Pojazd zdalnie sterowany przez IR
#include <IRremote.h>
#define irPin 11
IRrecv irrecv(irPin);
decode_results results;
// definiuj piny dla wyjść
int M1_A = 8;
int M1_B = 9;
int M2_A = 2;
int M2_B = 3;
void setup() {
Serial.begin(9600);
irrecv.enableIRIn();
//ustawienie jako wyjścia
pinMode(M1_A, OUTPUT);
pinMode(M1_B, OUTPUT);
pinMode(M2_A, OUTPUT);
pinMode(M2_B, OUTPUT);
}
void loop()
{
if(irrecv.decode(&results)){
{
if(results.value==0xFF10EF) //jeśli wykryto naciśnięcie to
{
digitalWrite(M1_A, HIGH); //silnik lewy w tył
}
if(results.value==0xFF30CF) //jeśli wykryto naciśnięcie to
{
digitalWrite(M1_B, HIGH); //silnik lewy w przód
}
if(results.value==0xFF5AA5) //jeśli wykryto naciśnięcie to
{
digitalWrite(M2_A, HIGH); //silnik prawy w tył
}
if(results.value==0xFF7A85) //jeśli wykryto naciśnięcie to
{
digitalWrite(M2_B, HIGH); //silnik prawy w przód
}
if(results.value==0xFF38C7) //jeśli wykryto naciśnięcie to
{
digitalWrite(M2_A, HIGH); //silnik prawy w tył
digitalWrite(M1_A, HIGH); //silnik lewy w tył
}
if(results.value==0xFF18E7) //jeśli wykryto naciśnięcie to
{
digitalWrite(M2_B, HIGH); //silnik prawy w przód
digitalWrite(M1_B, HIGH); //silnik lewy w przód
}
}
irrecv.resume();
delay(150);
}
else
{
//wyłącz które nie mają aktywnych wejść
digitalWrite(M1_A, LOW);
digitalWrite(M1_B, LOW);
digitalWrite(M2_A, LOW);
digitalWrite(M2_B, LOW);
}
}
Podwozie robota 2WD dwukołowe z silnikami - prostokątne
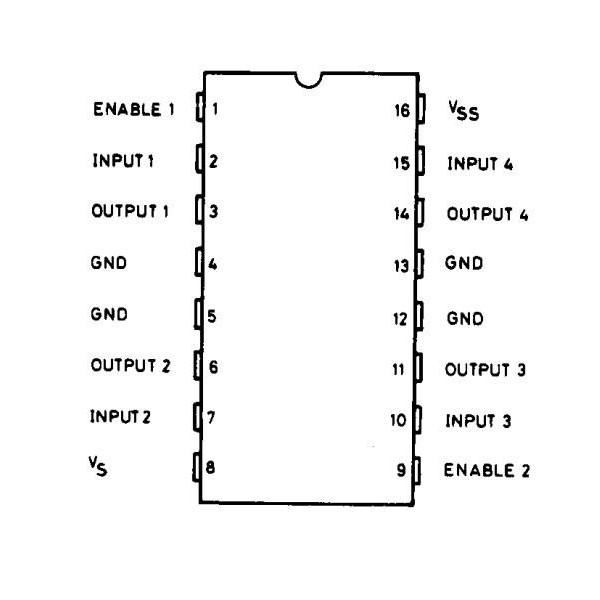
L293D - dwukanałowy sterownik silników 36V/0.6A
https://botland.com.pl/sterowniki-silnikow-dc/176-l293d-dwukanalowy-sterownik-silnikow-36v06a.html
Klon Arduino Uno R3 z ATMEGA328P
http://elty.pl/pl/p/Klon-Arduino-Uno-R3-z-ATMEGA328P-kabel-USB/1442
Pilot IR + odbiornik podczerwieni 1838T + moduł
Wyszukiwarka
Podobne podstrony:
1996 11 Zdalne sterowanie przez telefon, część 1
Lista obsługiwanych sterowników przez program DeltaScan 5 0 1Z
1996 12 Zdalne sterowanie przez telefon, część 2
2121 1 Zdalne sterowanie przez telefon
Dokumenty mówiące o organizacji przez szkołę wypoczynku uczniów, Język polski i szkoła podstawowa
negatywne skutki globalizacji, Globalizacja to trend cywilizacyjny, którego celem jest utworzenie j
1996 11 Zdalne sterowanie przez telefon, część 1
Lista obsługiwanych sterowników przez program DeltaScan 5 0 1Z
1996 12 Zdalne sterowanie przez telefon, część 2
2447 System sterowania przez telefon
VAT 22 Dokument potwierdzający wywóz przez nabywcę nowego śr
Uczył Gajcego i Bartoszewskiego Zostało po nim jedno opowiadanie, dziesiątki konspiracyjnych dokumen
Zajęcia obserwowane przez stażystę, dokumentacja rozwoju zawodowego nauczyciela stażysty, Umiejętnoś
kodowanie sterownikow Audi A4, auta, Diagnostyka dokumety, procedury diagnostyczne
ZUS SR3 Oświadczenie o hodzie osiąganym przez osoby fizyczne, Dokumenty, różne pisma, Ubezpieczenia
Jak prawidłowo ocenić uzupełnione przez wykonawcę dokumenty
projekt geomorfologia, Nowy Dokument programu Microsoft Word (3), Przekrój geologiczny przez dolinę
Etologia - Notkatki z wykładów oraz skryptu Sadowski-Chmurzyński, STEROWANIE CZYNNOŚCIAMI ROZRODCZYM
więcej podobnych podstron