PikoCNC REMOTEv1
Copyright © 2015 PPHU ELCOSIMO
1
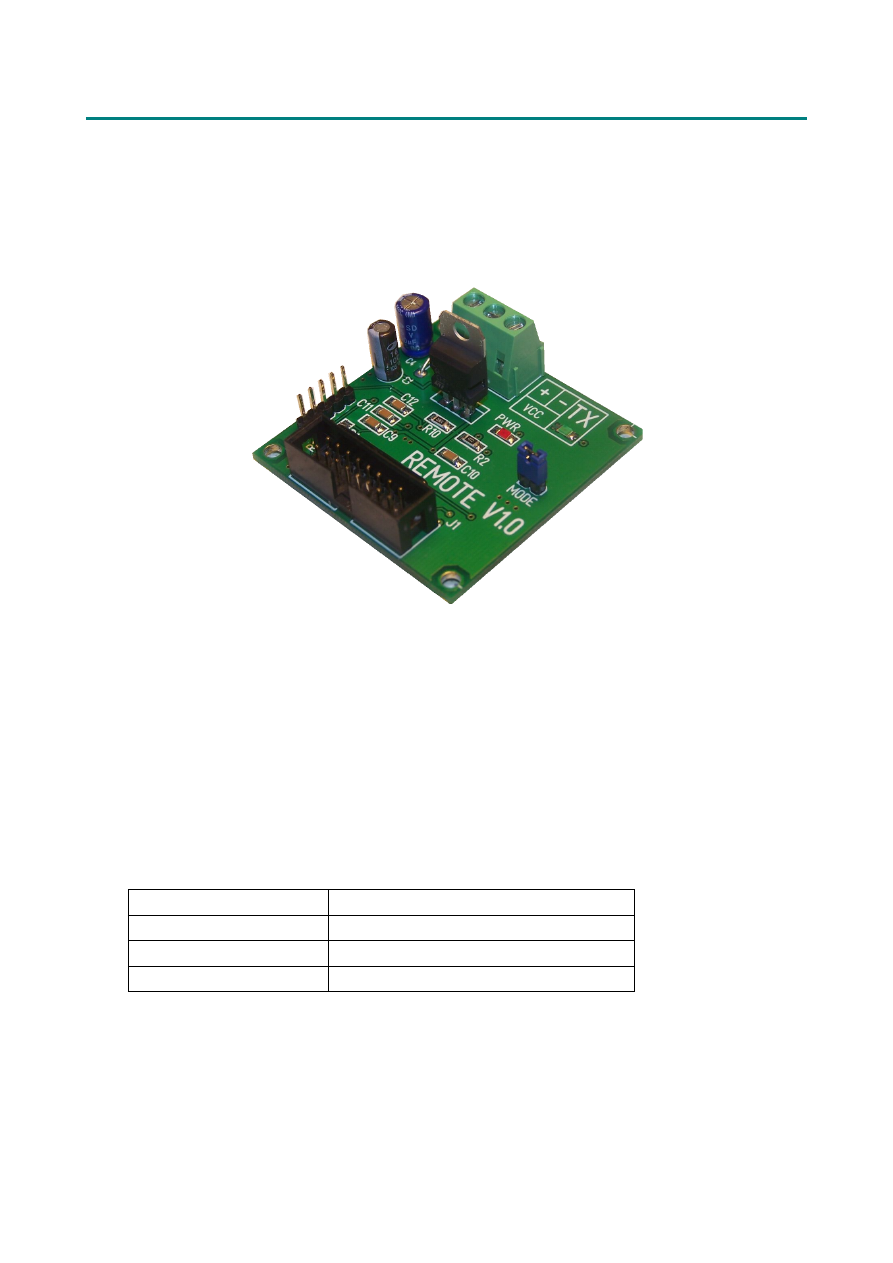
PikoCNC moduł REMOTE v1
wersja 1.1
Podstawowe parametry
Liczba wejść
14
Ilość bitów wysyłanych
10
Zasilanie
8-24 V DC
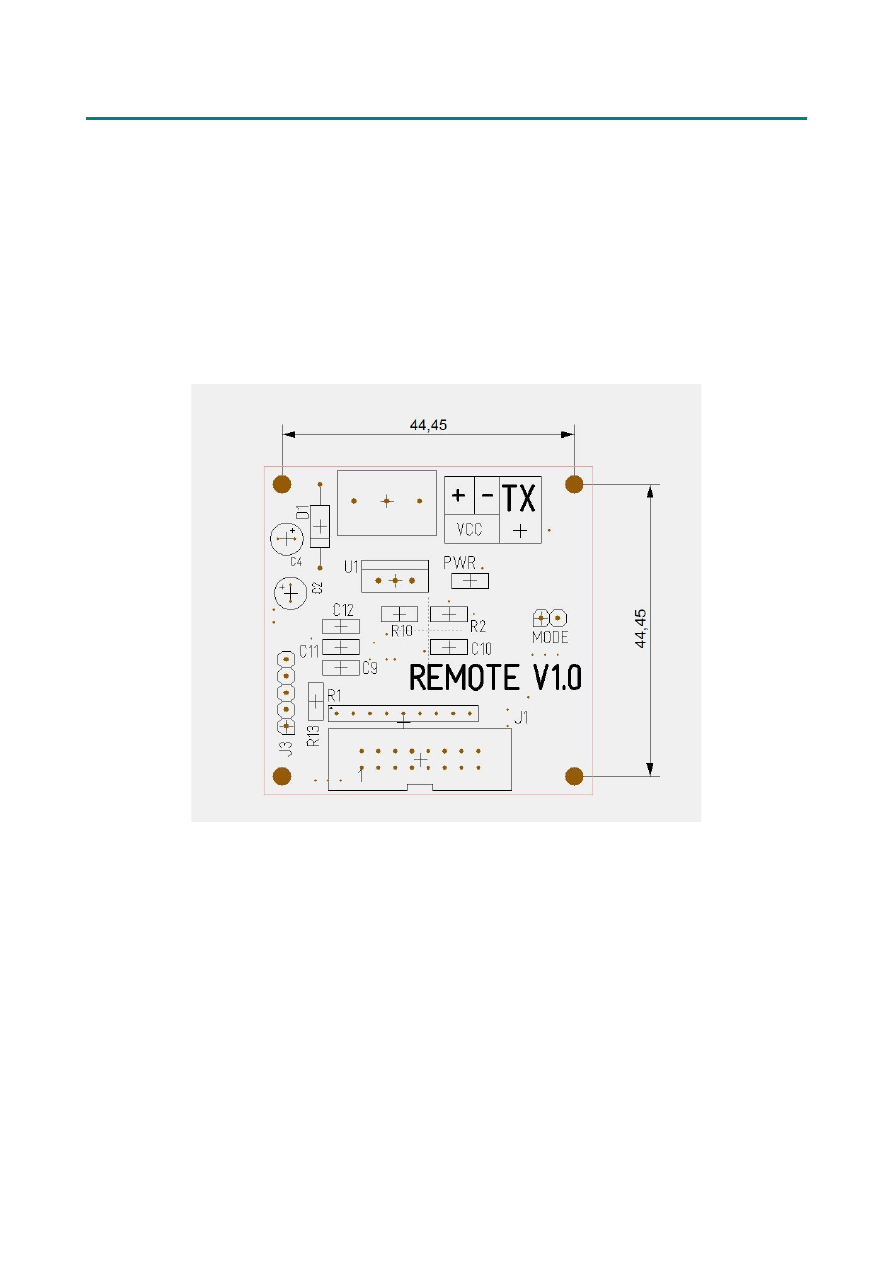
Wymiary (mm)
50x50

PikoCNC REMOTEv1
Copyright © 2015 PPHU ELCOSIMO
2
Opis
Prosty moduł zdalnych wejść powstał z myślą o zbudowaniu jog-a, lub innych
dodatkowych wejść przeznaczonych na przyciski sterujące pracą maszyny. Moduł posiada
14 wejść oraz dwa tryby ich wykorzystania. Generalnie moduł wysyła do kontrolera 10
bitów danych, które są widoczne w rejestrze IN jako bity 22-31. O ostatecznym
przeznaczeniu danego wejścia decyduje program PLC w kontrolerze.
