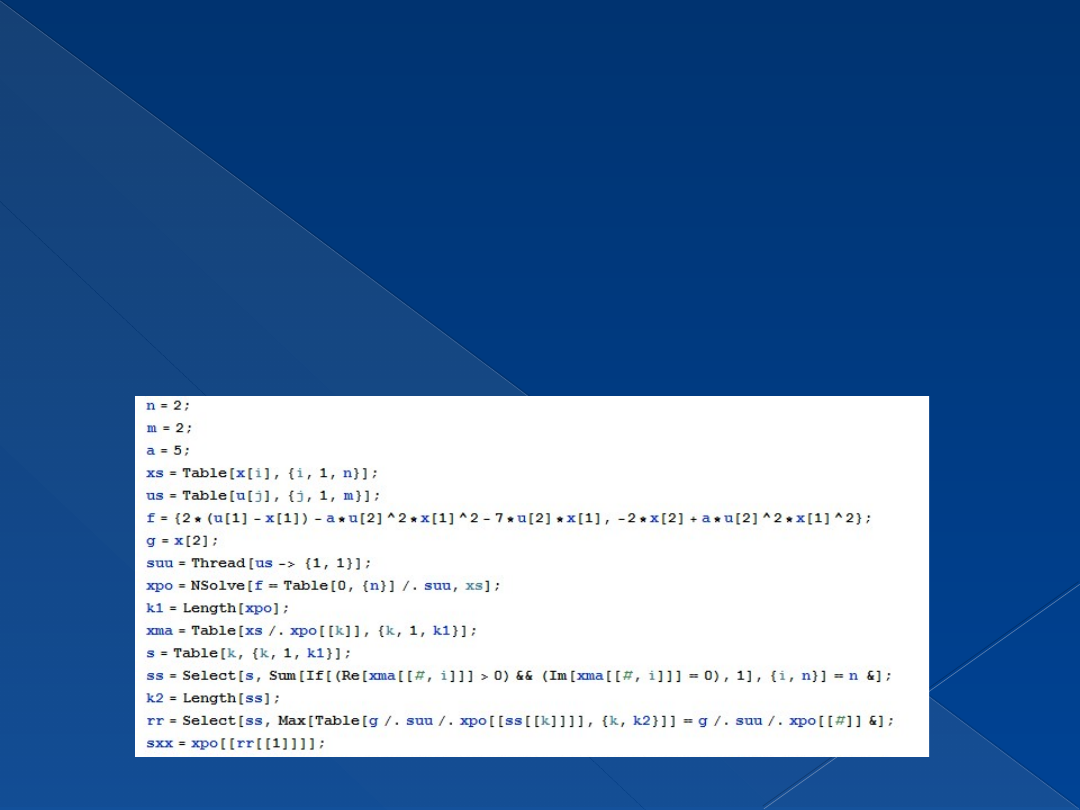
Przykład 1:chemiczny proces produkcyjny prowadzony
jest w zbiornikowym reaktorze chemicznym w postaci
reakcji A→B, A→C, gdzie A oznacza surowiec ,B - produkt
użyteczny, C-produkt uboczny, x[1]-stężenie A w
reaktorze, x[2]-stężenie B w reaktorze, u[1]-stężenie
surowca A w strumieniu wejściowym , u[2]-natężenie
