
The University of California at Berkeley
April 2001
Implementation of an Active Suspension, Preview
Controller for Improved Ride Comfort
by
Mark D. Donahue
B.S. Boston University, 1998
Research Advisor:
Professor J. Karl Hedrick, Ph.D.
Mechanical Engineering
Second Reader:
Professor Kameshwar Poolla, Ph.D.
Mechanical Engineering
Submitted to the Department of Mechanical Engineering, University of California at
Berkeley, in partial satisfaction of the requirements for the degree of
Master of Science, Plan II
Implementation of an Active Suspension, Preview Controller for
Improved Ride Comfort
Copyright 2001
by
Mark D. Donahue
i
Abstract
Implementation of an Active Suspension, Preview Controller for
Improved Ride Comfort
by
Mark D. Donahue
Master of Science in Mechanical Engineering
University of California at Berkeley
Professor J. Karl Hedrick, Chair
A fully active suspension and preview control is utilized to improve ride comfort, which
allows increased traveling speed over rough terrain. Specifically, the methodology of
model predictive control has been applied to address suspension saturation constraints,
suspension rate limits, and other system non-linearities. For comparison, the following
non-preview controllers were implemented: a sky hook damping controller, a linear
quadratic regulator, and a mock passive suspension controller. Particular attention is
given to the hydraulic actuator force controller that tracks commands generated by
higher-level controllers. The complete system has been successfully implemented on a
military HMMWV using a commercially available microprocessor platform.
Experimental results show that the power absorbed by the driver is decreased by more
than half, significantly improving ride comfort.

ii
This work is dedicated to all those who have inspired
me throughout my life, with special thanks to my family & friends
iii
Table of Contents
Preface viii
Acknowledgments x
Chapter 1 -
Structure.................................................................................... 1
Control without Preview ........................................................................ 3
Control...................................................................................... 4
Equipment................................................................................. 5
car.............................................................................................. 7
actuator .................................................................................. 7
system .................................................................................... 9
Algorithms .................................................................................... 10
Dynamic Surface Control....................................................................... 10
Redefinition................................................................................ 12
Adaptation............................................................................. 13
2.4.1 Setup....................................................................................................... 14
2.4.2
Model Error Approximation................................................................... 15
Results ................................................................................. 16
High-Level Control Filters ..................................................................... 17
Information................................................................................... 19
Generation ................................................................................ 20
Preview Sensor Correction..................................................................... 20
Buffer ....................................................................................... 21

iv
Preview Correction Modifier ................................................................. 23
Criterion ................................................................................ 26
Sky Hook Damping Controller................................................................... 28
Controllers............................................................................... 36
References 42
Appendix A - HMMWV Hardware
Amplifiers .................................................................................... 49
Accelerometers & Gyros ........................................................................ 50
Sensors ..................................................................................... 51
Appendix B - Signal Processing
B.1 Autobox...................................................................................................... 56
B.2 Signal
Conditioning.................................................................................... 59
Appendix C - Real-time Software
Environment................................................................... 60
Architecture...................................................................... 62
Signal Processing Modules .................................................................... 64
Modules..................................................................................... 66
Modules................................................................................ 68
v
List of Figures
Figure 1.3: Diagram of higher level control structure, 20 sensors required ...................... 3
Figure 1.4: Diagram of preview control structure, 22 sensors required............................. 4
Figure 2.6: Plot of simulated (top) vs. actual (bottom) controller performance .............. 16
smoothing filter step response .................................................... 18
Figure 3.1: Plot of generated & buffered preview data matched with load cell peaks .... 20
Figure 3.2: Diagram and nomenclature definition for preview correction ...................... 21
Figure 3.4: Interpolation and re-sampling of the road profile preview information........ 22
Figure 3.5: Plot of raw preview data and corrected & buffered preview outputs when
Figure 3.7: Plot of advanced HPR correction data and new preview data....................... 25
Figure 4.1: Plot of damping force vs. suspension velocity for a standard HMMWV...... 27
Figure 4.2: Diagram for sky hook damping and standard quarter car equations ............. 28
Figure 5.2: Plot of FTC performance in heave, pitch & roll modes ................................ 33
Figure 5.4: Plot of sum squared relative velocity error for output redefinition ............... 34
.................................................................... 35
Figure 5.6: Plot of FTC performance tracking a discrete, generated control signal F
Figure 5.7: Plot of higher level controller performance evaluated at the test track ......... 37
vi
Figure 5.8: Plot of FTC performance tracking the MPC F
of Figure 5.7..................... 37
Figure 5.9: Plot of higher level controller performance evaluated off-road .................... 38
Figure 5.11: Plot of MPC performance with and without generated preview data.......... 40
Figure A.2: Physical schematic for the experimental HMMWV..................................... 45
Figure A.3: Schematic for the HMMWV hydraulic system ............................................ 47
Figure A.4: Photographs of hydraulic actuator installations: left- Front right- Rear ...... 47
Figure A.5: Photograph of Lotus interface and signal conditioning box......................... 49
Figure A.7: Specification sheets for UCB added vehicle sensors. top- chassis
accelerometer middle- hub accelerometer bottom- rate gyro....................... 51
Figure A.8: Plots of preview sensor comparison: top- Parking curbs, slow bottom- Dirt
Figure A.9: Photograph of original radar mount with key dimensions labeled ............... 54
Figure A.10: Photograph of new, wooden, preview mount in WTA24 configuration .... 55
Figure B.1: Photograph of AutoBox expansion housing for in-vehicle experiments ...... 57
Figure B.2: Diagram of the hardware architecture for active suspension control ........... 58
Figure B.3: Schematic for the summing amplifier used for the WTA24......................... 59
Figure C.2: Simulink model of underneath the “Input Bias & Filtering” block.............. 64
Figure C.3: Simulink model of underneath the “Output Bias & Limit” block ................ 65
Figure C.4: Simulink model of underneath the “Control Computation” block ............... 66
Figure C.6: Simulink model of the final version of the FTC for one actuator. ............... 67
Figure C.7: Simulink model of a fully populated force surface for one actuator’s FTC . 68
Figure C.8: Simulink model of “CPU Alpha”, notice inter-task data transfer methods .. 69
Figure D.2: Plot of rate limiting speed for a given terrain roughness. 55mph is taken as
the maximum attainable HMMWV speed. .................................................... 71
vii
List of Tables
......................................................................................... 29
......................................................................................... 30
....................................................................................... 30
Table A.2: Experimental HMMWV, Lotus installed sensors and transducers ................ 48
viii
Preface
The purpose of an automobile suspension is to adequately support the chassis, to maintain
tire contact with the ground, and to manage the compromise between vehicle road
handling and passenger comfort [11]. Of the numerous configurations and
implementations of vehicle suspension systems, the majority can be classified as passive
suspension, as semi-active suspension, or as active suspension.
When designing a standard, passive suspension, the tradeoff mentioned above is made
upfront and cannot be easily changed. For example, a sports car suspension will have
stiffer shock absorbers for better road handling while the shock absorbers on a family
vehicle will be softer for a comfortable ride. In the case of semi-active and active
suspension systems, the tradeoff decisions can be changed in real-time. A semi-active
suspension has the ability to change the damping characteristics of the shock absorbers.
The fully active suspension can add power to the system [16]. One way to understand the
apparently subtle difference between semi-active and fully active suspensions is to
consider a hypothetical conflict with a known pothole. A semi-active system will make
the suspension soft when hitting the hole and then stiff after the hole. A fully active
suspension could feasibly lift the wheel over the pothole. The research presented here is
for fully active suspension systems.
The usage of active suspensions is quite varied; it could involve the control of individual
seats or the control of entire trains. For the purposes of this project, a specific application
was studied: control for the hydraulic actuators of an off-road military vehicle, the
HMMWV. The vehicle under investigation has been specially equipped.
In general, the following equipment is needed to institute an active suspension system:
1. Actuators - devices used to convert an electrical signal to mechanical motion,
typically these replace the shock absorbers of a vehicle and require a good
deal of power

ix
2. Sensors - devices to measure vehicle information, typically these measure
suspension expansion, and various accelerations
3. Computer - this is used to interpret sensor data and determine the actuator
control signal
This paper aims to present one way to assemble these devices into a tangible increase in
ride comfort. Additional research was conducted to obtain and use preview information
of the upcoming road to further improve ride comfort. Preview is needed to, “lift the
wheel over the pothole” as mentioned above.
While the immediate application is for use in traversing rough, off-road terrain, much of
what is discussed here can be applied to any active suspension system. Perhaps a more
propitious application of the technology is on emergency vehicles such as ambulances or
fire trucks. This would be particularly useful in states such as California where speed
bumps are customarily used on neighborhood streets as a means to reduce traffic flow.
x
Acknowledgments
First and foremost I would like to thank my research advisor, the James Marshall Wells
Professor and Chairman J. Karl Hedrick, for whom I have the greatest amount of respect
and admiration. Professor Hedrick not only afforded me the opportunity to work on this
project but also provided valuable education and direction in the field of control systems.
Many people have been involved in this project throughout the years. In particular, this
work was made possible by the prior research of Professor Andrew Alleyne, University
of Illinois at Urbana Champagne, and Dr. Carlos Osorio of the University of California at
Berkeley. The technical support and software expertise of Jayesh Amin from Scientific
Systems Company Inc. enabled much of the higher level control theory and
implementation.
The following people have provided stimulating conversation and engaging project
insight, my roommates Shawn Schaffert, Cory Sharp, and Johan Vanderhaegen as well as
my lab partners Michael Uchanski and John Absmeier.
I would like to thank the project sponsors: Scientific Systems Company Inc., the SBIR
Project Office, and the US Army TARDEC. This work was completed under Phase II of
the SBIR contract number DAAE07-96-C-X007.
1
Chapter 1 - Introduction
The HMMWV system has evolved into an organized, logical, hierarchical structure.
Essentially, initial control algorithms became springboards for future, more complex
controllers. Some of the legacy controllers provide a level of safety as well as a readily
available means to debug system problems. Other legacy controllers allow for side-by-
side comparison among control schemes. The controller software, detailed in Appendix
C, has been written to allow transition between the various control algorithms in real-
time. This chapter will explain the many operating modes, touch upon the key
mechanical components and enumerate project vernacular.
1.1 Controller Structure
The structure presented here serves as road map to the remaining chapters. In following
chapters the control algorithms will be discussed. However, some controllers mentioned
simply offer an alternative approach and only a brief explanation is provided.
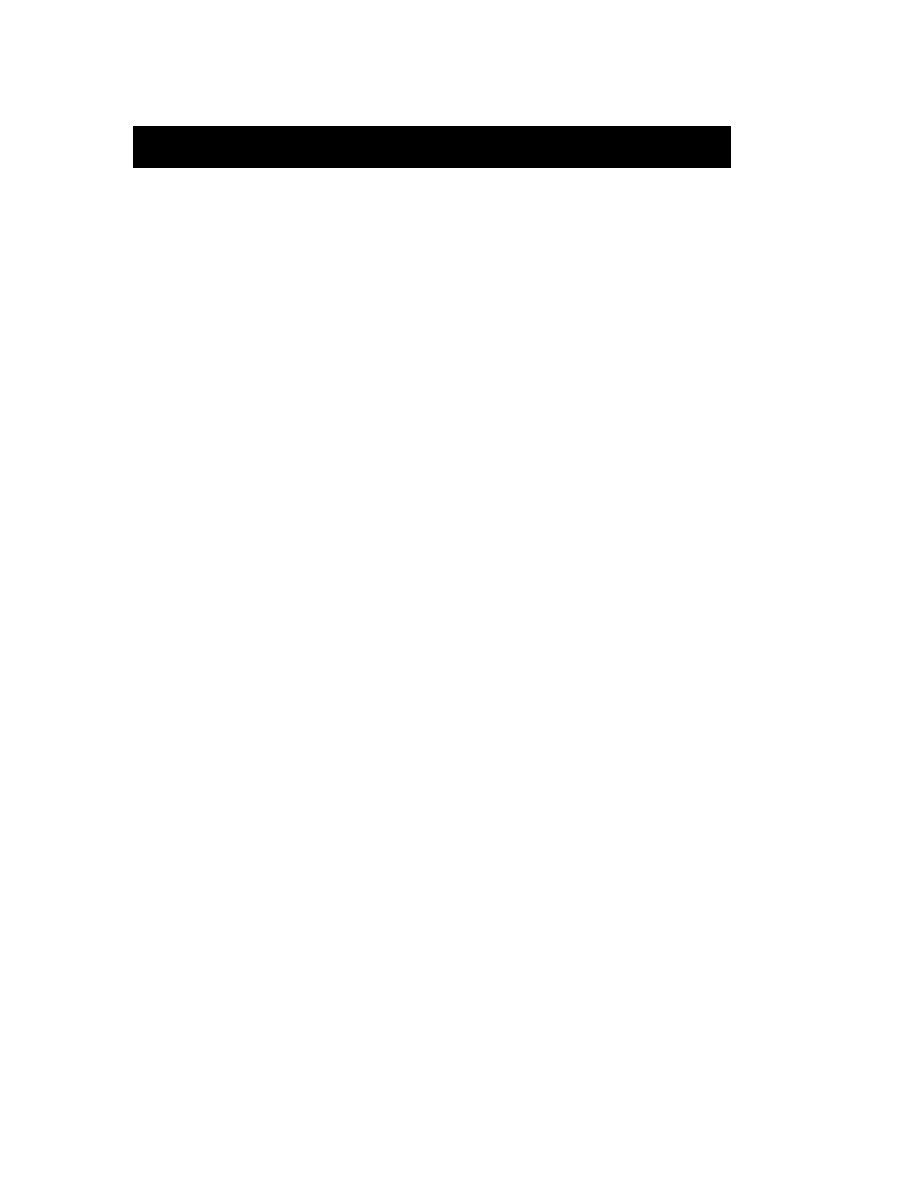
1.1.1
Low Level Control
Figure 1.1 depicts the simplest controller on the HMMWV, PI position control. This is
needed to stabilize the system once the actuators are powered. There are 4 independent
controllers, one for each wheel. For coordinated motion there is a central, desired
position generator.
2
LHR
PID
RHR
PID
RideHeight Generator
LHF
PID
RHF
PID
Desired Motion
{pos}
{d
e
s pos
it
io
n}
{spl cmd}
LHR
PID
LHR
PID
RHR
PID
RHR
PID
RideHeight Generator
LHF
PID
LHF
PID
RHF
PID
RHF
PID
Desired Motion
{pos}
{d
e
s pos
it
io
n}
{spl cmd}
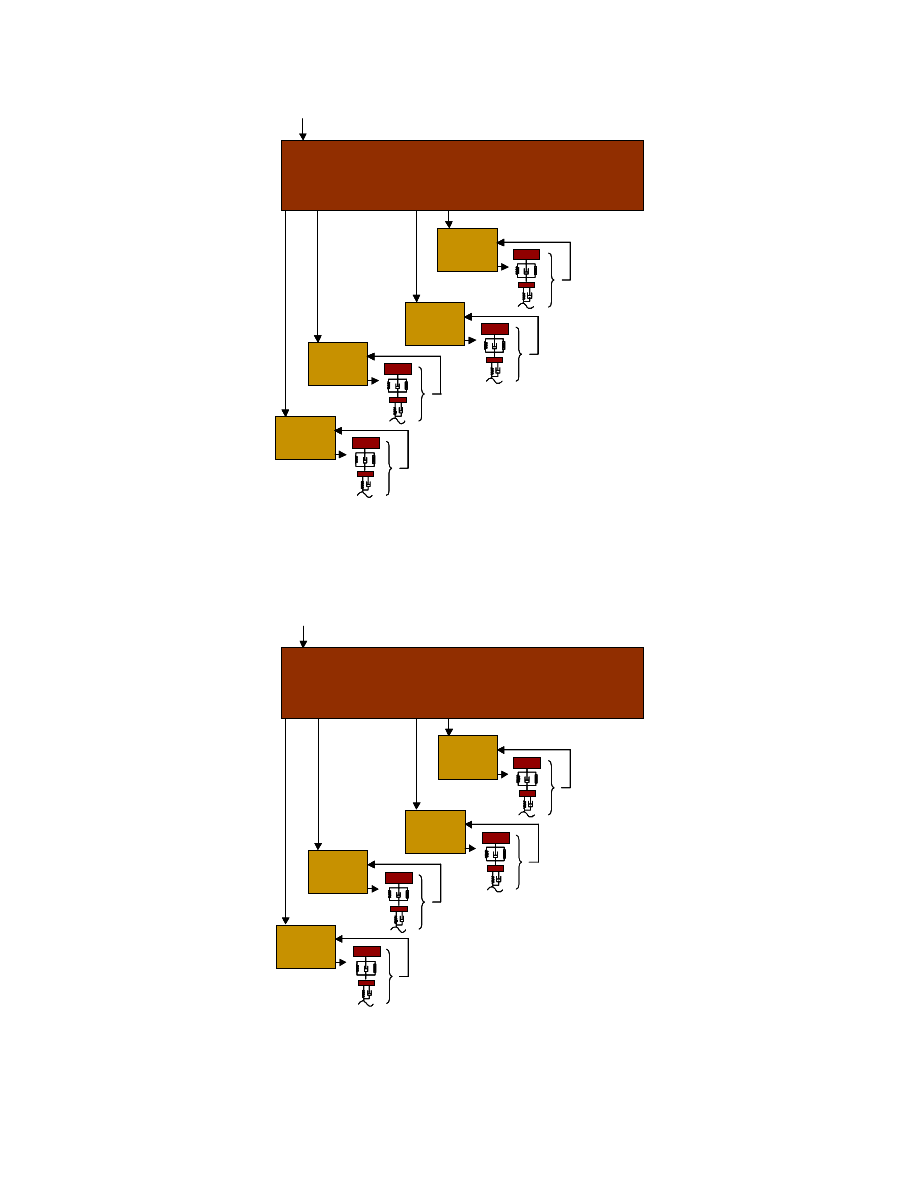
Figure 1.1: Diagram of PI control structure, 4 sensors required
Replacing the PI controllers with Force Tracking Controllers (FTC’s) one obtains the
FTC validation mode. Note that more sensors are needed but the structure is the same.
LHR
FTC
RHR
FTC
Force Generator
LHF
FTC
RHF
FTC
Desired Motion
{pos, frc, spl volt}
{d
e
s f
o
rce
}
{spl cmd}
LHR
FTC
LHR
FTC
RHR
FTC
RHR
FTC
Force Generator
LHF
FTC
LHF
FTC
RHF
FTC
RHF
FTC
Desired Motion
{pos, frc, spl volt}
{d
e
s f
o
rce
}
{spl cmd}
Figure 1.2: Diagram of FTC structure, 12 sensors required
3
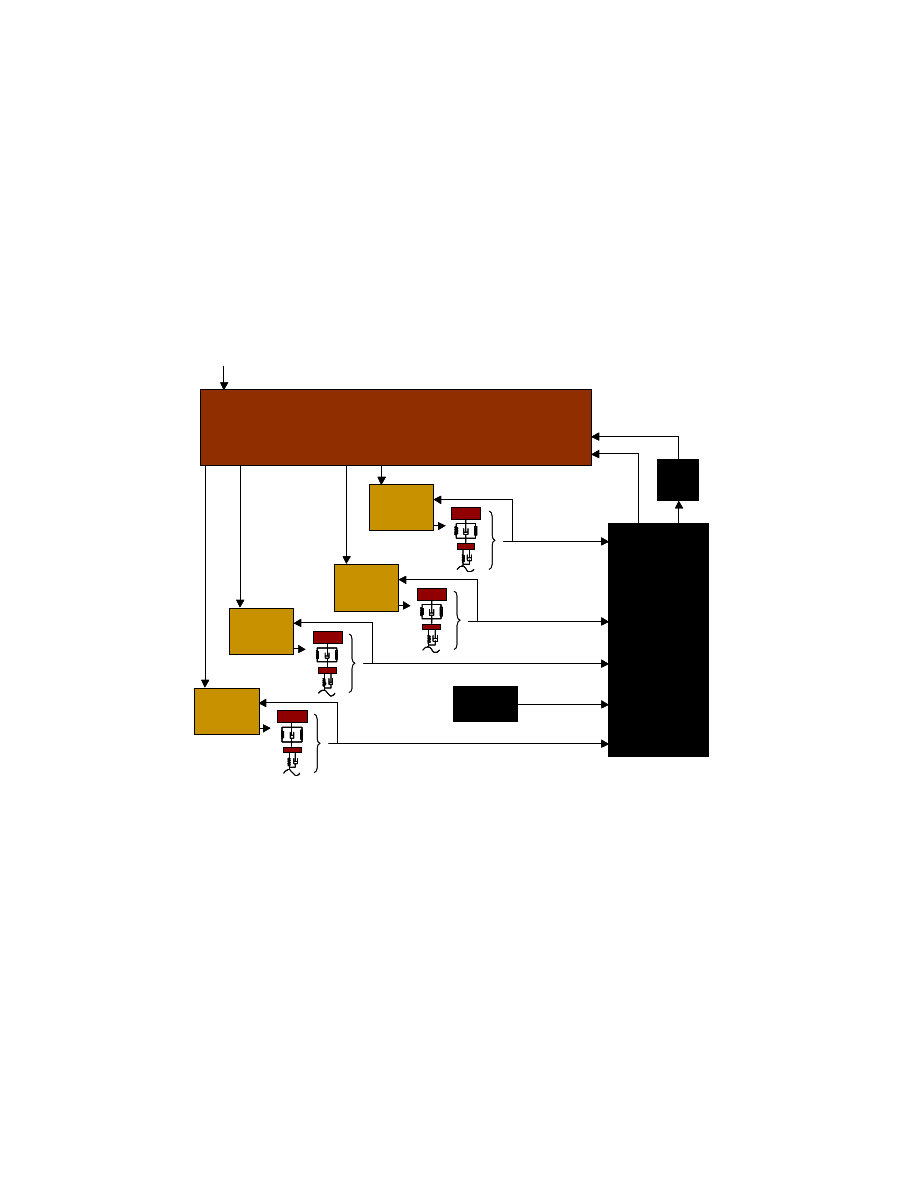
1.1.2
Control without Preview
When running just the lower level controllers, a profile generator is used to create the
desired trajectories. To make the system responsive, a high-level control algorithm
replaces this profile generator. In general these schemes require information about the
full car vehicle states. Or if not, using full sensor information and a Kalman filter
enhances the information they do use.
Kalman
Filter
HRF
MPC – SkyHook – LQR – VDC*
Performance Criteria
{pos, frc, spl volt}
{cha accel,
p&r rates}
{pos, frc,
hub accel}
{abs power}
{14 states}
{d
e
s f
o
rc
e
}
* VDC uses a controller other than FTC
{spl cmd}
Chassis
Sensors
LHR
FTC
RHR
FTC
LHF
FTC
RHF
FTC
Kalman
Filter
HRF
MPC – SkyHook – LQR – VDC*
Performance Criteria
{pos, frc, spl volt}
{cha accel,
p&r rates}
{pos, frc,
hub accel}
{abs power}
{14 states}
{d
e
s f
o
rc
e
}
* VDC uses a controller other than FTC
{spl cmd}
Chassis
Sensors
LHR
FTC
LHR
FTC
RHR
FTC
RHR
FTC
LHF
FTC
LHF
FTC
RHF
FTC
RHF
FTC
Figure 1.3: Diagram of higher level control structure, 20 sensors required
The Velocity Damping Controller (VDC) scheme offered in Figure 1.3 will not be
discussed any further. It is provided here as an alternative to the force based control
paradigms. VDC attempts to dampen chassis motion by converting axle acceleration to a
desired suspension velocity. A low-level controller comparable to the FTC, described in
Chapter 2, is necessary to implement the VDC.
4
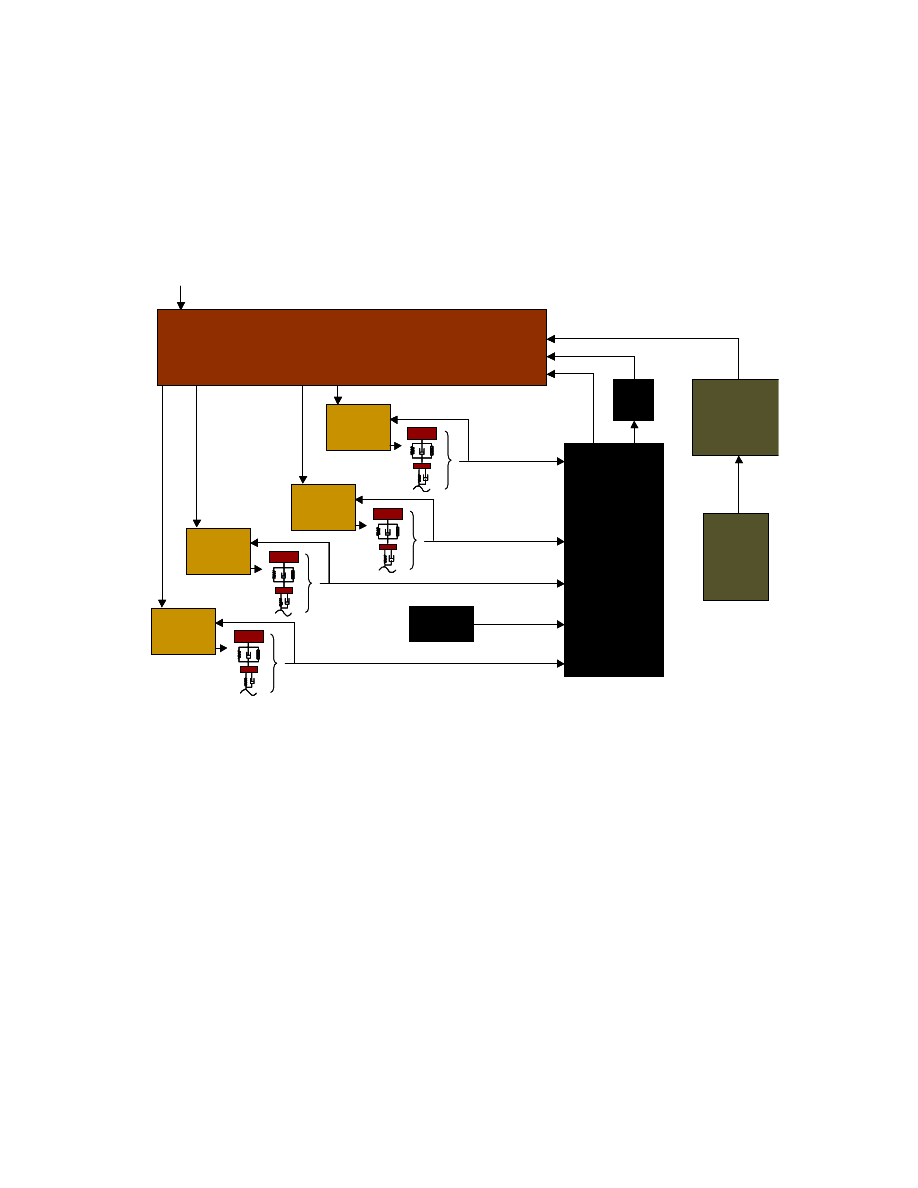
1.1.3 Preview
Control
With the controllers of the previous sections well tuned, the preview information is
added. The sensor data must be corrected for vehicle motion at the time of measurement
and buffered until the higher-level controllers need it. More detail on these subsystems is
provided in Chapter 3.
Kalman
Filter
HRF
Preview
Sensors
HPR
Correction
& Buffer
Chassis
Sensors
LHR
FTC
RHR
FTC
MPC
p
- FSLQ
p
LHF
FTC
RHF
FTC
Performance Criteria
{pos, frc, spl volt}
{cha accel,
p&r rates}
{pos, frc,
hub accel}
{abs power}
{14 states}
{preview}
{d
e
s f
o
rc
e
}
{spl cmd}
Kalman
Filter
HRF
Preview
Sensors
HPR
Correction
& Buffer
Chassis
Sensors
LHR
FTC
LHR
FTC
RHR
FTC
RHR
FTC
MPC
p
- FSLQ
p
LHF
FTC
LHF
FTC
RHF
FTC
RHF
FTC
Performance Criteria
{pos, frc, spl volt}
{cha accel,
p&r rates}
{pos, frc,
hub accel}
{abs power}
{14 states}
{preview}
{d
e
s f
o
rc
e
}
{spl cmd}
Figure 1.4: Diagram of preview control structure, 22 sensors required
The Frequency Shaped Linear Quadratic (FSLQ) Controller is a Linear Quadratic
Regulator (LQR) mathematically formulated in the presence of a frequency shaping
Human Response Filter (HRF), see Sections 4.3 & 3.4 respectively. An FSLQ
p
Controller can be designed to use the available preview information [20]. FSLQ
p
simulations were carried out by SSCI for realistic road profiles provided by TARDEC.
Performance was comparable with the MPC
p
but FSLQ
p
control does not explicitly
handle system constraints and will not be considered further.
5
1.2 HMMWV Equipment
Lotus Engineering, England, completed original instrumentation of the HMMWV. The
University of California at Berkeley added additional sensors and a new computer, see
Appendix A. Provided below are tables detailing the important information regarding the
sensor and actuator suites.