Tryby pracy
Tryb 1 - zworka MODE (ON)
W tym trybie moduł wysyła do kontrolera stan 10-ciu wejść I0-I9.
Tryb 2 – zworka MODE (OFF)
W tym trybie moduł wysyła do kontrolera stan siedmiu wejść I0-I6. Natomiast pozostałe
trzy bity zawierają kod funkcji dla impulsatora. Kod zadawany jest przez wejścia I7-I13
(patrz tabela). Kod wybiera się przez załączenie jednego z wejść I7-I13. Załączenie dwóch
wejść jednocześnie traktowane jest jako błąd i kod przyjmuje wtedy wartość „0” - czyli
brak funkcji.
PikoCNC REMOTEv1
Copyright © 2015 PPHU ELCOSIMO
3
Podłączenie
Moduł może pracować w dużych odległościach od kontrolera (wiele metrów). Oczywiście
długie może być połączenie Tx->kontroler, linie łączące przyciski z modułem nie powinny
przekraczać 0,5m.
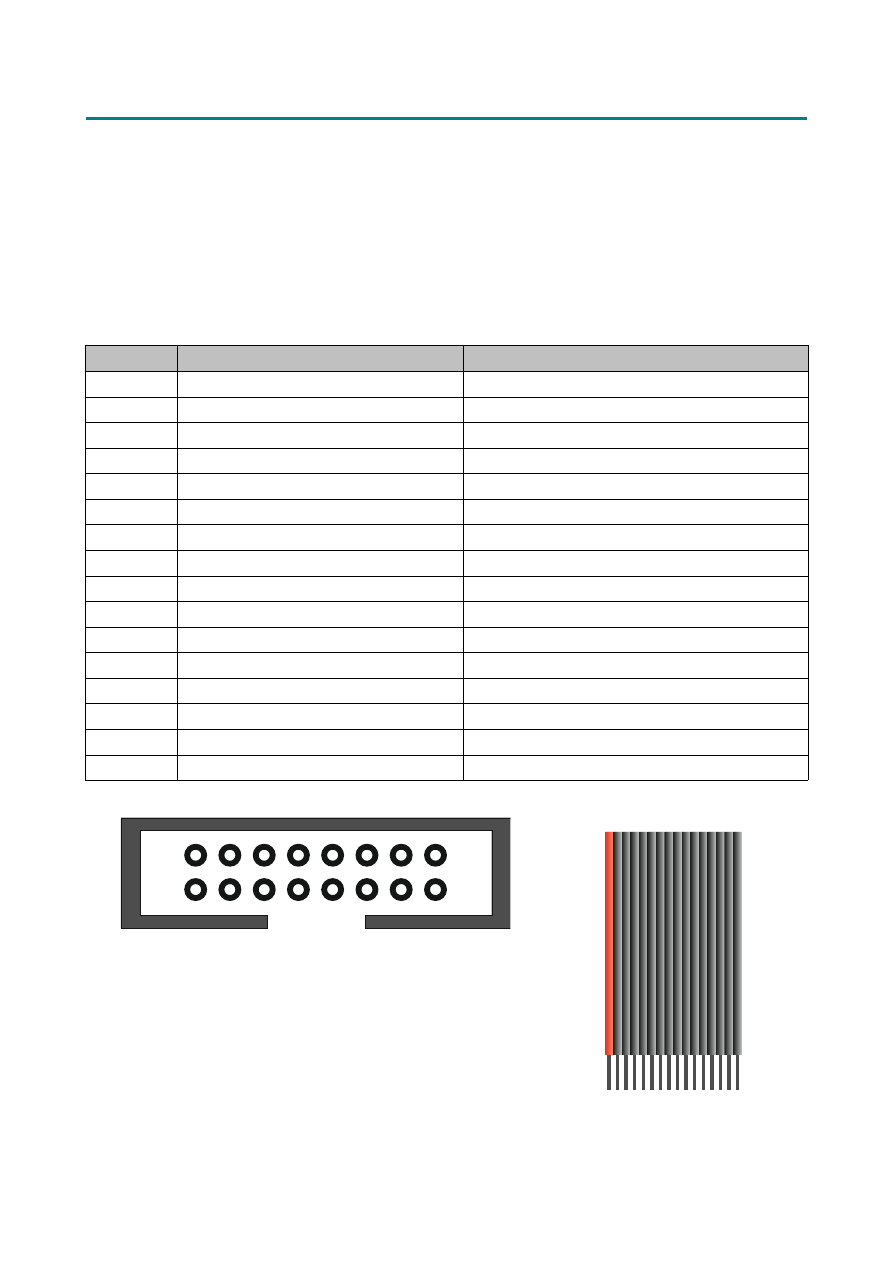
Rozkład wyprowadzeń na złączu J1:
Numer
Tryb MODE ON
Tryb MODE OFF
1
IN0
IN0
2
IN1
IN1
3
IN2
IN2
4
IN3
IN3
5
IN4
IN4
6
IN5
IN5
7
IN6
IN6
8
IN7
SELECT F (kod 001)
9
IN8
SELECT S (kod 010)
10
IN9
SELECT X (kod 011)
11
NC
SELECT Y (kod 100)
12
NC
SELECT Z (kod 101)
13
NC
SELECT A (kod 110)
14
NC
SELECT B (kod 111)
15
GND
GND
16
GND
GND
1
2
15
16
1
16
PikoCNC REMOTEv1
Copyright © 2015 PPHU ELCOSIMO
4
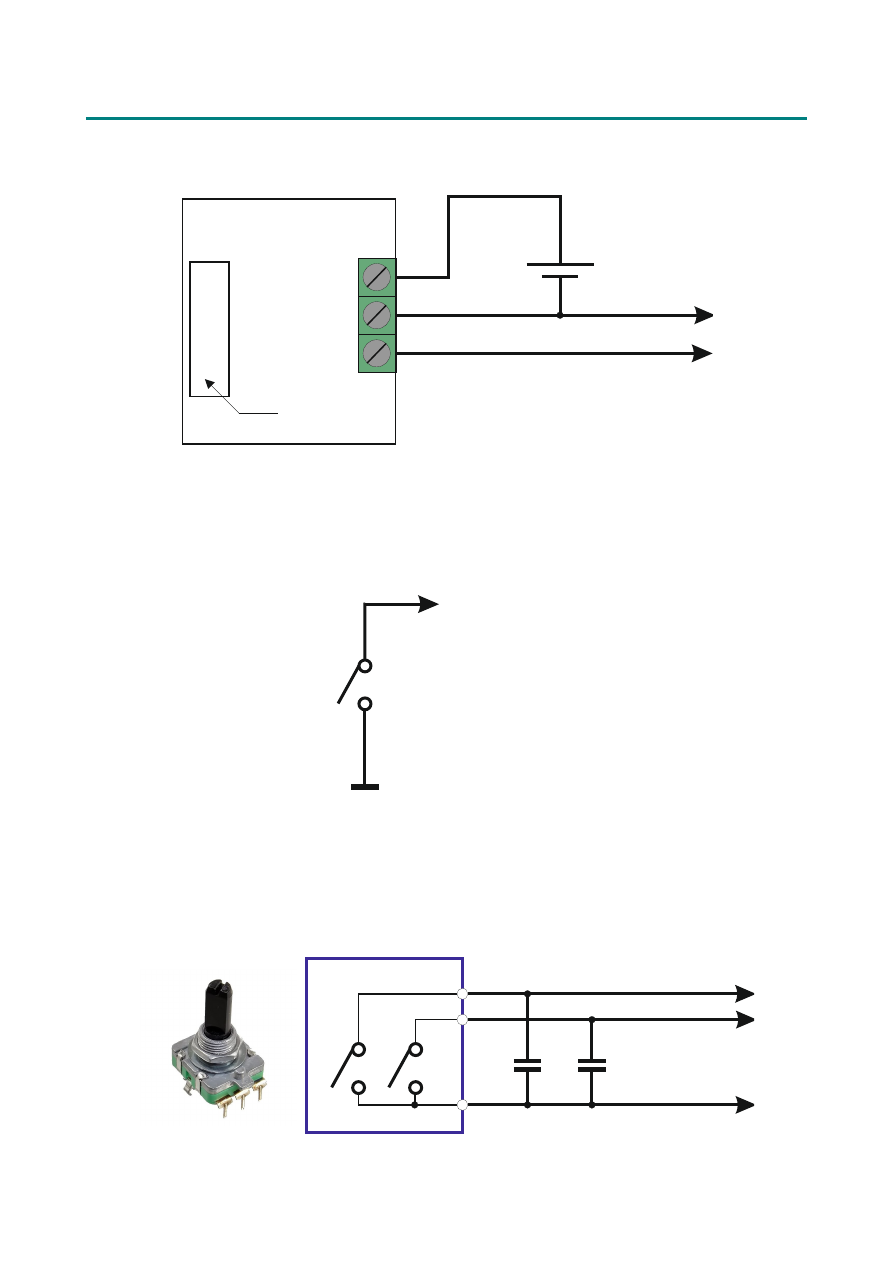
Schemat połączeń na listwie zaciskowej.
