
Ronald Bewley, Time Series Forecasting
1. Decomposition of Time Series
While the focus of this book is on forecasting, it is necessary to understand the
nature of the time series being predicted and some of the key historical developments in
the subject. The notion that a time series can be decomposed into additive or
multiplicative components representing trends, long-term cycles, seasonality and random
fluctuations has been the mainstay of much of forecasting’s development. However, a
growing literature has emerged on the modelling of seasonality, led by Svend Hylleberg
and Philip Hans Frances, that has challenged this approach.
The detrending of time series has similarly been the subject of much research and
development, from the early simple averaging techniques, through smoothing models and,
more recently, so-called smoothing filters.
Whether or not one accepts the classical decomposition of time series, or the joint
modelling of all the components, there is little doubt that the more advanced forecasting
methods considered in this book are sufficiently complex without joint modelling to
warrant their investigation assuming that data have been suitable transformed before the
forecasting analysis has commenced. Of course, this point of view does not preclude
awareness of the main criticisms of this approach nor some simple tests to detect the
possible importance of ignoring even more sophisticated approaches.
1.1 The Nature of Time Series
1.1.1 Definitions
A time series is a sequence of observations measured over time (usually at equally
spaced intervals; e.g. weekly, monthly, or annually) and can take the form of, say, Gross
Domestic Product each quarter; annual rainfall; or the daily Stock Market Index.
Within the definition of time series, two distinctions can be made. First, a time
series is said to be deterministic or stochastic depending on whether or not the series is
perfectly predictable. In econometrics, data are stochastic in that there is an inherent
random component which cannot be predicted, although it is sometimes assumed that there
is an underlying deterministic component buried in unpredictable ‘noise’. For example, in
the simple regression equation
y
t
=
α
+
β
x
t
+ u
t
,
the variable x is fixed, or given, as are the parameters
α
and
β
. Thus (
α
+
β
x
t
) is a

UNSW, July 2000 Draft, Decomposition of Time Series
deterministic component buried in noise, denoted by u
t
, the disturbance term.
A second distinction can be made between continuous and discrete time series. A
continuous series can, in theory, be measured at any point in time (e.g. there is always a
temperature, whether or not one chooses to measure it) although the measuring device
(e.g. a thermometer) may only permit the series to be collected with a finite interval (e.g.
every 1/100th second) giving rise to a particular type of discrete process known as a
sampled series. On the other hand, a discrete process can only be observed at given points
in time. The usual distinction between continuous and discrete series results from the
difference between stocks and flows. For example, the stock of wealth is continuous but
income, the flow, only exists on, say, a weekly, monthly or annual basis. Note the two
statements “My wealth is $10,000” and “My income is $1,000”. The former statement
might be true but the latter is meaningless without reference to the time period.
1.1.2 Time Series Versus Causal Modelling
Typically in econometrics, causal models are preferred to simple extrapolative
techniques. In causal models, the econometrician specifies some behavioural relationship
and estimates the parameters using regression techniques. Given such an estimated
relationship, past movements in the series can be explained, and future movements in the
series predicted, once assumptions are made about the behaviour of the independent
variables in the model. However, there are many cases when one cannot, or one prefers
not to, build a causal model:
1)
insufficient is known about behavioural relationships.
2)
lack of, or conflicting, theory.
3)
insufficient data on explanatory variables.
4)
a causal model is too expensive to build.
5)
expertise unavailable.
6)
causal model is not cost effective.
7)
time series models may be more accurate.
Time series models are not without some theoretical justification and there is little
doubt the popularity of time series analysis led econometricians to consider a wider class
of dynamic specification in the more conventional approach. Furthermore, there are some
2

Ronald Bewley, Time Series Forecasting
direct benefits to employing time series modelling procedures:
1)
limited computer storage needed for some time series models.
2)
some
time
series
models
are
automatic
in
that
user
intervention is not required to update the forecasts each
period.
3)
some time series models are evolutionary in that the
coefficients and, hence, the trends adapt as new information
is received.
4)
some time series models can be ‘put back on track’
automatically after a poor forecast.
1.1.3 Classical Decomposition of Time Series
In the classical decomposition of a time series, any series is thought to comprise
four components: trend, cycle, seasonal and random.
Trend
in this context trend does not imply a monotonically
increasing or decreasing series but simply the lack of a
constant mean. That is, different sections of a series may
have quite different sample means indicating that the
population mean is time dependent.
Cycle
refers to patterns, or waves, in the data that are repeated after
approximately
equal
intervals
with
approximately
equal
intensity.
For
example,
some
economists
believe
that
‘business cycles’ repeat themselves every four or five years
but occasionally a recession may last considerably longer
than the usual 1-2 years.
Seasonal
refers to a cycle of one year duration. There may, however,
be one or more peaks in a year and, in high frequency data, a
‘year’ may refer to a week and daily variation corresponds to
‘seasonal’ behaviour.
Random
refers to (unpredictable) variation not covered by the above.
3

UNSW, July 2000 Draft, Decomposition of Time Series
By way of example, consider the decomposition of the Australian monthly current
account series:-
Trend - is Australia on a downhill track? This raises the important question of when a
long-term cycle becomes a trend. For this reason, trend and cycle are often amalgamated
into one ‘trend’ component.
Cycle - (business cycle) The economy finds it hard to meet demand at the peak of a
business cycle and so imports more (‘The economy overheats’).
Seasonality - imports of clothing are seasonal, as are agricultural exports and foreign aid
payments.
Random - whether a 747 jumbo jet is imported on September 1 or August 30 makes a
large difference to the behaviour of the monthly account.
1.1.4 Trend Estimation
It is usually optimal to jointly estimate the trend and other time series components.
However, this approach usually requires a formal econometric model to be specified.
Alternatively, it can be useful to consider aggregating observations over time to
smooth data so as to highlight any trend. In particular, monthly data may be aggregated to
quarterly data and this will have a smoothing effect as random variation is averaged over
successive periods. However, such ‘temporal aggregation’ reduces the data set to, say, one
third of the original set when monthly data are aggregated into quarterly data. Seasonality
is typically removed or reduced by temporal aggregation.
Although temporal aggregation smooths data, there are certain negative aspects. For
example, when monthly data are aggregated into annual data, one must wait a full year or
more before a new observation is collected. Consequently new trends are detected much
later than with monthly data.
It is important in time series analysis to appreciate that a mean does not always
exist. While a sample mean can always be computed, inferences about a population mean
require that such a mean exists. For example, consider a time trend model
y
t
=
α
+
β
t + u
t
In such cases, no (constant) mean exists. One can, however, consider the concept of a
local mean in some neighbourhood. The mechanism for evolution of the local mean is the
4
Ronald Bewley, Time Series Forecasting
trend.
Consider the following averaging processes:-
Take the mean of adjacent pairs
(y
1
+ y
2
)/2 , (y
3
+ y
4
)/2 , ...
Clearly this averaging process reduces the size of the data set. However, it is a simple
matter to consider overlapping averages:
(y
1
+ y
2
)/2 , (y
2
+ y
3
)/2 , (y
3
+ y
4
)/2 , ...
and this variant only loses one observation while smoothing the series. Note, however, that
the average of observations 1 and 2 is aligned with time t = 1½ which has no
interpretation with discrete series. If the m successive observations are averaged and m is
odd, there is no problem:
(y
t-1
+ y
t
+ y
t+1
)/3 = m
t
(1.1.1)
is centred at time t and m
t
is known as a 3-point moving average.
Example Consider the data in column 1 of Table 1.1. Each element of column 2 is the
sum of three consecutive observations as defined by equation (1). The third column is the
second divided by three, i.e. the MA(3) process but note that there is no estimate of the
MA(3) corresponding to the first or last observation.
Table 1.1: Computation of an MA(3) Process
y
t
Sum
m
t
10
?
12
33
11
11
30
10
7
24
8
6
15
5
2
?
It is important to note that the longer the MA, that is the number of observations
being averaged, the smoother is the series. An MA(m) removes a cycle of period m but an
5
UNSW, July 2000 Draft, Decomposition of Time Series
MA(m+1) reduces, but does not remove a cycle of period m. For example, with monthly
data, a twelve period MA removes seasonality but a thirteen-period MA has two months
of January in the July average etc. but a less pronounced degree of seasonality exists in
the smoothed data than in the raw data.
Because many interesting cycles are of even length (12 months, 4 quarters, etc.), it
is useful to consider ‘convolutions’ of MA processes in order to ‘centre’ the MA
smoothed data. Consider an MA(3) of an MA(3); that is, the smoothed data are again
smoothed in the same manner.
The first three columns in Table 1.2 have been constructed on the same basis as
the corresponding columns in Table 1.1. Each element in the fourth column is the centred
sum of three consecutive elements of column (3) and the final column has been derived by
dividing the fourth column by 3.
Table 1.2: Computation of an MA(3*3) Process
y
t
Sum
MA(3)
Sum
MA(3*3)
10
?
?
?
12
33
11
?
?
11
30
10
29
9
7
24
8
23
7
6
15
5
?
?
2
?
?
?
