Renewable Energy 26 (2002) 157–168
www.elsevier.com/locate/renene
Design requirements for medium-sized wind
turbines for remote and hybrid power systems
A.L. Rogers, J.F. Manwell, J.G. McGowan
*
, A.F. Ellis
Renewable Energy Research Laboratory, Department of Mechanical and Industrial Engineering,
University of Massachusetts at Amherst, Amherst, MA 01003, USA
Received 8 May 2001; accepted 15 May 2001
Abstract
This paper provides an overview of the design requirements for medium-sized wind turbines
intended for use in a remote hybrid power system. The recommendations are based on first-
hand experience acquired at the University of Massachusetts through the installation, operation,
and upgrade of a 250-kW turbine on a mountain top with difficult access in Western Massachu-
setts. Experience with the operation of this turbine and the design of its control system, together
with a long history in the design and analysis of hybrid power systems, has made it possible
to extend the work in Western Massachusetts to remote or hybrid power systems in general.
The University test site has many attributes of more remote sites and the overall wind turbine
installation is typical of one that could power a hybrid wind system. For example, access to
the site is limited due to steep terrain, snow, and environmental restrictions. Also, the power
lines feeding the turbine exhibit voltage sags and phase imbalance, especially during start-up.
This paper is based on the experience gained from the operation of this wind turbine and
assesses the requirements for the design and operation of medium to large wind turbines in
remote locations. The work summarizes lessons learned relative to: (1) sensors, communi-
cation, and control capabilities; (2) grid connection issues; and (3) weather-related problems.
The final section of the paper focuses on design requirements to ensure successful installation
and the completion of maintenance and repairs at remote sites.
2001 Elsevier Science Ltd.
All rights reserved.
Keywords: Wind energy; Wind systems; Wind turbines; Remote power systems; Hybrid power systems
* Corresponding author. Fax:
+
1-413-545-1027.
E-mail address: jgmcgowa@ecs.umass.edu (J.G. McGowan).
0960-1481/02/$ - see front matter
2001 Elsevier Science Ltd. All rights reserved.
PII: S 0 9 6 0 - 1 4 8 1 ( 0 1 ) 0 0 1 2 6 - 4

158
A.L. Rogers et al. / Renewable Energy 26 (2002) 157–168
1. Introduction
Wind turbines are one of the fastest growing sources of power in the world today
[1]. Over the past twenty years, there has been a great deal of effort connected to
the design of wind turbines, control systems, and energy storage systems to enable
wind generation to be used in remote or hybrid power applications. ‘Remote’ means
that the machine is difficult to access and that it may be far from major population
centers. Hybrid refers to electrical generation not connected to a large central grid,
utilizing multiple types of generators. For example, simple hybrid systems often
include a diesel generator used in combination with a wind turbine. The University
of Massachusetts (UMass) has been directly involved in research on and the design
of such systems for about twenty years [2]. Despite the apparent economic attractive-
ness of wind turbines for remote hybrid power systems, there have been relatively
few such systems installed, particularly using larger wind turbines, other than a few
experimental or demonstration projects.
Recently, as part of its wind energy program, UMass Renewable Energy Research
Laboratory installed and began operation of a medium-sized wind turbine (250 kW)
in a relatively remote location of Western Massachusetts. Although not intended to
be part of the UMass hybrid power system activities, it turned out that the experi-
ences derived from this installation are of definite relevance to remote hybrid power
systems in general.
The machine was installed on the summit of a ridge (Mt Tom) in Holyoke.
Although not far from the University (about 15 km), this site suffers from numerous
problems often associated with remote wind turbine installations. These include a
weak grid, weather extremes, difficult access, and a limited maintenance budget.
Using this site as an experimental laboratory, researchers from UMass have carried
out experimental studies related to wind turbine controls and dynamics in hybrid
power and remote wind turbine systems. As described in this paper, experiences
with this wind turbine have been used to develop requirements for successful wind
turbine operation of medium-sized (50 to 500 kW) wind turbines connected to hybrid
power systems or remote grids. This work has yielded direct experience with the
following problems that affect turbines in remote grid-connected sites or in hybrid
power systems:
1. Access—It is often difficult and costly to get heavy equipment, tools, and parts
to the site.
2. Lack of an on-site operator—The site suffers from lack of eyes, ears, and on-site
expertise to monitor operation and to detect developing or intermittent problems.
