© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
VHDL-AMS Modeling of an Electric
Power Steering System in a Multi-
Physics Simulation Environment.
SEKISUE, Takayuki
Ansoft Japan K.K.
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
Presentation Goals
• Mechanical modeling in SIMPLORER
– About the mechanical system model’s description and the
usage.
– About the description of the motor drive part
• VHDL-AMS model
• System simulation with power unit
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
Introduction
•
In the design of the electric equipment component, the
optimization of the equipment unit has been advanced.
•
On the other hand, modeling a complex phenomenon
and detailed operation is requested by making to high
performance in the design of the system that controls
them.
•
Cannot a new solution point be found by sharing the
simulation model as both cooperating?
– This presentation introduces the example of
simulating the subsystem as an example of EPS
control model and driving system.
– The example of simulating a necessary element
technology is referred to make it to high accuracy.
– And this introduces everything from each
simulation result to the power management as an
example of designing the total system.
Accept total
system
Subsystem
verification
Built-in
verification
Demand
definition
Optimize of
elements
Subsystem
design
Topology
layout
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
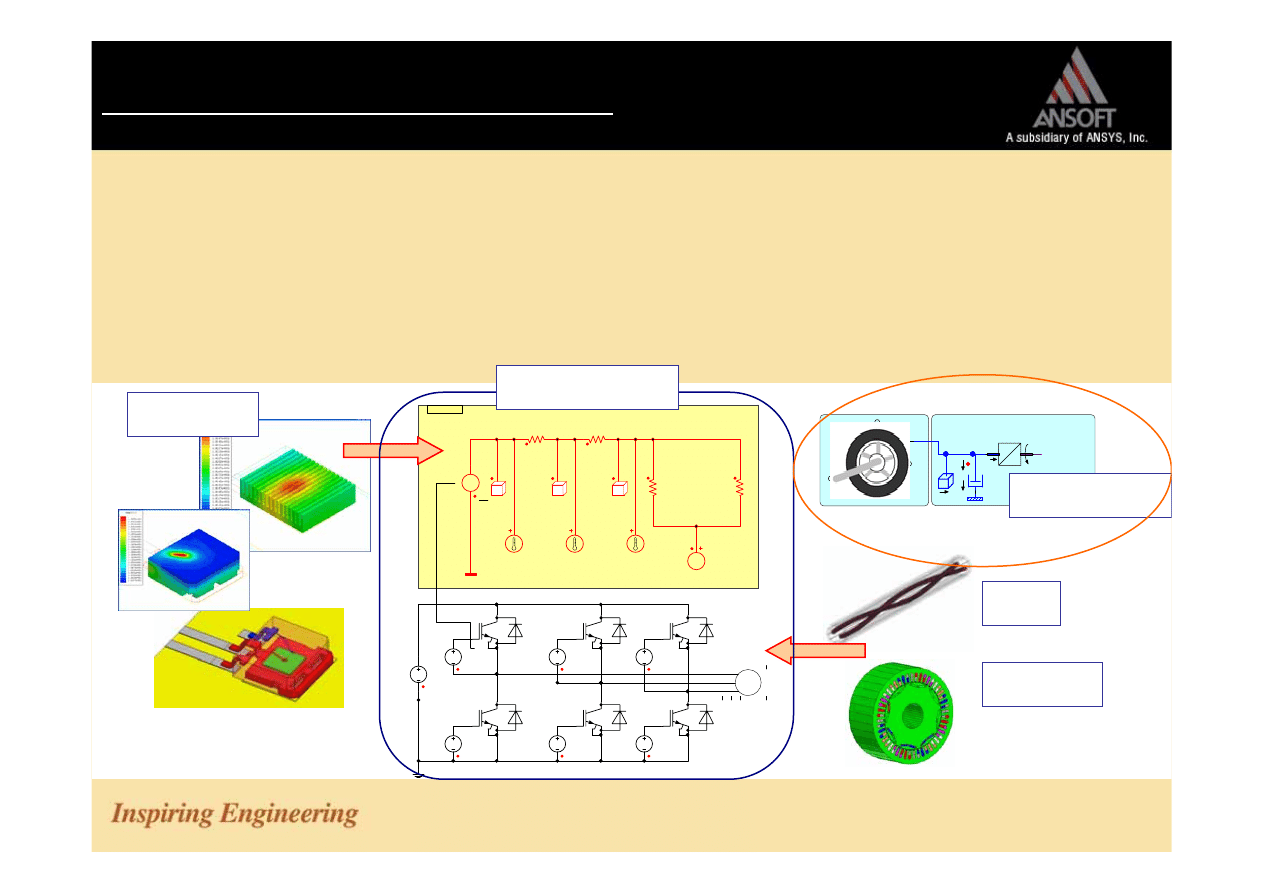
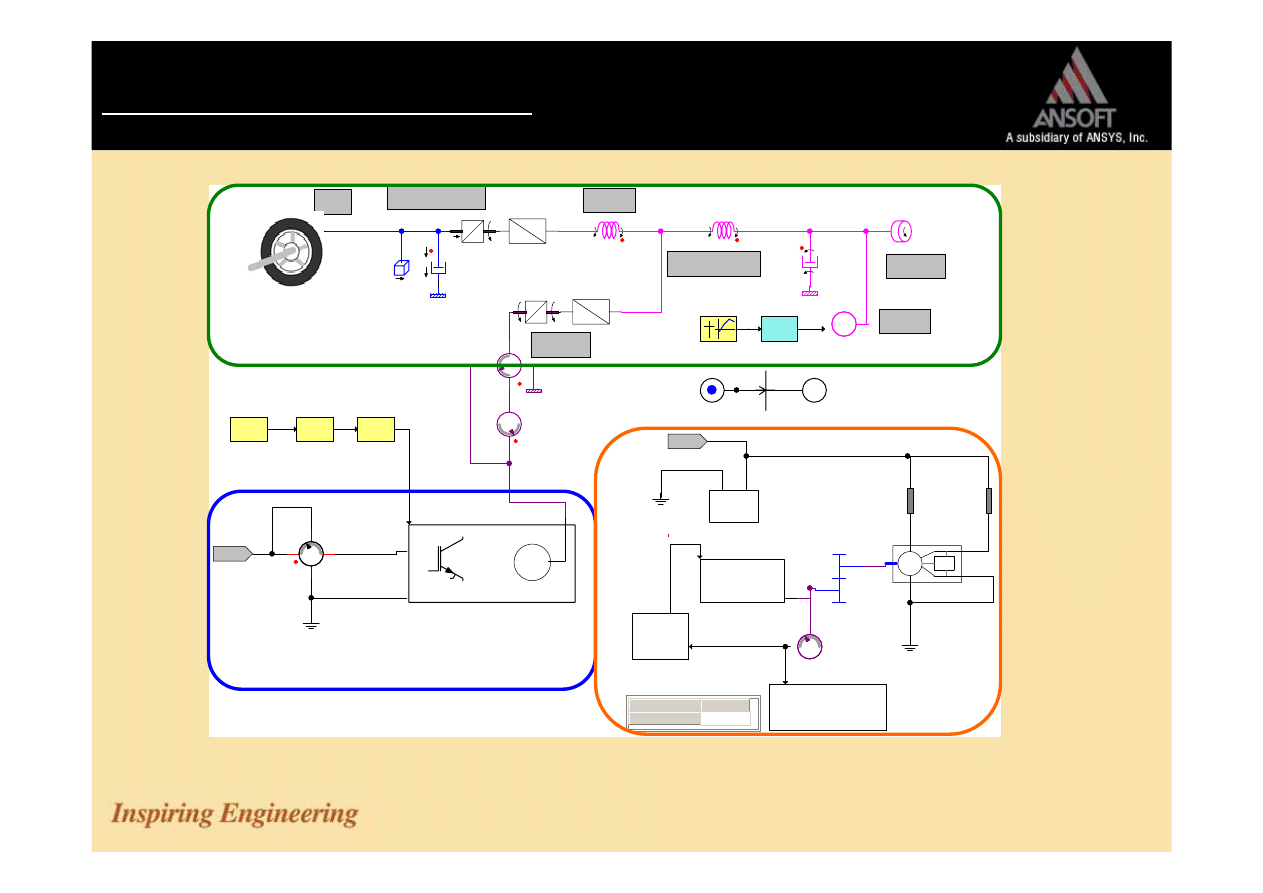
• SIMPLORER can be applied not only for electrical circuits
but also Multi-domain system & circuit.
SIMPLORER OverView
OMEGA
M
3 ~
B
A
C
I1C
I1B
I1A
N
H
Θ
EQU
RTH_Chip
K := 1.5
CTH_J
C_TH := 1m
H1
CTH_Chip
C_TH := 10m
RTH_Case
K := 0.2
CTH_Case
C_TH := 0.1
RTH_Sink_Conv
K := 1.02
THM1
THM2
THM3
RTH_Sink_Rad
K := 4.2
Tambient
VALUE := 300
Celsius
PEL
TR1
ROT2
TSF
tra
Wheel_dynamics
Thermal model design
Design of magnetic
components
Mechanical model design
Common mode- noise
SIMPLORER
ePhysics
Maxwell
Q3D
VHDL-AMS
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
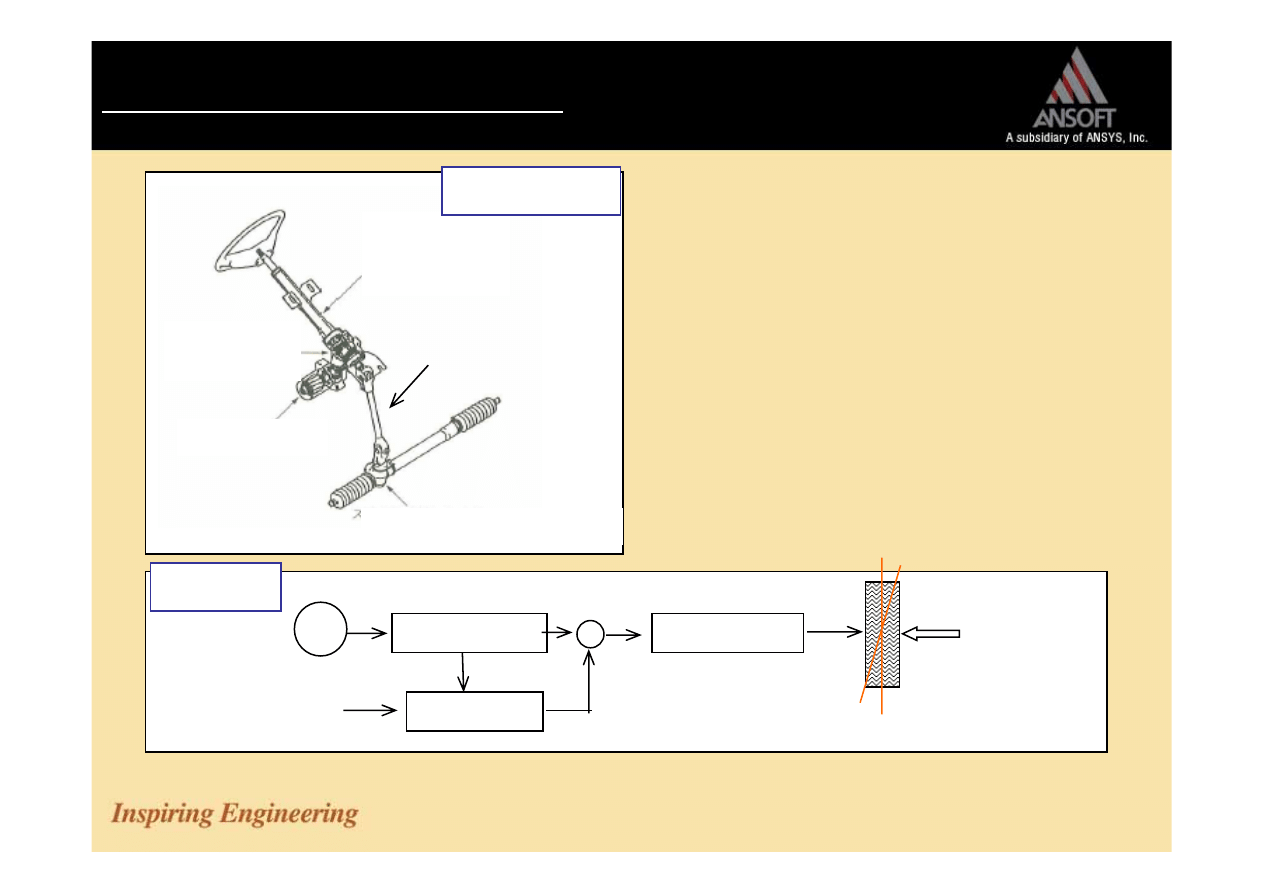
Steering assist system.
1. Steering
2. Torsion bar
&
Column shaft
3. Intermediate shaft
6.Assist motor
4.Rack & Pinion gear
Deceleration
gear
自動車工学入門 :野崎博路 著:山海堂 ISBN 4-381-08855-7
Steering
Torque sensor
+
+
Assist motor
Vehicle speed
Rack & Pinion
Slip angle
Side force
•
Change of the assistant gain by vehicle speed
• The moment of self aligning
=> These have not been considered yet
Diagram
Composition
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
TR1
ROT2
TSF
ROT1 ROT2
TSF
ROT
ROT_V
ROT
ROT_V
T
Φ
+
TBar
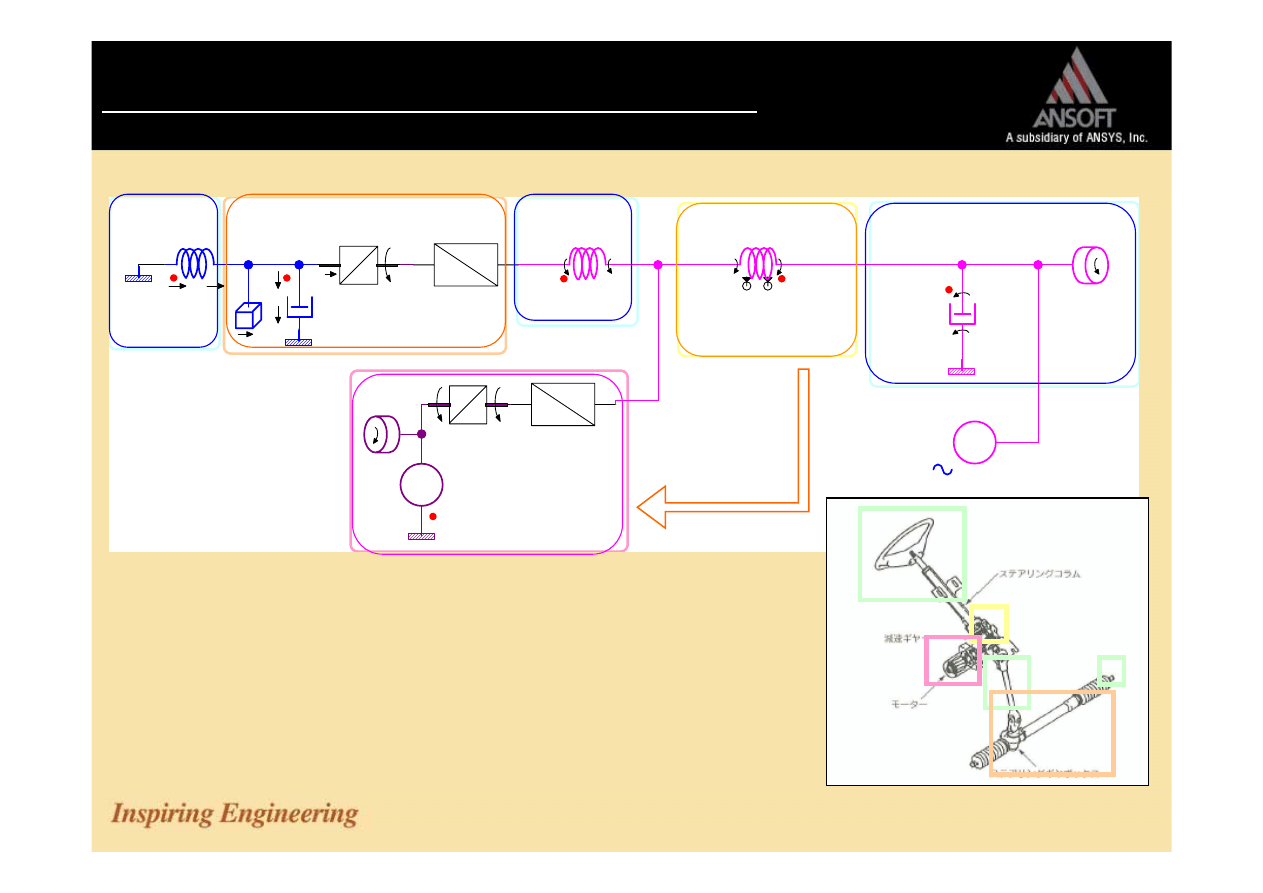
Motion model of steering system.
