
Wykład 1. 4 października 2010
Zbiory liczbowe
=
{0, 1, −1, 2, −2, . . . } − zbiór liczb całkowitych
∗
=
{1, −1, 2, −2, . . . } − zbiór liczb całkowitych różnych od zera
=
+
=
{1, 2, 3, 4, 5, . . . } − zbiór liczb naturalnych (całkowitych dodatnich)
−
=
{−1, −2, −3, −4, −5, . . . } − zbiór liczb całkowitych ujemnych
sign k = sign(k) =
0, k = 0,
1, k
∈
+
−1, −k ∈
+
− znak liczby k
=
−
=
{k − l : k, l ∈
}
Liczby naturalne wprowadzamy aksjomatycznie (aksjomatyka Peano) jako zbiór
w którym wyróżniony jest element 0 (najmniejsza liczba naturalna) i operacja na-
stępnika, która każdemu elementowi n z
przyporządkowuje liczbę n
0
w ten sposób,
że
◦ 0 nie jest następnikiem żadnej
◦◦ różne liczby nie mogą mieć tego samego następnika
◦ ◦ ◦ jedynym podzbiorem Z ⊂
takim, że 0
∈ Z oraz jeśli n ∈ Z to również n
0
∈ Z,
jest zbiór
Z =
.
Na trzecim aksjomacie oparta jest zasada indukcji matematycznej:
jeśli chcemy wykazać pewną własność T (n) dla wszystkich liczb naturalnych to
musimy sprawdzić, że
?
dla liczby 0 zachodzi własność T (0)
??
jeśli dla n zachodzi własność T (n) to dla n
0
zachodzi własność T (n
0
).
Przykład. Przy pomocy następnika definiujemy sumę liczb naturalnych
n
+ 0 = n, n + m
0
= (n + m)
0
.
Ponadto 0
0
= 1 i wtedy n
0
= (n + 0)
0
= n + 0
0
= n = 1.
Zatem następnikiem liczby n jest liczba n + 1.
Startując od 0 i wykonując kolejno operację następnika otrzymujemy kolejne liczby
naturalne, możemy w ten sposób otrzymać je wszystkie.
1
Dla zbioru X zdefiniujmy X
0
= X
∪ {X}. Możemy wziąć 0 = ∅ oraz jeśli n = X to
n
0
= X
0
. Mamy stąd
1 = 0
0
=
∅
0
=
{∅}, 2 = 1
0
=
{∅}
0
=
{∅, {∅}}, itd.
Przykład. Niech T (n): 36
|10
n
− 4, co oznacza, że 10
n
− 4 = 36k.
Jeśli założymy tę własność dla n to dla n + 1 będziemy mieli
10
n+1
− 4 = 10 · 10
n
− 4 = 10 · (10
n
− 4) + 36 = 10 · 36k + 36 = 36(10k + 1)
co oznacza, że dla n
0
własność T zachodzi. Ale nie zachodzi ona dla żadnej liczby
naturalnej bo liczba 10
n
− 4 nie jest podzielna przez 9 - przez 9 jest podzielna liczba
10
n
− 1.
Operatory sumy i iloczynu.
0
X
k=0
a
k
= a
0
,
n+1
X
k=0
a
k
=
n
X
k=0
a
k
+ a
n+1
n
P
k=n
0
a
k
=
n
P
k=0
a
k
−
n
0
−1
P
k=0
a
k
lub, jeśli a
k
nie są określone dla k < n
0
to kładziemy
n
X
k=n
0
a
k
=
n
X
k=0
f
a
k
,
f
a
k
=
a
k
, k
n
0
,
0, k < n
0
.
0
Y
k=0
a
k
= a
0
,
n+1
Y
k=0
a
k
=
n
Y
k=0
a
k
· a
n+1
.
Własności operacji sumowania:
•
n
P
k=0
(a
k
+ b
k
) =
n
P
k=0
a
k
+
n
P
k=0
b
k
•
n
P
k=0
αa
k
= α
n
P
k=0
a
k
•
n
P
k=0
a
k
=
n
P
k=0
a
n−k
,
n
P
k=0
1 = n + 1.
Przykład. Niech S
n
= 0 + 1 +
· · · + n =
n
P
k=0
k
. Mamy
2S
n
=
n
X
k=0
k
+
n
X
k=0
(n
− k) =
n
X
k=0
(k + n
− k)
=
n
X
k=0
n
= n
n
X
k=0
1 = n(n + 1),
2
skąd mamy S
n
=
n(n+1)
2
.
|k| = k · sign k − wartość bezwzględna liczby k
Własności wartości bezwzględnej:
• | − k| = |k| 0,
• |k · l| = |k| · |l|,
• |k + l| ¬ |k| + |l|.
Twierdzenie o dzieleniu z resztą w
.
Jeżeli a i b są liczbami całkowitymi, b
6= 0, to istnieje dokładnie jedna para liczb
całkowitych d i r takich, że
a
= b
· d + r, 0 ¬ r < |b|.
d
= d(a, b) - wynik dzielenia a przez b, r = r(a, b) - reszta z dzielenia a przez b.
Np.
−37 = (−7) · 6 + 5, d(−37, −7) = 6, r(−37, −7) = 5,
37 = 7
· 5 + 2, d(37, 7) = 5, r(37, 7) = 2.
Sformułowanie twierdzenia o dzieleniu z resztą jest przykładem zdania logicznego
w postaci implikacji.
Zdaniem logicznym jest każde
∗
zdanie orzekające. Zdania logiczne oznaczamy
najczęściej p, q, r, s, t, . . . .
(
∗
Za zdanie logiczne nie uznajemy raczej ”zdania” typu
Zdanie w tej ramce jest fałszywe )
Zdaniu p przypisujemy jego wartość w(p), którą najczęściej
∗
jest 0 lub 1 (mówimy
wtedy o logice dwuwartościowej). Jeżeli w(p) = 1 to mówimy, że zdanie jest prawdziwe
a przy w(p) = 0 mówimy o fałszywości zdania.