dopływu katalizatora
(dane podstawowe statycznego procesu sterowania)
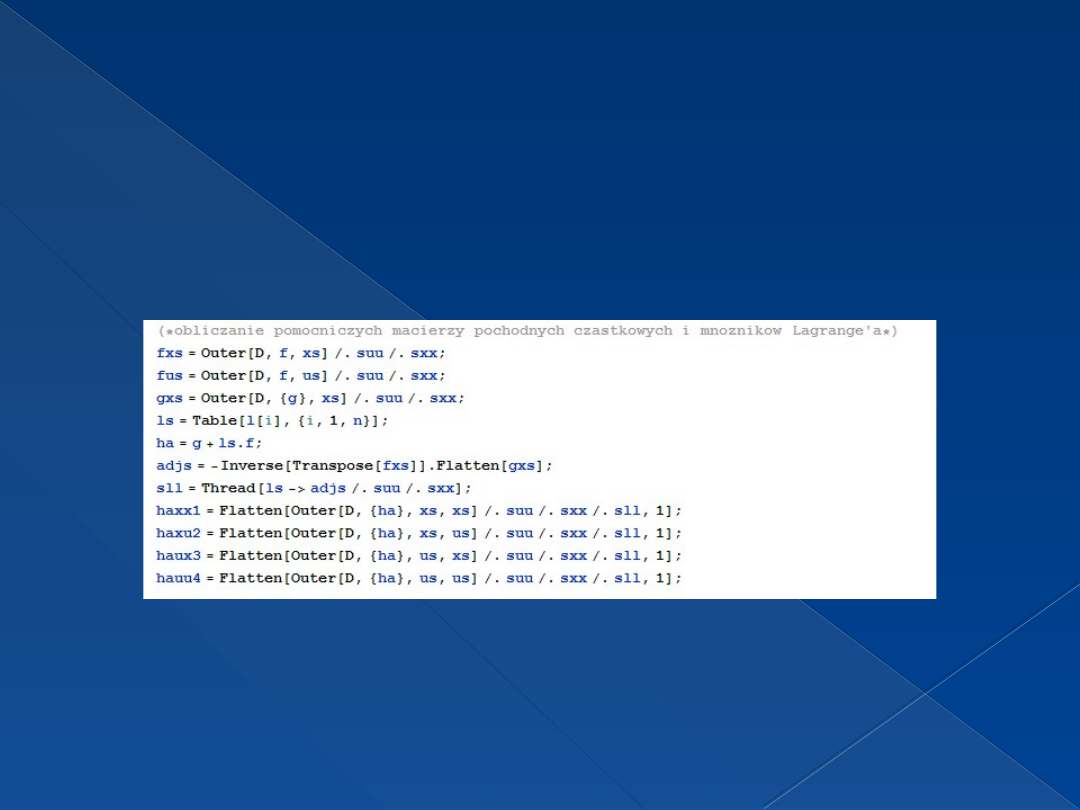
Obliczanie pomocniczych macierzy
pochodnych cząstkowych i mnożników
Lagrange’a
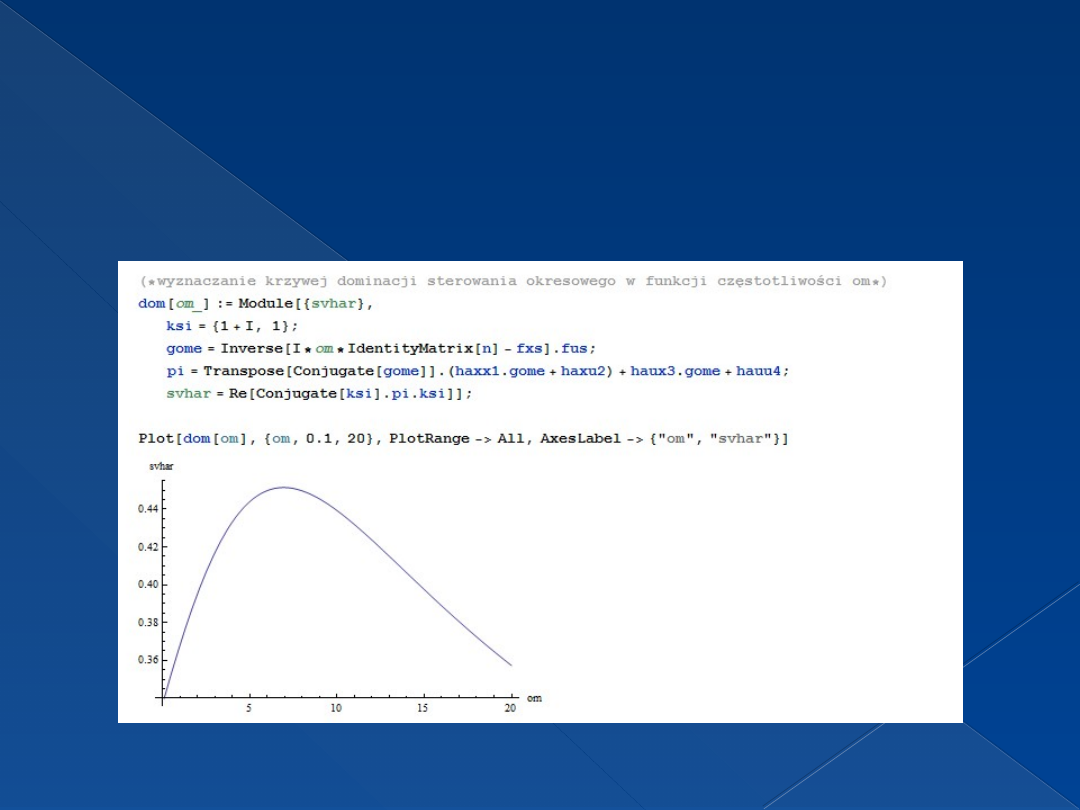
Wyznaczanie krzywej dominacji sterowania
okresowego w funkcji częstotliwości om
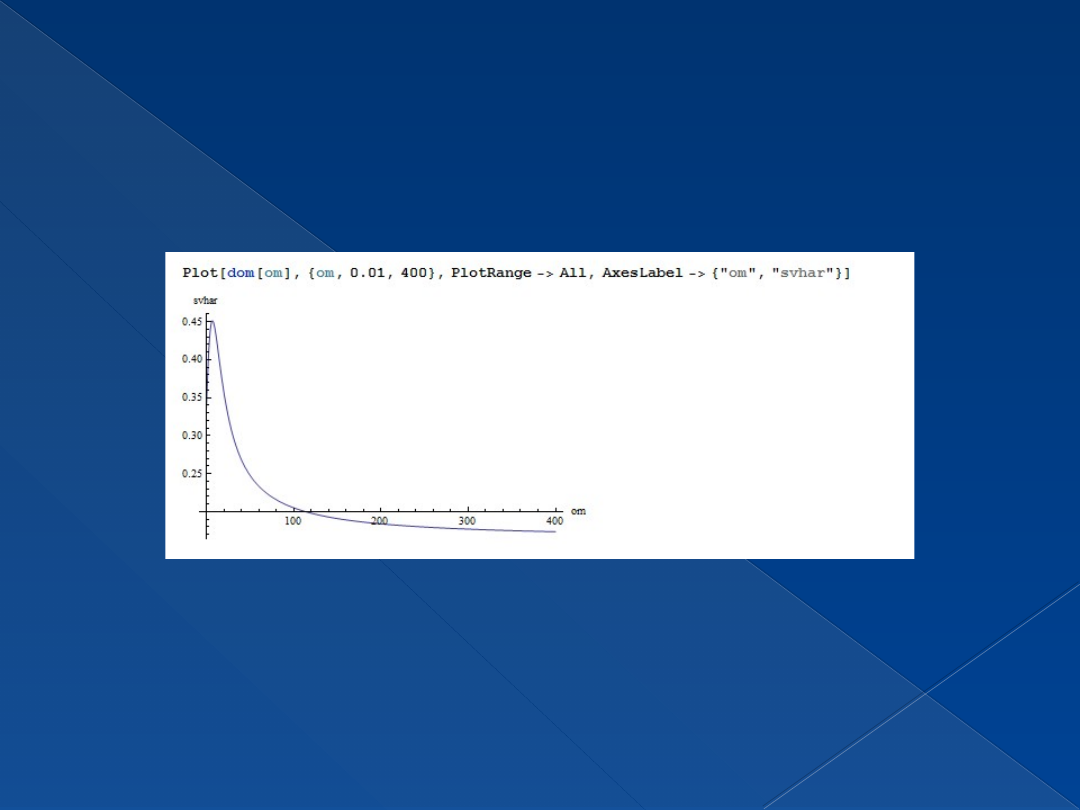