Steer Angle
Torque detection
1. Steering
1.
2. Torsion bar
2.
3. Intermid shaft
3.
4.Rack & Pinion gear
4.
6.Assist motor
6.
0.025[kgm2]
0.04[Nm s/rad]
130[Nm/rad]
130[Nm/rad]
12[kg]
6500[Ns/m]
210k [N/m]
Gear ratio 4
0.5m[kgm2]
• Reaction force imitates the set end with a high
rigidity spring.
• The detected torque of torsion bar refers from
assit motor.
Steer
inertia
Friction
Twist rigidity
Translation <> rotation
Rotor intertia
5. Reaction
5.
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
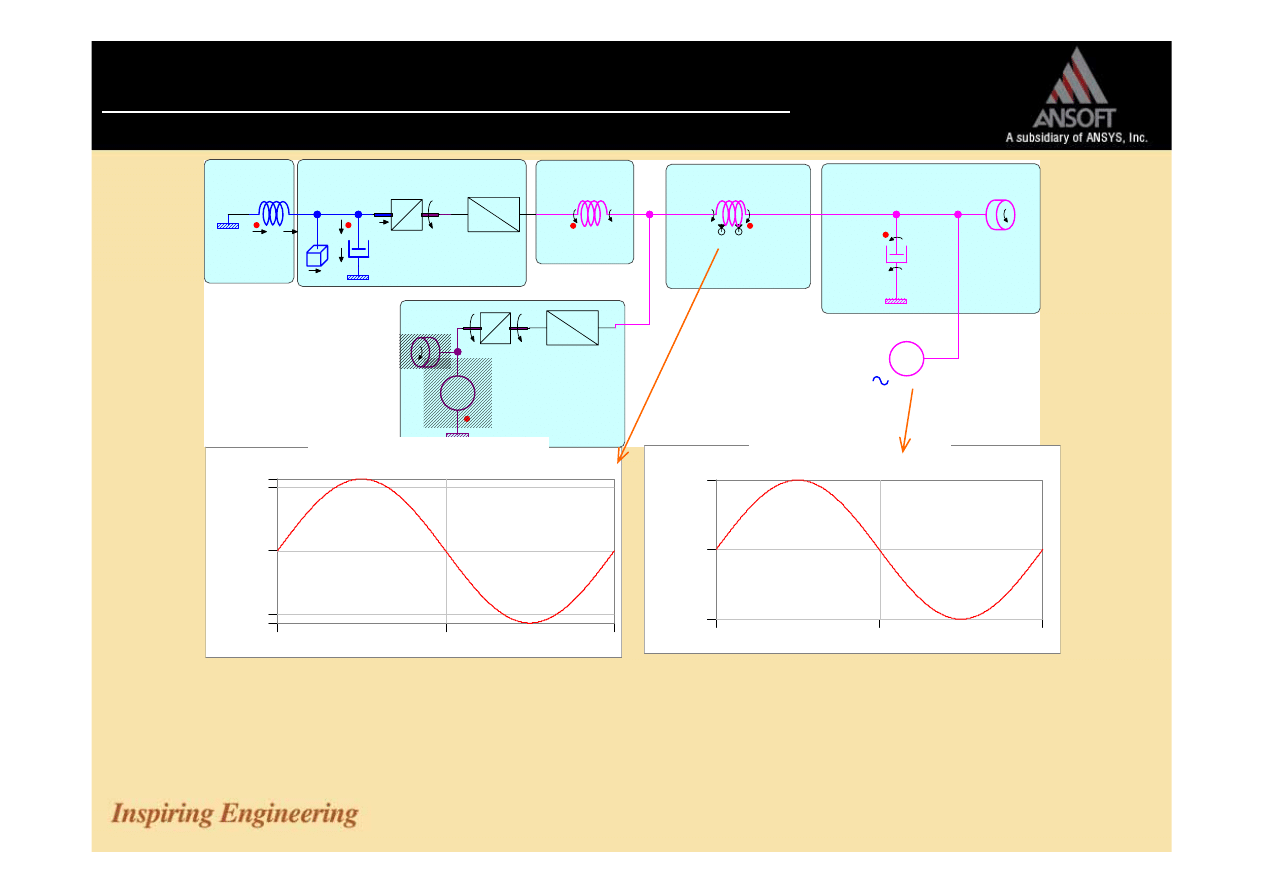
Steering angle and Steering torque
TR1
ROT2
TSF
ROT1 ROT2
TSF
ROT
ROT_V
ROT
ROT_V
T
Φ
+
TBar
-11.40
11.35
0
0
1.00
500.00m
トーションバー・トルク
TBar.TORQUE [Nm]
-10.00
10.00
0
0
1.00
500.00m
操舵量
S_ROTB1.PHI [deg]
Steering Angle
10[deg] 1Hz
Torsion bar
torque
• Input : steering angle 10[deg], 1[Hz]
• Confirm steering torque with out assist system
Steering angle [deg]
Torsion bar torque [deg]
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
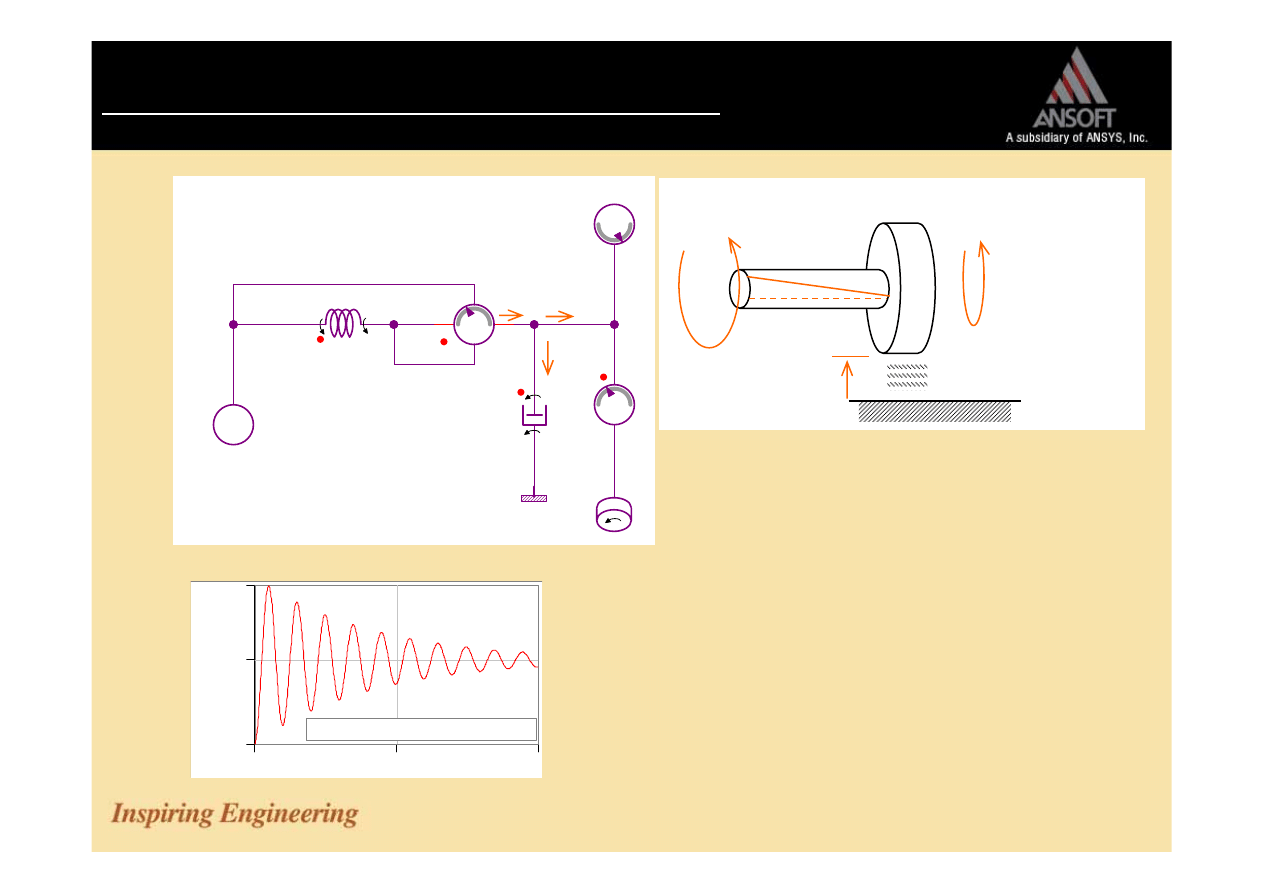
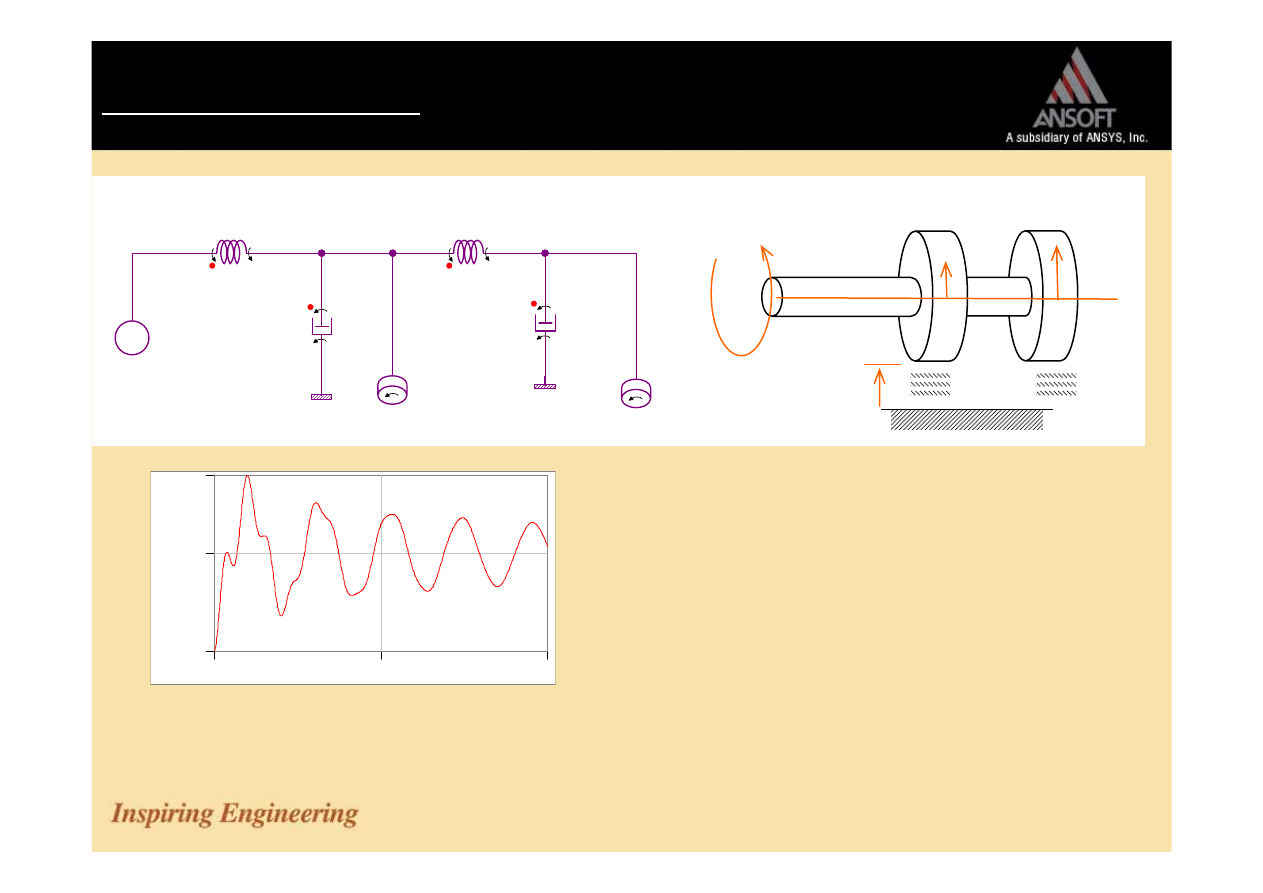
Modeling of motion system
ω
+
ω
+
W
+
DAMPING := .05 Nm*s/rad
C := 10 Nm/rad
VALUE := 10 rad/s
T
Angular speed source
Twist
Rigidity C
DAMPING
Inertia J
Inertia J
Rigidity
Viscous coeff.
1.44n
18.90
10.00
0
20.00
10.00
VM_ROT1.OMEGA [rad/s]
Velocity differential
Speed source
C: Rigidity over an angle difference of twist
Damping: Viscosity over a velocity differential
Tm
Td
Tk
0
=
−
−
Td
Tm
Tk
(
)
dt
D
C
J
∫
=
−
−
=
0
0
0
ω
θ
θ
θ
θ
θ
&
&&
Disturbance
Te =0
・Conservation law of torque.
0
ω
θ
θ
&
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
ω
+
10 rad/s
C := 10 Nm/rad
DAMPING := .05 Nm*s/rad
J := 1 kg m %
C := 10 Nm/rad
DAMPING := .05 Nm*s/rad
J := 2 kg m %
2 DOF system
Angle
Rigidity C
Inertia
Velocity differential
Speed source
0
18.00
10.00
0
20.00
10.00
MASS_ROT2.OMEGA [rad/s]
• Series connection of elasticity
• Easy expansion to the multi body system.
(
)
(
)
(
)
∫
=
−
−
=
−
−
−
−
=
dt
D
C
J
D
C
C
J
0
0
2
2
2
1
2
2
2
1
1
2
1
2
1
0
1
1
1
ω
θ
θ
θ
θ
θ
θ
θ
θ
θ
θ
θ
&
&&
&
&&
1
θ
2
θ
0
ω
Damping
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
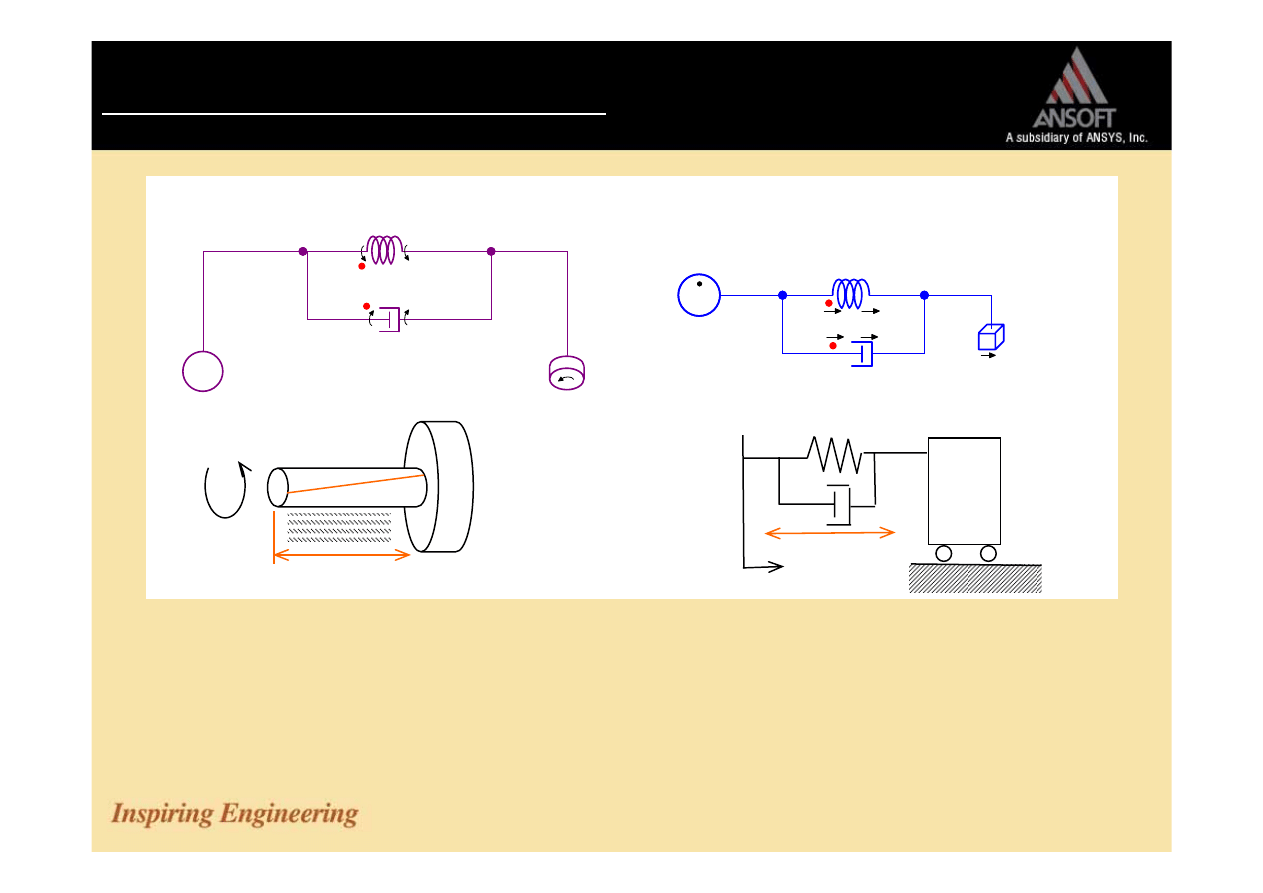
Connecting in parallel
ω
+
10 rad/s
C := 10 Nm/rad
DAMPING := .05 Nm*s/rad
J := 1 kg m %
Velocity differential
S
+
S
VALUE := 10 m/s
DAMPING := .05 N*s/m
C := .1 N/m
M := 1 kg
Velocity differential
• Consider damping to the speed difference in which section.