Vickers PV3-115 Hydraulic Pump
Supply Pressure
3000 psi
Flow Rate
45 liters/min
Power Consumption
< 32 hp @ < 3500 rpm
Table 1.1: Important hydraulic pump specifications
Qty
Sensor Type
Location
Measurement
4
Load Cell
Top mount of each actuator
Actuator forces
4
LVDT
Inside each actuator
Actuator displacement
4
Hub Accelerometer On each wheel hub
Axle vertical acceleration
2
Chassis
Accelerometer
Opposite corners of chassis
Chassis vertical
acceleration
2
Rate Gyro
Center console
Pitch and Roll rates
2
Range
Front of vehicle
Preview, distance to
ground
1
Speedometer
Engine compartment
Vehicle speed
Table 1.2: Essential HMMWV sensors
The processor suite of choice is the dSpace Autobox components described below. More
information on the processors and configurations is provided in Appendix B.
Digital Signal Processing Boards:
DS1003: TI TMS320C40 Parallel 60MHz DSP board
DS1004: DEC Alpha AXP21164 300MHz DSP board
6
Chapter 2 - FTC Design
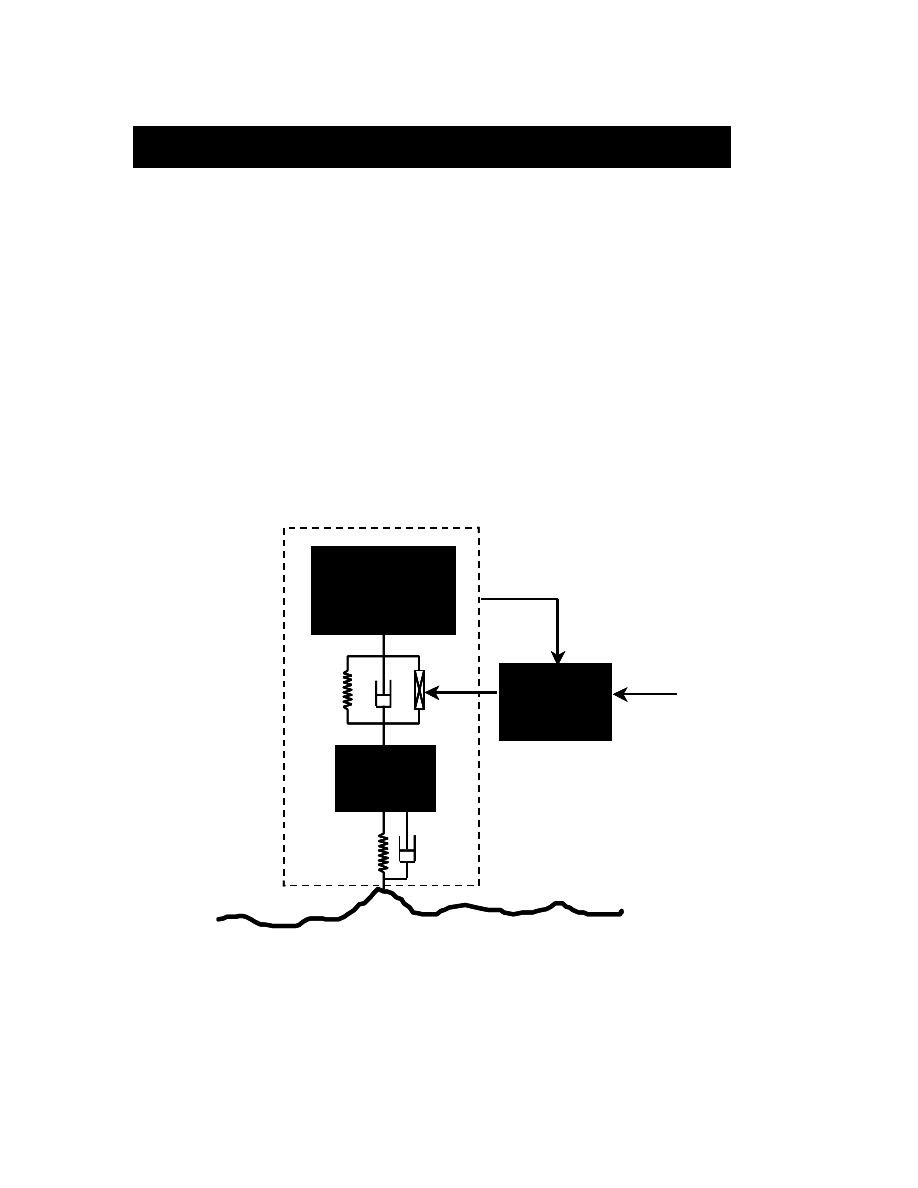
2.1 Overview of Controller
The force-tracking controller regulates the force of an individual actuator to the desired
force prescribed by a higher-level controller. Although the higher-level controller may
make decisions based upon the full car model, it is sufficient to only consider the quarter
car dynamics when designing a controller for a single actuator. For the actual system, the
added dynamics due to full car motion may be considered as model errors. A method to
compensate for these model errors is presented at the end of the controller formulation.
Force
Control
Fdes
udes
1/4 Vehicle
measurements (1 msec)
Sprung
Mass
Unsprung
Mass
kt
bt
ks bs
F
Force
Control
Force
Control
Fdes
udes
1/4 Vehicle
measurements (1 msec)
Sprung
Mass
Unsprung
Mass
kt
bt
ks bs
F
Sprung
Mass
Sprung
Mass
Unsprung
Mass
Unsprung
Mass
kt
bt
kt
bt
ks bs
F
ks bs
F
Figure 2.1: Diagram of force tracking controller system
7
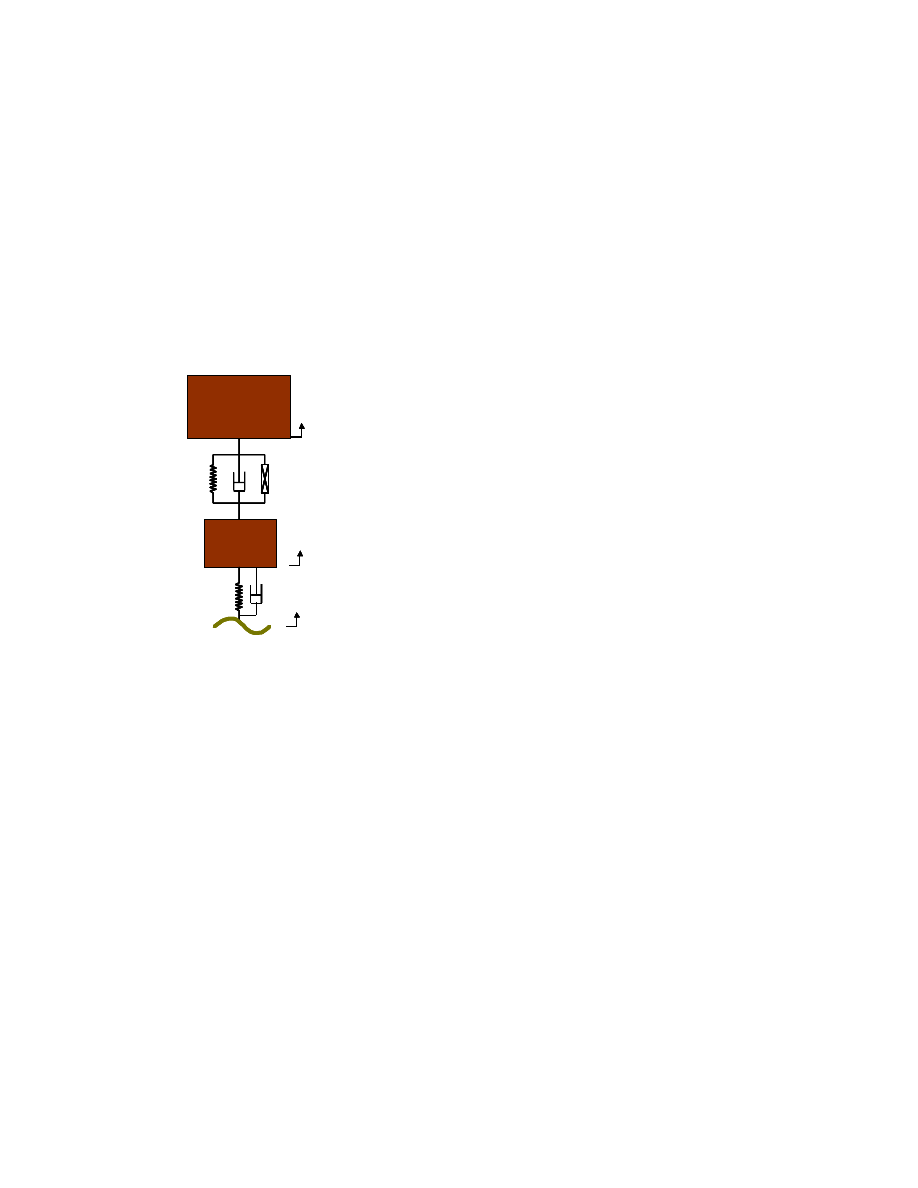
2.2 Plant Models
2.2.1 Quarter
car
A standard quarter car model was used, see Figure 2.2 for schematic and dynamic
equations. One item to note is the existence of a pure damping element in parallel with
the hydraulic actuator. In a typical application the shock is removed. However, the
simulation behaves closer to the actual system when a pure damping element with a low
damping coefficient is used.
s
s
f
a
s
u
s
s
u
s
ms
x
m
F
F
x
x
k
x
x
c
F
&&
&
&
=
−
+
−
+
−
=
∑
)
(
)
(
s
s
x
x &,
u
u
x
x &,
r
r &,
Sprung
Mass
Unsprung
Mass
kt
bt
ks bs
F
s
s
x
x &,
u
u
x
x &,
r
r &,
s
s
x
x &,
s
s
x
x &,
u
u
x
x &,
u
u
x
x &,
r
r &,r
r &,
Sprung
Mass
Unsprung
Mass
kt
bt
ks bs
F
Sprung
Mass
Unsprung
Mass
kt
bt
ks bs
F
Sprung
Mass
Sprung
Mass
Unsprung
Mass
Unsprung
Mass
kt
bt
kt
bt
ks bs
F
ks bs
F
u
u
f
a
u
s
s
u
s
s
u
t
u
t
mu
x
m
F
F
x
x
c
x
x
k
x
r
k
x
r
c
F
&&
&
&
&
&
=
+
−
−
+
−
+
−
+
−
=
∑
)
(
)
(
)
(
)
(
Figure 2.2: Diagram and equations for the quarter car model
It is convenient to define the state vector as follows when writing these equations in state
space:
]
,
,
,
[
s
s
u
u
u
x
x
x
x
x
r
&
&
−
−
=
β
(2.1)
2.2.2 Hydraulic
actuator
The hydraulic actuators are governed by electro hydraulic servovalves and are mounted
in parallel to the passive suspension springs, allowing for the generation of forces
between the sprung and unsprung masses.
The electro hydraulic system consists of an actuator, a primary power spool valve and a
secondary bypass valve. As seen in Figure 2.3, the hydraulic actuator cylinder lies in a
follower configuration to a critically centered electro hydraulic power spool valve with
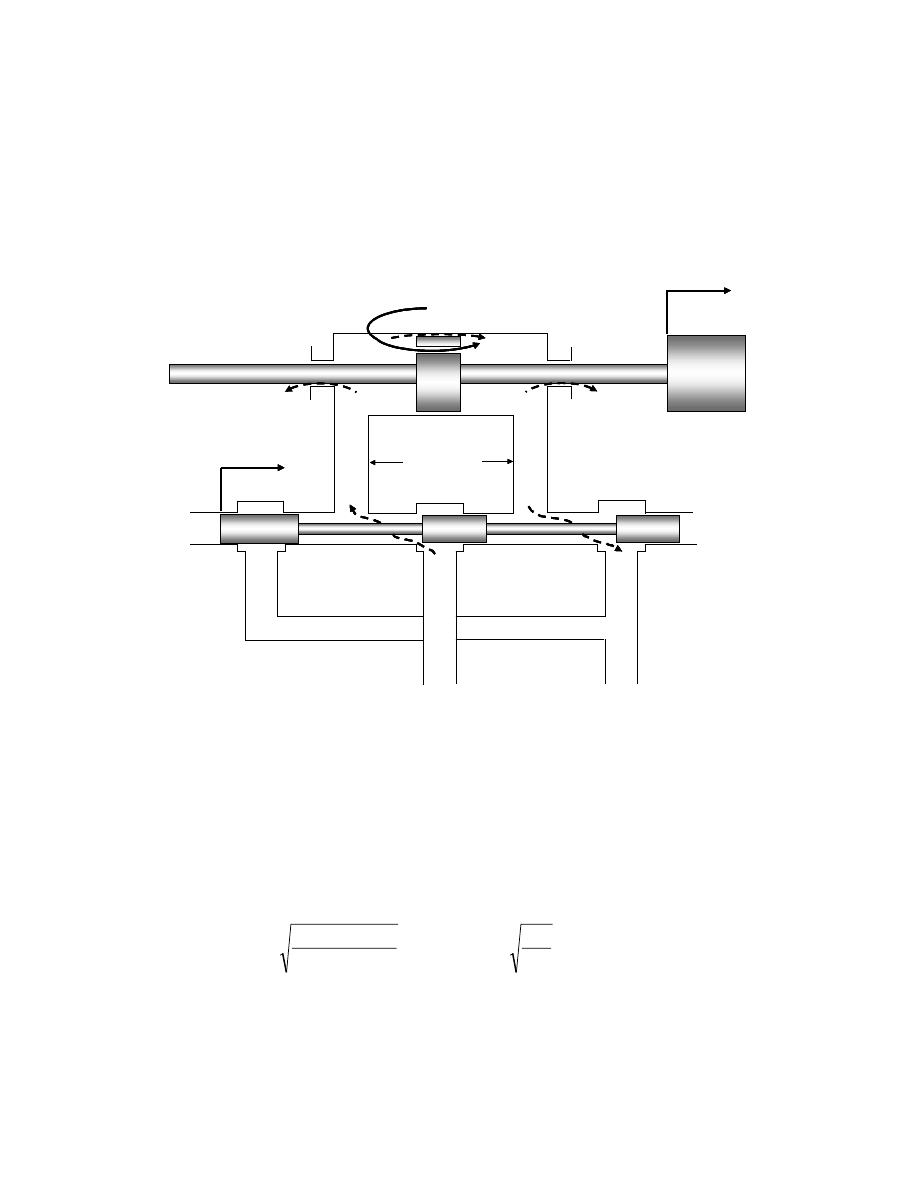
8
matched and symmetric orifices. Positioning of the spool u
1
directs high pressure fluid
flow to either one of the cylinder chambers and connects the other chamber to the pump
reservoir. This flow creates a pressure difference P
L
across the piston. This pressure
difference multiplied by the piston area A
p
is what provides the active force F
A
for the
suspension system.
Spool
Piston
P
1
Q
1
P
L
= P
1
- P
2
Supply
Return
P
S
P
R
Q
2
P
2
V
1
V
2
C
em
P
1
C
em
P
2
C
im
P
L
F
A
u
1
u
2
A
p
Spool
Spool
Piston
P
1
Q
1
P
L
= P
1
- P
2
Supply
Return
P
S
P
R
Q
2
P
2
V
1
V
2
C
em
P
1
C
em
P
2
C
im
P
L
F
A
u
1
u
2
A
p
Figure 2.3: Physical schematic and variables for the hydraulic actuator.
Dynamics for the hydraulic actuator [15] valve are given below. Parameter definitions
and experimental values are given in the Glossary. The change in force is proportional to
the position of the spool with respect to center, the relative velocity of the piston, and the
leakage through the piston seals. A second input u
2
may be used to bypass the piston
component by connecting the piston chambers.
)]
(
2
)
sgn(
)
sgn(
[
2
2
1
1
1
u
s
p
L
tm
L
L
d
L
S
d
p
A
x
x
A
P
C
P
P
u
C
P
u
P
wu
C
A
F
&
&
&
−
−
−
−
−
=
ρ
ρ
α
(2.2)
The bypass valve u
2
could be used to reduce the energy consumed by the system. If the
spool position u
1
is set to zero, the bypass valve and actuator will behave similar to a
9
variable orifice damper. For the purposes of proving the viability of the FTC the bypass
valve input u
2
is set to zero during experiments.
Spool valve positions u
1
and u
2
are controlled by a current-position feedback loop. The
essential dynamics of the spool have been shown to resemble a first order system forced
by a voltage for frequencies less than 15 Hz [7].
kv
u
u
=
+
&
τ
(2.3)
2.2.3 Complete
system
The system to be controlled by the FTC is the combined quarter car plant and hydraulic
actuator; spool voltage is the control input. Defining the state x
5
= P
L
= F
A
/A
p
and
choosing the state vector (2.4) the state space representation of the system can be written
as in Figure 2.4. Suspension friction and road disturbance are considered model errors
and are not shown here.
]
,
,
,
,
,
[
1
u
A
F
x
x
x
x
x
r
X
p
A
s
s
u
u
u
&
&
−
−
=
(2.4)
V
k
X
C
A
A
m
A
m
c
m
k
m
c
m
A
m
c
m
k
m
c
c
m
k
X
tm
p
p
s
p
s
s
s
s
s
s
u
p
u
s
u
s
u
s
t
u
t
+
Φ
+
−
−
−
−
−
−
−
+
−
−
=
τ
τ
α
α
α
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
1
0
0
0
0
0
0
1
0
&
ρ
α
5
6
6
)
sgn(
x
x
P
wx
C
where,
s
d
−
=
Φ
Figure 2.4: FTC plant dynamics in state space form

10
2.3 Control Algorithms
As seen in Figure 2.4 there is a severe non-linearity
Φ
in the dynamic behavior of the
system. The most direct approach to solving this problem is dynamic surface control [3].
However, as will be developed, this method results in some undesirable internal
dynamics. The concept of Output Redefinition (ORD) is one solution to this problem.
Using ORD makes it possible to adaptively determine the value of the suspension
damping, c
s
, in Figure 2.2 [14]. Simulation and implementation issues are addressed as
well.
2.3.1
Dynamic Surface Control
In general, dynamic surface control reduces an n
th
order system to n 1
st
order systems.
The output is differentiated with respect to time. Controllers are chosen to regulate a
synthetic control input for each differentiation step. Progressive synthetic input choices
should be one derivative closer to the real system input. If the input appears after m<n
steps then there are n-m internal dynamic states. A controller is designed for each of the
m 1
st
order systems. Since there are no controllers for the internal dynamics, it is
essential that the internal dynamics be well behaved. Dynamic surface control typically
utilizes a sliding surface controller for each of the m 1
st
order surfaces. If necessary,
input-output linearization could be applied to system prior to the dynamic surface control
method. Input-output linearization often results in the undesirable differentiation of
model errors. For more information on dynamic surface control consult reference [17].
For the system in Figure 2.4, the control enters through the spool voltage. Appling the
method described above, the resulting system has relative degree 2 and thus 4 internal
dynamics states. In this case, the internal dynamics are precisely those of the quarter car
suspension system. These dynamics are marginally stable and thus highly oscillatory due
to the lack of a pure, physical damping element. Since there exists a direct feedback path
from suspension velocity to hydraulic actuator force, Equation (2.2), the suspension
oscillations could result in undesirable force tracking performance [4].
11
Derivation of Control Law
The output F
A
was differentiated with respect to time until the control input appeared.
The resulting controller surfaces are
spool
p
u
&
A
A
L
F
P
=
(2.5)
For the P
L
surface, an integral term was added to the standard definition of s. The
integral term, weighted by 0 <
λ
1
< 1, slightly attenuates control noise.
d
5
x
x
x
where
dt
x
x
s
5
5
5
1
5
1
~
~
~
−
=
+
=
∫
λ
(2.6)
Applying the sliding surface approach, the control law must satisfy the condition in
Equation (2.7) to ensure asymptotic tracking of F
des
.
(
)
2
1
1
5
1
5
1
1
1
~
~
s
x
x
s
s
s
η
λ
−
≤
+
=
&
&
(2.7)
Plugging in the equation of dynamics for
d
x
5
&
and solving for u
des
:
(
)
{
}
1
1
5
1
5
5
2
4
~
1
s
x
x
x
C
x
x
A
u
d
tm
p
des
η
λ
α
α
−
−
+
+
−
Φ
=
&
(2.8)
In Equation (2.8) the desired force profile enters through the terms
d
x
5
&
and s
1
. Because
the time derivative of the desired force is used in control computation, it is important for
the force profile to be smooth.
Following the method used for the P
L
surface, the equation for control input V can be
obtained as follows:
(
)
2
2
2
2
2
2
2
s
u
u
s
s
s
u
u
s
des
des
η
−
≤
−
=
−
=
&
&
&
(2.9)
Substituting the equation of dynamics for
u&
into Equation (2.9) and solving, the control
input is thus:
{
}
2
2
1
s
u
u
k
V
des
τ
η
τ
−
+
=
&
(2.10)
The time derivative of u
des
is needed to compute the control input V. Using the filter of
Equation (2.11) allows theoretical proof that the resulting controller is asymptotically
stable.
12
τ
ψ
ψ
−
=
des
u
&
(2.11)
ψ
&
is used in place of
des
u
&
ψ
is maintained via forward
Euler integration of
ψ
&
.
In theory, the sliding surface gains
i
η
are chosen to overcome the worst-case model and
disturbance errors. In practice, the control input is limited by system capabilities; see
Section 2.5 for more details.
2.3.2 Output
Redefinition
Dynamic surface control ensures asymptotic tracking of the desired profile provided the
sliding surface gains,
η
i
, can be made sufficiently high as to overpower any errors.
Output redefinition reduces model errors by directly considering the lack of a pure
damping element in the system. The output is modified such that an artificial damping
term is added to the system. As per Osorio et al [14] the modified output can be written
as
[
]
v
v
A
s
u
v
A
m
k
k
K
and
F
y
where
K
y
x
x
k
F
y
−
=
=
−
=
−
−
=
0
0
)
(
β
&
&
(2.12)
New synthetic inputs are developed for the modified system by using suspension
measurements. New desired outputs are obtained by using the quarter car model to
compute the expected suspension terms. The gain k
v
is chosen such that the state
feedback matrix (PK+Q), in Equation (2.14), is Hurwitz. The general procedure for
developing the control law using the modified output is explained below, more detail is
given in the reference sited above. For instance, Osorio et al [14] proves that if a
controller is designed to asymptotically track the modified output then the original output
is also obtained.
Controller derivation begins by writing the internal dynamic equations in matrix form,
using the vector
β
from Equation (2.1), the upper 4x4 matrix Q from Figure 2.4, and
[
]
T
1
0
1
0
s
u
m
m
P
−
=
to obtain:

13
β
Q
Py
β
+
=
&
(2.13)
From Equation (2.12) and Equation (2.13) it follows that
β
β
β
)
(
Q
PK
Py
K
F
y
m
A
m
+
+
=
−
=
&
&
&
&
(2.14)
Now, deriving the sliding approach for the y
m
surface:
des
m
m
y
y
s
−
=
1
1
1
1
)
)
(
(
s
y
Q
PK
Py
K
F
s
des
m
m
A
η
β
−
=
−
+
+
−
=
&
&
&
(2.15)
Substituting the valve dynamics of Equation (2.2) into Equation (2.15), the control law is
found to be
(
)
[
]
{
}
1
1
2
4
)
(
1
s
y
Q
PK
Py
K
F
C
x
x
A
u
des
m
m
A
tm
p
des
η
β
α
α
−
+
+
+
+
+
−
Φ
=
&
(2.16)
The sliding surface controller developed above provides a method to compensate for the
lack of a pure, physical damping element in the system. This surface is a modified form
of the P
L
=F
A
/A
p
surface of the original FTC formulation, Equation (2.8).
2.3.3 Parameter
Adaptation
Several times throughout this derivation the need for a pure damping element in the
suspension models and controllers has been mentioned. Since there is no physical
damper it is difficult to estimate what the proper amount of damping should be; here, an
adaptive algorithm is derived for this purpose. The methodology can also be used to
estimate other system parameters, provided the parameters are estimated individually.
Derivation of Update Law
The parameter c
s
appears in the redefined output dynamic Equation (2.12) not in the
original output P
L
. Thus, the redefined output will be used. Dynamics written in terms
of c
s
are
{ }
(
)
)
(
...
4
2
x
x
m
c
k
F
y
eq
s
v
A
m
−
−
+
=
s
s
c
c
where
∆
+
=
ˆ
c
s
(2.17)
Using the sliding surface as described in Equation (2.15) and the Lyapunov like function:

14
2
2
2
2
1
s
c
s
∆
+
=
ρ
l
(2.18)
Differentiating Equation (2.18), substituting
s&
from Equation (2.15), and using the
control law (2.16) we obtain (2.19). The system uses c
s
, the controller uses
s
cˆ , and
0
=
s
c
&
.
(
)
s
eq
s
c
s
m
x
x
c
s
&
l&
ˆ
)
(
1
4
2
2
1
1
ρ
η
−
−
∆
+
−
=
(2.19)
To ensure that Equation (2.19) is negative semi-definite we must cancel the second term.
Thus the parameter update law is
2
1
1
4
2
)
(
ˆ
s
s
m
x
x
c
eq
s
η
ρ
−
=
⇒
−
=
l&
&
(2.20)
Since the estimate of c
s
is time varying and the Lyapunov function time derivative is only
negative semi-definite, Barbalat’s lemma must be applied:
bounded
is
s
s
2
-
b/c
continous
uniformly
is
definite
-
semi
negative
is
zero
by
bounded
lower
is
&
l&&
l&
l&
l
σ
=
•
•
•
(2.21)
Thus, the parameter c
s
may be adaptively determined. Unfortunately, sliding surface s
1
does not converge in simulation or in implementation. Thus, the parameter c
s
does not
converge either.
2.4 Simulation
Before implementing the controller on the HMMWV the control code was tested via
Simulink simulation.
2.4.1 Setup
Below is an image of one Simulink model used to simulate controller performance. The
plant dynamics of the quarter car and hydraulic valve are simulated given an erroneous
set of parameters. Road input and suspension friction disturbances are also added to the
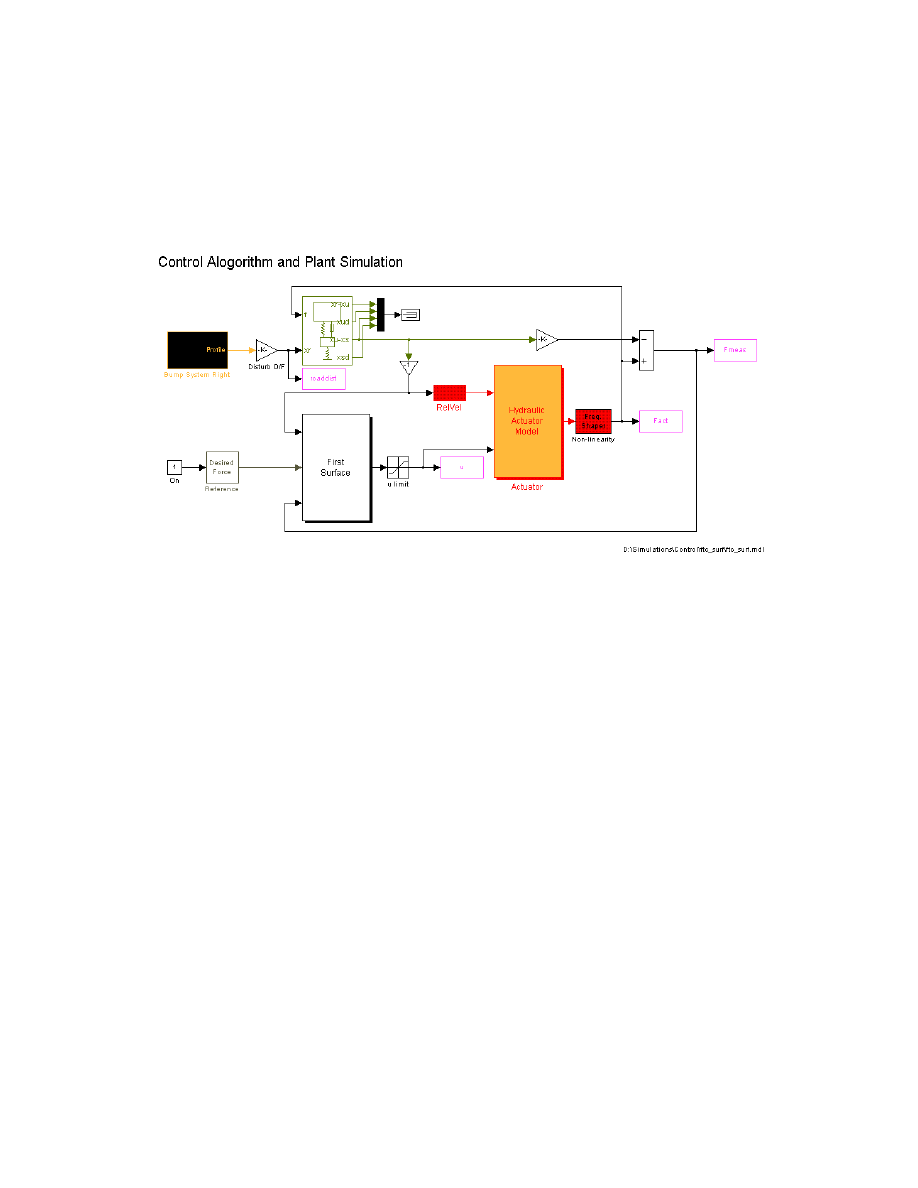
15
plant. The controller used the correct, fixed set of parameters, and the only allowable
modification to the control algorithm was an increase in the sliding surface gains,
η
i
.