Wyznaczanie krzywej dominacji sterowania
okresowego w funkcji częstotliwości om
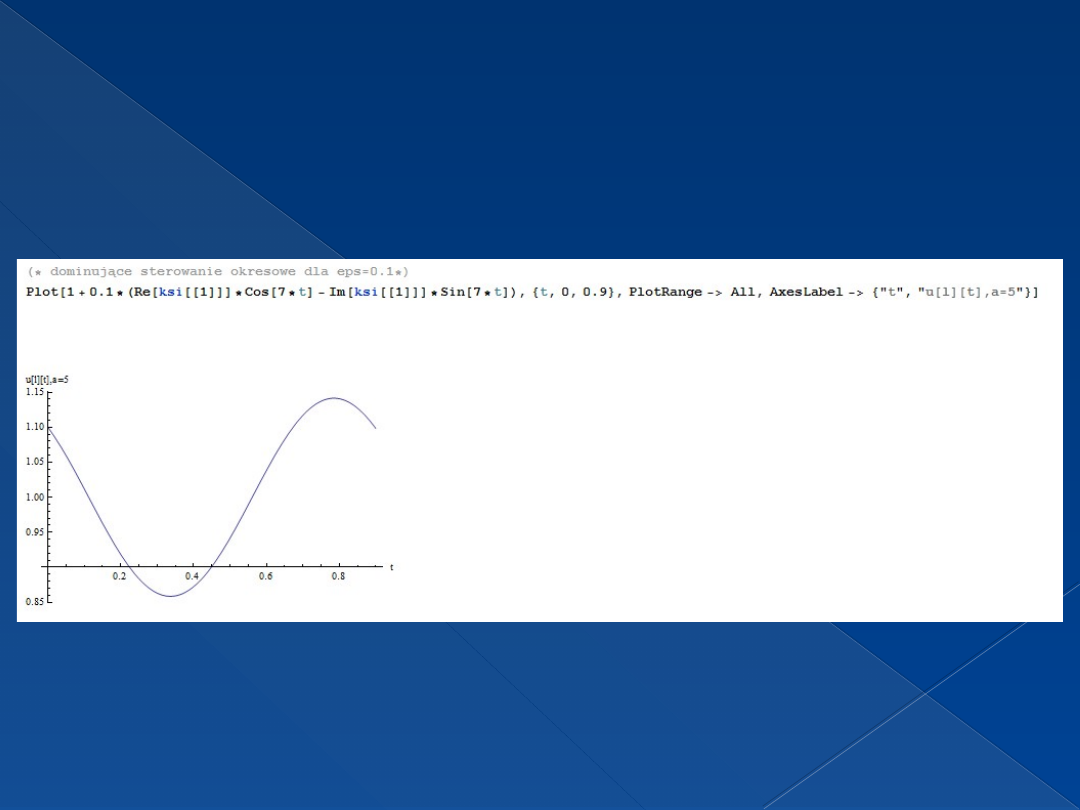
Dominujące sterowanie okresowe dla
eps=0.1
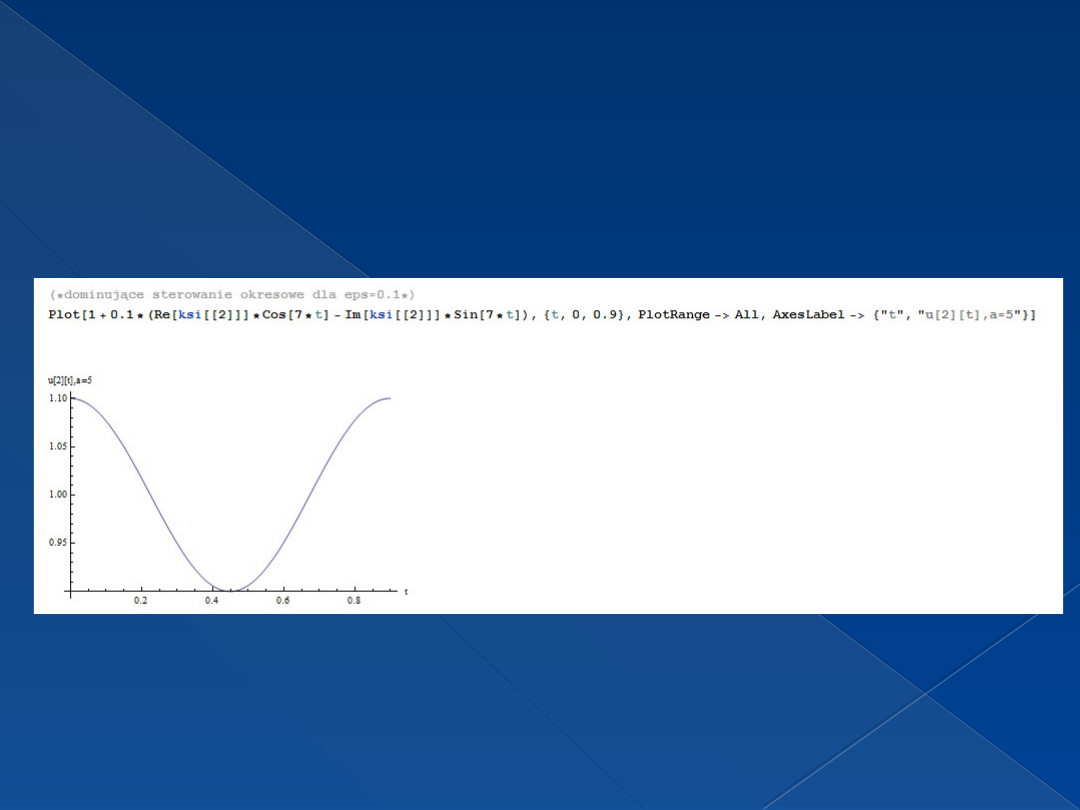
Dominujące sterowanie okresowe dla
eps=0.1
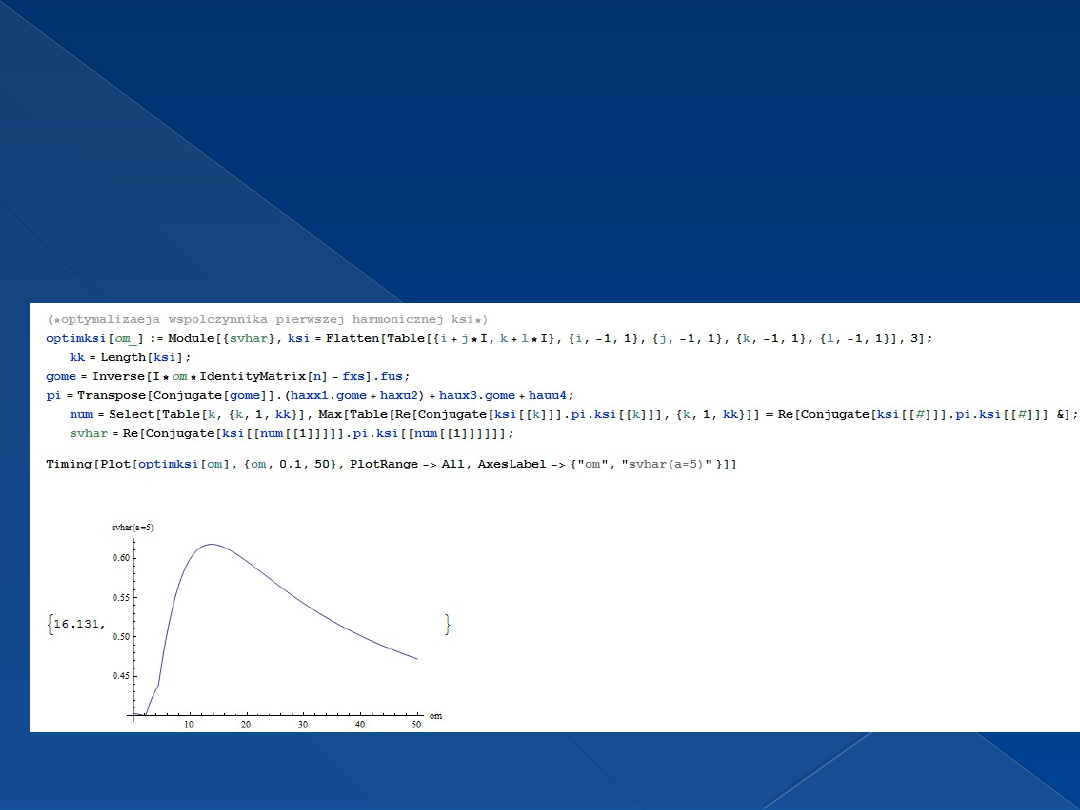
optymalizacja współczynnika
pierwszej harmonicznej ksi
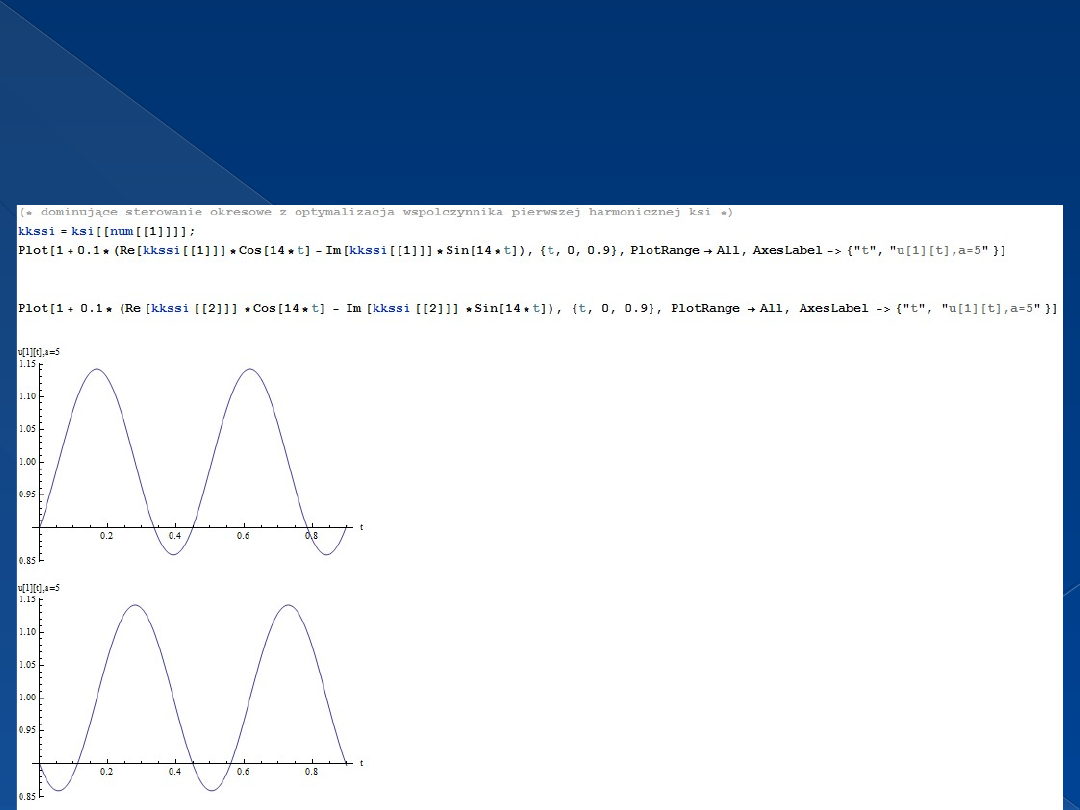
