Prof. Edmund Wittbrodt
Równania różniczkowe ruchu postępowego, obrotowego i płaskiego bryły
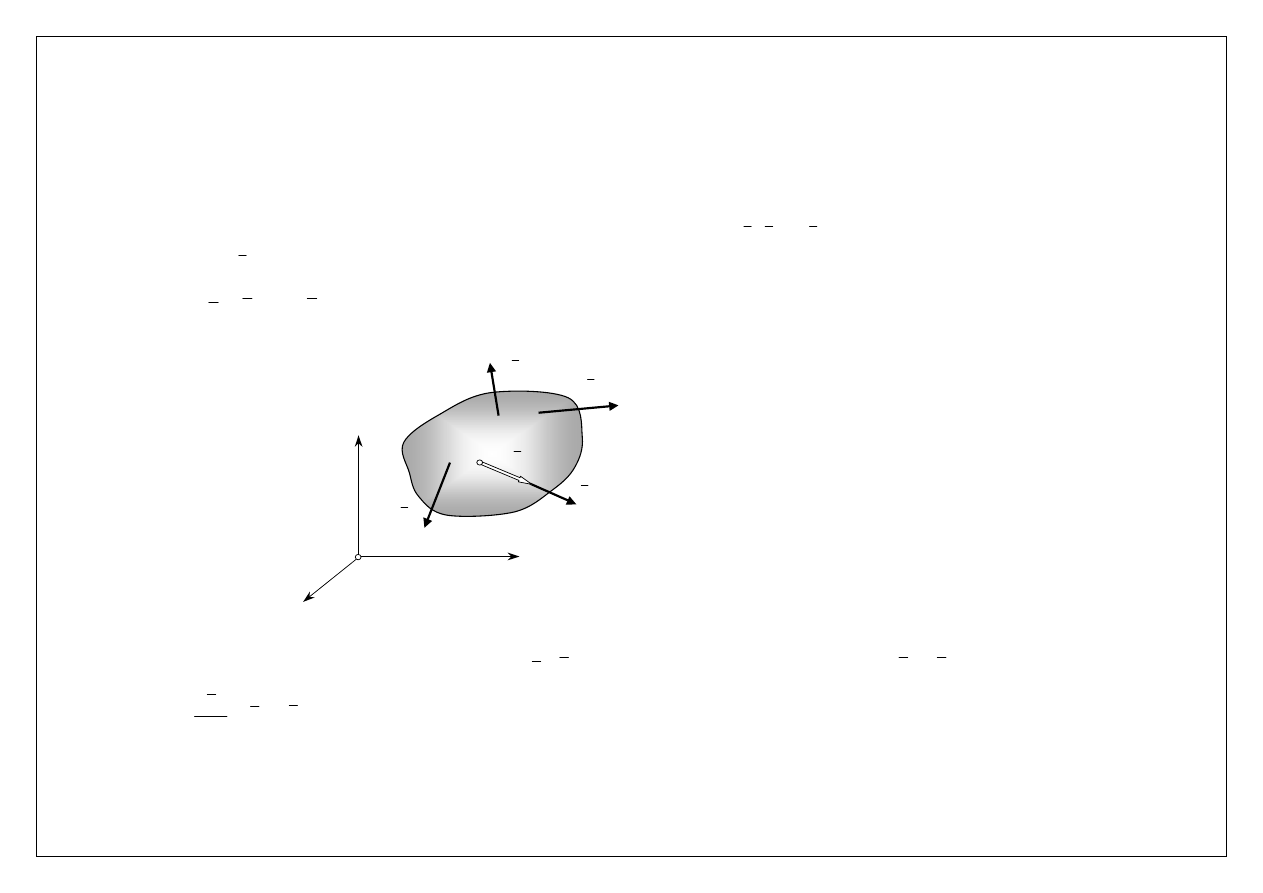
Ruch postępowy bryły
Równania różniczkowe ruchu. Jeżeli ciało, do którego przyłożono siły
1
2
,
, ...,
n
P P
P
, porusza się ruchem postępowym, to
przyspieszenie
a
tego ciała obliczamy z twierdzenia o ruchu środka masy
1
=
=
=
∑
n
C
i
i
ma
W
P
Bryła w ruchu postępowym
Ponieważ ciało porusza się ruchem postępowym (
0
ω
=
), to kręt ciała względem środka masy
0
C
K
=
, a zatem
0
C
C
dK
M
dt
=
=
.