3. Weak grids—Grid conditions are subject to disturbances from interconnected
equipment and turbine operation.
4. Extreme weather—Extreme weather may be found at any site, but weather damage
is difficult to repair at remote sites.
5. Lack of outside expertise—Poor availability, high cost, and time delays limit get-
ting help from outside expertise.
Each of these factors makes operation and maintenance at remote sites difficult.

159
A.L. Rogers et al. / Renewable Energy 26 (2002) 157–168
Experience with the UMass wind turbine shows that the ease of turbine maintenance
and repair is one of the most important turbine design requirements. Turbine mainte-
nance and repairs can be extremely difficult, costly, and time-consuming at remote
sites. Obviously, overall turbine reliability is also an important factor, reducing the
need for downtime. Nevertheless, even with a reliable turbine, bad weather, lack of
parts, lack of expertise, transportation difficulties and poor design practices can result
in a significant reduction in availability when repairs and maintenance need to be per-
formed.
2. The wind turbine and research site
2.1. ESI-80 turbine
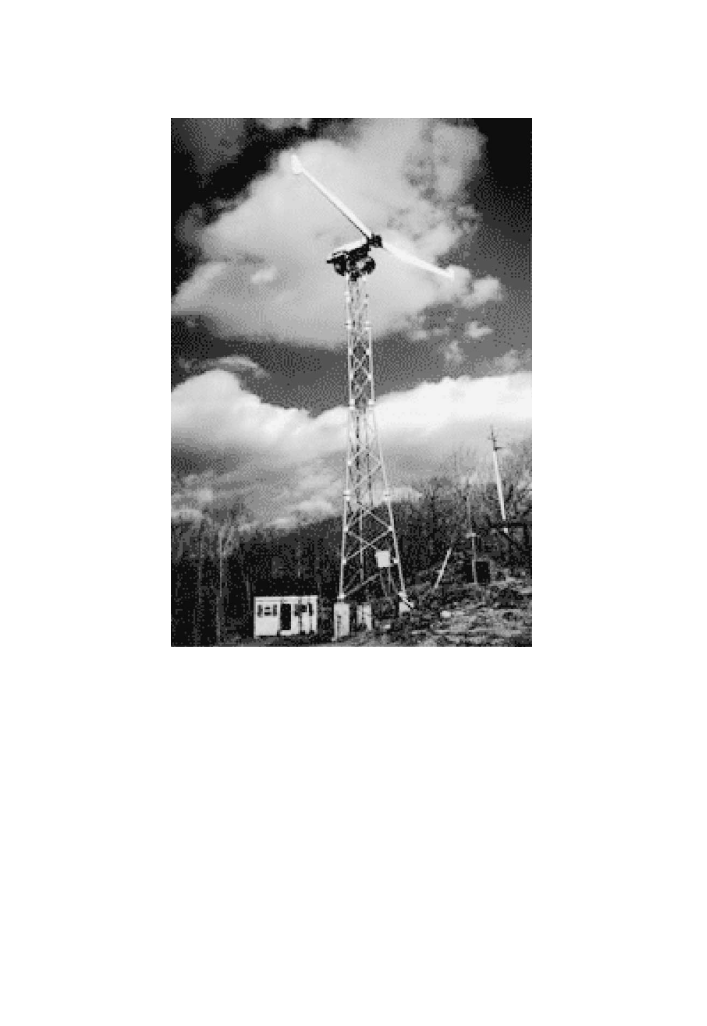
The UMass wind turbine, shown in Fig. 1, was first installed in the Altamont Pass
in California. It was moved to Massachusetts in 1991 and re-installed on Mt Tom
in Holyoke, MA, in 1994 [3–6]. It was the prototype of about 80 turbines that were
produced. The 250-kW ESI-80 has a horizontal axis, fixed pitch, stall-regulated rotor
and is connected to a 480-V, three-phase, induction generator via a fixed-ratio, two-
stage planetary gearbox. The combination of a two-bladed, downwind, teetered rotor,
planetary gearbox, clutch-type high-speed shaft brake, and aerodynamic tip brakes
results in a high power to weight ratio. The relatively lightweight design offers the
benefits of ease of installation, low capital cost, and, in theory, a low cost of energy.
In addition, turbine repairs are facilitated by a tilt-down lattice tower that is lowered
to the ground with two winches installed permanently at the site.