The complete calculation for the third element of the smoothed series (9 ) is
derived from
9
= 11 + 10 + 8 = (10+12+11)/3 + (12+11+7)/3 + (11+7+6)/3
3
3
= (1/9) [1(10) + 2(12) + 3(11) + 2(7) + 1(6)]
=
(1/9)
y
1
+
(2/9)
y
2
+
(3/9)
y
3
+
(2/9
)y
4
+
(1/9)
y
5
6

Ronald Bewley, Time Series Forecasting
and it follows that the fourth element of the smoothed series (7 ) is given by
7
=
(1/9)
y
2
+
(2/9)
y
3
+
(3/9)
y
4
+
(2/9
)y
5
+
(1/9)
y
6
The sequence {1/9, 2/9, 3/9, 2/9, 1/9} defines the weights of the MA process or
filter since it filters out the noise in a series. Note that an MA(3*3) has 5 weights, the
weights are symmetric about the central observation, the maximum weight is at the centre,
and the weights sum to unity. A 3 * 3 MA is a centre-weighted MA. In general, an
MA(m*m), with m odd, has weights {1/m
2
, 2/m
2
, ...,m/m
2
, ...1/m
2
} and there are (2m-1)
weights. ‘Even’ MA processes are not centre-weighted but two even MA processes are
centred when convoluted.
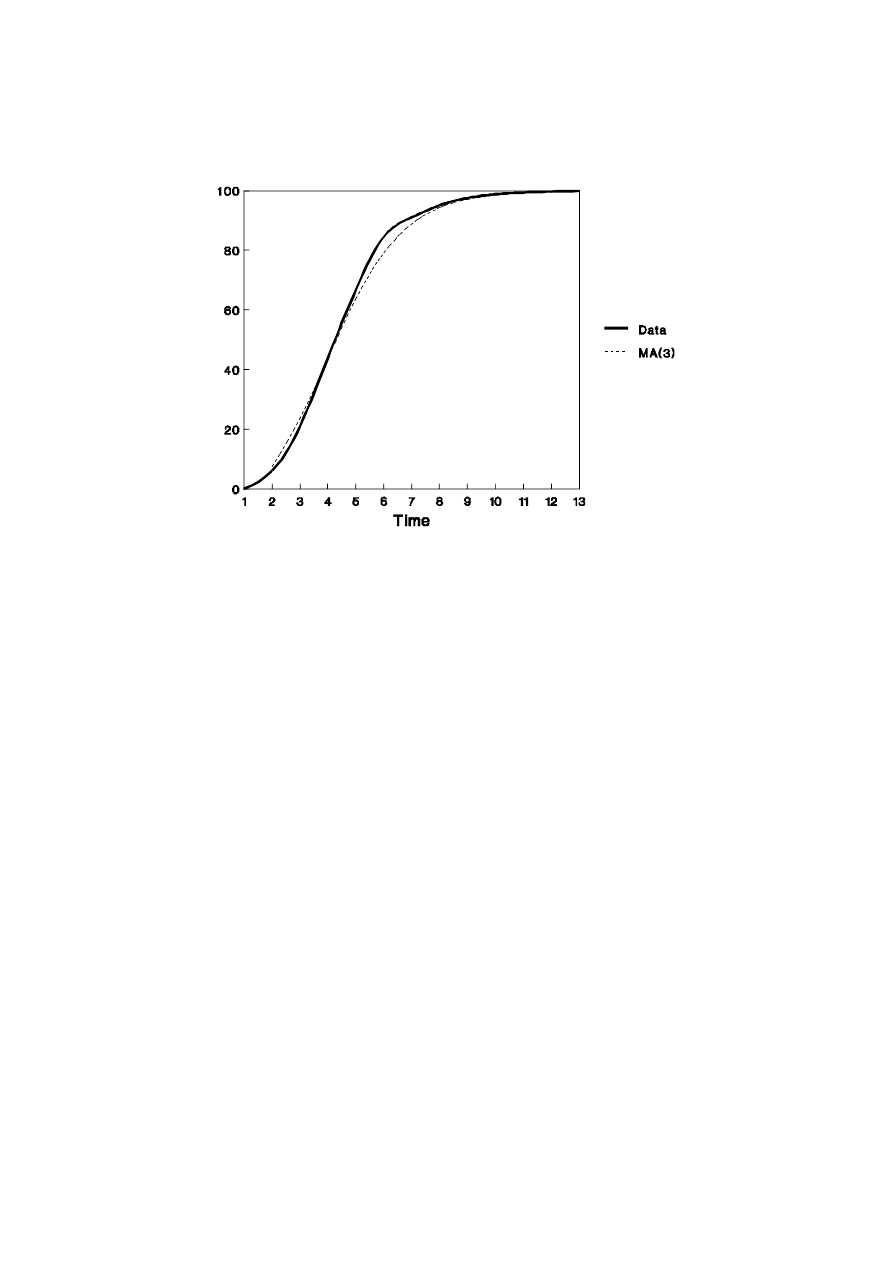
When choosing an MA process, it should be recalled that a longer length produces
less randomness but more data are lost and the MA estimate of the trend is slower to react
to any new trend in the data. For example, consider smoothing a growth curve. An
example is presented in Figure 1. Clearly, the trend estimate MA(3) under-predicts a
decreasing trend and over-predicts an increasing trend.
Because there is a lag of (m-1)/2 periods between the latest observation of the raw
series and the latest smoothed estimate, a one-sided MA is sometimes used. To be useful,
the weights of a one-sided filter need to decline, and sum to unity, as in the following
example
m
t
= 0.6 y
t
+ 0.3 y
t-1
+ 0.1 y
t-2
Optimal choices for the weights in such an MA process are considered in Section 1.2.
1.1.5 Seasonality
Seasonality is a pattern in the data which tends to replicate itself approximately in
successive years. If it were completely regular and, hence, deterministic in nature, it would
not present a problem. It is the randomness in the timing of the effects and the strength of
the variation that hampers investigation of seasonal data. Many methods have been
developed to cope with the problem and these fall into one of two categories: some
methods have been suggested which remove, or filter out, the seasonal effect from the data
before analysis while others are designed to deal jointly with the analysis and seasonality
at the modelling stage. The most well known from the former category is the classical
decomposition of time series using centre weighted moving averages.
7
UNSW, July 2000 Draft, Decomposition of Time Series
Figure 1.1: Smoothing a Growth Curve
Consider that a time series, y
t
, can be written as the sum of three components: trend (m
t
),
seasonal (s
t
), and irregular (r
t
)
y
t
= m
t
+ s
t
+ r
t
(1.2)
or, in multiplicative fashion:
y
t
= m
t
x s
t
x r
t
(1.3)
Clearly, a logarithmic transformation of (1.3) can be written in the form of (1.2) and the
choice of (1.2) or (1.3) depends on whether the seasonal component is constant over time
or is amplified by the trend. In many cases where there is a strong trend, (1.3) will be
appropriate, but there are cases when neither (1.2) nor (1.3) are adequate.
In order to isolate the seasonal component, some estimate of the trend is required.
A simple method of estimating the underlying trend is given by locally averaging the data
in a (centre-weighted) moving average as discussed earlier.
Specifically, consider that there are 2n + 1 periods (i.e. an odd number) in a year.
The averaging operator
8
Ronald Bewley, Time Series Forecasting
(1.1.4)
m
t
1
(2n 1)
n
i
n
y
t i
includes exactly one occurrence of each period within a year and so, m
t
can be considered
nonseasonal. If the number of periods in a year is even, the procedure is slightly more
complicated. The problem arises because the ‘centre-weighting’ principle would leave an
estimate of the trend corresponding to t+½ which is not meaningful with discrete data. In
such cases, the successive values of the trend are themselves averaged as follows. Let
there be 2n periods (i.e. an even number) in a year and define
and
(1.1.5)
m
(1)
t
1
2n
n
i
n 1
y
t i
with
(1.1.6)
m
(2)
t
1
2n
n 1
i
n
y
t i
Given that the trend can be isolated, the seasonal plus irregular component can be
(1.1.7)
m
t
(1/2) [m
(1)
t
m
(2)
t
]
extracted as
s
t
+ r
t
= y
t
- m
t
(1.1.8)
or
s
t
x r
t
= y
t
/m
t
(1.1.9)
Since r
t
is assumed to be noise, the seasonal component is found by averaging
either (1.1.8) or (1.1.9) for all observations corresponding to the same period in each year.
The steps of the calculations are given in Table 1.3 for Australian Retail Sales in
constant 1984/5 dollars. The second column displays the unadjusted quarterly data and the
third column presents the sum of four consecutive observations of the y
t
data (which is a
multiple of m
t
(1)
given by equation (1.1.5). The fourth column contains the sum of two
adjacent terms of column (3) while the fifth column contains the moving average trend,
9
UNSW, July 2000 Draft, Decomposition of Time Series
m
t
. In column (6), the unadjusted data are divided by the trend to produce a ‘raw’ estimate
of the seasonal times the irregular component as in equation (1.1.9).
