U
Uk
kłła
ad
dy
y c
cy
yffr
ro
ow
we
e
E
LEKTRONIKA DLA WSZYSTKICH 8/97
32
Umiesz już dowolnie opóźniać oraz
skracać impulsy.
Nieprzypadkowo zachęcałem cię do
zaprzyjaźnienia się z „kostkami Schmit−
ta”. Przy czasach opóźnienia większych
niż kilka mikrosekund, koniecznie trzeba
stosować takie właśnie bramki. Stosując
te bramki i kondensatory elektrolityczne
możesz uzyskać bardzo długie czasy, na−
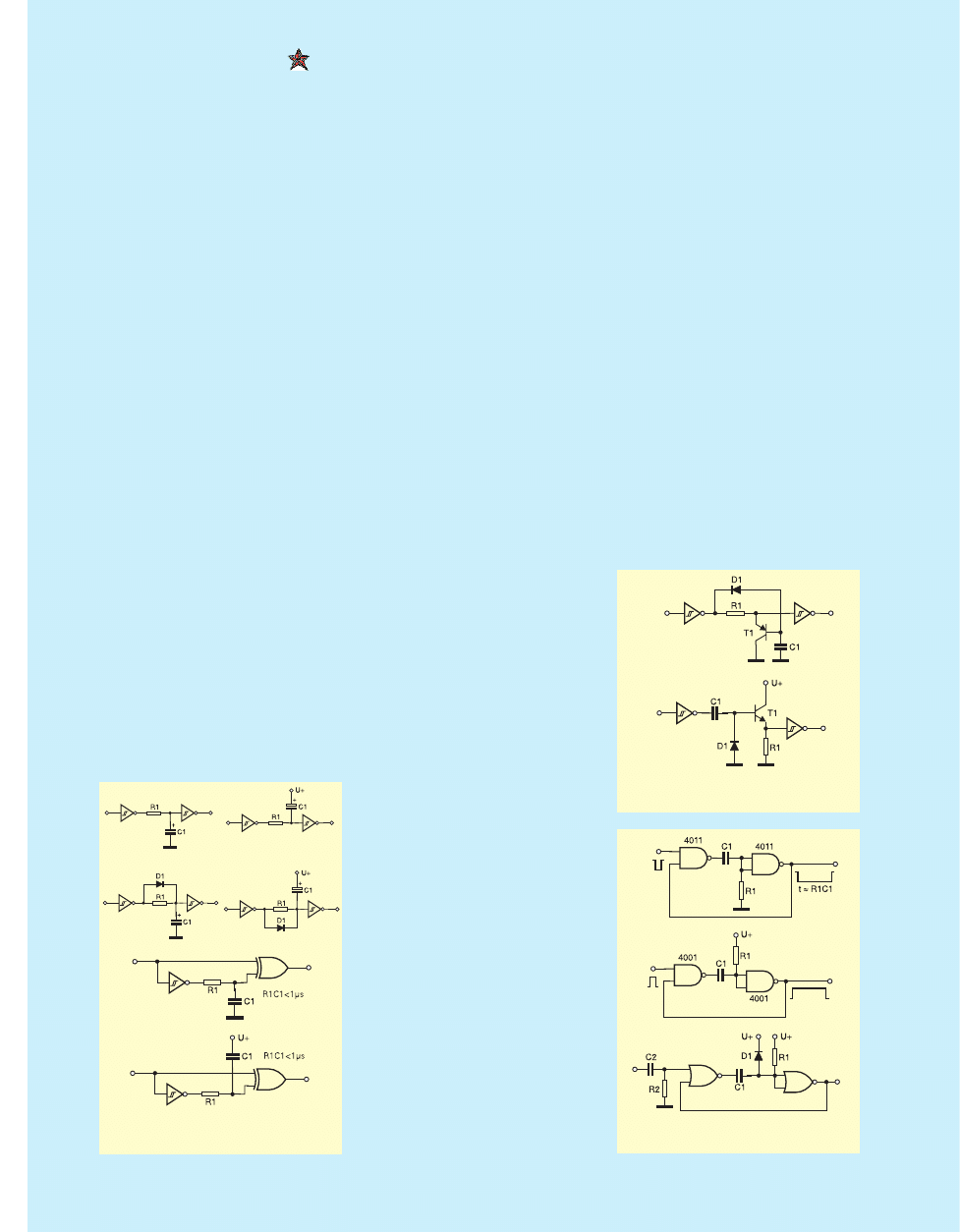
wet rzędu minut. W układach z rysun−
ków 45...47 możesz stosować konden−
satory elektrolityczne o dowolnie dużej
pojemności, bylebyś tylko zachował ich
właściwą biegunowość. Ale tu czeka na
ciebie pewna pułapka: jeśli w twoim
układzie aluminiowe kondensatory elek−
trolityczne cały czas będą pozostawać
bez napięcia, to na pewno rozformują
się, wzrośnie ich prąd upływu i w kon−
sekwencji układ na pewno nie będzie
pracował. Nie znaczy to, że zwykłe elek−
trolity się nie nadają do układów czaso−
wych – nadają się. Jeśli jednak chcesz
zastosować aluminiowe elektrolity, to
musisz włączyć je tak, aby w stanie spo−
czynku były pod napięciem – na rry
ys
su
un
n−
k
ku
u 4
48
8 zobaczysz różne możliwości. Wer−
sje 48a i b, oraz 48c i d a także 48e i f są
równoważne – o tym którą z nich wybrać
zadecydują stany, jakie w stanie spo−
czynku (lub też przez większość czasu)
występują na wyjściu pierwszej bramki.
Ze względu na wzrost prądu upływu
aluminiowych elektrolitów, przechowy−
wanych bez napięcia, NIGDY nie stosuj
ich w układach, które będą włączane tyl−
ko dorywczo. To częsty błąd popełniany
nie tylko przez początkujących. Wi−