2.2. The Mt Tom wind turbine site
The topography of the Mt Tom site significantly affects site access and the wind
resource. The Mt Tom ridge, running north–south, rises approximately 183 m (600
ft) above the surrounding terrain. At this site, the east slope is relatively gradual,
but the western face is very steep. The turbine is located close to the western face,
in a slight saddle. Access to the site is only via a gravel road up the eastern slope.
The gravel road is steep enough that only a four-wheel drive or tracked vehicle can
climb it, and even then only when the road is not too wet or snow covered. The road
ends 50 m from the base of the turbine at a vernal pond which, due to environmental
regulations, can only be crossed in late summer and fall after it has dried out. Other-
wise a foot trail, which extends from the top of the road to the turbine, must be used.
Winds tend to be highest in the winter, at which time the predominant direction
is from the west and northwest. During other months, the winds come from the
southwest much of the time. Occasional storms come from the northeast. Wind gusts
as high as 42 m/s (94 mph) have been recorded at the site. The overall effect of the
topography and tree cover is a significant speed-up (two to three times) of the winds
from westerly directions and high wind shear. Winds from the west have a significant
vertical component.
160
A.L. Rogers et al. / Renewable Energy 26 (2002) 157–168
Fig. 1.
The UMass ESI-80 wind turbine.
The grid connection consists of a 1.5-km-long 4800-V three-phase line that termin-
ates in a stepdown transformer close to the wind turbine. The 4800-V line supplies
power to the lights and lifts of a ski area (closed at the present time) on the eastern
slope of the ridge, and to a number of communication towers also located on the
ridge summit. The power from the wind turbine originally supplied the ski area.
Now it goes to the communications towers or enters the local power grid.
3. Turbine operating experience and system improvements
Turbine availability during the six years of turbine operation on Mt Tom has been
far lower than anticipated. This low availability had a number of sources, including
the following:

161
A.L. Rogers et al. / Renewable Energy 26 (2002) 157–168
1. Deficiencies intrinsic to the original design, unrelated to climate or site issues
2. Design deficiencies related to cold weather operation
3. Design deficiencies related to isolated operation
4. Long lead times for repair due to site access, special tooling requirements, and
spare parts acquisition
5. Adverse weather.
Numerous system improvements have been implemented and much experience
has been gained during the past six years of operation. These include component
design improvements and repair or replacement of major system components.
Examples of system improvements include redesign of the turbine hub [7], the repair
of the turbine’s planetary gearbox and the installation of a yaw damping system.
The gearbox work, documented in [8], resulted in the replacement of the turbine’s
gearbox and the development of design recommendations for gearbox’s similar to
the ESI-80’s. A recent experimental development program on a yaw damping system
[9] was intended to solve some of the major problems associated with the original
free yaw system. In addition, numerous spare parts have been accumulated and a
removable tower-mounted crane was designed and built.
4. Lessons learned for remote operation
A number of lessons related to remote operation of medium-sized wind turbines
have been learned from the operating experience on Mt Tom. Based on that experi-
ence, requirements for operation and maintenance of remote wind turbines are
reviewed in this section. The discussion focuses on issues related to (1) the control,
communication, and sensor capabilities necessary for remote operation, (2) grid con-
nection issues, (3) weather-related problems, and (4) successful completion of main-
tenance and repairs at a remote site.
4.1. Control, communication, and sensors
Reliable operation of remote wind turbines connected to hybrid power systems or
remote grids places special requirements on the turbine control, communication, and
sensor systems. These requirements include the need for:
1. Information for analyzing turbine performance and operation and for identifying
operational problems
2. Controller flexibility and user friendliness
3. Adequate controller and sensor design to protect against problems
4. Remote control and access to information.
In addition to these considerations, which will be discussed next, when the wind
turbine is part of a hybrid power system the controller needs to be able to interface
with the system controller.

162
A.L. Rogers et al. / Renewable Energy 26 (2002) 157–168
4.1.1. The need for information
Remote operation without on-site operators increases the need for (1) reliable and
adequate performance and operating information, and (2) information to identify and
trouble-shoot current and potential problems. This requires appropriate data collec-
tion and communication capability. Also, data from medium-sized turbines in hybrid
power systems is especially important because there are relatively few such instal-
lations in the world. Detailed information can be useful in evaluating and improving
the design of the overall system.
