New MOEMS-Switch Device with Electrostatic Actuator
E. Thielicke, E. Obermeier
Technical University of Berlin, Microsensor and Microactuator Technology Center (MAT),
TIB 3.1, Gustav-Meyer-Allee 25, 13355 Berlin, Germany; www-mat.ee.tu-berlin.de
Abstract
This paper presents a new concept for a 1-by-N-
switch, which can be used in tree-structured
optical networks.
Although the switch works with any large
displacement actuator, a new curved electrode
electrostatic actuator for linear motion of up to
180 µm has been designed. No tilting mechanism
is needed, and the mirror surface is smooth and
easily coated with highly reflecting materials.
A 1-by-4-switch has been fabricated using
classical low cost micromechanical technologies
like surface and bulk micromachining.
Introduction
The signal paths of optical MEMS-switches can be
actuated in three ways [1]:
1) by tilting mirrors or mirror arrays, whereby the
tilting angles are controlled precisely to minimize
signal loss
2) by microlens-devices, whose fabrication is
technologically demanding
3) and by on/off- or crossbar-switches, which use
shutters or mirrors that are mounted perpendicular
to the wafer surface and block or give way to the
beam. However, they are difficult to assemble
and/or may have rough mirror surfaces resulting
from their fabrication process.
Design
The switch consists of two passive and one active
silicon chip bonded to a glass spacer. The fibers
are placed under a fixed angle (e.g. 45° in the
corners of a KOH etched groove in <100>-Si) over
a row of aperture-holes, which are equally spaced.
The signal-path is chosen by a combined opening
and closing of the holes and beam reflection in
two levels.
passive silicon components
bonded glass spacer
micromachined chip
fiber in
shutter-mirror
fiber out 1
out 2
out 3
out 4
Fig 1: Schematical drawing of the switch (cross section).
The switched signal-path is marked by a dashed line.
Fig. 1 shows one possible signal path and the
corresponding binary states of the three shutter-
mirrors.
The shutter-mirrors can be moved by any kind of
long stroke linear or rotational actuator [2, 3, 4],
but a new fast switching curved electrode linear-
actuator was designed, which uses the moving-
wedge principle of actuation [5, 6].
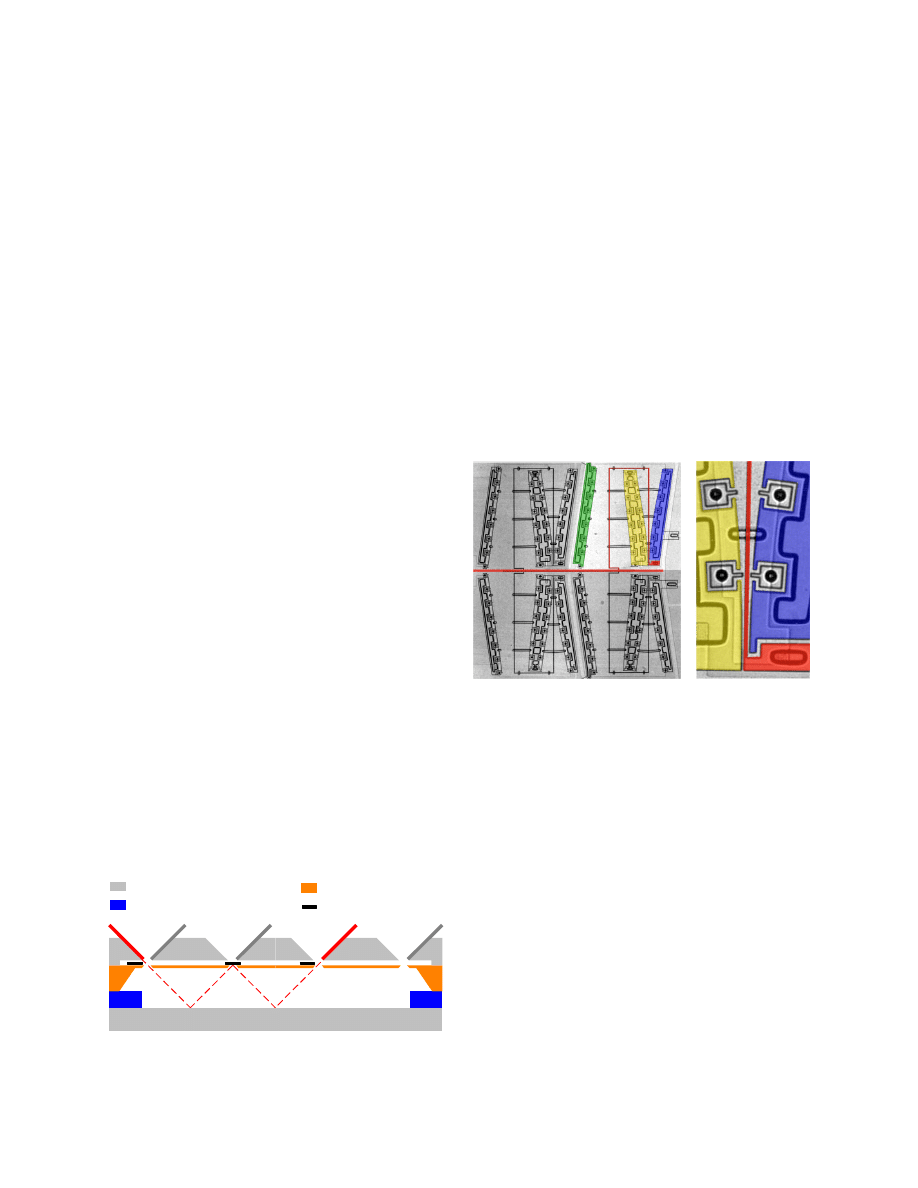
The middle rod, to which the shutter-mirror is
mounted, is suspended by four 2 - 3 µm wide U-
shaped tethers. Each of the four tethers together
with their stator electrodes are built up similarily,
forming a unit, which is marked in the photograph
of the actuator, shown in Fig. 2.