• Easy understanding where is the reference of a position and an angle
Rotational motion
Translational motion
x
ω
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
GAIN
GAIN
GAIN
N EG
NPG
NPG
NPG
NPG
NPG
NPG
TSP1
TSP4
TSP2
TSP5
TSP3
TSP6
COMP1
COMP2
COMP3
TRIANG1
Vref_u
Vref_v
Vref_w
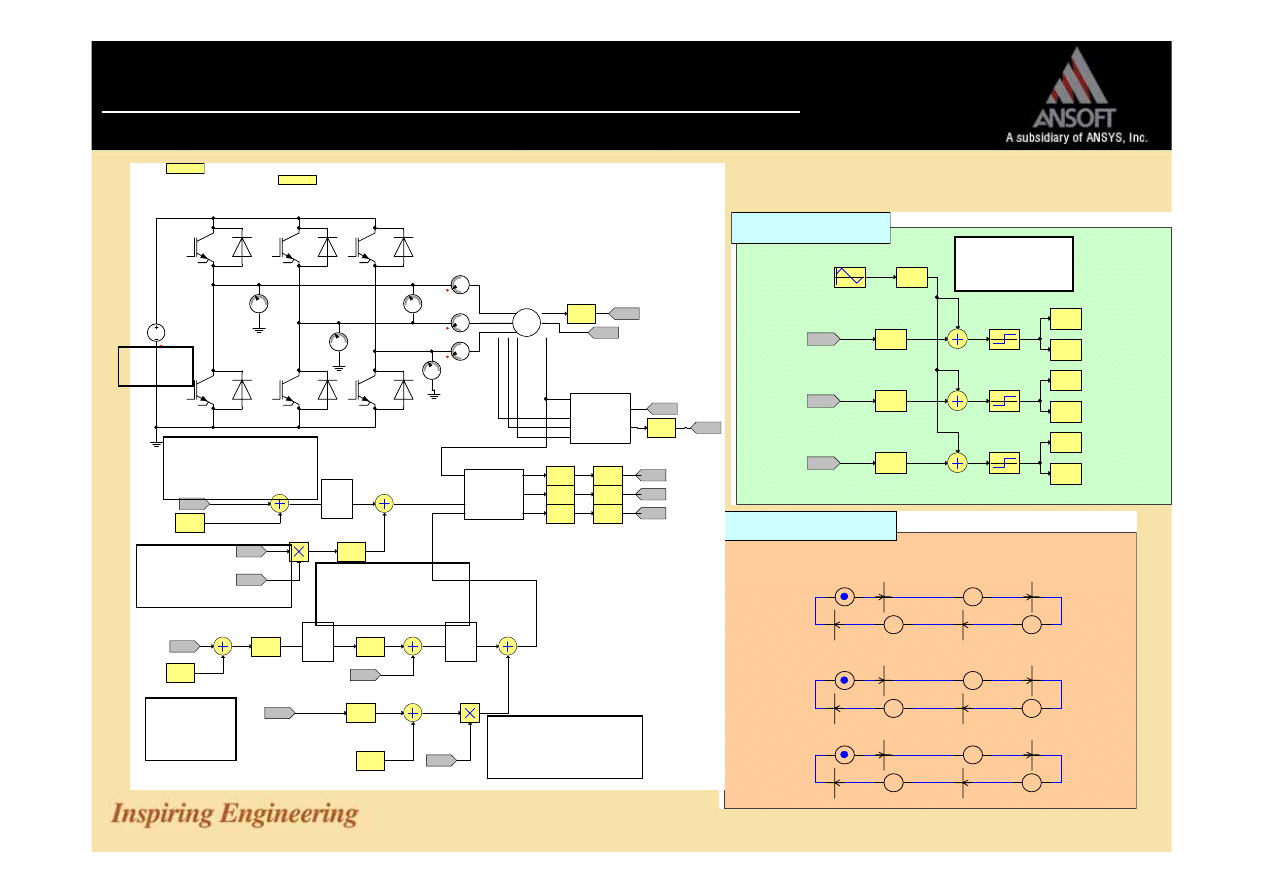
PWM Generator
Vector control of IPM : Basic model
FREQ := 20k
AMPL := 1
SET: := ST4:=0
SET: := ST1:=1
TSP4.VAL=1
SET: := ST4:=0
SET: := ST1:=0
U1
SET: := ST4:=0
SET: := ST1:=0
TSP1.VAL=1
SET: := ST1:=0
SET: := ST4:=1
U2
Dead Time Control
ICA:
deadtime:=5u
Friction:=8e-3
A
A
A
+
V
MS
MS
3 ~
B
A
C
ST1
ST2
ST3
ST4
ST5
ST6
Vdc
DC_bus
AM1
AM2
AM3
Motor
theta
d
q
dq_abc
GAIN
GAIN
GAIN
GAIN
GAIN
GAIN
Vref_u
Vref_v
Vref_w
EQU
Dw:=Friction*Motor.N*2*pi/60
a
b
c
theta
abc_dq
Input
PI_1
CONST
Omega
N
Omega
N
id
id
iq
CONST
Idref
GAIN
Input
PI_2
Input
PI_3
GAIN
GAIN
iq
id
GAIN
CONST
Psi
Omega
GAIN
+
V
VMA
+
V
VMB
+
V
VMC
DC_bus:=12
Motor.KE
Motor.L1D
Motor.P
GAIN
Motor.P
2 * PI/60.0
Motor.L1Q
P_Gain 0.5
I_Gain 2
0.6
20m
P_Gain 13
I_Gain 3
1/(DC_bus/2)
200
PWM carrier = 20kHz
q-axis voltage
compensation
Speed
control
q-axis
current control
d-axis
current control
12[V]
d-axis voltage
compensation
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
Basic Component :
PM 3Phase synchronous motor(SYMP1)
MS
3 ~
B
A
C
N:
Rotor Speed [rpm]
OMEGA: Rotor Angular Velocity [rad/s]
MI:
Inner Torque [Nm]
PHI
Electrical Angle [rad]
PHIDEG
Electrical Angle [deg]
PHIM
Mechanical Angle [rad]
PHIMDEG Mechanical Angle [deg]
PHI := PolePairs * PHIM
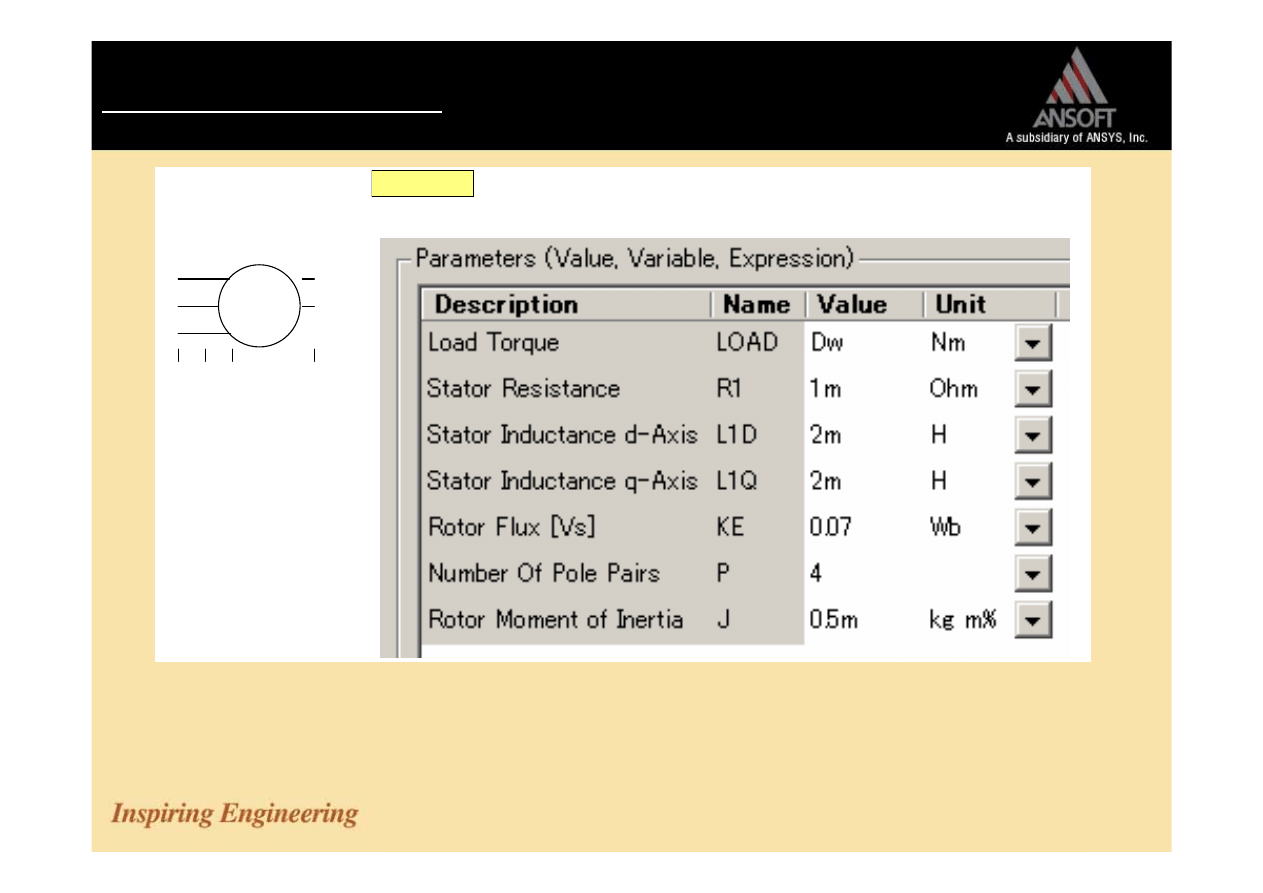
LOAD:
Load torque [Nm]
R1:
Stator Resistance [Ohm]
L1D
d-axis Inductance [H]
L1Q
q-axis Inductance [H]
KE
Rotor Flux [Wb]
P
Pole pairs
J
Rotor Moment of Inertia [kgm
2
]
PWRELEC:
Input Power [W]
PWRMECH:
Output Power [W]
PWRLOSS:
Losses [W]
Input parameters
Output parameters
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
Basic Component :
PM 3Phase synchronous motor(SYMP1)
d
q
q
q
q
d
d
d
p
dt
d
R
i
v
p
dt
d
R
i
v
ωψ
ψ
ωψ
ψ
+
+
⋅
=
−
+
⋅
=
q
q
q
e
d
d
d
L
i
k
L
i
⋅
=
+
⋅
=
ψ
ψ
(
)
{
}
q
d
q
d
q
e
i
i
L
L
i
k
p
mi
⋅
−
+
⋅
=
2
3
dt
d
J
Load
mi
ω
=
−
R
L
q
v
q
e
k
p
ω
〜
dq-Axis Voltage Equation
dq-Axis Flux Linkage
Motor Torque
Equation of Motion
R
L
d
v
d
q
q
i
L
p
ω
d
d
i
L
p
ω
d
i
q
i
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
Input parameters
MS
3 ~
B
A
C
Temporary Load model
Friction := 10.0 e-3
Torque
ω
⋅
= Friction
Dw
EQU
Dw:=Friction*Motor.n*2*pi/6
Dw := Friction * Motor.N * 2 * PI/60
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
MS
3 ~
B
A
C
Mo to r
theta
d
q
d q_ab
GAIN
GAIN
GAIN
GAIN
GAIN
GAIN
Vref_u
Vref_v
Vref_w
a
b
c
theta
ab c_d q
Input
PI_1
Omega
N
Omega
id
iq
id
iq
CONST
Id re
GAIN
Input
PI_3
iq
id
GAIN
CONST
Ps
Omega
GAIN
Motor.KE
Motor.L1D
GAIN
Motor.P
Motor.L1Q
P_Gain 0.5
I_Gain 2
P_Gain 13
I_Gain 3
1/(DC_bus /2)
CONST
TR ef
1
GAIN
1/(1.5 * Motor.KE * Motor.P)
Check : Motor torque control
-50.00u
935.00m
500.00m
0
60.00m
20.00m
40.00m
モータトルク [Nm]
Motor.MI [(kg m)/s]
• Convert the reference torque into iq
• Check the following capability and steady-state error at reference torque = 1[Nm]
(
)
{
}
q
d
q
d
q
e
i
i
L
L
i
k
p
mi
⋅
−
+
⋅
=
2
3
Motor torque
Motor Torque [Nm]
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
Parametric : searching gains for torque control
-10.00m
1.84
1.00
0
60.00m
20.00m
40.00m
モータート ルク [Nm] /KP
-5.00m
940.00m
500.00m
0
60.00m
20.00m
40.00m
モータトルク [Nm] / KI
KP valid
KI fixed=3
KP fixed=13
KI valid
KP = 0.1
0.2
0.8
1
2
8
10
20
KP = 20
KP=0.1
KI = 0.1
0.2
0.8
1
2
8
10
20
KI = 20
KI = 0.1
KP = 2
Check : KP
following capability
Check : KI
Steady state error
• Gain KP influences the following capability.
• In this case, KP >= 2 is required.