Performance and operating data should be adequate to verify correct turbine oper-
ation, identify site-specific issues, warn operators of required upcoming maintenance,
identify and alert personnel of emergency situations and, when needed, provide data
to diagnose problems. Most information requirements may only require 10-minute
averages, standard deviations, and maximums and minimums of operating para-
meters. At times, relatively high-frequency data may be needed to identify the cause
of specific operating problems. One method adopted at the site is the implementation
of a file of high-frequency data dubbed the ‘black box.’ The latest 10 seconds of
high-frequency operating data are stored in a file which is written to disk if the
turbine stops for any unexpected reason. In this manner operating data prior to,
during, and after stopping can be analyzed.
Site-specific issues that the controller needs to identify include those related to
the behavior of the grid connection, environmental factors, and the wind field at the
site. For example, the local topography and tree cover at the turbine site caused
two significant operating problems. Winds from the northeast, while rare, are often
associated with storms, resulting in high, very turbulent, winds. The control algorithm
that had originally been used to decide when to run in most winds was inappropriate
in these winds. Owing to the nature of the turbulence and the turbine response, it
was decided to shut down when the wind is from the northeast. In addition, because
of the uneven topography north of the site, northerly winds can rotate the parked
turbine about the yaw axis continuously in one direction. Under certain conditions
this results in rapid cable wrapping, endangering the turbine droop cables and con-
nections. These kinds of issues attain a higher significance when there are no nearby
operators to identify problems or to correct them in a timely manner. Thus, adequate
data collection must be provided to be able to identify these unanticipated problems.
Once the data are collected they must be communicated to system operators. This
may be done using phone lines, line-of-sight microwave communication or satellites
for particularly remote locations. The UMass site uses standard PCs for control that
communicate via modems with computers at the university. The data can then easily
be viewed or graphed. When emergency intervention is required (for example if the
cable wraps are increasing rapidly), the controller on the mountain calls a pager and
sends a code to an operator who then must go to the site as soon as possible.
4.1.2. Controller flexibility
Successful remote operation requires a flexible, user-friendly controller. When
problems occur, local personnel should be able to easily modify the operating para-
meters of turbine operation. Ideally, this includes a transparent code and an easy-

163
A.L. Rogers et al. / Renewable Energy 26 (2002) 157–168
to-use platform, allowing code revision and additions that might prove necessary.
The code should also allow adjustment of data collection rates and the amount of
the data that is communicated to the system operator. In addition, downtime caused
by operating issues that arise is significantly reduced when modification of the con-
troller is in the hands of the local system operators. The UMass controller was written
in MS Visual Basic, operating on a conventional PC. This has proven to be a very
flexible and appropriate platform for the situation.
4.1.3. Controller and sensor design
Experience with the UMass wind turbine has indicated that sensors should include
measurements of performance parameters such a real and reactive power, wind speed
and direction, wind shear, and grid conditions. Operating parameters depend on the
turbine design, but might include: actuator positions, pressures, levels, temperatures,
blade azimuth, teeter angle, ambient temperature, machine vibrations, forces or tor-
ques, yaw error, and relay states.
Sensors may fail, just as machine parts can fail. This raises the question of the
usefulness of sensor redundancy and the interpretation of measured parameters. In
the control system, the decision was made to find sensors which were as robust as
possible and to include a variety of different sensors that might provide independent,
but different, measures of operating problems. This minimizes issues of the interpret-
ation of different signals from duplicate sensors and relying on just one type of
sensor technology that might turn out to have problems.
In addition, the controller and sensor system needs to be designed to successfully
identify and respond to any failure mode that might arise. This includes mechanical
and electrical failures, grid failures and controller logic and computer failures.