działem już kilka układów alarmowych,
montowanych przez „profesjonalistów”,
gdzie zwykłe elektrolity w obwodach cza−
sowych wręcz latami były pozostawione
bez napięcia. Oczywiście wtedy, gdy
alarm wreszcie powinien zadziałać, nie
zadziała właśnie przez takie elektrolity.
Pamiętaj o tym, to bardzo ważne!
Jeśli obawiasz się zastosowania alumi−
niowych elektrolitów, zastosuj kondensa−
tory tantalowe; mają one zdecydowanie
mniejszy prąd upływu i się nie rozformo−
wują. Innym rozwiązaniem będzie wyko−
rzystanie kondensatora stałego (foliowe−
go MKT, MKSE) o pojemności 1...2,2µF
i tranzystora. Dwa przykładowe układy
znajdziesz na rry
ys
su
un
nk
ku
u 4
49
9. Czas opóźnie−
nia lub czas impulsu zwiększy się mniej
więcej tyle razy, ile wynosi wzmocnienie
prądowe tranzystora, czyli kilkadziesiąt
do kilkuset razy. Dioda służy do rozłado−
wania kondensatora po przyjściu drugie−
go, nieaktywnego zbocza przebiegu. Ale
i tu tkwi pewna pułapka: Długi czas uzys−
kuje się kosztem radykalnego zmniejsze−
nia prądu ładowania niewielkiego kon−
densatora. Prąd ten jest rzędu nanoam−
perów. Takiego rzędu prądy upływu mogą
też płynąć po powierzchni brudnej płytki,
która kilka lat będzie pracować w zakurzo−
nym i zawilgoconym otoczeniu. Dlatego
stosując sposób z rysunku 49 koniecznie
trzeba polakierować płytkę dobrym lakie−
rem izolacyjnym.
Szczerze mówiąc, dla układów, które
mają długo i niezawodnie pracować, ra−
dzę ci raczej właściwe wykorzystać elek−
trolity (rys. 48), najlepiej tantalowe, niż
układy z tranzystorem (rys 49). Dobrym
sposobem jest też użycie kostek zawiera−
jących
liczniki
(np.