Fig 2: Electrostatic actuator with four similar units. Each
unit consists of a clamped U-shaped tether electrode,
which is attached to the middle rod (red), and its right
(blue), middle (yellow) and left (green) curved stator
electrode. The total size amounts to 1x1 mm².
The clamping and four stoppers, which prevent short
circuits, are shown in the close-up on the right.
The tethers form the moving electrodes, which are
attracted electrostatically by the curved stator
electrodes. The electrostatic force is
approximately proportional to the square of the
reciprocal distance of the electrodes, so that
attraction only occurs in the part of the electrodes,
where they come close to each other.
If voltages between 100 and 200 V are applied
(depending on design) the moving electrode
beams are pulled towards the stator electrodes
like a closing zipper and push the middle rod
towards the left or right in linear motion parallel to
the wafer surface.
To perform a total displacement of up to 180 µm,
the electrostatic force at each point of bending has
to be always just big enough to maintain further
moving. This can be achieved by rising the voltage
or choosing a suitable design for the stator
electrodes; i.e., the curvatures of the stator
electrodes define the deflection-voltage behaviour
of the actuator.
Additionally, the curvature of the stator electrodes
depends on the number and size of the stoppers
that prevent short circuits. It must be calculated
using a coupled electro-mechanical FEM-
simulation, which can be seen in Fig. 3 and 4.
Fig 3: FEM-simulation of the electric potential from
which the electrostatic forces are calculated (cross
section of the tether and ground electrode [0 V] on the
left side and the stator electrode [100 V] on the right).
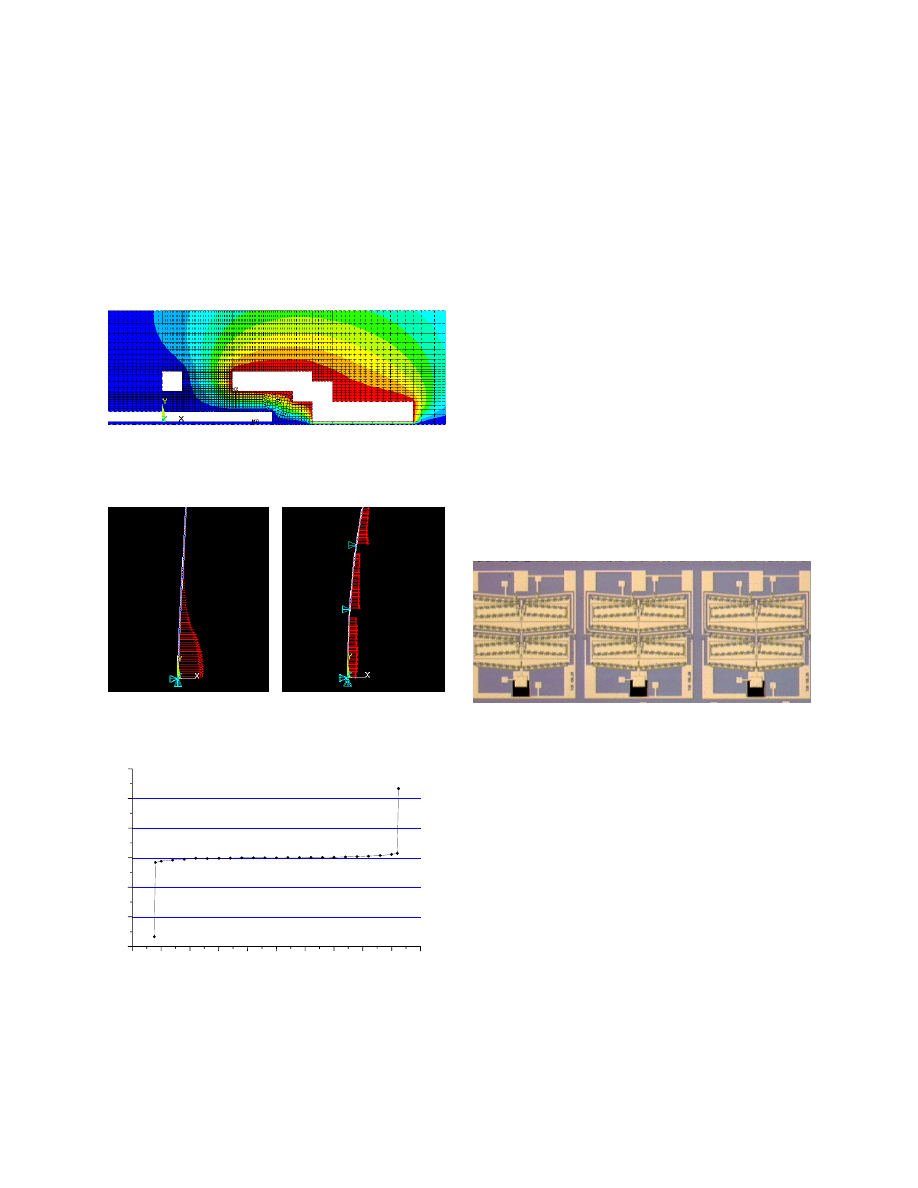
Fig 4: Part of the FEM-simulation of the tether deflection
a) in the starting phase; b) when in contact with the
stoppers (force arrows in arbitrary units).