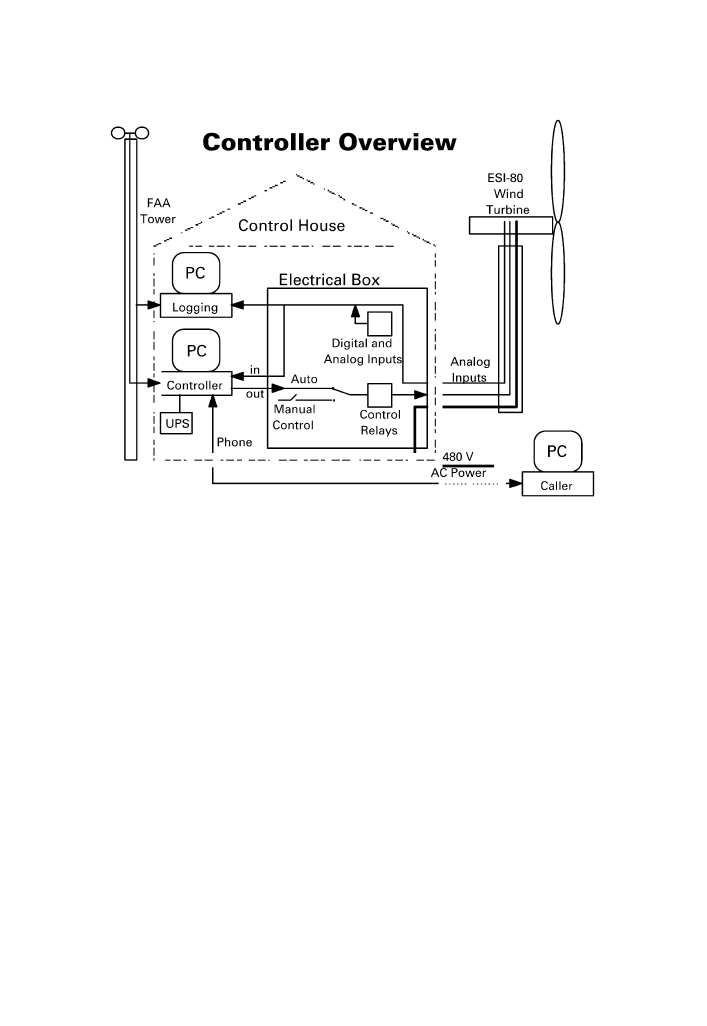
Accordingly, recent work at UMass has concentrated on basic controller design and
the development of a comprehensive wind turbine controller testing environment
[10–12]. A description of the redesigned control system is given in [9]. Fig. 2
presents a schematic of the complete control and monitoring system.
The design process for the new controller began with a failure modes and effects
analysis (FMEA). This analysis, described by Bird [10], consisted of analyzing plaus-
ible failure modes and their consequences for each of the components. The likelihood
of the failures and their consequences was then used as a guide in the selection of
parameters to be measured and decisions to be made. The analysis included the
effects of faulty control code and hardware, such as relays and actuators. As a result
of this analysis, the turbine control system now includes about 20 sensors, an uninter-
ruptible power supply (UPS) for critical sensors and the controller, and hardware
circuitry to shut down the turbine in case of a computer failure.
4.1.4. Remote control
A wind turbine controller in a hybrid power system needs the ability to communi-
cate with the supervisory control system. For a ‘simple turbine’ such as the ESI-80,
the communication from this machine may only contain such information as the
machine’s status (on, off, starting, off due to problems, reset required, etc.), and
power generation (for calculating net load, etc.). The communication must be able
164
A.L. Rogers et al. / Renewable Energy 26 (2002) 157–168
Fig. 2.
Schematic of control and monitoring system.
to receive such information as OK to start, shut down normally, and emergency
shutdown. Other turbines, for example those with pitch control, could accept com-
munications regarding maximum allowed power levels.
4.2. Grid connection
The turbine–grid connection can have a significant effect on turbine operation. If
the grid is weak, significant voltage fluctuations and interactions with other equip-
ment on the grid can occur. These conditions are often found at the end of a long
power line or in hybrid power systems. Under such conditions, provision should be
made to ensure that the turbine can operate correctly and safely and that maintenance
and repair procedures are not affected by grid conditions.
Safe turbine operation in weak grids requires the use of current-limiting (‘soft
start’) circuitry to limit voltage fluctuations and phase imbalance during grid connec-
tion. Under these circumstances, the controller may need to be modified slightly to
accept lower grid voltages and to avoid shutdown due to phase imbalance during
starting. Controller operation should also be reviewed to ensure that brief periods of
grid loss do not result in undesirable operating states.
Maintenance and repair procedures may require significant power from the grid
or may, for example, require three-phase power at a different voltage level than the
turbine–grid connection provides. If repair equipment requires too much power, then

165
A.L. Rogers et al. / Renewable Energy 26 (2002) 157–168
alternatives need to be found. In the event that repairs need to be made during periods
in which a phase is down or when the local grid connection is also being repaired,
emergency single-phase transformers and phase converters or a backup generator
may be needed to complete repairs.
4.3. Weather-related problems
Remote turbine operation in regions of extreme weather requires a robust design
with measures to deal with weather-related problems such as ice, excess moisture,
and lightning.