CMOS4060,
CMOS4541) – takie metody przedstawię
ci w jednym z następnych artykułów.
Do tej pory mówiliśmy o opóźnianiu
i skracaniu impulsów. Bardzo często po−
trzebne są układy, które pobudzone – ge−
nerują impuls o określonej długości.
Wykorzystaj do tego jeden z układów
pokazanych na rry
ys
su
un
nk
ku
u 5
50
0. Ponieważ wy−
stępuje tu silne dodatnie sprzężenie
zwrotne, nie musisz stosować bramek
„ze szmitem”, nawet przy długich cza−
sach i wykorzystaniu (tantalowego) elek−
trolita w roli C1. W zasadzie są to układy
wyzwalane krótkim impulsem: ujemnym
– rry
ys
su
un
ne
ek
k 50a lub dodatnim – rysunek
50b. Czasem potrzebne jest wyzwalanie
zboczem – wtedy wystarczy na wejściu
zastosować (tzw. różniczkujący) obwód
RC o małej stałej czasowej, rzędu mikro−
sekund czy milisekund. Z kolei jeśli po za−
kończeniu cyklu potrzebne jest szybkie
rozładowanie kondensatora (by przygoto−
wać układ do nowego cyklu), wtedy rów−
nolegle do rezystora trzeba włączyć dio−
dę. Warto zauważyć, że włączenie diody
skutecznie rozwiązuje problemy z rozła−
dowaniem kondensatora i przepływem
prądów wejściowych bramki, zasygnali−
P i e r w s z e k r o k i
w cyfrówce
cczzęęśśćć 88
e)
f)
c)
d)
a)
b)
Rys. 48. Różne sposoby włączania
kondensatorów
b)
a)
Rys. 49. Układy opóźniające
z tranzystorem
c)
a)
b)
Rys. 50. Układy przerzutników mono−
stabilnych – uniwibratorów
U
Uk
kłła
ad
dy
y c
cy
yffr
ro
ow
we
e
33
E
LEKTRONIKA DLA WSZYSTKICH 8/97
zowane przy omawianiu rysunku 47
i w żadnych okolicznościach nie trzeba
stosować pokazanego tam szeregowego
rezystora ograniczającego. Tak zmodyfi−
kowany przerzutnik monostabilny poka−
zany jest na rysunku 50c.
Układy z rysunku 50 są użyteczne
w praktyce, mają też pewną cechę, która
niekiedy jest zaletą, a niekiedy wadą.
Mianowicie pierwszy nadchodzący krótki
impuls powoduje uruchomienie naszego
przerzutnika monostabilnego (zwanego
też przerzutnikiem jednostabilnym, uni−
wibratorem lub monowibratorem) i prze−
rzucenie go do tak zwanego stanu wzbu−
dzenia na czas wyznaczony wartością
elementów R1, C1. Jeśli w trakcie trwa−
nia tego wzbudzenia, na wejściu pojawi
się nastepny krótki im−
puls, to zostanie on zig−
norowany – nie będzie
miał żadnego wpływu na
czas trwania impulsu wy−
jściowego. W praktyce
często potrzebne nam są
układy
monostabilne,
w których każdy kolejny
nadchodzący krótki im−
puls wejściowy będzie
przedłużał czas trwania
impulsu na wyjściu – an−
gielskiej literaturze spo−
tyka się określenie retrig−
ger (powtarzane wyzwa−
lanie), które wskazuje na
możliwość
takiego
przedłużania
impulsu.
W licznych książkach do
wszelkich obwodów uza−
leżnień czasowych proponuje się wyko−
rzystanie specjalizowanych układów sca−
lonych. Kiedyś dawno rzeczywiście sto−
sowano powszechnie kostkę 74121, ale
nie miała ona możliwości przedłużania
impulsu. Stosowano też kostki 74123,
a także podwójne wersje obu kostek.