Table 1.3: Seasonal Adjustment of Retail Sales Data
Date
y
t
Sum(4)
Sum(2)
m
t
(y
t
/m
t
)
s
t
(y
t
/s
t
)
ABS
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
82-II
13423
0.96
13928
13773
82-III
13129
0.97
13598
13599
82-IV
15399
54915
109540
13693
1.12
1.13
13631
13621
83-I
12964
54625
109394
13674
0.95
0.94
13782
13898
83-II
13134
54768
109734
13717
0.96
0.96
13627
13518
83-III
13272
54966
109985
13748
0.97
0.97
13746
13725
83-IV
15596
55020
110315
13789
1.13
1.13
13805
13793
84-I
13018
55295
110623
13828
0.94
0.94
13839
13742
84-II
13409
55328
110933
13867
0.97
0.96
13913
13824
84-III
13304
55605
111559
13945
0.95
0.97
13780
13921
84-IV
15874
55954
112497
14062
1.13
1.13
14051
14088
85-I
13367
56543
113827
14228
0.94
0.94
14210
14254
85-II
13999
57284
115345
14418
0.97
0.96
14525
14455
85-III
14045
58061
116353
14544
0.97
0.97
14547
14596
85-IV
16650
58292
116769
14596
1.14
1.13
14738
14706
86-I
13598
58477
117037
14630
0.93
0.94
14456
14589
86-II
14183
58560
116851
14606
0.97
0.96
14716
14617
86-III
14129
58291
116496
14562
0.97
0.97
14634
14633
86-IV
16381
58205
116249
14531
1.13
1.13
14500
14479
87-I
13513
58044
116191
14524
0.93
0.94
14365
14416
87-II
14022
58147
116651
14581
0.96
0.96
14549
14508
87-III
14232
58504
117499
14687
0.97
0.97
14741
14761
87-IV
16737
58995
118134
14767
1.13
1.13
14815
14757
88-I
14005
59139
118250
14781
0.95
0.94
14888
14757
88-II
14166
59111
118380
14797
0.96
0.96
14698
14659
88-III
14204
59269
118782
14848
0.96
0.97
14712
14668
88-IV
16895
59513
119579
14947
1.13
1.13
14955
14910
89-I
14248
60067
120785
15098
0.94
0.94
15147
15216
89-II
14720
60719
121904
15238
0.97
0.96
15273
15196
89-III
14856
61185
122707
15338
0.97
0.97
15387
15397
89-IV
17362
61522
123198
15400
1.13
1.13
15368
15478
90-I
14585
61676
123295
15412
0.95
0.94
15505
15413
90-II
14874
61619
122990
15374
0.97
0.96
15433
15393
90-III
14798
61372
122443
15305
0.97
0.97
15328
15456
90-IV
17115
61071
121826
15228
1.12
1.13
15149
15209
91-I
14285
60755
121622
15203
0.94
0.94
15186
15211
91-II
14557
60867
121937
15242
0.96
0.96
15105
15048
91-III
14910
61070
122610
15326
0.97
0.97
15444
15474
91-IV
17318
61540
1.13
15329
15356
92-I
14755
0.94
15685
15531
The next step is to average certain elements in column (6) and this is facilitated by
10
Ronald Bewley, Time Series Forecasting
organising the data as in Table 1.4. That is, the estimates in column (6) of Table 1.3 are
arranged by quarter and the columns of Table 1.4 are averaged to produce a unique
seasonal multiplier for each quarter. These four estimates are then repeated in column (7)
which, when divided into column (2) produces the seasonally adjusted series in column
(8). The Australian Bureau of Statistics seasonally adjusted data are presented in the final
column of Table 1.3 for comparison. An additive seasonal model would differ from that
described only in that the divisions in columns (6) and (8) become subtractions.
It can be computed from Table 1.4 that the average of the four seasonal ratios is
very close to one, as is desirable. If it transpires that the mean is not one (or zero for the
additive model), it is important to adjust the four estimates so that the mean is one.
Otherwise, there will be a bias in the level of the adjusted series.
Table 1.4: Forming the Seasonal Ratios
Year
Quarter
I
II
III
IV
1982
1.125
1983
0.948
0.957
0.965
1.131
1984
0.941
0.967
0.954
1.129
1985
0.939
0.971
0.966
1.141
1986
0.930
0.971
0.970
1.127
1987
0.930
0.962
0.969
1.133
1988
0.947
0.957
0.957
1.130
1989
0.944
0.966
0.969
1.127
1990
0.946
0.967
0.967
1.124
1991
0.940 0.955
0.973
Average
0.941
0.964
0.965
1.130
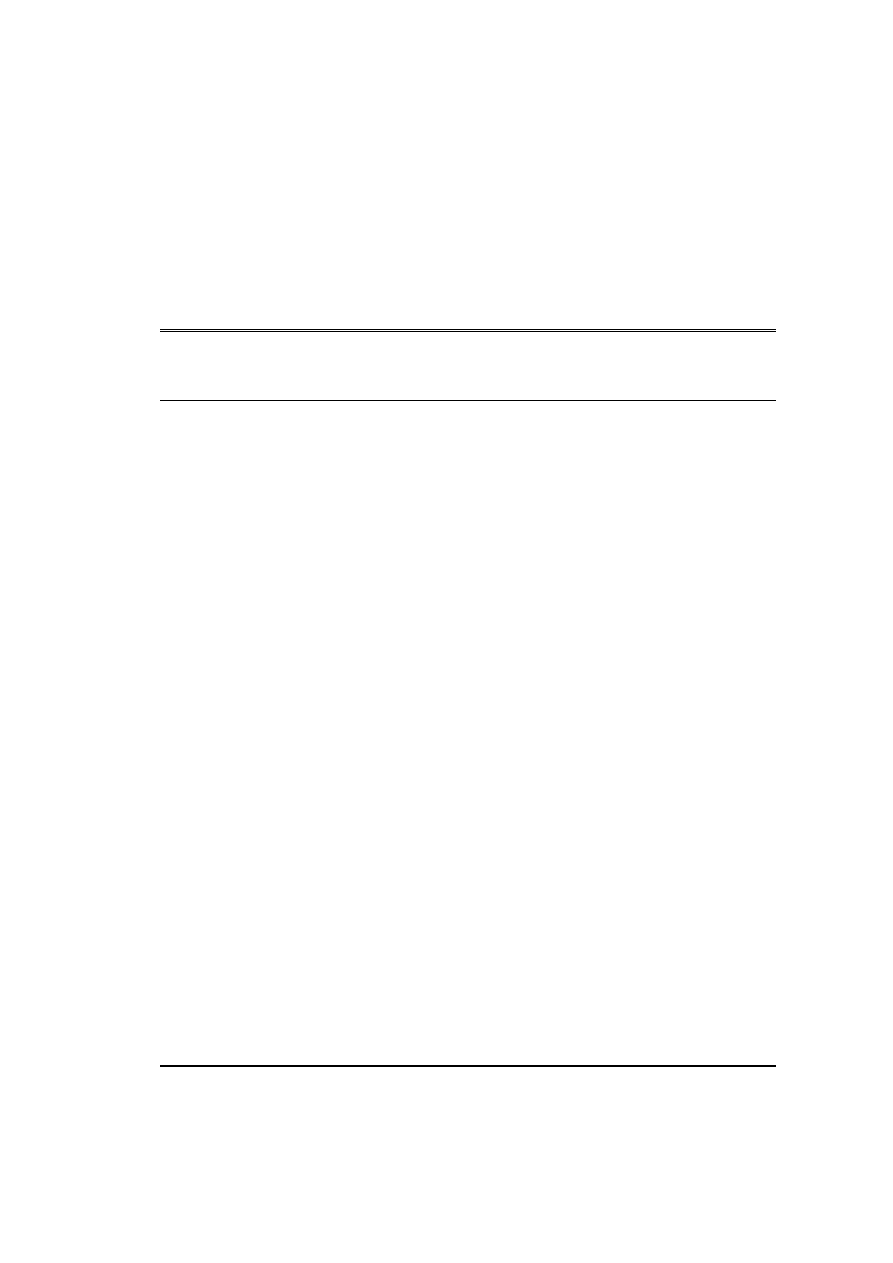
The impact of the seasonal adjustment procedure can be judged in the following
graphical analysis. In Figure 1.2(a), the marked seasonal pattern in retail sales makes it
extremely difficult to judge whether a quarter-to-quarter change is due only to seasonal
11
UNSW, July 2000 Draft, Decomposition of Time Series
effects or if it is of more substance. The adjusted data in the Figure, having separated out
the seasonal effects, makes it simpler to notice changes in trend values. In the companion
Figure 1.2(b), the series as seasonally adjusted by the Australian Bureau of Statistics is
compared to that derived in Table 1.3.
Figure 1.2: Seasonal Adjustment of Retail Sales
1.2(a) Adjusted and Unadjusted Data
1.2(b) Alternative Procedures
It can be noted from Figure 1.2(b) that the additional gains from employing the
more complicated ABS procedures are not great. However, it should be emphasised that, if
quarter-to-quarter changes are under consideration, the differences between the two
methods would be magnified.