In colder climates, icing causes a number of problems, but those that matter the
most relate to the operation or shutdown of the turbine, or to prevent it from operating
if there is too much ice. Significant problems here include imbalance of the rotor,
frozen anemometers (or ones reading too low), too little generation or motoring,
danger from flying pieces of ice, or damage to the machine itself (i.e. the blades).
Recent UMass work [13] has summarized the effects, and options for mitigation, of
the icing of wind turbines in northern climates.
Rain and moisture can cause corrosion, increased friction in moving parts due to
corrosion, and malfunctioning electronics. Heaters or desiccants may be required to
keep systems ice-free, dry and properly operating.
Lightning protection is also required. Lightning may strike a wind turbine or blade,
causing severe damage that requires an emergency system shutdown. Proper ground-
ing helps to avoid this or to reduce damage from a strike. Lightning may also damage
equipment through electrostatic discharge and voltage transients resulting from dis-
tant lightning strikes. Isolation transformers and lightning protection components for
electronic circuits such as transient voltage surge suppressers (TVSSs), and gas tube
surge arrestors can significantly improve the survivability of electronics when light-
ning strike occurs. These measures are all intended to reduce the likelihood of down-
time caused by extreme weather conditions, especially where extreme weather con-
ditions can hamper otherwise routine repair jobs.
4.4. Operation, maintenance, and repair
The difficulties, costs, and time associated with transporting personnel, tools, and
parts to remote sites require that maintenance and repair capability, as much as poss-
ible, be included at the site. This requires (1) an inventory of parts and tools at the
site, (2) a turbine designed to be easily maintained, and (3) heavy-lifting capabilities.
Successful on-site maintenance requires a collection of all the tools that are needed
for turbine repair at the site. This includes hand and power tools as well as custom-
made tools. Custom-made tools can often allow maintenance or repair of items that
would otherwise need to be moved to a shop. A complete selection of manuals for
the turbines and tools and a set of turbine drawings are also needed.
Field maintenance and repair require, above all, a wind turbine that was designed
for easy maintenance. This requires that there be easy access to all parts of the
turbine, that performing adjustments and the replacement of wearable parts be care-

166
A.L. Rogers et al. / Renewable Energy 26 (2002) 157–168
fully planned for the least effort and the least use of heavy equipment. Ideally, even
the replacement of turbine parts that are not expected to fail should be as easy as
possible. If the nacelle needs to be removed for maintenance, it should be easy to
handle. Design for easy maintenance should include built-in lifting systems for heavy
objects, special tools, and easy methods for adjustment and alignment of parts. In
addition, simple design details or changes that may be insignificant in terms of
material, time or cost may make maintenance at a remote site significantly easier.
Of the numerous mechanical design improvements incorporated into the UMass
turbine, many can be characterized as self-aligning, self-fixturing, or as having instal-
lation and removal tools built into the design. The following examples from the
experience with this turbine illustrate this point.
1. The bearings on the teeter pins require frequent replacement or readjustment. This
is due to a combination of abrasive wear on the bearing material and corrosion
of the pins. The bearing end cap was originally designed without seals to help
keep moisture out. Rust forms on the pin, acts as an abrasive, and causes the
bearing to fail. Removal is difficult because the bearing becomes seized to the
pin and needs to be pulled off with either pry bars or a hydraulic ram. The fix
included the incorporation of a weather seal to reduce rust formation and the
addition of threaded holes on the bolting flange so that when the end cap needs
to be removed, bolts can be used as jackscrews to remove it.
2. The hydraulic damper system on the teetering hub has required frequent rebuilding
due to leakage of nitrogen (used as a return spring) and hydraulic oil and due to
wear of internal plastic parts and the damper main shaft. A permanent solution to
the internal wear problem requires an extensive redesign of the damper. Therefore,
maintainability features were added to speed removal, disassembly, rebuilding,
and re-installation of the damper. An attachment point on the nacelle was added
to support the damper during removal and installation, a sacrificial wear collar
was installed to protect the main shaft, the internal gas spring was replaced with
an external mechanical spring, and special tools were fabricated to aid rebuilding.
3. The ESI-80 uses a one-piece fiberglass nacelle cover. While sleek and weather
resistant, it is very difficult to remove. Even a trivial operation such as checking
the oil level could require hours to remove this cover. Maintainability was signifi-
cantly improved by adding hatches to get at the most frequently needed areas
(electronics, brake, and oil pump). An improved nacelle cover is currently being
designed that allows for complete removal, with its own lifting system, for sig-
nificant maintenance tasks.
