
Programowanie mikrokontrolerów
ATmega16
Marcin Engel
Marcin Peczarski
Instytut Informatyki Uniwersytetu Warszawskiego
17 września 2009

Poznajemy ATmega16
(XCK/T0) PB0
(T1) PB1
(INT2/AIN0) PB2
(OC0/AIN1) PB3
(SS) PB4
(MOSI) PB5
(MISO) PB6
(SCK) PB7
RESET
VCC
GND
XT
AL2
XT
AL1
(RXD) PD0
(TXD) PD1
(INT0) PD2
(INT1) PD3
(OC1B) PD4
(OC1A) PD5
(ICP1) PD6
P
A0 (ADC0)
P
A1 (ADC1)
P
A2 (ADC2)
P
A3 (ADC3)
P
A4 (ADC4)
P
A5 (ADC5)
P
A6 (ADC6)
P
A7 (ADC7)
AREF
GND
A
VCC
PC7 (T
OSC2)
PC6 (T
OSC1)
PC5 (TDI)
PC4 (TDO)
PC3 (TMS)
PC2 (TCK)
PC1 (SDA)
PC0 (SCL)
PD7 (OC2)

Architektura mikrokontrolera ATmega16
I
Procesor o zredukowanym zbiorze rozkazów (RISC)
I
Architektura little-endian
I
Architektura harwardzka (odrębne pamięci i magistrale dla
programu i danych)
I
16 kiB pamięci programu (pamięć flash)
I
1 kiB pamięci danych (SRAM)
I
32 rejestry ogólnego przeznaczenia
I
64 rejestry wejścia-wyjścia, układy peryferyjne
I
512 bajtów pamięci nieulotnej (EEPROM)
I
3 liczniki
I
21 przerwań (o ustalonej kolejności obsługi)
I
Interfejsy szeregowe: USART, I
2
C
I
8-kanałowy, 10-bitowy przetwornik A/C

Architektura, schemat blokowy
Flash
Program
Memory
Instruction
Register
Instruction
Decoder
Program
Counter
Control Lines
32 x 8
General
Purpose
Registrers
ALU
Status
and Control
I/O Lines
EEPROM
Data Bus 8-bit
Data
SRAM
Direct Addressing
Indirect Addressing
Interrupt
Unit
SPI
Unit
Watchdog
Timer
Analog
Comparator
I/O Module 2
I/O Module1
I/O Module n
Najprostszy układ
Podłączamy:
I
zasilanie (nóżki VCC, AVCC, GND),
I
układ reset (nóżka RESET),
I
złącze programatora (nóżki MOSI, MISO, SCK, RESET, VCC,
GND).
Wyjaśnienia:
I
VCC na schematach oznacza „+” zasilania (inne oznaczenie
to VDD),
I
AVCC oznacza „+” zasilania części analogowej,
I
GND to „−” zasilania,
I
RESET oznacza odwróconą logikę (tj. reset jest aktywny, jeśli
podamy niski poziom napięcia).

Zasilanie
I
Układ ATmega16 wymaga zasilania napięciem stałym
z zakresu od 4,5 do 5,5 V (wersja 16L od 2,7 V).
I
Nowsza wersja układu ATmega16A może być zasilana
napięciem z zakresu od 2,7 V do 5,5 V.
I
Zwykle stosujemy scalony stabilizator napięcia 5 V typu 7805.
1