Ja osobiście nie polecam ci tych staro−
ci. Układy uzależnień czasowych wyko−
nasz w prosty sposób, bez specjalizowa−
nych kostek, stosując kilka negatorów
czy bramek NAND „ze szmitem” i ewen−
tualnie diodę lub tranzystor. Na poprzed−
nich rysunkach pokazałem ci sporą kolek−
cję odpowiednich schematów. Pora na
następne. Właściwie samą ideę już ci je
podałem na rysunku 46. Na rry
ys
su
un
nk
ku
u 5
51
1
zobaczysz kilka przykładów przerzutni−
ków monostabilnych, uniwibratorów
z możliwością przedłużania impulsu wy−
jściowego. Te proste układy są naprawdę
przydatne i znakomicie sprawdzają się
w większości zastosowań. Musisz tylko
zwrócić uwagę na dwie sprawy.
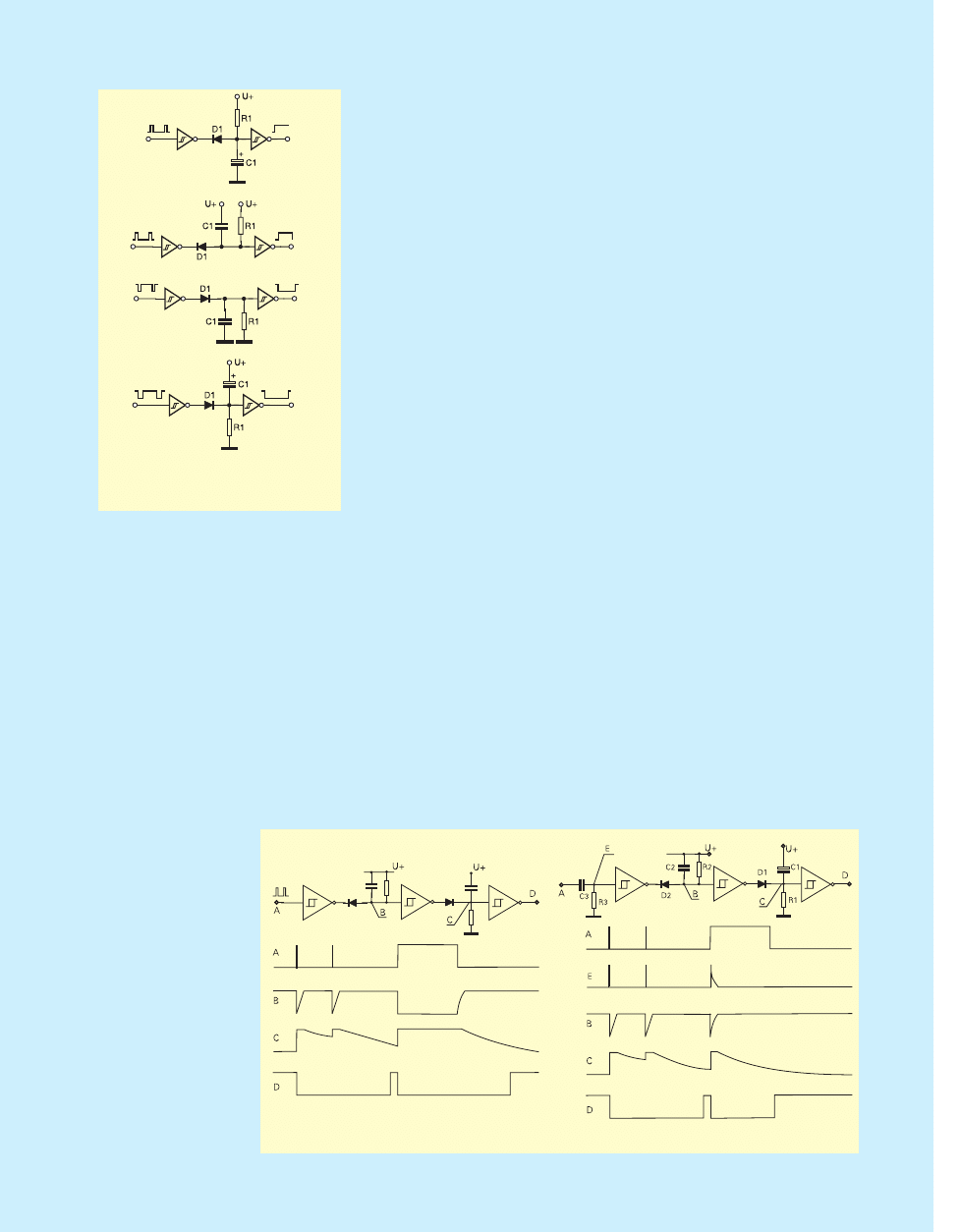
Po pierwsze, jak widzisz na rysunkach
51a i c możesz tu uzyskać dowolnie dłu−
gie czasy stosując kondensatory elektro−
lityczne i rezystory rzędu 1M
Ω
. Przy sto−
sowaniu zwykłych elektrolitów zapewne
zechcesz, by w spoczynku były pod na−
pięciem – właśnie układy z rysunków
a i c spełniają ten warunek. Musisz jed−
nak wziąć pod uwagę, że przy włączaniu
zasilania kondensatory te zaczną się łado−
wać przez rezystory, co spowoduje wy−
generowanie impulsu po każdym włącze−
niu zasilania. Inaczej jest w układach z ry−
sunków b oraz d. Tu przy włączaniu zasi−
lania nic się nie będzie działo, ale konden−
satory w spoczynku pozostają bez napię−
cia – dlatego narysowałem tam konden−
satory stałe.
Teraz druga sprawa.
Specjalizowane układy scalone są wy−
zwalane zboczem, to znaczy, że cykl za−
czyna się po pojawieniu się odpowiednie−
