
1
Kody alarmów i procedury wykrywania/usuwania usterek
dla modułowego systemu sterowania AC
Przewodnik wykrywania i usuwania usterek jest przeznaczony dla techników, którzy już mają pewne doświadczenia
z wózkami AC Reach. Ten plik dzieli się na kilka rozdziałów zawierających alarmy, które mogą być generowane w
każdym z modułów.
Trzy podręczniki serwisowe obejmują wszystkie aspekty techniczne zakresu wózków AC Reach: jeden z nich obej-
muje Modułowy System Sterowania, drugi obejmuje system elektryczny, mechaniczny i hydrauliczny, trzeci doty-
czy systemu EPS-AC. Wszystkie trzy podręczniki można zamówić w Xerox lub korzystać w trybie „on-line” albo w
wersji CD Warehouse Equipment Service (dostępne w Xerox).
Jak korzystać z podręcznika:
1.
Zidentyfikuj wszystkie alarmy występujące w wózku, wszelkie wskazówki na ekranie wózka są tylko ogólna
informacją. Dołącz do modułu EPS przenośny tester ZAPI i stwierdź, czy występują jakieś alarmy, następnie
wejdź przy pomocy modułu EPS do pozostałych modułów i sprawdzaj, czy są tam jakieś czynne alarmy i w
którym z tych modułów.
2.
Po zidentyfikowaniu modułów z czynnymi alarmami kliknij na poniższe linki (lub skorzystaj z zakładek pdf
występujących w tym pliku) do znalezionych modułów.
3.
Znajdziesz listę alarmów, opis każdego z nich i procedurę wykrywania / usuwania usterek krok po kroku dla
każdego z tych alarmów.
Moduł 1
CAN IO
Moduł 2
Moduł trakcyjny AC2T
Moduł 5
Moduł pompy AC2B
Moduł 6
EPS-AC
Moduł 9
MHYRIO
Moduł 16
SICOS
1
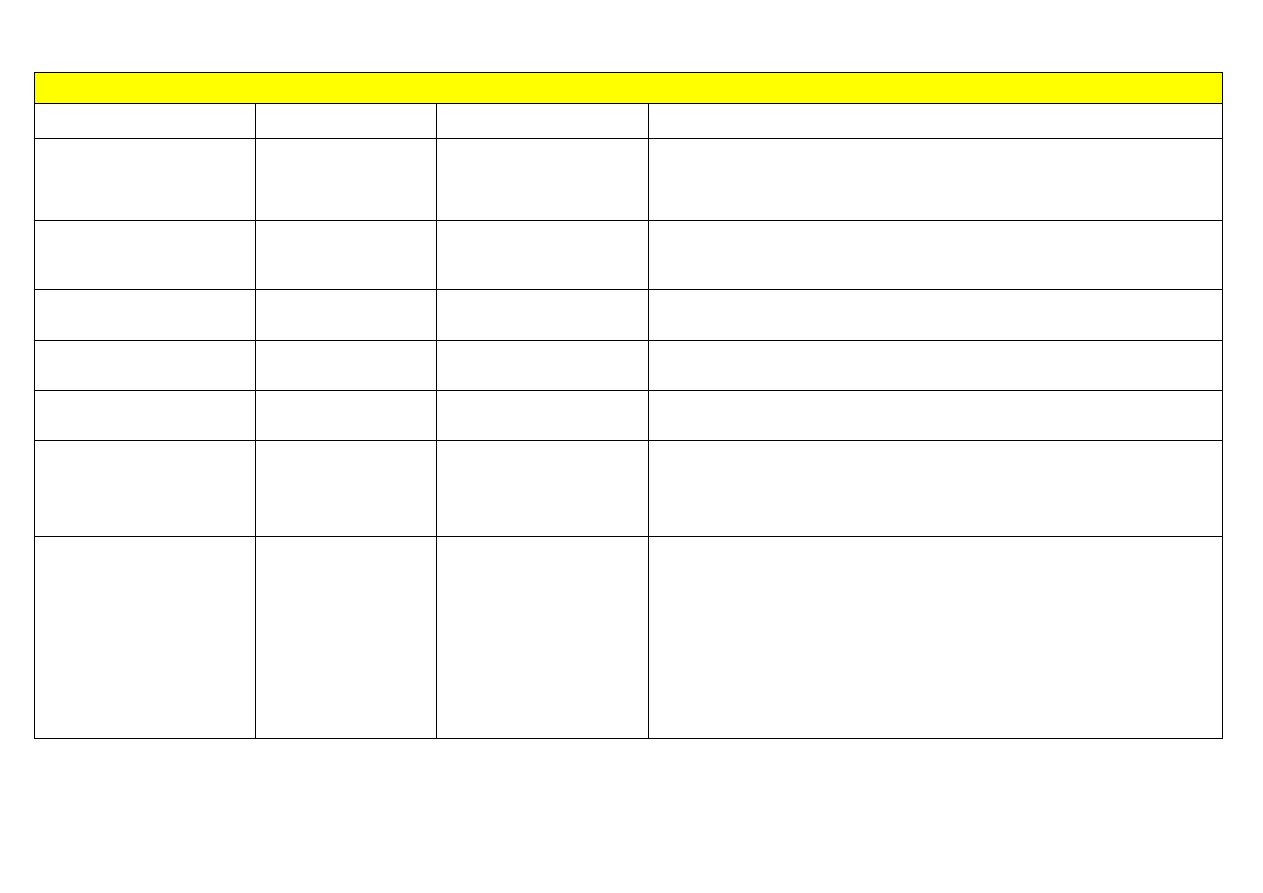
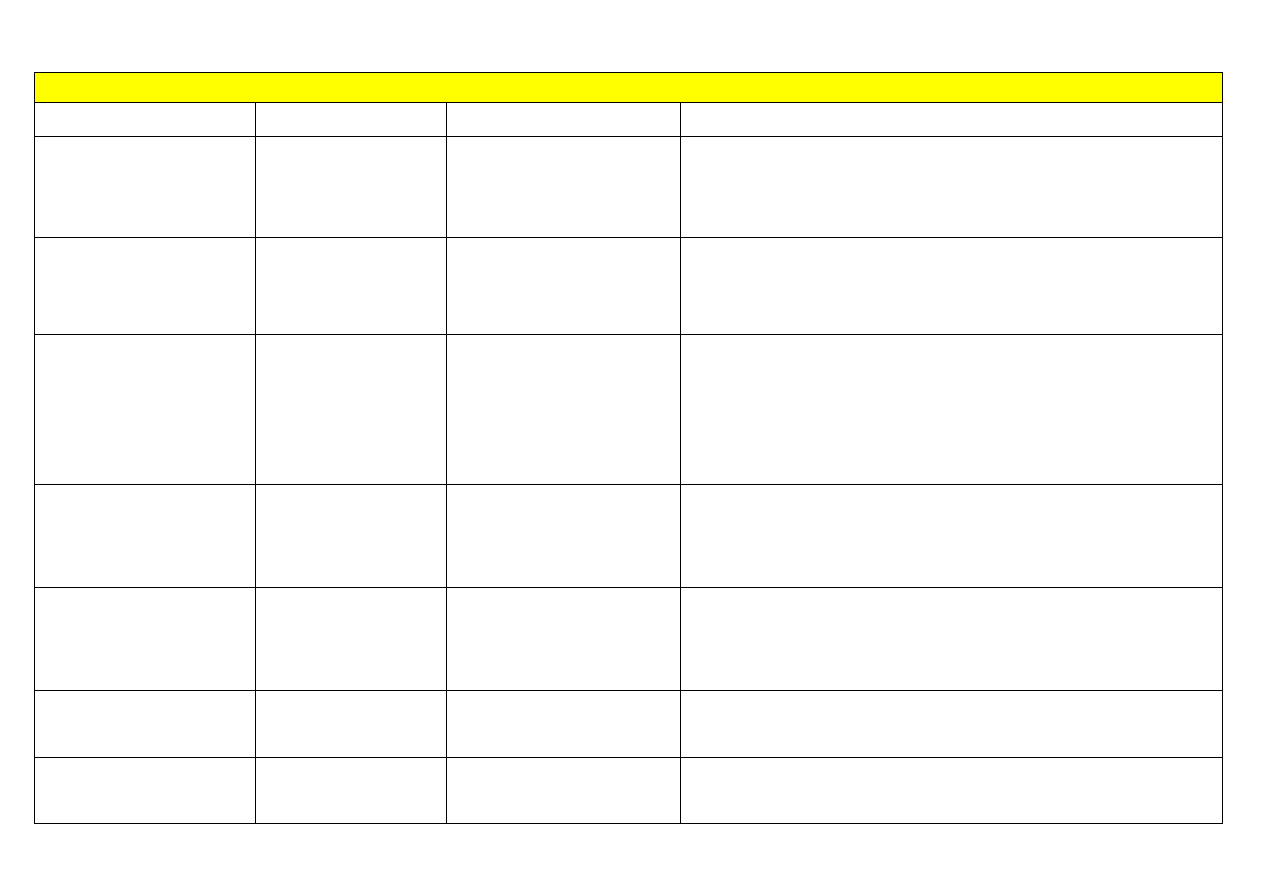
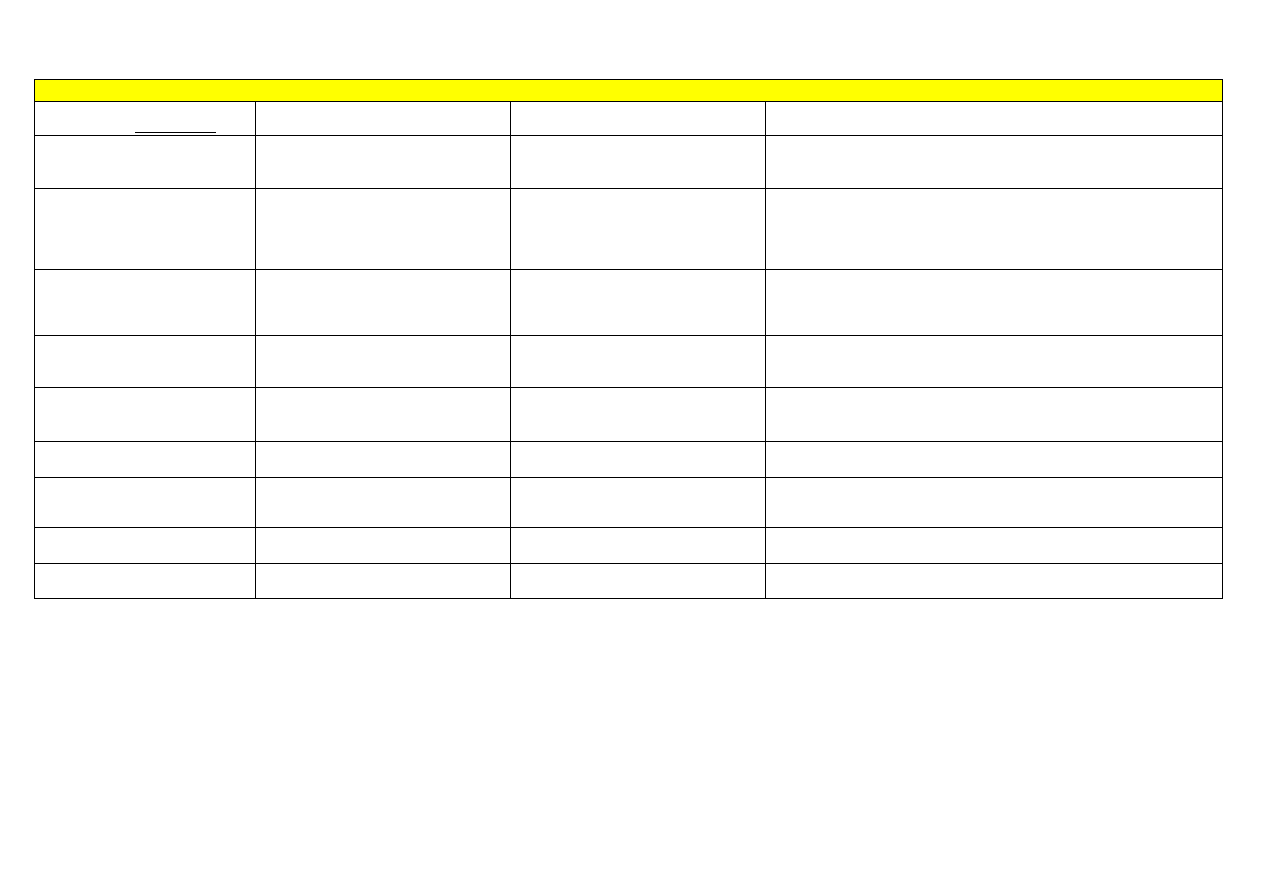
Moduł 1 CAN IO
EPROM NA3.04
Alarm generowany i czytany z modułu
1 CAN IO EPROM NA3.04
Opis alarmu
Zachowanie wózka przy włączonej
stacyjce lub podczas pracy
Postępowanie
VACC NOT OK
Wysoki poziom sygnału z
modułu przyspieszania w
stanie spoczynku bez zezwo-
lenia z mikrołącznika zezwole-
nia
Funkcje trakcji zabronione, dostępne
funkcje kierowania i hydrauliki.
1_Powtórz procedurę kalibracji potencjometru w menu CAN IO PROGRAM VACC.
2_Sprawdź, czy potencjometr i jego wspornik są prawidłowo zamocowane, sprawdź też sygnał wyjściowy potencjo-
metru testerem dołączonym do CAN IO: zmiany od 1.49 do ok. 3.43 – sprawdź i w razie potrzeby wymień przewo-
dy między potencjometrem i pinami 4A – 5A – 7A modułu CAN IO.
3_ Sprawdź mocowanie i działanie czujnika zezwolenia, dołącz tester do CAN IO, wejdź do funkcji testowania i
sprawdź działanie LED-ów przy zmianach stanów wejściowych czujnika, ten LED powinien świecić gdy …, sprawdź
i w razie potrzeby wymień przewód z czujnika do pinu 1G CAN IO.
4_ Jeśli problem nie ustępuje, wymień moduł CAN IO.
PEDAL WIRE KO
Wartość sygnału z potencjo-
metru trakcji jest powyżej
zaprogramowanej wartości
granicznej.
Wózek działa normalnie, jeśli pedał
przyspieszenia nie jest wciśnięty do
oporu. W tym ostatnim przypadku
wózek natychmiast staje.
1_Powtórz procedurę kalibracji potencjometru w menu CAN IO PROGRAM VACC.