Zasilanie, cd.
I
Schemat połączeń znajduje się w nocie katalogowej.
7805
V
in
V
out
1
2
3
I
Na płytce testowej znajduje się mostek prostowniczy
i stabilizator o regulowanym napięciu wyjściowym.
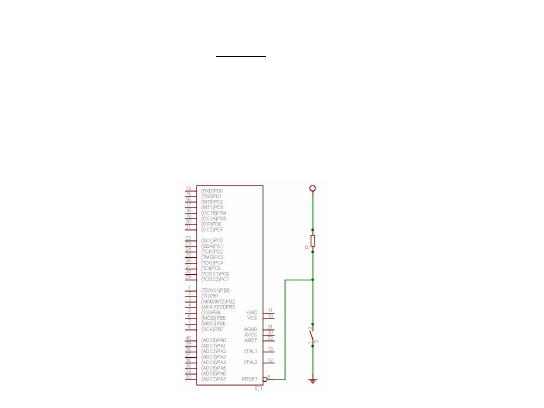
Układ resetu
I
Normalnie na nóżce RESET powinien być stan wysoki.
I
Chcemy móc ręczne zresetować urządzenie (np. przyciskiem).
I
Programator również musi móc zresetować układ.
I
Rezystor podciągający na ogół nie jest potrzebny (jest
wewnętrzny).
Rozwiązanie:

Przestrzeń adresowa
Są trzy rozdzielne przestrzenie adresowe:
I
pamięć danych
I
zorganizowana w bajty
I
rejestry ogólnego przeznaczenia
I
rejestry wejścia-wyjścia
I
SRAM
I
nieulotna pamięć danych
I
zorganizowana w bajty
I
EEPROM
I
dostęp przez rejestry wejścia-wyjścia za pomocą odpowiedniej
sekwencji rozkazów
I
pamięć programu
I
zorganizowana w słowa 16-bitowe
I
przy dostępie do rozkazów adresowana słowami
I
przy dostępie do danych adresowana bajtami
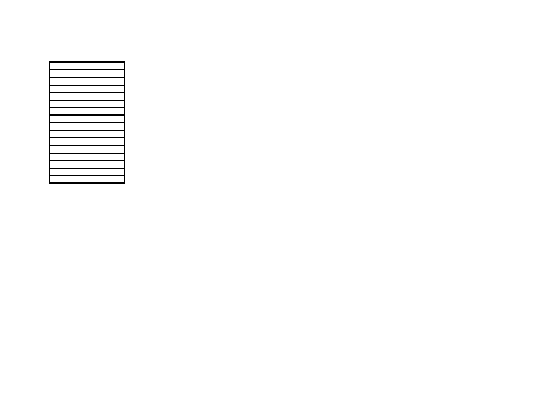
Rejestry
7
0
Addr.
R0 $00
R1
$01
R2
$02
…
R13
$0D
General
R14
$0E
Purpose
R15
$0F
Working
R16
$10
Registers
R17
$11
…
R26
$1A
X-register Low Byte
R27
$1B
X-register High Byte
R28
$1C
Y-register Low Byte
R29
$1D
Y-register High Byte
R30
$1E
Z-register Low Byte
R31
$1F
Z-register High Byte
I
32 rejestry 8-bitowe: R0, . . . , R31
I
W rozkazach z adresowaniem natychmiastowym można
stosować tylko rejestry R16, . . . , R31.
LDI R16, 123
SUBI R18, 5
I
Przesłania wartości są możliwe między każdą parą rejestrów.
MOV R3, R19
I
Operacje arytmetyczno-logiczne można wykonywać na danych
w dowolnych rejestrach.
ADD R9, R17
Rejestry
7
0
Addr.
R0 $00
R1
$01
R2
$02
…
R13
$0D
General
R14
$0E
Purpose
R15
$0F
Working
R16
$10
Registers
R17
$11
…
R26
$1A
X-register Low Byte
R27
$1B
X-register High Byte
R28
$1C
Y-register Low Byte
R29
$1D
Y-register High Byte
R30
$1E
Z-register Low Byte
R31
$1F
Z-register High Byte
I
Do adresowania pośredniego pamięci danych używa się par
rejestrów:
I
para rejestrów R27:R26 to rejestr X,
I
para rejestrów R29:R28 to rejestr Y,
I
para rejestrów R31:R30 to rejestr Z.
LD R16, X
ST Y, R17
I
Rejestr Z można stosować do adresowania pośredniego
pamięci programu (rozkazy LPM, SPM).