Some maintenance will require heavy lifting capabilities, which should also be
ready on-site. At this turbine a small array of lifting straps, come-alongs, and pulleys
have been assembled with booms for lifting points (some permanently attached to
the turbine) in appropriate locations. The ESI-80 was originally designed with a
built-in, tilt-down capability. This has proven to be useful for many maintenance
tasks, such as blade repair, damper removal, bearing adjustments, etc. Though con-
sidered a lightweight wind turbine design, several components (the gearbox, gener-
167
A.L. Rogers et al. / Renewable Energy 26 (2002) 157–168
ator, hub, and brake) are massive enough to be troublesome at a remote site. For
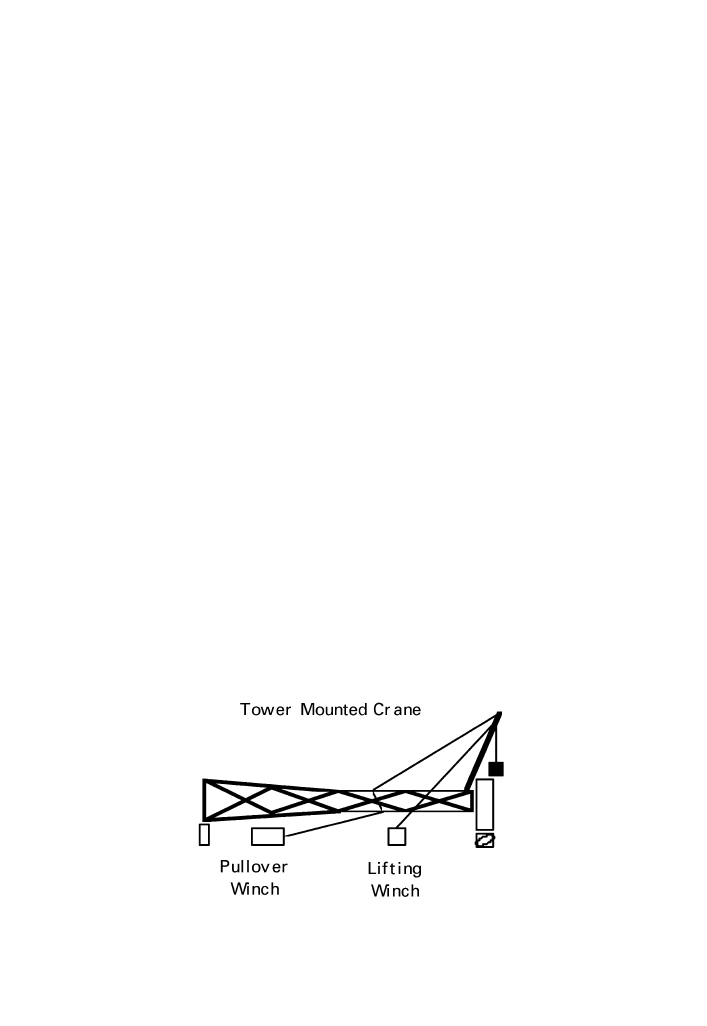
these large items, a crane is often needed. Because of the limitations imposed by
road access, a small tower-mounted crane was designed for use once the tower is
lowered to the ground. The crane is capable of removing everything on the tower
top, including the 1900-kg gearbox. Parts of the crane remain permanently attached
to the lattice tower. The main boom is designed to be attached to the tower and
raised without too much difficulty. Moving the boom fore and aft and raising and
lowering loads on the cable are accomplished using the pullover winch from the tilt-
down tower system and another dedicated winch. The crane is illustrated in Fig. 3.
5. Conclusions
In summary, the following general conclusions can be drawn from the UMass
wind turbine operating experience:
1. Maintenance and repair are critical issues.
2. One should avoid installation of wind turbines at remote locations that have no
long-term operating experience in similar sites.
3. Moderately large machines may be useful for remote locations (up to at least 500
kW) if the design is clever and ‘self-maintainable.’
4. Easy maintenance requires self-aligning, self-fixturing designs, with installation
and removal tools built into the design.