go zbocza. Wtedy długość impulsu wy−
zwalającego nie odgrywa żadnej (lub pra−
wie żadnej) roli. W prostych układach
z rysunku 51 czas trwania impulsu wy−
zwalającego ma znaczenie. Jeśli impuls
wejściowy będzie za krótki, to kondensa−
tor nie zdąży się w pełni naładować (roz−
ładować) przez diodę D1. Minimalny czas
impulsu wyzwalającego możesz oszaco−
wać obliczając stałą czasową RoC1, gdzie
C to dołączona pojemność , a Ro to re−
zystancja wyjściowa współpracującej
bramki (wcześniej, przy okazji omawiania
rysunku 35 podałem ci przybliżone war−
tości). Przykładowo, jeśli chcesz uzyskać
długi czas impulsu wyjściowego, zasto−
suj kondensator elektrolityczny i zewnę−
trzny rezystor o wartości 1...3,3M
Ω
(re−
zystorów o większej wartości nie pole−
cam ci ze względu na wspomniane prądy
upływu zakurzonej i wilgotnej płytki). Przy
pojemności 100µF uzyskasz czas impul−
su wyjściowego ponad minutę. Policz po−
trzebny minimalny czas trwania impulsu
wyzwalającego. Jeśli twój układ zawiera
negatory 40106 lub bramki 4093 i pracu−
je przy napięciu zasilania równym 5V
przyjmij, że rezystancja wyjściowa bram−
ki wyniesie 1k
Ω
. Stała czasowa Ro x C1
wynosi 100µFx1k
Ω
= 100ms. Przy wy−
ższych napięciach czas ten będzie odpo−
wiednio krótszy.
Jeśli przewidywane impulsy wyzwala−
jące miałyby być krótsze, zastosuj na we−
jściu równie prosty układ wydłużania im−
pulsu. W zależności od potrzeb możesz
jeszcze dodać na wejściu obwód różnicz−
kujący RC.
Przykładowe rozwiązania pokazane są
na rry
ys
su
un
nk
ku
u 5
52
2.