2_Sprawdź, czy potencjometr i jego wspornik są prawidłowo zamocowane, sprawdź też sygnał wyjściowy potencjo-
metru testerem dołączonym do CAN IO: zmiany od 1.49 do ok. 3.43 – sprawdź i w razie potrzeby wymień przewo-
dy między potencjometrem i pinami 4A – 5A – 7A modułu CAN IO.
3_ Jeśli problem nie ustępuje, wymień moduł CAN IO.
POT#1 NOT OK
Wysoki poziom sygnału z
joysticka podnoszenia / opusz-
czania w stanie spoczynku bez
zezwolenia z mikrołącznika
zezwolenia
Jeśli alarm jest generowany podczas
żądania podnoszenia wideł, inne
funkcje hydrauliczne będą działać
normalnie. Jeśli alarm już występuje,
wszystkie funkcje hydrauliczne są
wstrzymane.
1_ Sprawdź testerem joystick w CAN IO:
Min Acc Lift=2.6V
Max Acc Lift = 4.5V
Min Acc Low = 2.4V
Max Acc Low = 0.5V
2_Sprawdź testerem kalibrację joysticka w menu Special Adjustment.
3_Sprawdź połączenie na pinie 1B CAN IO.
4_Sprawdź czy konektor pod płytą czterech dźwigni jest solidnie zamocowany.
5_Sprawdź zasilanie potencjometru na płycie pod czterema dźwigniami.
6_Wymień joystick.
7_Wykonaj funkcję CARRY EPROM testerem dołączonym do CAN IO, po tej operacji sprawdź wszystkie parametry.
POT#2 NOT OK
Wysoki poziom sygnału z
joysticka sięgania / wycofania
w stanie spoczynku bez ze-
zwolenia z mikrołącznika
zezwolenia
Jeśli alarm jest generowany podczas
żądania sięgania / wycofania nośni-
ka, inne funkcje hydrauliczne będą
działać normalnie. Jeśli alarm już
występuje, wszystkie funkcje hydrau-
liczne są wstrzymane.
1_ Sprawdź testerem joystick w CAN IO:
Min Reach Back =2.6V
Max Reach Back = 4.5V
Min Reach Fwd = 2.4V
Max Reach Fwd = 0.5V
2_Sprawdź testerem kalibrację joysticka w menu Special Adjustment.
3_Sprawdź połączenie na pinie 4B CAN IO.
4_Sprawdź czy konektor pod płytą czterech dźwigni jest solidnie zamocowany.
5_Sprawdź zasilanie potencjometru na płycie pod czterema dźwigniami.
6_Wymień joystick.
7_Wykonaj funkcję CARRY EPROM testerem dołączonym do CAN IO, po tej operacji sprawdź wszystkie parametry.
POT#3 NOT OK.
Wysoki poziom sygnału z
joysticka przechyłu w stanie
spoczynku bez zezwolenia z
mikrołącznika zezwolenia
Jeśli alarm jest generowany podczas
żądania przechyłu wideł, inne funkcje
hydrauliczne będą działać normalnie.
Jeśli alarm już występuje, wszystkie
funkcje hydrauliczne są wstrzymane.
1_ Sprawdź testerem joystick w CAN IO:
Min Tilt Up=2.6V
Max Tilt Up = 4.5V
Min Tilt Down = 2.4V
Max Tilt Down = 0.5V
2_Sprawdź testerem kalibrację joysticka w menu Special Adjustment.
3_Sprawdź połączenie na pinie 1C CAN IO.
4_Sprawdź czy konektor pod płytą czterech dźwigni jest solidnie zamocowany.
5_Sprawdź zasilanie potencjometru na płycie pod czterema dźwigniami.
6_Wymień joystick.
7_Wykonaj funkcję CARRY EPROM testerem dołączonym do CAN IO, po tej operacji sprawdź wszystkie parametry.
2
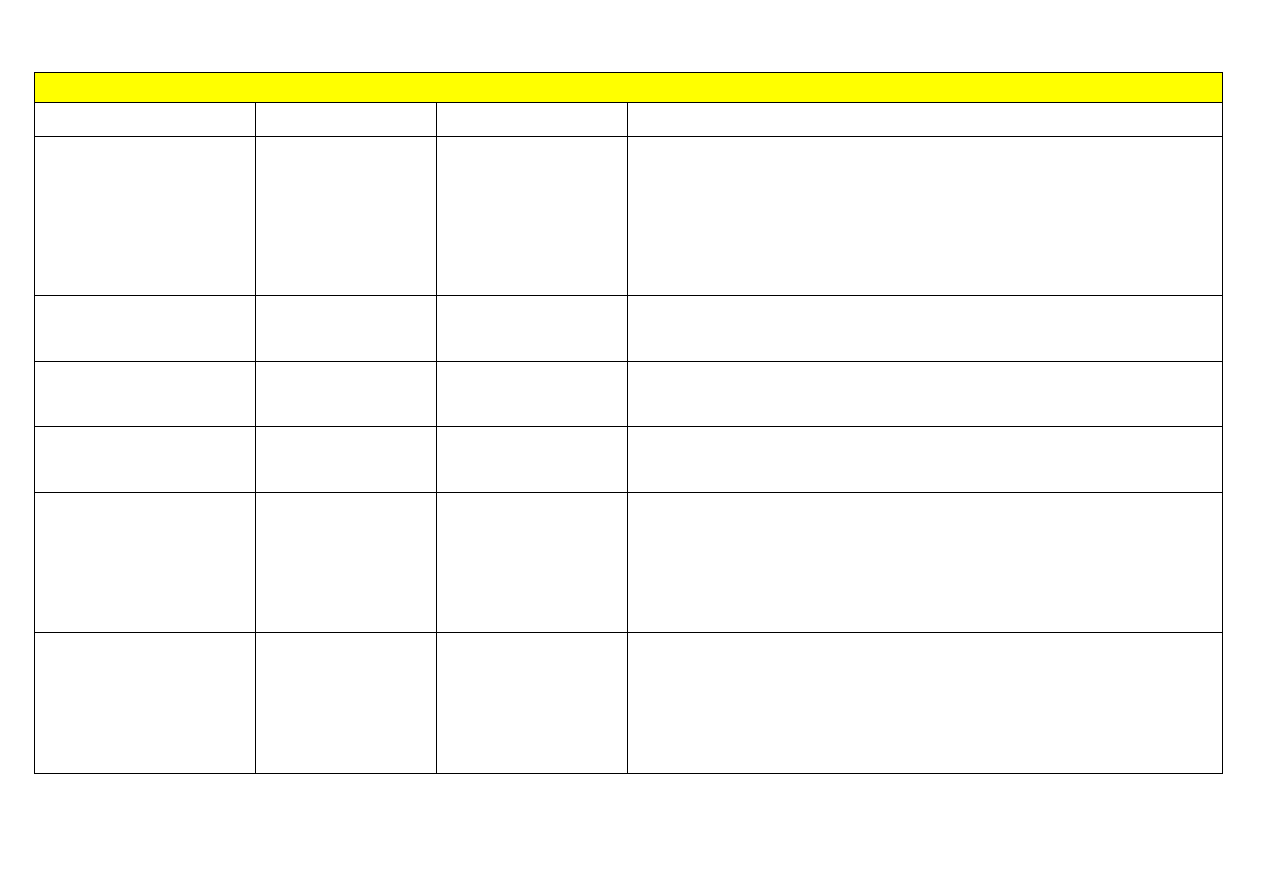
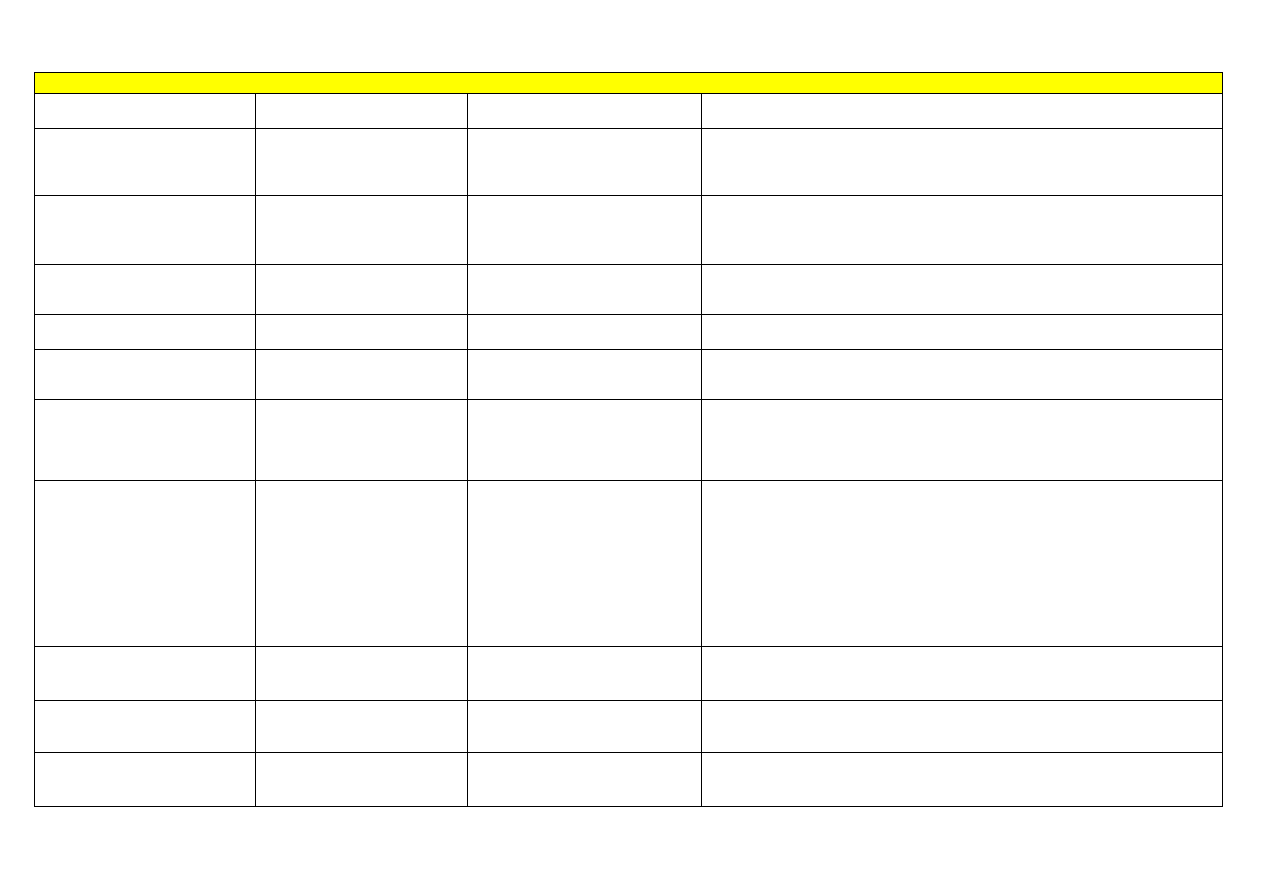
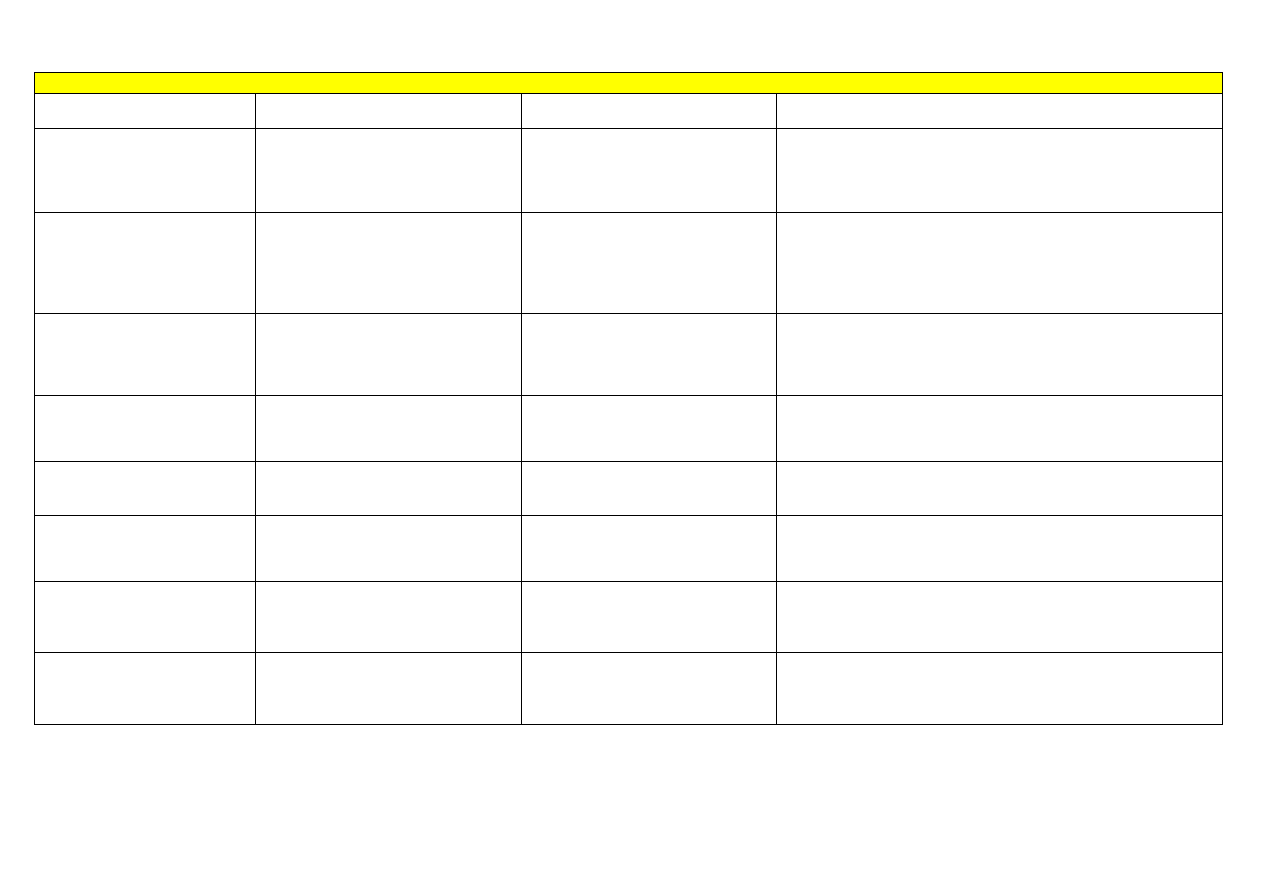
Moduł 1 CAN IO
EPROM NA3.04
Alarm generowany i czytany z modułu
1 CAN IO EPROM NA3.04
Opis alarmu
Zachowanie wózka przy włączonej
stacyjce lub podczas pracy
Postępowanie
POT#4 NOT OK
Wysoki poziom sygnału z
joysticka przesuwu bocznego
w stanie spoczynku bez ze-
zwolenia z mikrołącznika
zezwolenia
Jeśli alarm jest generowany podczas
żądania przesuwu bocznego, inne
funkcje hydrauliczne będą działać
normalnie. Jeśli alarm już występuje,
wszystkie funkcje hydrauliczne są
wstrzymane.
