Systemy operacyjne
– notatki do wykładu
6
2. Procesy i wątki.
2.1 Proces.
Proces -
program (kod binarny) w czasie wykonania; wykonanie przebiega sekwencyjnie (wyjątek:
procesy wielowątkowe – patrz niżej).
Procesy wykonują się współbieżnie (ale niekoniecznie równolegle – podział czasu)
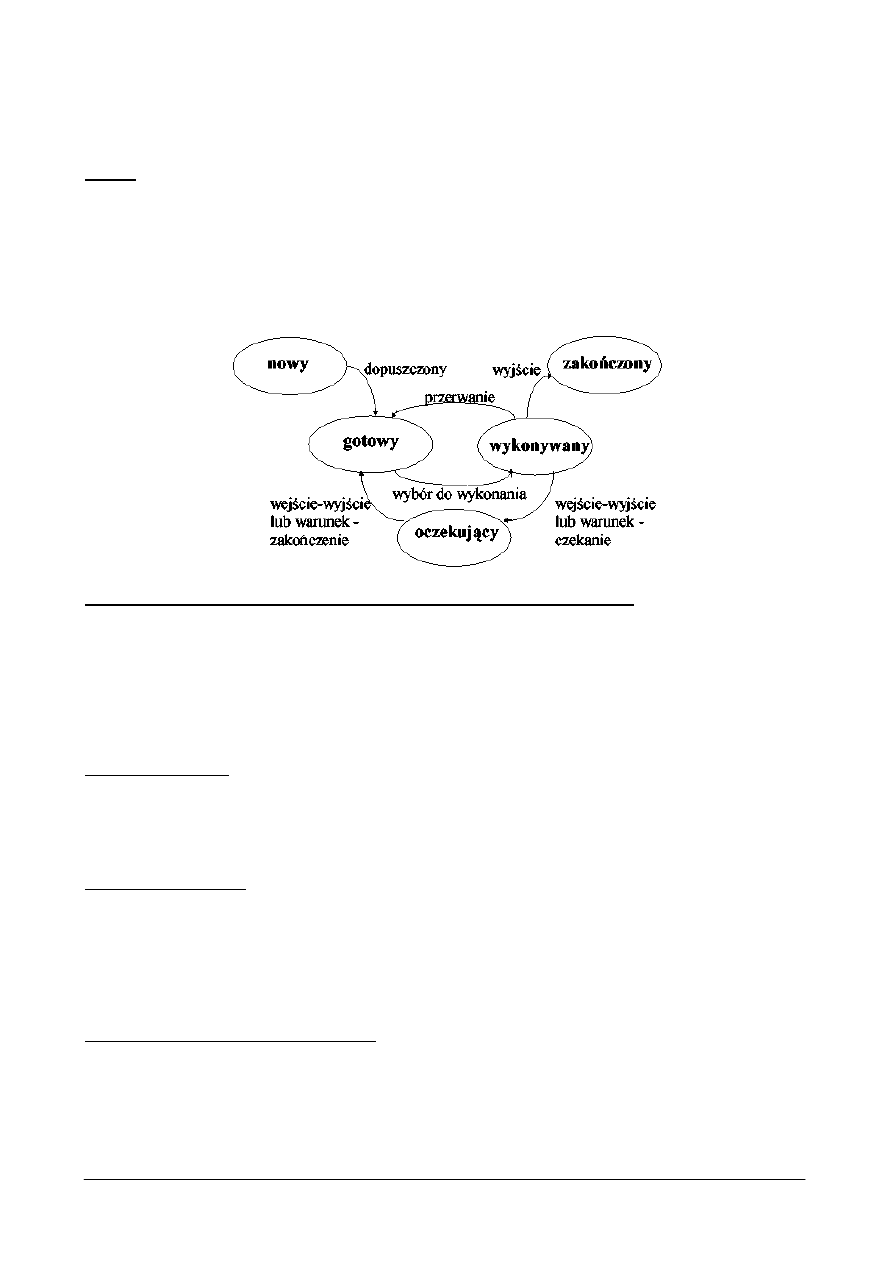
Stany procesu:
-
nowy: proces został utworzony
-
wykonywany: są wykonywane instrukcje procesu
-
oczekujący: proces czeka na wystąpienie zdarzenia
- gotowy: proces czeka na przydzielenie procesora
-
zakończony: proces zakończył wykonanie
Reprezentacja procesu w systemie (zawartość bloku kontrolnego procesu):
- stan procesu
- identyfikator (unikalny numer
– w UNIX’ie – PID)
-
licznik rozkazów
- rejestry procesora
-
wskaźnik do kolejki procesów
-
informacje o pamięci zajętej przez proces
-
wykaz otwartych (używanych plików)
Tworzenie procesu:
-
za pomocą funkcji systemowej (np. fork() w UNIX)
-
proces utworzony przez inny proces (macierzysty, ew. rodzic) nazywamy potomnym.