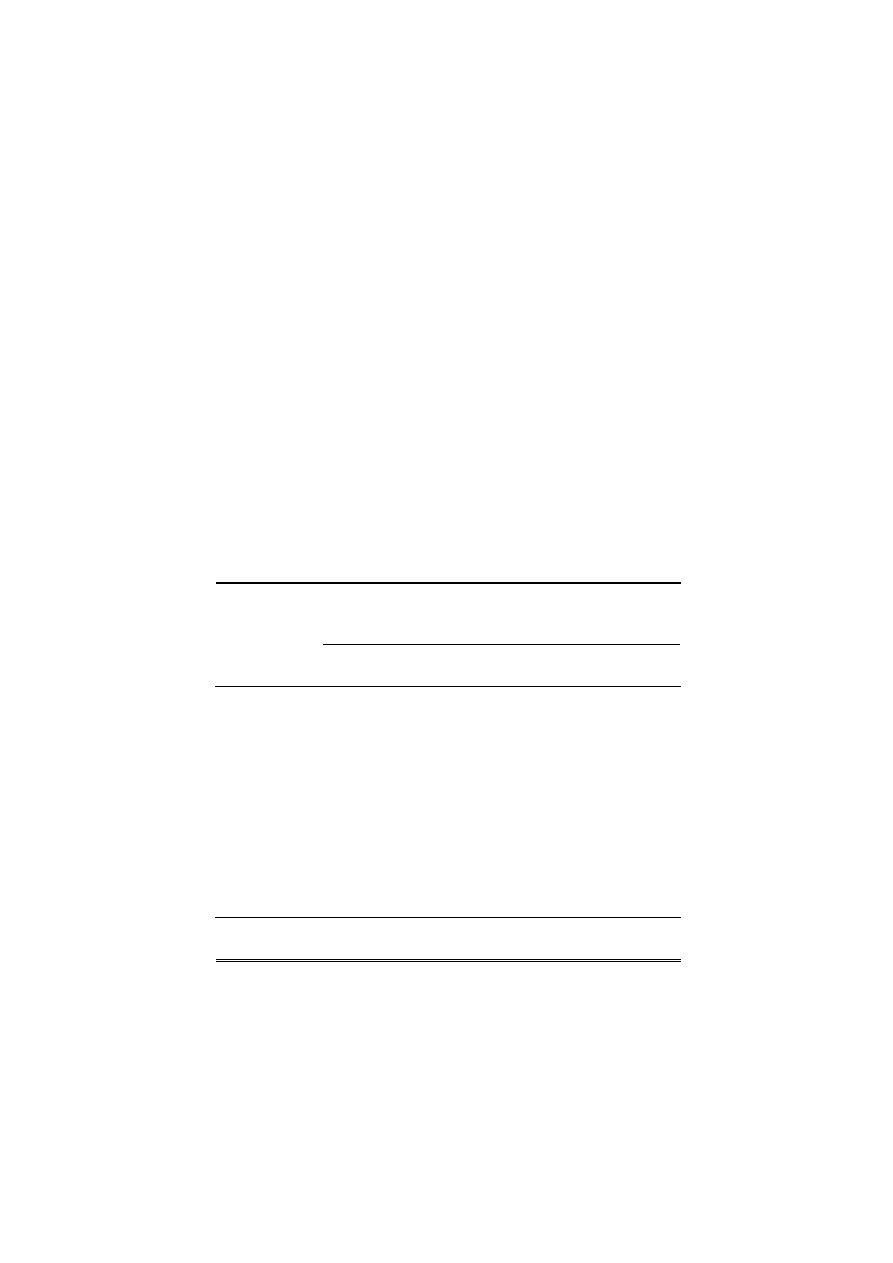
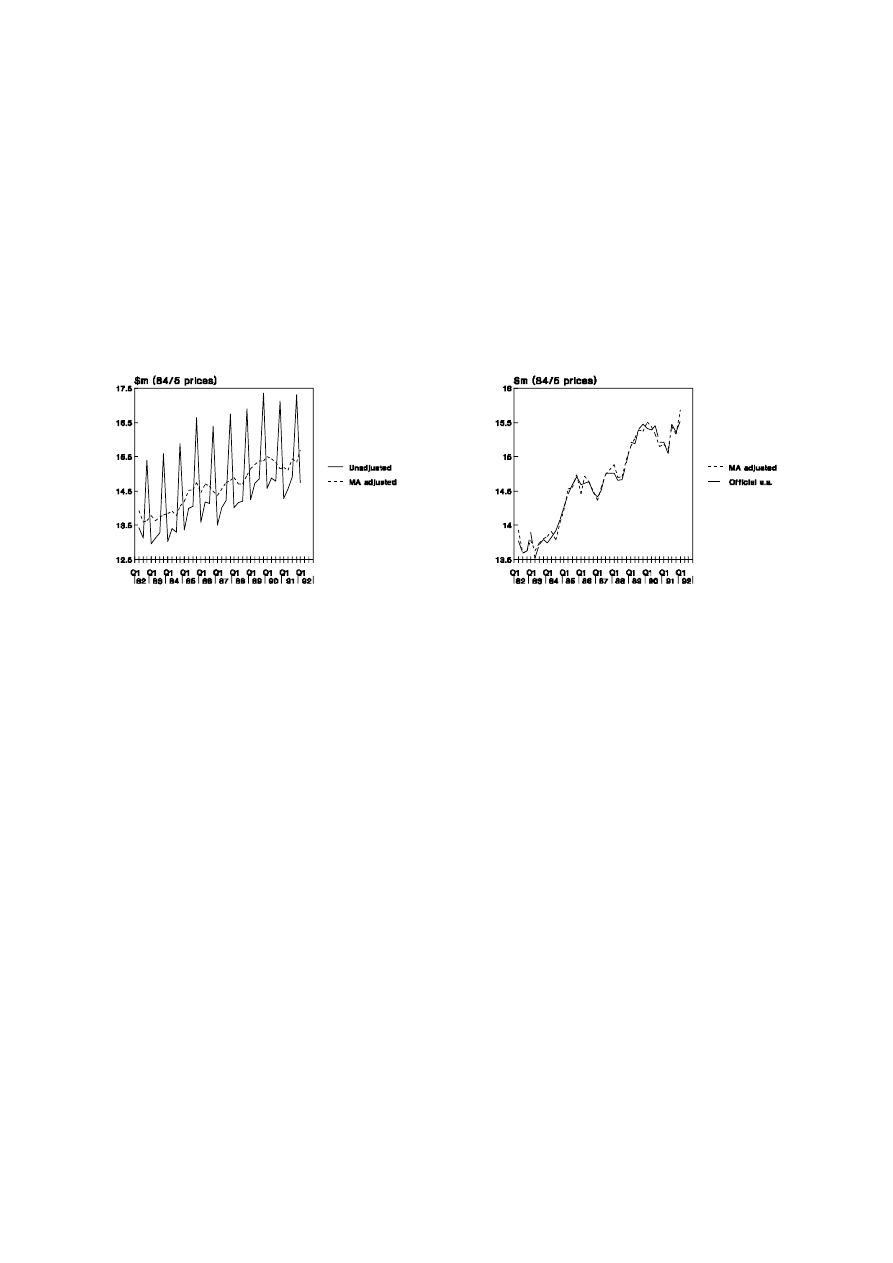
Since the adjusted series contains the irregular component, it is necessarily more
volatile than the trend series, m
t
, as shown in Figure 1.2(a). In some sense, the trend series
gives a clearer picture of longer-term swings in the data but it should be noted that, in the
case of quarterly data, there are no trend estimates for the first and last two quarters.
A fundamental assumption of the seasonal adjustment procedure is that the
seasonal effect is constant over time. By comparing the series of seasonal and irregular
component [column (6), Table 1.3] with the average effects [column (7), Table 1.3], it can
be noted that the assumption is reasonably valid. If, however, the amplitude of the raw
seasonal coefficients had been increasing or decreasing, assumptions other than that of
multiplicative effects would need to have been considered.
12
Ronald Bewley, Time Series Forecasting
Figure 1.3: Validity of Adjustment Procedure
1.3(a) Seasonally Adjusted Data and
3(b) Regularity of Seasonal Component
Moving Average Trends
1.2 Smoothing Methods
Exponential smoothing, Holt’s method and Winters’ Method, collectively known as
smoothing methods originated as simple, automatic forecasting techniques. They are
automatic in the sense that coefficients are often imposed rather than estimated, forecasts
are typically updated without re-estimation, and only limited amounts of data need to be
stored. However, there is no reason why the parameters are not estimated. Despite the
apparent simplicity of these methods and the availability of more sophisticated techniques,
smoothing methods remain popular in the business forecasting environment.
It will be shown that Holt’s method is a generalisation of exponential smoothing
that allows for a trend in the forecasts and Winter’s method is a further generalisation
which accommodates an evolving seasonal pattern.
1.2.1 Averages
Assume that there is no trend nor seasonality in a data series and that y
t
is
completely random and normally distributed as N(0,
σ
2
). The optimal model is, therefore,
y
t
= µ +
ε
t
(1.2.1)
E(
ε
t
) = 0 ; E(
ε
2
t
) =
σ
2
; E(
ε
t
ε
s
) = 0 if s
≠
t, hence the mean of y
t
is µ and there is a zero
correlation between successive values of y
t
. To estimate (1.2.1), consider a formal least
squares solution. Let
13
UNSW, July 2000 Draft, Decomposition of Time Series
where e
t
is the regression residual
S
T
t 1
e
2
t
e
t
= y
t
- m
and m is the estimate of µ. In least squares, S is minimised with respect to m and it can
easily be shown that
That is, the mean is the best forecast for all future time.
m
T
t 1
y
t
/T
yˆ
T
(k) = m
where k is the lead time of the forecast and T is the forecast origin. That is, yˆ
T
(k) is the
forecast of y
T+k
made at time t.
As new data becomes available: y
T+1
, ... ,y
T+n
, forecast errors can be defined:
e
T
(1) = y
T+1
- yˆ
T
(1)
(one-step forecast error)
e
T
(2) = y
T+2
- yˆ
T
(2)
(two-step forecast error)
.
.