Motor Torque [Nm] / KP
Motor Torque [Nm] / KI
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
TR1
ROT2
TSF
ROT1 ROT2
TSF
ROT
ROT_V
ROT
ROT_V
T
Φ
+
TBar
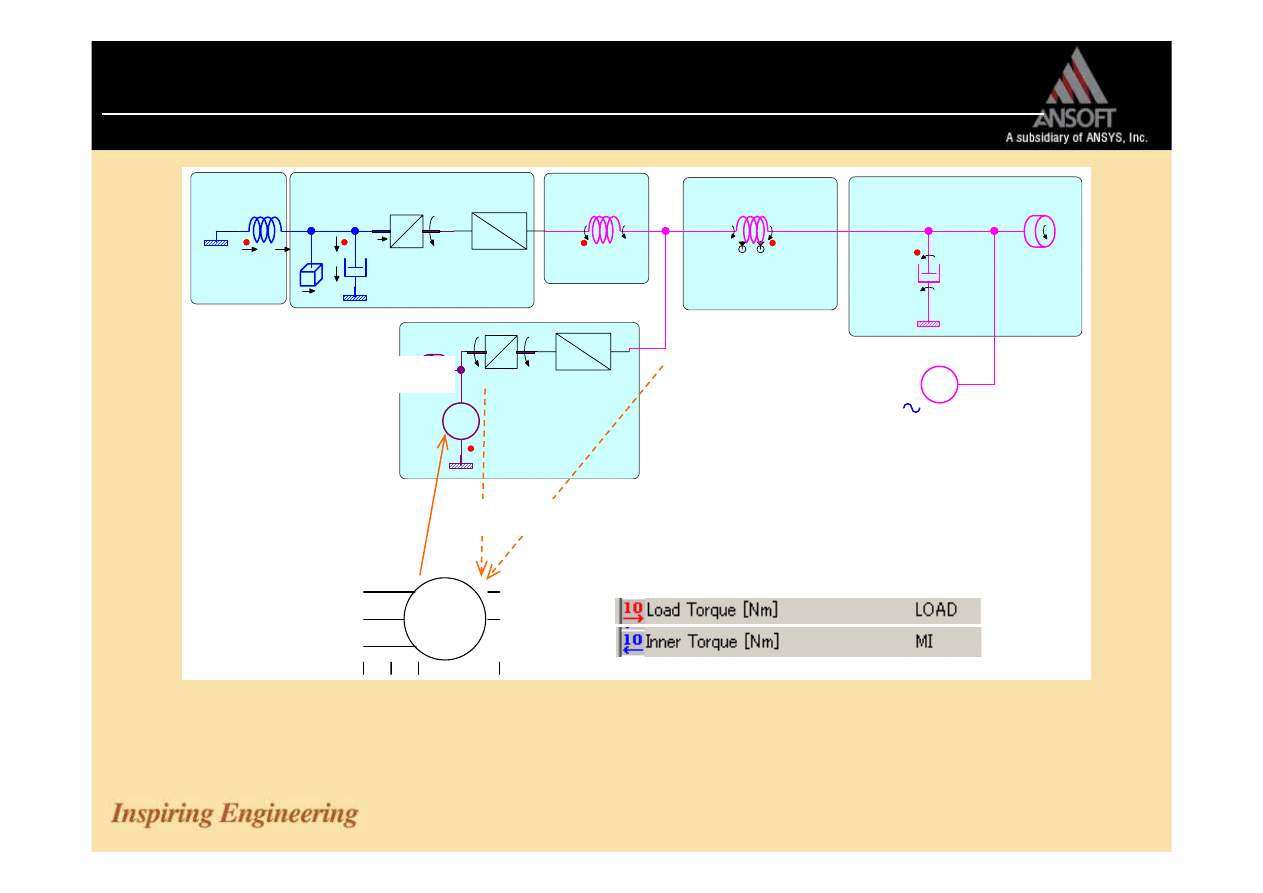
The load model system and motor torque
MS
3 ~
B
A
C
Torque Source
• The load torque in standard SML motor model is defined as a simple signal.
• How much torque should we refer as load ?
The parameter display of a SML motor model.
Motor torque
Where can we get the load torque ??
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
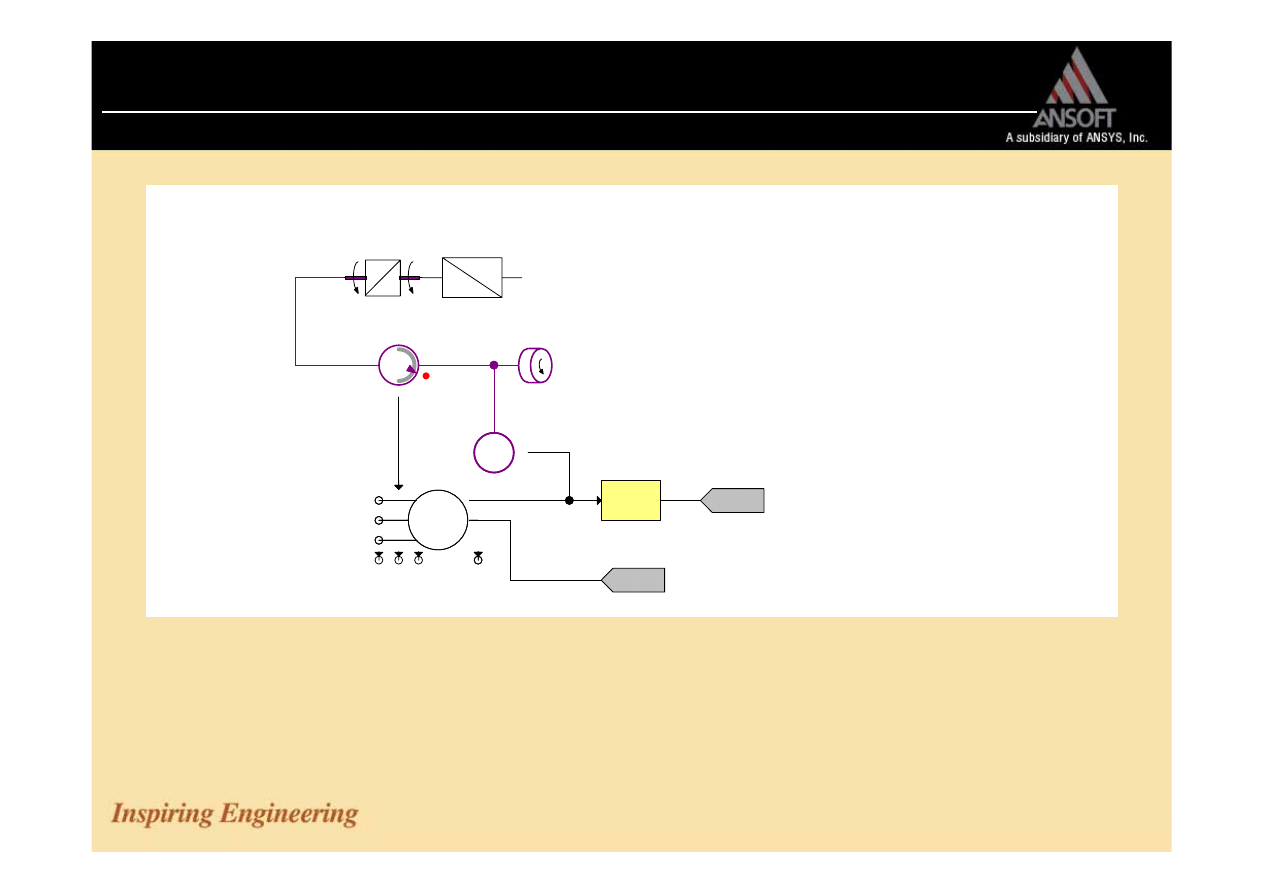
Intricate case : Described as individual system.
MS
3 ~
B
A
C
MS
3 ~
B
A
C
Motor
Omega
N
GAIN
Motor.P
ROT1
ROT2
TSF
ROT
ROT_V
T
ROTB_ROT3
+
ω
+
Motor.J
OMEGA
LOAD
• Load torque from axis.
• Add rotor inertia.
• Motor speed is compelled to axis
OR
• Motor torque is compelled to axis
• Note that the direction of the torque meter.
• Don’t forget that the addition of rotor inertia at the terminal.
• Though thinking the motor to be a torque source…
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
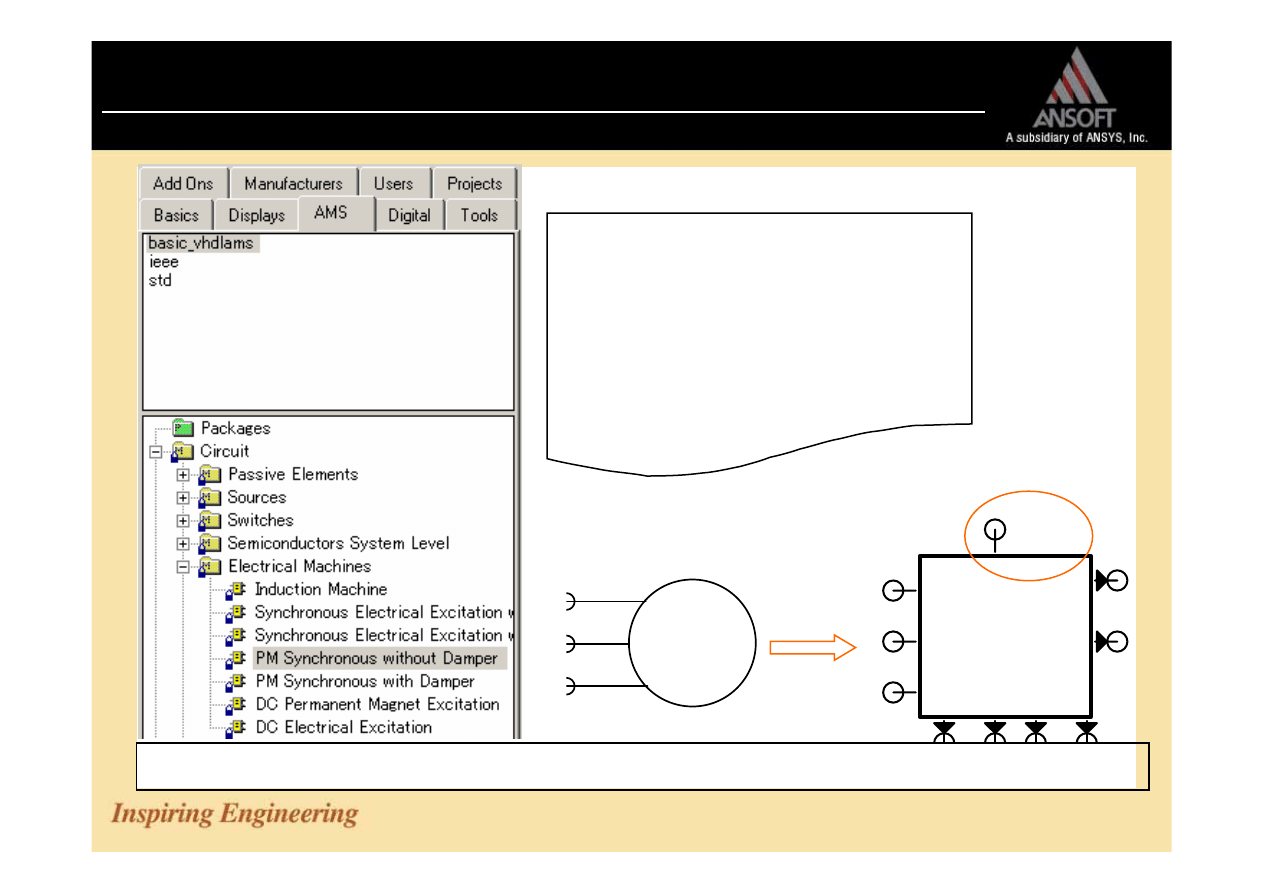
Improvement motor model : using VHDL-AMS
shaft
c
b
a
Motor
LIBRARY
IEEE;
USE
IEEE.ELECTRICAL_SYSTEMS.ALL;
USE
IEEE.MECHANICAL_SYSTEMS.ALL ;
USE
IEEE.MATH_REAL.ALL;
ENTITY
SYMP
IS
GENERIC
(
L1d : INDUCTANCE :=
0.042
;
L1q : INDUCTANCE :=
0.042
;
…..
MS
3 ~
B
A
C
・ Equal 3PH synchronous motor model included in AMS library.
• Improve the AMS model to create the shaft output to connect mechanical model.
Copy the definition and create subsheet.
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
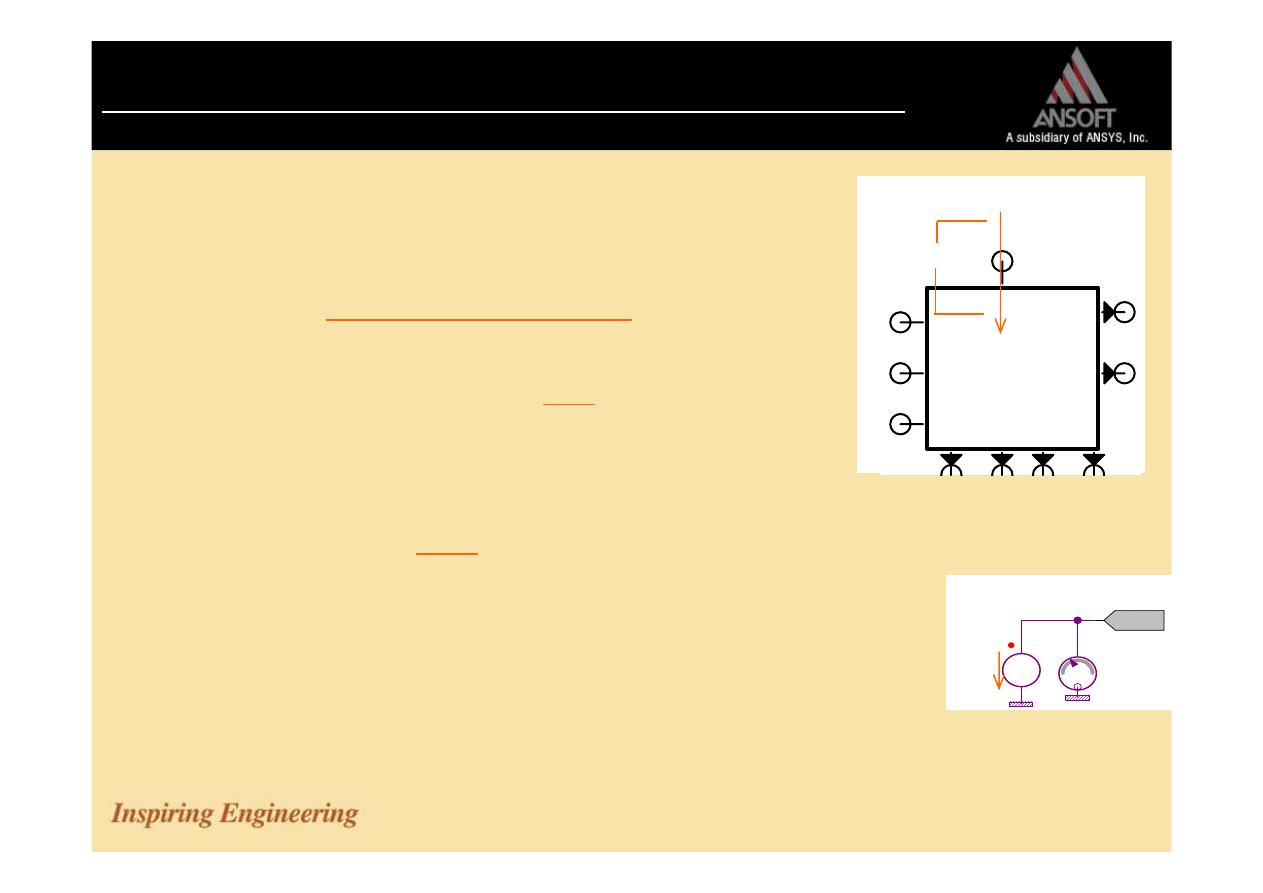
• Addition of a rotation system terminal
• Quantity definition
• Equation of motion
Improvement of VHDL-AMS motor model.