-
potomek uzyskuje nową pulę zasobów lub korzysta z zasobów rodzica (mniejsze przeciążenie
systemu).
Zakończenie procesu:
-
po ostatniej instrukcji.
-
specjalna funkcją (np. exit() w UNIX)
-
na żądania rodzica ( abort() )
-
niekiedy: zakończenie kaskadowe: po zakończeniu rodzica kończone są procesy potomne.
2.2 Wątek
Wątek sterowania (tzw. lekki proces): sekwencja instrukcji; tradycyjnie proces = jeden wątek
sterowania, jednak czasami (w niektórych systemach) w przestrzeni adresowej procesu dopuszcza
więcej wykonywanych współbieżnie wątków sterowania.
-
wątek ma te same podst. cechy co proces (stany, możliwość tworzenia wątków potomnych,
korzystania z urządzeń zewn. itd...)
-
między wątkami tego samego procesu nie ma ochrony pamięci.
-
analogia: maszyna-procesy == proces-
wątki
Systemy operacyjne
– notatki do wykładu
7
-
elementy wątku i procesu:
Wątek
Proces
licznik rozkazów
przestrzeń adresowa
stos
otwarte pliki, semafory
rejestry procesora
zmienne globalne
lista wątków potomnych
lista proc. potomnych
-
Trady
cyjny proces (ciężki) jest równoważny zadaniu z jednym wątkiem
-
Jeżeli zadanie składa się z wielu wątków, to w czasie gdy jeden wątek jest zablokowany, może
się wykonywać inny wątek tego zadania; współpraca wielu wątków w jednym zadaniu pozwala
zwiększyć przepustowość i poprawić wydajność
-
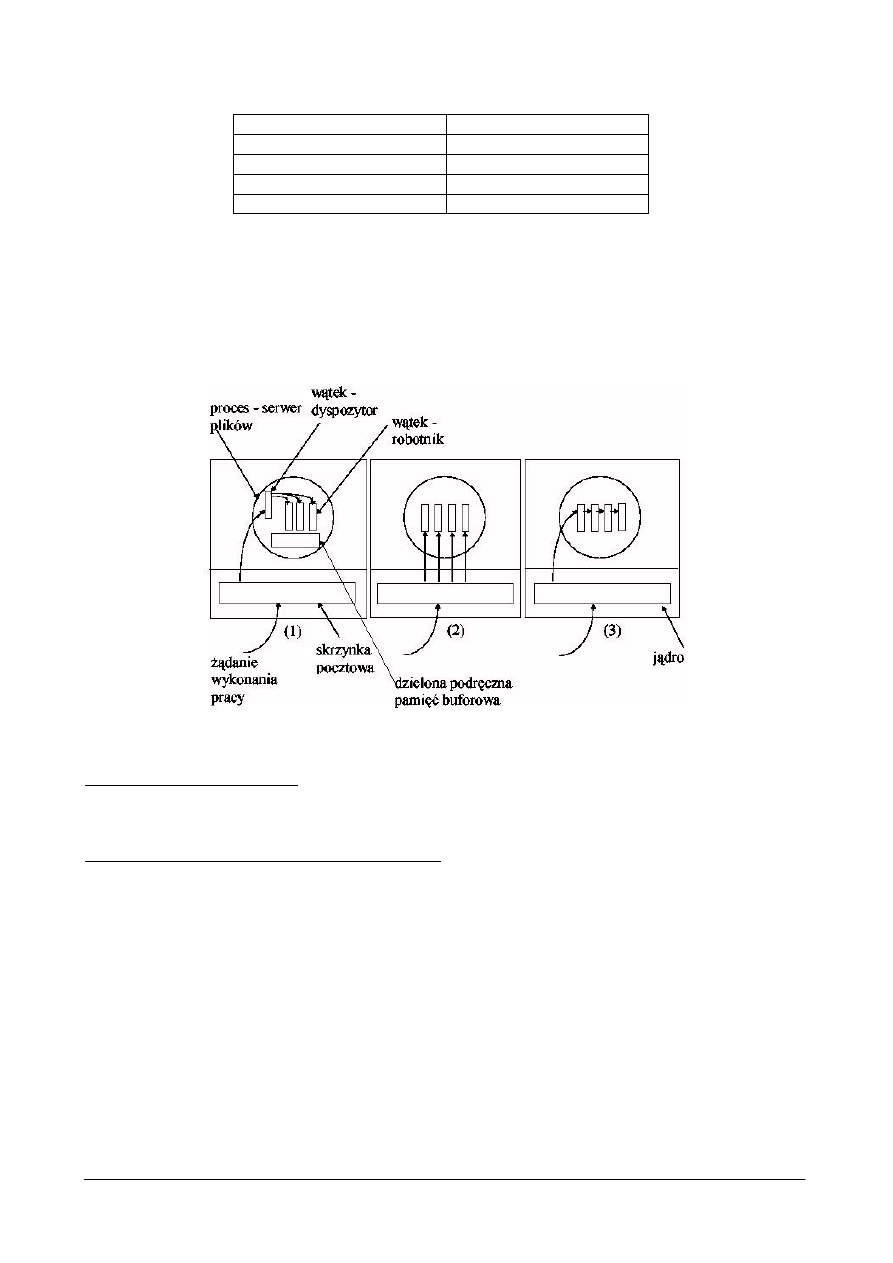
Wątki umożliwiają połączenie równoległości z sekwencyjnym wykonaniem:
(1) model dyspozytor-pracownik
(2) model zespołu
(3) model potoku
Wątki statyczne/dynamiczne:
-
struktura wątków procesu jest ustalona (w kodzie źr. procesu) lub też proces może dowolnie
tworzyć/usuwać swoje wątki
Implementacja wątków w systemie operacyjnym:
Pakiet wątków : zbiór elementarnych działań na wątkach dostępnych w systemie (np. procedur
bibliotecznych.
Implementacja wątków w przestrzeni użytkownika:
-
jądro nie wie o wątkach, widzi tylko jednowątkowe procesy