125
100 75 50 25 0 25 50 75 100 125
-75
-50
-25
0
25
50
75
Fig 5: This diagram shows the deflection-voltage of the
middle rod for the binary 130 µm type actuator.
Depending on the electrode design, the actuator
allows a variety of deflection-voltage curves, but in
this application, an electrode setup for binary
deflection behaviour with two states (open &
close) was used, as shown in Fig. 5.
Fabrication
The actuator has been realized using standard
surface micromachining technology with two
polysilicon layers (one ground and one active
layer) and one LTO sacrificial layer. The aperture
hole is then opened from the backside using wet
chemical etching with KOH.
The chips are anodically bonded to a patterned
glass-Si wafer-stack, which defines the distance of
1190 µm between the two reflecting levels.
The surface quality of the shutter-mirror and the
lower Si-chip is very good due to the polished
surfaces of which they are made, resp. on which
they are deposited. Additionally, they may be
coated with gold for better reflection.
Results
A 1-by-4-switch has been realized. The
micromachined chip with the aperture holes and
shutter-mirrors is shown in Fig. 6.
The functionality has been demonstrated by
switching a laser beam into each of the four
outgoing paths.
Fig 6: Top view of a fabricated switch. The aperture
holes can bee seen in the lower part of the photograph.
(The 4th hole is not shown). Total size is 4x1.2 mm².
References
[1] S. J. Walker, D. J. Nagel: ”Optics & MEMS: An
Overview of Current Technology”, MOEMS ’97, Nara,
Japan, 1997
[2] E. Thielicke, E. Obermeier: “Microactuators and their
Technologies”, J. Mechatronics 10, 2000, 431-455
[3] Th. Kraus, M. Baltzer, E. Obermeier: „A Micro
Shutter for Applications in Optical and Thermal
Detectors“, Transducers ‘97, Chicago, USA, 1997
[4] G. Perregaux, P.Weiss, B. Kloeck, H. Vuilliomenet,
J.-P. Thiébaud: “High-Speed Micro-Electromechanical
Light Modulation Arrays”, Transducers ’97
[5] J. Schimkat, L. Kiesewetter, H.-J. Gevatter, F. Arndt,
A. Steckenborn, H. Schlaak: „Moving Wedge Actuator:
An Electrostatic Actuator for Use in a Microrelay”,
MST ’94, Potsdam, Germany, 1994
[6] R. Legtenberg, F. Berenschot, M. Elwenspoek, J.
Fluitman: „Electrostatic Curved Electrode Actuators”,
IEEE MEMS, Amsterdam, The Netherlands, 1995
U [Volt]
right, then middle
stator electrodes
middle, then left
stator electrodes
deflection [µm]
Wyszukiwarka
Podobne podstrony:
16 Electrostatic actuators with P silicon diaphragms
16 Electrostatic actuators with P silicon diaphragms
NEVER mess with electricity
10 Large Displacement Electrostatically Actuated Microrelay
How to build a USB device with PIC 18F4550 or 18F2550 (and the microchip CDC firmware)
PP MEMS 03 Electrostatic Actuation
13 IMPROVING ELECTROSTATIC ACTUATORS for micro mirrors
Bearden EXPLANATION OF THE MOTIONLESS ELECTROMAGNETIC GENERATOR WITH 0(3) ELECTRODYNAMICS
10 Large Displacement Electrostatically Actuated Microrelay
How to build a USB device with PIC 18F4550 or 18F2550 (Website)
Rachmaninov Press op34 14 Vocalise vln pno (with vln part)
Example CV 14 Clean shaded titles with emphasis on skills CV
Electrostatic micro actuator for HD
Medical devices 14
Making Electricity With a Hydrogen Fuel Cell
A Novel Switch Mode Dc To Ac Inverter With Nonlinear Robust Control
Electronics 3 Switches,Relays, Transducers S
New planetary based hybrid automatic transmission with true on demand actuation
więcej podobnych podstron