Z pojedynczych zdań możemy tworzyć zdania używając spójników zdaniowych
∨, ∧, =⇒, ⇐⇒ oraz operacji negacji
:
p
∨ q (p lub q) - alternatywa zdań p i q
p
∧ q (p i q) - koniunkcja zdań p i q
p
⇒ q (jeżeli p to q, z p wynika q, p pociąga q ) - implikacja zdań p i q, p - poprzednik
implikacji, q - następnik implikacji
p
⇔ q (p wtedy i tylko wtedy, gdy q) - równoważność zdań p i q
p
(nie p) - negacja zdania p
3
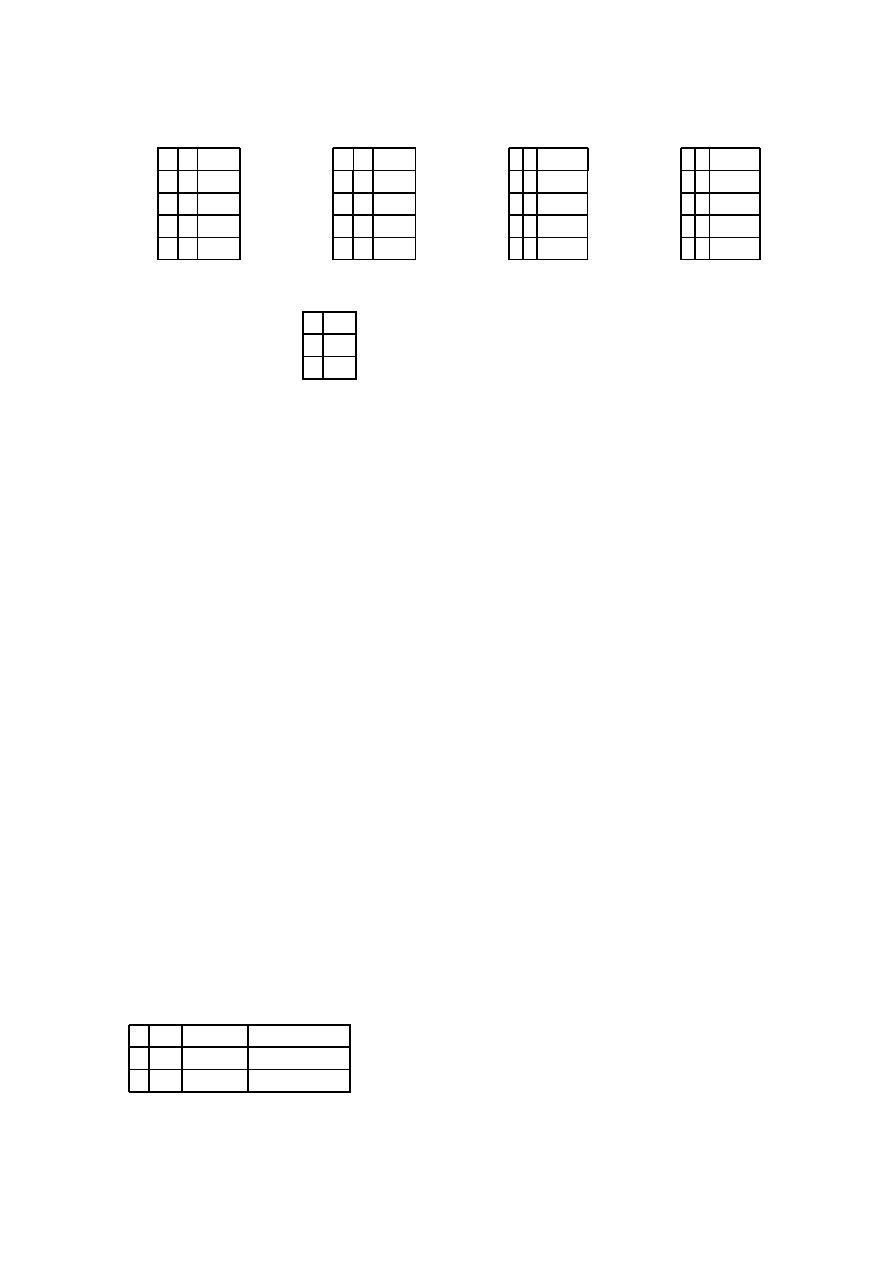
Wartości logiczne spójników i negacji są najczęściej określane przy pomocy tabelek,
np. dla koniunkcji, alternatywy, implikacji i równoważności mamy
p q p
∧ q
0 0
0
1 0
0
0 1
0
1 1
1
p q p
∨ q
0 0
0
1 0
1
0 1
1
1 1
1
p q p
⇒ q
0 0
1
1 0
0
0 1
1
1 1
1
p q p
⇔ q
0 0
1
1 0
0
0 1
0
1 1
1
Dla negacji mamy
p
p
0 1
1 0
w
(
p
) = r(w(p) + 1, 2)
Mamy wzory:
dla koniunkcji
w
(p
∧ q) = r(w(p) · w(q), 2) = w(p) · w(q)
dla alternatywy
w
(p
∨ q) = r(w(p) · w(q) + w(p) + w(q), 2)
dla implikacji
w
(p
⇒ q) = r(w(p) · w(q) + w(p) + 1, 2)
dla równoważności
w
(p
⇔ q) = r(w(p) + w(q) + 1, 2)
Zdanie utworzone ze zdań p, q, . . . i pewnej ilości spójników nazywamy tautologią
(lub prawem rachunku zdań) jeśli jego wartość wynosi 1 przy dowolnych wartościach
zdań składowych.
Np. prawa de Morgana są przykładem tautologii
(p
∨ q) ⇔ (
p
∧
q
)
(p
∧ q) ⇔ (
p
∨
q
)
prawo wyłączonego środka p
∨
p
prawo podwójnej negacji
(
p
)
⇔ p.
Tautologie można sprawdzać przy pomocy odpowiednich tabelek lub wykorzystując
powyższe wzory:
p
p
(
p
)
(
p
)
⇔ p
0 1
0
1
1 0
1
1
w
(
(
p
)) = r(w(
p
)+1, 2) = r(w(p)+2, 2) = w(p).
w
(p
∨
p
) = r(w(p)
· w(
p
) + w(p) + w(
p
), 2)
= r(w(p)
· w(p) + w(p) + w(p) + w(p) + 1, 2) = r(4w(p) + 1, 2) = 1.
4
Wykład 2. 11 października 2010
Kwantyfikatory.
Zdanie w którym występuje zmienna nazywamy formą zdaniową. Oznaczamy je
często ϕ(x), ψ(x), np.
ϕ
(x) : x
2
¬ 0, ψ(x) : x
2
=
−1.
Jeśli za zmienną podstawimy konkretną wartość to staje się ono zwykłym zdaniem,
prawdziwym lub fałszywym.
Zdania typu dla każdego x ze zbioru X zachodzi ϕ(x) oraz istnieje y ze zbioru Y
dla którego ψ
(y) jest prawdą zapisujemy odpowiednio
∀x ∈ Xϕ(x)
∃y ∈ Y ψ(y)
Wyrażenie dla każdego które oznaczamy
∀ nazywamy kwantyfikatorem ogólnym
lub dużym a wyrażenie istnieje nazywamy kwantyfikatorem szczegółowym lub
małym.
Kwantyfikatory tego samego rodzaju można pisać w dowolnej kolejności, łączyć ze
sobą, natomiast nie można zmieniać kolejności między dużym i małym, np. w zdaniu
∀ε > 0∃n
0
∀n n
0
|a
n
− g| < ε
zawarta jest definicja równości lim
n→∞
a
n
= g podczas gdy zdanie
∃n
0
∀ε > 0 ∀n n
0
|a
n
− g| < ε
jest równoważne zdaniu
∀n n
0
a
n
= g.