-
zaleta1: można używać wątków w systemie, który ich nie implementuje (np. pierwotnie UNIX)
-
możliwe szybkie przełączanie wątków – tylko przeładowania wsk. stosu i instrukcji oraz
rejestrów (najszybsze działania w syst. komputerowym).
-
zaleta2:każdy proces może używać własnego alg. planowania dla swoich wątków.
-
problem1: przy blokowanych odwołaniach wątków do systemu – proces nie może oddać
sterowania systemowi, musi czekać na swoje wątki. Używa się kodu sprawdzającego (and.
jacket
) czy odwołania wątków będą blokować. a wątków używa się głownie w zadaniach z
blokującymi odwołaniami, gdzie mają poprawić wydajność...
-
problem2: nie ma wywłaszczania, wątki muszą same oddawać sterowanie procedurze
wykonawczej procesu.
Implementacja wątków w jądrze:
-
system wykonawczy jest częścią jądra
Systemy operacyjne
– notatki do wykładu
8
-
jądro zakłada tablicę wątków dla każdego procesu
-
wszystkie funkcje mogące blokować mają postać odwołań do systemu
-
gdy wątek czka, jądro wybiera następny – wydajność!
-
wada: koszt odwołań do systemu (czas!)
Ogólne problemy (najtrudniejsze do implementacji) z wątkami:
-
obsługa przerwań (sygnałów)
-
niewznawialne procedury systemowe
3. Procesy - zagadnienia planowania
3.1 Planowanie
Planowanie
– przydział procesora gwarantujący jego optymalne wykorzystanie (np. gdy proces
czeka na urządzenie we-wy; sterowanie przechodzi do następnego.
procesy oczekują na przydział procesora w kolejkach (kolejka: lista bloków kontrolnych
procesów)
-
kolejka zadań: procesy nowoutworzone i czekające na pamięć
-
kolejka procesów gotowych: czekających na przydział procesora
-
kolejki urządzeń: procesy oczekujące na przydział urządzenia
za szeregowanie (wybór z kolejek) procesów odpowiada planista (scheduler – proces
systemowy)
-
planista
długoterminowy: wybiera procesy z kolejki zadań (zredukowany w niektórych
systemach); działa co sek/min.