Spool voltage is limited to
±
10 Volts. Sliding surface gains should not be increased as to
cause control input saturation.
Figure 2.5: Simulink FTC simulation setup, quarter car plant
2.4.2
Model Error Approximation
Without the existence of significant model error the controller simulation would, and did,
result in perfect tracking. Experimental data depicted considerable model error in the
range of 1Hz to 5Hz. The most likely cause of this is the un-modeled, full car resonant-
mode, dynamic feedback from the suspension relative velocity to the actuator chamber
pressure. To compensate for this, a model error filter was created, the “Freq. Shaper”
block in Figure 2.5. System output was attenuated at 1Hz and amplified at 5Hz by two,
second order filters in series. For dynamic surface control it is required that the error be
additive to a nominal plant. If the phase error is neglected then the filter error is in that
form and the controller is still theoretically viable.
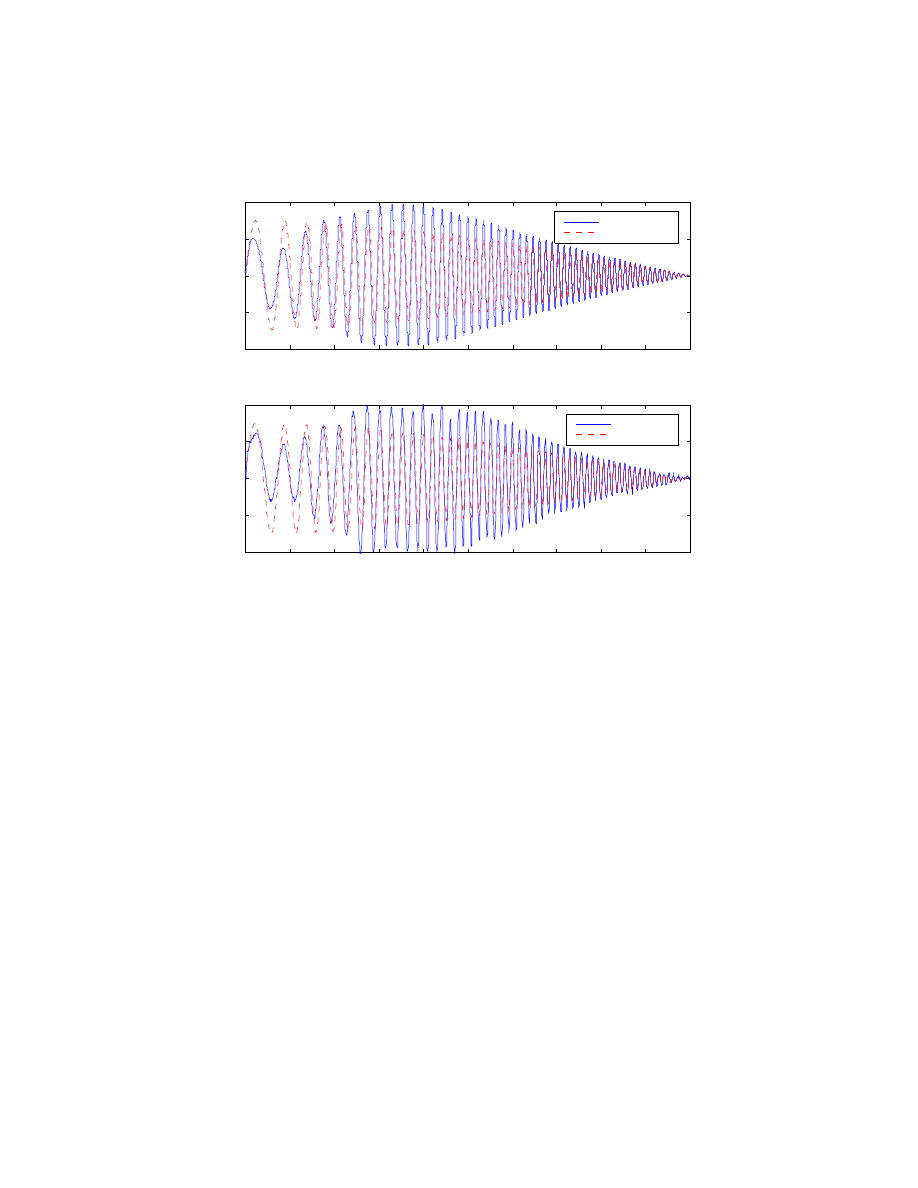
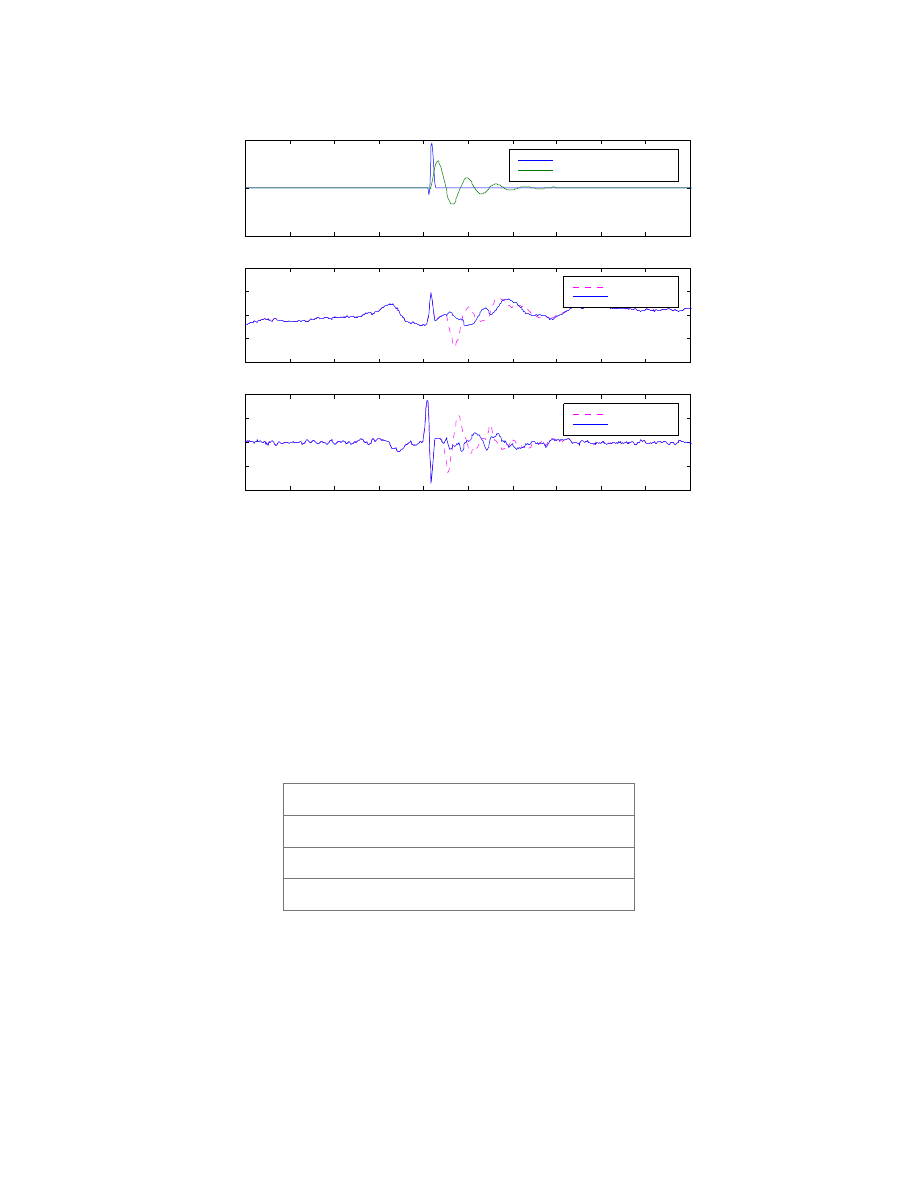
The same controller, gains, and parameters were used both in simulation and on the
physical system. The plot below depicts comparable error dynamics; the dotted line is
16
the desired trajectory. With the model error filter, simulation results are more accurate
representations of what the HMMWV will do given a specific controller.
0
1
2
3
4
5
6
7
8
9
10
−1000
−500
0
500
1000
Force (N)
Simulated & Experimental Force Tracking Control Output
Simulated
Desired
0
1
2
3
4
5
6
7
8
9
10
−1000
−500
0
500
1000
Force (N)
Time (sec)
Actual
Desired
Figure 2.6: Plot of simulated (top) vs. actual (bottom) controller performance
2.4.3 Simulation
Results
Simulation of the control algorithm proved useful in debugging the code and also spurred
the development of a new, empirical control scheme. By creating the model error
approximation filter to make the simulation look like the actual system performance, it
was realized that the inverse filter could be used to improve tracking near the resonant
modes of the suspension, see Section 2.5.2.
2.5 Implementation
Tuning the FTC was an arduous process, exacerbated by the lack of accurate system
parameter information. Parameter information was not well documented and it was very

17
difficult to conduct parameter validation tests. That aside, the following modifications to
the theory proved useful.
2.5.1 Noise
Filters
The desired spool position command output by the first surface, P
L
, was very noisy. The
second surface amplified the noise and coincidently decreased sliding mode gains. It was
empirically determined that the filter in Equation (2.22) reduced control noise and
improved controller performance. With this filter, u'
des
replaced the u
des
command sent to
the second surface in Equation (2.9).
2
)
2
(
)
1
(
'
−
+
−
=
k
u
k
u
u
des
des
des
(2.22)
Another empirical study showed that numerical differentiation, Equation (2.23), of
des
u
&
worked better than the sliding mode filter described in Equation (2.11).
t
k
w
k
w
k
w
des
des
des
∆
−
−
=
)
1
(
)
(
)
(
&
(2.23)
2.5.2
Model Error Filters
The FTC formulation above treats the full car dynamics as a disturbance. Results
indicated that FTC performance around the resonant modes for chassis motion was poor.
Resonant frequency for the pitch and heave modes is around 2Hz and around 4Hz for the
roll mode. Filtering the u
des
command by a filter that attenuates inputs around these
frequencies improved force tracking. To implement these filters with high-level
controller force generation, a heave, pitch, and roll quantification scheme was used.
Ultimately, FTC tuning was improved to eliminate the need for these filters. Moreover,
MPC formulation considers these resonant frequencies when computing F
des
.
2.5.3
High-Level Control Filters
The hierarchical control inputs were generated at a 30ms sampling rate while the FTC ran
at 1ms. A 1ms sampling rate was necessary to ensure good tracking up to 8Hz as dictated
by the system time constants. For smooth convergence to F
des
, considering the derivative
18
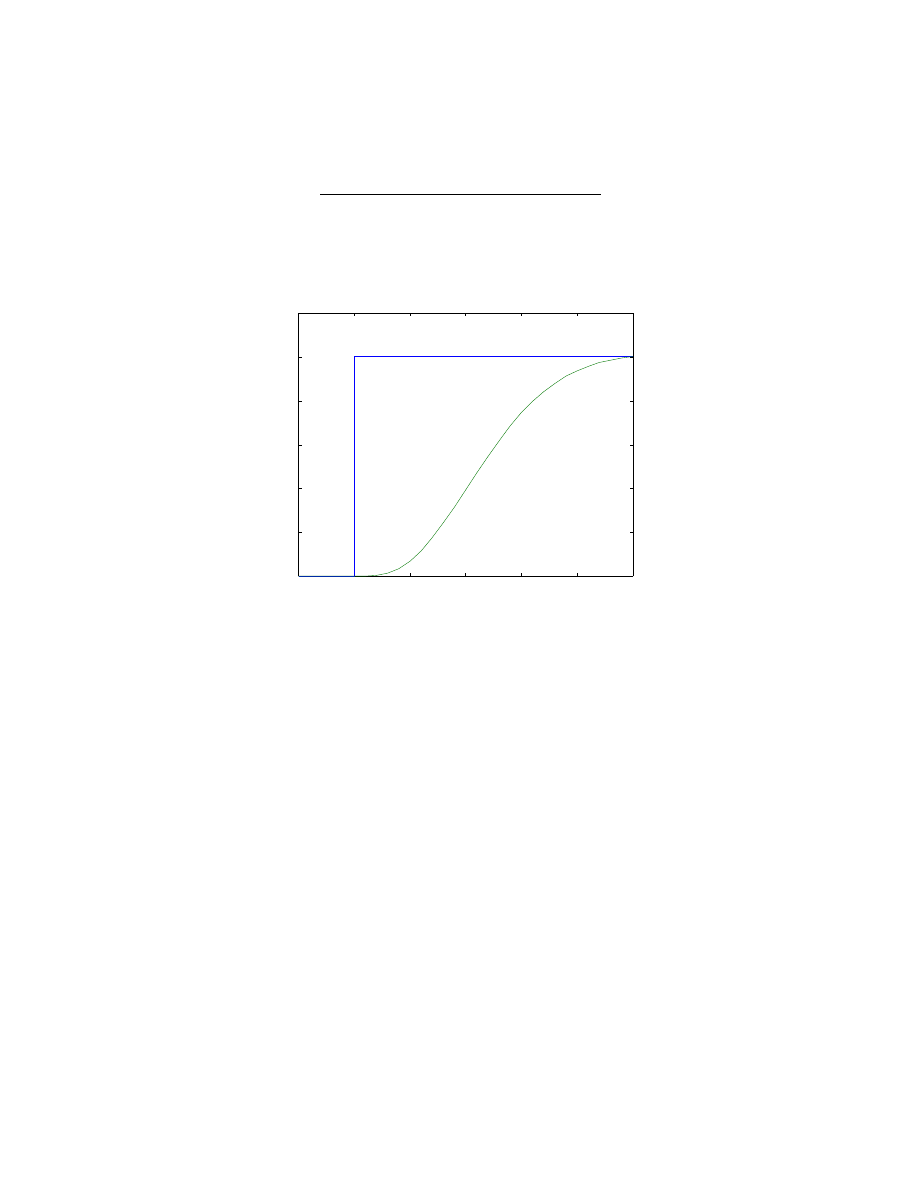
terms in Equation (2.8), the desired force was filtered by Equation (2.24), the rise time is
approximately 27ms.
9
4
.
6
7
6
.
7
385625
950
9
4
.
6
)
(
Fˆ
2
3
4
des
e
s
e
s
s
s
e
s
+
+
+
+
=
(2.24)
A plot of the filter step response is shown below for better understanding of filter
functionality.
0
0.005
0.01
0.015
0.02
0.025
0.03
0
200
400
600
800
1000
1200
Force (n)
Time (sec)
Step Response of Smoothing Filter
Figure 2.7: Plot of F
des
smoothing filter step response
19
Chapter 3 - Subsystems
Most of these systems are presented in other project reports; they are summarized here to
provide a more complete understanding of the system. However, components that
contain unique, personal, contributions are discussed in more detail. All of the systems
are necessary for the successful implementation of the MPC
p
controller.
3.1 Safety Systems
Emergency Shut Down
Two independent switches can affect a shutdown. One switch, near the driver, is a
software shutdown; it opens actuator bypass valves and damps the control output to zero
smoothly. The other toggle switch, by the passenger, is a hard shutdown; it is directly
wired to open the hydraulic pump bypass. With the bypass open no power is supplied to
the actuators. Typically, the first shutdown is sufficient to handle occasional controller
instabilities.
Signal Checking
This safety check alerts the driver that a sensor is disconnected. A bit of logic checks for
the existence of sensor noise on the respective input channel. No noise implies the sensor
is disconneceted.
3.2 Preview Information
The MPC
p
requires the road profile, Z
road
, and the rate that Z
road
is changing with respect
to time
road
Z&
for n preview steps, or preview horizon (pH), at each wheel. Road profiles
for each side of the car are stored in a buffer. When extracting preview data the buffer is
parsed and information of the current vehicle velocity and Z
road
are combined to create
road
Z&
. The HMMWV system has two methods to obtain Z
road
.
20
3.2.1 Preview
Generation
Preview generation can be used on courses with a known road profile, such as the test
track, see Appendix D. The preview buffer is fed a pre-stored profile in place of the
sensor preview data. The digital profile is synchronized to the actual profile using
standard HMMWV sensors. Below is a sample buffer output matched with peaks from
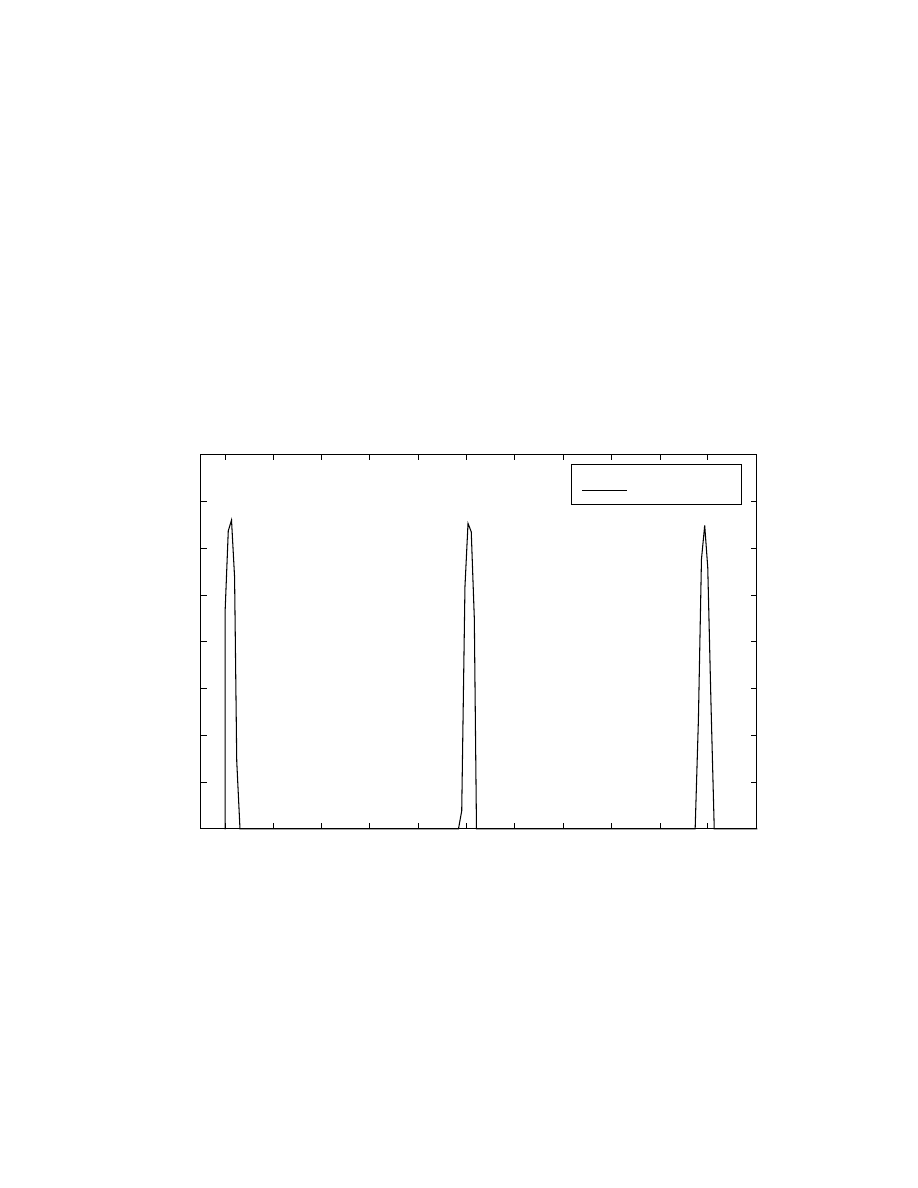
the suspension load cells. The trigger spikes indicate the most probable location of the
actual bump. This method relies on absolute position and is therefore susceptible to error
accumulation. At 10m the real bump is almost beyond the buffered preview generation
predicted location. To contrast, buffered sensor data requires only slightly more than the
length of the vehicle, at most 4m.
0
1
2
3
4
5
6
7
8
9
10
11
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
Dis tanc e Traveled [m ]
P
rof
il
e [
m
]
Trigger
B uffer Output
Figure 3.1: Plot of generated & buffered preview data matched with load cell peaks
3.2.2
Preview Sensor Correction
While preview generation makes debugging a bit easier, it is not useful in the proposed
application. For that we use preview sensors that measure the range to ground. Sensors
measurements must be converted to a road height. In practice the preview sensor mount,
21
rigidly attached to the chassis, see Appendix A, will have some heave, pitch and roll
(HPR). Assuming that the assembly is a rigid body with negligible warp, it is possible to
compensate for chassis motion by trigonometric relations. HPR are measured much
faster than the rate of change of HPR. Thus, it is reasonable to apply trigonometry
directly to the measurements, obtaining the following equations:
f
meas
road
bias
lat
long
sens
meas
sens
road
X
D
X
D
CG
CG
H
Z
D
Z
Z
+
−
=
+
−
−
=
−
−
=
)
sin(
cos
sin
sin
)
cos(
θ
α
α
φ
θ
θ
α
(3.1)
Where the variables are defined as
h
bias
D
meas
H
Z
road
Z
sens
αααα
CG
long
X
f
Θ =
Θ =
Θ =
Θ =
Pitch
Φ =
Φ =
Φ =
Φ =
Roll
X
road
h
bias
D
meas
H
Z
road
Z
sens
αααααααα
CG
long
X
f
Θ =
Θ =
Θ =
Θ =
Pitch
Φ =
Φ =
Φ =
Φ =
Roll
X
road
Figure 3.2: Diagram and nomenclature definition for preview correction
The set of values X
road
and Z
road
are now be fed to the buffer and used to attain proper
preview information for the MPC
p
.
Equations (3.1) rely on accurate HPR measurements to ascertain correct road
information. To be accurate, the HPR computation must also include the road profile
under the wheels. Experiments have shown that the problem is more complicated than
simply accounting for the road height under the wheel. Further discussion of this topic is
3.2.3 Preview
Buffer
Incoming road information is sorted, stored, and updated by the buffer with respect to
X
road
. Interpolated data is retrieved for the requested pH for each wheel.
22
Consecutive road data is not guaranteed to have an equal spacing or even a consistent
order. Graphically, the input to the buffer and buffer processing are depicted in Figure
current
sample
vehicle speed
V
k
Z
k+n
Z
k
Z
k+1
Z
k+2
Z
k+3
Z
k+4
Z
k+5
Z
k+n-1
distance
current
sample
vehicle speed
V
k
Z
k+n
Z
k
Z
k+1
Z
k+2
Z
k+3
Z
k+4
Z
k+5
Z
k+n-1
distance
Figure 3.3: Diagram of unevenly spaced road height samples
road profile
height
distance
Z
k+n
Z
k
Z
k+1
Z
k+2
Z
k+3
Z
k+4
Z
k+5
Z
k+n-1
road profile
height
Z
j
Z
j+1
Z
j+2
Z
j+3
Z
j+4
Z
j+m
T
T
T
T
T
total preview time
V
k
road profile
height
distance
Z
k+n
Z
k
Z
k+1
Z
k+2
Z
k+3
Z
k+4
Z
k+5
Z
k+n-1
road profile
height
distance
Z
k+n
Z
k
Z
k+1
Z
k+2
Z
k+3
Z
k+4
Z
k+5
Z
k+n-1
road profile
height
Z
j
Z
j+1
Z
j+2
Z
j+3
Z
j+4
Z
j+m
T
T
T
T
T
total preview time
road profile
height
Z
j
Z
j+1
Z
j+2
Z
j+3
Z
j+4
Z
j+m
T
T
T
T
T
total preview time
V
k
V
k
Figure 3.4: Interpolation and re-sampling of the road profile preview information
23
A standard velocity sensor is used to measure V
k
for the experimental HMMWV. In final
implementation, an accurate estimation of the ground speed is required to avoid errors
introduced by wheel slip, by wheel liftoff, and by loss of traction.
The buffer is fixed length, circulating memory. An integer increment in the array pointer
corresponds to a fixed increment in the physical distance. To improve the stochastic
properties of the buffer, new information is interpolated and updated, if necessary, with a
forgetting factor.
3.2.4
Preview Correction Modifier
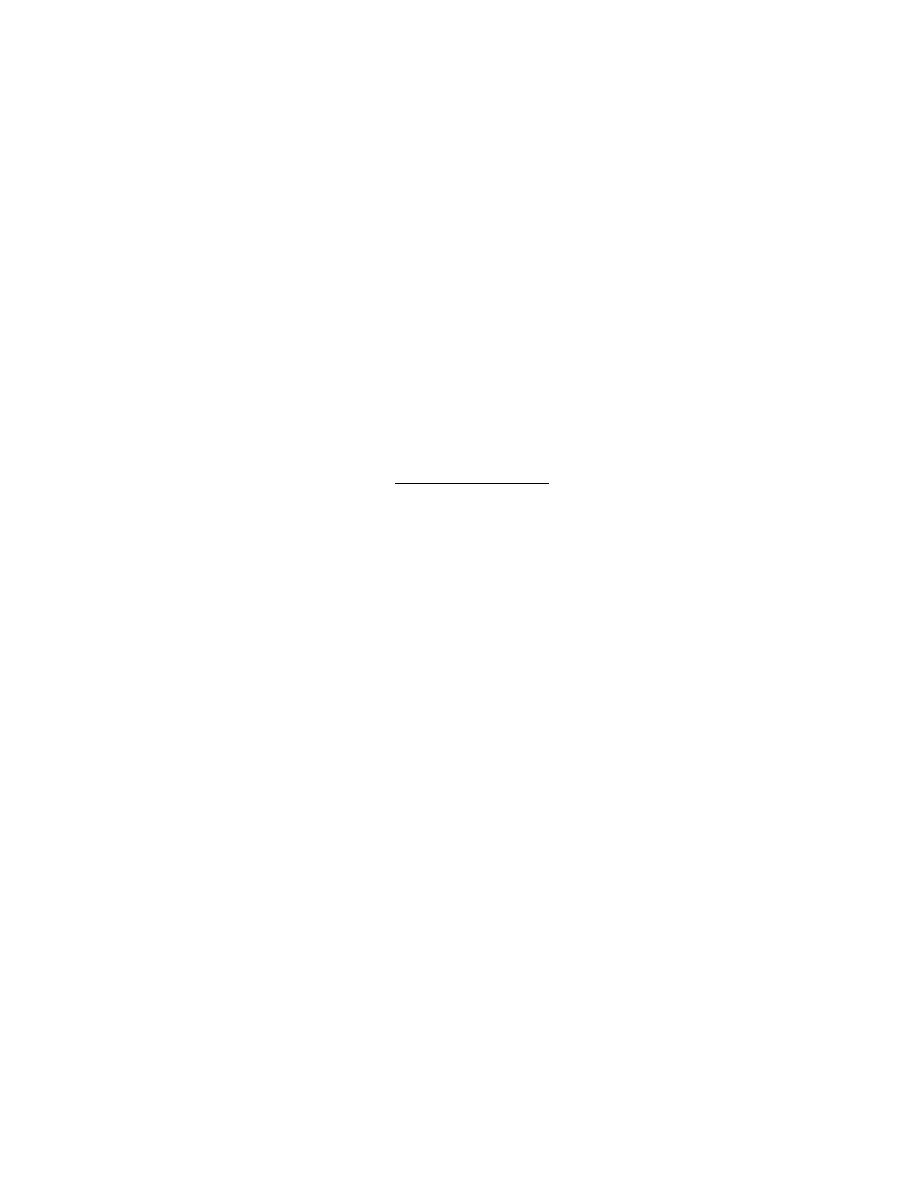
Information from the preview buffer will be used to help alleviate the problem observed
in Section 3.2.2. Figure 3.5 shows raw sensor data and the HPR corrected and buffered
road profile. HPR is computed with only road height information. Observe the negative
bump just after the actual bump in the Z
r
plot.
2
2.5
3
3.5
4
4.5
5
5.5
6
6.5
7
0.7
0.8
0.9
1
Range (m)
Simple Preview Correction
Sensor Data
2
2.5
3
3.5
4
4.5
5
5.5
6
6.5
7
−0.1
−0.05
0
0.05
0.1
z
r
(m)
Corrected & Buffered Data
2
2.5
3
3.5
4
4.5
5
5.5
6
6.5
7
−10
−5
0
5
10
z
r
dot (m/s)
Time (sec)
Corrected & Buffered Data
Figure 3.5: Plot of raw preview data and corrected & buffered preview outputs when using
simple HPR computation
24
The negative impression can be removed if compensation for tire dynamics is included in
the HPR computation. To do this, bump data is extracted from the buffered preview
information and fed to a quarter car system. Below is the system dynamics derived from
[
]
T
r
r
U
&
=
are the only system inputs and chassis heave
s
x is the output.