Powyższy warunek musi być spełniony, jeżeli ciało ma poruszać się ruchem postępowym.
O
C
z
y
x
2
P
1
P
n
P
a
W
Prof. Edmund Wittbrodt
Przy opisie ruchu postępowego we współrzędnych prostokątnych
równania różniczkowe ruchu postępowego
zapisujemy w
postaci trzech równań skalarnych:
=
&&
C
Cx
mx
W
,
=
&&
C
Cy
my
W
,
(4.66)
=
&&
C
Cz
mz
W
,
gdzie
,
,
C
Cx
Cy
Cz
W
W
W
W
.
Prof. Edmund Wittbrodt
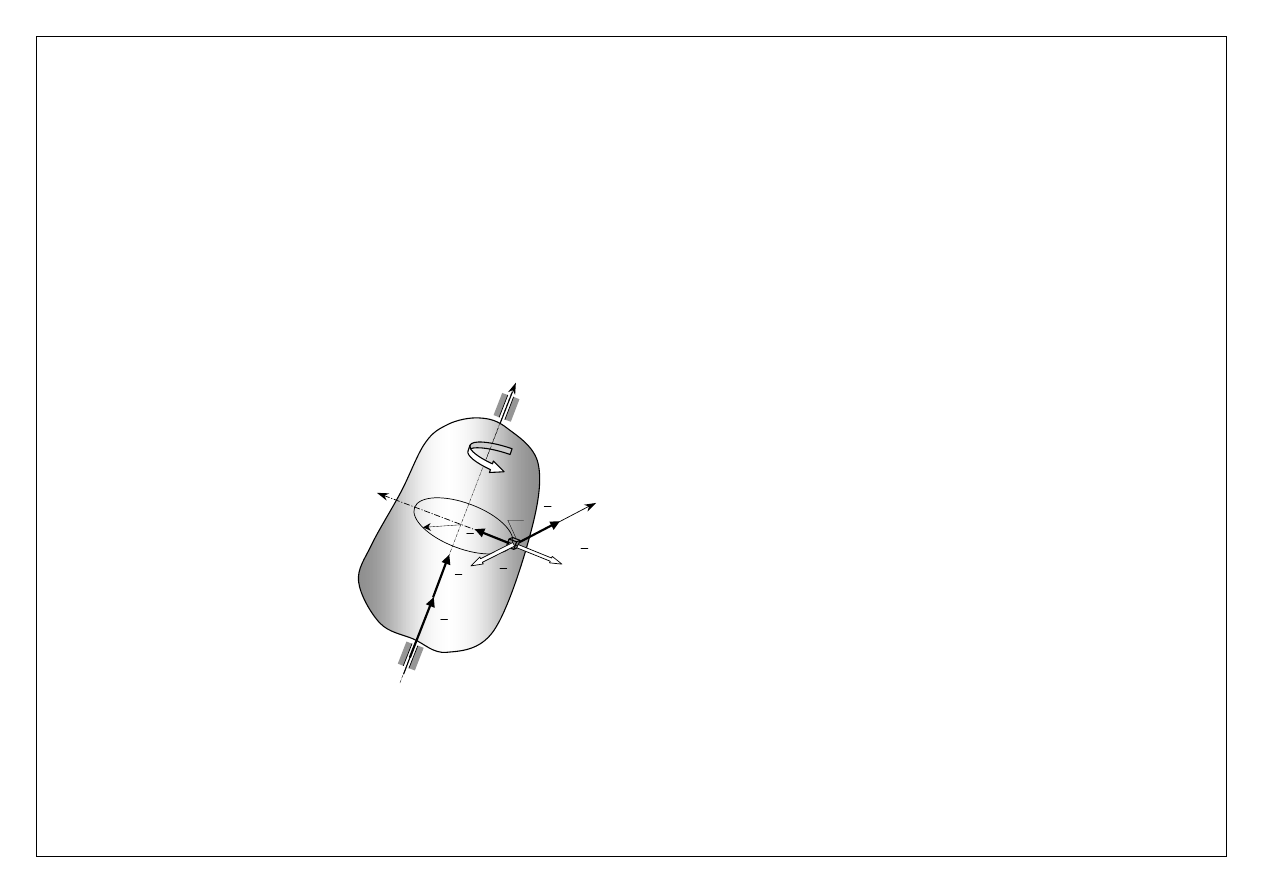
Ruch obrotowy bryły
Równania różniczkowe ruchu. Równanie różniczkowe ruchu obrotowego wokół nieruchomej osi, np. z, możemy otrzymać
korzystając z zasady d’Alemberta, która przyjmuje postać
2
1
( )
0
zi
t
z
i
m
M
dA
M
ρ
=
= −
+
=
∑
∫
.