Prawa de Morgana dla kwantyfikatorów
∀x ∈ X ϕ(x) ⇔ ∃x ∈ X
ϕ
(x)
∃x ∈ X ϕ(x) ⇔ ∀x ∈ X
ϕ
(x).
Zasadę indukcji przy pomocy kwantyfikatorów możemy zapisać następująco:
w
(T (0)) = 1
∧ w(∀n 0 (T (n) ⇒ T (n + 1))) = 1 ⇔ ∀n 0 w(T (n)) = 1.
Nieco ogólniejsza zasada indukcji:
w
(T (n
0
)) = 1
∧ w(∀n n
0
(T (n)
⇒ T (n + 1))) = 1 ⇔ ∀n n
0
w
(T (n)) = 1.
Regułę tę otrzymamy z podstawowej zasady indukcji rozpatrując własność T
0
(n) =
T
(n + n
0
).
Indukcja wsteczna.
5
∀n n
0
w
(T (n)) = 1
⇔ w(∀n n
0
+1(T (n)
⇒ T (n−1))) = 1 ∧∀n ∈ A w(T (n)) = 1,
gdzie
A jest nieskończonym zbiorem liczb naturalnych, domyślnie pewnej szczególnej
postaci np. kwadratów liczb naturalnych, czy też potęg dwójki.
Przykład. Nierówność Cauchy’ego między średnią arytmetyczną i geometryczną:
∀n 2 ∀a
n
>
0
a
1
+
· · · + a
n
n
n
√
a
1
· · · · · a
n
∀n 2 ∀a
n
>
0
n
P
k=1
a
k
n
n
v
u
u
t
n
Y
k=1
a
k
∀n 2 ∀a
n
>
0
1
n
n
X
k=1
a
k
n
Y
k=1
a
k
!
1/n
Dla n = 2 nierówność jest równoważna nierówności
(a
1
+ a
2
)
2
− 4a
1
a
2
0 ⇔ (a
1
− a
2
)
2
0,
skąd łatwo uzasadnić nierówność Cauchy’ego dla n = 2
k
, np.
a
1
+ a
2
+ a
3
+ a
4
4
=
a
1
+a
2
2
+
a
3
+a
4
2
2
s
a
1
+ a
2
2
·
a
3
+ a
4
2
q
√
a
1
· a
2
·
√
a
3
· a
4
=
4
√
a
1
a
2
a
3
a
4
.
a
1
+
· · · + a
n−1
n
− 1
= (a
1
+
· · · + a
n−1
)(
1
n
− 1
−
1
n
) + (a
1
+
· · · + a
n−1
)
1
n
=
1
n
(a
1
+
· · · + a
n−1
+
1
n
− 1
(a
1
+
· · · + a
n−1
))
a
1
· · · · · a
n−1
·
1
n
− 1
(a
1
+
· · · + a
n−1
)
1/n
,
a
1
+
· · · + a
n−1
n
− 1
1−1/n
(a
1
· · · · · a
n−1
)
1/n
⇓
a
1
+
· · · + a
n−1
n
− 1
(a
1
· · · · · a
n−1
)
1/n−1
.
a, b
∈ , b > 0
r
(a, b) := a( mod b).
b
↔ m 2 r(a, m) = a( mod m).
m
=
{0, 1, . . . , m − 1} - zbiór reszt przy dzieleniu przez m.
2
=
{0, 1}
s, t
∈
m
s
+
m
t
= s + t(
mod m) = r(s + t, m)
s
·
m
t
= s
· ( mod m) = r(s · t, m).
Reszty można dodawać, mnożyć odejmować a w pewnych przypadkach dzielić:
6
• dodawanie i mnożenie reszt są przemienne i łączne
• ∀s ∈
m
s
+
m
0 = s
• ∀s ∈
m
s
·
m
1 = s
• zachodzi rozdzielność mnożenia względem dodawania
(s +
m
t
)
·
m
= (s
·
m
u
) +
m
(t
·
m
u
)
• ∀s ∈
m
∃t ∈
m
s
+
m
t
= 0.
Mamy
t
=:
−s =
s, s
= 0
m
− s, 0 < s ¬ m − 1.
• ∀s ∈
m
\ {0}∃t ∈
m
s
·
m
t
= 1
⇔ m jest liczbą pierwszą
t
:= s
−1
= s
−1
( mod m), np. (m
− 1)
−1
= (m
− 1)
−1
( mod m) = m
− 1.
s
: t = s
·
m
t
−1
m
2 jest liczbą pierwszą ⇔ (m = m
1
· m
2
⇒ (m
1
= 1
∨ m
1
= m)
P - zbiór liczb pierwszych, P = {2, 3, 5, . . . }
r
(a, b) = 0 to b
|a
m
∈ P ⇔ ∀a, b ∈
m
|a · b ⇒ (m|a lub m|b)
Zasadnicze twierdzenie arytmetyki
Dla dowolnej liczby naturalnejm > 1 istnieje dokładnie jeden układ licz pierwszych
p
1
¬ · · · ¬ p
k
takich, że
m
= p
1
· · · · · p
k
Największy wspólny dzielnik.
• NW D(0, 0) = 0
• a, b ∈
, a
6= 0 lub b 6= 0 to NW D(a, b) = d ⇔ (d|a ∧ d|b ∧ ∀c ∈
(c
|a∧c|b ⇒
c
¬ d) (musi być wtedy c|d)
Twierdzenie o największym wspólnym dzielniku
∃ x, y ∈
N W D
(a, b) = xa + yb
N W D
(a, b) = 1 to a, b - względnie pierwsze.
7
Zastosowanie.
s
∈
m
, s, m względnie pierwsze to
1 = xs + ym
⇒ xs = 1 − my ⇒ s
−1
= x(
mod m).
Chińskie twierdzenie o resztach.
m
1
, . . . , m
s
∈
, m
j
2 liczby parami względnie pierwsze, r
j
∈
m
j
, j
= 1, . . . , s
to istnieje dokładnie jeden element x
∈
m
1
·····m
s
, taki, że r(x, m
j
) = r
j
, j
= 1, . . . , s.
Mamy wzór
x
=
s
X
j=1
r
j
r
(m
j
,
m
1
· · · · · m
s
m
j
)
−1
( mod m
1
· · · · · m
s
).
Np. Dla s = 2 m
1
= k, m
2
= k + 1 mamy
x
= r
1
+ r
2
k.
Algorytm Euklidesa.
a
b NW D(a, b) = NW D(b, r(a, b))
r
0
= r(a, b), r
1
= r(b, r
0
), r
2
= r(r
0
, r
1
)
r
k+1
= r(r
k−1
, r
k
)
r
0
> r
1
> . . .