(
)
(
)
U
m
c
m
k
X
m
c
c
m
k
k
m
c
m
k
m
c
m
k
m
c
m
k
X
u
t
u
t
u
s
t
u
s
t
u
s
u
s
s
s
s
s
s
s
s
s
+
+
−
+
−
−
−
=
0
0
0
0
0
0
1
0
0
0
0
0
1
0
&
[
]
T
u
u
s
s
x
x
x
x
X
where
&
&
=
Figure 3.6: Plant dynamics for tire compensation
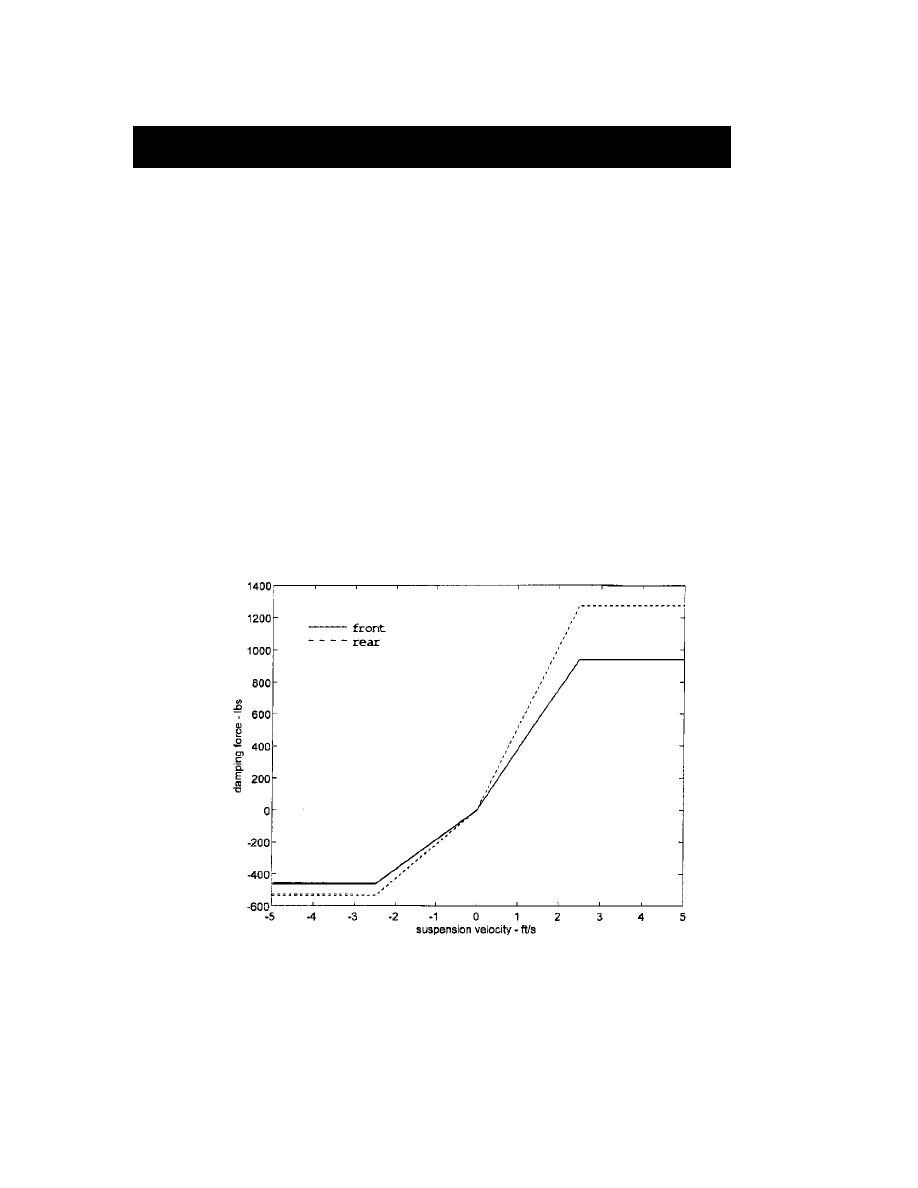
Now
s
x is used in the HPR computation and the results are shown in Figure 3.7. MPC
p
places the most weight on
r
Z
&
; in the final plot we see a tremendous improvement over
the original
r
Z
&
.
Results from this technique are promising but extracting the bump data from the preview
information is not a robust process. A better solution is to use this knowledge to modify
the KF and attain better HPR estimates. Thus far, HPR have been computed with LVDT
data (suspension expansion sensor data), as the LVDT correction was much better than
the correction obtained by using the HPR data from the KF.
25
2
2.5
3
3.5
4
4.5
5
5.5
6
6.5
7
−0.05
0
0.05
Preview Correction w/ Tire Compensation
Height (m)
Bump from Buffer
Chassis Response
2
2.5
3
3.5
4
4.5
5
5.5
6
6.5
7
−0.1
−0.05
0
0.05
0.1
z
r
(m)
Original
Modified
2
2.5
3
3.5
4
4.5
5
5.5
6
6.5
7
−10
−5
0
5
10
z
r
dot (m/s)
Time (sec)
Original
Modified
Figure 3.7: Plot of advanced HPR correction data and new preview data
3.3 Kalman Filter
The Kalman Filter (KF) design was done by SSCI. A 14 State, 7 DOF full car model was
used. Below is a list the available vehicle information generated by the KF (bold items
are KF states).
Suspension Expansion
, Suspension Velocity
Hub Velocity
Tire Deflection
Chassis Pitch & Roll rate,
Chassis HPR
Table 3.1: Kalman filter states and vehicle information
Adjusting noise covariances, setting system parameters and validating state information
for the KF was difficult. One subtlety was compensation for the velocity ratio of the
suspension arm. The arm created two coordinate frames, one for the chassis and one for
the wheels and road.
26
3.4 Performance Criterion
The US Army TARDEC has empirically developed a criterion known as “absorbed
power” to quantify ride comfort. This formulation filters the sprung mass acceleration
through a Human Response Filter (HRF) that represents the frequency range most
undesirable by a human driver. A second order approximation of the HRF is given in
equation (3.2), the units of input acceleration are
2
/ s
m
. Output from the filter is squared
and time averaged over a moving window to produce the “absorbed power” measure, also
known as the Cumulative Absorbed Power (CAP). Over a given terrain the CAP should
remain less than 6 Watts for driver comfort. Drivers inherently slow down when the
CAP persistently exceeds the 6 Watt limit.
)
3
.
901
02
.
30
(
12
)
(
F
R
H
2
+
+
=
s
s
s
s
)
(3.2)
27
Chapter 4 - High Level Controllers
Now that the building blocks are explained, the interesting parts of the project can be
readily described. The systems presentation is intended to be an overview of controller
design, references are provided for the interested reader.
4.1 Mock Passive Suspension
It is difficult to make the actuators naturally behave like a passive suspension. A best
effort approach is to open actuator bypass valves, shut off the hydraulic pump, and set the
primary valve control input to zero. A better method is to use the force mapping
provided by TARDEC for a normal HMMWV suspension. For a given suspension
velocity, the corresponding force is tracked by the FTC – according to Figure 4.1.
Figure 4.1: Plot of damping force vs. suspension velocity for a standard HMMWV
28
4.2 Sky Hook Damping Controller
There are two approaches to sky hook damping:
1. Theoretically add a damper to each wheel
2. Theoretically add three dampers to the chassis, one respectively for HPR
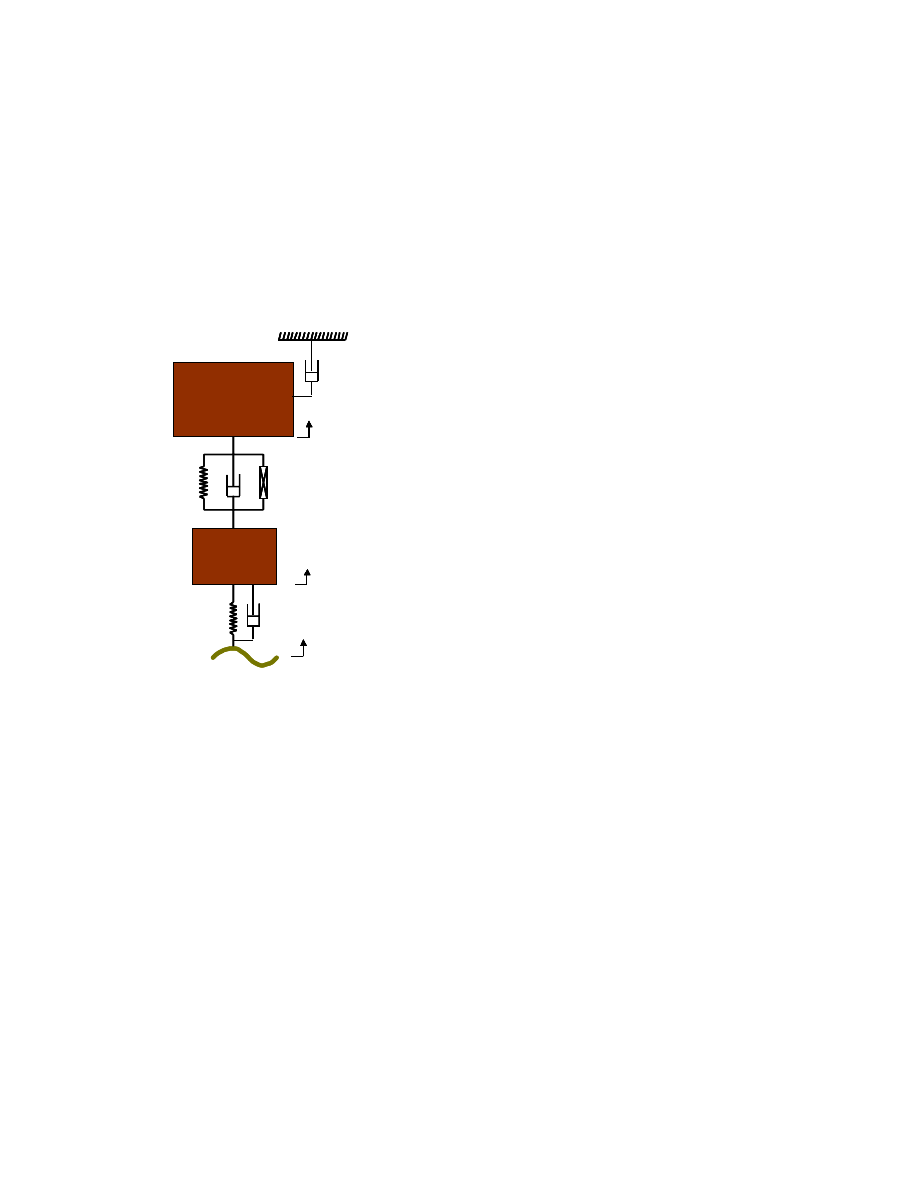
On the HMMWV, the simpler, 4 independent damper method is implemented. The plant
dynamics are derived as follows.
s
s
f
a
s
u
s
s
u
s
ms
x
m
F
F
x
x
k
x
x
c
F
&&
&
&
=
−
+
−
+
−
=
∑
)
(
)
(
Sprung
Mass
Unsprung
Mass
kt
bt
ks bs
F
B
sky
s
s
x
x &,
u
u
x
x &,
r
r &,
Sprung
Mass
Sprung
Mass
Unsprung
Mass
Unsprung
Mass
kt
bt
kt
bt
ks bs
F
ks bs
F
B
sky
B
sky
s
s
x
x &,
u
u
x
x &,
r
r &,
s
s
x
x &,
s
s
x
x &,
u
u
x
x &,
u
u
x
x &,
r
r &,r
r &,
u
u
f
a
u
s
s
u
s
s
u
t
u
t
mu
x
m
F
F
x
x
c
x
x
k
x
r
k
x
r
c
F
&&
&
&
&
&
=
+
−
−
+
−
+
−
+
−
=
∑
)
(
)
(
)
(
)
(
Figure 4.2: Diagram for sky hook damping and standard quarter car equations
The control law is
)
(
s
u
vel
s
sky
des
x
x
K
x
B
F
&
&
&
−
+
−
=
(4.1)
Controller gains are chosen to adjust the pole locations of the original system. For the
HMMWV the gain set {B
sky
, K
vel
} = {2000, 1000} is used.
4.3 Linear Quadratic Regulator
A standard LQR formulation for suspension systems is implemented. The plant
dynamics are of the form used by the Kalman filter. Thus, the cost function includes
29
{Chassis Accel, Susp Travel, Tire Deflection, Pitch & Roll rates, Hub Vel,
Control Usage}
(4.2)
Some transformations are required to put the associated cost function into standard form
and obtain the Riccati equation. The interested reader should consult Thompson et al [19]
for more details.
The LQR weighting set is given in Table 4.1. Very little restriction is placed on the
control input; chassis acceleration, pitch and roll rates have the highest costs. Matlab is
used to generate the LQR optimal matrix gain K.
Parameter
Weight
Chassis Acceleration
10
Pitch & Roll Rate
10
Suspension Travel
1
Hub Velocity
1
Tire Deflection
0.1
Control Usage
5
5
−
e
Table 4.1:
LQR weighting gains
In practice, the output F
des
of the Linear Quadratic Regulator is scaled by 500.
Theoretically, the “control usage” weight could be modified, however the scalar gain is
sufficient.
4.4 Model Predictive Controllers
The MPC was designed and coded for the HMMWV environment by SSCI, source code
and libraries are implemented in Simulink via S-function. MPC is the primary
computation for the 300MHz Alpha processor, at a ∆t of 30ms.
At each sampling instant, the MPC computes a finite number of future control moves
such that a cost function, over a finite horizon, is minimized. The first control output is
fed to the FTC. The exact workings of the MPC involve output prediction (based on a
30
system model) and a receding-horizon approach. For more information on MPC and
MPC
p
formulations consult Gopalasamy et al [9]. Therein, they describe how to recast
the MPC problem to a constrained Quadratic Programming (QP) problem and select the
respective real-time algorithm.
Of interest to this project are the weighting parameters of the cost function. Originally,
the cost criterion was based on the following terms:
{Absorbed Power, Susp Travel, Tire Deflection, Control Usage}
(4.3)
Field testing of the MPC and SKY controllers motivated the addition of an “optimal” sky
hook damping term into the MPC cost function. The ultimate set is
{Absorbed Power, Susp Travel, Tire Deflection, Control Usage, Susp Velocity} (4.4)
The physical constraint set, and respective values are shown below.
{Force, Force Rate, Susp Limit}
(4.5)
With preview information, MPC becomes MPC
p
. MPC
p
enhances MPC by considering
road
Z&
and relative road heights for the desired pH at each wheel.
Parameter
Weight
Absorbed Power
23
Suspension Travel
0.02
Suspension Velocity
192
Tire Deflection
0.08
Control Usage
1.1
6
−
e
Table 4.2:
MPC weighting gains
Constraint
Value
Force
± 8000 N
Force Rate
± 5000 N/s
Suspension Travel
± 0.1 m
Table 4.3:
MPC constraint values
31
Chapter 5 - Experimental Results
HMMWV controllers were introduced systematically, simple controllers were tested first
and computational complexity was slowly increased. Initially, PI position control of the
actuators was used to verify proper hardware wiring and functionality. Force tracking
control was tuned by analyzing the spool voltage surface then later connecting the force
surface to the spool voltage surface. To test the controllers, a desired profile was
required. For this, a custom, relative time, generic profile generator block was created.
Following satisfactory tuning of the FTC, the high-level, force generating controllers
were connected to the desired force of the FTC.
Generated preview information was used with the MPC
p
. Owing to difficulties with the
preview correction algorithm the MPC had not used sensor, preview data at the time of
this report.
5.1 Ride Height Control
Ride Height Control (RHC) is the most basic, yet essential controller on the HMMWV.
RHC performance is shown in Figure 5.1. The desired position being tracked is part of a
demonstration profile. At the end of a real-time modifiable sequence of events one tire is
raised off of the ground; this demonstrates some extraneous advantages of active
suspension systems.
A slight phase lag is visible in Figure 5.1. The lag can be removed with higher gains but
remains for the sake of passenger comfort.
32
15
20
25
30
−0.04
−0.02
0
0.02
0.04
RHC Performance − LHF
Position (m)
Actual
Desired
15
20
25
30
−0.04
−0.02
0
0.02
0.04
RHC Performance − LHR
Position (m)
Time (sec)
Actual
Desired
15
20
25
30
−0.04
−0.02
0
0.02
0.04
RHC Performance − RHF
Actual
Desired
15
20
25
30
−0.04
−0.02
0
0.02
0.04
RHC Performance − RHR
Time (sec)
Actual
Desired
Figure 5.1: Plot of Ride Height Controller performance
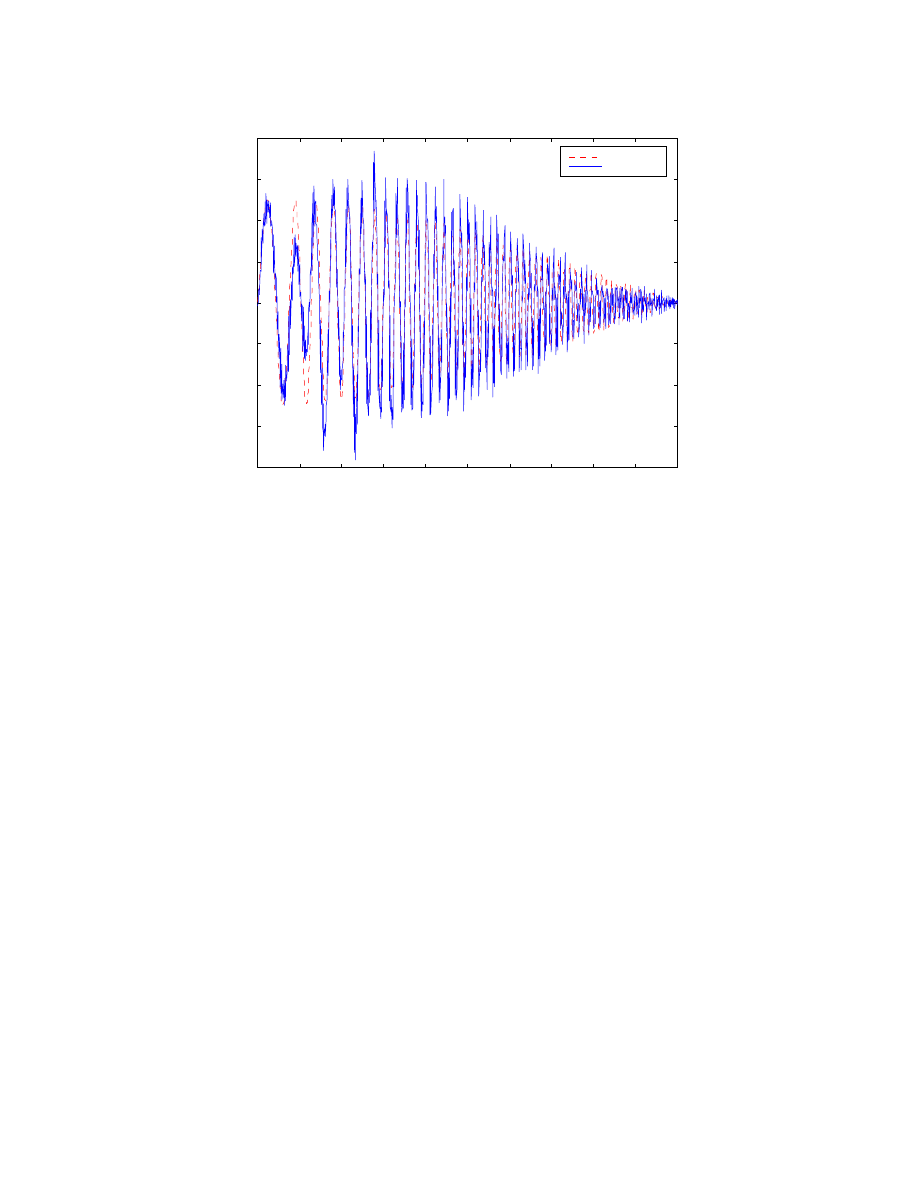
5.2 Force Tracking Control
This section depicts most of the problems mentioned in Chapter 2. The final Force
Tracking Controller (FTC) is more than sufficient for the research objectives. The most
common profile used in tuning the controller is a “sweep sine”. A “sweep sine” varies
frequency linearly from 1Hz to 10Hz and attenuates the amplitude with time. Thus, the
time axis roughly corresponds to a frequency.
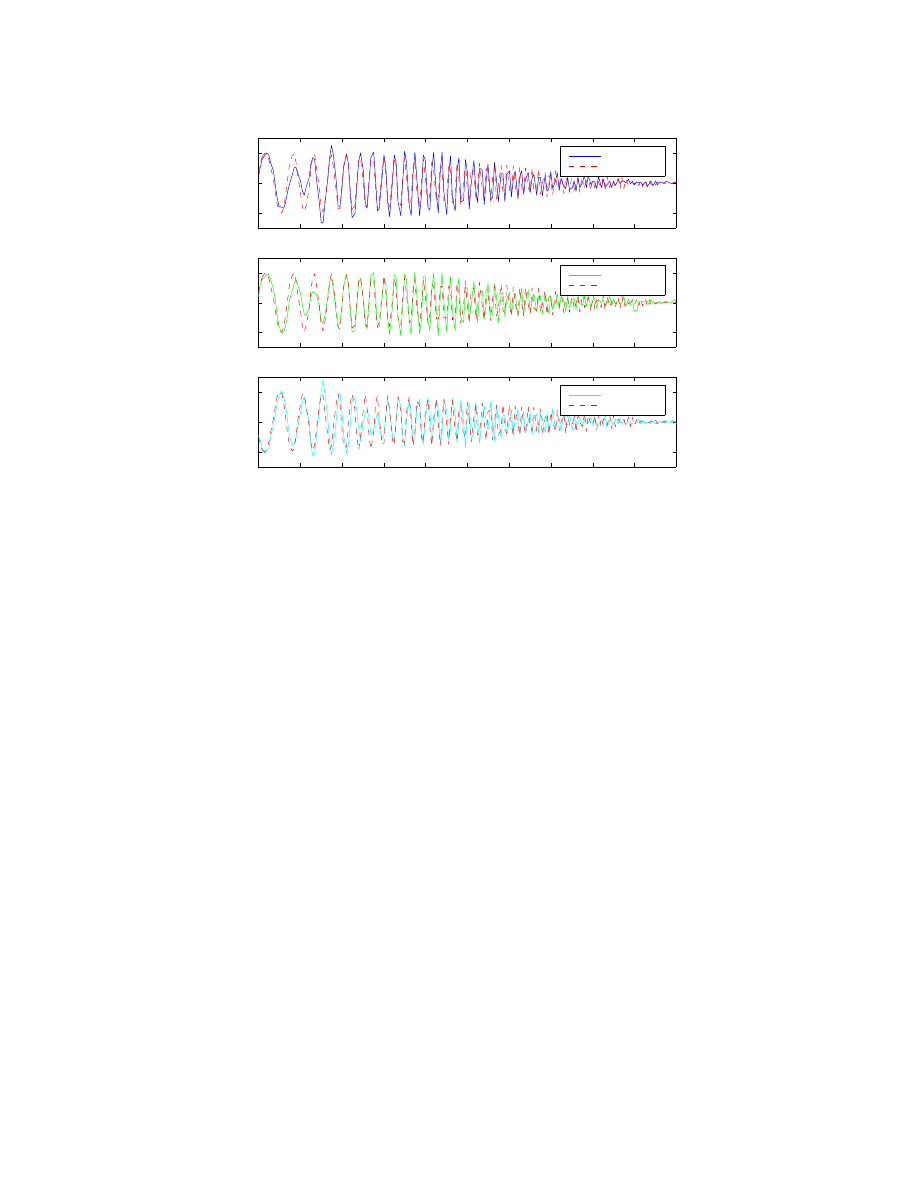
Figure 5.2 shows the affects of the resonant modes of the full car system. To obtain these
plots, FTC gains are turned down slightly to amplify the problem.
33
0
1
2
3
4
5
6
7
8
9
10
−1000
0
1000
FTC HPR Performance − Force (N)
Heave
Actual
Desired
0
1
2
3
4
5
6
7
8
9
10
−1000
0
1000
Pitch
Actual
Desired
0
1
2
3
4
5
6
7
8
9
10
−1000
0
1000
Roll
Time (sec)
Actual
Desired
Figure 5.2: Plot of FTC performance in heave, pitch & roll modes
Observe the resonant peaks of ~ 2Hz for heave and pitch modes; the roll mode is closer
to 4 Hz.
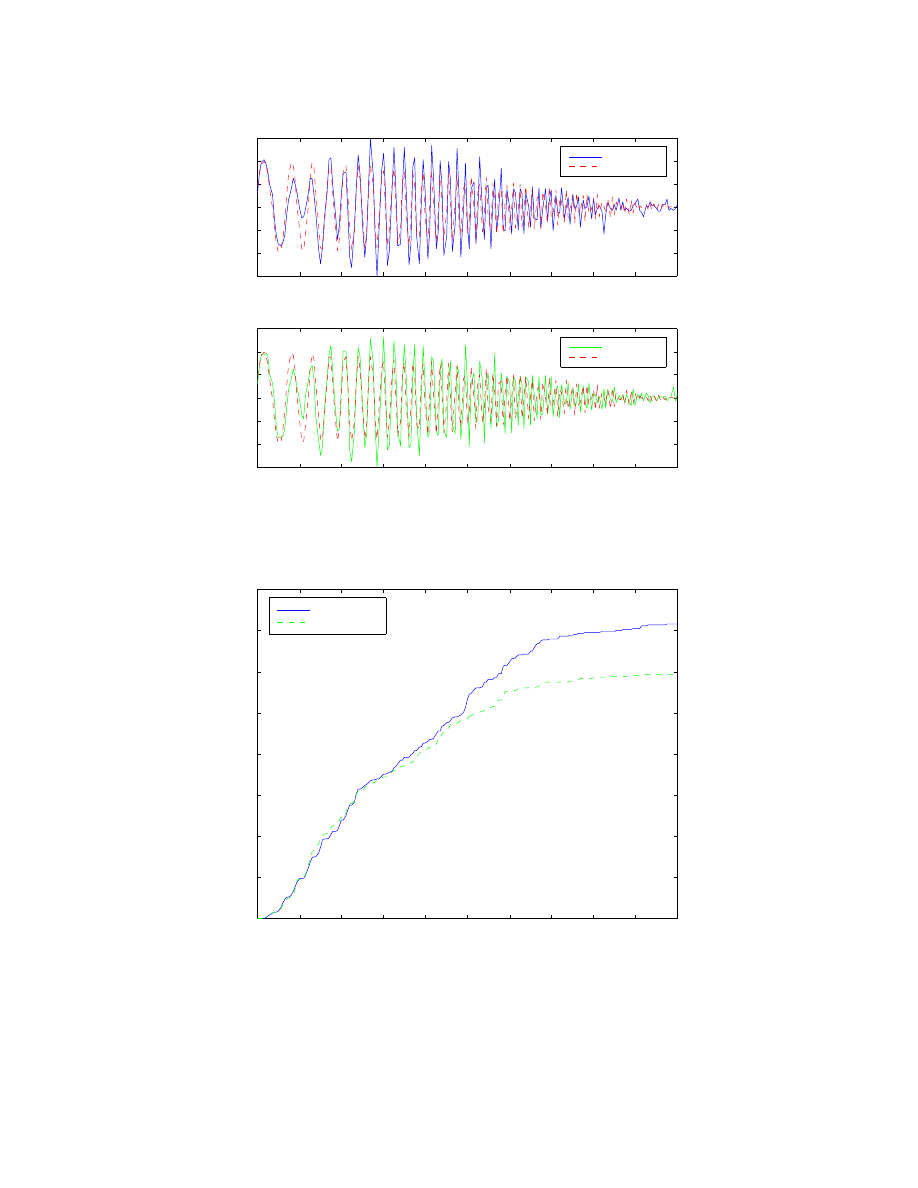
Next are the results of the Output Redefinition scheme. Once again, controller gains are
turned down slightly. There is a slight improvement in tracking around 1.5Hz, or about
1sec, as shown in Figure 5.3. Moreover, Figure 5.4 depicts a mild improvement in the
sum squared relative velocity error for frequencies greater than 5Hz. Relative velocity
error is defined as the difference between the actual suspension velocity
u
s
x
x
&
&
−
and the
velocity predicted by the quarter car model. These results are not an indication that the
theory is erroneous, but rather, the ORD gain cannot be increased very high because
control noise amplification causes system instability. Osorio et al [14] explains that a
gain of 5000 was needed to sufficiently move the poles of the Berkeley Active
Suspension Rig (BASR) system. With the HMMWV FTC and KF only a gain of 150 is
attainable. In implementation, ORD is not used as it requires information from the KF,
which if difficult to obtain given the HMMWV DSP architecture, see Appendices B & C.