-
planista krótkoterminowy: wybiera z kolejki pr. gotowych; działa co ms.
-
czasem planista odpowiada za wymianę (swapping) czyli czasowe usuwanie zadania w całości
z pamięci głównej do pomocniczej
-
Decyzję podejmuje się gdy proces:
1. przechodzi ze stanu wykonywany do stanu oczekujący
2. przechodzi ze stanu wykonywany do stanu gotowy
3. przechodzi ze stanu oczekujący do stanu gotowy
4. kończy się
Sterowanie do procesu wybranego przez planistę przekazuje dyspozytor (dispatcher):
-
przechowuje stan (kontekst) bieżącego procesu.
-
przełącza kontekst (rejestry, itd...)
-
przełącza system w tryb użytkownika
-
wykonuje skok do adresu z bloku kontrolnego
-
opóźnienie wnoszone przez dyspozytora: 1-100ms (zależne od wsparcia sprzetowego)
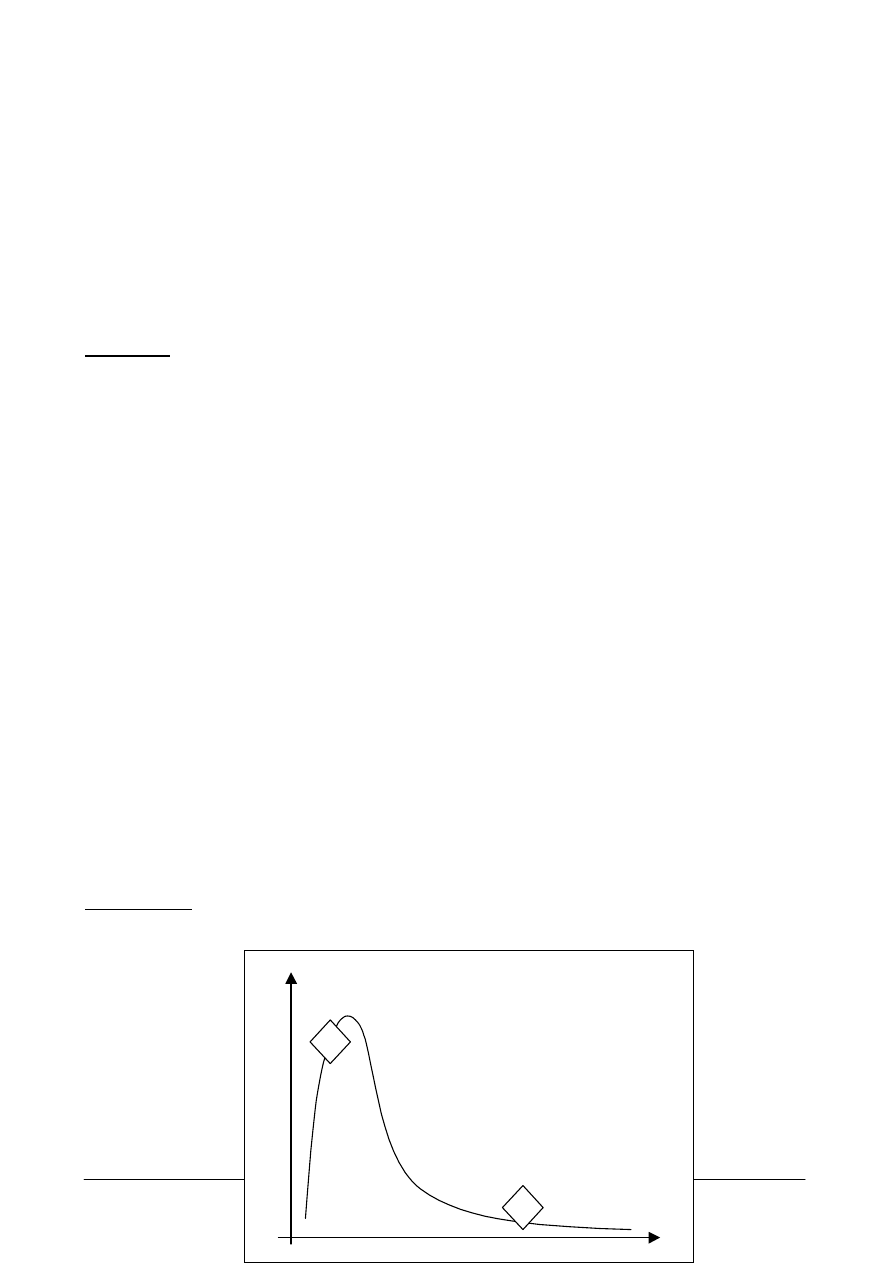
Życie procesu: dwie fazy (cykliczne) : 1. procesora, 2. we-wy (oczekiwania na urządzenie)
-
procesy zorientowane na we-
wy (1): spędzają więcej czasu wykonując operacje we-wy niż
obl
iczenia; wiele krótkich odcinków czasu zapotrzebowania na CPU
D
ł. fazy procesora
Cz
ęstość fazy procesora
1
2
Systemy operacyjne
– notatki do wykładu
9
-
zorientowane na procesor (2): spędzają więcej czasu wykonując obliczenia; kilka bardzo
długich odcinków czasu zapotrzebowania na CPU
Kryteria planowania (różne możliwości - maxymalizacja, minimalizacja):
-
max wykorzystania procesora (najlepiej 40-90%)
-
max przepustowości – liczba procesów kończonych w jedn. czasu)
-
min czasu przetwarzania procesu (od utworzenia do zakończenia)
-
min czasu oczekiwania w kolejkach (to
kryterium będziemy stosować)
-
min czasu odpowiedzi procesu (w syst. interaktywnych)
będziemy minimalizować średni czas oczekiwania w kolejkach
3.2 Algorytmy planowania
FCFS (First Come First Served)
przydział czasu w kolejności zgłaszania się procesów
najprostsza implementacja (kolejka FIFO)
brak wywłaszczania
kłopotliwy w systemach z podziałem czasu
przykład:
-
Procesy i ich zapotrzebowanie na CPU: P1 (24), P2 (3), P3 (3)