PORT
(
TERMINAL
a, b, c : ELECTRICAL;
TERMINAL
shaft : ROTATIONAL_V ;
shaft
c
b
a
Motor
QUANTITY
omega
across
load
through
shaft
to
ROTATIONAL_V_REF ;
mi ==
3.0
/
2.0
* P * (psi1d * i1q - psi1q * i1d);
j * omega‘dot == mi + load ;
mi : motor torque
P : pole pairs
psi1d, psi1q : d,q axis flux
load
omega
+
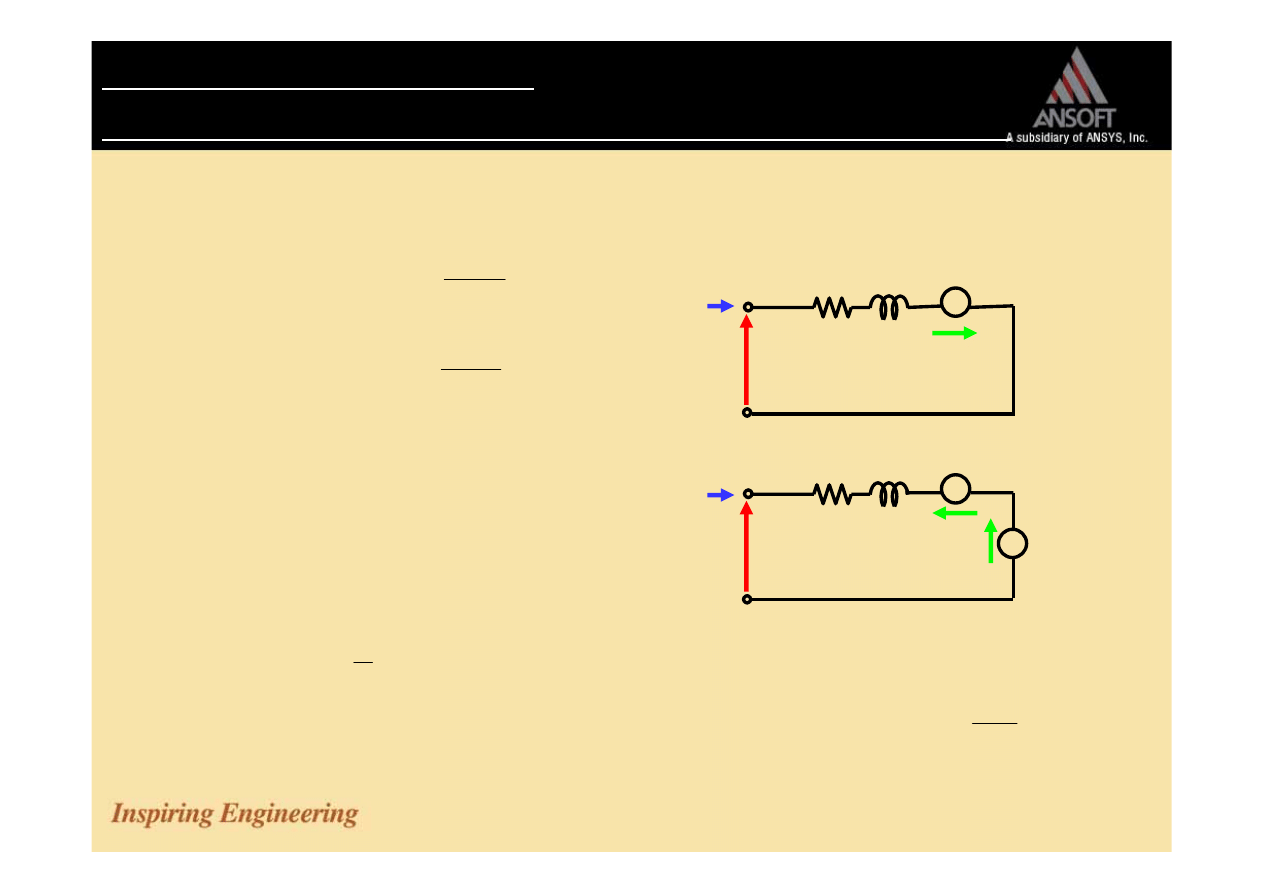
• “shaft
to
ROTATIONAL_V_REF” expresses the direction which
load torque flows.
Note that the direction is opposite with “load” of a standard model.
⇒ With equation of motion, “load” should be added.
T
shaft
ω
+
omega
load
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
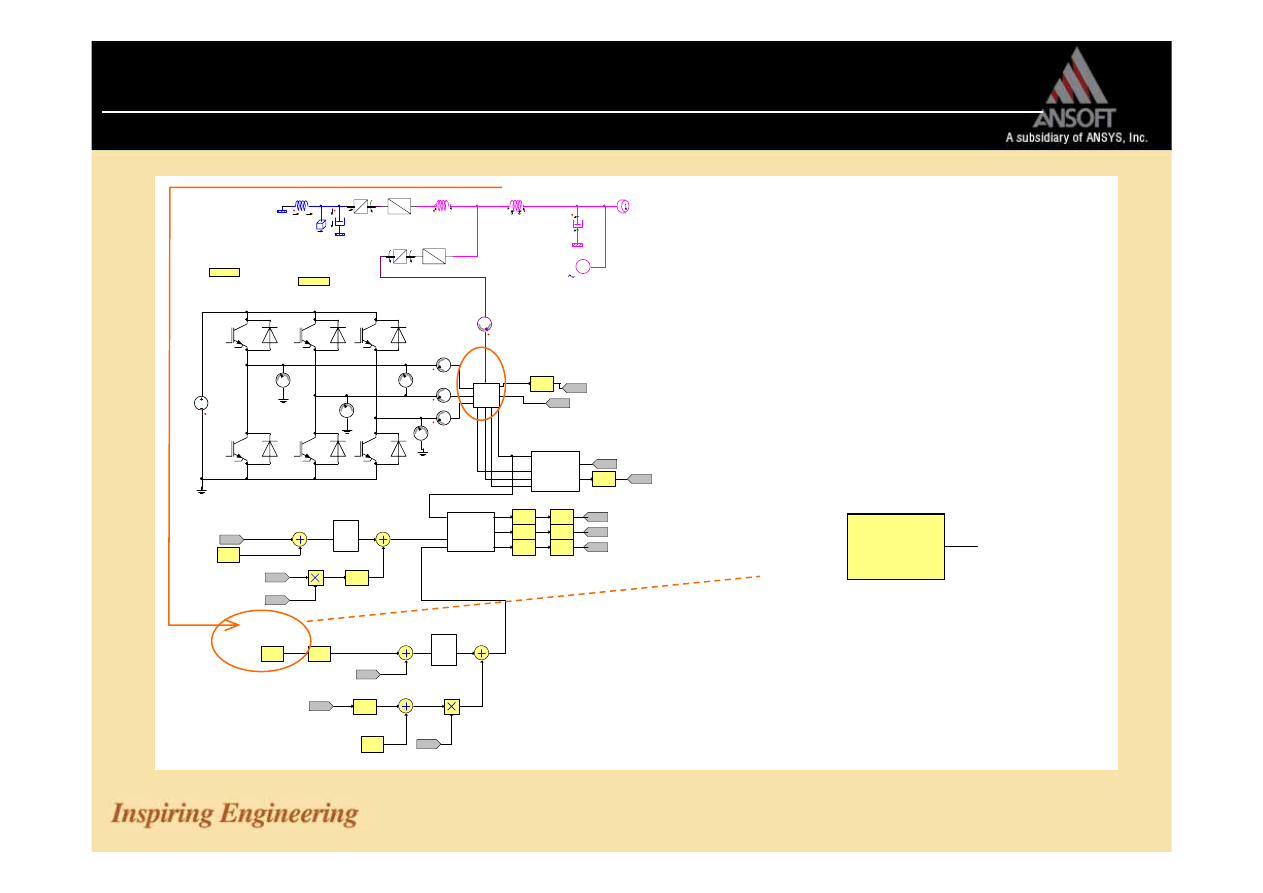
Integrate Steering model and electrical system.
ICA:
deadtime:=5u
Friction:=8e-3
A
A
A
+
V
ST1
ST2
ST3
ST4
ST5
ST6
Vdc
DC_bus
AM1
AM2
AM3
theta
d
q
dq_abc
GAIN
GAIN
GAIN
GAIN
GAIN
GAIN
Vref_u
Vref_v
Vref_w
EQU
Dw:=Friction*Motor.n*2*pi/60
a
b
c
theta
abc_dq
Input
PI_1
Omega
N
Omega
id
iq
id
iq
C ON ST
Idref
GAIN
Input
PI_3
iq
id
GAIN
C ONST
Psi
Omega
GAIN
+
V
VMA
+
V
VMB
+
V
VMC
DC bus:=12
Motor.ke
Motor.l1d
GAIN
Motor.p
Motor.l1q
P_Gain 0.5
I_Gain 2
P Gain 13/*20*/
I Gain 3 /*0.2*/
1/(DC_bus/2)
C ON ST
TRef
TBar.TORQUE
GAIN
1/(1.5 * Motor.ke * Motor.p)
TR1
ROT2
TSF
ROT1
ROT2
TSF
ROT
ROT_V
ROT
ROT_V
Φ
+
TBar
shaft
c
b
a
Motor
T
FM_ROT1
Reference
Torque
CONST
CONST
TRef
TBar.TORQUE
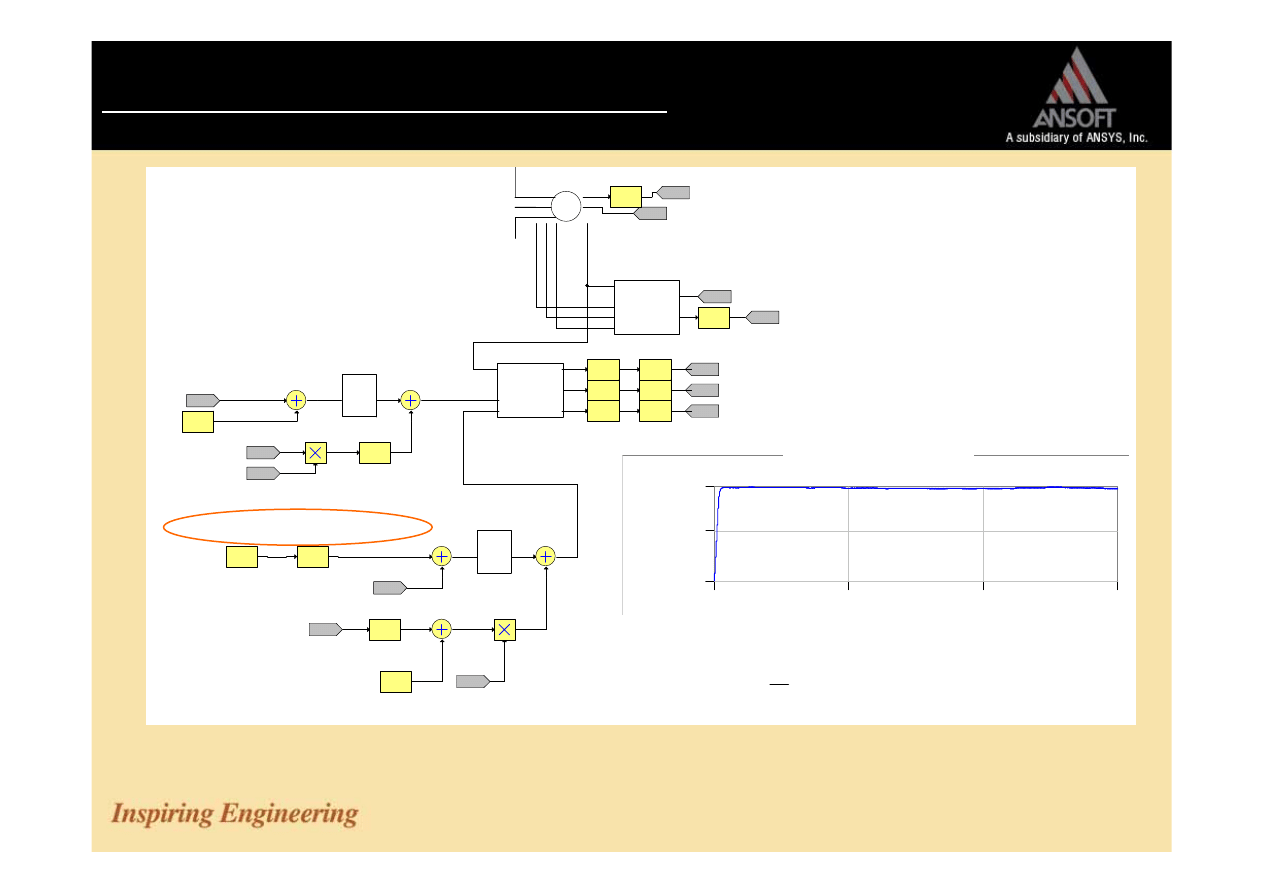
1) Connect motor shaft terminal to steering model.
2) Add torque reference value into a control block.
• Refer to torsion bar torque.
(1)
(2)
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
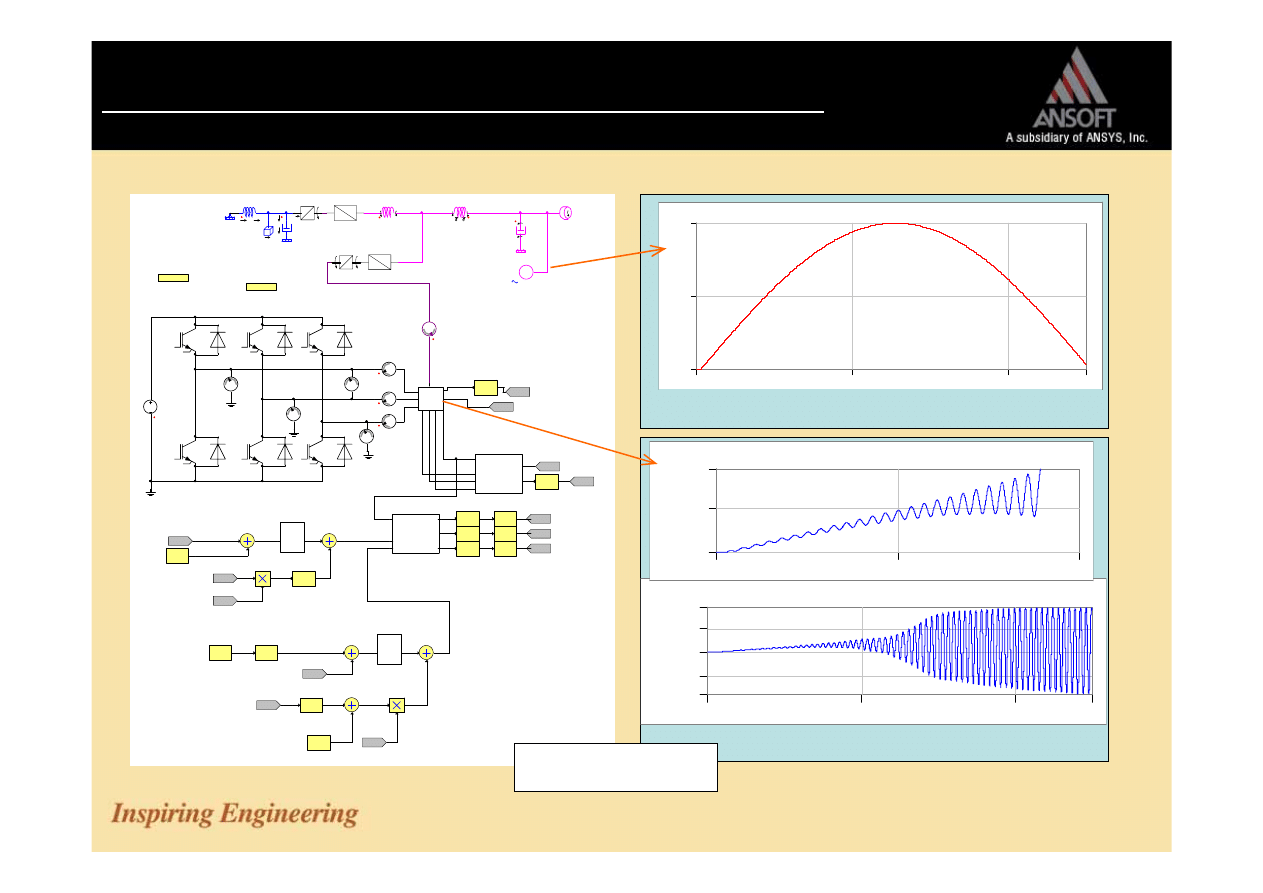
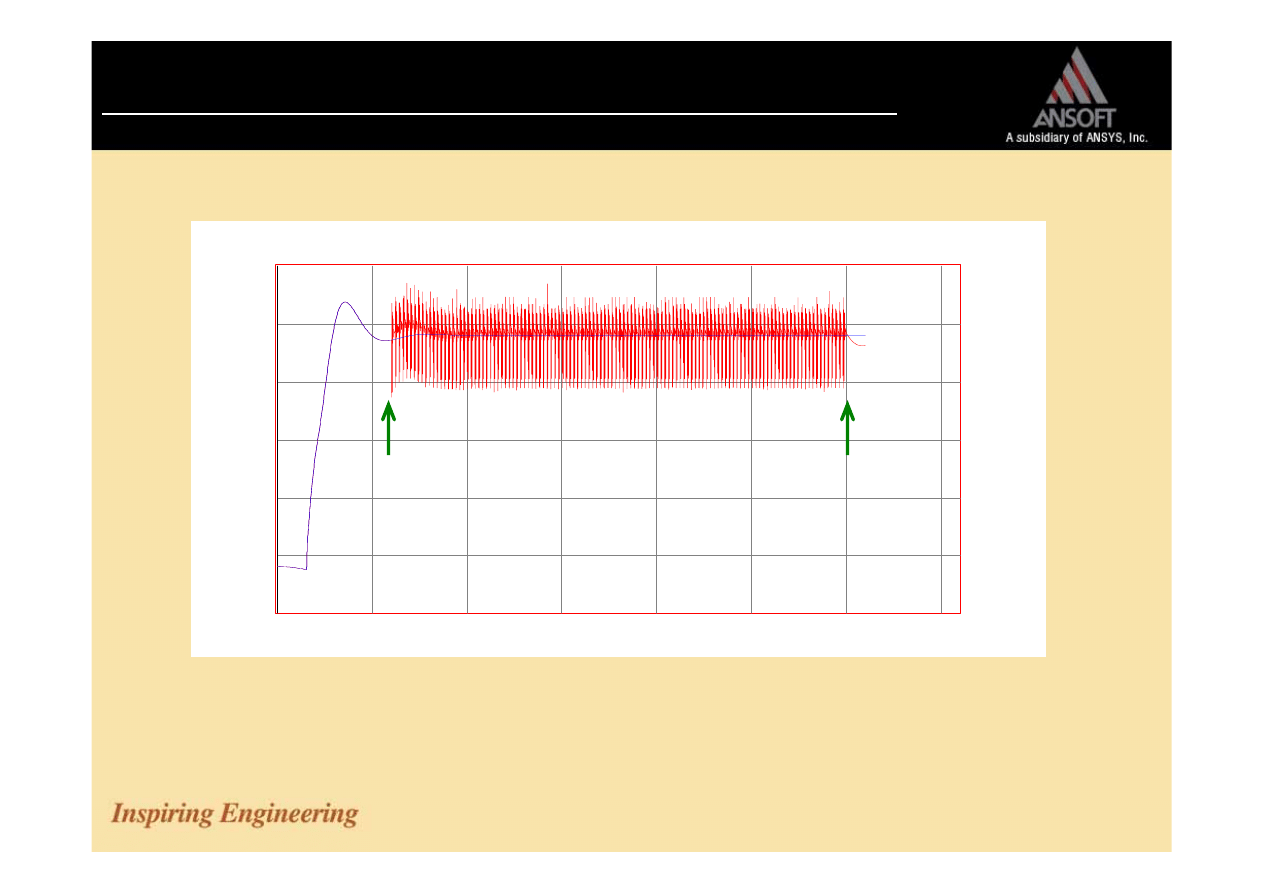
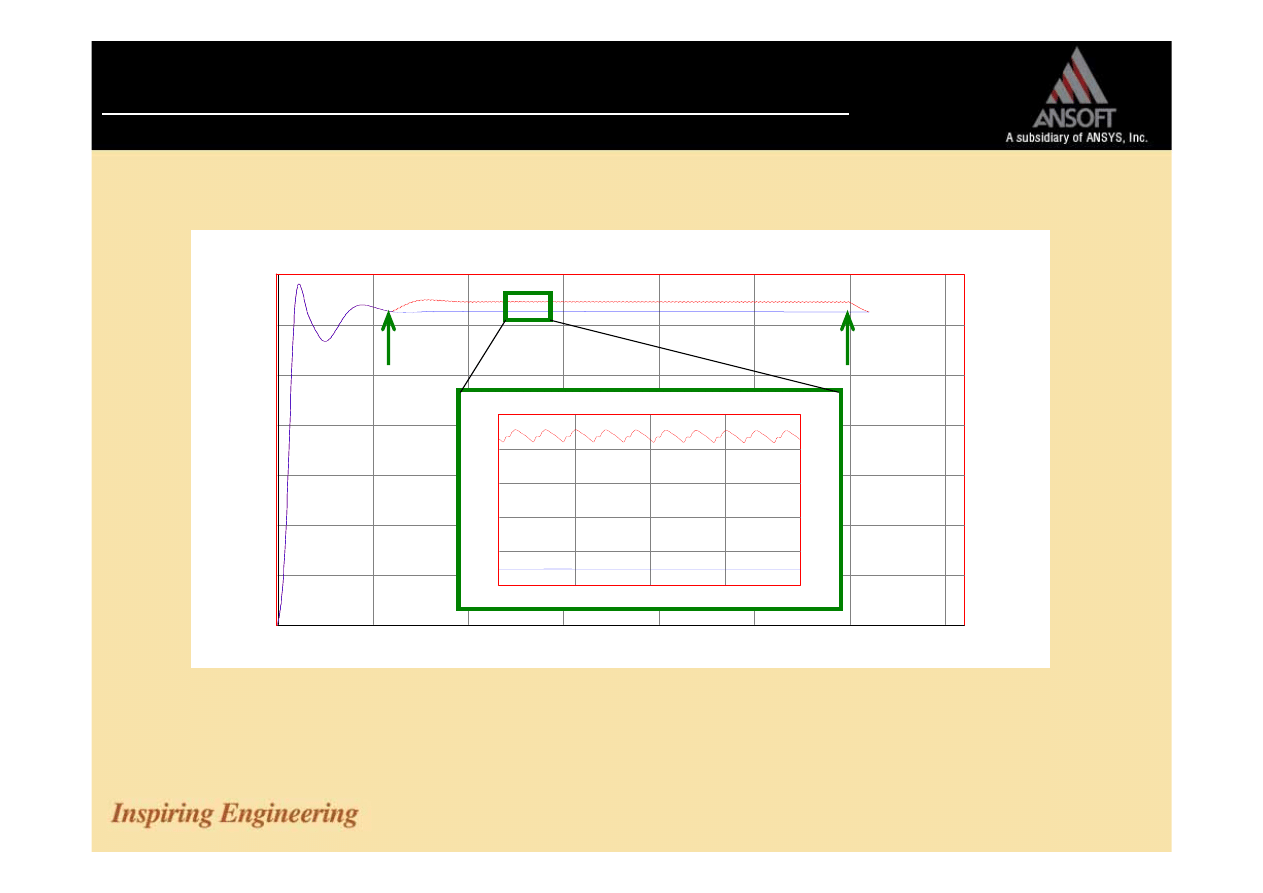
Integrated model : Simulation result.
0
10.00
5.00
0
500.00m
200.00m
400.00m
操舵量 [d...
S _ROT B 1.PHI [deg
-36.00
38.50
0
0
500.00m
200.00m
モータトルク [Nm]
Motor.mi
-5.00m
9.45
5.00
0
200.00m
100.00m
モータトルク [Nm]
Motor.mi
ICA:
deadtime:=5u
Friction:=8e-3
A
A
A
+
V
ST1
ST2
ST3
ST4
ST5
ST6
Vdc
DC_bus
AM1
AM2
AM3
theta
d
q
dq_abc
GAIN
GAIN
GAIN
GAIN
GAIN
GAIN
Vref_u
Vref_v
Vref_w
EQU
Dw:=Friction*Motor.n*2*pi/60
a
b
c
theta
abc_dq
Input
PI_1
Omega
N
Omega
id
iq
id
iq
CONST
Idref
GAIN
Input
PI_3
iq
id
GAIN
CONST
Psi
Omega
GAIN
+
V
VMA
+
V
VMB
+
V
VMC
DC_bus:=12
Motor.ke
Motor.l1d
GAIN
Motor.p
Motor.l1q
P_Gain 0.5
I_Gain 2
P Gai n 13/*20*/
I Gain 3 /*0.2*/
1/(DC_bus/2)
CONST
TRef
TBar.TORQUE
GAIN
1/(1.5 * Motor.ke * Motor.p)
TR1
ROT2
TSF
ROT1
ROT2
TSF
ROT
ROT_V
ROT
ROT_V
Φ
+
TBar
shaft
c
b
a
Motor
T
FM_ROT1
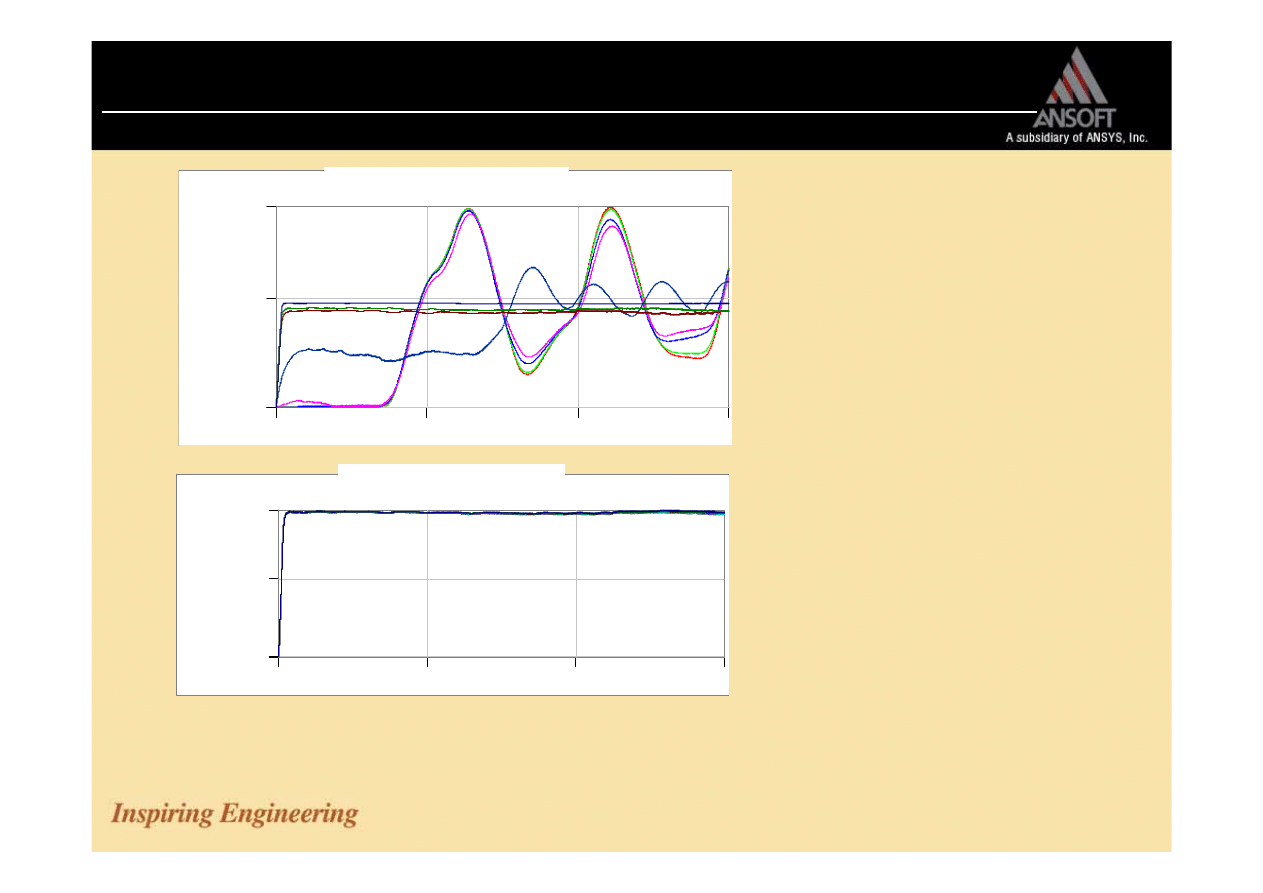
Steering Angle [deg]
Time < 200ms
Whole time
Motor Torque [Nm]
•
Oscillation !!
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
Frequency response of mechanics
Φ
+
TBar
D2D
D2D1
T
Steering Inertia
BodePlotSel3
TBar.TORQUE
Gain
Phase
1
1
2
2
3
3
4
4
5
5
6
6
10
10
20
20
30
30
50
50
100
100
200
200
400
400
1k
1k
1
1
2
2
3
3
4
4
5
5
6
6
10
10
20
20
30
30
50
50
100
100
200
200
400
400
1k
1k
-75.00
-50.00
-25.00
0.00
25.00
-75.00
-50.00
-25.00
0.00
25.00
0.00
45.00
90.00
135.00
180.00
0.00
45.00
90.00
135.00
180.00
f [Hz]
f [Hz]
[dB]
[deg]
Inertia of Motor
• The resonance point by the inertia
of motor is seen in 100Hz.
• other point 8Hz caused by the
steering inertia.
Transfer ratio : Steering Torque/Motor Torque
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
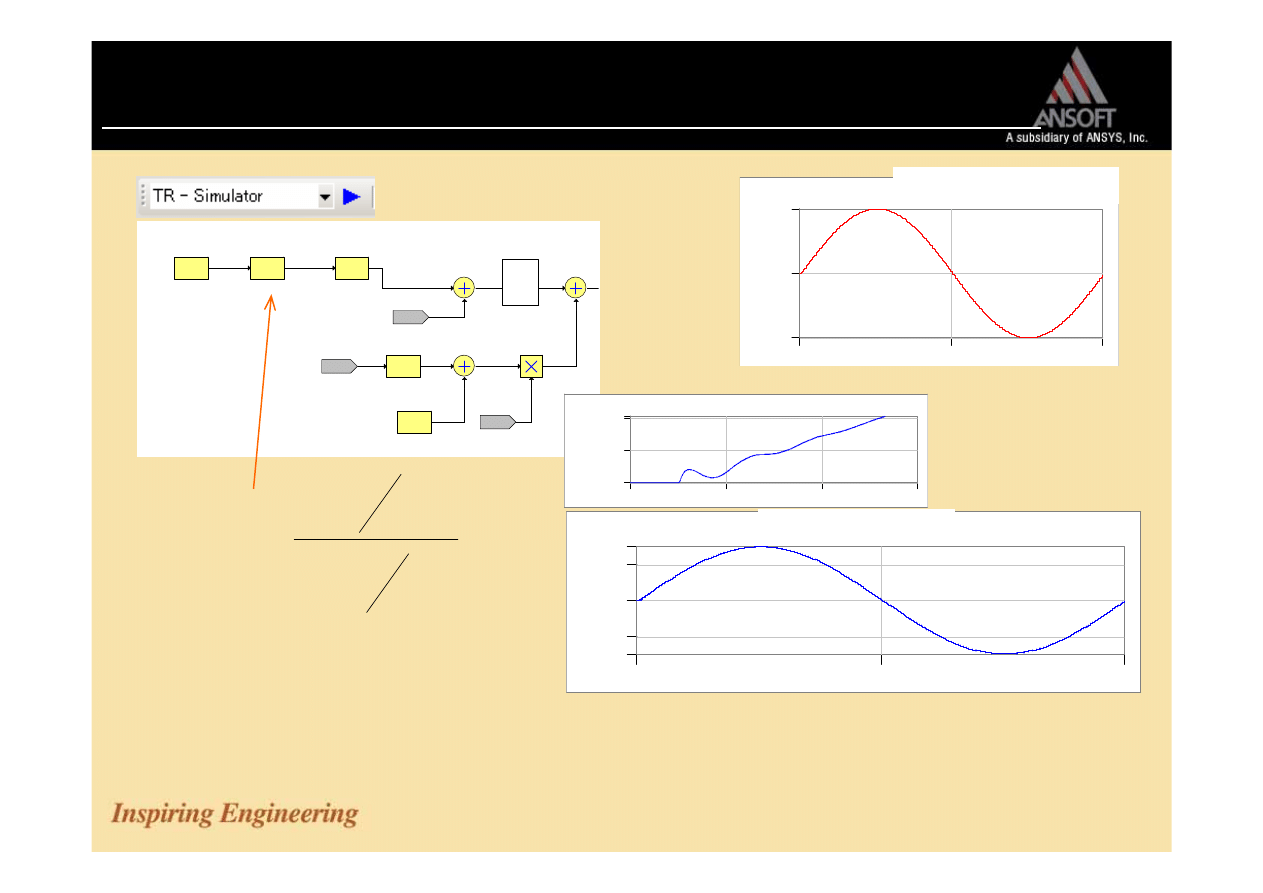
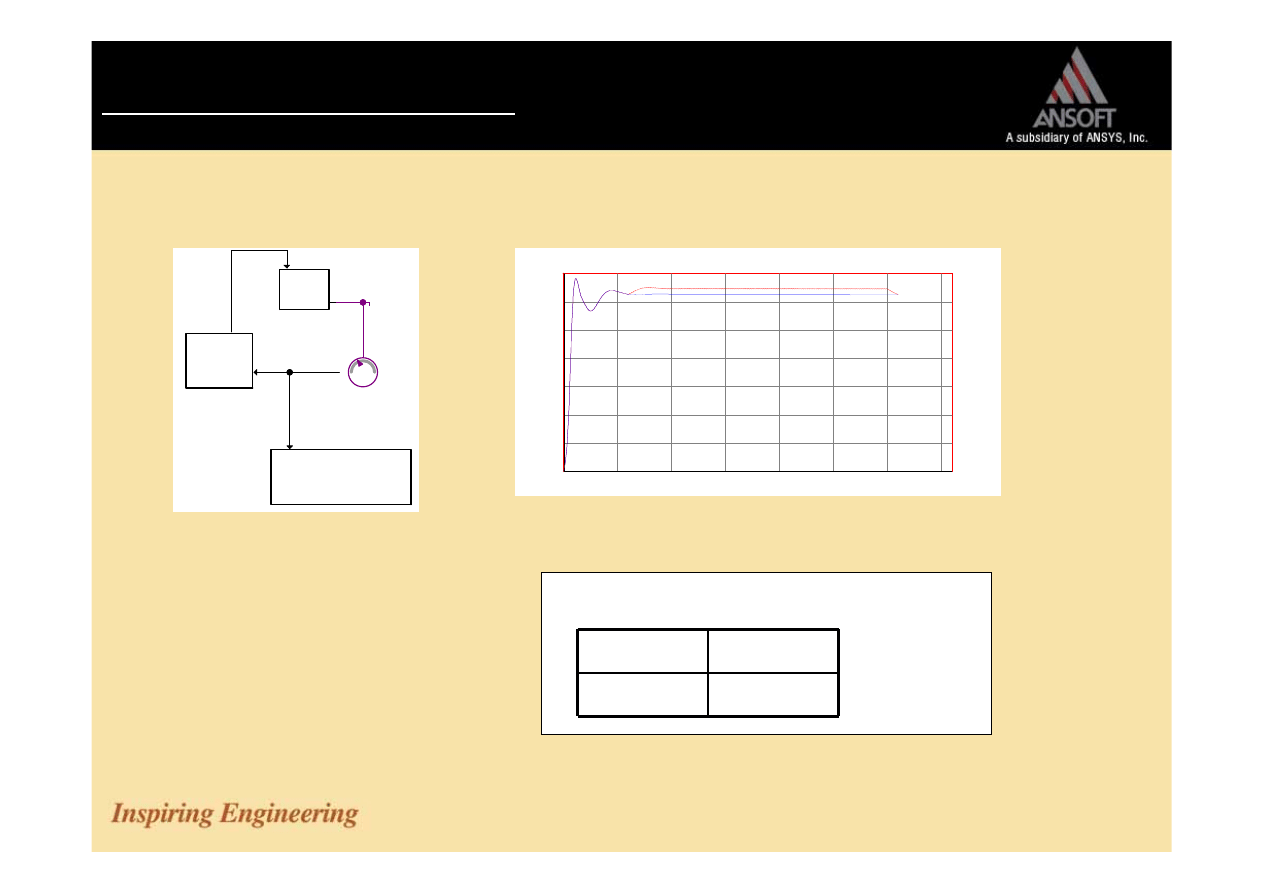
Oscillation control / phase compensation
Input
PI_3
iq
id
GA IN
C ON ST
Ps
Omeg a
Motor.ke
Motor.l1d
P Gain 13 /*20*/
I Gain 3 /*10 */
C ON ST
TR ef
TBar.TORQUE
GA IN
1/(1.5 * Motor.ke * Motor.p)
G(s)
GS1
-10.00
10.00
0
0
1.00
500.00m
操舵 量
S _ROT B 1.P HI [deg
-7.60
7.55
0
0
1.00
500.00m
モータトルク [Nm]
Motor.mi
-1.00m
1.03
500.00m
0
30.00m
10.00m
20.00m
モータトルク [Nm]
Motor.mi
Motor Torque
(Zoom )
( )
s
s
G
c
c
s
⎟
⎠
⎞
⎜
⎝
⎛
+
⎟
⎠
⎞
⎜
⎝
⎛
+
=
ω
ω
1
.