.
e
T
(k) = y
T+k
- yˆ
T
(k)
(k-step forecast error)
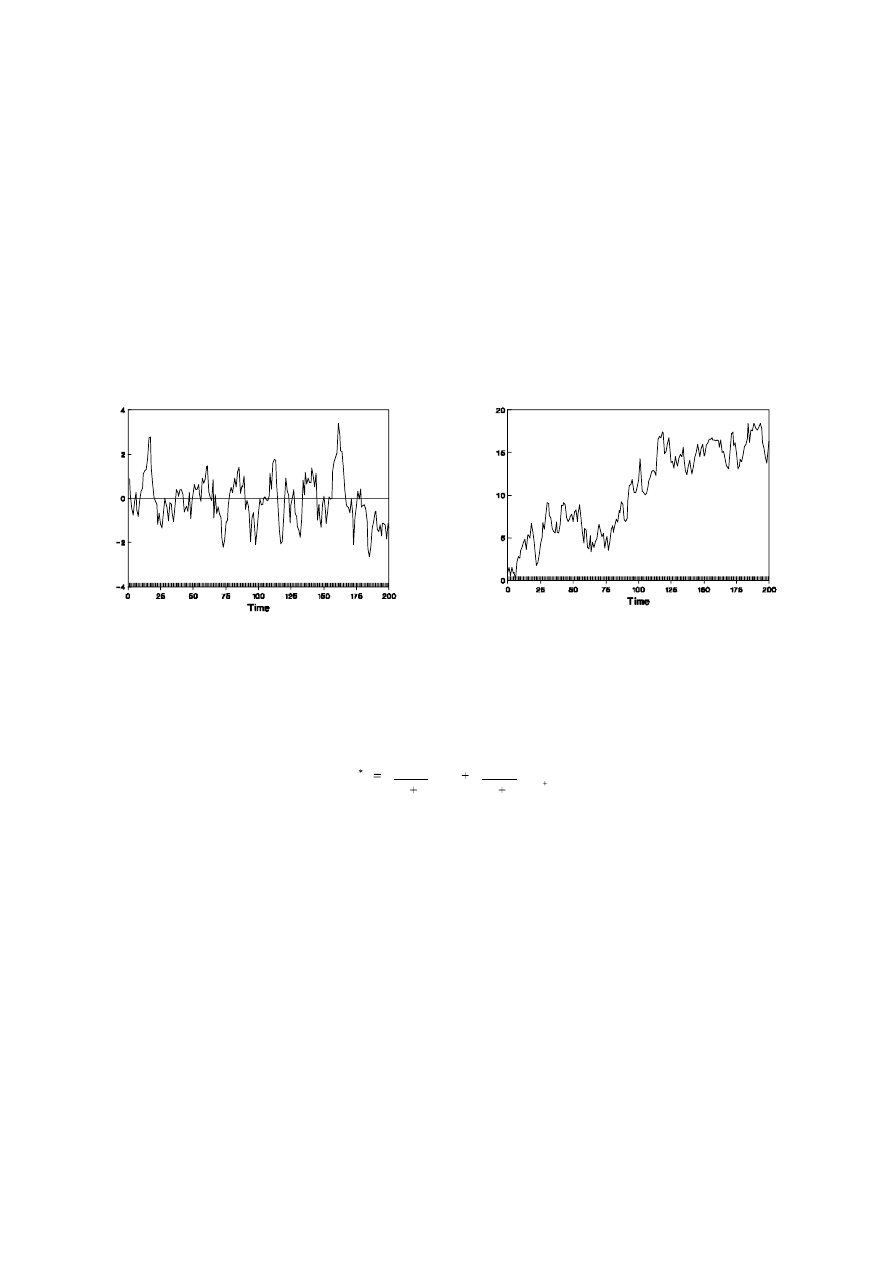
1.2.2 Shifting Mean
Often in business and economics, it can be noted that a time series tends to shift,
or ‘float’, over time so that different sections of the series appear to have different levels
or means. In such cases it does not make sense to define the mean to be fixed over time
and so more emphasis might be placed on recent data when forecasting. This distinction
between series which frequently cross the mean [Figure 1.4(a)], that is exhibit mean
reversion and those that tend evolve over time [Figure 1.4(b)] is important for time series
analysis and will be defined more rigorously in subsequent chapters.
The simplest solution when dealing with series that evolve as in Figure 1.4(b) is to
average only the last T observations [in an MA(T) process] but this is usually
unsatisfactory for forecasting purposes. Unequal weights, such as given in
14
Ronald Bewley, Time Series Forecasting
m
t
= 0.4 y
t
+ 0.3 y
t-1
+ 0.2 y
t-2
+ 0.1 y
t-3
partially address this issue but these weights are somewhat arbitrary. One particular, and
extremely popular, variant of the unequal weight case is given by exponential smoothing
to be introduced later in this chapter. First, however, consider how an MA(T) process is
updated as new data becomes available.
Figure 1.4: Existence of Means
1.4(a) Mean Reversion
1.4(b) Shifting Mean
If the mean is assumed constant, but its estimate, m, is updated as new data
becomes available, the estimate with T observations, m
*
is linked to the old mean
[Appendix 1A] by
It follows from equation (1.2.2) that new data, y
T+1
, has decreasing importance
(1.2.2)
m
T
T 1
m
1
T 1
y
T 1
since (T+1)
-1
→
0 as T
→ ∞
. It can also be noted that it is only necessary to store two
numbers, m and T, not the whole data set, in order to update the mean when y
T+1
is
released.
If the above relationship is adapted for the T-period moving average situation, that
is one observation is dropped from the earliest period when the new data point is added, it
is shown in Appendix 1B that
15
UNSW, July 2000 Draft, Decomposition of Time Series
and it follows that T observations need to be stored if the process is to be updated.
m
m
(1/T) y
T 1
(1/T) y
1
1.2.3 Discounted Least Squares
Instead of considering minimising the residual sum of squares
as is done in standard regression analysis, consider a discounted least squares approach
S
T
t 1
e
2
t
T 1
i 0
y
T i
m
2
where
λ
is a fixed constant between zero and one. What was a constant, m, in standard
S
∞
i 0
λ
i
y
T i
m
T
2
regression is no longer a constant but m
T
, which depends on y
1
,...,y
T
. On setting dS
*
/dm
T
= 0, and rearranging, an updating formula can be derived for the discounted least squares
estimate of m using data up to and including time T, m
T
:
m
T+1
=
λ
m
T
+ (1-
λ
)y
T+1
(1.2.3)
That is, the new forecast m
T+1
is a weighted average of the old forecast m
T
and the new
observation y
T+1
. Since the basic model is that of representing the data by its local mean,
the forecast for all future time is m
T+1
until new information arrives.
Clearly
λ ≤
1 for the sum S
*
to be defined. If
λ
= 0, the old mean is ignored
and, m
T
= y
T
. If
λ
= 1, the new observation is ignored and m never changes, regardless of
the new data; m
T
= m
T-1
. Typically,
λ
> 0.
On noting that m
T
is the forecast of y
T+1
, equation (1.2.3) can be rewritten in terms
of the forecasts yˆ
T
(1), etc., and, by defining
λ
= (1-
α
):
yˆ
T
(1) = (1-
α
)yˆF
T-1
(1) +
α
y
T
(1.2.4)
and, after more algebra
yˆ
T
(1) = (1-
α
)
k+1
yˆ
T-k-1
(1) +
α
[y
T
+ (1-
α
)y
T-1
+ (1-
α
)
2
y
T-2
... + (1-
α
)
k
y
T-k
]
which demonstrates that the weights on y
T-i
are geometrically declining. The geometrically
declining pattern, which in the limit, as the time interval between successive observations
16

Ronald Bewley, Time Series Forecasting
approaches zero, is exponential, gives this method its name, Exponentially Weighted
Moving Average (EWMA) or Exponential Smoothing.
On substituting the definition of the one-step forecast error into (1.2.4), it can be
shown that
yˆ
T
(1) = yˆ
T-1
(1) +
α
e
T-1
(1)
(1.2.5)
That is, the EWMA is an error learning process; the old forecast is updated by some
proportion (
α
) of the old forecast error.
In order to make the EWMA operational, it is necessary to provide starting values.
That is, the forecast of the first observation, yˆ
0
(1), and a value for
α
. Since yˆ
0
(1) is a local
mean, this initial value is often taken to be the average of, say, the first three observations.
Note that if one has a lack of confidence about the initial value, a fairly high value
of
α
, say 0.5, can be chosen for, say, the first 20 observations so that new information is
weighted highly, for a ‘settling-in period’. The value of
α
can then be lowered to say 0.2
for forecasting purposes.
It is unusual to estimate
α
, as this defeats the simplicity of the approach, but it is
not uncommon for a grid search to be used to determine the sensitivity of the forecasts to
different values of
α
. For example, five or six different values of
α
are used and that
which produces the best fit over the sample is selected.
The EWMA is suboptimal when there is a linear trend in the data. Indeed, it can
be shown that EWMA forecasts lag behind the actual data with the bias being greater, the
smaller is the value of
α
. Holt’s method corrects for this bias and Winter’s method allows
for both trends and seasonality.