-
Jeżeli procesy przybyły w kolejności P1, P2, P3: · czas oczekiwania: P1 = 0, P2 = 24, P3 = 27 ·
średni czas oczekiwania: (0 + 24 + 27)/3 = 17.
-
Jeżeli procesy przybyły w kolejnooeci P2, P3, P1: · czas oczekiwania: P1 = 6, P2 = 0, P3 = 3 ·
średni czas oczekiwania: (6 + 0 + 3)/3 = 3
efekt: krótkie procesy są wstrzymywane przez długie
zalety: sprawiedliwy, niski narzut systemowy
wady: długi oeredni czas oczekiwania i wariancja czasu oczekiwania, nieakceptowalny w
systemach z podziałem czasu
SJF (Shortest Job First)
Algorytm wiąże z każdym procesem długość jego najbliższej fazy procesora. Procesor jest
przydzielany na
jkrótszemu.
Przy równych fazach procesora mamy FCFS
SJF jest optymalny (dowód: umieszczenie krótkiego przed długim bardziej zmniejsza czas
oczekiwania krótkiego niż zwiększa długiego)
SJF może być:
-
niewywłaszczający
-
wywłaszczający (gdy dł. fazy nowego jest krótsza niż to, co zostało aktualnie wykonywanemu
procesowi)
Problem: jak oszacować dł przyszłej fazy procesora?
-
planista długoterminowy może wymagać jego zadeklarowani od procesów (zadania maj ą
predefiniowany czas fazy); krótkoterminowy nie może (wielkie opóźnienia)
-
częste rozwiązania: dł. następnej fazy (t
n+1
)= średnia wykładnicza długości n faz poprzednich
(założenie: dł fazy jest zależna od długości poprzednich faz):
t
n+1
=
i=0
n
a(1-a)
i
t
n-i
gdzie
a<1.
-
powyższe rozwiązania jest adaptacyjne (dostosowuje się gdy zapotrzebowanie procesu ulega
zmianie)
Planowanie Priorytetowe:
szczególnym przypadkiem jest SJF ( w którym priorytet = 1/(dł nast. fazy procesora) ).
zwykle priorytet określa jednak liczba całkowita np. z przedziału [0,7] czy [0,4096] – niższa
wartość = wyższy priorytet.
problem: proces o niskim priorytecie może się nigdy nie wykonać (w jednym z przemysłowych
systemów IBM proces czekał na wykonanie od 1967 do 1973...); rozwiązanie: postarzanie
procesów (zmniejszenie priorytetu o 1 np. co 10 min.)