Dominujące sterowanie okresowe z
optymalizacją współczynnika pierwszej
harmonicznej ksi
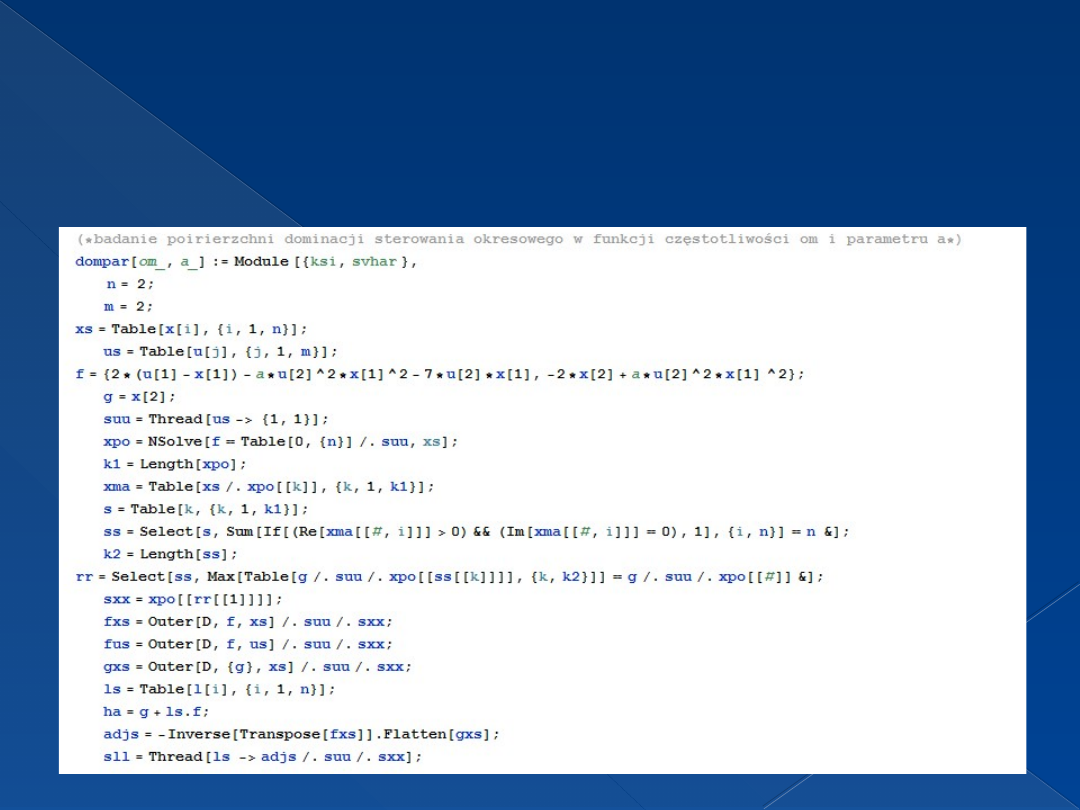
Badanie powierzchni dominacji sterowania
okresowego w funkcji częstotliwości om i
parametru a
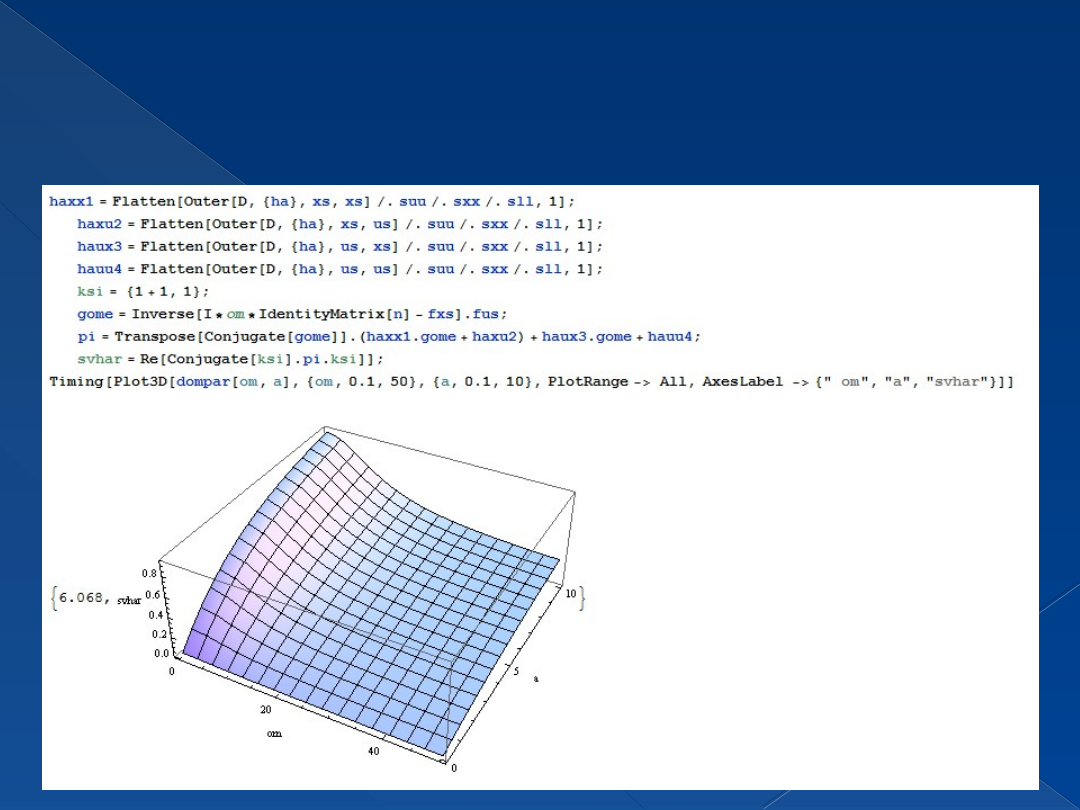
Badanie powierzchni dominacji sterowania
okresowego w funkcji częstotliwości om i
parametru a