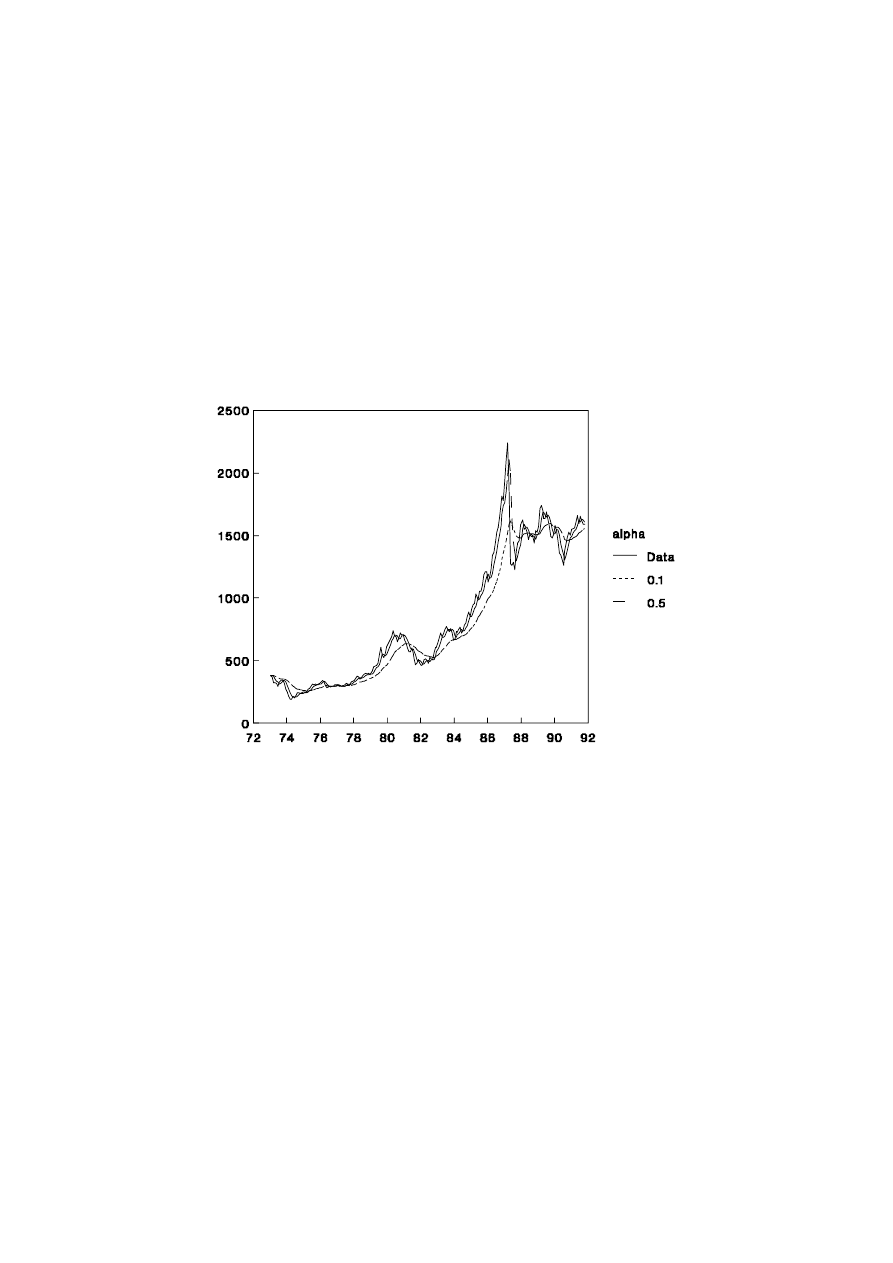
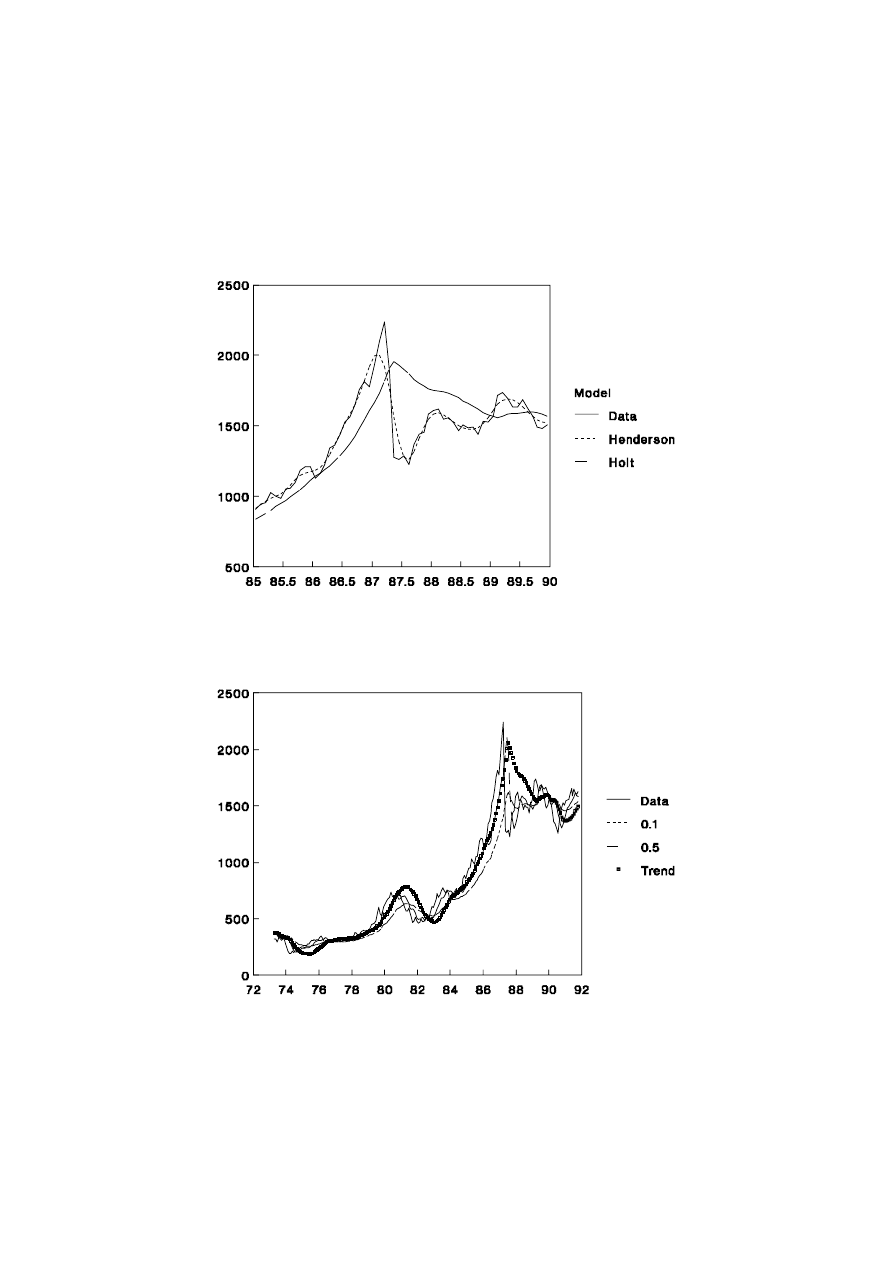
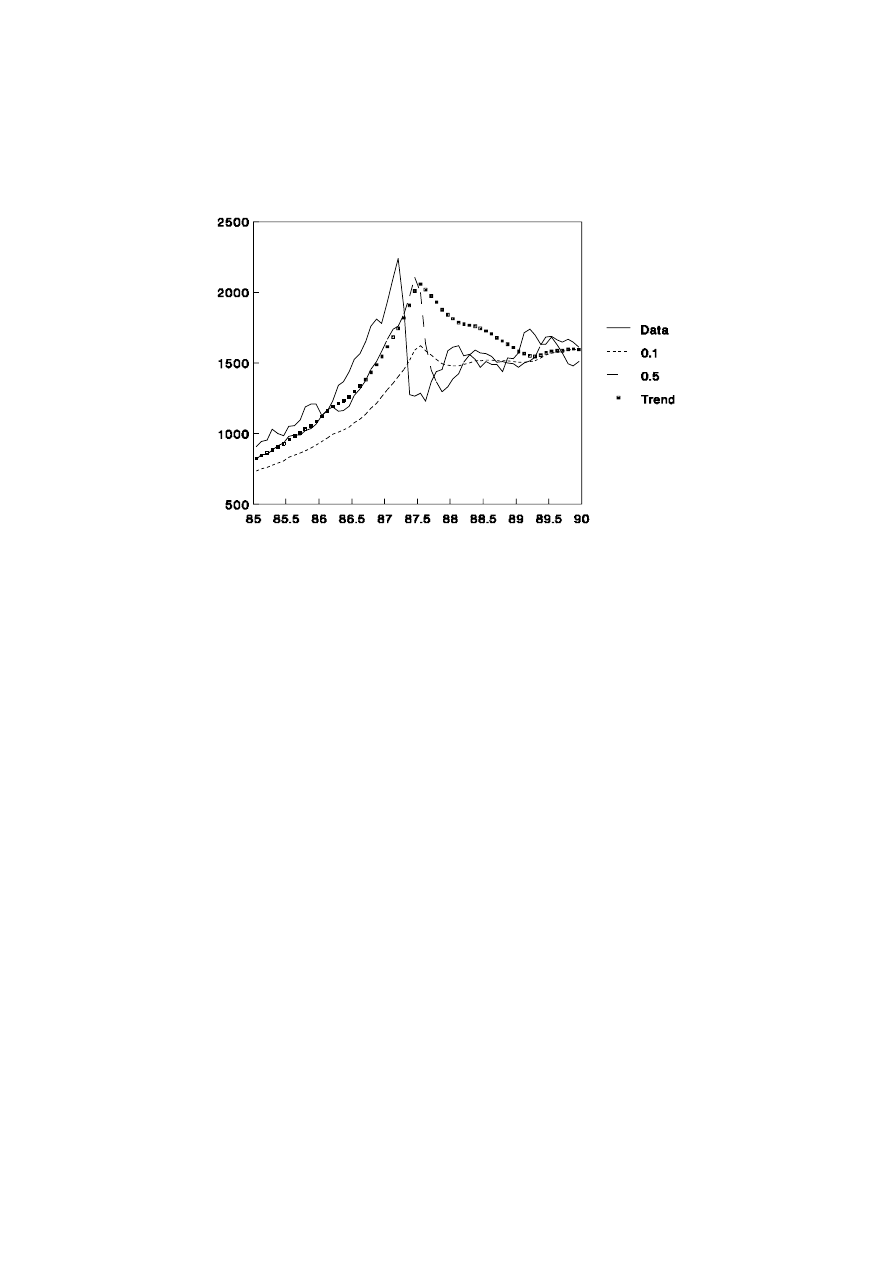
1.2.4 Share Price Index
The EWMA is best suited to series which exhibit the properties of time series such
as the Australian share price index. Monthly data from 1958 (Jan) to 1992 (April) were
used with the microTSP estimation procedure for exponential smoothing. The optimal
estimate for
α
was 0.99 but, in Figure 1.5, the forecasting properties of series with
α
= 0.1
and
α
= 0.5 are compared.