1_ Sprawdź testerem joystick w CAN IO:
Min Shift Right =2.6V
Max Shift Right = 4.5V
Min Shift Left = 2.4V
Max Shift Left = 0.5V
2_Sprawdź testerem kalibrację joysticka w menu Special Adjustment.
3_Sprawdź połączenie na pinie 4C CAN IO.
4_Sprawdź czy konektor pod płytą czterech dźwigni jest solidnie zamocowany.
5_Sprawdź zasilanie potencjometru na płycie pod czterema dźwigniami.
6_Wymień joystick.
7_Wykonaj funkcję CARRY EPROM testerem dołączonym do CAN IO, po tej operacji sprawdź wszystkie parametry.
CAN BUS KO TR
Okresowe komunikaty z modu-
łu trakcji mod.2 AC2T Traction
nie przychodzą na czas.
Wszystkie funkcje wózka
są wstrzymane.
1_Sprawdź przy pomocy testera czy jest możliwe połączenie się najpierw z modułem mod.2 Traction, następnie z
modułem mod.5 Pump, potem z modułem mod.1 CAN IO, jeśli możliwe jest tylko połączenie z modułami 5 i 1, pro-
blem powinien być tylko w module mod.2 Traction.
2_Sprawdź cyfrowym testerem połączenia can bus przy wyłączonej stacyjce i dołączonych wszystkich przewodach.
Umieść tester na pinach 13A i 3A modułu EPS lub bezpośrednio na module trakcyjnym między pinami 1C i 3C;
oporność powinna być 60. Jeśli rezystancja wynosi ok. 120, linia nie jest w pełni dołączona. Wykonaj pomiary
bez zdejmowania jakichkolwiek konektorów.
3_ Jeśli alarm nie ustępuje, wymień moduł.
CAN BUS KO PU
Okresowe komunikaty z modu-
łu pompy mod.5 AC2P Pump
nie przychodzą na czas.
Wszystkie funkcje wózka
są wstrzymane.
1_Sprawdź przy pomocy testera czy jest możliwe połączenie się najpierw z modułem mod.5 Pump, następnie z
modułem mod.1 CAN IO, jeśli możliwe jest tylko połączenie z modułem 1, problem powinien być tylko w module
pompy, mod.5 Pump.
2_Sprawdź cyfrowym testerem połączenia can bus przy wyłączonej stacyjce i dołączonych wszystkich przewodach.
Umieść tester na pinach 13A i 3A modułu EPS lub bezpośrednio na module trakcyjnym między pinami 1C i 3C;
oporność powinna być 60. Jeśli rezystancja wynosi ok. 120, linia nie jest w pełni dołączona. Wykonaj pomiary
bez zdejmowania jakichkolwiek konektorów.
3_ Jeśli alarm nie ustępuje, wymień moduł.
CAN BUS KO VALVE
Okresowe komunikaty z modu-
łu mod.9 Mhyrio nie przycho-
dzą na czas.
Wszystkie funkcje wózka
są wstrzymane.
1_Sprawdź przy pomocy testera czy jest możliwe połączenie się najpierw z modułem mod.9 Mhyrio, następnie z
modułem mod.2 Traction, jeśli możliwe jest tylko połączenie z modułem 1, problem powinien być tylko w module
mod.9 Mhyrio.
2_Sprawdź cyfrowym testerem połączenia can bus przy wyłączonej stacyjce i dołączonych wszystkich przewodach.
Umieść tester na pinach 13A i 3A modułu EPS lub bezpośrednio na module Mhyrio między pinami 4B i 1B; opor-
ność powinna być 60. Jeśli rezystancja wynosi ok. 120, linia nie jest w pełni dołączona. Wykonaj pomiary bez
zdejmowania jakichkolwiek konektorów.
3_ Jeśli alarm nie ustępuje, wymień moduł.
CAN BUS KO JOY
Okresowe komunikaty z joy-
sticka nie przychodzą na czas
do modułu 1 CAN IO.
Dostępne są tylko funkcje kierowania.
1_Sprawdź przy pomocy testera czy jest możliwe połączenie się z wszystkimi modułami.
2_Sprawdź połączenia z CAN IO do joysticka.
2_Sprawdź cyfrowym testerem połączenia can bus przy wyłączonej stacyjce i dołączonych wszystkich przewodach.
Umieść tester między pinami „can low” i „can high” wszystkich modułów, oporność powinna być 60. Jeśli rezy-
stancja wynosi ok. 120, linia nie jest w pełni dołączona. Wykonaj pomiary bez zdejmowania jakichkolwiek konek-
torów.
3_ Jeśli alarm nie ustępuje, wymień moduł.
3
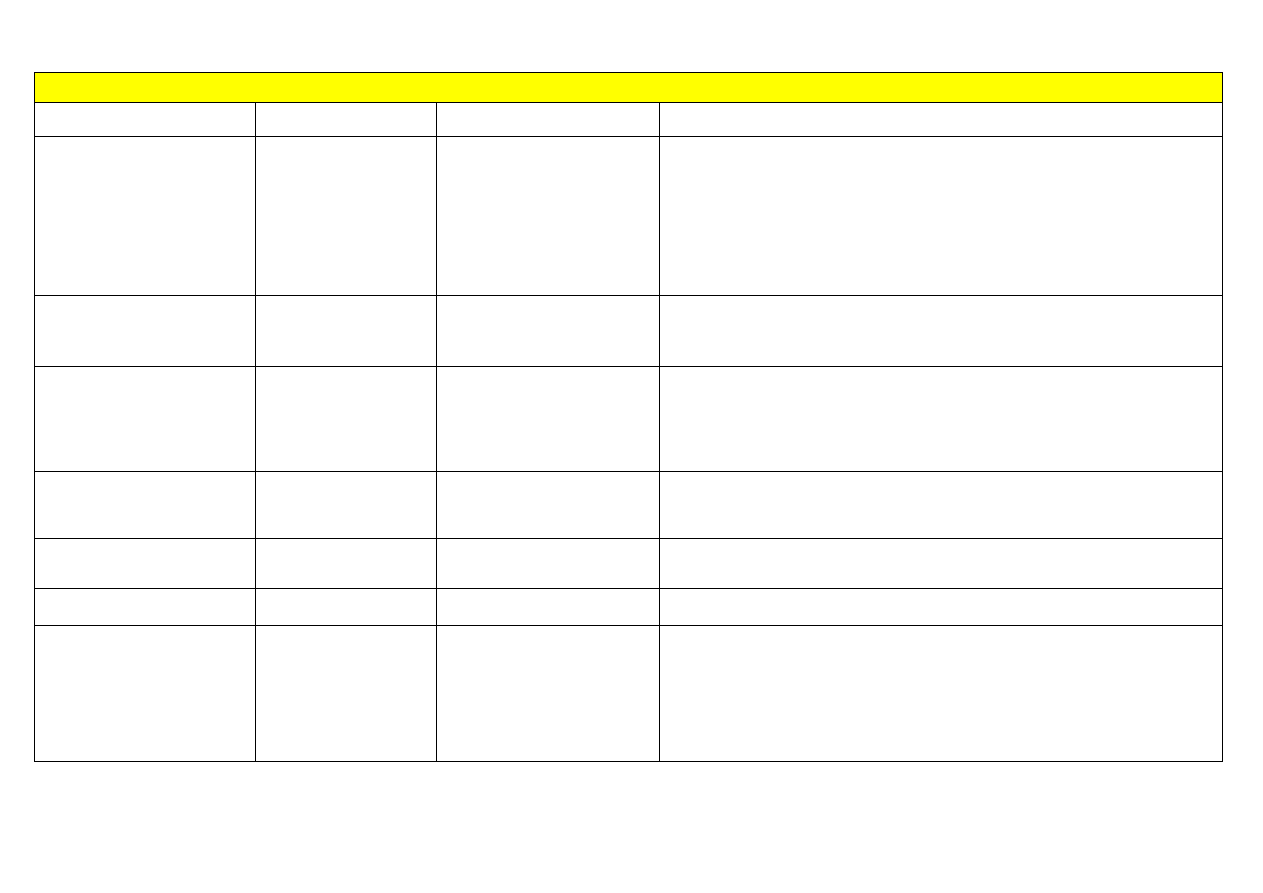
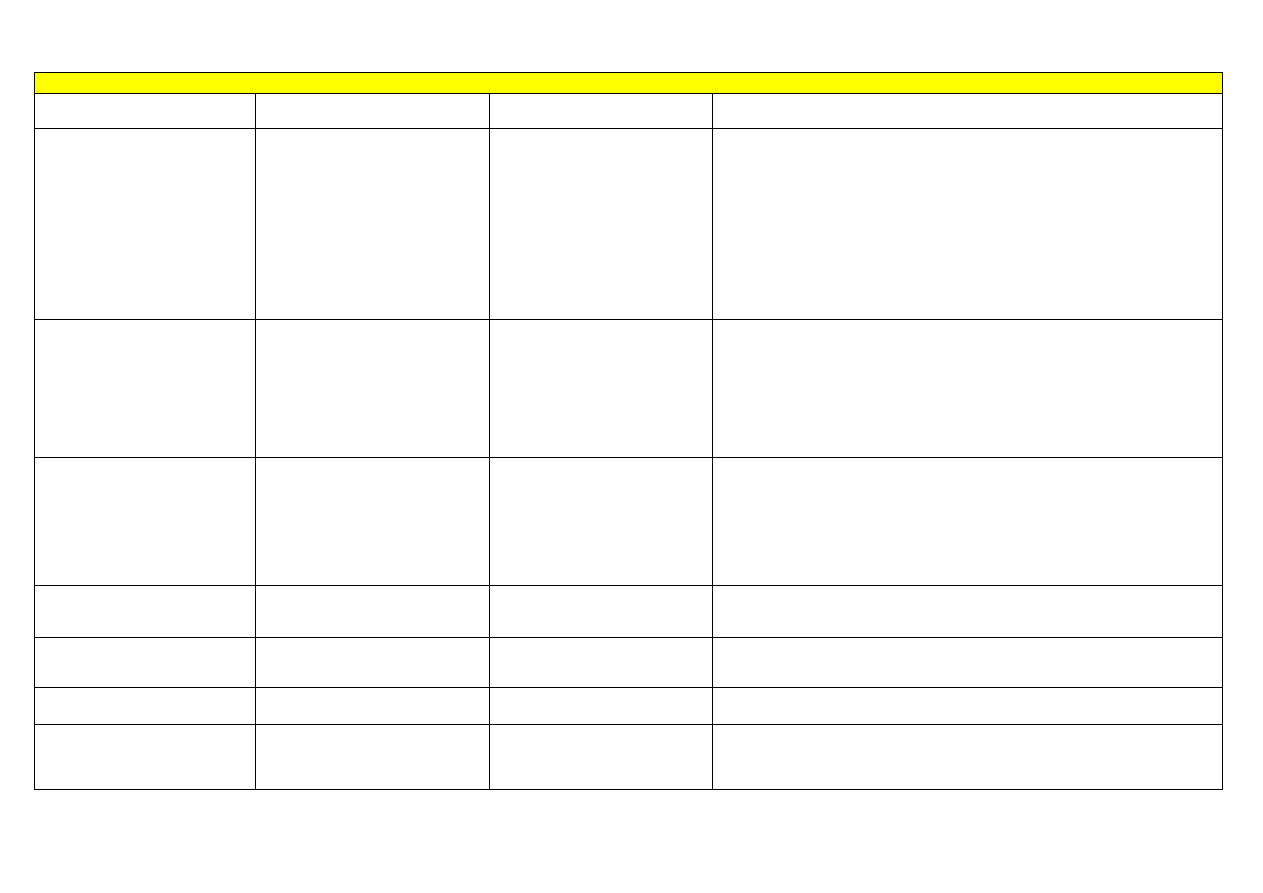
Moduł 1 CAN IO
EPROM NA3.04
Alarm generowany i czytany z modułu
1 CAN IO EPROM NA3.04
Opis alarmu
Zachowanie wózka przy włączonej
stacyjce lub podczas pracy
Postępowanie
CAN BUS KO EPS
Okresowe komunikaty z modu-
łu mod.6 EPS nie przychodzą
na czas.
Wszystkie funkcje wózka są wstrzy-
mane.
1_Sprawdź linię Can Bus z modułu EPS, jeśli to nie jest możliwe dołącz konsolę do innego modułu.
2_Dołącz tester bezpośrednio do modułu MHYRIO, spróbuj obejrzeć z MHYRIO moduły mod.5 Pump i mod.1 CAN
IO. Jeśli możliwe jest obejrzenie modułu pompy lecz nie można obejrzeć modułu CAN IO, usterka jest w module
EPS.
3_Sprawdź cyfrowym testerem połączenia can bus przy wyłączonej stacyjce i dołączonych wszystkich przewodach.
Umieść tester między pinami „can low” i „can high” wszystkich modułów, oporność powinna być 60. Jeśli rezy-
stancja wynosi ok. 120, linia nie jest w pełni dołączona. Wykonaj pomiary bez zdejmowania jakichkolwiek konek-
torów.
3_ Jeśli alarm nie ustępuje, wymień moduł EPS.
CHECK UP NEEDED
Jest to ostrzeżenie. To jest
informacja, że nadszedł czas
na planowany serwis. Ten
alarm pojawi się, gdy parametr
CHECK UP DONE w module
CAN IO jest ustawiony na ON.
Wszystkie funkcje wózka są wstrzy-
mane.
1_Dołącz tester do modułu 1 CAN IO i zmień parametr CHECK UP DONE na OFF.
EEPROM KO
Wewnętrzny błąd pamięci
gdzie są przechowywane
zmienne wartości parametrów.
Wszystkie funkcje wózka są wstrzy-
mane.
1_Wyłącz i włącz kluczykiem ponownie wózek.
2_Jeśli alarm zniknie po wyłączeniu i ponownym załączeniu wózka, możliwe jest że uprzednio zapamiętane spersona-
lizowane parametry zostały zastąpione przez wartości domyślne.
3_ Jeśli alarm nie ustępuje, wymień moduł.