Rejestry
7
0
Addr.
R0 $00
R1
$01
R2
$02
…
R13
$0D
General
R14
$0E
Purpose
R15
$0F
Working
R16
$10
Registers
R17
$11
…
R26
$1A
X-register Low Byte
R27
$1B
X-register High Byte
R28
$1C
Y-register Low Byte
R29
$1D
Y-register High Byte
R30
$1E
Z-register Low Byte
R31
$1F
Z-register High Byte
I
Rejestry R24, . . . , R31 mogą być używane, do operacji na
danych 16-bitowych.
ADDW R25:R24, 3
I
Para rejestrów R1:R0 jest domyślnym miejscem wyniku
operacji mnożenia.
I
Możliwe są przesłania 16-bitowe między parami rejestrów.
MOVW R13:R12, R17:R16
I
Rejestry są mapowane na adresy od $00 do $1F w przestrzeni
adresowej danych.
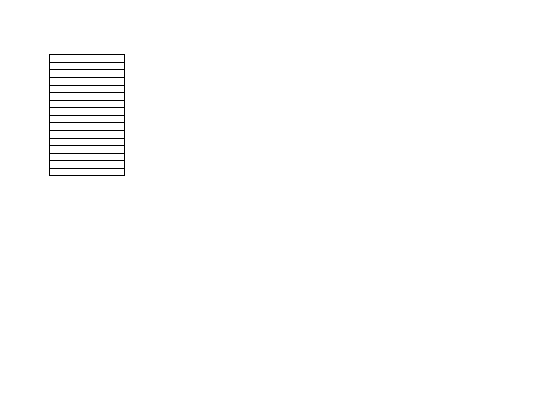
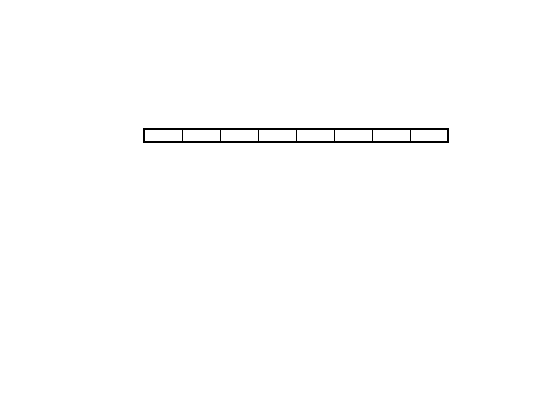
Pamięć wejścia-wyjścia
I/O Registers
$00
$01
$02
$3D
$3E
$3F
...
I
Zawiera 64 rejestry wejścia-wyjścia odpowiedzialne m.in. za
konfigurację poszczególnych układów wejścia-wyjścia (np.
rejestry PORTx, DDRx, SP, SREG).
I
Adresowane od $00 do $3F.
I
Adresy mapowane na adresy od $20 do $5F pamięci danych.
I
Zapis odbywa się za pomocą rozkazu OUT, a odczyt za
pomocą rozkazu IN.
I
Na pierwszych 32 rejestrach we/wy można bezpośrednio
ustawiać bity (rozkazy SBI, CBI) i je sprawdzać (rozkazy
SBIS, SBIC).
Rejestr stanu
I
Znajduje się w pamięci we-wy pod adresem SREG ($3F).
I
Jest uaktualniany po każdej operacji arytmetyczno-logicznej.
Bit
7
6
5
4
3
2
1
0
I
T
H
S
V
N
Z
C
SREG
Read/Write
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Initial Value
0
0
0
0
0
0
0
0
I
bit I – włączone przerwania
I
bit T – do przechowania dowolnego bitu (rozkazy BLD, BST)
I
bit H – przeniesienie z młodszego półbajta do starszego
I
bit V – nadmiar w arytmetyce uzupełnieniowej do dwóch
I
bit N – bit znaku wyniku operacji
I
bit S – bit znaku rzeczywistego wyniku operacji S = V ⊕ N
I
bit Z – wynikiem operacji jest zero
I
bit C – przeniesienie z najstarszego bitu