Clearly, when
α
is small, the EWMA forecasts are slow to react to new trends,
such as those exhibited in the late 1980’s boom. On the other hand, the higher levels of
α
17
UNSW, July 2000 Draft, Decomposition of Time Series
imply that the forecasts over-react when an outlier occurs such as in September 1987
before the stock market crash.
The main problem with the EWMA forecast is that the best forecast for all future
time is the same as that for the next period. While this might be optimal for particular
series, the method is not sufficiently general for the many and varied applications of
forecasting techniques.
Figure 1.5: Share Price Index and EWMA Forecasts
1.2.5 Data Generating Process
The exponential smoothing method has a formal regression equation interpretation.
Recall the EWMA (1.2.5)
yˆ
t
(1) = yˆ
t-1
(1) +
α
e
t-1
(1)
(1.2.6)
and the definition of the one step forecast error
e
t-1
(1) = y
t
- yˆ
t-1
(1)
(1.2.7)
Now consider the data generating process
∆
y
t
= a
t
-
θ
a
t-1
(1.2.8)
where a
t
is N(0,
σ
2
) and i.i.d. [an expression which stands for independent and identically
18

Ronald Bewley, Time Series Forecasting
distributed; independent implies successive values of a
t
are not correlated and identical
implies that all a
t
have the same mean, variance and other distributional characteristics].
That is, a
t
has the same properties as the disturbance in a standard regression equation; in
time series analysis the term white noise is usually applied to such an error process.
∆
is
the first-difference operator such that
∆
y
t
= y
t
- y
t-1
. Equation (1.2.8), therefore, states that
the change in y
t
is not totally random unless
θ
= 0, but is related to the ‘shock’ or
disturbance term in the previous period. The forecasts from this model are equivalent to
those from the error-learning EWMA model.
Equation (1.2.8) can be written as
y
t
= y
t-1
+ a
t
-
θ
a
t-1
which, one period later, becomes
y
t+1
= y
t
+ a
t+1
-
θ
a
t
(1.2.9)
In order to produce a forecast from (1.2.9) for period t+1 it is necessary to replace
the right hand side of (1.2.9) by the best forecast of each term using information up to and
including that available at time t. This is known as taking conditional expectations (at time
t) of (1.2.9).
(i)
At time t the ‘best guess’ of a
t+1
is zero since it is, by definition,
unpredictable. Thus, E
t
(a
t+1
) = 0.
(ii)
At time t, a
t
has already occurred and the best guess of this term is the
forecast error e
t
. A more rigorous approach could, indeed, prove that the
disturbances that drive the process are the one-step forecast errors. Thus,
E
t
(a
t
) = e
t-1
(1).
(iii)
At time t, y
t
has occurred and is, therefore, known with certainty. Thus,
E
t
(y
t
) = y
t
.
(iv)
At time t, y
t+1
is unknown and so its conditional expectation is the forecast.
Thus E
t
(y
t+1
) = yˆ
t
(1).
Using the results of (i) - (iv), the conditional expectation of equation (1.2.9) is
yˆ
t
(1) = y
t
-
θ
e
t-1
(1)
(1.2.10)
and, substituting (1.2.7) into (1.2.10),
yˆ
t
(1) = yˆ
t-1
(1) +
α
e
t-1
(1)
(1.2.11)
where
α
= (1-
θ
). Clearly, equation (11) is of the same form as the EWMA in equation
19

UNSW, July 2000 Draft, Decomposition of Time Series
(1.2.6).
The right hand side of (1.2.8), a
t
-
θ
a
t-1
, is known as an MA (moving average)
process (of order 1) but it should be noted that the ‘weights’ do not sum to one as they
must in the similarly named MA smoothing methods.
Although the MA process given in equation (1.2.7) has no direct, intuitive
interpretation, the fact that it produces forecasts that are identically equal to an error
learning process motivates its use in business forecasting.
1.2.6 Holt’s Method
Holt’s method assumes that the data can be best summarised as having a local
mean, m
T
, as with the EWMA model, and a local (linear) trend,
τ
T
. Thus the forecasts
made at time T can be expressed as
yˆ
T
(k) = m
T
+ k
τ
T
(1.2.12)
Because of the importance of the trend in longer term forecasts, together with the
sensitivity of the estimate,
τ
T
is usual smoothed with a much smaller smoothing constant,
β
:
m
T
=
α
y
T
+ (1-
α
) (m
T-1
+
τ
T-1
)
(1.2.13)
τ
T
=
β
(m
T
- m
T-1
) + (1-
β
)
τ
T-1
(1.2.14)
It follows from (1.2.12) that the best forecast of y
T
is (m
T-1
+
τ
T-1
) so that the new
local level in (1.2.13) is a weighted average of the two, as in the EWMA model. The most
recent estimate of the trend is (m
T
- m
T-1
) so that the new estimate,
τ
T
, is a (differently)
weighted average of the two.
Holt’s method can also be written in terms of the forecast error
m
T
= (m
T-1
+
τ
T-1
) +
α
e
T
(1.2.15)
τ
T
=
τ
T-1
+
αβ
e
T
(1.2.16)
Since both
α
and
β
are between zero and one, the weight given to updating the trend is
less than that given to the level.
1.2.7 Winter’s Method and Seasonality
Further modifications can be made to the EWMA model to allow for seasonality in
either additive or multiplicative form. Winter’s method, described in Appendix 1C, allows
20

Ronald Bewley, Time Series Forecasting
for evolving seasonal patterns but its use in practice is somewhat limited and will not be
pursued here. A simpler, pragmatic approach when dealing with seasonal data is to first
use the seasonal adjustment procedure of Section 1.1 and then use the EWMA or Holt’s
method to make seasonally adjusted forecasts. If it is desired that the forecasts should
exhibit the same seasonal pattern as the data, the seasonal factors can be multiplied or
added to the forecasts
1.2.8 Henderson’s Trend Method
Many time series published by the Australian Bureau of Statistics are also
published in trend form. The method of deriving the trend is no more than a simple
moving average method with two modifications over that presented in Section 1.1. The
weights are derived from a more complicated process and these weights are published in
ABS Cat No. 1316.0, Estimates of “Trend”. Secondly, one-sided moving averages are used
for more recent data.
In each case, the ‘Henderson’ method requires the data to be first seasonally
adjusted, then, depending on the number of observations per year, a certain table of
weights is employed. In the case of quarterly data, all but the first and last 3 observations
are smoothed by the symmetric filter
m
t
= -0.059 y
t-3
+ 0.059 y
t-2
+ 0.294 y
t-1
+ 0.412 y
t
+ 0.294 y
t+1
+ 0.059 y
t+2
- 0.059 y
t+3
The last three observations are smoothed by
m
T-2
= -0.053 y
T-5
+ 0.058 y
T-4
+ 0.287 y
T-3
+ 0.399 y
T-2
+ 0.275 y
T-1
+ 0.034 y
T
m
T-1
= -0.054 y
T-4
+ 0.061 y
T-3
+ 0.294 y
T-2
+ 0.410 y
T-1
+ 0.289 y
T
m
T
= -0.034 y
T-3
+ 0.116 y
T-2
+ 0.383 y
T-1
+ 0.535 y
T
The ABS uses a 13-term moving average for monthly data and these weights are given in
Appendix 1D.