∃n r
n+1
= 0, r
n
6= 0
r
n
= N W D(a, b)
8
Wykład 3. 18 października 2010
Algorytm Euklidesa.
a
b NW D(a, b) = NW D(b, r(a, b))
r
0
= r(a, b), r
1
= r(b, r
0
), r
2
= r(r
0
, r
1
)
r
k+1
= r(r
k−1
, r
k
)
r
0
> r
1
> . . .
∃n r
n+1
= 0, r
n
6= 0
r
n
= N W D(a, b)
- zbiór liczb wymiernych (ułamków)
x
=
k
l
- ułamek, k
∈
- licznik, l
∈
∗
- mianownik
x
=
m
n
, m, n
∈
, n
0 lub x = −
m
n
.
3 x = {(m, n)} = {(k, l)} ⇔ ml = nk.
n
= n
1
N W D
(m, n), m = m
1
N W D
(m, n)
⇒
m
n
=
m
1
n
1
, N W D
(m
1
, n
1
) = 1.
9

1. Liczby zespolone.
Liczby zespolone
pojawiły si¸e po raz pierwszy w ksi¸ażce włoskiego matematyka
Rafaela Bombelliego ”Algebra”
napisanej ok. roku 1560 a opublikowanej w 1572.
Liczba zespolona z
to element postaci
z
= x + yi, gdzie x, y
∈
oraz i =
√
−1.
Przyjmujemy, że jeżeli z = x + yi, w = x
1
+ y
1
i
to
z
= w
⇔ x = x
1
, y
= y
1
.
Jeżeli z = x+yi to liczby rzeczywiste x i y nazywaj¸a si¸e odpowiednio cz¸eści¸a rzeczywist¸a
i cz¸eści¸a urojon¸a liczby z i oznaczamy je
x
=
<z, y = =z.
Zatem z =
<z + =zi oraz z = w ⇔ <z = <w i =z = =w.
Definiujemy 0 := 0 + 0i, 1 = 1 + 0i. Przez
oznaczamy zbiór liczb zespolonych.
Dodawanie i odejmowanie liczb zespolonych.
(x + yi) + (x
1
+ y
1
i
) := (x + x
1
) + (y + y
1
)i
czyli
<(z + w) = <z + <w, =(z + w) = =z + =w.
(x + yi)
− (x
1
+ y
1
i
) := (x
− x
1
) + (y
− y
1
)i
czyli
<(z − w) = <z − <w, =(z − w) = =z − =w.
−z = −(x + yi) = −x + (−y)i = −x − yi − liczba przeciwna :
<(−z) = −<z, =(−z) = −=z.
10
Własności dodawania.
(1)
∀z, w ∈
z
+ w = w + z (przemienność)
(2)
∀z ∈
z
+ 0 = 0 + z = z (0 jest elementem neutralnym dodawania)
(3)
∀z ∈
z
+ (
−z) = (−z) + z = 0 (liczba przeciwna jest elementem
odwrotnym dla dodawania
)
(4)
∀z, w, v ∈
(z + w) + v = z + (w + v) (ł¸aczność dodawania).
Własności (1)–(4) wynikaj¸a z odpowiednich własności liczb rzeczywistych.
Mnożenie i dzielenie liczb zespolonych.
Liczba sprz¸eżona
: z = x + yi, z := x
− yi.
Moduł liczby zespolonej: z
= x + yi,
|z| :=
√
x
2
+ y
2
.
Mnożenie liczb zespolonych
:
(x + yi)
· (x
1
+ y
1
i
) := (xx
1
− yy
1
) + (xy
1
+ yx
1
)i.
(x + 0i)
· (x
1
+ 0i) = xx
1
+ 0i
∀a ∈
a
· (x + yi) = ax + ayi
z
= 0
⇔ x = y = 0 ⇔ |z|
2
= 0; z
6= 0 ⇒ |z|
2
6= 0
z
· z = |z|
2
Własności mnożenia:
(1)
∀z, w ∈
z
· w = w · z (przemienność)
(2)
∀z ∈
z
· 1 = 1 · z (1 jest elementem neutralnym)
(3)
∀z, w, v ∈
(z
· w) · v = z · (w · v) (ł¸aczność)
(4)
∀z, w, v ∈
(z + w)
· v = z · v + w · v (rozdzielność mnożenia
wzgl¸edem dodawania
)
Dowody (3),(4): obliczamy lewe i prawe strony i porównujemy.
(5)
∀z ∈
\ {0} z ·
1
|z|
2
z
= 1 (liczba
1
z
=
1
|z|
2
z element odwrotny do z
)
z
w
= z : w = z
1
w
=
1
|w|
2
z
· w =
z
· w
|w|
2
w
z
=
1
z
w
Własności sprz¸
eżenia liczby zespolonej.
(S1)
∀x, y ∈
x
= x, yi =
−yi.
(S2)
∀z, w ∈
z
+ w = z + w, z
− w = z − w.
(S3)
∀z, w ∈
z
· w = z · w,
z
w
=
z
w
.
(S4)
∀z ∈
<z =
z+z
2
,
=z =
z−z
2i
.
(S5)
∀z ∈
z
· z = |z|
2
.
Ad S3) Wystarczy sprawdzić pierwsz¸a równość gdy w = x
1
∈
i w = y
1
i, y
1
∈
,
gdyż jeśli wzór b¸edzie prawdziwy w takich przypadkach to
z
· w = z · x
1
+ z
· y
1
i
(S2)
= z
· x
1
+ z
· y
1
i
= z
· x
1
+ z
· (−y
1
i
) = z
· w
11
z
· x
1
= xx
1
+ yx
1
i
⇒ z · x
1
= xx
1
− yx
1
i
= (x
− yi) · x
1
= z
· x
1
;
z
· (y
1
i
) = xy
1
i
− yy
1
=
−yy
1
+ xy
1
i
⇒
z
· (y
1
i
) =
−yy
1
− xy
1
i
= (
−y − xi) · y
1
=
−y − xi
−i
· (−y
1
i
) = (x +
y
i
)(y
1
i
) = (x
− yi)(y
1
i
) = z(y
1
i
);
z
w
· w = z ⇒
z
w
· w = z ⇒
z
w
=
z
w
.
Własności modułu liczby zespolonej.
(M1)
∀z ∈
|z| = |z| 0; |<z| ¬ |z|, |=z| ¬ |z|;
(M2)
|z| = 0 ⇔ z = 0;
(M3)
∀z, w ∈
|z · w| = |z| · |w|;
z
w
=
|z|
|w|
;
(M4)
∀z, w ∈
|z + w|
2
=
|z|
2
+
|w|
2
+ 2
<(zw);
(M5)
∀z, w ∈
|z + w|
2
+
|z − w|
2
= 2
|z|
2
+ 2
|w|
2
;
(M6)
∀z, w ∈
|z + w| ¬ |z| + |w|.