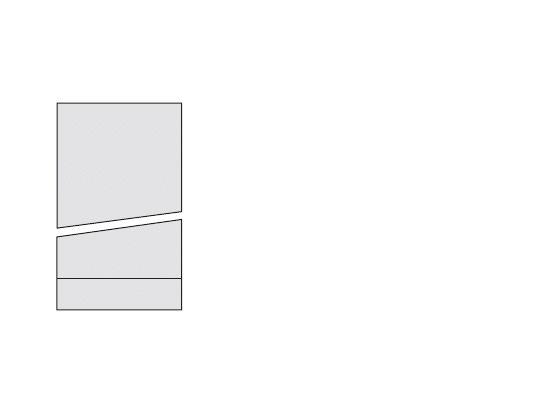
Pamięć danych – podsumowanie
I
Adresowana od $0000 do $045F (stała RAMEND)
I
1 kiB o adresach od $0060 do $045F to pamięć ulotna SRAM
I
Na adresy od $0000 do $005F są wirtualnie odwzorowane
rejestry ogólnego przeznaczenia i pamięć wejścia-wyjścia, np.:
rozkazy OUT $10, R18 oraz ST $30, R18 mają ten sam
efekt! Ale pierwszy działa szybciej.
R0
R1
R2
R29
R30
R31
I/O Registers
$00
$01
$02
...
$3D
$3E
$3F
...
$0000
$0001
$0002
$001D
$001E
$001F
$0020
$0021
$0022
...
$005D
$005E
$005F
...
$0060
$0061
$045E
$045F
...
Internal SRAM

Stos
I
Znajduje się w pamięci danych.
I
Przed wykonaniem jakiejkolwiek operacji na stosie programista
musi ustawić dwubajtowy wskaźnik stosu SP w pamięci we-wy.
I
Wskaźnik stosu SP składa się z dwóch rejestrów SPH i SPL.
I
Stos rośnie w dół pamięci (od wysokich adresów do niskich).
I
SP pokazuje zawsze na pierwszy wolny bajt pod wierzchołkiem
stosu.
I
Rozkaz PUSH odkłada jeden bajt na stos, a POP zdejmuje
jeden bajt ze stosu.
I
Wywołanie podprogramu (RCALL, CALL) odkłada dwa bajty
(adres powrotu) na stos, a powrót z niego (RET) zdejmuje
dwa bajty.

Typowa inicjacja stosu
LDI R16, HIGH (RAMEND)
OUT SPH, R16
LDI R16, LOW (RAMEND)
OUT SPL, R16

Nieulotna pamięć danych
I
Stanowi odrębną przestrzeń adresową.
I
Dostęp do niej odbywa się za pomocą specjalnych rejestrów
we-wy (EEAR, EEDR, EECR).
I
Protokół dostępu do tej pamięci poznamy w dalszej części
wykładu.
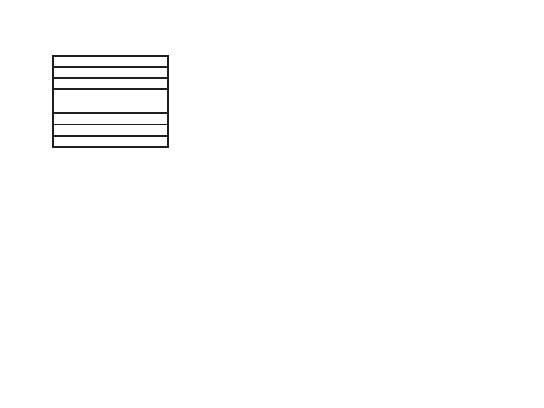
Pamięć programu
$0000
$1FFF
Application Flash Section
Boot Flash Section
I
Ma 16 kiB.
I
Jest podzielona na dwie części
z niezależną ochroną dostępu: boot
loader oraz część aplikacji.
I
Większość kodów rozkazów jest
2-bajtowa (1 słowo), ale są też
rozkazy 4-bajtowe (2 słowa).
I
Program może modyfikować sam
siebie.