Na rysunku 52a znajdziesz układ, który
daje na wyjściu stan niski, jeśli na we−
jściu pojawiają się nawet krótkie impulsy
dodatnie. Zauważ, że stan aktywny na
d)
b)
a)
c)
Rys. 51. Przerzutniki monostabilne
z możliwością przedłużania impulsu
wyjściowego
a)
b)
Rys. 52. Układy przerzutników o bardzo długich czasach z obwodami wydłużania impulsów
wyjściu (niski) będzie też panował cały
czas trwania stanu dodatniego na we−
jściu i jeszcze przez czas opóźnienia, wy−
znaczony głównie przez R1C1.
Nieco inaczej działa układ z rysunku
52b. Tu dodatkowo zastosowałem na
wejściu obwód różniczkujący C3R3. Jeśli
na wejściu A będą regularnie pojawiać
się impulsy (albo przebieg prostokątny),
to wyjście układu, czyli punkt D, będzie
stale w stanie niskim. Jeśli przebieg na
wejściu zaniknie, na wyjściu pojawi się
stan wysoki. Masz oto dyskryminator
częstotliwości – jeśli częstotliwość prze−
biegu podawanego na wejście będzie od−
powiednio duża – na wyjściu D będzie się
utrzymywał stan niski; jeśli częstotliwość
będzie zbyt mała – na wyjściu pojawią się
impulsy dodatnie.
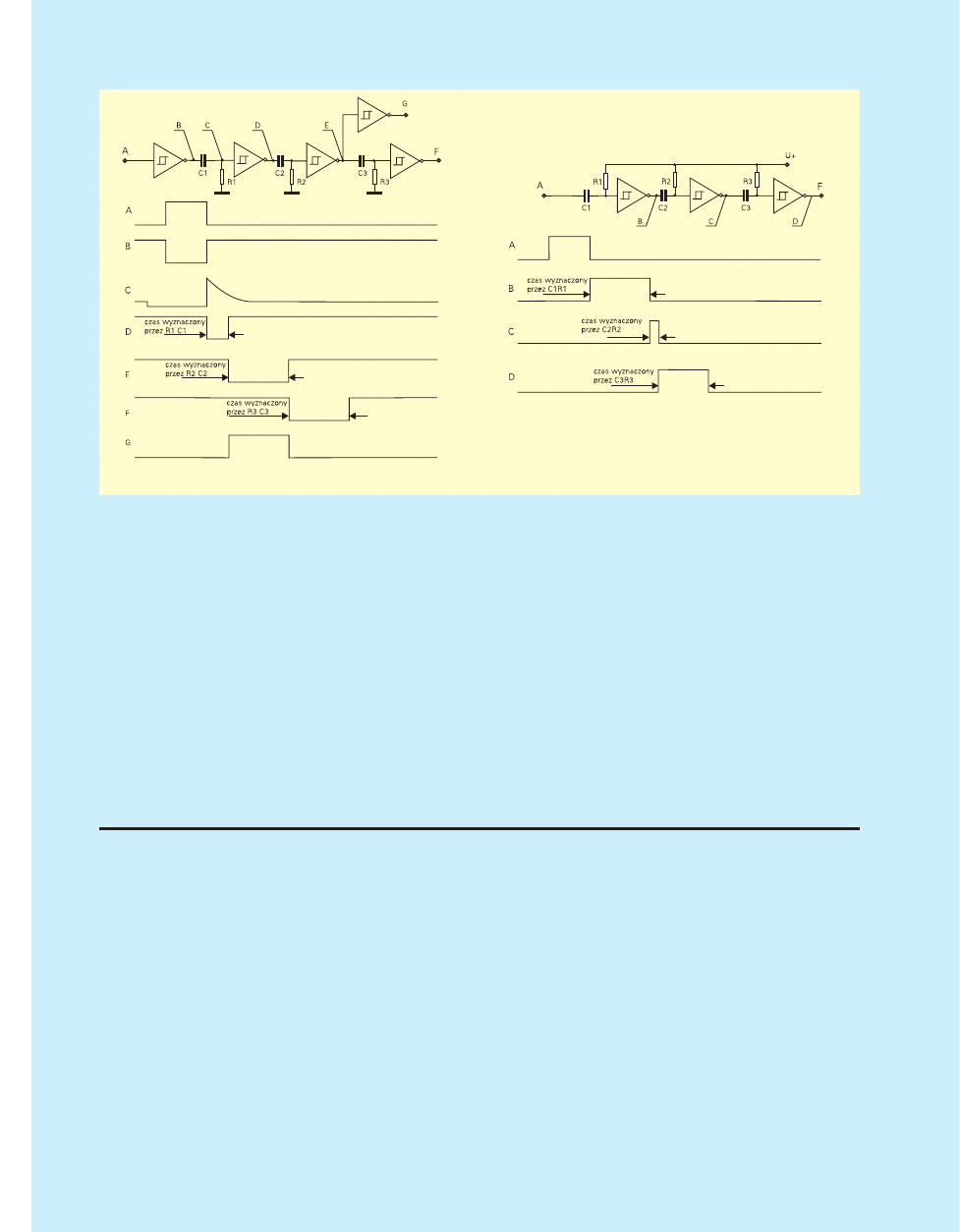
Na zakończenie kolekcji układów cza−
sowych jeszcze układy z rry
ys
su
un
nk
ku
u 5
53
3. Za−
uważ, w jaki beznadziejnie prosty sposób
z użyciem kilku inwerterów „ze szmitem”
możesz uzyskać efekt biegnącego zera
lub biegnącej jedynki. Bardzo często taki
sposób jest tańszy i lepszy niż wykorzys−
tanie rejestru przesuwnego albo licznika
z dekoderem. Dodatkową zaletą jest fakt,