Schemat połączeń przycisków do modułu.
Schemat podłączenia impulsatora mechanicznego do kontrolera (24
imp/obr).
+
PIKO_IN
PIKO_IN_COM
Tx
VCC
GND
J1
I0 ... I9
PIKO_IN_COM
PIKO_IN
PIKO_IN
A B
2 x 100nF
PikoCNC REMOTEv1
Copyright © 2015 PPHU ELCOSIMO
5
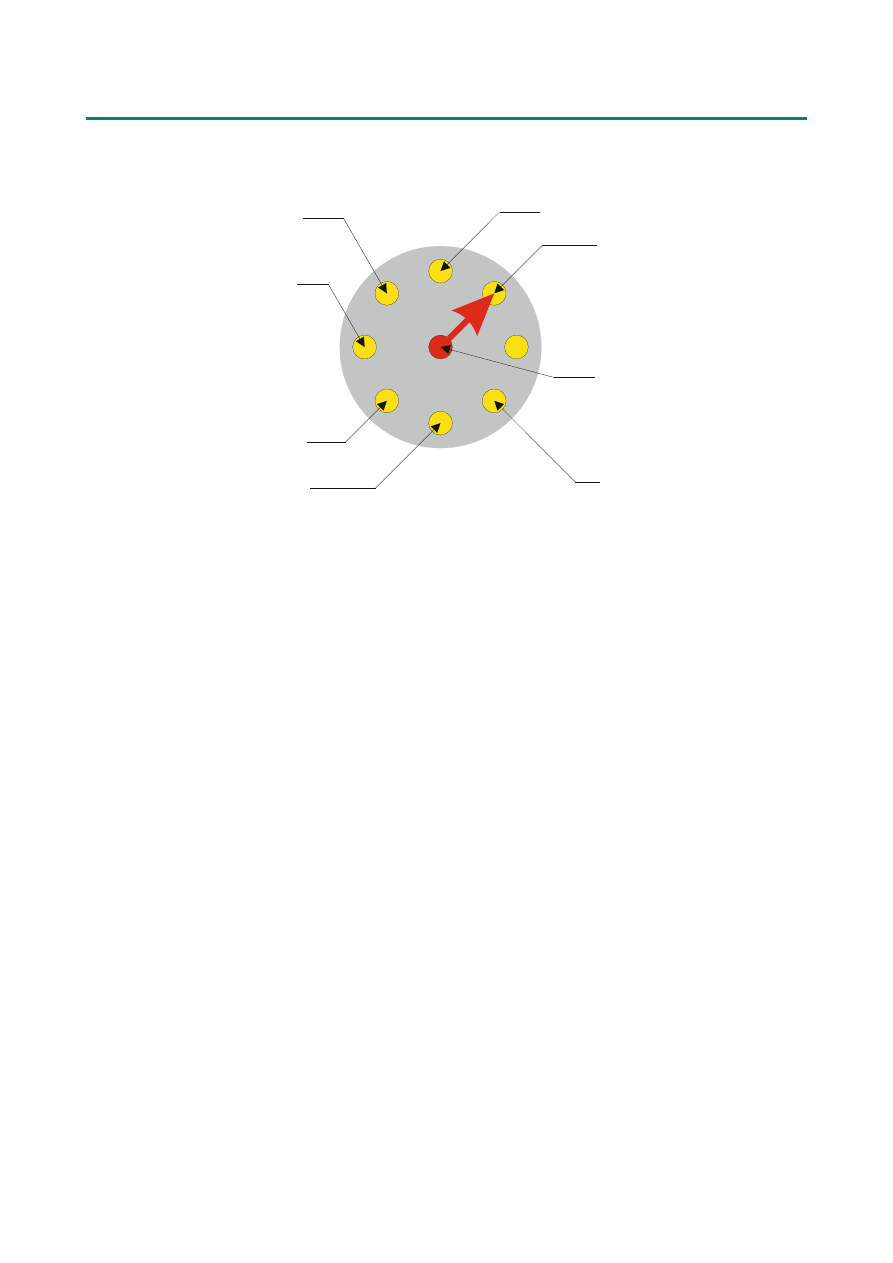
Schemat podłączenia przełącznika obrotowego do modułu.