BATTERY OUT
Bateria nie znajduje się na
swym miejscu
Funkcja podnoszenia jest wstrzyma-
na, dozwolone są tylko funkcje się-
gania (do wysuwu baterii), trakcja ze
zmniejszoną prędkością (przycisk na
pulpicie) i funkcje kierowania.
1_Sprawdź do odczepiania baterii nie został przypadkowo naciśnięty i czy bateria i jej zatrzask są na miejscu.
2_Sprawdź, czy LED na czujniku obecności baterii świeci gdy bateria jest na miejscu. W przeciwnym razie wymień
czujnik.
3_Używając testera dołączonego do modułu CAN IO, sprawdź wejście cyfrowe modułu w parametrze DIGITAL INPUT
#3.
4_Sprawdź połączenie czujnika indukcyjnego na pinie 9A (wejście cyfrowe) modułu CAN IO. Sprawdź także zasilanie
czujnika (powinno być 48V), sprawdź napięcie bezpośrednio na niebieskim i brązowym przewodzie konektora czuj-
nika.
5_ Jeśli alarm nie ustępuje, wymień moduł CAN IO.
FORW+BACK
Sygnały cyfrowe wejściowe
jazdy do przodu i jazdy wstecz
dotarły do modułu równocze-
śnie. Ten alarm nie pojawia się
w wózkach z jednym joystic-
kiem.
Trakcja jest wstrzymana, funkcje
hydrauliczne i kierowania są dozwo-
lone.
1a_Sprawdź, czy czujniki kierunku jazdy (jeśli występują) zamocowane do pedału przyspieszenia nie są mechanicznie
zablokowane.
1b_Sprawdź czy przełącznik kierunku jazdy (jeśli występuje) działa prawidłowo.
2_Sprawdź status wejść z czujników kierunku lub przełączaj używając testera w funkcji „Tester Function” dołączonego
do modułu CAN IO (parametry FORWARD SWITCH i BACKWARD SWITCH).
3_Korzystając ze schematów elektrycznych sprawdź połączenia elektryczne z przełączników kierunku (SW12 FWD,
SW13 BKWD) do modułu (piny 3G i 4G modułu CAN IO).
4_Sprawdź czy między pinami 20A i 8A modułu CAN IO nie występuje zworka.
5_Sprawdź testerem czy przełączniki są zasilane 48V.
6_Jeśli alarmy pozostają, wymień przełączniki kierunku.
4
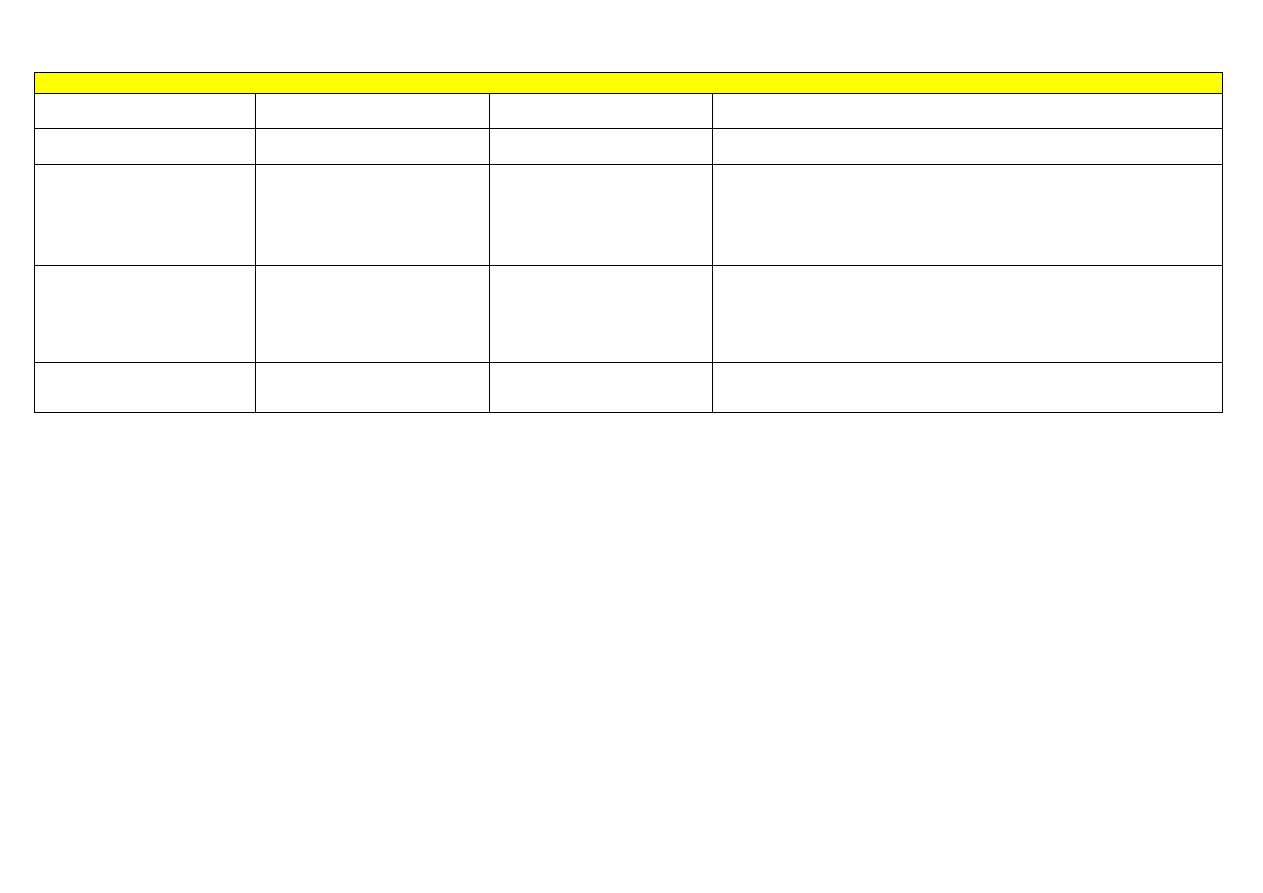
Moduł 1 CAN IO
EPROM NA3.04
Alarm generowany i czytany z modułu
1 CAN IO EPROM NA3.04
Opis alarmu
Zachowanie wózka przy włączonej
stacyjce lub podczas pracy
Postępowanie
INCORRECT START
Żądania dla funkcji trakcji lub
pomp były już obecne przy
włączonej stacyjce (operacje
żądane przed naciśnięciem
przycisku obecności operato-
ra).
Wszystkie funkcje wózka są wstrzy-
mane.
PRAWIDŁOWA SEKWENCJA STARTOWA:
Trakcja:
A) Stacyjka
B) Przycisk obecności operatora
C) Kierunek FWD i BACK
D) Przyspieszanie.
Hydraulika:
A) Stacyjka
B) Przycisk obecności operatora (z kontrolą upływu czasu funkcji hydraulicznych)
C) Funkcja hydrauliczna
1_Sprawdź, czy została zachowana poprawna sekwencja startu.
2_Sprawdź, czy przycisk obecności operatora jest prawidłowo zamocowany pod płytą podłogową.
3_Sprawdź, czy świeci LED na czujniku obecności operatora po jego włączeniu.
4_Dołącz tester z funkcją testowania do modułu CAN IO, sprawdź, czy status parametru DEAD SWITCH zmienia się
podczas aktywacji czujnika.
5_Korzystając ze schematów elektrycznych i testera sprawdź, czy czujnik jest zasilany napięciem 48V (pin 5G CAN
IO).
6_Jeśli alarm pozostaje, wymień czujnik.
POWER FAILURE #1
Zwarcie na jednym z wyjść
modułu, alarmu cofania lub
klaksonu.
1_Korzystając ze schematów elektrycznych sprawdź czy połączenia buczka cofania i klaksonu, które są dołączone do
CAN IO.
Klakson jest dołączony do pinów 10G (+48V) i 8G (wyjście wzmacniacza mosfet od +48 -->0).
Buczek cofania (jeśli jest na wyposażeniu) jest dołączony do piny 16G (+48V) i 7G (wyjście wzmacniacza mosfet
od +48 --> 0)
2_Sprawdź testerem i bez uruchamiania funkcji:
Między –batt i pinem 10G = 48V
Między –batt i pinem 8G = 48V
Między –batt i pinem 16G = 48V (jeśli jest zainstalowany opcyjny buczek cofania)
Między –batt i pinem 7G = 48V (jeśli jest zainstalowany opcyjny buczek cofania)
3_Dołącz tester cyfrowy do –batt i 8G, wciśnij przycisk klaksonu i sprawdź, czy wyjście spadnie z poziomu 48V do
poziomu 0V. Wykonaj taki sam test dla buczka cofania, jeśli jest zainstalowany, łącząc się do –batt i 7G.
4_Przy wyłączonym wózku (stacyjka wyłączona) sprawdź cyfrowym testerem oporność klaksonu (powinna wynosić
ok. 14).
5_ Przy wyłączonym wózku (stacyjka wyłączona) sprawdź cyfrowym testerem oporność buczka cofania, jeśli jest
zainstalowany (powinna wynosić ok. 18).
6_ Jeśli alarm pozostaje, wymień moduł.
5
Moduł 1 CAN IO
EPROM NA3.04
Alarm generowany i czytany z modułu
1 CAN IO EPROM NA3.04
Opis alarmu
Zachowanie wózka przy włączonej
stacyjce lub podczas pracy
Postępowanie
EMERGENCY
Wciśnięty przycisk wyłą-
czania awaryjnego, styk
pomocniczy otwarty.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź czy jest wciśnięty przycisk wyłączania awaryjnego.
2_Korzystając ze schematów elektrycznych (str. 14a, 14b, 14e sekcji elektrycznej podręcznika serwisowego) sprawdź
połączenia wyłącznika awaryjnego z CAN IO i z modułem trakcji mod.2 AC2T, pin 6G, wejście CAN I/O, pin 2F
+48V na mod.2 AC2T, pin 8, wyjście mod.2 AC2T.
3_Korzystając ze schematów elektrycznych (strona 14a sekcji elektrycznej podręcznika serwisowego) sprawdź połą-
czenia zasilania do wyłącznika awaryjnego i bezpiecznik FU4, 10A.
4_Sprawdź testerem cyfrowym:
Między –batt i pinem 6G modułu mod.1CAN IO = 48V
Między –batt i pinem 2F modułu mod.2 AC2T = 48V
Między –batt i pinem 8F modułu AC2T = od +48V do 0V
Między –batt i bezpiecznikiem FU4 = 48V
Między –batt i stykiem mocy wyłącznika awaryjnego = 48V
Między –batt i cewką wyłącznika awaryjnego = 48V
5_ Przy wyłączonym wózku (stacyjka wyłączona) sprawdź cyfrowym testerem oporność cewki wyłącznika awaryjne-
go, (powinna wynosić ok. 17).
6
Moduł trakcyjny Mod. 2 AC2T
EPROM NA3.05
Alarm generowany i czytany z modułu
Mod. 2 AC2T EPROM NA3.05
Opis alarmu
Zachowanie wózka przy włączonej
stacyjce lub podczas pracy
Postępowanie
WATCH DOG
Wewnętrzny autotest sterownika
dał wynik negatywny.
Ten test jest wykonywany pod-
czas działania wózka i podczas
spoczynku.
1_Wyłącz wózek (stacyjka wyłączona) i włącz go ponownie (stacyjka załączona).
2_ Jeśli alarm pozostaje, wymień moduł.
EEPROM KO
Wewnętrzny błąd pamięci gdzie
są przechowywane zmienne
wartości parametrów.
Wszystkie funkcje wózka są wstrzyma-
ne.
1_Wyłącz i włącz kluczykiem ponownie wózek.
2_Jeśli alarm zniknie po wyłączeniu i ponownym załączeniu wózka, możliwe jest że uprzednio zapamiętane
spersonalizowane parametry zostały zastąpione przez wartości domyślne.
3_ Jeśli alarm nie ustępuje, wymień moduł.
LOGIC FAILURE #1
Ten alarm wskazuje, że zadziała-
ło zabezpieczenie wysoko /
niskonapięciowe
1_Wyłącz i włącz kluczykiem ponownie wózek.
2_ Jeśli alarm nie ustępuje, wymień moduł.
LOGIC FAILURE #2
Błąd w sekcji sprzętowej sterow-
nika, która sprawdza napięcia
fazowe.
1_Wymień moduł.
LOGIC FAILURE #3
Błąd w sekcji sprzętowej sterow-
nika, która zarządza ochroną
obwodów mocy.
1_Wymień moduł.
CHECK UP NEEDED
Jest to ostrzeżenie. To jest
informacja, że nadszedł czas na
planowany serwis. Ten alarm
pojawi się, gdy parametr CHECK
UP DONE w module CAN IO jest
ustawiony na ON.
Wszystkie funkcje wózka są wstrzyma-
ne.
1_Dołącz tester do modułu 1 CAN IO i zmień parametr CHECK UP DONE na OFF.
HANDBRAKE
Wózek wykrywa, że hamulec
postojowy jest włączony.
Funkcje trakcyjne są wstrzymane, lecz
funkcje kierowania i hydraulicznie nie
są wstrzymane.
1_Wciśnij przycisk ręcznego hamulca by go zwolnić.
2_Sprawdź, czy na ekranie widać załączanie i zwalnianie hamulca po wciśnięciu przycisku.
3_Przy pomocy przenośnego testera sprawdź w module 16 Sicos wejście cyfrowe HANDBRAKE.
4_Sprawdź czy ten przycisk nie jest zwarty, czy jego styki zamykają się tylko wtedy, gdy jest wciskany i czy
rozwierają się po zwolnieniu, czy wejście działa w logice „set / reset” (hamulec postojowy także będzie reseto-
wany przy wyłączeniu stacyjki)
5_Sprawdź połączenia na pinach 2A i 17A modułu 16 Sicos (schemat elektryczny na str. 14L podręcznika serwi-
sowego).
6_Sprawdź cyfrowym testerem:
Między –batt i pinem 17 A modułu 16 Sicos = +48V
Między –batt i pinem 2A modułu 16 Sicos = +48V (przy wciskanym przycisku)
7_Jeśli alarm pozostaje, wymień moduł.
7
Moduł trakcyjny Mod. 2 AC2T
EPROM NA3.05
Alarm generowany i czytany z modułu
Mod. 2 AC2T EPROM NA3.05
Opis alarmu
Zachowanie wózka przy włączo-
nej stacyjce lub podczas pracy
Postępowanie
CAPACITOR CHARGE
Przy załączonej stacyjce prze-
miennik częstotliwości próbuje
ładować kondensatory przez
opornik mocy RC i sprawdza, czy
kondensatory naładowały się w
pewnym, zaprogramowanym
przedziale czasu. Jeśli to nie
nastąpi, zostanie włączony alarm
a stycznik linii głównej nie za-
mknie się.