34
0
1
2
3
4
5
6
7
8
9
10
−1500
−1000
−500
0
500
1000
1500
Force Tracking Controller Performance
Force (N)
Actual
Desired
0
1
2
3
4
5
6
7
8
9
10
−1500
−1000
−500
0
500
1000
1500
FTC with Output Redefinition
Force (N)
Time (sec)
Actual
Desired
Figure 5.3: Plot of FTC performance with Output Redefinition
0
1
2
3
4
5
6
7
8
9
10
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Relative Velocity Error Improvement using ORD
Sum Squared Error (m
2
/s
2
)
Time (sec)
Kv = 0
Kv = 150
Figure 5.4: Plot of sum squared relative velocity error for output redefinition
35
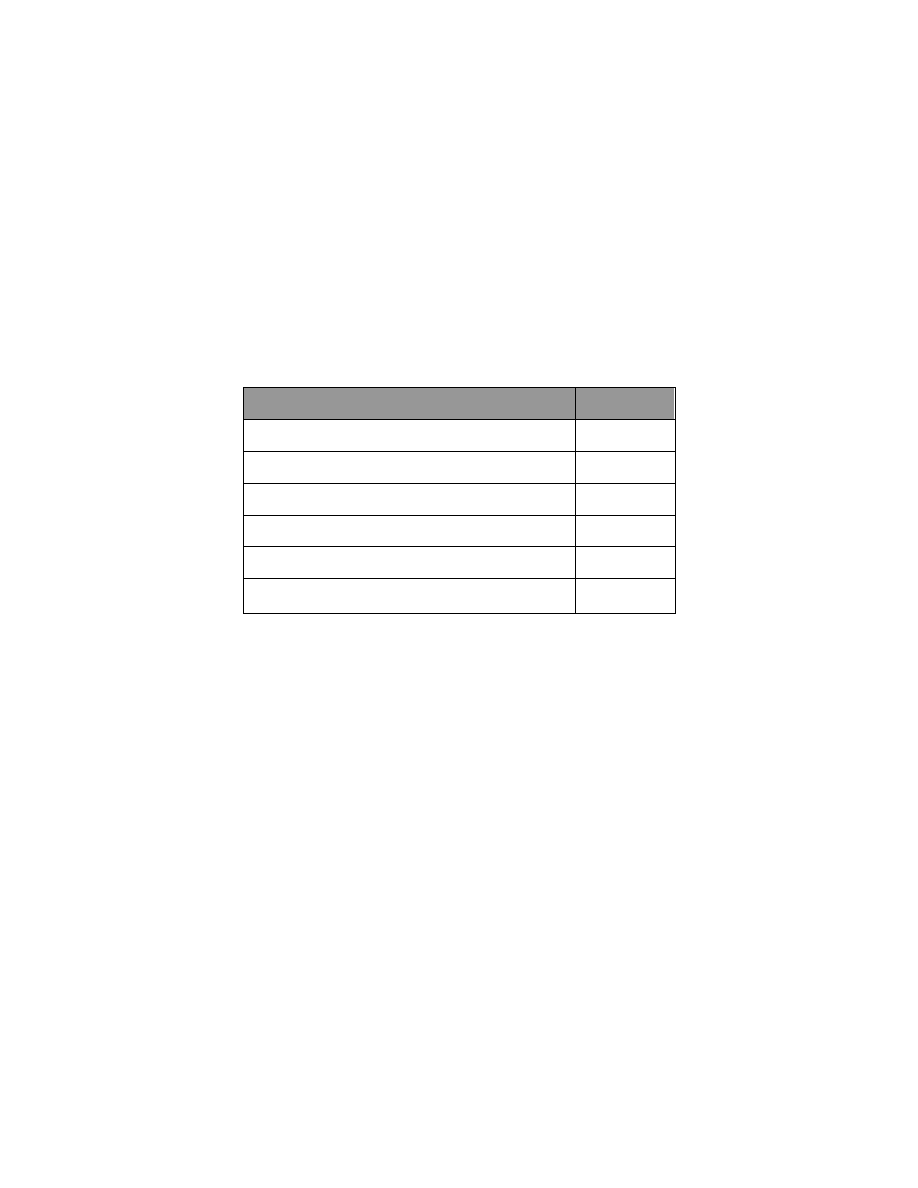
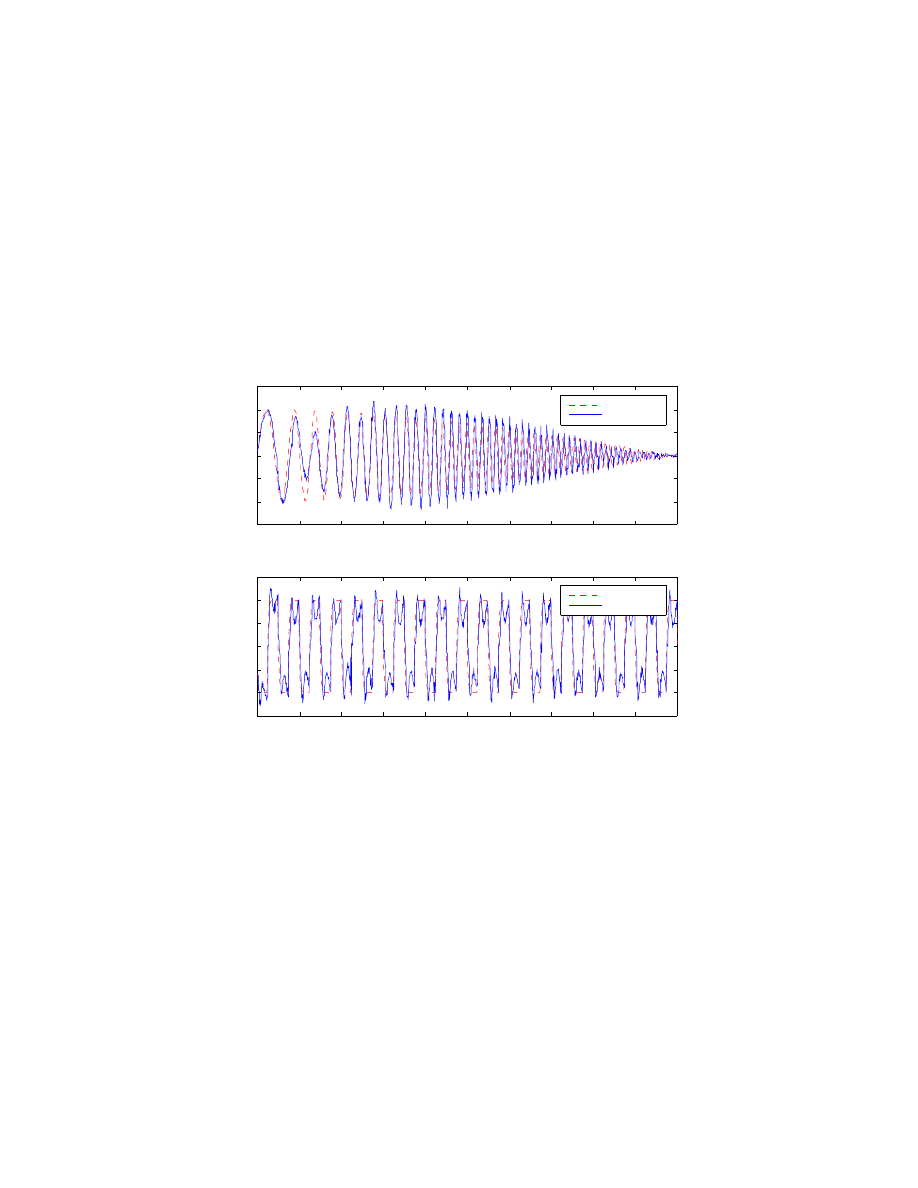
In Figure 5.5 the controller gains are returned to their nominal values and the initial
amplitude of the “sweep sine” was increased to 2000 N. Additionally, the response to a
filtered square wave is shown. There is no compensation for HPR or ORD. If present,
ORD would lessen the dip at each peak.
Figure 5.6 shows FTC performance while tracking a discrete F
des
. Since the higher level
controllers run at a sampling rate of 30ms the original F
des
is filtered, equation (2.24), and
a smoother F
des
is tracked by the FTC.
0
1
2
3
4
5
6
7
8
9
10
−3000
−2000
−1000
0
1000
2000
3000
Force Tracking Control − Sweep Sine
Force (N)
Desired
Actual
0
1
2
3
4
5
6
7
8
9
10
−1500
−1000
−500
0
500
1000
1500
Force Tracking Control − Square Wave
Force (N)
Time (sec)
Desired
Actual
Figure 5.5: Plot of n
ominal FTC performance
36
0
1
2
3
4
5
6
7
8
9
10
−4000
−3000
−2000
−1000
0
1000
2000
3000
4000
Force Tracking Control − Discrete Sweep Sine
Time (sec)
Force (N)
Desired
Actual
Figure 5.6: Plot of FTC performance tracking a discrete, generated control signal F
des
5.3 High-Level Controllers
Tuning and performance evaluation of the high-level controllers is conducted at the test
track described in Appendix D. More realistic performance data is collected on an off-
road, natural terrain.
Figure 5.7 depicts typical results. All of the higher level controllers perform similarly,
the MPC is slightly better than the rest. There is better than a twofold improvement in
the absorbed power criterion when compared to the passive suspension. LQR
performance, not shown, is comparable to the MPC performance. This is true provided
the system remains within constraints, Table 4.3, and there is no preview information.
For the MPC trial in Figure 5.7 the force tracking controller performance is shown.
Observe the two spikes corresponding to collision with the test track obstacles. At these
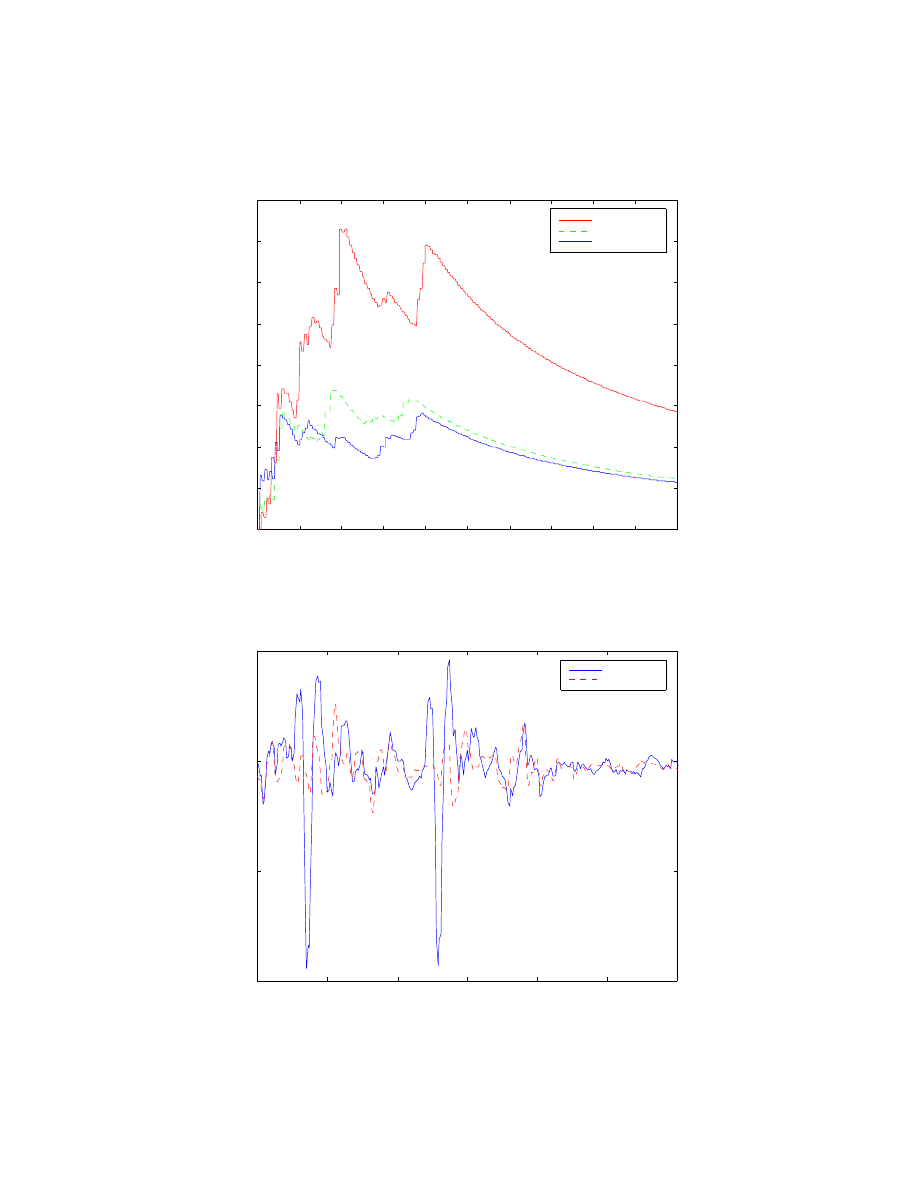
37
instances there is saturation of the control input u
1
. In theory, the MPC
p
should reduce
the amount of saturation.
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
0
5
10
15
20
25
30
35
40
High Level Controller Results − Test Track
Relative Absorbed Power (Watts)
Time (sec)
Passive
Sky Hook
MPC
Figure 5.7: Plot of higher level controller performance evaluated at the test track
0
0.5
1
1.5
2
2.5
3
−10000
−5000
0
5000
FTC Performance, for MPC F
des
− RHF
Force (N)
Time(sec)
Actual
Desired
Figure 5.8: Plot of FTC performance tracking the MPC F
des
of Figure 5.7
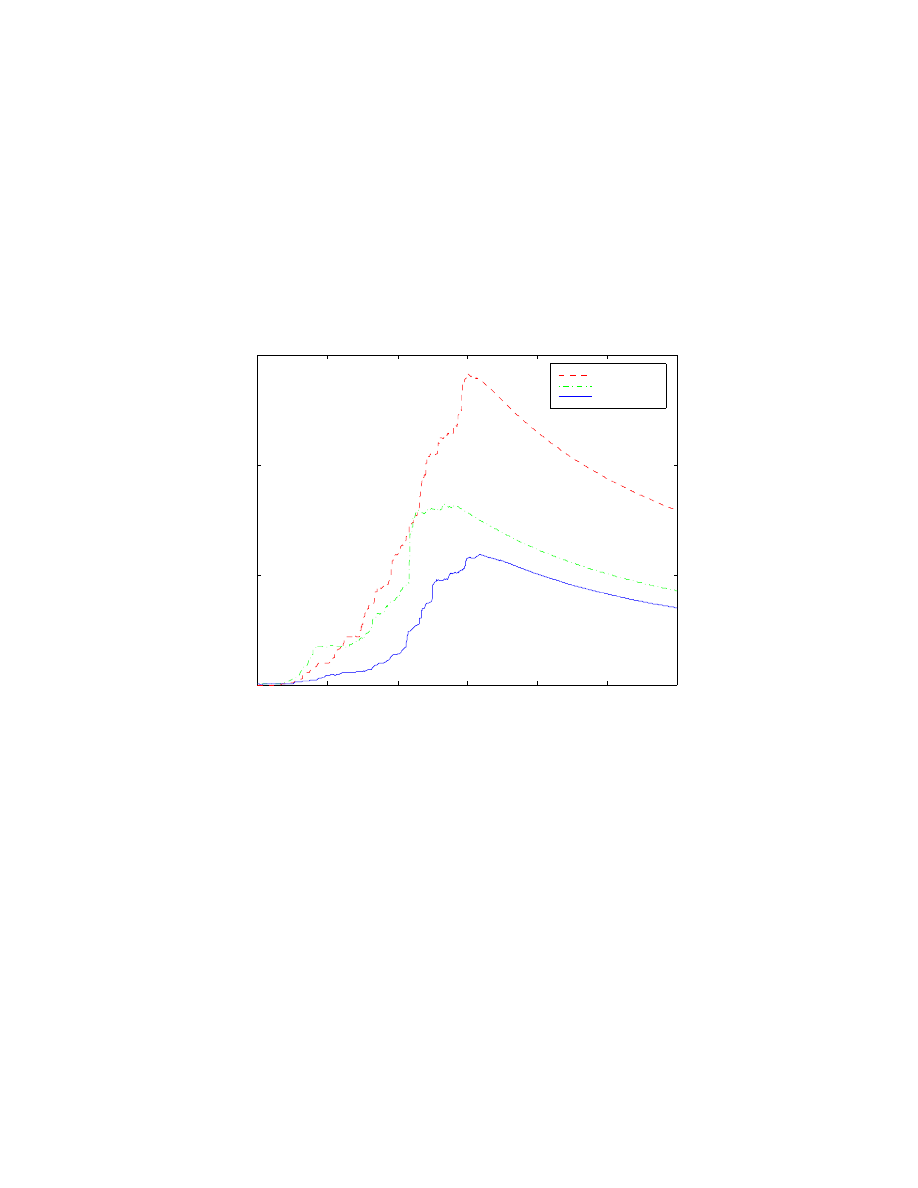
38
Using the same controllers off-road, the results of Figure 5.9 are generated. Now, MPC
handedly beats the Sky Hook Damping controller. Moreover, the off-road results show
that only the MPC maintained a CAP of < 6 Watts. By military standards, this terrain is
only drivable at this speed, 20mph, if the MPC is used.
To better understand the improvements of Figure 5.9 the suspension LVDT
measurements are shown in Figure 5.10. The MPC reduced suspension travel and the
likelihood of suspension saturation, which occurs at approximately ± 0.06 meters.
0
5
10
15
20
25
30
0
5
10
15
High Level Controller Results − Off Road
Cumulative Absorbed Power (Watts)
Time (sec)
Passive
Sky Hook
MPC
Figure 5.9: Plot of higher level controller performance evaluated off-road
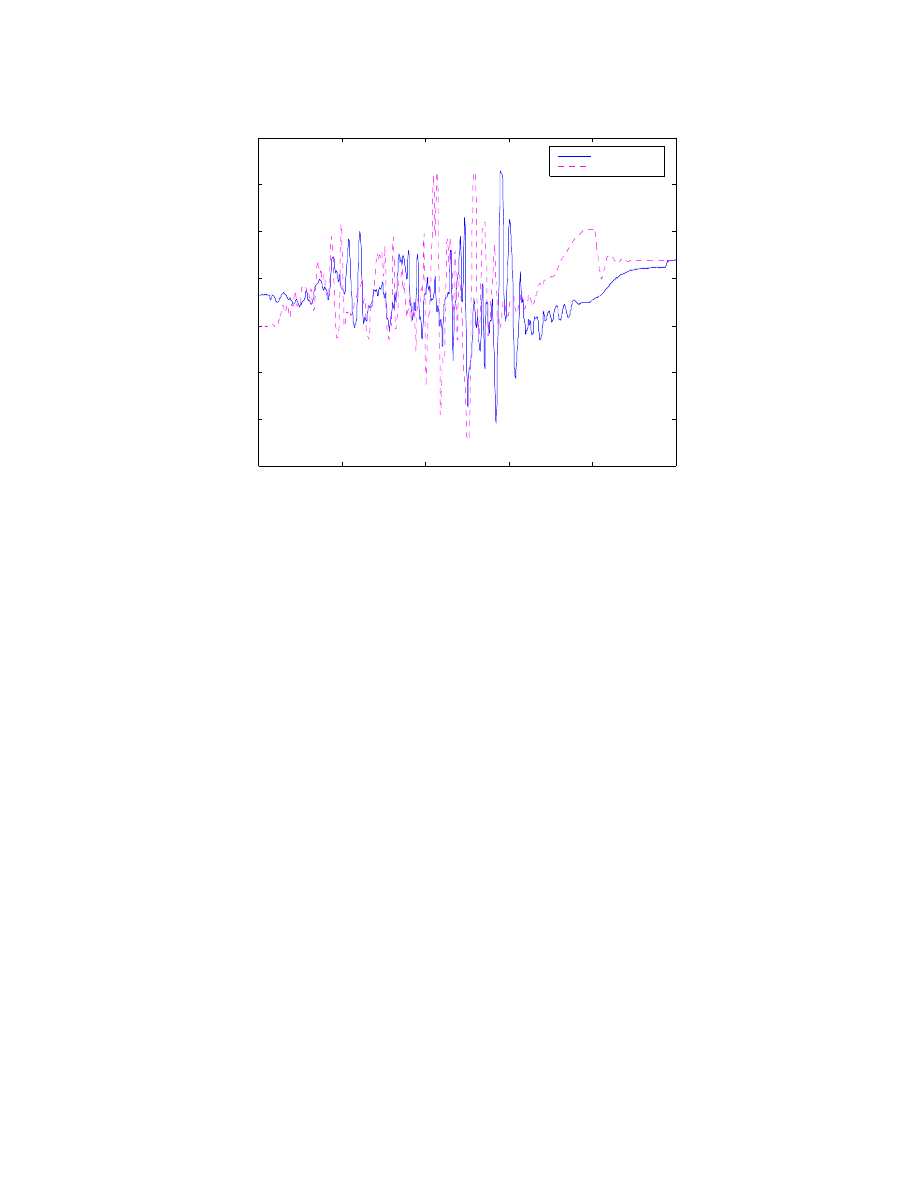
39
0
5
10
15
20
25
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
LHF Pos (m)
Time (sec)
Suspension Travel for Off−road Test
MPC
Sky Hook
Figure 5.10: Plot of suspension travel for off-road data in Figure 5.9
5.4 MPC Preview Controller
Finally, the preview information is added. Currently, only access to the generated
preview is available. Figure 5.11 implies that with preview, MPC performance
deteriorates. Intuitively this does not make sense. Some possible causes for this are
1. Poor synchronization between digital bumps and real bumps
2. Compounded distance error over the long track, see Figure 3.1
3. Bump profile was to perfect, it has a high initial derivative
Looking into these causes and improving the results is left for future work on the project.
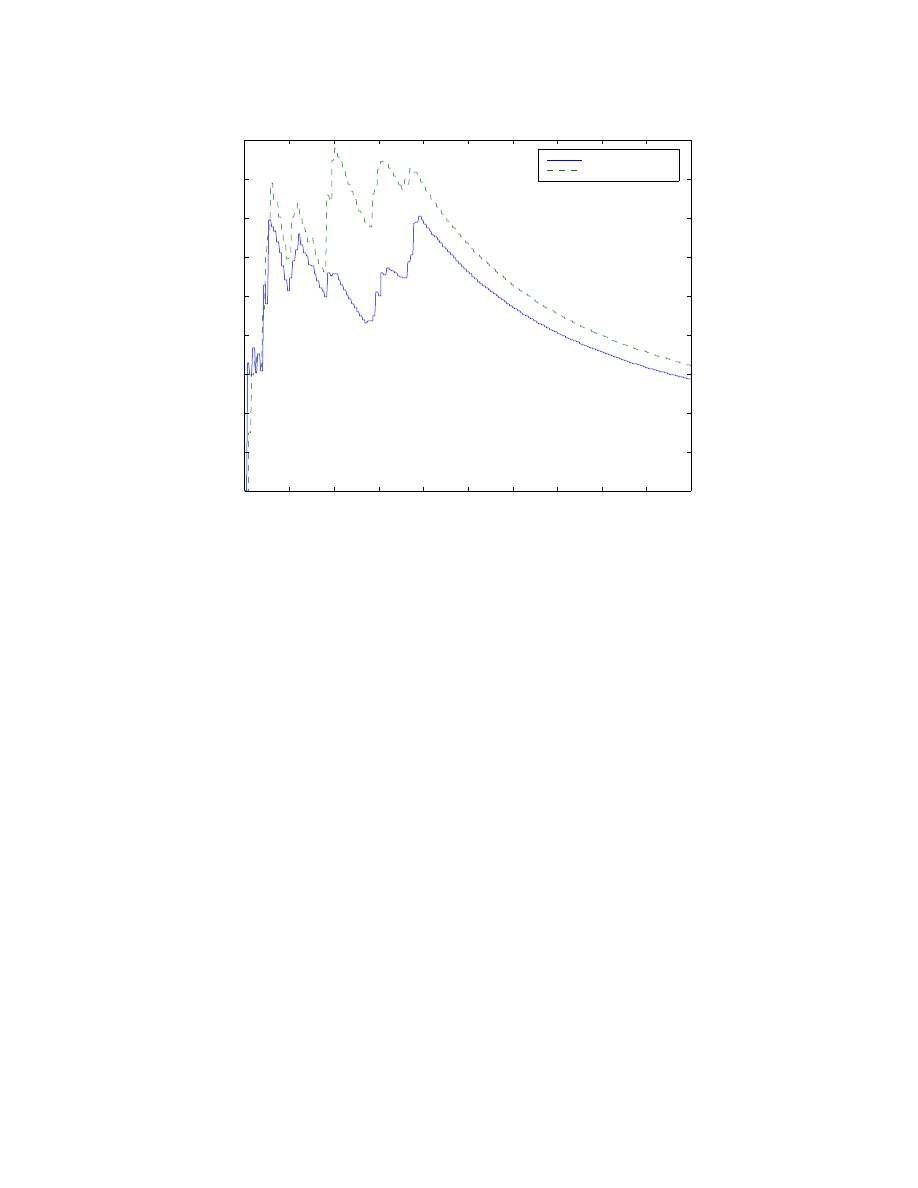
40
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
0
2
4
6
8
10
12
14
16
18
Model Predictive Controller Results − Test Track
Cumulative Absorbed Power (Watts)
Time (sec)
MPC
MPC Preview
Figure 5.11: Plot of MPC performance with and without generated preview data
41
Chapter 6 - Conclusions
Practical, implementation oriented, modifications to dynamic surface control theory were
successfully employed. Modifications involved adding filters at various levels of the
control computation. To the end of realizing full functionality of Model Predictive
Control (MPC) using preview information, numerous subsystems were designed. All
subsystems work well. A Sky Hook Damping Controller (SKY) and a Linear Quadratic
Regulator (LQR) were developed to benchmark the performance of the MPC without
preview. For the non-preview controllers more than a twofold increase in ride comfort
over passive suspension was obtained. This resulted in an increased drivable speed for
rough terrain. In particular, the MPC allowed for the fastest speed over off-road terrain.
All of the infrastructure is in place to test and debug the MPC with preview. Initial
results indicate the need for further research. In specific, more work is needed on the
preview correction algorithm and on the MPC
p
weights and constraints tuning. In the
immediate future testing will continue on the test track. Perhaps an FSLQ with preview
will be implemented; the respective derivation has already been done as part of Phase I
work.
The following support tasks need also be accomplished:
1. Design a test where suspension consistently saturates
2. Compute RMS for test track and compare results to the plot in Appendix D
3. Redesign CAP computation to be based on a moving window of appropriate
size
42
References
[1]
Alleyne, A., “Nonlinear and Adaptive Control with Applications to Active
Suspensions”, Ph.D. Dissertation, University of California at Berkeley, Berkeley,
CA, 1994.
[2]
Alleyne, A., and Hedrick, J.K., “Nonlinear Adaptive Control of Active
Suspensions”, IEEE Transactions on Control Systems Technology, Vol. 3, No. 1,
pp. 94-102, 1995.
[3]
Alleyne, A., and Hedrick, J.K., “Nonlinear Control of a Quarter Car Active
Suspension”, Proceedings of the 1992 American Control Conference, Chicago,
IL, 1992.
[4]
Alleyne, A., and Liu, R., “On the Limitations of Force Tracking Control for
Hydraulic Servosystems”, ASME Journal of Dynamic Systems, Measurement and
Control, 1999.
[5]
Anderson, B., and Moore, J.B., “Optimal Control – Linear Quadratic Methods”,
Prentice Hall, 1990.
[6]
Bender, E.K., “Optimum Linear Preview Control with Application to Vehicle
Suspension”, Trans. Of ASME, J. of Basic Engineering, pp.213-221, Jun.1968.
[7]
Engleman, G.H. and Rizzoni, G., “Including the Force Generation Process in
Active Suspension Control Formulation”, Proceedings of the 1993 American
Controls Conference, San Francisco, CA, pp. 701-705, 1993.
[8]
Gopalasamy, S., and Hedrick, J.K., “Tracking Nonlinear Non-minimum Phase
Systems Using Sliding Control”, International Journal of Control,
Vol
. 57, No. 5,
pp. 1141-1158, 1994.
[9]
Gopalasamy, S., Hedrick, J.K., Osorio C., and Rajamani, R., “Model Predictive
Control For Active Suspensions – Controller Design and Experimental Study”,
Trans. of ASME, J. of Dynamic Systems and Control,
Vol
. 61, pp. 725-733, 1997.
[10] Hac, A., “Optimal Linear Preview Control of Active Vehicle Suspension”,
Vehicle System Dynamics, Vol. 21, pp. 167-195, 1992
[11] Hac, A., “Suspension Optimization of a 2-DOF Vehicle Model Using Stochastic
Optimal Control Technique”, Journal of Sound and Vibration, Vol. 100, No.3,
pp.343-357, 1985.
[12] Hrovat, D., “Survey of Advanced Suspension Developments and Related Optimal
Control Applications”, Automatica, Vol.33, No.10, pp 1781-1817

43
[13] Langlois, R.G., and Anderson, R.J., “Preview Control Algorithms for the Active
Suspension of an Off-Road Vehicle”, Vehicle System Dynamics, Vol. 24, pp.65-
97, 1995.
[14] Osorio, C., Gopalasamy, S., and Hedrick, J., “Force Tracking Control for Electro
hydraulic Active Suspensions Using Output Redefinition”, Proceedings of the
ASME Winter Annual Meeting, Nashville, TN, 1999.
[15] Rajamani, R., “Observers for Nonlinear Systems, with application to Automotive
Active Suspensions”, Ph.D. Dissertation, University of California at Berkeley,
Berkeley, CA, 1993.
[16] Sharp, R.S., and Hassan, S.A., “The Relative Performance Capabilities of Passive,
Active, and Semi-Active Car Suspension Systems”, Proceedings of the Institution
of Mechanical Engineers, Part D, Vol. 203, No.3, pp.219-228, 1986.