Systemy operacyjne
– notatki do wykładu
10
może być wywłaszczające (ale niekoniecznie)
określenie priorytetu:
-
zewnętrznie (przez funkcję systemową)
-
wewn. przez deklarację samego procesu (na podstawie np. wymagań: pamięć, procesor etc...)
Planowanie Rotacyjne (Round Robin - RR, pol. karuzelowe)
ustala się kwant czasu (~10-100 ms)
kolejka procesów jest traktowana jak cykliczna FIFO
algorytm przegląda kolejkę i kolejno przydziela każdemu kwant czasu (jeśli proces się w nim
nie zakończy – wraca do kolejki, a długość jego fazy procesora zmniejsza się o kwant czasu).
algorytm jest wywłaszczający
gdy jest N procesów a kwant czasu wynosi Q, max. czas oczekiwania może wynieść (N-1)Q
efekty:
-
gdy Q rośnie nieograniczenie; planowanie rotacyjne FCFS
- gdy Q zmierza do 0 zachodzi dzielenie procesora
– każdy proces dysponuje procesorem o
prędkości 1/N rzeczywistego.
-
a propos: podobny efekt dają tzw. procesory peryferyjne – z np. 10 zestawami rejestrów; na
każde zadanie. Procesor peryf. wykonuje po 1 rozkazie każdego zadania. Zysk: procesor jest
szybszy od pamięci – całość nie jest 10x wolniejsza...)
Aspekty wydajnościowe:
-
wskazany jest długi kwant czasu w porównaniu z przełączaniem kontekstu (wpp zła wydajność)
-
reguła doświadczalna: kwant czasu powinien być dłuższy niż 80% faz procesora dla optymalnej
wydajności.
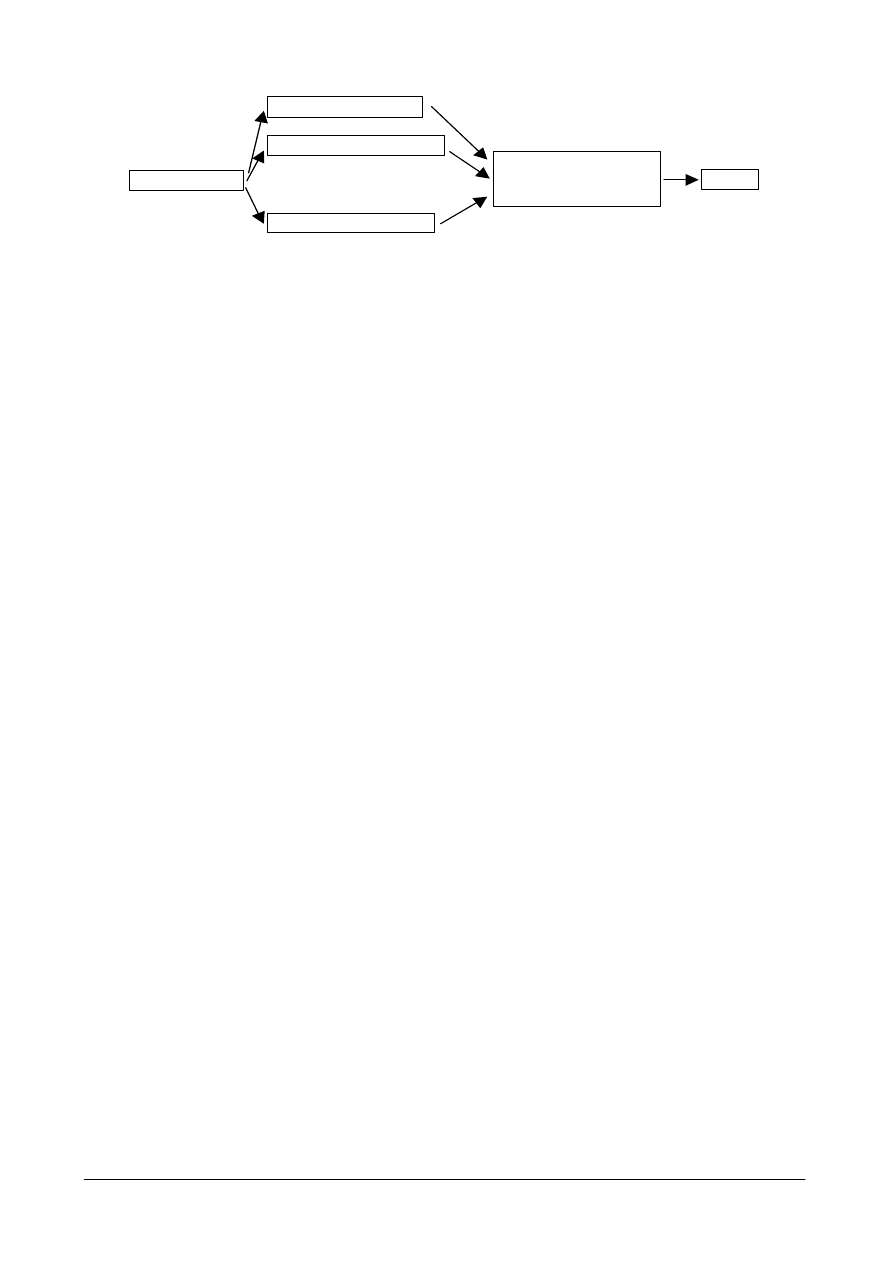
3.3 Struktura kolejek w systemie operacyjnym (planowanie wielopoziomowe).