Wszystkie funkcje wózka są
wstrzymane.
1_Sprawdź przyłącza mocy silnika trakcji między fazami U, V, W.
2_Sprawdź uzwojenia silnika trakcji przy pomocy precyzyjnego testera cyfrowego.
3_Przy wyłączonej stacyjce sprawdź izolację względem masy wózka biegunów –batt i +batt zasilania.
4_Przy wyłączonej stacyjce odłącz zasilanie +batt modułu 6 EPS, włącz wózek; jeśli alarm zniknie i w module trakcyj-
nym zostanie wygenerowany alarm SAFETY, oznacza to, że problem musi być w module EPS lub w obwodzie
EPS.
5_Przy wyłączonej stacyjce odłącz dodatni biegun zasilania modułu 5 Pump i sprawdź, czy alarm znika po włączeniu
stacyjki. Jeśli znika, oznacza to, że problem jest w okablowaniu mocy tego modułu lub w silniku trakcji.
6_ Jeśli alarm pozostaje, wymień moduł.
VMN LOW
Test wykonany przez moduł
trakcyjny dał wynik ujemny. Ten
test sprawdza napięcie VB/2
(24V) wewnątrz modułu.
Wszystkie funkcje wózka są
wstrzymane.
1_Sprawdź okablowanie mocy tego modułu lub silnika trakcji.
2_Sprawdź izolację silnika trakcji.
3_ Jeśli alarm pozostaje, wymień moduł.
VMN HIGH
Test wykonany przez moduł
trakcyjny dał wynik ujemny. Ten
test sprawdza napięcie VB/2
(24V) wewnątrz modułu.
Wszystkie funkcje wózka są
wstrzymane.
1_Sprawdź okablowanie mocy tego modułu lub silnika trakcji.
2_Sprawdź izolację silnika trakcji.
3_ Jeśli alarm pozostaje, wymień moduł.
STBY I HIGH
Test jest wykonywany w stanie
gotowości. Stwierdzony prąd
zerowy na wewnętrznym czujniku
modułu.
Wszystkie funkcje wózka są
wstrzymane.
1_Sprawdź okablowanie mocy tego modułu lub silnika trakcji.
2_Sprawdź izolację silnika trakcji.
3_ Jeśli alarm pozostaje, wymień moduł.
COIL SHORTED
Jedno lub dwa wyjścia modułu są
zwarte.
Wszystkie funkcje wózka są
wstrzymane.
1_Sprawdź połączenia odłączając czujnik obecności operatora.
2_Sprawdź czy rezystancja cewki stycznika linii głównej wynosi ok. 18.
3_ Sprawdź czy rezystancja cewki hamulca elektromagnetycznego wynosi ok. 12.
4_Sprawdź wyjście sterujące cewka stycznika linii głównej:
Między –batt i pinem 2F = 48V
Między –batt i pinem 8F = 48V Między 2F i 8F = 0V
5_Sprawdź wyjście sterujące hamulcem elektromagnetycznym:
Między –batt i pinem 3F = 48V
Między –batt i pinem 9F = 48V
6_ Jeśli alarm pozostaje, wymień moduł.
DRIVER SHORTED
Moduł wykrył zwarcie sterownika
sterującego stycznikiem linii
głównej.
1_Sprawdź połączenia odłączając czujnik obecności operatora.
2_Sprawdź czy rezystancja cewki stycznika linii głównej wynosi ok. 18.
3_ Sprawdź czy rezystancja cewki hamulca elektromagnetycznego wynosi ok. 12.
4_Sprawdź wyjście sterujące cewka stycznika linii głównej:
Między –batt i pinem 2F = 48V
Między –batt i pinem 8F = 48V Między 2F i 8F = 0V
5_Sprawdź wyjście sterujące hamulcem elektromagnetycznym:
Między –batt i pinem 3F = 48V
Między –batt i pinem 9F = 48V
6_ Jeśli alarm pozostaje, wymień moduł.
8
Moduł trakcyjny Mod. 2 AC2T
EPROM NA3.05
Alarm generowany i czytany z modułu
Mod. 2 AC2T EPROM NA3.05
Opis alarmu
Zachowanie wózka przy włączonej
stacyjce lub podczas pracy
Postępowanie
CONTACTOR DRIVER
Po zakończeniu wstępnej dia-
gnostyki sterownik trakcji zamyka
stycznik linii głównej i sprawdza
napięcie drenu sterownika. Jeśli
sterownik był zaprogramowany
na sterowanie cewką stycznika w
trybie PWM na poziomie 50%, na
wejściu musi być ok. 2.5V. Jeśli
ta wartość jest inna, generowany
jest alarm.
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_ Jeśli alarm pozostaje, wymień moduł.
CONTACTOR OPEN
Moduł trakcyjny nie wykrywa
napięcia zasilania nawet przy
zamkniętym styczniku linii głów-
nej.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź połączenia.
2_Sprawdź czy oporność cewki stycznika linii głównej wynosi ok. 18.
3_Sprawdź, czy bateria jest w pełni naładowana.
4_ Jeśli alarm pozostaje, wymień moduł.
AUX OUTPUT KO
Mikroprocesor kontroluje sterow-
nik hamulca elektromagnetycz-
nego. Alarm jest generowany,
jeśli stan wyjścia sterownika nie
odpowiada sygnałowi z mikro-
procesora.
1_Sprawdź połączenia hamulca elektromagnetycznego, pin 3F (+48V) i 9F (wyjście mosfet od +48 do 0V).
2_Sprawdź testerem cyfrowym:
Między –batt i pinem 3F = 48V (zawsze)
Między –batt i pinem 9F = 48V (gdy hamulec jest włączony)
Między pinem 3F i 9F = 0V
3_ Jeśli alarm pozostaje, wymień moduł trakcyjny.
HIGH TEMPERATURE
Temperatura modułu przekracza
75C. Maksymalny prąd jest
zmniejszany proporcjonalnie do
wzrostu temperatury do 100C.
Gdy temperatura modułu osiągnie 100C,
wszystkie funkcje wózka są wstrzymane.
1_Sprawdź, czy alarm jest generowany także przy zimnym module.
2_ Jeśli alarm pozostaje, wymień moduł.
MOTOR TEMPERATURE
Moduł otrzymał sygnał analogo-
wy z czujnika temperatury silnika,
że temperatura jest krytyczna.
Wózek działa normalnie oprócz prób
redukcji prędkości trakcyjnej.
1_Sprawdź połączenia czujnika temperatury między czujnikiem i modułem, pin 6F i 12F.
2_Jeśli alarm pozostaje nawet przy zimnym silniku, wymień moduł.
THERMIC SENSOR KO
Usterka wewnętrznego czujnika
temperatury modułu
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_ Jeśli alarm pozostaje, wymień moduł.
WAITING FOR NODE
Moduł trakcyjny nie może za-
mknąć stycznika linii głównej z
powodu usterki jednego z innych
modułów dołączonych do szyny
can bus.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź przenośnym testerem, który moduł wysyła alarm.
2_Sprawdź połączenie na pinie 1F modułu CAN IO.
3_Sprawdź połączenie na konektorze C modułu pompy.
4_Sprawdź połączenie na pinie 13A modułu EPS.
5_Sprawdź czy wyłącznik awaryjny działa prawidłowo, sprawdź połączenia stycznika pomocniczego stycznika
linii głównej.
6_Sprawdź styki stycznika linii głównej.
7_Sprawdź połączenia na konektorze szyny can bus modułu trakcyjnego, pin 1 – 2 – 3 – 4C.
9
Moduł trakcyjny Mod. 2 AC2T
EPROM NA3.05
Alarm generowany i czytany z modułu
Mod. 2 AC2T EPROM NA3.05
Opis alarmu
Zachowanie wózka przy włączonej sta-
cyjce lub podczas pracy
Postępowanie
CAN BUS KO
Ten alarm wskazuje, że moduł nie
odebrał sygnału z linii Can bus.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź przenośnym testerem, czy można połączyć się z wszystkimi modułami.
2_Sprawdź połączenia can bus cyfrowym testerem przy wyłączonej stacyjce i dołączonych wszystkich
przewodach. Dołącz tester do pinów 13A i 3A modułu EPS lub bezpośrednio do modułu trakcyjnego
między piny 1C i 3C; oporność powinna wynosić ok. 60, jeśli rezystancja wynosi 120, linia nie jest
całkowicie dołączona. Wykonaj pomiary bez zdejmowania konektorów.
3_Jeśli alarm pozostaje, wymień moduł.
BATTERY LOW
Jeśli jest ustawiona opcja „Battery
Check”, wykonywany jest algorytm
rozładowania. Gdy poziom nałado-
wania osiąga ok. 20%, generowany
jest alarm i prąd redukowany do
50% zaprogramowanego poziomu.
Jedyne dostępne funkcje wózka to sięganie
nośnika do przodu / wstecz a prędkość
jazdy jest zredukowana by umożliwić wóz-
kowi dotarcie do stacji ładowania baterii.
Zaprogramowany prąd jest zredukowany do
50%.
1_Sprawdź poziom naładowania baterii miernikiem gęstości elektrolitu.
ENCODER ERROR
Ten alarm jest generowany jeśli
wejście enkodera znacząco „ska-
cze” (20Hz w ciągu 32 ms)
Wszystkie funkcje wózka są wstrzymane.
1_Wyłącz i włącz ponownie wózek (stacyjkę) i sprawdź, czy alarm znikł.
2_Oczyść enkoder i jego okolicę (brud może wniknąć do środka).
3_Sprawdź połączenia elektryczne enkodera korzystając ze schematów elektrycznych. Enkoder jest dołą-
czony do pinów 1 – 2 – 3 – 5D modułu trakcyjnego 2.
4_Przy odłączonym enkoderze sprawdź, czy między pinami 1D i 2D modułu trakcyjnego jest napięcie 12V
(zasilanie enkodera).
5_Dołącz przenośny tester do modułu trakcyjnego 2, sprawdź funkcją testera (parametr ENCODER) czę-
stotliwość generowaną przez enkoder.
6_ Jeśli alarm pozostaje, wymień moduł.
SAFETY
Ten alarm jest generowany, gdy
wejście bezpieczeństwa jest otwar-
te. To wejście bezpieczeństwa jest
dołączone do modułu EPS, zatem
możliwa jest usterka w module
EPS.
Wszystkie funkcje wózka są wstrzymane.
1_Dołącz przenośny tester do modułu EPS i sprawdź, które alarmy występują.
2_Wykonaj wynikające z tego wykrywanie / usuwanie usterek w module EPS.
3_Sprawdź połączenia między pinami 7B i 1B modułu EPS i pinami 5F i 11F modułu trakcyjnego.
4_Sprawdź czy alarm znika po odłączeniu enkodera silnika trakcyjnego; jeśli tak jest, jest zwarcice w
enkoderze, powodujące alarm.
5_ Jeśli alarm pozostaje, wymień moduł.
SAFETY KO
Ten alarm jest generowany gdy
wejście bezpieczeństwa zamyka
się przed wejściem bezpieczeń-
stwa modułu EPS.
Wszystkie funkcje wózka są wstrzymane.
1_Dołącz przenośny tester do modułu EPS i sprawdź, które alarmy występują.
2_Wykonaj wynikające z tego wykrywanie / usuwanie usterek w module EPS.
3_Sprawdź połączenia między pinami 7B i 1B modułu EPS i pinami 5F i 11F modułu trakcyjnego.
4_Sprawdź czy alarm znika po odłączeniu enkodera silnika trakcyjnego; jeśli tak jest, jest zwarcice w
enkoderze, powodujące alarm.
5_ Jeśli alarm pozostaje, wymień moduł.
WRONG SET BATTERY
Parametry ADJUST BATTERY i
SET BATTERY TYPE w module
trakcyjnym zostały ustawione
nieprawidłowo.
Podczas załączania wózka nie następuje
autocentrowanie koła napędowego, wszyst-
kie funkcje wózka są wstrzymane.
1_Sprawdź czy parametr Battery Type (w menu ADJUSTMENT) jest poprawny, powinien być 48V, jeśli
dołączona jest bateria 48V.
2_Sprawdź czy parametr Adjustment Battery (w menu ADJUSTMENT) jest poprawny, sprawdź testerem,
czy odpowiada rzeczywistemu napięciu baterii.
CHOPPER NOT OK
Oprogramowanie zainstalowane w
pamięci eprom nie odpowiada
zainstalowanej części sprzętowej
systemu.
Wszystkie funkcje wózka są wstrzymane.
1_Wymień moduł.
10
Moduł pompy Mod.5 AC2B Pump EPROM NA 3.05
Alarm generowany i czytany z modułu
Mod.5 AC2P Pump EPROM NA 3.05
Opis alarmu
Zachowanie wózka przy włączonej sta-
cyjce lub podczas pracy
Postępowanie
WATCH DOG
Wewnętrzny autotest sterownika dał
wynik negatywny.
Ten test jest wykonywany podczas
działania wózka i podczas spoczynku.
1_Wyłącz wózek (stacyjka wyłączona) i włącz go ponownie (stacyjka załączona).
2_ Jeśli alarm pozostaje, wymień moduł.
EEPROM KO
Wewnętrzny błąd pamięci gdzie są
przechowywane zmienne wartości
parametrów.
Wszystkie funkcje wózka są wstrzymane.
1_Wyłącz i włącz kluczykiem ponownie wózek.
2_Jeśli alarm zniknie po wyłączeniu i ponownym załączeniu wózka, możliwe jest że uprzednio zapa-
miętane spersonalizowane parametry zostały zastąpione przez wartości domyślne.
3_ Jeśli alarm nie ustępuje, wymień moduł.
LOGIC FAILURE #1
Ten alarm wskazuje, że zadziałało
zabezpieczenie wysoko / niskonapię-
ciowe
1_Wyłącz i włącz kluczykiem ponownie wózek.
2_ Jeśli alarm nie ustępuje, wymień moduł.
LOGIC FAILURE #2
Błąd w sekcji sprzętowej sterownika,
która sprawdza napięcia fazowe.
1_Wymień moduł.
LOGIC FAILURE #3
Błąd w sekcji sprzętowej sterownika,
która zarządza ochroną obwodów
mocy.
1_Wymień moduł.
CHECK UP NEEDED
Jest to ostrzeżenie. To jest informacja,
że nadszedł czas na planowany serwis.
Ten alarm pojawi się, gdy parametr
CHECK UP DONE w module CAN IO
jest ustawiony na ON.