[17] Slotine, J.J., and Li, W.P., “Applied Nonlinear Control”, Prentice Hall, 1991.
[18] Thompson, A.G. and Chaplin, P.M., “Force Control in Electrohydraulic Active
Suspensions”, Vehicle System Dynamics, Vol. 25, pp.185-202, 1996.
[19] Thompson, A.G., Davis, B.R., and Pearce, C.E.M., “An Optimal Linear Active
Suspension with Finite Road Preview”, Society of Automotive Engineers paper
0148-7191/80/0225-0520(800520), 1980.
[20] Tomizuka, M., “Optimum Linear Preview Control with Application to Vehicle
Suspension – Revisited”, Trans. of ASME, J. of Dynamic Systems, Measurement
and Control, Vol.98, No.3, pp.309-315, Sep.1976.
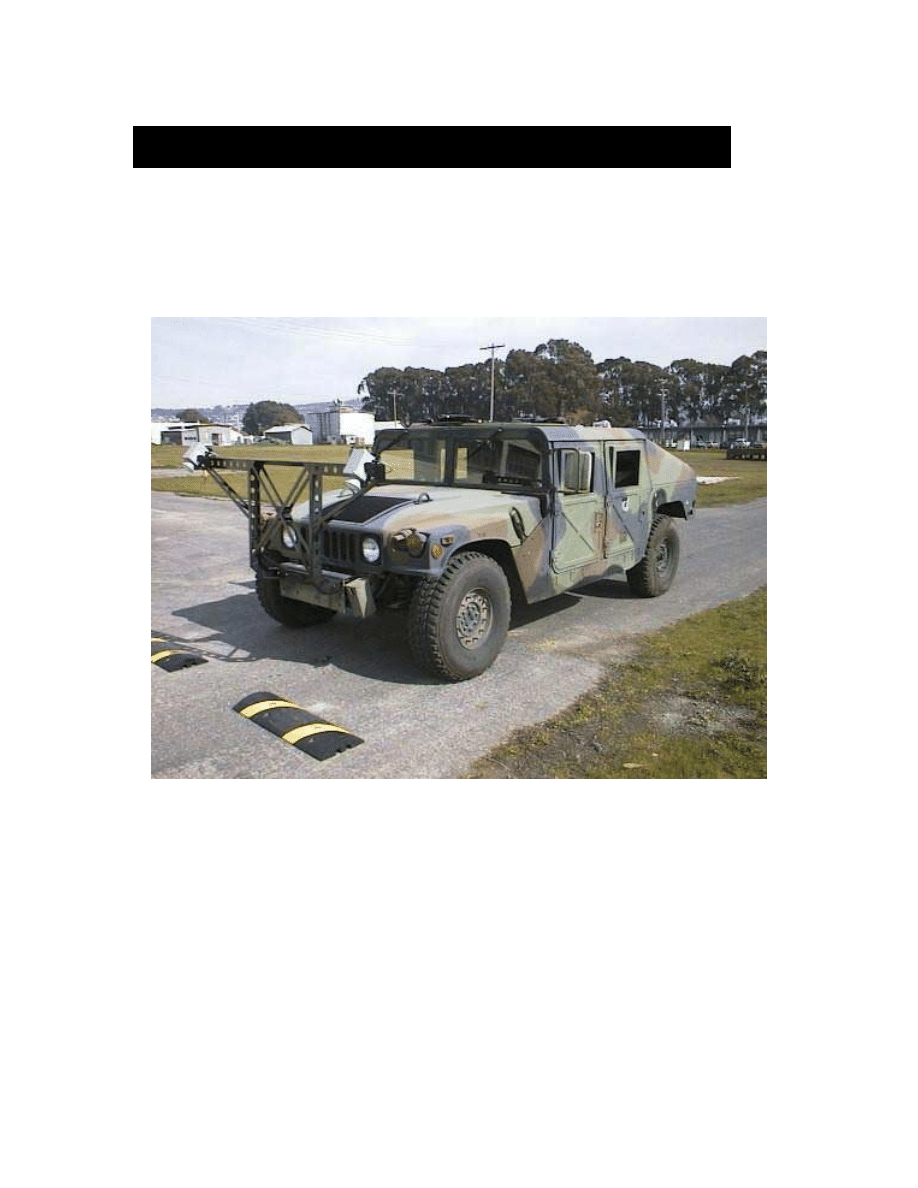
44
Appendix A - HMMWV Hardware
A.1 Equipment as Received
Vehicle
Figure A.1: Photograph of experimental HMMWV
The vehicle used for this project is an experimental High Mobility Multi-Purpose
Wheeled Vehicle (HMMWV) Model M1026, manufactured in 1993 by American Motors
General for the US Army TACOM. Powered by a 6.5 liter diesel V8 rated at 150 hp @
3600 RPM, the HMMWV has a top speed of 55 mph. The engine is mated to an
automatic transmission driving a full time four-wheel drive system.
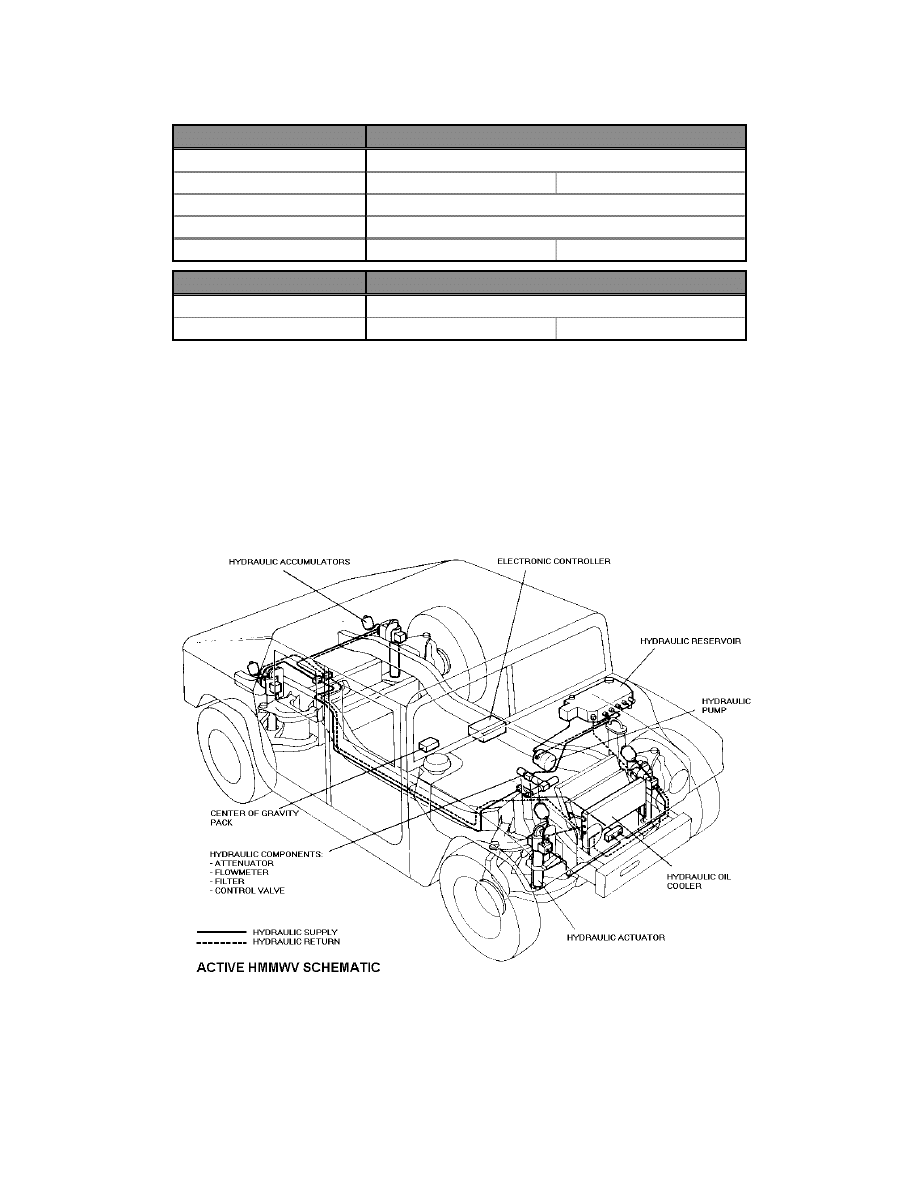
45
Dimensions
Front
Rear
Wheelbase
Distance from CG
1531.6mm
1770.4mm
CG Height
Track
Total Suspension Travel
269mm
271.5mm
Weights
Front
Rear
Gross Vehicle Weight
Unsprung Weight
126Kg
130Kg
3302mm
842.6mm
1818.6mm
3810Kg
Table A.1: Base Vehicle Data
Hydraulic System
Lotus Engineering of England modified the vehicle for the Army’s research purposes.
The conversion work was done in 1993, under a previous contract with Lotus for the
development and implementation of a velocity based active suspension controller.
Figure A.2: Physical schematic for the experimental HMMWV

46
As can be seen by the schematic in Figure A.2, the experimental HMMWV has been
equipped with four hydraulic actuators in place of the standard passive suspension shock
absorbers. The vertical wheel travel was nearly doubled to 26 centimeters.
A Vickers PV3-115 hydraulic pump powers the system hydraulics. The pump is rigidly
mounted to the chassis and is driven by a transmission belt directly connected to the
engine powertrain. The system supply pressure is 3000 psi. With a maximum design
flow of 45 liters per minute, the pump consumes up to 32 hp and requires an engine speed
of 700 to 3500 rpm. This information is summarized in Table 1.1.
Two independent current driven electro-hydraulic servovalves control hydraulic flow in
each of the four actuators. Moog, Inc., located in the United Kingdom, manufactured
these valves. The primary spool valve, model E773-030, controls the amount and
direction of flow to or from each of the two actuator chambers. The bypass valve, model
E760-730, controls the area of an orifice that allows flow between the two chambers of
the actuator. While the primary spool valve controls the actuator behavior by introducing
energy to the system, the bypass valve can only control the rate of energy dissipation
within the actuator. See actuator schematic, Figure 2.3.
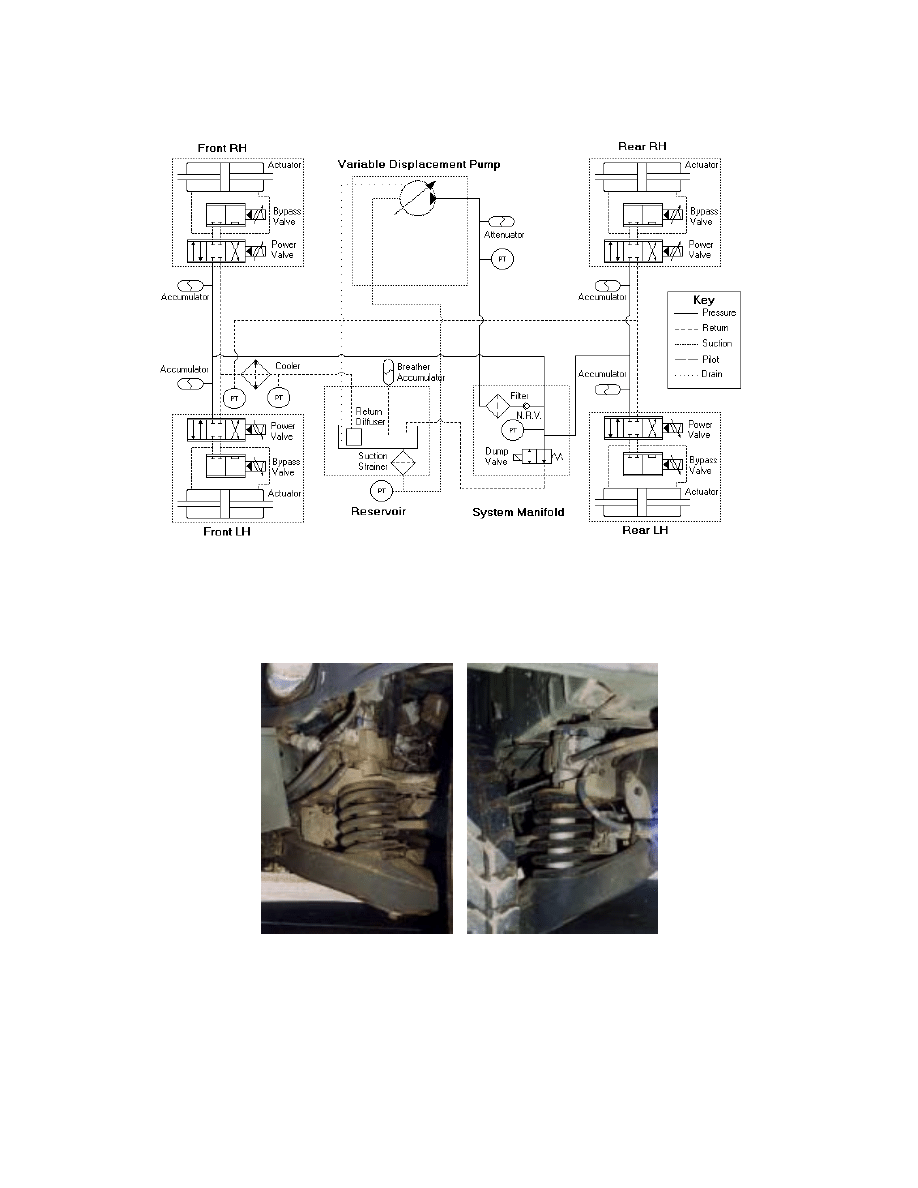
47
Figure A.3: Schematic for the HMMWV hydraulic system
Figure A.4: Photographs of hydraulic actuator installations: left- Front right- Rear
48
Sensors and Electronics
The Lotus-modified HMMWV is equipped with a suite of sensors and transducers to
measure various vehicle data. Table A.2 lists the Lotus-installed sensors and their
respective measurements.
Qty Sensor Type
Location
Measurement
4
Load Cell
Top mount of each actuator
Actuator forces
4
LVDT
Inside each actuator
Actuator displacement
4
Hub Accelerometer
On each wheel hub
Axle vertical acceleration
2
CG Accelerometer
CG pack
Longitudinal & lateral accel.
1
Yaw Rate Sensor
CG pack
Vehicle yaw rate
1
Rack Displacement
Steering box pinion shaft
Steering angle
1
Speedometer
Engine compartment
Vehicle speed
1
Tachometer
Engine compartment
Engine rpm
3
Pressure Transducer Pump outlet, filter inlet & outlet
Supply pressures
2
Pressure Transducer Cooler inlet & outlet
Return pressures
1
Pressure Transducer Reservoir Tank
Reservoir pressure
1
Hydraulic Flow
Meter
In-line after pump
Total hydraulic flow
3 Thermocouple
Reservoir, pump outlet, &
cooler inlet
System temperatures
Table A.2: Experimental HMMWV, Lotus installed sensors and transducers
Sensor and transducer signals are connected to the Lotus Interface and Signal
Conditioning Box, Figure A.5, located in the center console of the HMMWV. Most
measurements are passed through a set of differential gain amplifiers and low pass, anti-
aliasing filters with a cut off frequency around 250Hz. The Lotus Interface and Signal
Conditioning Box receives power directly from the car battery, 24 VDC, and provides
regulated power (
±
15, +12 or +5 VDC) to all connected sensors.
49
Figure A.5: Photograph of Lotus interface and signal conditioning box
A.2 Sensors added by UCB
As received, the sensing and control capabilities of the HMMWV were insufficient to
obtain our control objectives. The following subsections detail UCB modifications.
A.2.1 Servo
Amplifiers
The output power of the digital to analog converter (DAC) was insufficient to control the
primary and spool valves directly. Eight servo-amplifiers were purchased and are used in
a proportional-derivative (PD) current feedback loop to position the respective spools.
These boards allow control of the spool via a voltage signal from the AutoBox as well as
provide for a voltage feedback term proportional to the physical position of the spool.
Below is the specification sheet for the amplifiers. Capacitor C1 was removed to
eliminate the integral component of the controller. Resistor R7 was changed to adjust the
proportional gain of the current feedback servo amplifier controller.
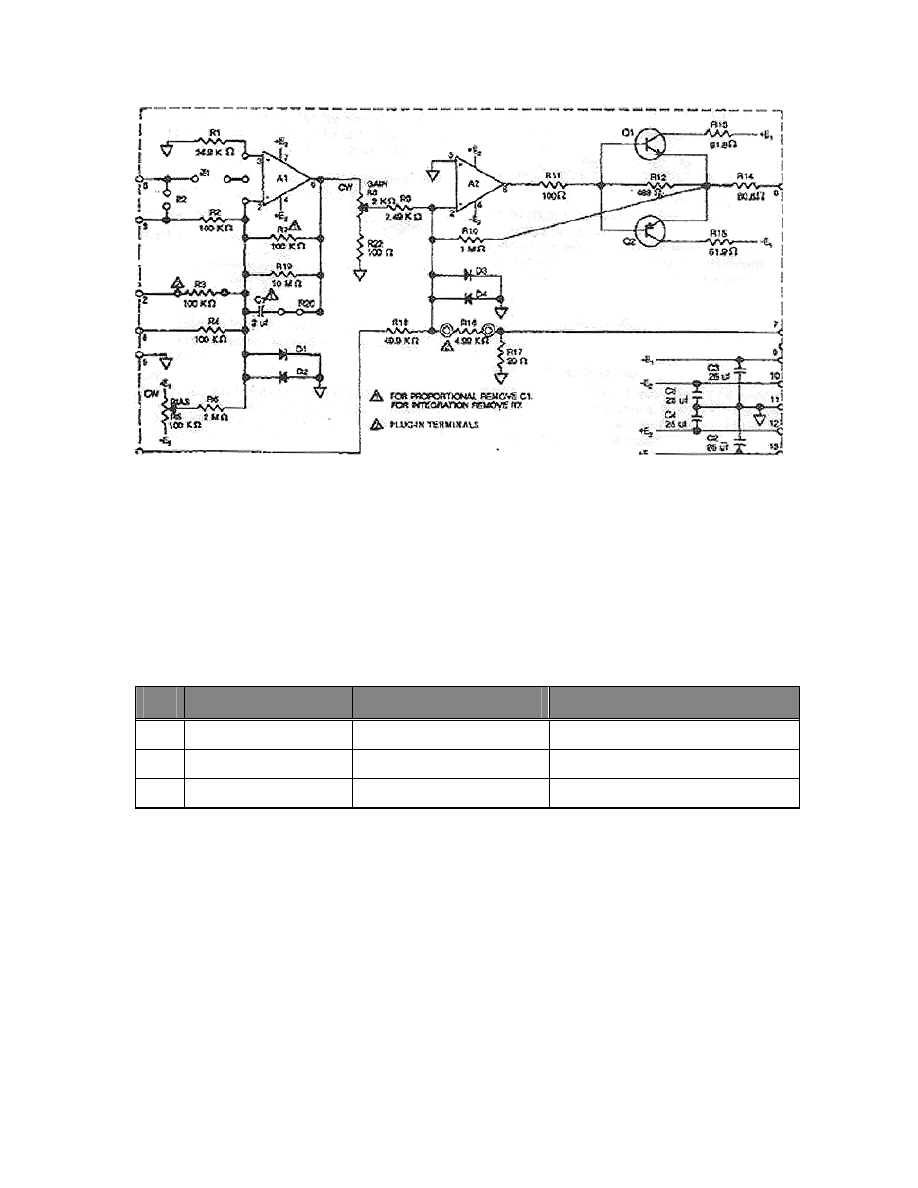
50
Figure A.6: Schematic for the servo-amplifier circuit board
A.2.2
Accelerometers & Gyros
In addition to the vehicle sensors installed by Lotus, eight new sensors were installed.
Four sensors to measure additional states and four to replace faulty sensors, see Table
A.3. All sensors were manufactured by CFX, Edgemont PA. A specification sheet for
each type of sensor is provided in Figure A.7.
Qty Sensor Type
Measurement
Mount Locations
2
Accelerometer
Z-axis acceleration
Opposite corners of the chassis
2
Rate Gyro
Pitch and Roll rates
Center console
4
Accelerometer
Hub Accelerations
Inner hub (replaced old sensors)
Table A.3: Additional vehicle sensors installed by UCB
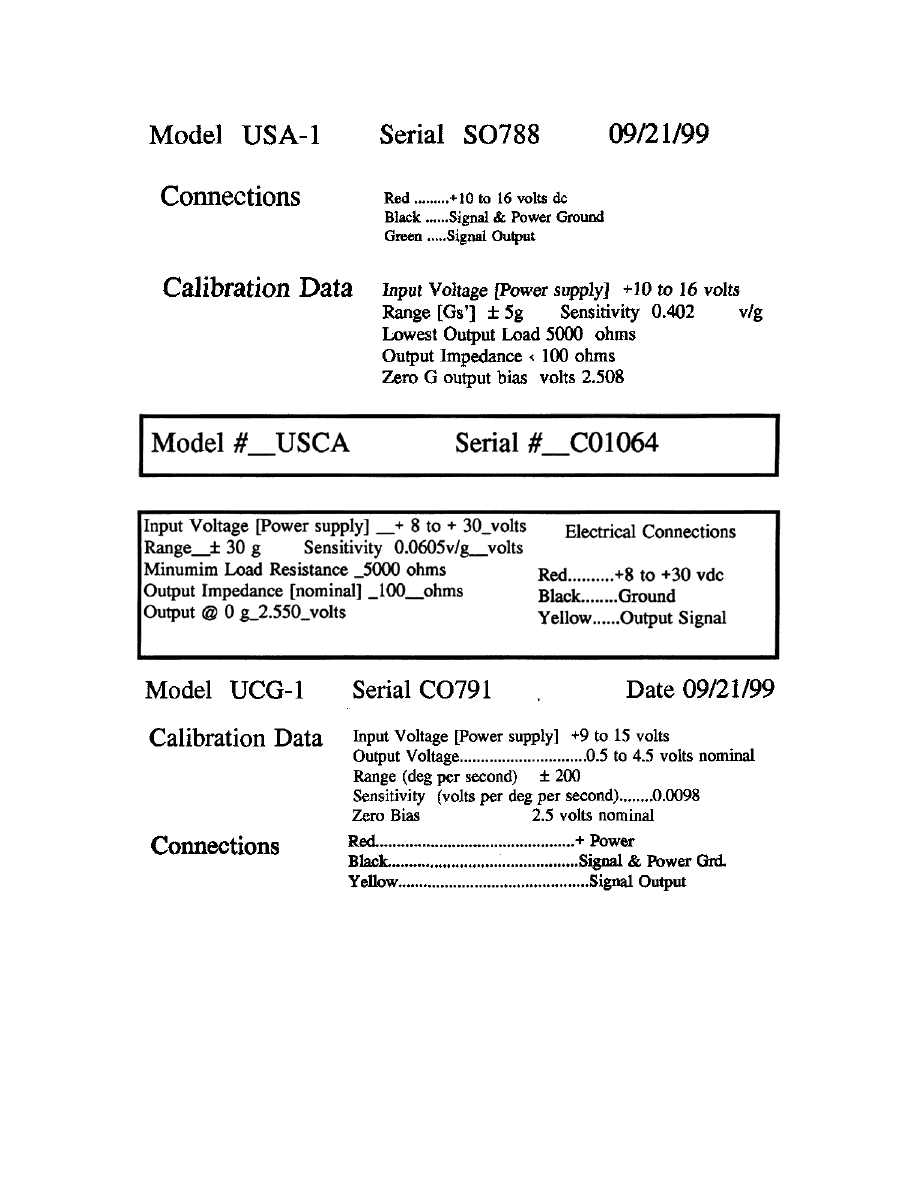
51
Figure A.7: Specification sheets for UCB added vehicle sensors. top- chassis accelerometer
middle- hub accelerometer bottom- rate gyro
A.2.3 Preview
Sensors
For relatively straight path motion or for uniform, wide bumps in the road profile it is
sufficient to use only range finding units to obtain preview information. This assumption
52
simplifies the sensor requirements and, as shown in Section 3.2.2, the preview processing
algorithm.
Two types of sensors were explored:
1. Frequency Modulated Continuous Wave (FMCW) radar by O’Conner
Engineering
2. WTA24-P5401 LED optical sensor by Sick Optic
FMCW Radar Sensor
The FMCW radar has a central frequency of 24.5 GHz and scanning range of 0.5 GHz.
For easy comparison with the WTA24, the other pertinent information is presented in
Specification:
Nominal Value:
Range
1.0 m - 5.0 m
Range Rate
0 m/s - 40 m/s
Resolution
0.01 m
Reproducibiliy
-
Accuracy
-
Light Spot
0.3 m - 0.6 m
Output
2.5 V - 7.0 V
Response Time
1.1 ms
Table A.4: FMCW radar specifications.
WTA24 Optical Sensor
This sensor consists of a modulated infrared LED, with an average life of 100,000 hours
at 25
°
C, and precision reflectors all mounted inside a rugged diecast metal housing. The
unit meets or exceeds shock and vibration standards: IEC 68-2-27/IEC 68-2-6. The
general specifications of interest are tabulated below:
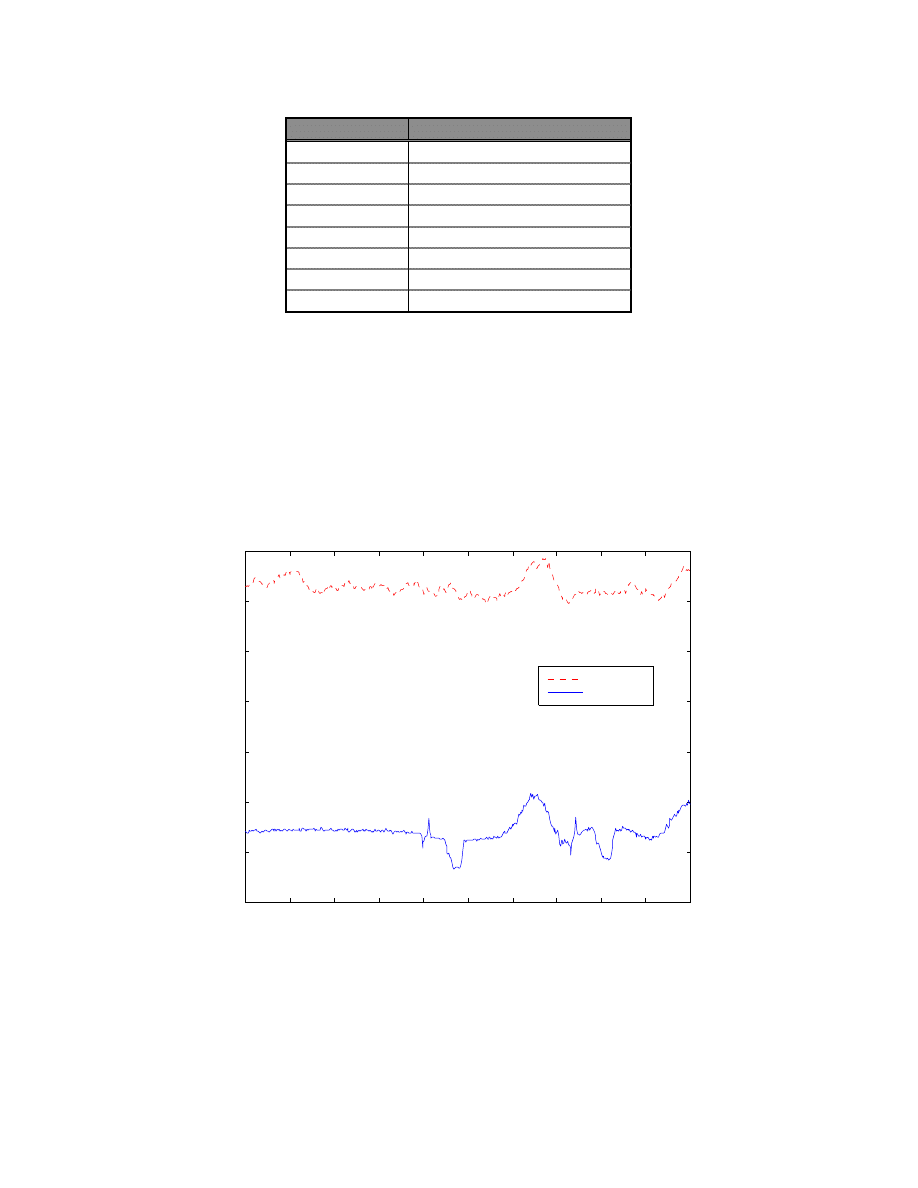
53
Specification:
Nominal Value:
Range
0.6 m - 1.2 m
Range Rate
-
Resolution
0.02 m
Reproducibiliy
0.03 m
Accuracy
0.08 m
Light Spot
0.02 m - 0.03 m
Output
4 mA - 20 mA
Response Time
5.0 ms
Table A.5: WTA24-P5401 optical sensor specifications.
Typical sensor outputs are shown in Figure A.8. The optical sensor detects small bumps
better that the radar, as in the top plots. However, since the radar filters small width, low
frequency disturbances it may better represent the actual system disturbance; tire berth
naturally filters low amplitude disturbances of that type. Bottom plots depict this
phenomenon well around 4.5 seconds.