Ad (M3): (M3)
⇔ |z · w|
2
=
|z|
2
· |w|
2
:
|z · w|
2
= z
· w · z · w = z · w · z · w = z · z · w · w = |z|
2
· |w|
2
;
z
w
· w = z ⇒
z
w
· |w| ⇒
z
w
=
|z|
|w|
.
Ad (M4)
|z + w|
2
= (z + w)
· z + w = (z + w)(z + w) = z · z + w · w + z · w + z · w
=
|z|
2
+
|z|
2
+ z
· w + z · w =
(S4)
=
|z|
2
+
|w|
2
+ 2
<(z · w).
Ad (M5)
|z + w|
2 (M 4)
=
|z|
2
+
|w|
2
+ 2
<(z · w),
|z − w|
2
=
|z|
2
+
|w|
2
+ 2
<(z · (−w)),
|z + w|
2
+
|z − w|
2
= 2
|z|
2
+ 2
|w|
2
+ 2
<(z · w − z · w) = 2|z|
2
+ 2
|w|
2
.
Ad (M6)
|z + w|
2
=
|z|
2
+
|w|
2
+ 2
<(z · w) ¬ |z|
2
+
|w|
2
+ 2
|<(z · w)| ¬ |z|
2
+
|w|
2
+ 2
|z · w|
=
|z|
2
+
|w|
2
+ 2
|z| · |w| = (|z| + |w|)
2
⇒ |z + w| ¬ |z| + |w|.
Zastosowanie:
Niech z = x + yi, w = u + vi, x, y, u, v
∈
|z|
2
= x
2
+ y
2
=: n
∈
,
|w|
2
= u
2
+ v
2
=: m
∈
;
12
n
· m = |z|
2
· |w|
2
=
|(xu − yv) + (xv + yu)i|
2
= (xu
− yv)
2
+ (xv + yu)
2
,
oraz xu
− yv, xv + yu ∈ .
Wniosek: jeśli liczby naturalne m i n s¸a sumami dwóch kwadratów liczb całkowitych
to ich iloczyn ma również t¸e własność
Postać trygonometryczna liczby zespolonej.
Niech z
∈
, z
6= 0. Wtedy możemy napisać
z
= x + yi =
q
x
2
+ y
2
·
x
√
x
2
+ y
2
+
y
√
x
2
+ y
2
i
!
.
Oznaczmy
q
x
2
+ y
2
= r,
x
√
x
2
+ y
2
= s,
y
√
x
2
+ y
2
= t.
Wtedy r =
|z| oraz punkt (s, t) leży na okr¸egu jednostkowym gdyż s
2
+ t
2
= 1. Dlatego
istnieje liczba ϕ
∈
taka, że s = cos ϕ, t = sin ϕ.
Liczb¸e ϕ nazywamy argumentem liczby z i definiujemy
arg z =
{ϕ ∈
: ϕ
− argument z}
Ponadto
∃! ϕ
0
∈ [0, 2π), ϕ
0
- argument z.
ϕ
0
=: Arg z - argument główny z:
{Arg z} = arg z ∩ [0, 2π).
Mamy
arg z =
{Arg z + 2kπ : k ∈ } = {ϕ + 2kπ : k ∈ },
gdzie ϕ jest dowolnym ustalonym argumentem liczby z. Zatem
z
= r(cos ϕ + sin ϕi), r =
|z|, ϕ ∈ arg z
i jest to tzw. postać trygonometryczna liczby zespolonej z. Mamy przy tym
z
= w
⇔ |z| = |w| i arg z = arg w ⇔ |z| = |w| i Arg z = Arg w.
Niech z = r
1
(cos ϕ
1
+ sin ϕ
1
i
), w = r
2
(cos ϕ
2
+ sin ϕ
2
i
). Wtedy
z
· w = r
1
r
2
(cos ϕ
1
+ sin ϕ
2
i
)(cos ϕ
12
+ sin ϕ
2
i
) = r
1
r
2
(cos(ϕ
1
+ ϕ
2
) + sin(ϕ
1
+ ϕ
2
)i),
z
w
=
r
1
(cos ϕ
1
+ sin ϕ
1
i
)
r
2
(cos ϕ
2
+ sin ϕ
2
i
)
=
r
1
r
2
(cos(ϕ
1
− ϕ
2
) + sin(ϕ
1
− ϕ
2
)i),
czyli
arg(z
· w) = {ϕ
1
+ ϕ
2
: ϕ
1
∈ arg z, ϕ
2
∈ arg w} = arg z + arg w,
arg
z
w
=
{ϕ
1
− ϕ
2
: ϕ
1
∈ arg z, ϕ
2
∈ arg w} = arg z − arg w.
Wzór de Moivre’a.
13
Jeżeli ϕ
∈ arg z to
z
n
= (r(cos ϕ + sin ϕi))
n
= r
n
(cos nϕ + sin nϕi), n
∈
(n
∈ ).
Dla n
∈
wzór dowodzimy przez indukcj¸e, a dla k
∈ , k < 0 wykorzystujemy
dzielenie liczb w postaci trygonometrycznej.
Pierwiastki stopnia n z liczby zespolonej.
n
q
r
(cos ϕ + sin ϕi) =
(
n
√
r
cos
ϕ
+ 2kπ
n
+ sin
ϕ
+ 2kπ
n
i
!
: k = 0, 1, . . . , n
− 1
)
=
{w
k
: k = 0, 1, . . . , n
− 1}.
Mamy bowiem
n
√
z
=
{w ∈
: w
n
= z
}.
Jeśli w
∈
n
√
z
to w = ρ(cos ψ + sin ψi) i z wzoru de Moivre’a ρ
n
= r, nψ
∈ arg z ⇒
nψ
= ϕ + 2kπ. Ale
k
= m
· n + k
0
, k
0
∈ {0, 1, . . . , n − 1}
to ψ =
ϕ+2k
0
π
n
+ 2mπ, co oznacza w = w
k
0
. Oczywiście dla wszystkich k w
n
k
= z.