I7(F)
I8(S)
I9(X)
I10(Y)
I11(Z)
GND
I12(A)
I13(B)

PikoCNC REMOTEv1
Copyright © 2015 PPHU ELCOSIMO
6
Obsługa na poziomie PLC.
Jak wcześniej powiedziano dane odebrane przez PLC widoczne są w rejestrze IN jako
bity 22-31. Dalej pod te wejścia podpinamy odpowiednie funkcje.
Przykład podpięcia modułu w trybie MODE (ON):
//==================================================================
// Przykład wykorzystania modułu jako JOG-a – same przyciski.
// Manipulator ma następujące przyciski:
// JOG_XL – jazda jog X w lewo
// JOG_XR – jazda jog X w prawo
// JOG_YL – jazda jog Y w lewo
// JOG_YR – jazda jog Y w prawo
// JOG_ZL – jazda jog Z w lewo
// JOG_ZR – jazda jog Z w prawo
// JOG_FAST – Tryb szybki dla jog
// START
// STOP
// PAUZA
//==================================================================
#
IF_OPTION
12 = 1
#
NAME_I
5 = REMOTE
// Moduł podpięty pod wejście 5
#
NAME_I
22 = RMJOG_XL
#
NAME_I
23 = RMJOG_XR
#
NAME_I
24 = RMJOG_YL
#
NAME_I
25 = RMJOG_YR
#
NAME_I
26 = RMJOG_ZL
#
NAME_I
27 = RMJOG_ZR
#
NAME_I
28 = RMJOG_START
#
NAME_I
29 = RMJOG_STOP
#
NAME_I
30 = RMJOG_PAUZA
#
NAME_I
31 = RMJOG_FAST
<<
IN
REMOTE
>> REMOTE_IN
<<
IN
RMJOG_XL
>>
JOG_L0

PikoCNC REMOTEv1
Copyright © 2015 PPHU ELCOSIMO
7
<<
IN
RMJOG_XR
>>
JOG_R0
<<
IN
RMJOG_YL
>>
JOG_L1
<<
IN
RMJOG_YR
>>
JOG_R1
<<
IN
RMJOG_ZL
>>
JOG_L2
<<
IN
RMJOG_ZR
>>
JOG_R2
<
<
IN
RMJOG_FAST
>>
JOG_FAST
<<
START
OR
IN
RMJOG_START
>>
START
<<
STOP
OR
IN
RMJOG_STOP
>>
STOP
<<
PAUSE
OR
IN
RMJOG_PAUZA
>>
PAUSE
#
END_OPTION
// Koniec
Przykład podpięcia modułu w trybie MODE (OFF):
//==================================================================
// Przykład wykorzystania modułu zdalnych wejść jako JOG-a z przełącznikiem trybu oraz
// impulsatorem.