że poszczególne czasy mogą być dobiera−
ne w bardzo szerokich granicach, nieza−
leżnie jeden od drugiego (pokazałem ci to
na rysunku). Przy dobieraniu czasów nie
możesz jednak przesadzić. Przy drugim,
nieaktywnym zboczu kondensator musi
się zdążyć rozładować. Dlatego jeśli któ−
ryś z czasów byłby wyjątkowo krótki, po−
winieneś zastosować diodę równolegle
do rezystora, jak na rysunku 50c.
Podany sposób opóźnienia można za−
stosować choćby w prostych układach
sterujących wyświetlaczem licznika−częs−
tościomierza. Przykładowo w układzie
z rysunku 53a impuls wejściowy swym
stanem wysokim umożliwia pracę liczni−
ka. Po krótkim czasie opóźnienia (R1C1)
dodatni impuls z wyjścia G wpisuje za−
wartość licznika do pamięci (zatrzasku,
latcha), a ujemny impuls z następnego
wyjścia F zeruje licznik przygotowując go
do następnego cyklu pracy.
P
Piio
ottrr G
Gó
órre
ec
ck
kii
U
Uk
kłła
ad
dy
y c
cy
yffr
ro
ow
we
e
E
LEKTRONIKA DLA WSZYSTKICH 8/97
34
a)
b)
Rys. 53. Układy do wytwarzania „biegnącego zera” lub „biegnącej jedynki”
Wyszukiwarka
Podobne podstrony:
1997 01 Pierwsze kroki w cyfrówce
1997 02 Pierwsze kroki w cyfrówce
1997 03 Pierwsze kroki w cyfrówce
1997 01 Pierwsze kroki w cyfrówce
1997 09 Pierwsze kroki w cyfrówce
1997 11 Pierwsze kroki w cyfrówce
1997 06 Pierwsze kroki w cyfrówce
1998 02 Pierwsze kroki w cyfrówce
1998 07 Pierwsze kroki w cyfrówce
Pierwsze kroki w cyfrówce cz06
1998 12 Pierwsze kroki w cyfrówce
więcej podobnych podstron