14
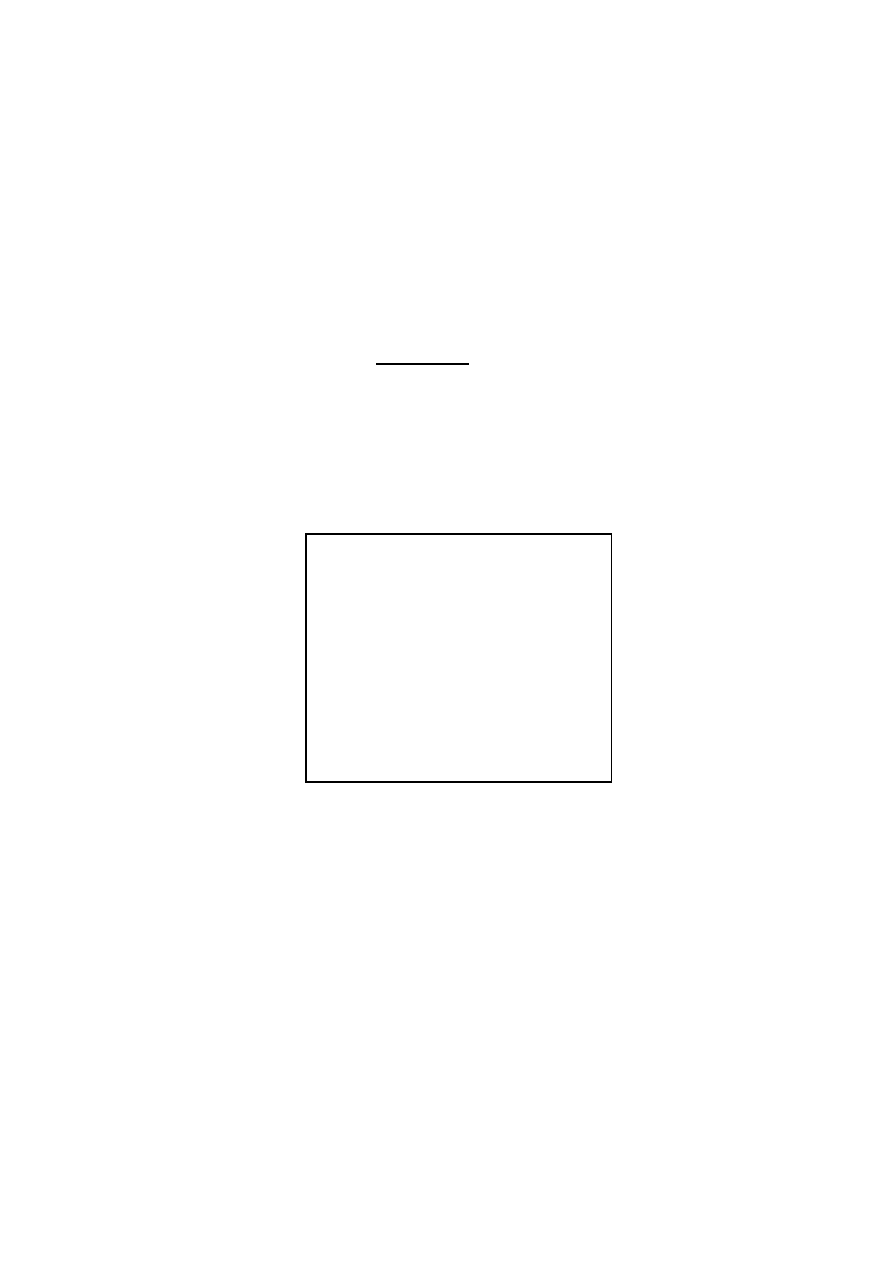
(I)
=
2
- definicja liczb zespolonych jako punktów płaszczyzny. Liczby
zespolone jako wektory.
Y
ϕ
X
z
= x + yi
x
y
w
z
+ w
z
− w
1
i
(x, y) + (x
1
, y
1
) := (x + x
1
, y
+ y
1
)
(x, y)
· (x
1
, y
1
) := (xx
1
− yy
1
, xy
1
+ yx
1
)
(x, y) = (x, 0) + (0, y) = (x, 0)
· (1, 0) + (y, 0) · (0, 1)
1 = (1, 0), i = (0, 1), x = (x, 0), y = (y, 0)
z
= (x, y) = x + yi
O
z
= (x, y) - wektor zaczepiony w pocz¸atku układu współrz¸ednych O
x, y
współrz¸edne wektora z
x
- rzut wektora z na oś OX
15
y
- rzut wektora z na oś OY
ϕ
- k¸at (skierowany) osi OX z z
|z| - długość wektora z
|z − w| - odległość punktów z i w
z
◦ w = (w, y) ◦ (x
1
, y
1
) = xx
1
+ yy
1
- iloczyn skalarny wektorów z i w
z
◦ w = <(z · w).
{z ∈
:
|z − z
0
| = R} = O(z
0
, R
),
{z ∈
:
|z − z
0
| < R} = K(z
0
, R
),
{z ∈
:
|z − z
1
| + |z − z
2
| = R} = E(z
1
, z
2
, R
), (R >
|z
1
− z
2
| ).
O
(z
1
, R
) - okr¸ag, K(z
0
, R
) - koło,
E(z
1
, z
2
, R
) - elipsa o ogniskowych w punktach z
1
i
z
2
.
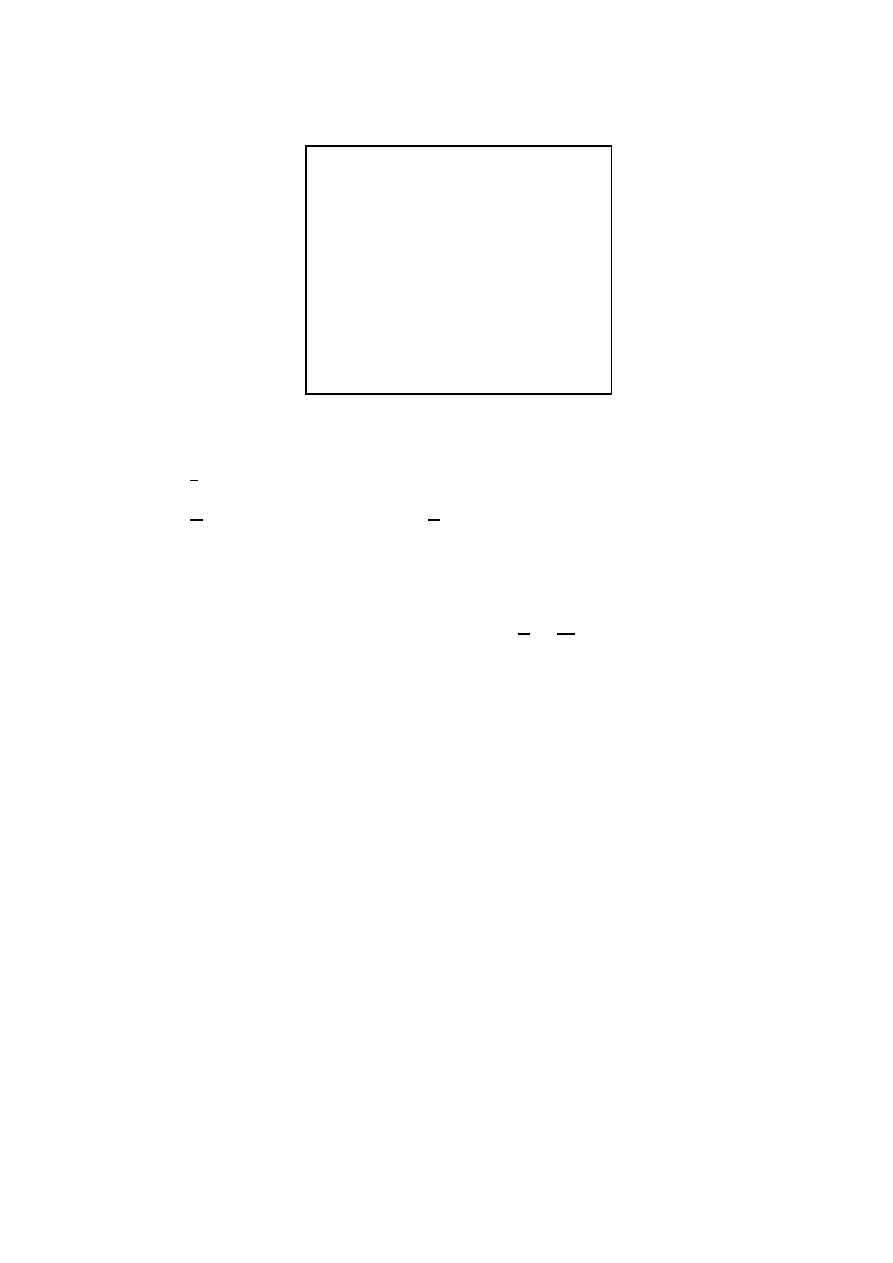
(II)
C = {f :
2
−→
2
: f jest złożeniem jednokładności o środku O
i skali r
0 oraz obrotu o k¸at ϕ wzgl¸edem osi OX}
Y
ϕ
r
X
y
x
x
r
= cos ϕ
y
r
= sin ϕ
f
(x, y) =?