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Time (sec)
Range (m)
Calibrated Sensor Data − Target: Parking Curbs
Radar
Optical
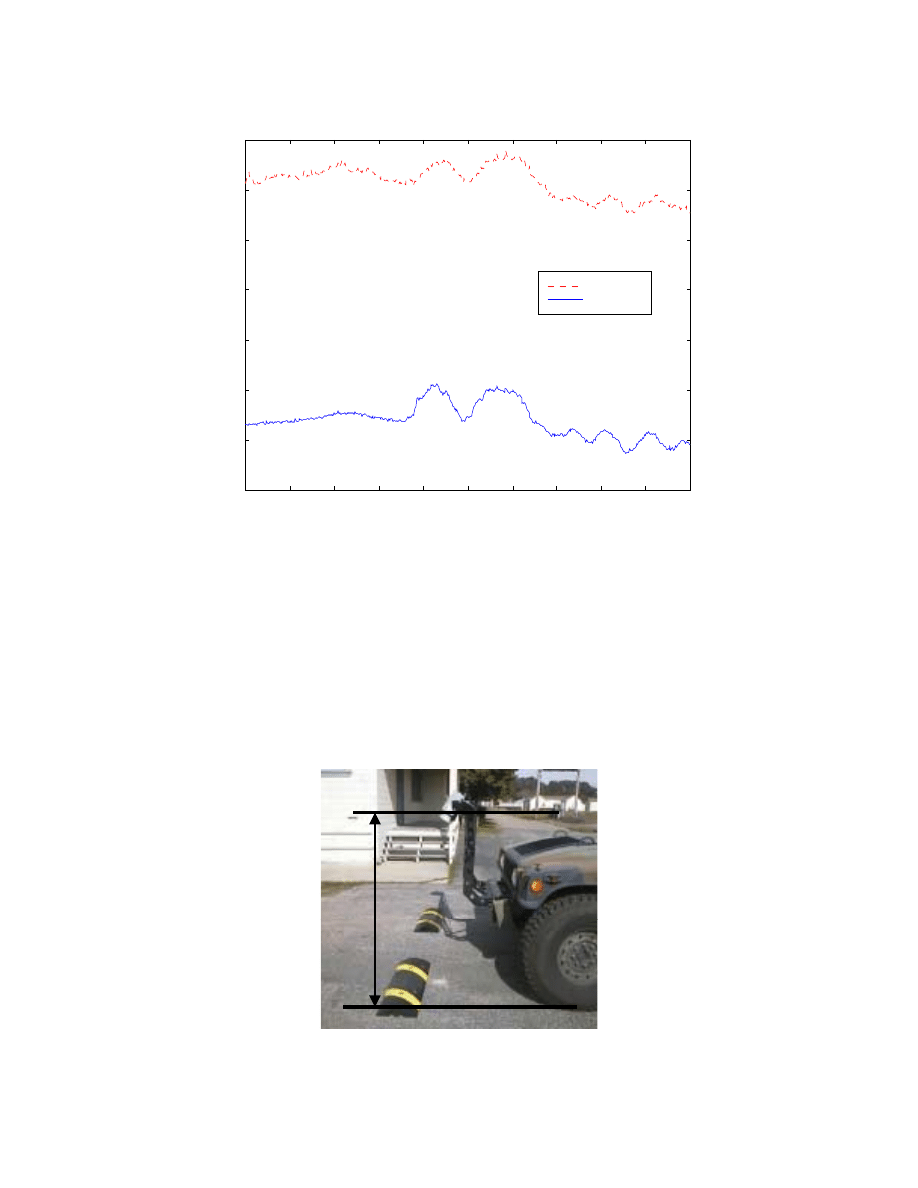
54
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Time (sec)
Range (m)
Calibrated Sensor Data − Target: Off Road / Dirt
Radar
Optical
Figure A.8: Plots of preview sensor comparison: top- Parking curbs, slow bottom- Dirt road,
moderate speed
A.3 Sensor Mount
A custom designed, steel metal frame rigidly attached to the front bumper of the
HMMWV was the original mount, see Figure A.9.
0.6m
1.5m
Figure A.9: Photograph of original radar mount with key dimensions labeled

55
The mount had adjustable radar mount angles (to change the preview distance), strong
structure to endure rugged terrain, high natural frequency to minimize signal noise, and
right angle protrusion to allow the hood to open.
A new mount was designed and built to hold the optical sensors and radar as well as to
modify some features of the original mount paradigm. With the new mount, the drivers
view is not obstructed and the radars are 1 foot higher. The new mount is not as rigid as
the original and changing the preview angle requires construction of additional fixtures,
see photo below. Mount preview characteristics are:
► 9, 0.01 sec steps of preview
► 35 mph maximum vehicle speed
► ~2 samples/ft minimum at 100Hz buffer processing
Figure A.10: Photograph of new, wooden, preview mount in WTA24 configuration
Radar mounts, not shown, allow for vertical, side mount of the radar. Essentially, the
radar looks straight down at a road profile different than the profile under the wheels.
This assisted in application testing of the radar.
56
Appendix B - Signal Processing
A dSpace Autobox is used as the HMMWV control computation computer. Prior to
entering the Autobox some signals require pre-filtering or amplification. The particular
sensor and signal routing configuration determine the type of analog signal processing
required. For instance, noise from the spool position feedback signal was corrupting all
servo-amplifier data on the cable; now, an analog low pass filter is applied prior to
assembling the signals.
Every sensor signal is routed through the center console of the HMMWV. Thus, most of
the analog signal conditioning is computed there. Signals enter the Autobox via a 32-
wire flat ribbon cable.
B.1 Autobox
The development and real time implementation is done using a dSpace multiprocessor
data acquisition and Digital Signal Processing (DSP) unit, which consists of:
I/O Boards:
DS2003: 32 Channel Analog to Digital Converter Board
DS2103: 32 Channel Digital to Analog Converter Board
Digital Signal Processing Boards:
DS1003: TI TMS320C40 Parallel 60MHz DSP board
DS1004: DEC Alpha AXP21164 300MHz DSP board
Expansion Box for In-Vehicle Experiments:
Autobox
dSpace Software Tools:
Cockpit: Virtual Instrument Panel Tool
Trace: Data Acquisition and Variable Display Tool
RTI-MP: Multiprocessor Real time interface for Matlab and
Simulink
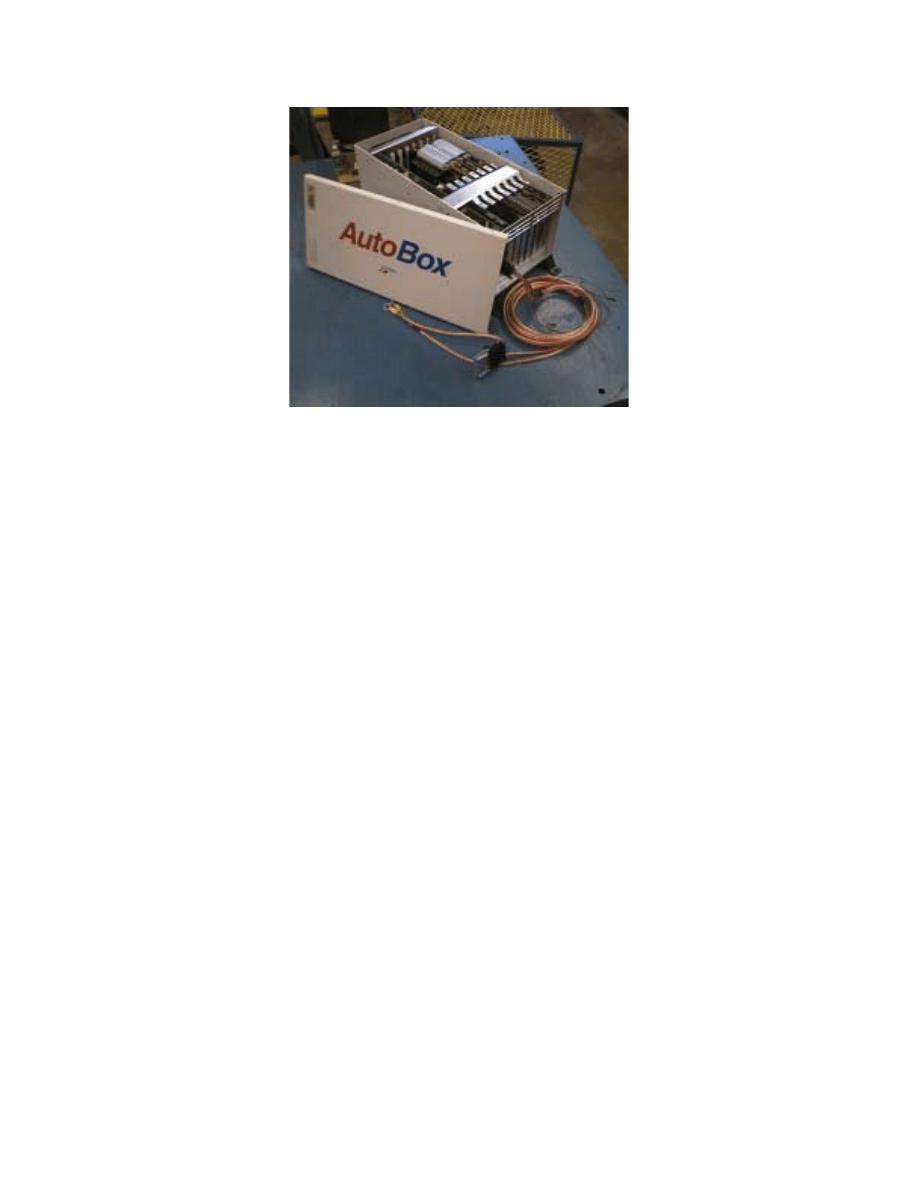
57
Figure B.1: Photograph of AutoBox expansion housing for in-vehicle experiments
The expansion box is specifically designed for in-vehicle experiments and houses all four
dSpace boards. The Autobox receives power directly from the vehicle battery, 24 volts.
Internal DC/DC power supplies regulate power and compensate for any voltage
fluctuations. Interface to a Notebook PC is made via Ethernet cable. The Notebook PC
is used for programming, downloading the control code to the DSP boards and, if desired,
for data acquisition and display. Although the downloaded control code is fully
autonomous, the PC interface is used to change control modes. Figure B.2 depicts the
basic hardware architecture of the dSpace data acquisition and DSP unit.
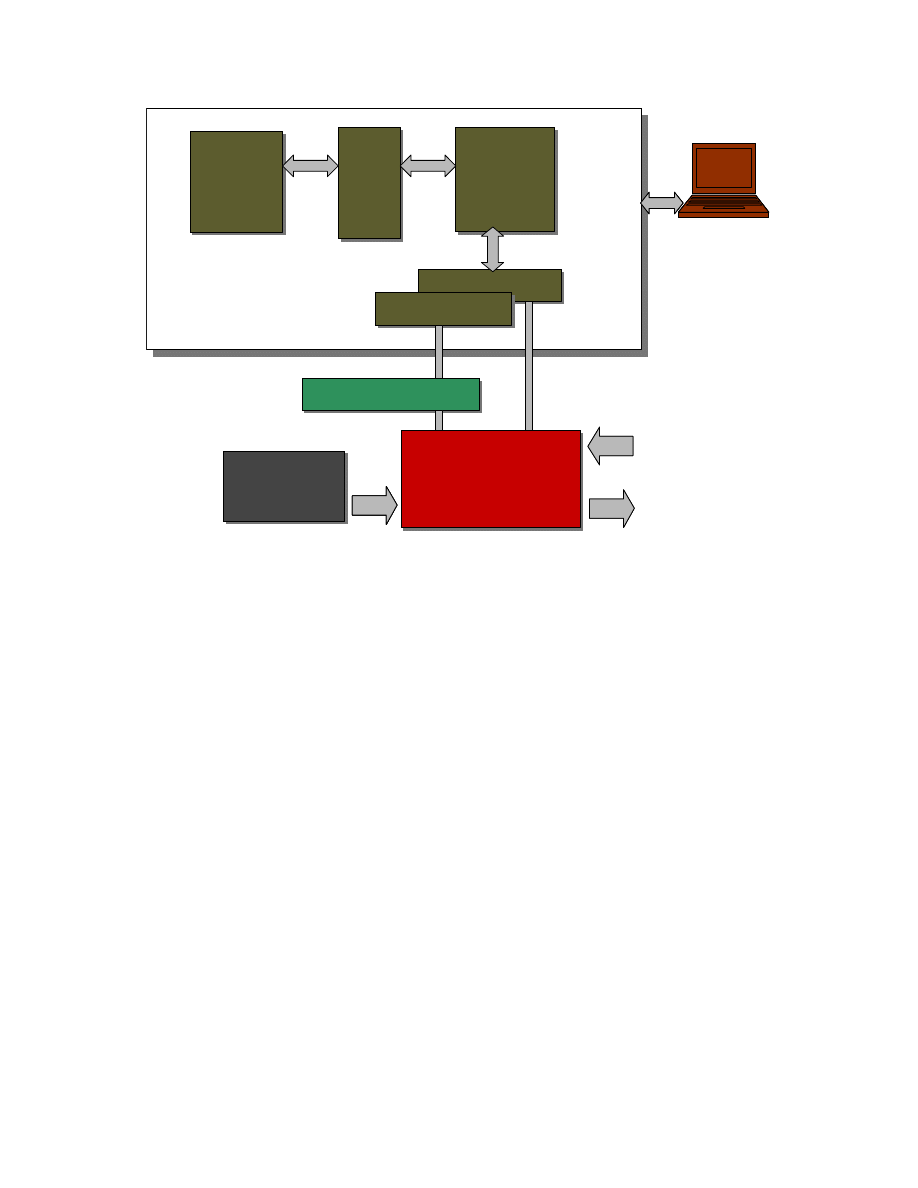
58
From
HMMWV
Sensors
To
HMMWV
Actuators
Servo Amplifiers
Lotus Interface &
Signal Conditioning
Box
UC Berkeley
Sensor
Interface
Auto
Box
ADC Board
IO Boards
DS2003
DS2103
DAC Board
DS1004
Alpha
21164
300 MHz
DS1003
TMS320C40
60 MHz
Dual
Port
RAM
PC
From
HMMWV
Sensors
To
HMMWV
Actuators
Servo Amplifiers
Servo Amplifiers
Lotus Interface &
Signal Conditioning
Box
Lotus Interface &
Signal Conditioning
Box
UC Berkeley
Sensor
Interface
UC Berkeley
Sensor
Interface
UC Berkeley
Sensor
Interface
Auto
Box
ADC Board
IO Boards
DS2003
DS2103
DAC Board
DS1004
Alpha
21164
300 MHz
DS1003
TMS320C40
60 MHz
Dual
Port
RAM
Auto
Box
ADC Board
IO Boards
DS2003
DS2103
DAC Board
DS1004
Alpha
21164
300 MHz
DS1003
TMS320C40
60 MHz
Dual
Port
RAM
Auto
Box
Auto
Box
ADC Board
IO Boards
DS2003
DS2103
DAC Board
ADC Board
ADC Board
IO Boards
DS2003
DS2103
DAC Board
DAC Board
DS1004
Alpha
21164
300 MHz
DS1004
Alpha
21164
300 MHz
DS1003
TMS320C40
60 MHz
DS1003
TMS320C40
60 MHz
Dual
Port
RAM
Dual
Port
RAM
PC
PC
PC
Figure B.2: Diagram of the hardware architecture for active suspension control
All connections to the Autobox are routed through the Lotus Interface Box. The box
provides two pre-established 32pin connectors for the I/O cables. Inside the AutoBox
the I/O boards are connected to the C40 DSP by a peripheral high-speed bus (PHS-bus).
The C40 DSP board processes the I/O, FTC and communication tasks, the Alpha 21164
DSP board is used for complex floating point operations and computationally intensive
processes such as the MPC and preview buffer. Data is transferred between the C40 and
the Alpha via dual-port memory, allowing for fast interrupt-driven communication
channels. A PC connects to the system via Ethernet cable and provides a graphical user
interface for monitoring and interacting with the application running on the system.
Graphic interaction with the real-time application is performed with the dSpace Cockpit
and Trace tools.
59
B.2 Signal Conditioning
Prior to connecting sensor signals to the Autobox it is necessary to filter or amplify some
signals. Inside the Lotus box the signals pick up about 100mV of noise; to maintain a
good signal to noise ratio the respective sensor signals are pre-amplified before the Lotus
box.
When allowable, only software filters are used to ensure uniform phase delay in signals
and also to allow for easy modification of cutoff frequencies.
Hardware Amplifiers & Filters
A sample schematic for the WTA24 preview sensor preamplifier is given in Figure B.3.
In this case, the amplified voltage output (converted from current output) exceeded ±10
volts, but not the 20 volt range, of the ADC so a bias is added during the amplification
stage.
Figure B.3: Schematic for the summing amplifier used for the WTA24
Software Filters
When necessary 40Hz low pass butterworth filters are used. The filter design can be
obtained via the Matlab, “butter” command. No bias removing filters are implemented
on sensor inputs. Static subtraction of sensor bias is sufficient for short term testing.
60
Appendix C - Real-time Software
For the purposes of prototyping, software is the ideal platform as it affords easy
modification. To comply with the requirements of the dSpace compilers, Matlab, by
Math Works Inc., was chosen as the programming language. The real-time interface
multiprocessor (RTI-MP) tool provides automatic code generation directly from Simulink
block diagrams and renders low-level C programming unnecessary. Simulink is a
graphical interface to the Matlab software. When practical, code is written graphically
using existing Simulink components from standard libraries. Upon occasion it is
necessary to construct custom blocks of code, S-functions, to perform complicated
functions, such as the MPC and the preview buffer algorithms.
This Appendix is intended as a User’s Guide to the HMMWV software.
C.1 dSpace/Simulink Environment
Versions
Matlab
Version: 5.1.1.4
Date: September 2, 1997
Toolboxes:
Simulink Fuzzy
Logic*
Real-Time Workshop (RTW) Mu-Analysis and Synthesis*
Signal Processing
System Identification*
Control System
QFT Control Design*
dSpace Libraries
Partial Differential Equation*
Nonlinear Control Design*
* Installed but not necessary in the current implementation.
Table C.1: Matlab version and installed toolboxes
61
To obtain the version listed above, version 5.1.1 was installed and a Matlab provided
update program was run. In addition to the toolboxes above, the “State Flow” toolbox
would be useful. One of the primary functions of the code is to change the states of the
controller; pre-defined state transition software would have aided greatly in this regard.
dSpace
Version: 1.3
Build #: 1998110901
Components:
RTI1003
Real-Time Interface to Simulink
3.2
RTI-MP
RTI for Multiprocessor Systems
3.2
MLIBN
Matlab-DSP Interface Library
3.1
MTRC40N
Real-Time Trace Module for Matlab
3.1
Table C.2: dSpace version and components
During the course of the project dSpace version 2.1 was received. Due to some slight
bugs, the new software was never used for HMMWV control.
Configurations
Hardware configurations and setup parameters for the boards are set according to the
dSpace documentation. A summary of the important settings is provided below:
IP address of Autobox:
128.32.14.44
I/O Address for DS1003:
318-31F
h
I/O Address for DS1004:
310-317
h
Table C.3: Hardware addresses
DS2003 A/D Settings
Hardware:
PHS-Bus Base Address:
20
h
DIP-Switch Setting:
0010
Software:
±
10 V, 15 bit resolution on all functional channels. All 32
channels are used.
Table C.4: ADC settings
62
DS2103 D/A Settings
Hardware:
PHS-Bus Base Address:
90
h
DIP-Switch Setting:
1001
Software:
±
10 V, 14 bit resolution on all functional channels. Only odd
numbered channels 5-19 are used. Upon initialization,
termination, and errors the output voltage is set to zero.
Table C.5: DAC settings
Multiprocessor Setup
Scheduler mode: multiple timer tasks
Basic step size: 0.001 sec
DS1003 Solver: ode4
DS1004 Solver: discrete
Table C.6: Multiprocessor information
To determine the best paradigm for data relay across the dual port memory, see below,
application tests were conducted. From the results: the Alpha board runs a 10ms and
30ms task only and data transfer from the TI board to the Alpha board is conducted via
virtual shared memory. Data transfer from the Alpha board to the TI board is conducted
via swinging buffer.
Swinging buffer – data is written to the buffer and not overwritten until all of the data
from one write process is read. This method guarantees congruent data but requires 3
times the storage space.
Virtual shared memory – data read and write processes occur when the respective process
is ready to read or write. Data is not guaranteed congruent but no additional memory
space is required.
More information on the protocols is given in the dSpace documentation.
C.2 Implementation Architecture
Below is the system level block diagram of the HMMWV implementation. Graphically,
the components of the control software are divided into several subcategories: input
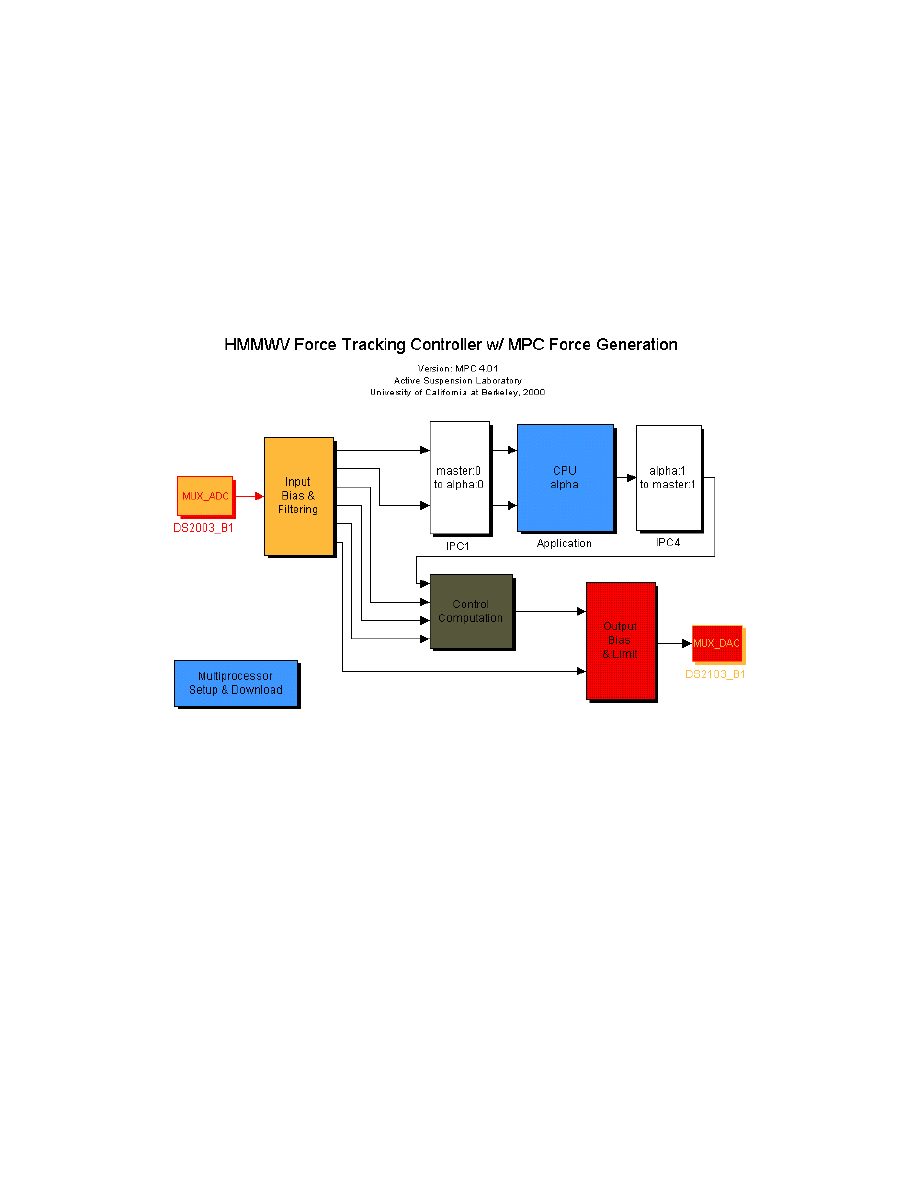
63
processing, control computation, output processing and alpha processes. There are two
types of blocks, program blocks and hardware interface blocks. Program blocks, e.g.
“Input Bias & Filtering” and “CPU alpha”, use standard Simulink programming practices
to implement the control. Hardware blocks, e.g. “MUX_ADC” and “master:0 to
alpha:0”, are provided by dSpace and handle the reading and writing of data to the
respective boards. After a general overview of the program structure, the following
sections will detail the logic underneath the custom program blocks.
Figure C.1: Simulink model of the system implementation
The set of 32 input signals is read from the ADC card onto the TI board. These signals
are then calibrated, grouped, and filtered. From there some signals are transferred to the
Alpha board via the dual port memory blocks. Other signals remain on the TI board and
are connected to the control computation block. After the control algorithm computes the
desired spool voltage, the 4 command signals are passed through a safety and limit check
before being transferred to the DAC. Bypass valve status is set within the “Output Bias
& Limit” block. The “Multiprocessor Setup & Download” block is a graphical way to
call the build and download commands for the system.
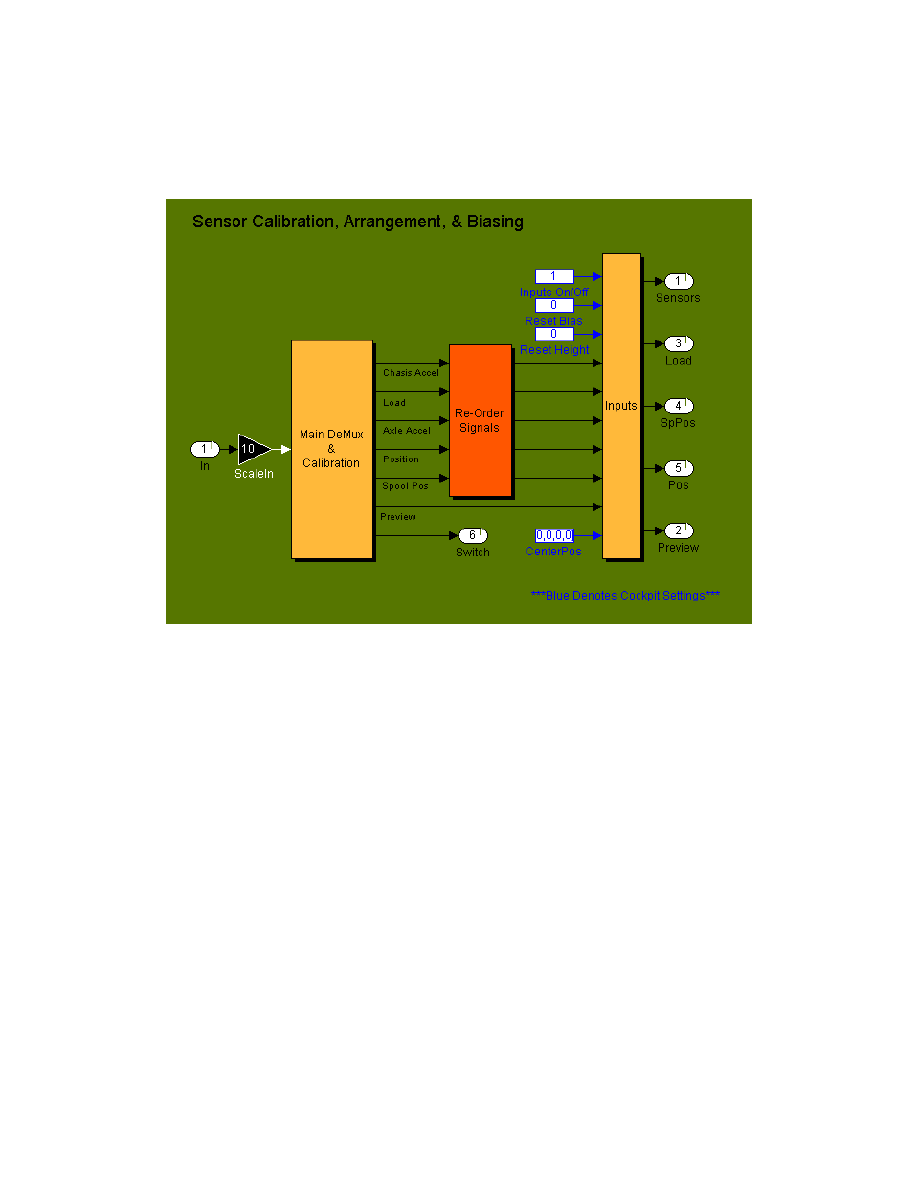
64
C.2.1
Signal Processing Modules
Input Processing
Figure C.2: Simulink model of underneath the “Input Bias & Filtering” block
Signals received and sent to the ADC/DAC are an order of magnitude less than the
physical, measured signal. After scaling the input, the signals are calibrated according to
specification documents and grouped with like signals. The sensor inputs are not ordered
in a consistent manner, the “Re-Order Signals” block puts all data in the sequence:
1. LHF – Left Hand Front
2. LHR – Left Hand Rear
3. RHF – Right Hand Front
4. RHR – Right Hand Rear
Thus creating a standard numbering order for the actuators. The “Inputs” block contains
all of the signal filters and bias subtraction schemes.