Kolejka procesów gotowych jest podzielona na odrębne kolejki; przykładowo (najprościej):
-
procesów piewszoplanowych (systemowe, interakcyjne)
-
procesów drugoplanowych (wsadowe)
Każda kolejka ma własny algorytm szeregowania
Przykład:
- procesy piewszoplanowe - strategia karuzelowa (RR)
- procesy drugoplanowe - FIFO
Szeregowanie pomiędzy kolejkami:
-
Ustalone, np. obsługuj najpierw wszystkie procesy pierwszoplanowe, potem drugoplanowe;
możliwość zagłodzenia
-
Kwant czasu: każda kolejka otrzymuje ustaloną część czasu CPU do podziału pomiędzy swoje
procesy, np. 80% dla pierwszoplanowych z RR, 20% dla drugoplanowych z FCFS
-
Procesy mogą się przemieszczać pomiędzy kolejkami
Parametry planisty systemowego:
- liczba kolejek
-
algorytm szeregowania dla każdej kolejki
-
metoda awansu/degradacji procesów (do kolejki o odpowiednio niższym/wyższym priorytecie)
- metoda wybierania kolejki dla nowego procesu
Prz
ykład: proces zużywający dużo czasu procesora (np. cały kwant w RR) przechodzi do
kolejki o niższym priorytecie, ale dłuższym kwancie. Na najniższym poziomie: FCFS. Procesy
interakcyjne i zorientowane na we-
wy będą pozostawać w kolejkach o wyższym priorytecie, a
procesy zorientowane obliczeniowo -
w kolejkach o niższym priorytecie.
Systemy operacyjne
– notatki do wykładu
11
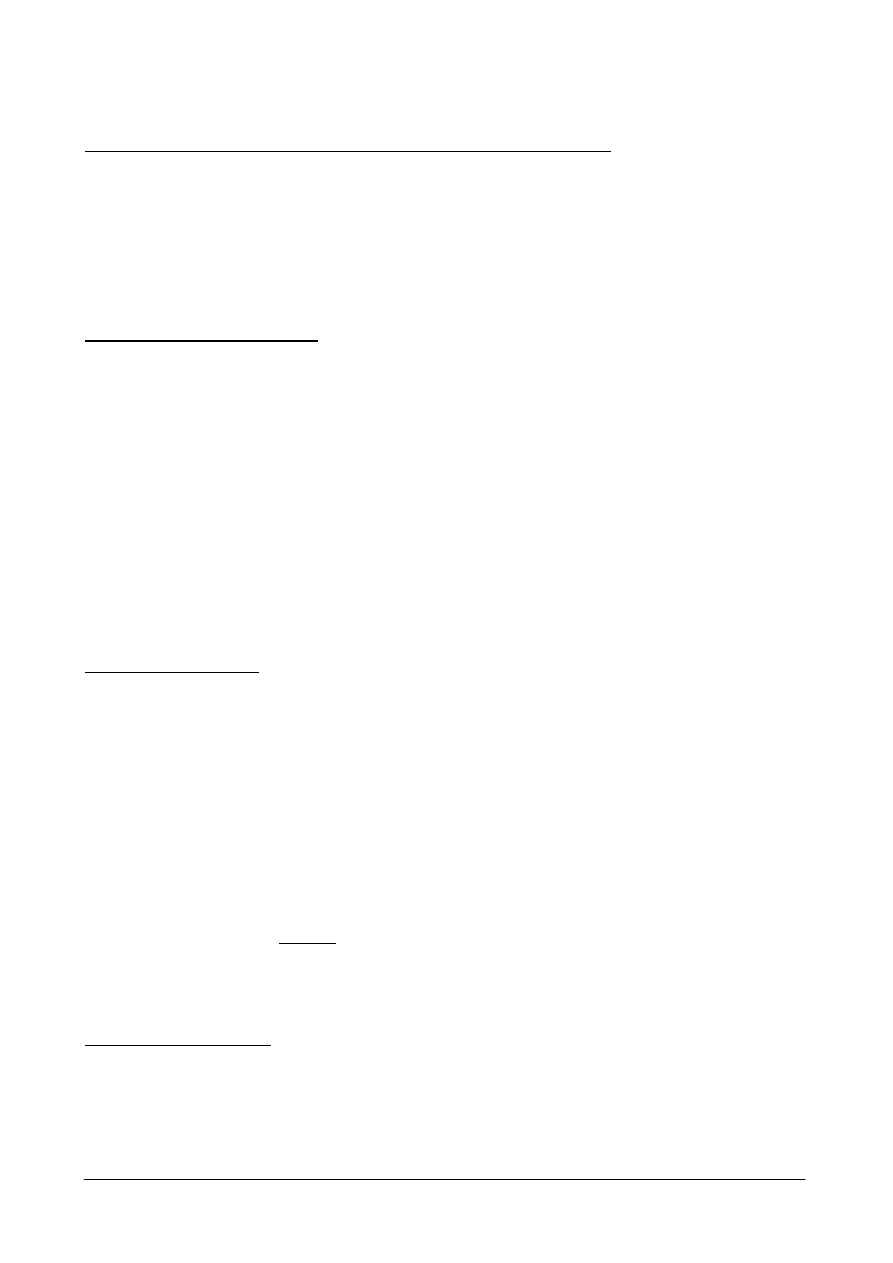
ZG
ŁOSZENIA
SYSTEMOWE (RR)
INTERAKCYJNE (RR)
...
WSADOWE (FCFS)