f
(x, y) = f (x(1, 0) + y(0, 1)) = xf (1, 0) + yf (0, 1)
(1, 0)
−→ (r, 0) −→ (r cos ϕ, r sin ϕ),
(0, 1)
−→ (0, r) −→ (r cos(ϕ +
π
2
), r sin(ϕ +
π
2
) = (
−r sin ϕ, r cos ϕ),
f
(x, y) = x(r cos ϕ, r sin ϕ) + y(
−r sin ϕ, r cos ϕ)
= (r cos ϕx
− r sin ϕy, r sin ϕx + r cos ϕy).
dodawanie odwzorowań
↔ dodawanie liczb zesplonych
składanie odwzorowań
↔ mnożenie liczb zespolonych
odwzorowanie odwrotne
↔ odwrotność liczby zespolonej
(III)
16

f
:
2
−→
2
- odwzorowanie liniowe:
f
(a(s, t)) = af (s, t), f ((s, t) + (s
1
, t
1
)) = f (s + s
1
, t
+ t
1
) = f (s, t) + f (s
1
, t
1
),
f
(s, t) = sf (1, 0) + tf (0, 1).
Ogólna postać odwzorowania liniowego
2
−→
2
:
f
(s, t) = (as + bt, a
1
s
+ b
1
t
) = sf (1, 0) = tf (0, 1),
f
(1, 0) = (a, a
1
), f (0, 1) = (b, b
1
).
C = {f :
2
−→
2
: f (s, t) = (zs
− yt, ys + xt), x, y ∈
(ustalone)
}
dodawanie odwzorowań
↔ dodawanie liczb zespolonych
składanie odwzorowań
↔ mnożenie liczb zespolonych
odwzorowanie odwrotne
↔ odwrotność liczby zespolonej
f
(s, t) = (xs
− yt, ys + xt), f(1, 0) = (x, y), f(0, 1) = (−y, x).
f
(s + ti) = (x + yi)
· (s + ti).
17

(IV)
f
:
2
−→
2
- odwzorowanie liniowe
Zamiast (s, t) b¸edziemy pisać
"
s
t
#
.
Możemy napisać
f
"
s
t
#
=
"
as
+ bt
a
1
s
+ b
1
t
#
=
"
a b
a
1
b
1
# "
s
t
#
.
Odwzorowaniu f odpowiada tablica (macierz)
f
↔
"
a b
a
1
b
1
#
Sum¸e macierzy definiujemy jako macierz odpowiadaj¸ac¸a sumie odwzorowań, iloczyn
macierzy definiujemy jako tablic¸e która odpowiada składaniu odwzorowań. Jeżeli
f
↔
"
a b
a
1
b
1
#
, g
↔
"
˜
a ˜
b
˜
a
1
˜b
1
#
to
f
+ g
↔
"
a b
a
1
b
1
#
+
"
˜
a ˜b
˜
a
1
˜b
1
#
,
f
◦ g ↔
"
a b
a
1
b
1
#
·
"
˜
a ˜b
˜
a
1
˜b
1
#
"
a b
a
1
b
1
#
+
"
˜
a ˜b
˜
a
1
˜b
1
#
:=
"
a
+ ˜
a
b
+ ˜b
a
1
+ ˜
a
1
b
1
+ ˜b
1
#
"
a b
a
1
b
1
#
·
"
˜
a ˜b
˜
a
1
˜b
1
#
:=
"
a
˜
a
+ b˜
a
1
a˜b
+ b˜b
1
a
1
˜
a
+ b
1
˜
a
1
a
1
˜b + b
1
˜b
1
#
.
Zbiór macierzy (tablic) o dwóch wierszach i dwóch kolumnach oznaczmy
M
(2,2)
. Defi-
niujemy
C :=
("
x
−y
y x
#
, x, y
∈
)
.
dodawanie macierzy
↔ dodawanie liczb zespolonych
mnożenie macierzy
↔ mnożenie liczb zespolonych
Sk¸ad bior¸a si¸e powyższe macierze?
Oznaczmy przez f
z
odwzorowanie
−→
dane wzorem
f
z
(w) = z
· w.
Jest to odwzorowanie
liniowe bo
f
z
(w
1
+ w
2
) = z(w
1
+ w
2
) = zw
1
+ zw
2
= f
z
(w
1
) + f
z
(w
2
), w
1
, w
2
∈
f
z
(tw) = z(tw) = t(zw) = tf
z
(w), w
∈
, t
∈
.
Oznaczmy zbiór tych odwzorowań
liniowych przez
C
18

Odwzorowanie
Φ :
3 z −→ f
z
∈ C
spełnia warunki:
- jest bijekcj¸a,
- Φ(z + w) = Φ(z) + Φ(w), Φ(z
· w) = Φ(z) ◦ Φ(w).
Mówimy, że Φ jest wtedy izomorfizmem.
Ponieważ przy ustalonej bazie
B mamy izomorfizm f
z
−→ M
f
z
to musimy tylko
znaleźć postać macierzy M
f
z
. W tym celu przyjmijmy
B = {1, i}. Jeżeli
M
f
z
=
"
a b
a
1
b
1
#
to
"
a
a
1
#
= f
z
(1),
"
b
b
1
#
= f
z
(i)
i otrzymamy
f
z
(1) = z
· 1 = z = x + yi =
"
x
y
#
,
f
z
(i) = zi = (x + iy)i =
−y + xi =
"
−y
x
#
.