0
1
1
1
Primary progress compensation
• The oscillation frequency of the mechanical system was avoided and
the torque assistance was attained.
Steering Angle 10[deg]
Motor Torque [Nm]
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
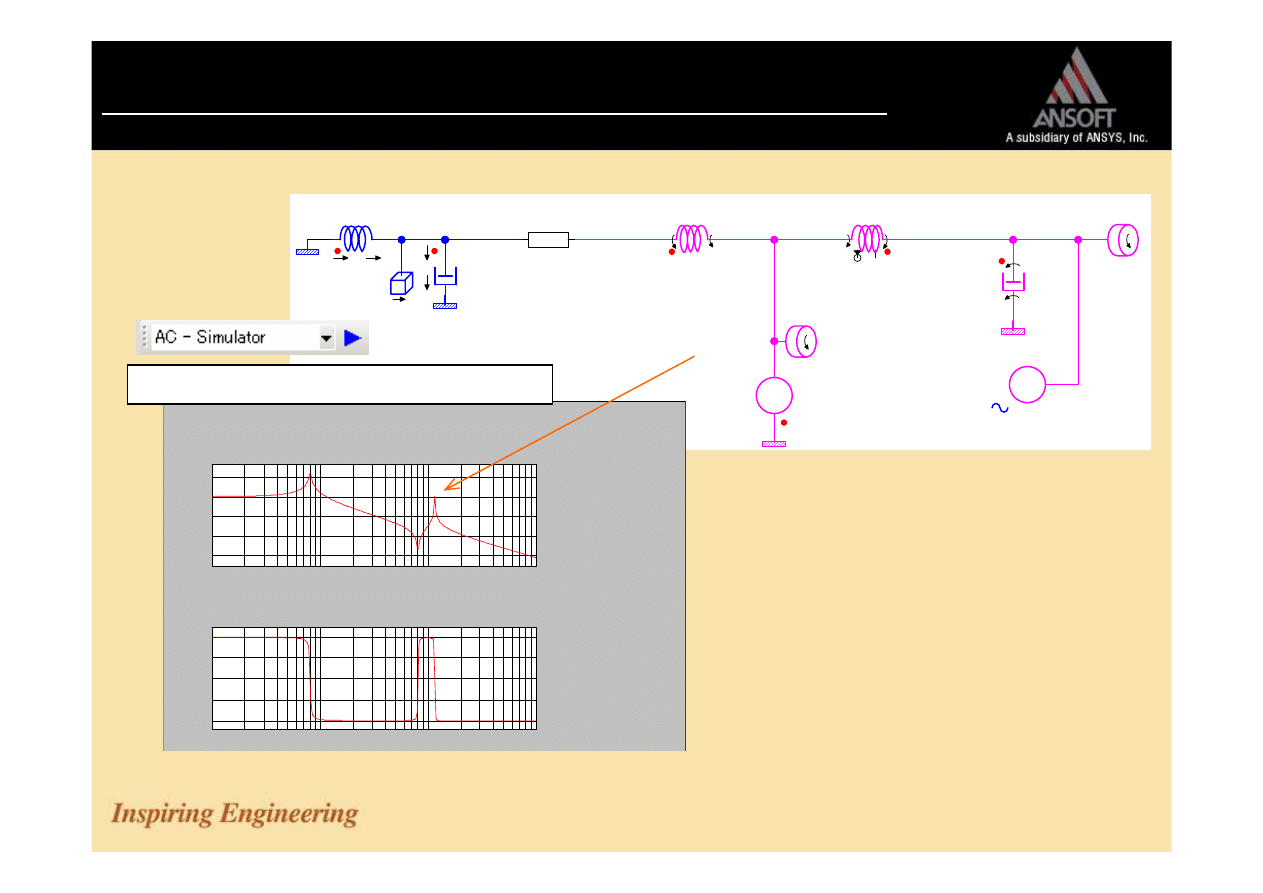
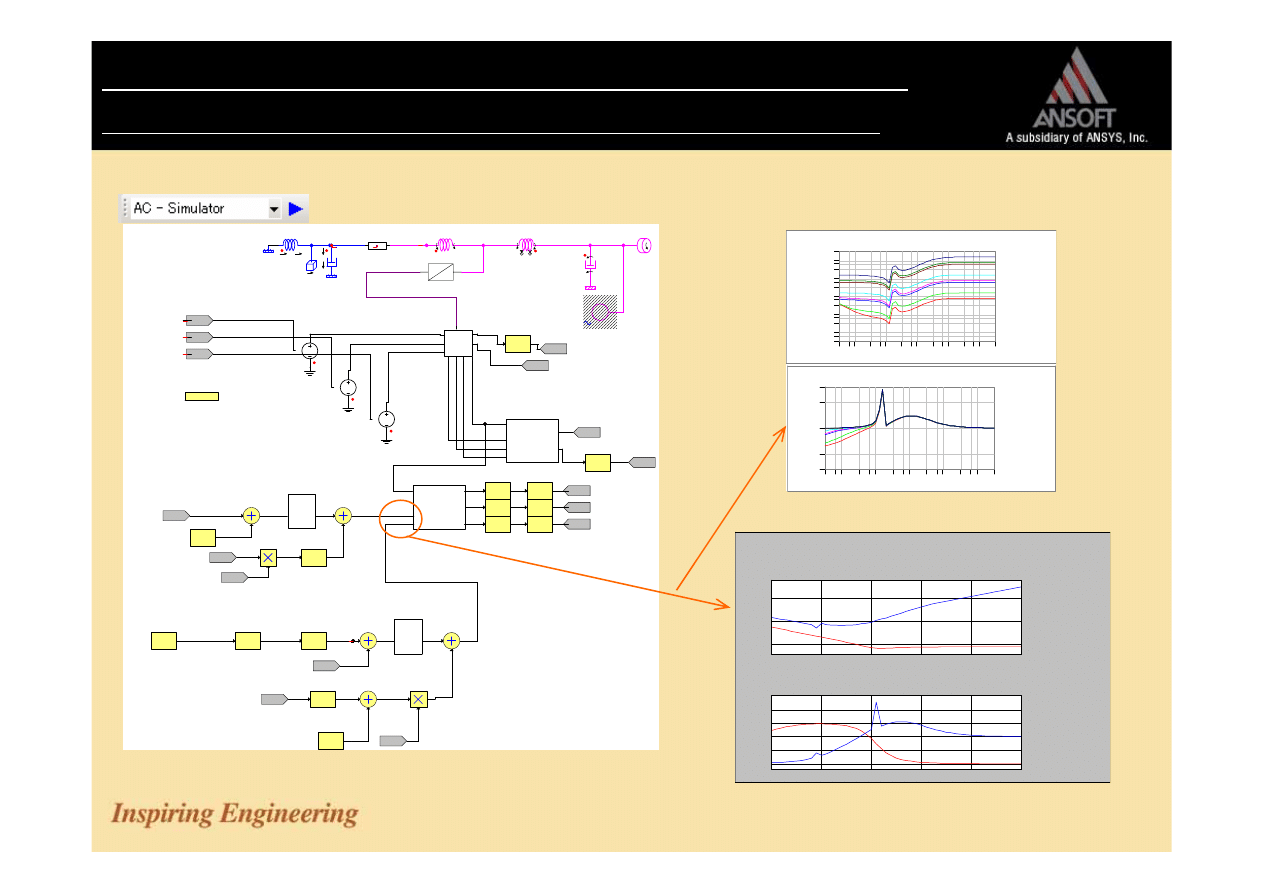
VHDL-AMS model can use AC simulation.
System stability : mechanics + controls
shaft
c
b
a
Motor
E1
E2
E3
Φ
+
D2D
ROT
ROT_V
TBar
D2D1
theta
d
q
GAIN
GAIN
GAIN
GAIN
GAIN
GAIN
a
b
c
theta
Input
CONST
GAIN
Input
GAIN
CONST
GAIN
GAIN
CONST
GAIN
G(s)
dq_abc
1/(DC_bus/2)
Vref_u
Vref_v
Vref_w
abc_dq
PI_1
P_Gain 0.5
I_Gain 2
Omega
N
Omega
id
id
iq
Idref
Motor.l1q
PI_3
P_Gain 13/*13*/
I_Gain 3 /*3*/
iq
id
Motor.l1d
Psi
Motor.ke
Omega
Motor.p
TRef
TBar.TORQUE
1/(1.5 * Motor.ke * Motor.p)
GS1
ICA:
Friction:=8e-3
deadtime:=5u
DC_bus:=12
iq
Vref_u
Vref_v
Vref_w
BodePlotSel9
dq_abc.d
dq_abc.q
Gain
Phase
1
1
10
10
100
100
1k
1k
10k
10k
100k
100k
1
1
10
10
100
100
1k
1k
10k
10k
100k
100k
136.82
0.00
50.00
100.00
136.82
0.00
50.00
100.00
44.85
-180.00
-135.00
-90.00
-45.00
0.00
44.85
-180.00
-135.00
-90.00
-45.00
0.00
f [Hz]
f [Hz]
[dB]
[deg]
Transfer characteristic of control system
10.00u
1.00
200.00u
2.00m
20.00m
1.00
100.00k
20.00 200.00 2.00k
2DGraphSel5
dq_ab...
dq_ab...
dq_ab...
dq_ab...
dq_ab...
dq_ab...
dq_ab...
dq_ab...
-3.14
3.14
0
1.00
100.00k
10.00 100.00 1.00k
2DGraphSel5
dq_ab...
dq_ab...
dq_ab...
dq_ab...
dq_ab...
dq_ab...
dq_ab...
dq_ab...
GAIN
PHASE
Transfer characteristic of control system ( KP dependency)
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
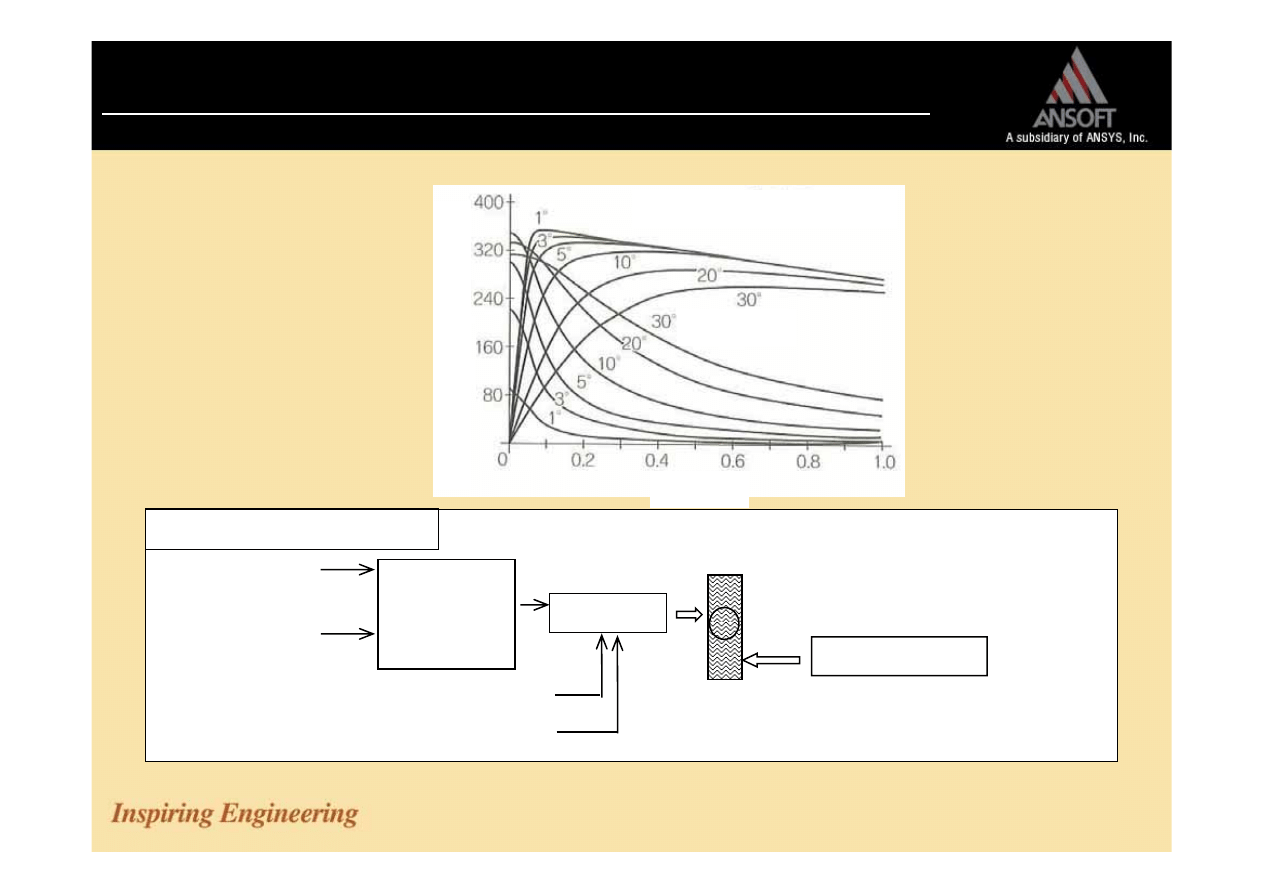
The modeling of side-force by a tire.