// Manipulator ma następujące przyciski:
// JOG_L – jazda jog w lewo (wybór osi przełącznikiem)
// JOG_R – jazda jog w prawo
// JOG_FAST – Tryb szybki dla jog i impulsatora
// START
// STOP
// PAUZA
// ZERO – zerowanie (wybór osi przełącznikiem). Aktywny gdy przyciśnięty razem z
// JOG_FAST
// Impulsator (wybór trybu pracy przełącznikiem)
//==================================================================
#
IF_OPTION
12 = 2
#
NAME_I
3 = IMP_DIR
// Wejście DIR impulsatora

PikoCNC REMOTEv1
Copyright © 2015 PPHU ELCOSIMO
8
#
NAME_I
4 = IMP_PUL
// Wejście PULSE impulsatora
#
NAME_I
5 = REMOTE
// Moduł podpięty pod wejście 5
#
NAME_I
22 = RMJOG_L
#
NAME_I
23 = RMJOG_R
#
NAME_I
24 = RM_FAST
#
NAME_I
25 = RM_START
#
NAME_I
26 = RM_STOP
#
NAME_I
27 = RM_PAUZA
#
NAME_I
28 = RM_ZERO
#
NAME_I
29 = WHM_0
#
NAME_I
30 = WHM_1
#
NAME_I
31 = WHM_2
<<
IN
REMOTE
>>
REMOTE_IN
<<
IN
RMJOG_L
// Jog w lewo. Wybór osi za pomocą przełącznika.
>>
WH_JOG_L
<<
IN
RMJOG_R
// Jog w prawo
>>
WH_JOG_R
<<
IN
RM_FAST
>>
JOG_FAST
AND
IN
RM_ZERO
// Zerowanie: muszą być przyciśnięte ZERO+JOG_FAST
>>
WH_ZERO
<<
START
OR
IN
RM_START
>>
START
<<
STOP
OR
IN
RM_STOP
>>
STOP
<<
PAUSE
OR
IN
RM_PAUZA
>>
PAUSE
<<
IN
IMP_PUL
// Podłączenie impulsatora.
>>
WH_PULSE
<<
IN
IMP_DIR
>>
WH_DIR
<<
IN
WHM_0
// Podłączenie bitów wyboru trybu pracy impulsatora
>>
WH_MD0
<<
IN
WHM_1
PikoCNC REMOTEv1
Copyright © 2015 PPHU ELCOSIMO
9
>>
WH_MD1
<<
IN
WHM_2
>>
WH_MD2
#
END_OPTION
// Koniec
Wymiary (mm)
PikoCNC REMOTEv1
Copyright © 2015 PPHU ELCOSIMO
10
PPHU ELCOSIMO
Andrzej Woźniak
ul. Zielona 1B
62-110 Damasławek
Document Outline
- PikoCNC REMOTEv1 Copyright © 2015 PPHU ELCOSIMO10
- Podstawowe parametry
- Opis
- Tryby pracy
- Podłączenie
- Schemat połączeń na listwie zaciskowej.
- Schemat połączeń przycisków do modułu.
- Schemat podłączenia impulsatora mechanicznego do kontrolera (24 imp/obr).
- Schemat podłączenia przełącznika obrotowego do modułu.
- Obsługa na poziomie PLC.
- Przykład podpięcia modułu w trybie MODE (ON):
- Przykład podpięcia modułu w trybie MODE (OFF):
- Wymiary (mm)
Wyszukiwarka
Podobne podstrony:
comcast on demand remote manual
comcast dvr remote manual
universal remote control 8 in 1 users manual 121714
YI Selfie Stick Bluetooth Remote User Manual
Sole Control Sc230 Sc240 Sc241 Remote Programming Manual
Total Remote user manual
PANsound manual
als manual RZ5IUSXZX237ENPGWFIN Nieznany
hplj 5p 6p service manual vhnlwmi5rxab6ao6bivsrdhllvztpnnomgxi2ma vhnlwmi5rxab6ao6bivsrdhllvztpnnomg
BSAVA Manual of Rabbit Surgery Dentistry and Imaging
Okidata Okipage 14e Parts Manual
Bmw 01 94 Business Mid Radio Owners Manual
Manual Acer TravelMate 2430 US EN
manual mechanika 2 2 id 279133 Nieznany
4 Steyr Operation and Maintenance Manual 8th edition Feb 08
Oberheim Prommer Service Manual
cas test platform user manual
więcej podobnych podstron