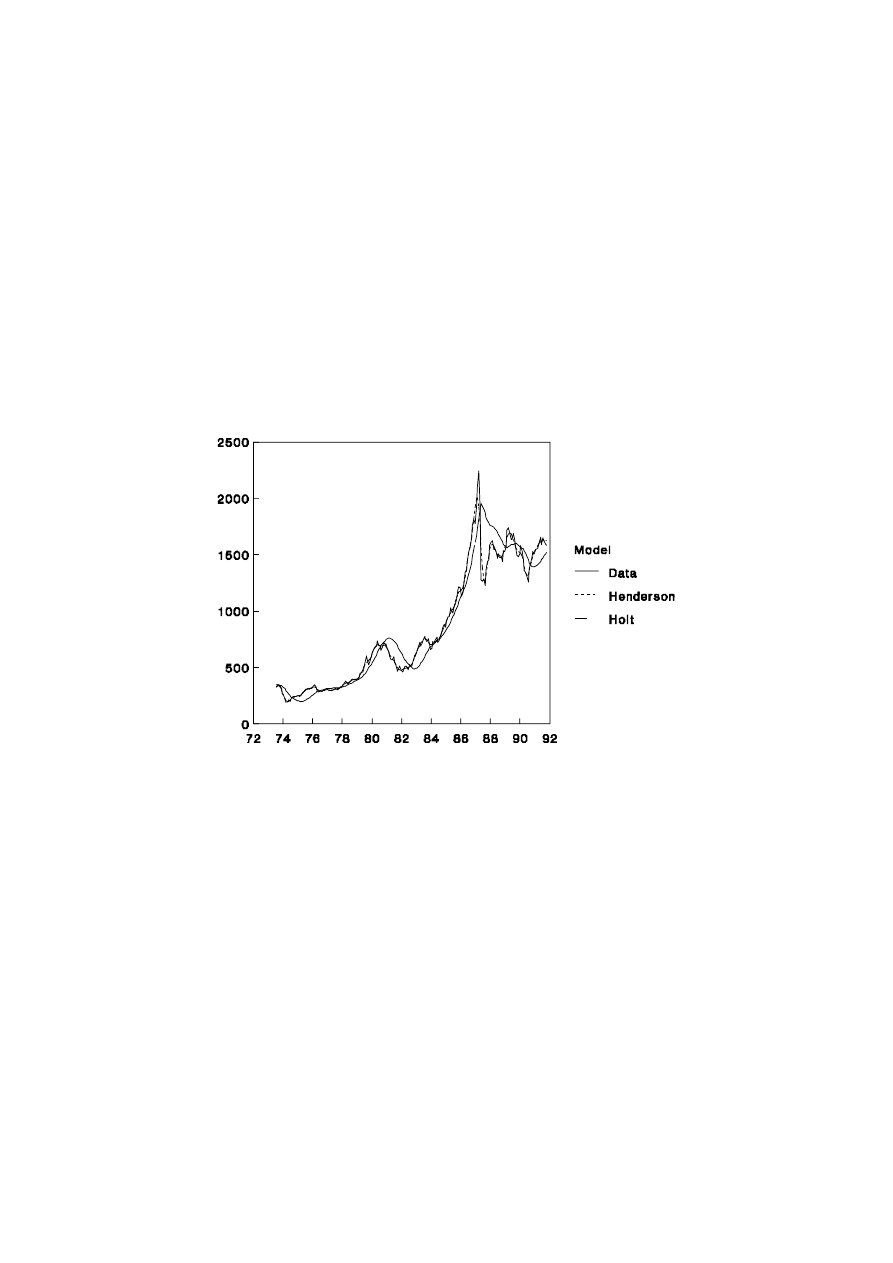
1.2.9 Share Price Index Revisited
In order to highlight some of the strengths and weaknesses of the trend methods,
the share price data examined in section 1.2.5 has been subjected to Henderson’s 13 point
21
UNSW, July 2000 Draft, Decomposition of Time Series
moving average and Holt’s trend method with
α
= 0.1 and
β
= 0.1. It can be noted from
Figure 1.6 that Henderson’s method works well as a smoothing device over the range of
problems reflected in the share price data: changing trends, extreme values and changing
volatility. Holt’s method works much better than the EWMA with
α
= 0.1 during the
increasing trend of the 1980s shown in Figure 1.5 but it over-reacts after the share market
crisis of October 1987. These effects can be seen more clearly in Figure 1.7 which focuses
on the late 1980s.
Figure 1.6: Share Price Index and Trend Methods
In some sense, the comparison of the Henderson and Holt’s model, or indeed with
the EWMA models, should be qualified. Henderson’s method is not a forecasting tool but
the other methods have been presented as one-step forecasts. Thus, if Holt’s method is to
be used just as a smoothing model, the forecast yˆ
t
(1) should be replaced by m
t
. On the
other hand, if longer period forecasting is under consideration, even greater difference
between the EWMA and Holt’s method can be noted. Three month ahead forecasts are
presented in Figures 1.8 and 1.9. Clearly, Holt’s model is inappropriate for share price
data and it is difficult to improve on an EWMA with a very large
α
, that is a model
which uses the current observation as the best forecast for all future time. If this were not
the case, investors would predict the future and alter the price of the shares accordingly.
22
Ronald Bewley, Time Series Forecasting
Such models are considered in greater detail in the more formal time series section of
these notes.
Figure 1.7: Performance of Trend Models During the 1980s
Figure 1.8: Three Month Forecasts of the Share Price Index
23
UNSW, July 2000 Draft, Decomposition of Time Series
Figure 1.9: Three Month Forecasts in the 1980s
24
Ronald Bewley, Time Series Forecasting
Appendix 1A: Updating of the Mean
If the mean of y
t
, m, is assumed constant, but its estimate, m
*
, is updated as new
data becomes available, the estimate with T observations
becomes
m
T
t 1
y
t
/T
with an additional observation. Moreover
m
T 1
t 1
y
t
/(T 1)
m
T
t 1
y
t
y
T 1
(T 1)
m
Tm
y
T 1
(T 1)
m
T
T 1
m
1
T 1
y
T 1
25
UNSW, July 2000 Draft, Decomposition of Time Series
Appendix 1B: Updating of Moving Averages
If the derivation from Appendix 1A is adapted for the T-period moving average
situation, that is one observation is dropped from the earliest period when the new data
point is added,
m
T
t 1
y
t
/T
m
T 1
t 2
y
t
/T
m
T
t 1
y
t
y
T 1
y
1
T
m
m
(1/T) y
T 1
(1/T) y
1
26

Ronald Bewley, Time Series Forecasting
Appendix 1C: Winter’s Method
If s is the period of seasonality (e.g. 12 with monthly data), Winter’s method can
be written as
m
T
=
α
(y
T
- F
T-s
) + (1-
α
) (m
T-1
+
τ
T-1
)
τ
T
=
β
(m
T
- m
T-1
) + (1-
β
)
τ
T-1
G
T
=
γ
(y
T
- m
T
) + (1-
γ
) G
T-s
F
T
(k) = (m
T
+ k
τ
T
) + G
T+k-s
for the additive model, where G
T
is the seasonal factor for observation T and
γ
is the
associated smoothing constant which is also between zero and one. G
T+k-s
is replaced by
G
T+k-2s
, etc if k > s.
The multiplicative model is
m
T
=
α
(y
T
/ F
T-s
) + (1-
α
) (m
T-1
+
τ
T-1
)
τ
T
=
β
(m
T
- m
T-1
) + (1-
β
)
τ
T-1
G
T
=
γ
(y
T
/ m
T
) + (1-
γ
) G
T-s
F
T
(k) = (m
T
+ k
τ
T
) G
T+k-s
27

UNSW, July 2000 Draft, Decomposition of Time Series
Appendix 1D: 13-term Henderson Weights
For all but the first and last six observations, the moving average is
m
t
= -0.014 y
t-6
- 0.028 y
t-5
+ 0.066 y
t-3
+ 0.147 y
t-2
+ 0.214 y
t-1
+ 0.240 y
t
+ 0.214 y
t+1
+ 0.147 y
t+2
+ 0.066 y
t+3
- 0.028 y
t+5
- 0.019 y
t+6
The last six terms are:
m
T-5
= -0.017 y
T-11
- 0.025 y
T-10
+ 0.001 y
T-9
+ 0.066 y
T-8
+ 0.147 y
T-7
+ 0.213 y
T-6
+ 0.238 y
T-5
+ 0.212 y
T-4
+ 0.144 y
T-3
+ 0.061 y
T-2
- 0.006 y
T-1
- 0.034 y
T
m
T-4
= -0.011 y
T-10
- 0.022 y
T-9
+ 0.003 y
T-8
+ 0.067 y
T-7
+ 0.145 y
T-6
+ 0.210 y
T-5
+ 0.235 y
T-4
+ 0.205 y
T-3
+ 0.136 y
T-2
+ 0.050 y
T-1
- 0.018 y
T
m
T-3
= -0.009 y
T-9
- 0.022 y
T-8
+ 0.004 y
T-7
+ 0.066 y
T-6
+ 0.145 y
T-5
+ 0.208 y
T-4
+ 0.230 y
T-3
+ 0.201 y
T-2
+ 0.131 y
T-1
+ 0.046 y
T
m
T-2
= -0.016 y
Y-8
- 0.025 y
T-7
+ 0.003 y
T-6
+ 0.068 y
T-5
+ 0.149 y
T-4
+ 0.216 y
T-3
+ 0.241 y
T-2
+ 0.216 y
T-1
+ 0.148 y
T
m
T-1
= -0.043 y
T-7
- 0.043 y
T-6
+ 0.002 y
T-5
+ 0.080 y
T-4
+ 0.174 y
T-3
+ 0.254 y
T-2
+ 0.292 y
T-1
+ 0.279 y
T
m
T
= -0.092 y
T-6
- 0.058 y
T-5
+ 0.012 y
T-4
+ 0.120 y
T-3
+ 0.244 y
T-2
+ 0.353 y
T-1
+ 0.421 y
T
28
Wyszukiwarka
Podobne podstrony:
Time Series Models For Reliability Evaluation Of Power Systems Including Wind Energy
Application Of Multi Agent Games To The Prediction Of Financial Time Series
Decomposition of Ethyl Alcohol Vapour on Aluminas
Knights of Time
Arcana Evolved The Test of Time
clauses of time NT23HZ3QEPYZNINTQV4IVGXBOO7NPTOVAQ372XQ
HMTD Decomposition of multi peroxidic compounds Hexamethylene triperoxide diamine (HMTD)
Title, Elise Till the End of Time (Harlequin HAR 377) (Vietnam)
Frederik Pohl Eschaton 01 The Other End Of Time
prepositions of time
Frederik Pohl The far shore of time
The Crossroads of Time Andre Norton
Aldiss, Brian W The Canopy of Time
Isaac Asimov Of Time and Space and Other Things
41 Pentatonix End of Time
prepositions of time on at and in 2 brb29
Anderson, Kevin J Music Played on the Strings of Time
Until The End Of Time
George Alec Effinger The Nick of Time
więcej podobnych podstron