Wszystkie funkcje wózka są wstrzymane.
1_Dołącz tester do modułu 1 CAN IO i zmień parametr CHECK UP DONE na OFF.
CAPACITOR CHARGE
Przy załączonej stacyjce przemiennik
częstotliwości próbuje ładować konden-
satory przez opornik mocy RC i spraw-
dza, czy kondensatory naładowały się
w pewnym, zaprogramowanym prze-
dziale czasu. Jeśli to nie nastąpi, zo-
stanie włączony alarm a stycznik linii
głównej nie zamknie się.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź przyłącza mocy silnika trakcji między fazami U, V, W.
2_Sprawdź uzwojenia silnika trakcji przy pomocy precyzyjnego testera cyfrowego.
3_Przy wyłączonej stacyjce sprawdź izolację względem masy wózka biegunów –batt i +batt zasilania.
4_Przy wyłączonej stacyjce odłącz zasilanie +batt modułu 6 EPS, włącz wózek; jeśli alarm zniknie i w
module trakcyjnym zostanie wygenerowany alarm SAFETY, oznacza to, że problem musi być w
module EPS lub w obwodzie EPS.
5_Przy wyłączonej stacyjce odłącz dodatni biegun zasilania modułu 5 Pump i sprawdź, czy alarm znika
po włączeniu stacyjki. Jeśli znika, oznacza to, że problem jest w okablowaniu mocy tego modułu lub
w silniku trakcji.
6_ Jeśli alarm pozostaje, wymień moduł.
VMN LOW
Test wykonany przez moduł pompy dał
wynik ujemny. Ten test sprawdza
napięcie VB/2 (24V) wewnątrz modułu.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź okablowanie mocy tego modułu lub silnika trakcji.
2_Sprawdź izolację silnika trakcji.
3_ Jeśli alarm pozostaje, wymień moduł.
VMN HIGH
Test wykonany przez moduł pompy dał
wynik ujemny. Ten test sprawdza
napięcie VB/2 (24V) wewnątrz modułu.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź okablowanie mocy tego modułu lub silnika trakcji.
2_Sprawdź izolację silnika trakcji.
3_ Jeśli alarm pozostaje, wymień moduł.
STDBY I HIGH
Test jest wykonywany w stanie gotowo-
ści. Stwierdzony prąd zerowy na we-
wnętrznym czujniku modułu.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź okablowanie mocy tego modułu lub silnika trakcji.
2_Sprawdź izolację silnika trakcji.
3_ Jeśli alarm pozostaje, wymień moduł.
11
Moduł pompy Mod.5 AC2B Pump EPROM NA 3.05
Alarm generowany i czytany z modułu
Mod.5 AC2P Pump EPROM NA 3.05
Opis alarmu
Zachowanie wózka przy włączonej
stacyjce lub podczas pracy
Postępowanie
COIL SHORTED
Jedno lub dwa wyjścia modułu są zwarte.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź połączenia odłączając czujnik obecności operatora.
2_Sprawdź czy rezystancja cewki stycznika linii głównej wynosi ok. 18.
3_ Sprawdź czy rezystancja cewki hamulca elektromagnetycznego wynosi ok. 12.
4_Sprawdź wyjście sterujące cewka stycznika linii głównej:
Między –batt i pinem 2F = 48V
Między –batt i pinem 8F = 48V
Między 2F i 8F = 0V
5_Sprawdź wyjście sterujące hamulcem elektromagnetycznym:
Między –batt i pinem 3F = 48V
Między –batt i pinem 9F = 48V
6_ Jeśli alarm pozostaje, wymień moduł.
DRIVER SHORTED
Moduł wykrył zwarcie sterownika sterujące-
go obrotową lampą sygnałową.
1_Sprawdź wyjście sterujące obrotową lampą sygnałową.
Między –batt i pinem 2F = 48V
Między –batt i pinem 8F = 48V
Między 2F i 8F = 0V
2_Sprawdź wyjście sterujące wentylatorem chłodzenia silnika pompy:
Między –batt i pinem 3F = 48V
Między –batt i pinem 9F = 48V
3_ Jeśli alarm pozostaje, wymień moduł.
CONTACTOR DRIVER
Po zakończeniu wstępnej diagnostyki
sterownik trakcji zamyka stycznik linii głów-
nej i sprawdza napięcie drenu sterownika.
Jeśli sterownik był zaprogramowany na
sterowanie cewką stycznika w trybie PWM
na poziomie 50%, na wejściu musi być ok.
2.5V. Jeśli ta wartość jest inna, generowany
jest alarm.
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_ Jeśli alarm pozostaje, wymień moduł.
HIGH TEMPERATURE
Temperatura modułu przekracza 75C.
Maksymalny prąd jest zmniejszany propor-
cjonalnie do wzrostu temperatury do 100C.
Gdy temperatura modułu osiągnie 100C,
wszystkie funkcje wózka są wstrzymane.
1_Sprawdź, czy alarm jest generowany także przy zimnym module.
2_ Jeśli alarm pozostaje, wymień moduł.
MOTOR TEMPERATURE
Moduł otrzymał sygnał analogowy z czujni-
ka temperatury silnika, że temperatura jest
krytyczna.
Wózek działa normalnie.
1_Sprawdź połączenia czujnika temperatury między czujnikiem i modułem, pin 6F i 12F.
2_Jeśli alarm pozostaje nawet przy zimnym silniku, wymień moduł.
THERMIC SENSOR KO
Usterka wewnętrznego czujnika temperatu-
ry modułu
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_ Jeśli alarm pozostaje, wymień moduł.
AUX OUTPUT KO
Mikroprocesor kontroluje wentylator silnika
pompy (M2). Alarm jest generowany, jeśli
stan wyjścia sterownika nie odpowiada
sygnałowi z mikroprocesora.
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_ Jeśli alarm pozostaje, wymień moduł.
12
Moduł pompy Mod.5 AC2B Pump EPROM NA 3.05
Alarm generowany i czytany z modułu
Mod.5 AC2P Pump EPROM NA 3.05
Opis alarmu
Zachowanie wózka przy włączonej
stacyjce lub podczas pracy
Postępowanie
WAITING FOR TRAC
Moduł wykrył błąd i poinformował moduł
pompy przez szynę can bus.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź przenośnym testerem, który moduł jest w stanie alarmu.
2_Sprawdź wszystkie połączenia szyny.
CAN BUS KO
Ten alarm wskazuje, że moduł nie odebrał
sygnału z linii Can bus.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź przenośnym testerem, czy można połączyć się z wszystkimi modułami.
2_Sprawdź połączenia can bus cyfrowym testerem przy wyłączonej stacyjce i dołączonych wszyst-
kich przewodach. Dołącz tester do pinów 13A i 3A modułu EPS lub bezpośrednio do modułu
pompy między piny 1C i 3C; oporność powinna wynosić ok. 60, jeśli rezystancja wynosi 120,
linia nie jest całkowicie dołączona. Wykonaj pomiary bez zdejmowania konektorów.
3_Jeśli alarm pozostaje, wymień moduł.
BATTERY LOW
Jeśli jest ustawiona opcja „Battery Check”,
wykonywany jest algorytm rozładowania.
Gdy poziom naładowania osiąga ok. 20%,
generowany jest alarm i prąd redukowany
do 50% zaprogramowanego poziomu.
Jedyne dostępne funkcje wózka to sięga-
nie nośnika do przodu / wstecz a pręd-
kość jazdy jest zredukowana by umożliwić
wózkowi dotarcie do stacji ładowania
baterii. Zaprogramowany prąd jest zredu-
kowany do 50%.
1_Sprawdź poziom naładowania baterii miernikiem gęstości elektrolitu.
CHOPPER NOT OK
Oprogramowanie zainstalowane w pamięci
eprom nie odpowiada zainstalowanej części
sprzętowej systemu.
Wszystkie funkcje wózka są wstrzymane.
1_Wymień moduł.
13
Moduł Mod.6 EPS-AC
EPROM NA 3.07
Alarm generowany i czytany z modułu
mod.6 EPS EPROM NA3.07
Opis alarmu
Zachowanie wózka przy włączonej
stacyjce lub podczas pracy
Postępowanie
MICRO SLAVE KO
Główny mikroprocesor (MM) i mikroprocesor nadrzędny (SM)
ustawicznie porównują odczytywane instrukcje (tachoprądni-
ca, silnik krokowy, skok końcowy, automatyczne żądanie).
Gdy MM odczytuje wartość inną niż wartość czytana przez
SM, jest generowany alarm. Jeśli nie jest podana żadna
liczba, oznacza to, że główny mikroprocesor (MM) odebrał
sygnał z mikroprocesora nadrzędnego (SM), który nie zgadza
się z zaprogramowanymi wartościami instrukcji.
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_Sprawdź połączenia wszystkich konektorów i połączeń zasilania modułu EPS.
3_ Jeśli alarm pozostaje, wymień moduł.
MICRO SLAVE #1
Główny mikroprocesor (MM) generuje stały impuls synchroni-
zacji (co 16ms). Gdy mikroprocesor nadrzędny (SM) nie
odczytuje impulsu z MM przez czas przekraczający 100ms,
jest generowany alarm.
Wszystkie funkcje wózka są wstrzymane.
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_Sprawdź połączenia wszystkich konektorów i połączeń zasilania modułu EPS.
3_ Jeśli alarm pozostaje, wymień moduł.
MICRO SLAVE #2
Nadrzędny mikroprocesor (SM) wykrył że styki bezpieczeń-
stwa są zamknięte przed wysłaniem sygnału zamykania
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_Sprawdź połączenia wszystkich konektorów i połączeń zasilania modułu EPS.
3_ Jeśli alarm pozostaje, wymień moduł.
MICRO SLAVE #3
Nadrzędny mikroprocesor (SM) wykrył nieprawidłowy stan
sygnału analogowego z mikroprocesora głównego (MM)
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_Sprawdź połączenia wszystkich konektorów i połączeń zasilania modułu EPS.
3_ Jeśli alarm pozostaje, wymień moduł.
MICRO SLAVE #4
Nadrzędny mikroprocesor (SM) wykrył , że kierunek obrotów
silnika jest inny, niż kierunek, który był zadany (instrukcja i
działanie nie są zgodne)
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_Sprawdź połączenia wszystkich konektorów i połączeń zasilania modułu EPS.
3_ Jeśli alarm pozostaje, wymień moduł.
MICRO SLAVE #5
Nadrzędny mikroprocesor (SM) wykrył , że silnik nie działa
mimo wydanej instrukcji.
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_Sprawdź połączenia wszystkich konektorów i połączeń zasilania modułu EPS.
3_ Jeśli alarm pozostaje, wymień moduł.
MICRO SLAVE #6
Nadrzędny mikroprocesor (SM) wykrył , że kierunek obrotów
silnika jest inny, niż kierunek, obrotów silnika krokowego.
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_Sprawdź połączenia wszystkich konektorów i połączeń zasilania modułu EPS.
3_ Jeśli alarm pozostaje, wymień moduł.
MICRO SLAVE #7
Nadrzędny mikroprocesor (SM) otworzył swój styk bezpie-
czeństwa bez podawania przyczyny na szynę can bus. Ten
alarm może wystąpić np. w razie usterki lub braku SM.
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_Sprawdź połączenia wszystkich konektorów i połączeń zasilania modułu EPS.
3_ Jeśli alarm pozostaje, wymień moduł.
KM CLOSED
Główny mikroporcesor (MM) wykrył, że styk bezpieczeństwa
mikroprocesora nadrzędnego (SM) jest zamknięty po zadaniu
sygnału otwarcia
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_Sprawdź połączenia wszystkich konektorów i połączeń zasilania modułu EPS.
3_ Jeśli alarm pozostaje, wymień moduł.
KS CLOSED
Główny mikroporcesor (MM) wykrył, że styk bezpieczeństwa
mikroprocesora nadrzędnego (SM) jest zamknięty przed
wysłaniem sygnału.
Wszystkie funkcje wózka są wstrzymane.
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_Sprawdź połączenia wszystkich konektorów i połączeń zasilania modułu EPS (w
szczególności czy 1B i 7B nie są zamienione)
3_ Jeśli alarm pozostaje, wymień moduł.
KM OPEN
Główny mikroporcesor (MM) wykrył, że jego styk bezpieczeń-
stwa jest otwarty po zadaniu sygnału zamknięcia
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_Sprawdź połączenia wszystkich konektorów i połączeń zasilania modułu EPS.
3_ Jeśli alarm pozostaje, wymień moduł.
14
Moduł Mod.6 EPS EPROM NA 3.07
Alarm generowany i czytany z modułu
mod.6 EPS EPROM NA3.07
Opis alarmu
Zachowanie wózka przy włączonej stacyjce
lub podczas pracy
Postępowanie
KS OPEN
Główny mikroporcesor (MM) wykrył, że styk bezpie-
czeństwa mikroprocesora nadrzędnego (SM) jest
otwarty po zadaniu sygnału zamknięcia.
Wszystkie funkcje wózka są wstrzymane.
1_Wyłącz i ponownie włącz wózek (stacyjkę).
2_Sprawdź połączenia wszystkich konektorów i połączeń zasilania modułu EPS
3_ Jeśli założono nowy eprom, sprawdź czy jest włożony prawidłowo.
4_Jeśli alarm pozostaje, wymień moduł.
POWER FAILURE #1
Faza U silnika kierowania jest przerwana. Ten alarm
występuje, gdy prąd fazy jest mniejszy niż 6A a
częstotliwość zadawana jest różna od zera. Moduł
wykrywa przerwę w fazie U.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź połączenia fazy U między silnikiem i modułem.
2_Sprawdź testerem, czy rezystancja między fazami wynosi ok. 0.3 przy odłączonych
kablach silnika.
3_Sprawdź testerem izolację między fazami silnika i rama maszyny.
4_Jeśli alarm pozostaje, wymień moduł.
POWER FAILURE #2
Faza V silnika kierowania jest przerwana. Ten alarm
występuje, gdy prąd fazy jest mniejszy niż 6A a
częstotliwość zadawana jest różna od zera. Moduł
wykrywa przerwę w fazie U.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź połączenia fazy U między silnikiem i modułem.
2_Sprawdź testerem, czy rezystancja między fazami wynosi ok. 0.3 przy odłączonych
kablach silnika.
3_Sprawdź testerem izolację między fazami silnika i rama maszyny.
4_Jeśli alarm pozostaje, wymień moduł.
POWER FAILURE #3
Faza W silnika kierowania jest przerwana. Ten alarm
występuje, gdy prąd fazy jest mniejszy niż 6A a
częstotliwość zadawana jest różna od zera. Moduł
wykrywa przerwę w fazie U.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź połączenia fazy U między silnikiem i modułem.