CPU
PRIORYTETOWE
WYW
ŁASZCZAJĄCE
(+ ew. postarzanie)
Wnioski z symulacji, teorii, praktyki:
-
rozkład faz jest na ogół w rzeczywistych systemach wykładniczy
-
jeśli średnia długość kolejki = n, średni czas obsługi = T, tempo przybywania nowych
procesów =
, to n =
T
(tw. Little’a; stosuje się ogólnie do stabilnych systemów kolejkowych)
Systemy wieloprocesorowe:
-
dzielenie (osobna kolejka i algorytm dla każdego procesora) lub...
-
wspólna kolejka:
-
każdy procesor sam wybiera proces do wykonania
-
jeden procesor przydziela procesy do procesorów
(tzw. wieloprzetwarzanie asymetryczne)
Wyszukiwarka
Podobne podstrony:
dobrucki,systemy operacyjne, op Nieznany
,systemy operacyjne,koordynacja Nieznany (2)
lewandowski,systemy operacyjne, Procesy i wątki
lewandowski,systemy operacyjne, Procesy zagadnienia planowania
5 Systemy Operacyjne 23 11 2010 Zarządzanie procesami
Podstawy systemow operacyjnych Nieznany
Algorytm Procesu Uruchomena Komputera, Systemy operacyjne
Proces Uruchamiania XP, Systemy operacyjne
Procesor, Szkoła, Systemy Operacyjnie i sieci komputerowe, utk, semestr II
,systemy operacyjne, system ope Nieznany (2)
5 Systemy Operacyjne 23 11 2010 Zarządzanie procesami
SO W2 Procesy i wątki w systemach operacyjnych
lewandowski,systemy operacyjne, Koordynacja procesów
Systemy Operacyjne 30 11 2010 Zarządzanie procesami
Systemy operacyjne
Planowanie systemow projekt 053 Nieznany
więcej podobnych podstron