Tryby adresowania
I
natychmiastowe: LDI R16, 3
I
bezpośrednie: LDS R1, 100
I
pośrednie: LD R1, X
I
pośrednie z postinkrementacją: LD R1, X+
I
pośrednie z predekrementacją: LD R1, -X
I
pośrednie z przemieszczeniem: LDD R1, Y+2
I
pośrednie pamięci programu: LPM R1, Z

Przerwania
I
Kod programu rozpoczyna się od wektora przerwań.
I
Zgłoszenie przerwania powoduje sprzętowe:
I
odłożenie na stos adresu powrotu (ale nie rejestru stanu!),
I
zablokowanie przerwań poprzez wyzerowanie bitu I w rejestrze
stanu SREG,
I
wykonanie rozkazu spod odpowiedniego adresu w pamięci
programu.
I
Program obsługi przerwania zwykle kończy się rozkazem
RETI, który włącza przerwania.

Wektor przerwań
Vector No.
Program
Address
Source
Interrupt Definition
1
$000
RESET
External Pin, Power-on Reset, Brown-out
Reset, Watchdog Reset, and JTAG AVR
Reset
2
$002
INT0
External Interrupt Request 0
3
$004
INT1
External Interrupt Request 1
4
$006
TIMER2 COMP
Timer/Counter2 Compare Match
5
$008
TIMER2 OVF
Timer/Counter2 Overflow
6
$00A
TIMER1 CAPT
Timer/Counter1 Capture Event
7
$00C
TIMER1 COMPA
Timer/Counter1 Compare Match A
8
$00E
TIMER1 COMPB
Timer/Counter1 Compare Match B
9
$010
TIMER1 OVF
Timer/Counter1 Overflow
10
$012
TIMER0 OVF
Timer/Counter0 Overflow
11
$014
SPI, STC
Serial Transfer Complete
12
$016
USART, RXC
USART, Rx Complete
13
$018
USART, UDRE
USART Data Register Empty
14
$01A
USART, TXC
USART, Tx Complete
15
$01C
ADC
ADC Conversion Complete
16
$01E
EE_RDY
EEPROM Ready
17
$020
ANA_COMP
Analog Comparator
18
$022
TWI
Two-wire Serial Interface
19
$024
INT2
External Interrupt Request 2
20
$026
TIMER0 COMP
Timer/Counter0 Compare Match
21
$028
SPM_RDY
Store Program Memory Ready

Kiedy pojawia się przerwanie RESET
Po włączeniu zasilania (power-on reset)
V
RESET
TIME-OUT
INTERNAL
RESET
t
TOUT
V
POT
V
RST
CC

Kiedy pojawia się przerwanie RESET
Na skutek resetu zewnętrznego
CC
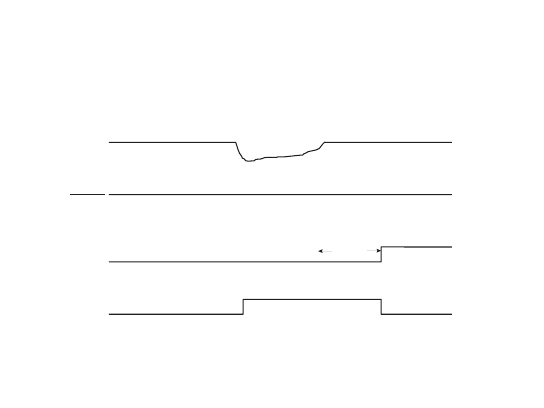
Kiedy pojawia się przerwanie RESET
Przy spadku napięcia (brown-out detection)
V
CC
RESET
TIME-OUT
INTERNAL
RESET
V
BOT-
V
BOT+
t
TOUT
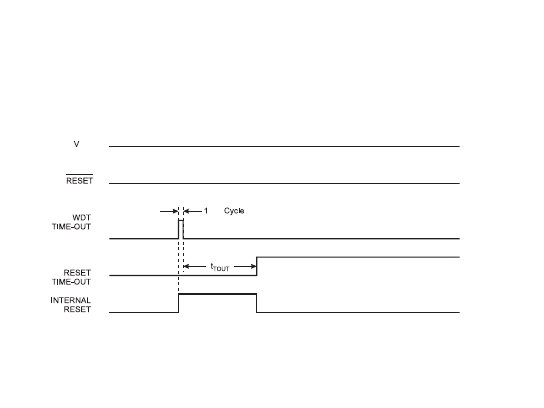
Kiedy pojawia się przerwanie RESET
Przy braku wyzerowania układu watchdog
CK
CC