5. Lifting capability needs to be located at the site.
6. On-site tools, custom tools, and replacement parts need to be available.
7. Backup generation is required for periods when the grid is down.
8. Tilt-down towers greatly improve ease of maintenance.
9. The control system should be capable of remote control. It should be readily
maintained and upgradable, include redundancy and ensure safe operation under
all foreseeable conditions.
Fig. 3.
Tower crane schematic.

168
A.L. Rogers et al. / Renewable Energy 26 (2002) 157–168
Acknowledgements
Both the Massachusetts Division of Energy Resources and Northeast Utilities sup-
ported portions of this work.
References
[1] McGowan JG, Connors S. Windpower—a turn of the century review. Environmental Reviews
2000;November.
[2] McGowan JG, Manwell JF. Hybrid wind/diesel/PV system experiences. Renewable Energy
1998;16(1-4):928–33.
[3] Musial WD, Butterfield CP, Handman D. ESI-80/EPRI test program, EPRI Research Project RP1996-
14. Final report draft, Electric Power Research Institute, 1985.
[4] Baring-Gould I, Ellis AF, Manwell JF, Stein WM. Bringing wind power back east: redesign, instal-
lation, and initial operating results for the original ESI-80 in Massachusetts. In: Proceedings of the
AWEA Annual Conference, 1995:489–98.
[5] Manwell JF, Stein WM, McNiff BP. Bringing wind power back east: a new life for the original
ESI-80 in Massachusetts. In: Proceedings of the AWEA Annual Conference, San Francisco (CA),
1993:578–85.
[6] Manwell JF, Rogers AL, Ellis AF, Goldstein D. Operational experience with a 250 kW teetered
rotor wind turbine on an inland New England ridge top. In: Proceedings of the 1998 ASME Wind
Energy Symposium, January, 1998:201–11.
[7] Ellis AF. A forensic engineering analysis and redesign of the UMT-80 proto-1 hub. Master’s Project,
University of Massachusetts, Amherst, 1997.
[8] Manwell JF, Rogers AL, Abdulwahid U, Ellis AF, McNiff BP. Wind turbine gearbox evaluation.
In: Proc. EWEC ’99, 1999:695–8.
[9] Manwell JF, Rogers AL, Ellis AF, Abdulwahid U, Solomon M. Experimental investigation of yaw
damping on a downwind turbine. In: Proceedings of the 20th ASME Wind Energy Symposium,
2001:184–193.
[10] Bird C. ESI-80 automatic controller design and development. M.S. project report, Department of
Mechanical Engineering, University of Massachusetts, Amherst, 1996.
[11] Manwell JF, Rogers AL, Abdulwahid U, Driscoll J. Computer control for remote wind turbine
operation. In: Proc. of the AWEA Annual Conference, Austin (TX), 1997:611–20.
[12] Goldstein D, Manwell JF, Rogers AL. Development of a wind turbine controller testing environment.
In: Proceedings of AWEA ’98, 1998:41–50.
[13] Lacroix A, Manwell JF. Icing of wind turbines: effects and options for mitigation. In: Proceedings
of CANWEA Annual Meeting, 1999.
Wyszukiwarka
Podobne podstrony:
Automatic reactive power control of wind diesel micro hydro autonomous hybrid power systems
Time Series Models For Reliability Evaluation Of Power Systems Including Wind Energy
Design of the Zephyros Z72 wind turbine with emphasis onthe direct drive PM generator
Variable Speed Control Of Wind Turbines Using Nonlinear And Adaptive Algorithms
Tesla Wind Turbine Grid Connection And Interaction
Advanced Methods for Development of Wind turbine models for control designe
Boost Converter Design For 20Kw Wind Turbine Generator
Design Of Direct Driven Permanent Magnet Generators For Wind Turbines
CEI 61400 22 Wind turbine generator systems Required Design Documentation
Blade sections for wind turbine and tidal current turbine applications—current status and future cha
Innovative Solutions In Power Electronics For Variable Speed Wind Turbines
Modeling Of The Wind Turbine With A Doubly Fed Induction Generator For Grid Integration Studies
Development of wind turbine control algorithms for industrial use
Compliant Blades For Wind Turbines
CEI 61400 22 Wind turbine generator systems Required Design Documentation
0 Alternative Composite Materials for Megawatt Scale Wind Turbines Griffin Ashwill 2003
Development Of A Single Phase Inverter For Small Wind Turbine
The Material Selection for Typical Wind Turbine Blades 2006
więcej podobnych podstron