2_Sprawdź testerem, czy rezystancja między fazami wynosi ok. 0.3 przy odłączonych
kablach silnika.
3_Sprawdź testerem izolację między fazami silnika i rama maszyny.
4_Jeśli alarm pozostaje, wymień moduł.
LOGIC FAILURE #1
Napięcie skuteczne między fazami U i V różni się od
wymaganej wartości.
1_Sprawdź połączenia między silnikiem i modułem.
2_Sprawdź testerem, czy rezystancja między fazami wynosi ok. 0.3 przy odłączonych
kablach silnika.
3_Sprawdź testerem izolację między fazami silnika i rama maszyny.
4_Jeśli alarm pozostaje, wymień moduł.
LOGIC FAILURE #2
Napięcie skuteczne między fazami U i W różni się od
wymaganej wartości.
1_Sprawdź połączenia między silnikiem i modułem.
2_Sprawdź testerem, czy rezystancja między fazami wynosi ok. 0.3 przy odłączonych
kablach silnika.
3_Sprawdź testerem izolację między fazami silnika i rama maszyny.
4_Jeśli alarm pozostaje, wymień moduł.
HIGH CORRENT
Sygnał z wyjściowych wzmacniaczy prądowych
przekracza Imax (nie jest kontrolowalny) przez czas
dłuższy niż 1 sekunda.
1_Sprawdź połączenia między silnikiem kierowania i modułem.
2_Sprawdź testerem, czy rezystancja między fazami wynosi ok. 0.3 przy odłączonych
kablach silnika.
3_Sprawdź testerem izolację między fazami silnika i rama maszyny.
4_Jeśli alarm pozostaje, wymień moduł.
MAIN CONTACTOR OPEN
Zdarza się podczas testu rozruchowego przy włą-
czaniu stacyjki z powodu synchronizacji szyny can
bus z modułem trakcyjnym gdy stycznik linii głównej
jest otwarty.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź przenośnym testerem czy w module trakcyjnym jest alarm. Jeśli jest, postę-
puj według wskazówek szukania / usuwania uszkodzeń dla tego alarmu.
2_Sprawdź czy parametr Micro Check (w menu Special Adjustnmeent) został nieprawi-
dłowo ustawiony na ABSENT zamiast na PRESENT i zmień jeśli tak jest.
3_Sprawdź połączenia wyjścia bezpieczeństwa w module EPS, piny 7B i 1B.
4_Jeśli alarm pozostaje, wymień moduł.
15
Moduł Mod.6 EPS-AC
EPROM NA 3.07
Alarm generowany i czytany z modułu
mod.6 EPS EPROM NA3.07
Opis alarmu
Zachowanie wózka przy włączonej stacyjce
lub podczas pracy
Postępowanie
KEY OFF
Moduł Sicos wysłał sygnał przez szynę can bus, że
kluczyk w stacyjce jest w położeniu OFF.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź, czy jest wciśnięty przycisk wyłączania awaryjnego.
2_Sprawdź ręcznym testerem czy w innych modułach są inne alarmy.
3_Sprawdź cyfrowym testerem połączenia can bus podczas wyłączenia stacyjki i przy
wszystkich przewodach dołączonych. Dołącz tester do pinów 13A i 3A modułu EPS
lub bezpośrednio w trakcyjnym module między piny 1C i 3C; oporność powinna wy-
nosić ok. 60. Jeśli wynosi ok. 120, linia nie jest całkowicie połączona. Wykonaj
pomiary bez zdejmowania jakichkolwiek konektorów.
4_Jeśli alarm pozostaje, wymień moduł.
CAN BUS KO
Ten alarm wskazuje, że moduł nie odebrał sygnału z
linii Can bus.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź przenośnym testerem, czy można połączyć się z wszystkimi modułami.
2_Sprawdź połączenia can bus cyfrowym testerem przy wyłączonej stacyjce i dołączo-
nych wszystkich przewodach. Dołącz tester do pinów 13A i 3A modułu EPS lub bez-
pośrednio do modułu trakcyjnego między piny 1C i 3C; oporność powinna wynosić
ok. 60, jeśli rezystancja wynosi 120, linia nie jest całkowicie dołączona. Wykonaj
pomiary bez zdejmowania konektorów.
3_Jeśli alarm pozostaje, wymień moduł.
D LINE SENSOR KO
Kanał silnika krokowego na biegunie n.3 konektora
CNB jest otwarty
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź połączenia silnika krokowego do modułu EPS, piny 3-4-9B.
2_Rozłącz konektor silnika krokowego i sprawdź testerem czy rezystancja między
dwoma fazami silnika wynosi ok. 30.
3_Sprawdź testerem izolację między silnikiem krokowym i ramą wózka.
4_ Jeśli alarm pozostaje, wymień moduł.
Q LINE SENSOR KO
Kanał silnika krokowego na biegunie n.9 konektora
CNB jest otwarty
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź połączenia silnika krokowego do modułu EPS, piny 3-4-9B.
2_Rozłącz konektor silnika krokowego i sprawdź testerem czy rezystancja między
dwoma fazami silnika wynosi ok. 30.
3_Sprawdź testerem izolację między silnikiem krokowym i ramą wózka.
4_ Jeśli alarm pozostaje, wymień moduł.
MOTOR LOCKED
Enkoder jesr uszkodzony lub są problemy z okablo-
waniem lub połączeniami
Wszystkie funkcje wózka są wstrzymane.
1_Korzystając ze schematów elektrycznych (podręcznik serwisowy, str. 14b) sprawdź
okablowanie z modułu do enkodera silnika kierowania.
2_Sprawdź czy czujnik indukcyjny autocentrowania koła pracuje prawidłowo. LED na
czujniku powinien świecić, gdy czyta płytkę na skrzyni przekładniowej.
3_Sprawdź, czy wszystkie parametry są prawidłowo ustawione.
4_Sprawdź, czy błąd pochodzi z enkodera korzystając z poniższej procedury:
a) wejdź do menu SPECIAL ADJUSTMENT.
b) Ustaw parameter FEED BACK DEVICE na poziom 1.
c) Sprawdź, czy podczas bardzo wolnego ruszania kierownicą nie są generowane
inne alarmy. Jeśli nie są, wymień enkoder silnika kierowania.
5_Skalibruj ponownie układ kierowniczy by uniknąć możliwości błędu w procedurze
rozruchowej.
EPS NOT ALIGNED
Czujnik położenia kierownicy jest wadliwy lub nie-
prawidłowo ustawiony. Koło będzie obracać się
przez ok. 6 sekund, po czym będzie wygenerowany
alarm.
Wszystkie funkcje wózka są wstrzymane.
1_Korzystając ze schematów elektrycznych (podręcznik serwisowy, str. 14b) sprawdź
okablowanie z modułu do enkodera silnika kierowania.
2_Sprawdź czy czujnik indukcyjny autocentrowania koła pracuje prawidłowo. LED na
czujniku powinien świecić, gdy czyta płytkę na skrzyni przekładniowej.
3_Sprawdź, czy wszystkie parametry są prawidłowo ustawione.
16
Moduł Mod.6 EPS-AC
EPROM NA 3.07
Alarm generowany i czytany z modułu
mod.6 EPS EPROM NA3.07
Opis alarmu
Zachowanie wózka przy włączonej stacyjce
lub podczas pracy
Postępowanie
4_Sprawdź, czy błąd pochodzi z enkodera korzystając z poniższej procedury:
a) wejdź do menu SPECIAL ADJUSTMENT.
b) Ustaw parameter FEED BACK DEVICE na poziom 1.
c) Sprawdź, czy podczas bardzo wolnego ruszania kierownicą nie są generowane
inne alarmy. Jeśli nie są, wymień enkoder silnika kierowania.
5_Skalibruj ponownie układ kierowniczy by uniknąć możliwości błędu w procedurze
rozruchowej.
JUMPING ENCODER
Odczyty z enkodera nie odpowiadają odczytom z
czujnika zbliżeniowego. Kalibracja parametru SET
180 ENC ma błąd przekraczający 10, niepożądany
sygnał został wychwycony przez czujnik zbliżeniowy
lub zakłócenia zakłóciły licznik impulsów enkodera.
Wszystkie funkcje wózka są wstrzymane.
1_Korzystając ze schematów elektrycznych (podręcznik serwisowy, str. 14b) sprawdź
okablowanie z modułu do enkodera silnika kierowania.
2_Sprawdź czy czujnik indukcyjny autocentrowania koła pracuje prawidłowo. LED na
czujniku powinien świecić, gdy czyta płytkę na skrzyni przekładniowej.
3_Sprawdź czy parametry dla kierowania 180 lub 360 zostały poprawnie ustawione;
zaleca się ponowną kalibrację układu kierowniczego, by uniknąć możliwości błędu w
procedurze rozruchowej.
4_ Jeśli alarm pozostaje, wymień enkoder silnika kierowania.
JUMPING ENCODER 2
Położenie bezwzględne obliczone z licznika enkode-
ra wykazuje przerwę od poprzedniego odczytu
(sprzed 4 ms), która jest zbyt duża uwzględniając
rzeczywistą prędkość maksymalną silnika kierowa-
nia.
1_Korzystając ze schematów elektrycznych (podręcznik serwisowy, str. 14b) sprawdź
okablowanie z modułu do enkodera silnika kierowania.
2_Sprawdź czy czujnik indukcyjny autocentrowania koła pracuje prawidłowo. LED na
czujniku powinien świecić, gdy czyta płytkę na skrzyni przekładniowej.
3_Sprawdź czy parametry dla kierowania 180 lub 360 zostały poprawnie ustawione;
zaleca się ponowną kalibrację układu kierowniczego, by uniknąć możliwości błędu w
procedurze rozruchowej.
4_ Jeśli alarm pozostaje, wymień enkoder silnika kierowania.
BAD ENCODER SIGNAL
Fazy kanałów enkodera zostały odwrócone (wejścia
16A i 17A) lub zamiana przewodów silnika kierowa-
nia
Wszystkie funkcje wózka są wstrzymane.
1_Korzystając ze schematów elektrycznych (podręcznik serwisowy, str. 14b) sprawdź
okablowanie z modułu do enkodera silnika kierowania.
2_Sprawdź czy czujnik indukcyjny autocentrowania koła pracuje prawidłowo. LED na
czujniku powinien świecić, gdy czyta płytkę na skrzyni przekładniowej.
3_Sprawdź czy parametry dla kierowania 180 lub 360 zostały poprawnie ustawione;
zaleca się ponowną kalibrację układu kierowniczego, by uniknąć możliwości błędu w
procedurze rozruchowej.
4_Zamień dwie fazy silnika kierowania: V z U lub W z V.
5_Zamień przewody na wejściach 16A i 17A.
6_Jeśli alarm pozostaje, wymień enkoder silnika kierowania.
EEPROM KO
Wewnętrzny błąd pamięci gdzie są przechowywane
zmienne wartości parametrów.
Wszystkie funkcje wózka są wstrzymane.
1_Wyłącz i włącz kluczykiem ponownie wózek.
2_Jeśli alarm zniknie po wyłączeniu i ponownym załączeniu wózka, możliwe jest że
uprzednio zapamiętane spersonalizowane parametry zostały zastąpione przez war-
tości domyślne.
3_ Jeśli alarm nie ustępuje, wymień moduł.
GAIN EEPROM KO
Alarm generowany przy rozruchu, jeśli zarezerwo-
wane komórki w eprom zostały uszkodzone lub gdy
został wpisany ponownie stary program (poprzednia
wersja 0.67)
1_Sprawdź czy jest zainstalowana prawidłowa wersja eprom.
2__ Jeśli alarm nie ustępuje, wymień moduł.
17
Moduł Mod.6 EPS-AC
EPROM NA 3.07
Alarm generowany i czytany z modułu
mod.6 EPS EPROM NA3.07
Opis alarmu
Zachowanie wózka przy włączonej stacyjce
lub podczas pracy
Postępowanie
HIGH TEMPERATURE
Temperatura modułu przekracza 75C. Maksy-
malny prąd jest zmniejszany proporcjonalnie do
wzrostu temperatury do 100C.
Gdy temperatura modułu osiągnie 100C,
wszystkie funkcje wózka są wstrzymane.
1_Sprawdź, czy alarm jest generowany także przy zimnym module.
2_ Jeśli alarm pozostaje, wymień moduł.
STBY I HIGH
Sygnały wartości bieżącej stanu gotowości w
spoczynku (mierzone między fazami U i W) nie
są w zakresie 2.5 ±0.3V i 2.5 ± 0.15V. Te
napięcia są mierzone między anodami D46 i
D45 i –batt.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź przyłącza zasilania silnika i przyłącza zasilania modułu.
2_Sprawdź izolację silnika kierowania.
3_ Jeśli alarm pozostaje, wymień moduł.
VMN NOT OK
Przynajmniej jedna z faz silnika wykazuje wyso-
kie napięcie między anodami D47 i D48 i –batt
podczas fazy początkowej stanu gotowości
(więcej niż 2.5 ±0.3V)
1_Sprawdź przyłącza zasilania silnika i przyłącza zasilania modułu.
2_Sprawdź izolację silnika kierowania.
3_ Jeśli alarm pozostaje, wymień moduł.
LOGIC FAILURE #3
Napięcie w spoczynku fazy Vv – Vw silnika jest
wysokie, co oznacza napięcie między anodą
D47 i –batt powyżej 0±0.25V.
1_Sprawdź przyłącza zasilania silnika i przyłącza zasilania modułu.
2_Sprawdź izolację silnika kierowania.
3_ Jeśli alarm pozostaje, wymień moduł.
LOGIC FAILURE #4
Napięcie w spoczynku fazy Vu – Vw silnika jest
wysokie, co oznacza napięcie między anodą
D48 i –batt powyżej 0±0.25V.
1_Sprawdź przyłącza zasilania silnika i przyłącza zasilania modułu.
2_Sprawdź izolację silnika kierowania.
3_ Jeśli alarm pozostaje, wymień moduł.
STEER HAZARD
Enkoder wykroczył poza zaprogramowaną
wartość
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź procedurę ustawiania kierowania.
2_ Jeśli alarm pozostaje, wymień moduł.
MOTOR TEMPERATURE
Moduł otrzymał sygnał analogowy z czujnika
temperatury silnika, że temperatura jest krytycz-
na.
Wózek działa normalnie.
1_Sprawdź połączenia czujnika temperatury między czujnikiem i modułem, pin 6F i 12F.