Wnioski:
Funkcja ta jest dodatnio określona w
obszarze D
Różnica pierwszego rzędu tej funkcji
względem czasu dyskretnego wzdłuż
dyskretnej trajektorii stanu układu jest
również dodatnio określona w tym obszarze
W przypadku nieograniczonego obszaru
D = Rn funkcja ta spalenia warunek
promieniowej nieograniczoności lim||x||
→+∞ V (x, k) = +∞.
Document Outline
- Slide 1
- WPROWADZENIE TEORETYCZNE
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Dominujące sterowanie okresowe dla eps=0.1
- Dominujące sterowanie okresowe dla eps=0.1
- optymalizacja współczynnika pierwszej harmonicznej ksi
- Slide 12
- Slide 13
- Slide 14
- Wnioski:
Wyszukiwarka
Podobne podstrony:
Badania nad twórczością plastyczną w procesie rozwoju dziecka, Studia, Twórczość dziecka
Implementacja i badania algorytmów sterowania robotem dwukołowym
Badanie układu sterowania z regulatorem PID
BADANIA SYMULACYJNE STEROWANIA Nieznany
39 Badanie układów sterowania z regulatorami nieciągłymi
Sąd nad nagrodą i karą w procesie wychowawczym
5M Badanie prostownik w sterow Nieznany
Badanie prostownika sterowanego 1-fazowego, Politechnika Lubelska
Sąd nad nagrodą i karą w procesie wychowawczym
Prusak ZPowązka Optymalizacja przebiegu procesów
Badanie układów sterowania z regulatorami ciągłymi
Badanie ukladow sterowania ze s Nieznany (2)
Implementacja i badania algorytmów sterowania robotem dwukołowym
Badanie układu sterowania z regulatorem PID
więcej podobnych podstron