Co się dzieje po resecie?
I
Ustawienie rejestrów we/wy na wartości początkowe
I
Rozpoczęcie wykonania programu od instrukcji znajdującej się
pod adresem 0 (przerwanie 0)

Pierwszy program
.CSEG
; segment kodu
.ORG 0
; przerwanie o adresie 0 = reset
JMP START
.ORG 42
; pierwszy adres za wektorem przerwań
START:
LDI R16, 0b00001111
OUT DDRA, R16
; nogi PA0..PA3 jako wyjścia
LDI R16, 0b00001011
OUT PORTA, R16
; nogi PA0,PA1,PA3 stan wysoki
; noga PA2 stan niski
PETLA:
RJMP PETLA
; główna pętla programu

Cykl wykonania instrukcji
I
Gdy nie ma skoków.
takt zegara
T1
T2
T3
T4
instrukcja 1
fetch
execute
instrukcja 2
fetch
execute
instrukcja 3
fetch
execute
I
Gdy instrukcja 1 wykona skok do instrukcji 3.
takt zegara
T1
T2
T3
T4
instrukcja 1
fetch
execute execute
instrukcja 2
fetch
instrukcja 3
fetch
execute
Cykl wykonania instrukcji, cd.
I
Gdy instrukcja 1 potrzebuje więcej taktów do wykonania.
takt zegara
T1
T2
T3
T4
instrukcja 1
fetch
execute execute
instrukcja 2
fetch
execute
I
Dokumentacja podaje liczbę taktów execute.
I
Z wyjątkiem dwóch instrukcji (SPM, BREAK) wszystkie
pozostałe potrzebują maksymalnie cztery takty execute.
I
Większość instrukcji potrzebuje jeden lub dwa takty execute.
I
Czas wykonywania programu jest w pełni przewidywalny –
brak spekulatywnego wykonywania instrukcji.

Jednostka arytmetyczno-logiczna ALU
I
Rozkazy arytmetyczne 8-bitowe wykonuje w jednym cyklu
zegara.
I
Rozkazy arytmetyczne 16-bitowe i rozkazy mnożenia wykonuje
w dwóch cyklach zegara.
I
Wspiera operacje na liczbach bez znaku, ze znakiem (notacja
uzupełnieniowa do dwóch) oraz ułamkowych
(stałoprzecinkowych).
I
Rejestr stanu (SREG) jest uaktualniany po każdej operacji
ALU.
Wyszukiwarka
Podobne podstrony:
Programowanie mikrokontrolerów ATmega16
Programowanie mikrokontrolerów 2 0 pl
ZL5PRG Programator mikrokontrol Nieznany
BIZNESPLAN dla programu promocj Nieznany (16)
AVR i ARM7 Programowanie mikrokontrolerow dla kazdego avrar7
Podstawy Programowania Mikrokontrolera 8051
Programowanie mikrokontrolerow 8051 w jezyku C
Galka Galka Podstawy Programowania Mikrokontrolera 8051
Podstawy programowania mikrokontrolera 8051
Program Konwergencji 2011 dla PL
Podstawy programowania mikrokontrolerów AVR8 w środowisku AVR Studio 4
Podstawy programowania mikrokontrolera 8051(300dpi)
Programowanie mikroprocesora Atmega, ELEKTRONIKA, ATMEGA(1)(1)
programowanie mikrokontrolerów
kurs programowania w języku ms basic, Programowanie mikrokontrolerów
PROGRAM KLUBU WIEWIÓRKA 16 - Kopia, Klub Wiewiórka
Podstawy programowania mikrokontrolera 8051
Programowanie mikrokontrolerów za pomocą programatora USBasp
więcej podobnych podstron