Dynamika ruchu obrotowego bryły
ω
ε
ρ
z
n
t
n
dA
t
dA
t
a
n
a
dm
z
M
Prof. Edmund Wittbrodt
Ponieważ
t
t
dA
a dm
=
,
natomiast zgodnie z (3.33) mamy
t
a
ρε
=
,
otrzymujemy
2
( )
z
m
dm
M
ρ ε
=
∫
.
Przyspieszenie kątowe
ε ϕ
=
&&
jest stałe, niezależnie od położenia rozważanego punktu, natomiast wyrażenie
2
( )
m
dm
ρ
∫
jest
masowym momentem bezwładności J
z
bryły względem osi obrotu. Zatem ostateczna postać równania (4.76) jest następująca
z
z
J
M
ϕ
=
&&
.
Równanie to nosi nazwę
równania różniczkowego ruchu obrotowego
.
W praktyce, w dynamice ruchu obrotowego często wygodniej jest korzystać z zasad dynamiki, podobnie jak to miało
miejsce w dynamice punktu materialnego.
Prof. Edmund Wittbrodt
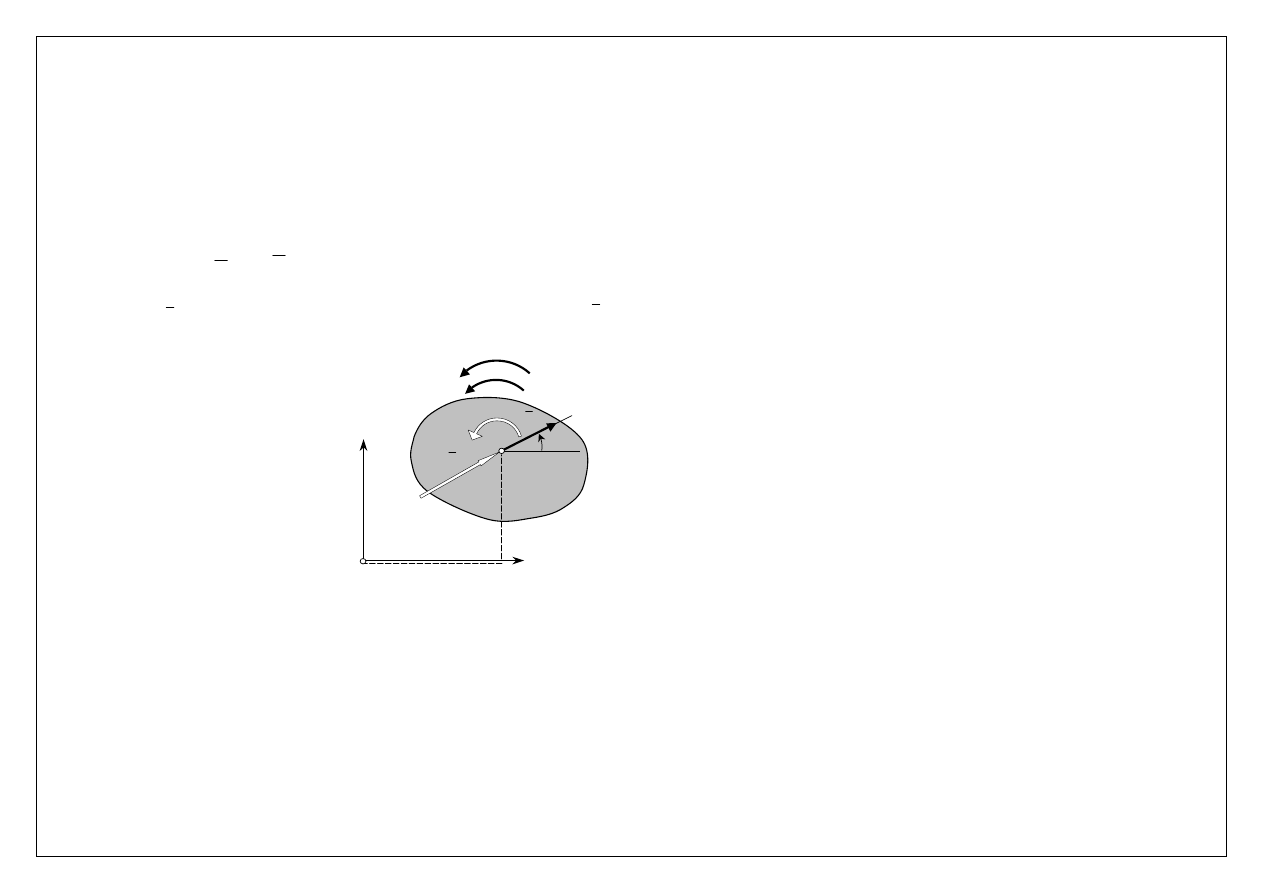
Ruch płaski bryły
Równania różniczkowe ruchu. Dla otrzymania równań dynamiki ruchu płaskiego wykorzystamy twierdzenie o ruchu środka
masy oraz twierdzenie dotyczące krętu względem środka masy. Na podstawie pierwszego otrzymujemy
C
C
ma
W
=
,
gdzie:
C
a
– przyspieszenie środka masy, m – masa ciała,
C
W
– wektor siły wypadkowej zredukowanej do środka masy.
Dynamika ruchu płaskiego bryły
Z kolei na podstawie drugiego twierdzenia mamy