2_Jeśli alarm pozostaje nawet przy zimnym silniku, wymień moduł.
WAITING FOR TRAC
Moduł wysłał sygnał do modułu trakcji i czeka na
potwierdzenie.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź połączenia wyłącznika awaryjnego.
2_Wymień wyłącznik awaryjny
NO COMMUNICATION
Przenośny tester nie może połączyć się z modu-
łem.
Wszystkie funkcje wózka są wstrzymane.
1_Wymień moduł.
18
Moduł Mod.9
MHYRIO
Alarm generowany i czytany z modułu
Mod.9 MHYRIO
Opis alarmu
Zachowanie wózka przy włączonej stacyjce
lub podczas pracy
Postępowanie
EEPROM KO
Wewnętrzny błąd pamięci gdzie są przechowywa-
ne zmienne wartości parametrów.
Wszystkie funkcje wózka są wstrzymane.
1_Wyłącz i włącz kluczykiem ponownie wózek.
2_Jeśli alarm zniknie po wyłączeniu i ponownym załączeniu wózka, możliwe jest że
uprzednio zapamiętane spersonalizowane parametry zostały zastąpione przez war-
tości domyślne.
3_ Jeśli alarm nie ustępuje, wymień moduł.
CAN BUS KO
Ten jest generowany, gdy żadne komunikaty nie
dotarły do MHYRIO przez szynę Can bus.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź przenośnym testerem, czy można połączyć się z wszystkimi modułami.
2_Sprawdź połączenia can bus cyfrowym testerem przy wyłączonej stacyjce i dołączo-
nych wszystkich przewodach. Dołącz tester do pinów 13A i 3A modułu EPS; opor-
ność powinna wynosić ok. 60, jeśli rezystancja wynosi 120, linia nie jest całkowi-
cie dołączona. Wykonaj pomiary bez zdejmowania konektorów.
3_Jeśli alarm pozostaje, wymień moduł.
FF VALVES
Obwód przerzutnika („flip-flop”), który wskazuje, że
sterownik zaworów ON/OFF jest wyłączony. Ten
alarm dotyczy wejść zaworów pomocniczych (pin
4/9F – 3/10F – 2/5F).
Przyczyną może być duży prąd na boczniku.
1_Sprawdź oprzewodowanie zaworów.
2_Sprawdź czy oporność zaworów wynosi ok. 24.
3_Jeśli alarm pozostaje, wymień moduł.
DRIVER OPEN
MOS, który steruje wymuszeniem położenia
zaworu proporcjonalnego opuszczania wideł EV1
(pin 3 CNB) jest otwarty, gdy powinien być za-
mknięty.
Wstrzymane są wszystkie funkcje hydrauliczne.
1_Sprawdź oprzewodowanie zaworów.
2_Sprawdź czy oporność zaworów wynosi ok. 24.
3_Jeśli alarm pozostaje, wymień moduł.
DRIVER EVP GR1
MOS, który steruje wymuszeniem położenia
zaworu podnoszenia wideł EV2 (pin 10 CNG) jest
otwarty, gdy powinien być zamknięty.
1_Sprawdź oprzewodowanie zaworów.
2_Sprawdź czy oporność zaworów wynosi ok. 24.
3_Jeśli alarm pozostaje, wymień moduł.
DRIVER EVP GR2
MOS, który steruje wymuszeniem położenia
zaworu sięgania / wycofania nośnika EV3-4 (pin
11 - 16 CNG) jest otwarty, gdy powinien być
zamknięty.
1_Sprawdź oprzewodowanie zaworów.
2_Sprawdź czy oporność zaworów wynosi ok. 24.
3_Jeśli alarm pozostaje, wymień moduł.
DRIVER EVP GR3
MOS, który steruje wymuszeniem położenia
zaworów przechyłu EV5,6 (pin 9-13 CNG) i EV 7,8
przesuwu bocznego wideł (pin 12-15 CNG) jest
otwarty, gdy powinien być zamknięty.
1_Sprawdź oprzewodowanie zaworów i ich czystość.
2_Sprawdź, czy parametry zostały ustawione poprawnie.
3_Sprawdź czy oporność zaworów wynosi ok. 21.
4_Jeśli alarm pozostaje, wymień moduł.
DRIVER SHORTED
MOS, który steruje wymuszeniem położenia
zaworów jest zamknięty, gdy powinien być otwar-
ty.
1_Sprawdź oprzewodowanie zaworów i ich czystość.
2_Sprawdź, czy parametry zostały ustawione poprawnie.
3_Sprawdź czy oporność zaworów wynosi ok. 21.
4_Jeśli alarm pozostaje, wymień moduł.
19
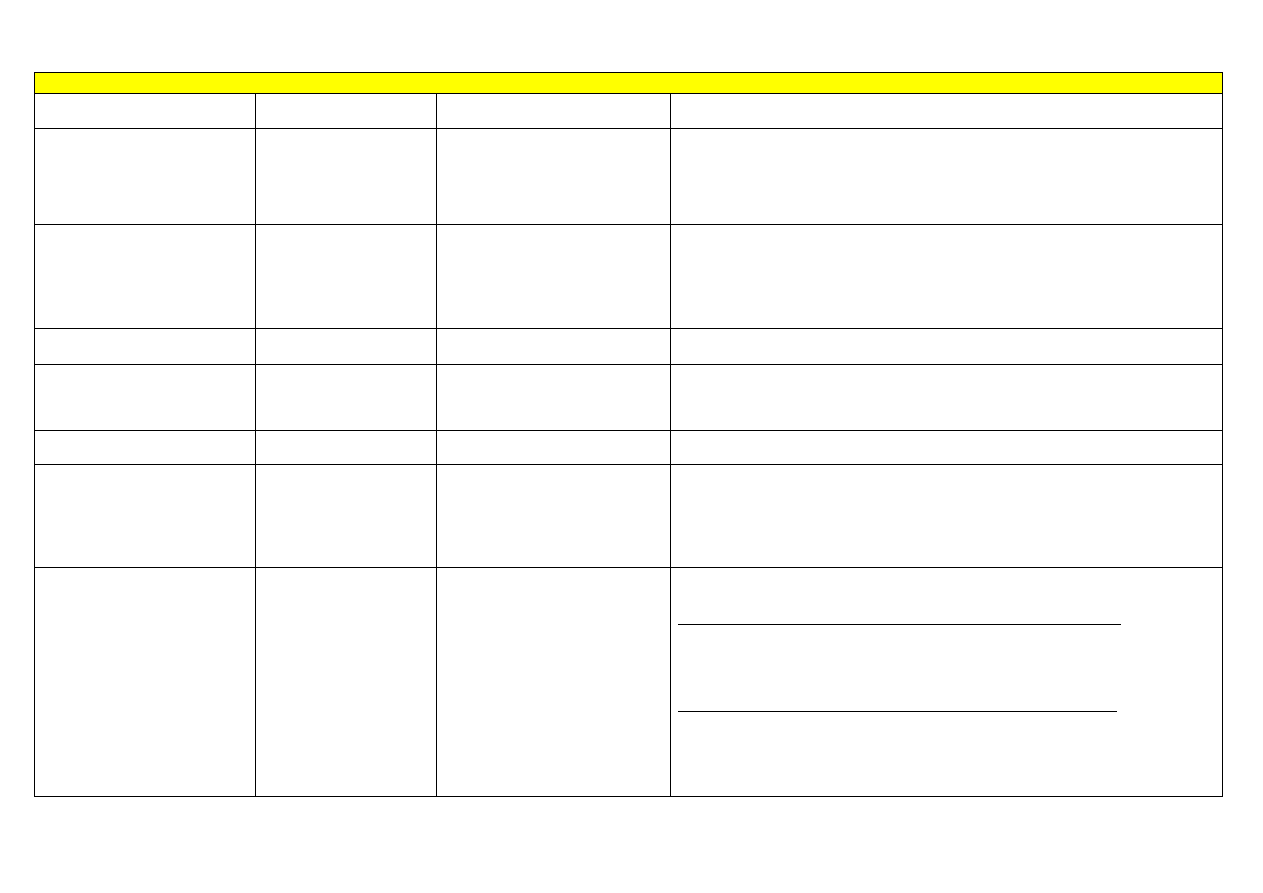
Moduł Mod.16 SICOS EPROM NA3.04
Alarm generowany i czytany z modułu
Mod.16 SICOS EPROM NA3.04
Opis alarmu
Zachowanie wózka przy włączonej sta-
cyjce lub podczas pracy
Postępowanie
CAN BUS KO
Moduł ekranu (SICOS), który
generuje ten alarm nie odebrał
komunikatu okresowego potwier-
dzenia połączenia (co 200 ms) z
modułów MHYRIO, CAN IO,
PUMP, TRACTION i EPS.
Wszystkie funkcje wózka są wstrzymane.
1_Sprawdź przenośnym testerem, czy można połączyć się z wszystkimi modułami.
2_Sprawdź połączenia can bus cyfrowym testerem przy wyłączonej stacyjce i dołączonych wszystkich prze-
wodach. Dołącz tester do pinów 13A i 3A modułu EPS; oporność powinna wynosić ok. 60, jeśli rezy-
stancja wynosi 120, linia nie jest całkowicie dołączona. Wykonaj pomiary bez zdejmowania konektorów.
NO CAN MESSAGE
Ten alarm jest generowany jeśli
do ekranu nie docierają żadne
komunikaty przez szynę can bus.
Wszystkie funkcje wózka oprócz kierowania
są wstrzymane.
1_Sprawdź przenośnym testerem, czy można połączyć się z wszystkimi modułami.
2_Sprawdź połączenia can bus cyfrowym testerem przy wyłączonej stacyjce i dołączonych wszystkich prze-
wodach. Dołącz tester do pinów 13A i 3A modułu EPS; oporność powinna wynosić ok. 60, jeśli rezy-
stancja wynosi 120, linia nie jest całkowicie dołączona. Wykonaj pomiary bez zdejmowania konektorów.
3_Sprawdź połączenie pojedynczego joysticka – pin 4D modułu CAN IO.
4_Jeśli alarm pozostaje, wymień moduł.
EPROM OFFLINE
Eprom włożony do modułu nie
działa prawidłowo.
Wszystkie funkcje wózka są wstrzymane.
1_Wyłącz i włącz kluczykiem ponownie wózek.
2_Jeśli alarm nie ustępuje, wymień moduł ekranu SICOS.
EEPROM KO
Wewnętrzny błąd pamięci gdzie
są przechowywane zmienne
wartości parametrów
Wszystkie funkcje wózka są wstrzymane.
1_Wyłącz i włącz kluczykiem ponownie wózek.
2_Jeśli alarm zniknie po wyłączeniu i ponownym załączeniu wózka, możliwe jest że uprzednio zapamiętane
spersonalizowane parametry zostały zastąpione przez wartości domyślne.
3_ Jeśli alarm nie ustępuje, wymień moduł.
PASSWORD NEEDED
Alarm jest generowany, gdy w
wózku ustawiono hasło dostępu
Wszystkie funkcje wózka są wstrzymane.
1_Wprowadź hasło.
RESET ENCODER
W wózkach, które nie mają
zamontowanego selektora
wstępnego poziomu i czujnika
zera, ten alarm jest generowany
gdy widły są powyżej nastawy
zera przy załączeniu stacyjki.
Wstrzymana jest funkcja podnoszenia wideł.
1_Sprawdź, czy podczas włączania stacyjki widły były unoszone; jeśli tak, resetuj przez opuszczanie i wyłą-
czenie / włączenie wózka.
2_Sprawdź czy LED na czujniku świeci gdy czujnik czyta płytkę.
3_Czujnik zerowania enkodera jest wadliwy lub ma uszkodzone połączenie, sprawdź piny 15A, 9A, 12A.
4_Sprawdź testerem czy czujnik jest prawidłowo zasilony, piny 15A, 9A.
5_ Jeśli alarm nie ustępuje, wymień moduł.
RESET HOUR METER
Ten alarm jest generowany, gdy
licznik godzin na ekranie i licznik
godzin w CAN IO mają różne
wartości. Ten alarm znika po ok.
1 minucie a godziny z ekranu są
przesyłane do licznika godzin w
CAN IO, kasując poprzednią
wartość.
Wszystkie funkcje wózka są wstrzymane.
UWAGA:
Gdy wymieniasz moduły SICOS lub CAN IO, możliwe jest zachowanie roboczogodzin wózka (patrz niżej).
PROCEDURA ZACHOWANIA ROBOCZOGODZIN PRZY WYMIANIE MODUŁU CAN IO:
Przed wymianą modułu CAN IO sprawdź przenośnym testerem czy parametr AUX FUNCTION 1 w SICOS
jest ustawiony na OFF a następnie wymień CAN IO. Gdy wózek zostanie ponownie włączony, nastąpi wy-
stawienie alarmu RESET HOUR METER. Po ok. 1 minucie alarm zniknie, a godziny zapamiętane w SICOS
zostaną przesłane do CAN IO i ukazane na ekranie wózka.
PROCEDURA ZACHOWANIA ROBOCZOGODZIN PRZY WYMIANIE MODUŁU SICOS:
Wymień moduł SICOS. Gdy wózek zostanie ponownie włączony, nastąpi wystawienie alarmu RESET HOUR
METER. W tym momencie masz 1 minutę na dołączenie przenośnego testera do SICOS i zmianę parametru
AUX FUNCTION 1 z OFF na ON. Alarm zniknie a godziny zachowane w CAN IO będą ukazane na ekranie
wózka. Zaleca się ponownie przestawienie parametru AUX FUNCTION 1 w SICOS z ON na OFF (wartość
domyślna) w chwili, gdy skończysz procedurę.
Wyszukiwarka
Podobne podstrony:
kody błędów do pralek samsung (PL)
Maszyny do prania kody błędów, KODY Pralek i inne, Jakieś inne Kody Lodówek i inne
Kody TV do pilota DM 800HD
Komunikaty i kody błędów BIOS, różne, Bios
kody błędów w?u subaru
Kody bledow OPEL Odczyt bez skanera
Kody błędów Opel Agila A, Corsa C
Kody BledowDTC PL
Kody Bledow DTC PL
Kody Mitsubishi Trouble, Kody błędów DTC PL
kody błędów opel(1), Diagnostyka samochodowa, diagnostyka2
Kody Kia Trouble, Kody błędów DTC PL
kody bledow
kody bledow Opel?rkujace kody
Kody Bledow
Kody błędów BMW INPA
Kody błędów opel, diagnostyka pojazdów
Opel Astra Kody Blędów, TECHNIKA!, Naprawa pojazdów
Kody błędów pralek Bauknecht Whirlpool (PL)
więcej podobnych podstron