At this stage the pseudo state transition methods become evident. Constant values of 0 or
1 are used to turn certain features on or off. The value of 1 or 0 can be changed from
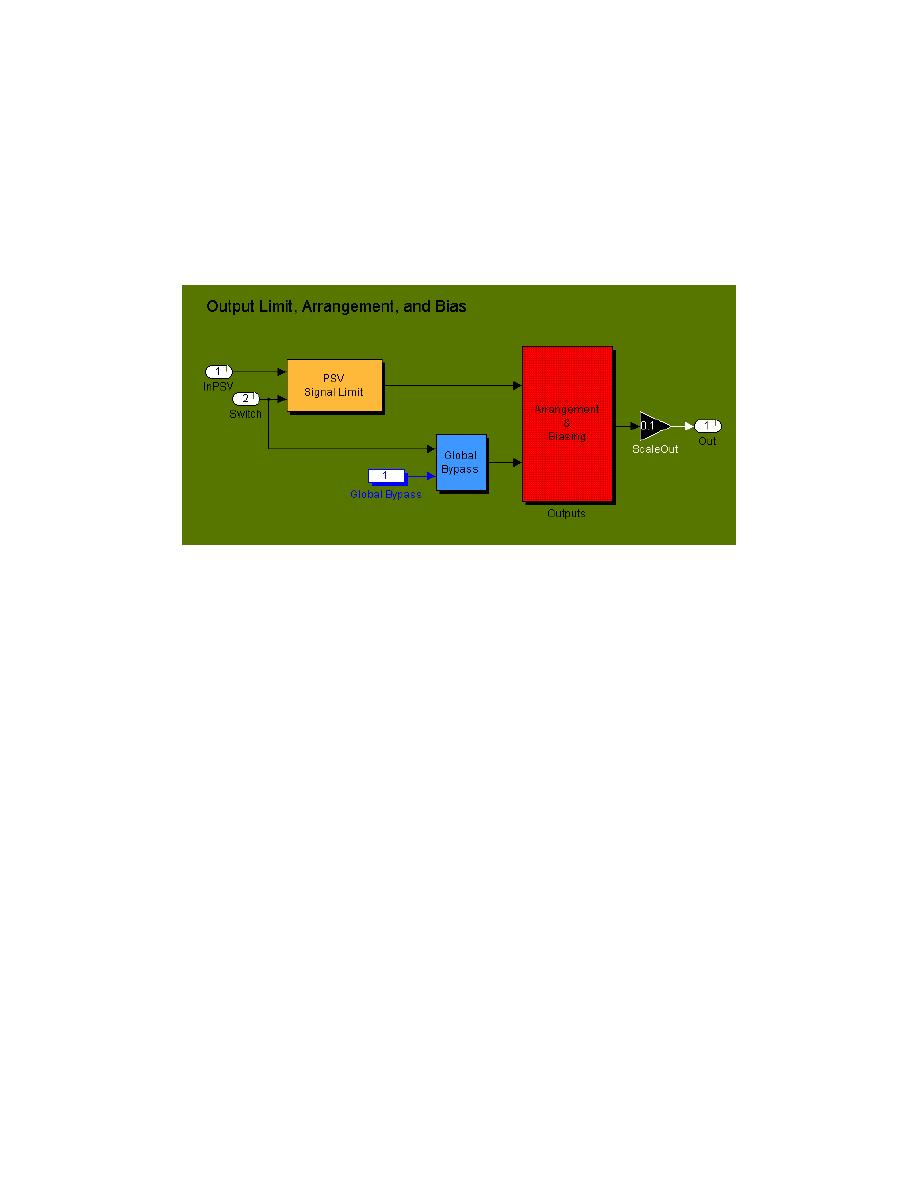
65
within Cockpit. For instance, the rising edge of the “Reset Bias” bit is used start an
integrator to determine the dc bias. A simpler example of the pseudo state transition is
the “Inputs On/Off” bit, when this bit is high the input signals are enabled and not
enabled when zero.
Output Processing
Figure C.3: Simulink model of underneath the “Output Bias & Limit” block
Aside from scaling and arranging the output signals, the essence of the output code is to
allow for safe operation of the HMMWV hydraulics by providing a method for
emergency stabilization via software, as per Section 3.1. Of course, stopping the engine
will also stop chassis motion but is very harsh on the system.
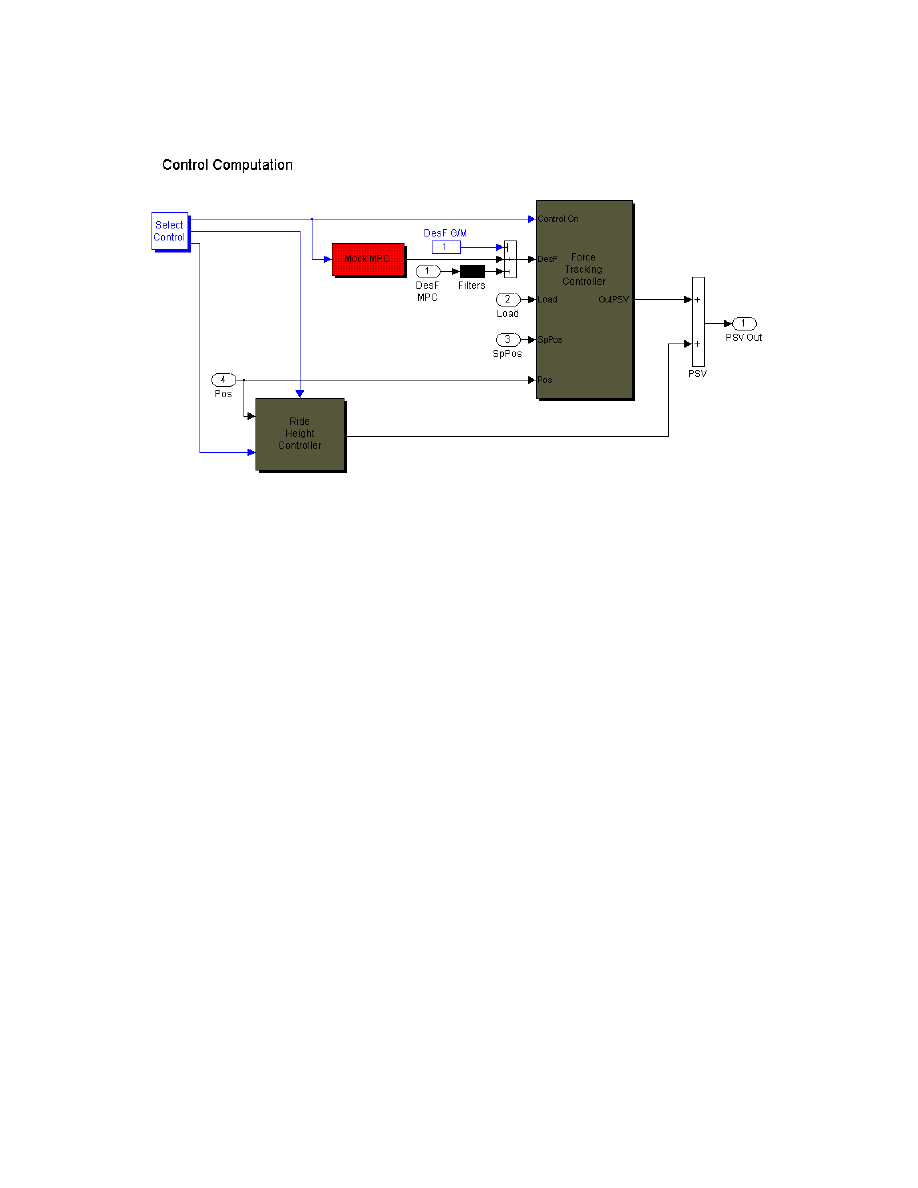
66
C.2.2 Control
Modules
Figure C.4: Simulink model of underneath the “Control Computation” block
An integer, set from Cockpit determines which primary actuator control scheme is
enabled by the “Select Control” block. The desired force for the force-tracking controller
is either generated by the “Mock MPC” or computed on the Alpha board by a high-level
controller.
Ride Height, PI Control Module
PI controller provides a means to ensure a stable chassis when the pump is on and there
are no road disturbances. From the LVDT we know the expansion of the actuator, x.
Given some desired expansion x
des
a proportional integral (PI) controller was designed
such that:
∫
−
+
−
=
)
(
)
(
x
x
K
x
x
K
V
des
I
des
p
spool
(C.1)
The gain set {K
p
= 150, K
I
= 50} was determined empirically to achieve a reasonable
response with moderate comfort to the passengers. The Simulink diagram of the control
code for the four actuators is shown below. Given this code, any desired position
trajectory, within the limits of the actuators, can be obtained.
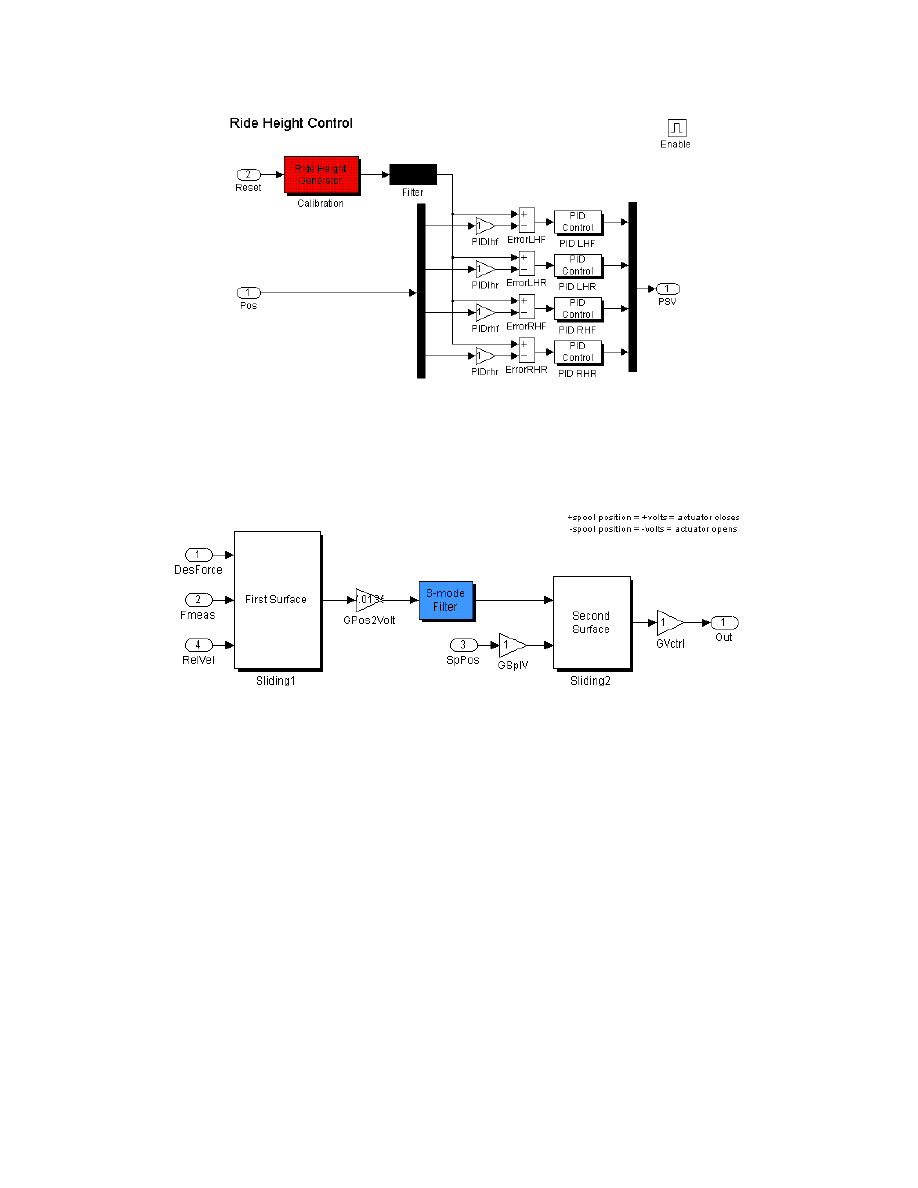
67
Figure C.5: Simulink model of the “Ride Height Controller”
Force Tracking Control Module
Figure C.6: Simulink model of the final version of the FTC for one actuator.
From the derivation of the controller in Chapter 2, there are two surfaces coupled by a
filter, as seen in Figure C.6. Controller surfaces were tuned independently. It is not
shown here but a scaled desired trajectory was passed directly to the second surface
during tuning. Furthermore, an open loop control signal could be sent directly to the
spool valve servo amplifier. This was important for collecting the data needed for
parameter estimation. Below is one incarnation of the ORD FTC first surface described
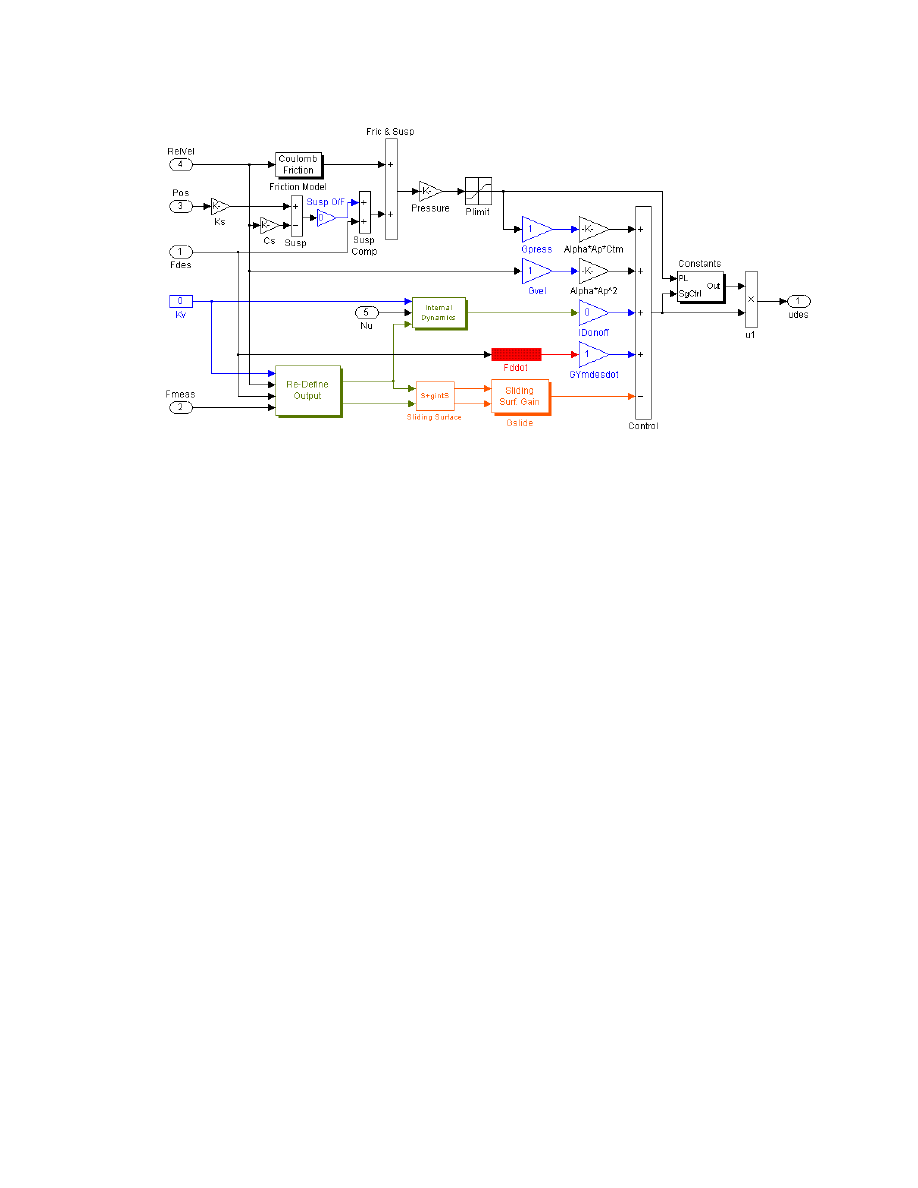
68
Figure C.7: Simulink model of a fully populated force surface for one actuator’s FTC
Notice the plethora of gain blocks. These blocks allow the respective terms to be
adjusted from Cockpit. The performance of the FTC is determined by the accuracy of the
parameters. The gain blocks allow real-time manipulation of the values.
C.2.3 Subsystem
Modules
Subsystem modules were computed on the Alpha board. In the code structure shown in
Figure C.8, there are three primary computations for the Alpha board: the MPC, the
preview buffer and the Kalman Filter (KF). The base sampling rate for the board is
10ms; this means the inputs and outputs are processed at 10ms. Due to processor
constraints the MPC is run at a 30ms sampling rate. To simplify the interactions, the KF,
HRF, and Sky Hook, are also run at 30ms. Transfer of data between tasks of different
sampling rates is done one of two ways:
1. Faster task (10ms) to slower task transitions: zero order hold
2. Slower task (“MPC Mod”) to faster task (output): data is written to a buffer.
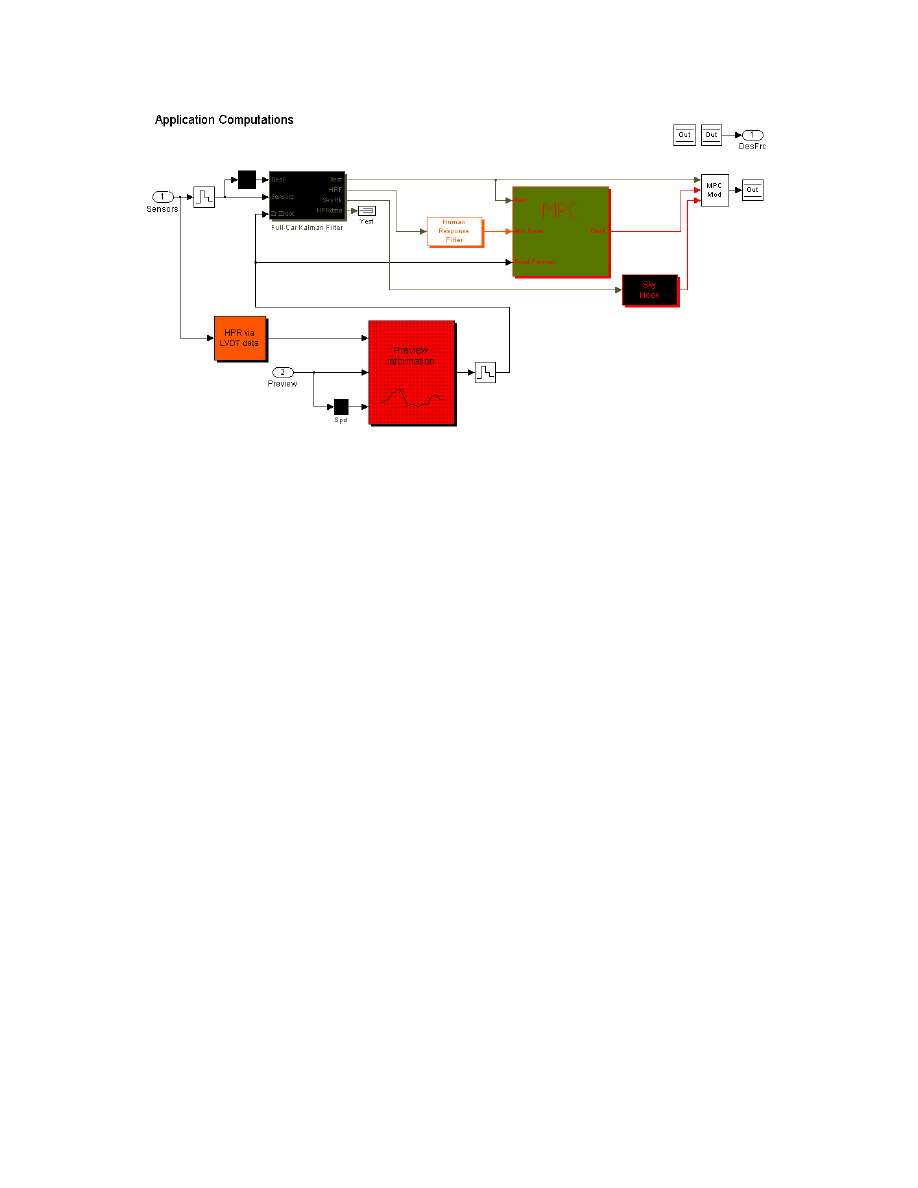
69
Figure C.8: Simulink model of “CPU Alpha”, notice inter-task data transfer methods

70
Appendix D - Test Track
The HMMWV is stored at the University of California’s Richmond Field Station (RFS)
in Richmond, CA. In addition to storage, RFS provides the local for testing. The
available testing paradigms are: 1. a custom test track, described below, 2. gravel roads,
3. dirt roads, and 4. off-road, grassy terrain.
For the test track we have opted for an asphalt, instead of a dirt, road surface to limit the
effects of weather, erosion, and wear. Six standard, hard rubber speed bumps,
manufactured by Scientific Developments Inc., are used. There are 10 possible
temporary locations for the bumps along the 32’ test region. Bump raisers are used to
increase the height of the bumps in 1.5” increments. Photos of the test track follow.
Figure D.1: Photographs of RFS active suspension test track
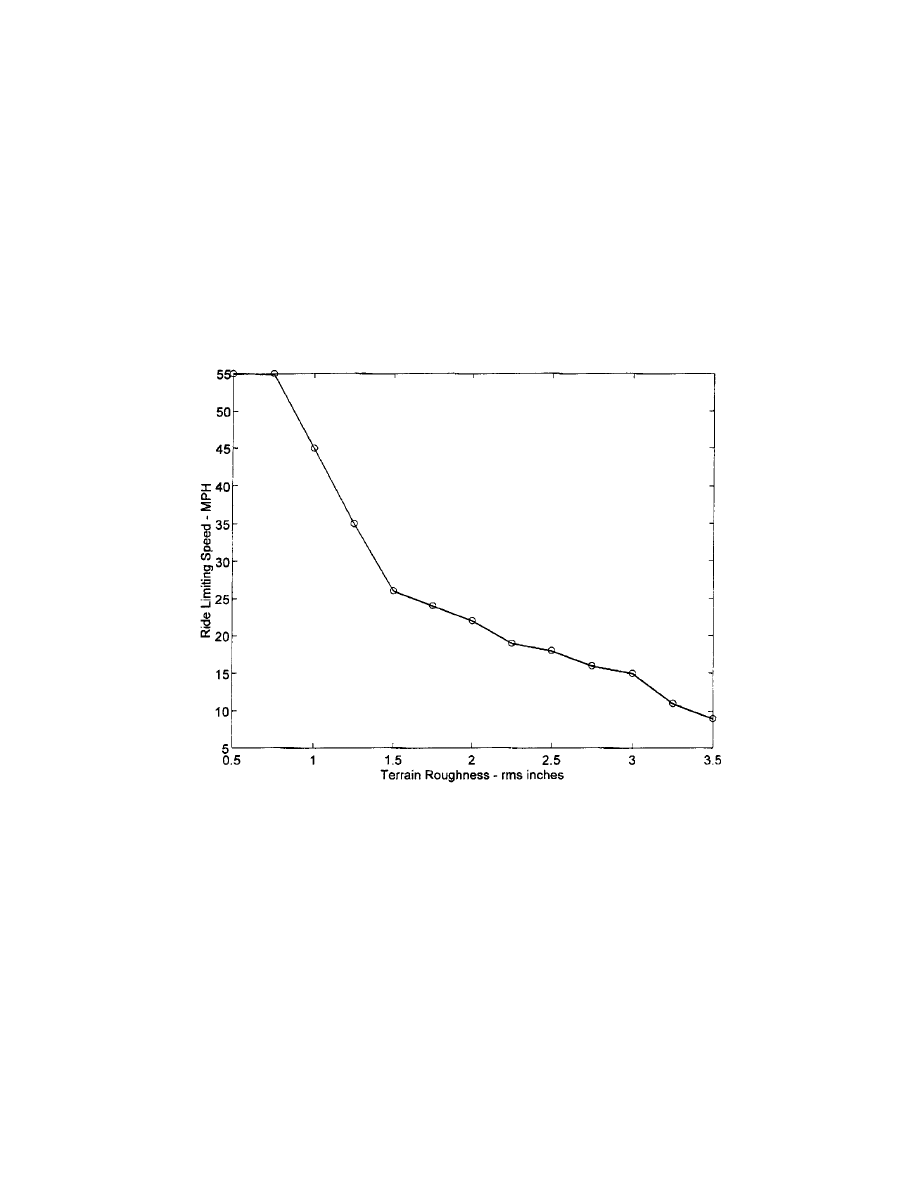
71
TARDEC has conducted extensive research on terrain roughness values and how they
relate to the human drivable speed for a given road. The maximum drivable speed is the
speed that the Cumulative Absorbed Power, see Section 3.4, reaches 6 Watts. Figure D.2
presents this information for a standard HMMWV. Although is has not yet been done, a
terrain roughness value will be computed for the test track profile. Perhaps some sections
of the dirt, gravel or off-road test tracks will be measured and converted as well. With
that information, a true valuation of the MPC results presented herein can be obtained.
Figure D.2: Plot of rate limiting speed for a given terrain roughness. 55mph is taken as the
maximum attainable HMMWV speed.
72
Appendix E - Glossary
Nomenclature
Piston area = 0.0044 m
2
Discharge coefficient = 0.7
Leakage coefficient =
2
/
em
im
C
C
+
= 15e-12
Suspension damping = 12000 Ns/m
Tire damping = 200 Ns/m
Actuator
force
Friction force = 120 N
Voltage to position conversion factor = 1481 V/m
Suspension spring stiffness = 240 kN/m
Tire spring stiffness = 1000 kN/m
Relative velocity, chassis → axle = 2.1
Sprung mass = 2800 kg
Un-sprung mass = 270 kg
Equivalent
mass
(
)
s
u
m
m
1
1
+
Supply pressure = 20684 kN/m
2
Pressure induced by load
Spool valve position
Bypass valve area
Input voltage command
Total volume of actuator cylinder chamber
Spool valve width = 0.008 m
Hydraulic coefficient =
t
V
/
4
β
= 2.273e9 N/m
5
Bulk modulus of hydraulic fluid
Specific gravity of hydraulic fluid = 3500
p
A
i
d
C
tm
C
s
c
t
c
A
F
f
F
k
s
m
eq
m
s
k
t
k
s
P
L
P
1
u
2
u
t
V
w
α
β
ρ
V
v
k
u
m

73
Acronyms
RHC
Ride
Height
Controller
FTC
Force
Tracking
Controller
ORD
Output Redefinition of FTC
SKY
Sky Hook Damping Controller
LQR
Linear
Quadratic
Regulator
FSLQ
Frequency Shaped Linear Quadratic Controller
VDC
Velocity
Damping
Controller
MPC
Model
Predictive
Controller
MPC
p
Model Predictive Controller with Preview
HRF
Human
Response
Filter
CAP
Cumulative
Absorbed
Power
HPR
Heave Pitch & Roll
pH
Preview Horizon for MPC
DOF
Degree
of
Freedom
LHF
Left/Right
Hand
Front/Rear
LVDT
Linear Variable Displacement Transducer
BASR
Berkeley Active Suspension Rig
HMMWV
High Mobility Multi-Purpose Wheeled Vehicle
UCB
The University of California at Berkeley
SSCI
Scientific Systems Company Inc.
SBIR
Small Business Innovative Research
TACOM
Tank Automotive & Armaments Command
TARDEC
Tank Automotive Research, Development Center
Document Outline
- Abstract
- Table of Contents
- List of Figures
- List of Tables
- Preface
- Acknowledgments
- Introduction
- FTC Design
- Subsystems
- High Level Controllers
- Experimental Results
- Conclusions
- References
- HMMWV Hardware
- Signal Processing
- Real-time Software
- Test Track
- Glossary
Wyszukiwarka
Podobne podstrony:
An Overreaction Implementation of the Coherent Market Hypothesis and Options Pricing
Operation of an IGBT in a self clamped inductive switching circuit (SCIS) for automotive ignition p
Design and implementation of Psychoacoustics Equalizer for Infotainment
Munster Application of an acoustic enhancement system for outdoor venues
S A Gorden Eyes of an Eagle a Novel of Gravity Controlled v5
Handbook of Occupational Hazards and Controls for Staff in Central Processing
S A Gorden Eyes of an Eagle a Novel of Gravity Controlled v5
Using an Xbox 360 Controller for Windows
Extending Research on the Utility of an Adjunctive Emotion Regulation Group Therapy for Deliberate S
Resolution CM ResCMN(2008)1 on the implementation of the Framework Convention for the Protection of
Operation of an IGBT in a self clamped inductive switching circuit (SCIS) for automotive ignition p
An Active Power Filter Implemented With A Three Level Npc Voltage Source Inverter
Modeling and Control of an Electric Arc Furnace
Use of an Attenuated Computer Virus as a Mechanism for Teaching Epidemiology
H Infinity State Feedback Control for a Class of Networked Cascade Control Systems With Uncertain De
Design of an Artificial Immune System as a Novel Anomaly Detector for Combating Financial Fraud in t
Linus Torvalds and David Diamond Just for FUN The Story of an Accidental Revolutionary
OBE Gods of the Shroud Free Preview
więcej podobnych podstron