Ostatecznie
M
f
z
=
"
x
−y
y
x
#
.
Dla liczby zespolonej w postaci macierzy mamy nast¸epuj¸ac¸a jej postać trygonome-
tryczn¸a
"
x
−y
y
x
#
=
"
r
0
0 r
#
·
"
cos φ
− sin φ
sin φ
cos φ
#
.
Macierz
A =
"
a b
c d
#
nazywamy symetryczn¸a jeśli A = A
T
czyli b = c.
Macierz symetryczn¸a A nazywamy dodatnio określon¸a , co zapisujemy A > 0 jeśli
∀(x, y) ∈
2
\ {(0, 0)} ax
2
+ 2bxy + cy
2
>
0.
A > 0
⇔ ad − b
2
>
0, a > 0, d > 0.
Macierz kwadratow¸a B nazywamy ortogonaln¸a jeśli macierz transponowana B
T
jest
macierz¸a odwrotn¸a do B
B
· B
T
= B
T
· B = I.
Jedynymi macierzami ortogonalnymi wymiaru 2 s¸a macierze postaci
B =
"
cos φ
− sin φ
sin φ x cos φ
#
lub
19

B =
"
cos φ sin φ
sin φ
− cos φ
#
=
"
cos φ
− sin φ
sin φ cos φ
#
·
"
1 0
0
−1
#
.
W pierwszym przypadku mamy det B = 1 a w drugim det B =
−1.
20
Twierdzenie spektralne
Jeżeli A jest macierz¸a symetryczn¸a dodatnio określon¸a to istnieje macierz ortogo-
nalna C taka, że
A = C
·
"
λ
1
0
0 λ
2
#
· C
T
,
gdzie liczby dodatnie λ
1
, λ
2
s¸a wartościami własnymi macierzy A czyli pierwiastkami
równania
det(A
− λI) = 0 ⇔ λ
2
− (a + d)λ + ad − b
2
= 0.
Jeśli λ
1
6= λ
2
to macierz C jest dokładnie jedna i jest równa unormowanym warto-
ściom własnym
odpowiadaj¸acym λ
1
i λ
2
. Oznacza to, że
C =
"
a b
c d
#
,
A
"
a
c
#
= λ
1
"
a
c
#
,
A
"
b
d
#
= λ
2
"
b
d
#
oraz a
2
+ c
2
= 1, b
2
+ d
2
= 1.
Dla dodatnio określonej macierzy symetrycznej A istnieje jej pierwiastek kwadra-
towy
√
A = A
1
2
czyli macierz symetryczna dodatnio określona taka, że
A
1
2
· A
1
2
= A.
Jest ona zdefiniowana nast¸epuj¸aco
A
1
2
= C
·
"
√
λ
1
0
0
√
λ
2
#
· C
T
.
Twierdzenie o rozkładzie biegunowym.
Je´li macierz C jest nieosobliwa (det C
6= 0) to istniej¸a: dodatnio określona macierz
symetryczna A i ortogonalna macierz B takie, że
C = A
· B.
Szkic dowodu.
Przypuśćmy, że mamy rozkład C = A
· B. Wtedy
C
· C
T
= A
· B · B
T
· A
T
=
·A · A
T
= A
2
.
Macierz C
· C
T
jest symetryczna i dodatnio określona, st¸ad
A =
CC
T
1/2
.
Wtedy
B =
CC
T
−1/2
C
jest macierz¸a ortogonaln¸a.
Jeśli macierz A ma dwie różne wartości własne a niekoniecznie jest symetryczna to
dla niej również zachodzi twierdzenie spektralne je´li jest przemienna ze swoj¸a macierz¸a
transponowan¸a A
· A
T
= A
T
· A = I (mówimy, że A jest normalna):
21
A = C
·
"
λ
1
0
0 λ
2
#
· C
T
.
Wtedy również
A
n
= C
·
"
λ
n
1
0
0 λ
n
2
#
· C
T
.
Jeśli macierz A ma dwie różne wartości własne λ
1
, λ
2
a nie jest normalna to można
znaleźć macierz nieosobliw¸a B tak¸a, że
A = B
·
"
λ
n
1
0
0 λ
n
2
#
· B
−1
i A
n
= B
·
"
λ
n
1
0
0 λ
n
2
#
· B
−1
.
Jeśli λ
1
, λ
2
∈
to macierz B ma elementy rzeczywiste, s¸a one liczbami zespolonymi
gdy wartości własne A s¸a liczbami zespolonymi.
Ci¸
ag Fibonacciego.
Ci¸ag Fibonacciego F
n
określony jest warunkami
F
0
= 0, F
1
= 1, F
n+2
= F
n
+ F
n+1
.
Łatwo sprawdzamy, że wtedy
"
F
n−1
F
n
F
n
F
n+1
#
=
"
0 1
1 1
#
n
.
Wartościami własnymi macierzy
"
0 1
1 1
#
s¸a pierwiastki równania
λ
2
− λ − 1 = 0.
Łatwo obliczamy, że
λ
1
=
1
2
+
1
2
√
5, λ
2
=
1
2
−
1
2
√
5.
Macierz C ma postać
C =
1
√
1+λ
2
1
1
√
1+λ
2
2
λ
1
√
1+λ
2
1
λ
2
√
1+λ
2
2
.
Zadanie.
Podać wzór na F
n
.
22
Wyszukiwarka
Podobne podstrony:
Analiza matematyczna Wykłady, GRANICE FUNKCJI
Analiza matematyczna Wykłady, CIAGI LICZBOWE
Analiza matematyczna wykład(1)(1)
Analiza matematyczna. Wykłady CAŁKI NIEOZNACZONE
Analiza matematyczna. Wykłady GRANICE FUNKCJI
Analiza matematyczna, Analiza matematyczna - wykład, Ściąga z wykładów
Analiza matematyczna Wykłady, CAŁKI NIEOZNACZONE
Analiza matematyczna Wykłady, POCHODNE FUNKCJI
Wyklad-02-AM1, Analiza matematyczna, Analiza matematyczna, Wykłady
Wyklad-07-08-AM1, Analiza matematyczna, Analiza matematyczna, Wykłady
Analiza matematyczna. Wykłady TWIERDZENIA RACHUNKU RÓŻNICZKOWEGO
Analiza matematyczna. Wykłady CIAGLOSC FUNKCJI
Wyklad-04-AM1, Analiza matematyczna, Analiza matematyczna, Wykłady
Wyklad-10-AM1, Analiza matematyczna, Analiza matematyczna, Wykłady
Algebra i Analiza Matematyczna, wykład 1, 06 10 2001-10-09
Wyklad-09-AM1, Analiza matematyczna, Analiza matematyczna, Wykłady
więcej podobnych podstron