1
n
z
C
iC
C
K
J
M
M
ω
=
=
=
∑
&
&
,
gdzie: J
C
– masowy, osiowy moment bezwładności względem osi przechodzącej przez środek masy i prostopadłej do
płaszczyzny ruchu, M
C
– moment wypadkowy względem tej samej osi przechodzącej przez środek masy.
O
C
y
x
C
W
x
C
y
C
α
M
C
ω
ε
C
a

Prof. Edmund Wittbrodt
Powyższe równania możemy zapisać w postaci trzech równań skalarnych:
C
x
mx
W
=
&&
,
C
y
my
W
=
&&
,
C
C
J
M
ϕ
=
&&
.
Powyższe równania noszą nazwę
równań różniczkowych ruchu płaskiego
.
Wyszukiwarka
Podobne podstrony:
05 Dynamika ruchu postepowego i po okregu Ruch obrotowy bryly sztywnej
15 Ruch obrotowy bryły sztywnej
4R ruch obrotowy bryly PR rozwiazania id 39410 (2)
ruch obrotowy bryły sztywnej
3. Ruch obrotowy bryły sztywnej, Zadania maturalne działami, fizyka, poz rozszerzony
Ruch obrotowy bryly = 2, Piotr Mazur______ Rzesz?w 27.02.1996
13-ruch obrotowy bryly sztywnej
Ruch obrotowy bryły sztywnej, Zadania maturalne działami
04 Ruch obrotowy bryly sztywnej
Ruch obrotowy bryly = , Piotr Mazur______ Rzesz?w 27.02.1996
4 ruch obrotowy bryly PR zadania id 37944 (2)
3 Ruch obrotowy bryly sztywnej
07 Ruch obrotowy bryły sztywnej
więcej podobnych podstron