Slip rate
Side angle
Traction force, Side fo
rce [kgf]
Perpendicular load 380[kgf]
Side force
Slip rate
Slip
Vehicle speed
Slip angle
Rotational
Speed of tire
Load
Force of Rack F
Diagram of side force of Tire
Gap of a rack and rotational center : R
Sidewall equivalent radius : Rc
Ref. ISBN 4-381-08855-7
β
Fs
v
ω
v
V
mg
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
VHDL-AMS code
R
V
F
R
T
×
=
×
=
ω
)
,
(
/
)
(
β
µ
ω
β
ω
Slip
F
dt
V
V
Slip
lookup
v
v
v
=
=
−
=
∫
)
(
Fs
R
T
J
mg
Fs
×
−
=
⋅
=
ω
µ
&
begin
T == R * F ;
V == omg * R ;
if
(vv'dot <
0.0
)
use
slip_rate == (vv-ww)/vv ;
else
slip_rate == (ww-vv)/ww ;
end use
;
beta == omg'integ ;
mur == lookup_SideFC(slip_rate,
abs
(beta)) ;
Fs == mur * mass *
9.8
* sign(beta);
J * omg'dot == (T- Fs*R) ;
end architecture
beh ;
Slip rate
• VHDL-AMS model expresses definitional equations directly.
Friction Coeff.
Equations
Translation <> Rotation
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
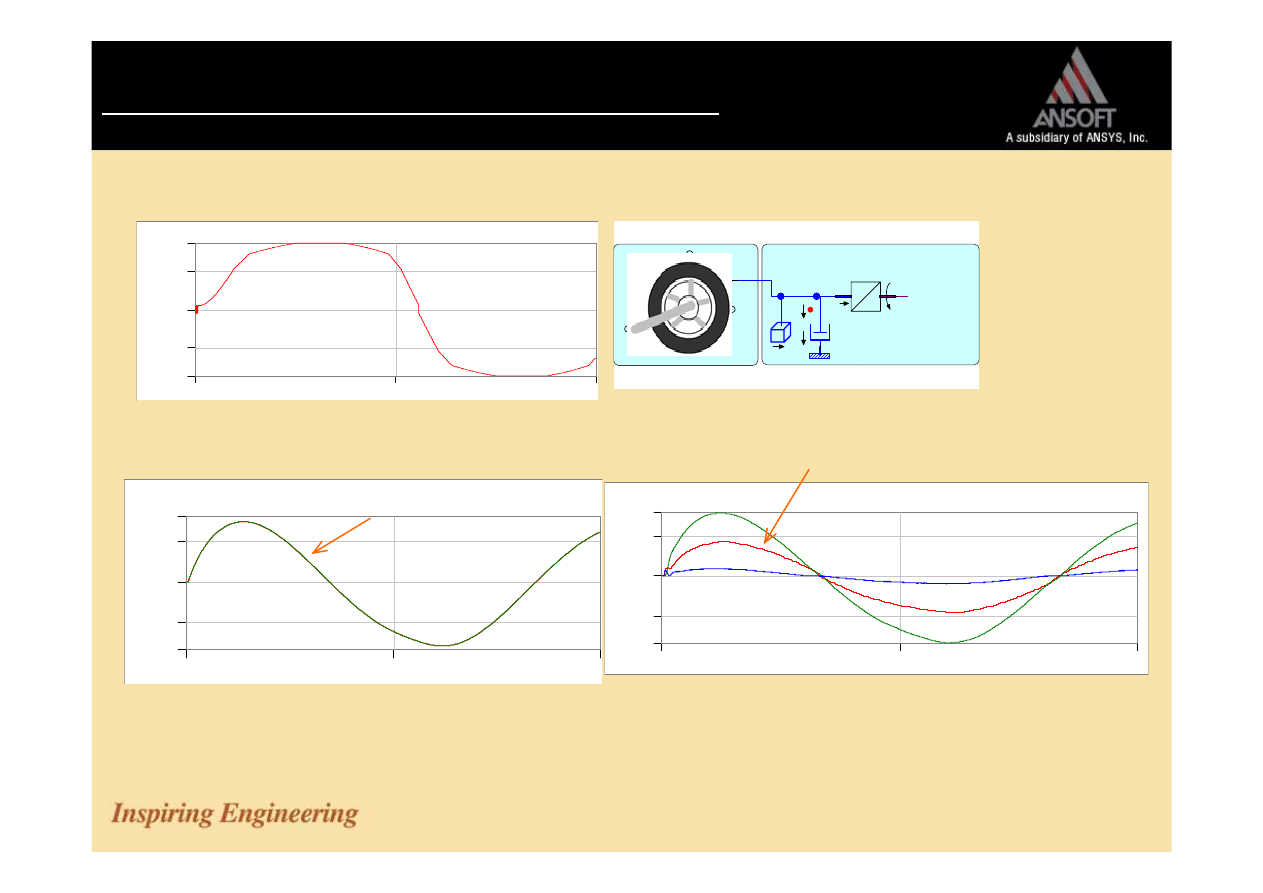
Nonlinear side force model
-4.20
4.00
0
0
1.00
500.00m
TBar.TORQUE [Nm]
SPRING_ROTB2.TORQUE [Nm]
-4.20
4.00
0
0
1.00
500.00m
トーションバー・トルク
TBar.TORQUE [Nm]
SPRING_ROTB2.TORQUE [Nm]
Motor.mi
-4.20
4.00
0
0
1.00
500.00m
トーションバー・トルク
TBar.TORQUE [Nm]
SPRING_ROTB2.TORQUE [Nm]
Motor.mi
TR1
ROT2
TSF
tra
Wheel_dynamics
-35.00
34.80
-20.00
0
20.00
0
1.00
500.00m
タイヤ横力 [kgf]
Steering torque = side force torque
Steering torque reduces as 1/2
• Nonlinear side force mapping.
• Confirm reducing steering force by assist motor.
w/o Power Assist
with Assist
Side force of Tire [N]
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
System Simulation
CONST
TRef
TBarAMS.m
TR1
ROT2
TSF
ROT1
ROT2
TSF
ROT
ROT_V
ROT
ROT_V
T
FM_ROT1
G(s)
ハンドル
操舵量
トーションバー
インタミ
ラック・ピニオン
反力
ピニオン
Φ
Φ
+
GAIN
1/2
AssistGain
W
+
WM_T
W
W
+
WM1
shaft
dcn
dcp
M
INV
Ave
~
Motor
tra
Tire
Y
t
GAIN
DATAPAIRS1
Battery
-
+
fp
fm
np
nm
SYM
PI
100 %
1
1
2
MRV
ω
ω
+
Pulley_ratio
Engine
VM_Eng
ECU
DCp
Fuel_Calc
Name
Value
Fuel_Calc.fc
9.7746m
DCp
Energy Balanced Model
Mechanics
Power supply
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
Components
•
Motor + Inverter
– Energy balanced model written by VHDL-AMS.
•
Power sources
– Battery : Automotive Library (Lead Acid battery)
– Alternator : Automotive Library (Averaged Model)
– Engine : Torque source (Throttle controlled torque source with
Torque-RPM lookup table)
– ECU : Analog PI control ( to keep RPM as idle )
MRV
T
X Y
Trq_per_ro
+
ω
+
AxWM
10
ThrPct
DAMP_ROT1
INPUT
Power
Motor Power OUT
Motor Losses
Inverter Losses
Engine model
RPM vs. Torque
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
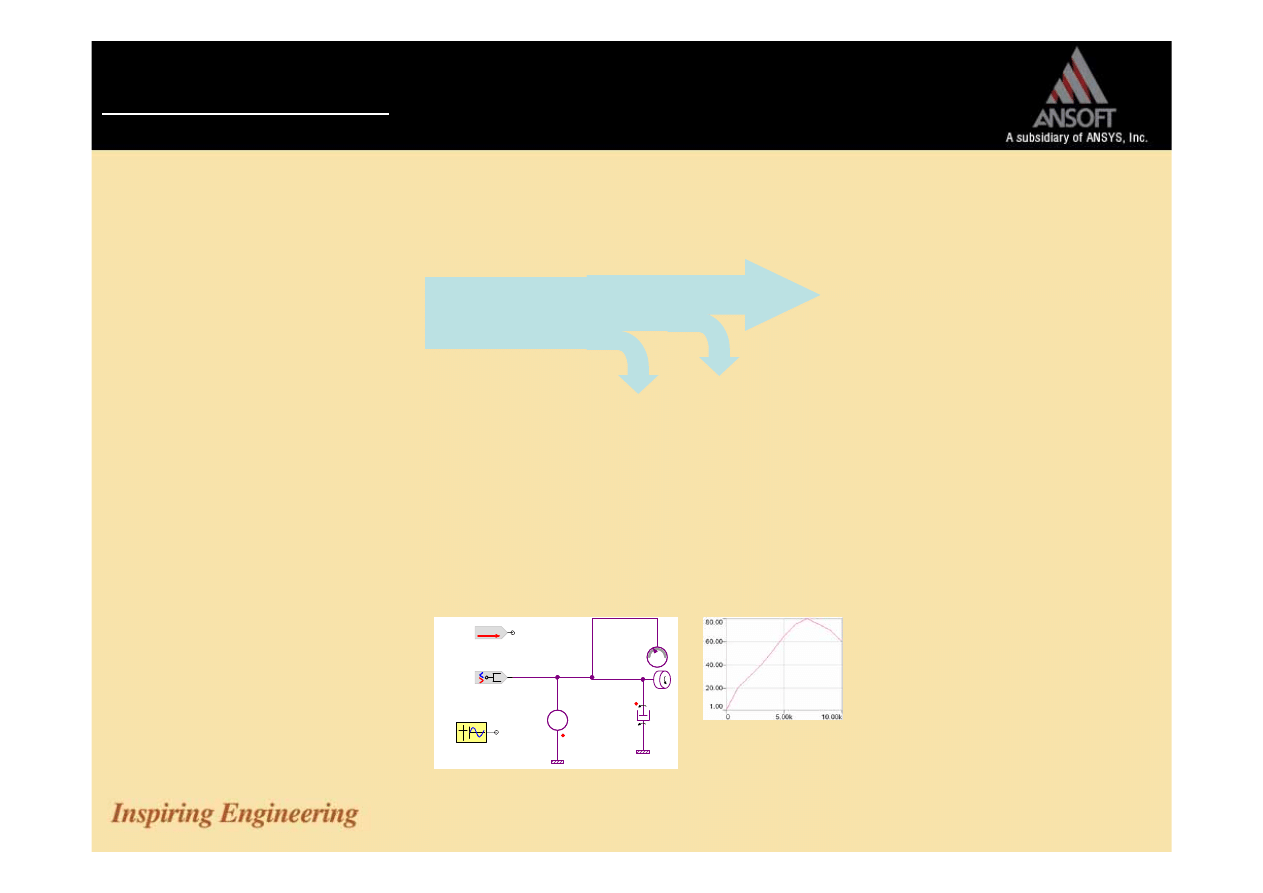
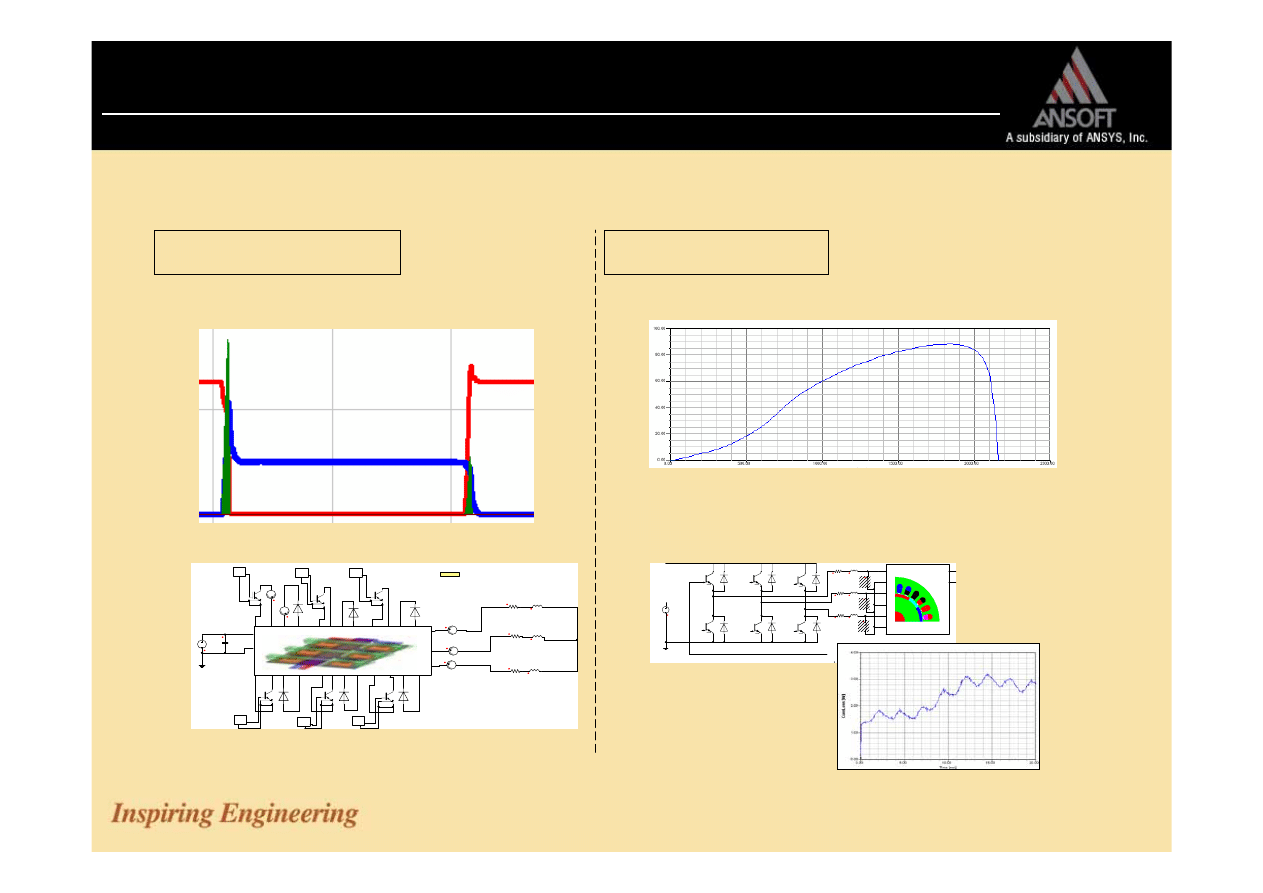
High Accuracy Estimation of Efficiency
for Inverter Losses
for Motor Losses
• Device Level IGBT and Diodes
• Easy estimation by
RMxprt
Ic
Vce
Loss:ON
Loss:Off
200
RA
LA
Lcoil
Rcoil
RC
Rcoil
RB
Rcoil
A
IA
A
IB
A
IC
ICA:
Rcoil := 178m
LB
Lcoil
LC
Lcoil
Lcoil :=2.46m
Pp := 4
Turns := 9
Pars := 2
500u
200
E
G
E
G
E G
E
G
E
G
E G
A
A
AMuIfw
AMuIC
WiHE
WdHA
WiHC
WdHC
ViHC
VdHC
UiHC
UdHC
ViHE
VdHA
UiHE
UdHA
w
VccP
V
u
VccN
WiLC
WdLC
ViLC
VdLC
UiLC
UdLC
WiLE
WdLA
ViLE
VdLA
UiLE
UdLA
Sheet7
• Parasitic LCR with
Q3D
• Core Loss from
Maxwell 2D/3D
Speed
Efficiency
FEA
sourceA1
sourceA2
sourceB1
sourceB2
sourceC1
sourceC2
Magnet01
Magnet02
Q1
Q2
Q3
Q5
Q4
Q6
400 V
RA Ohm
LL H
LDUM H
Core Loss vs. time
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
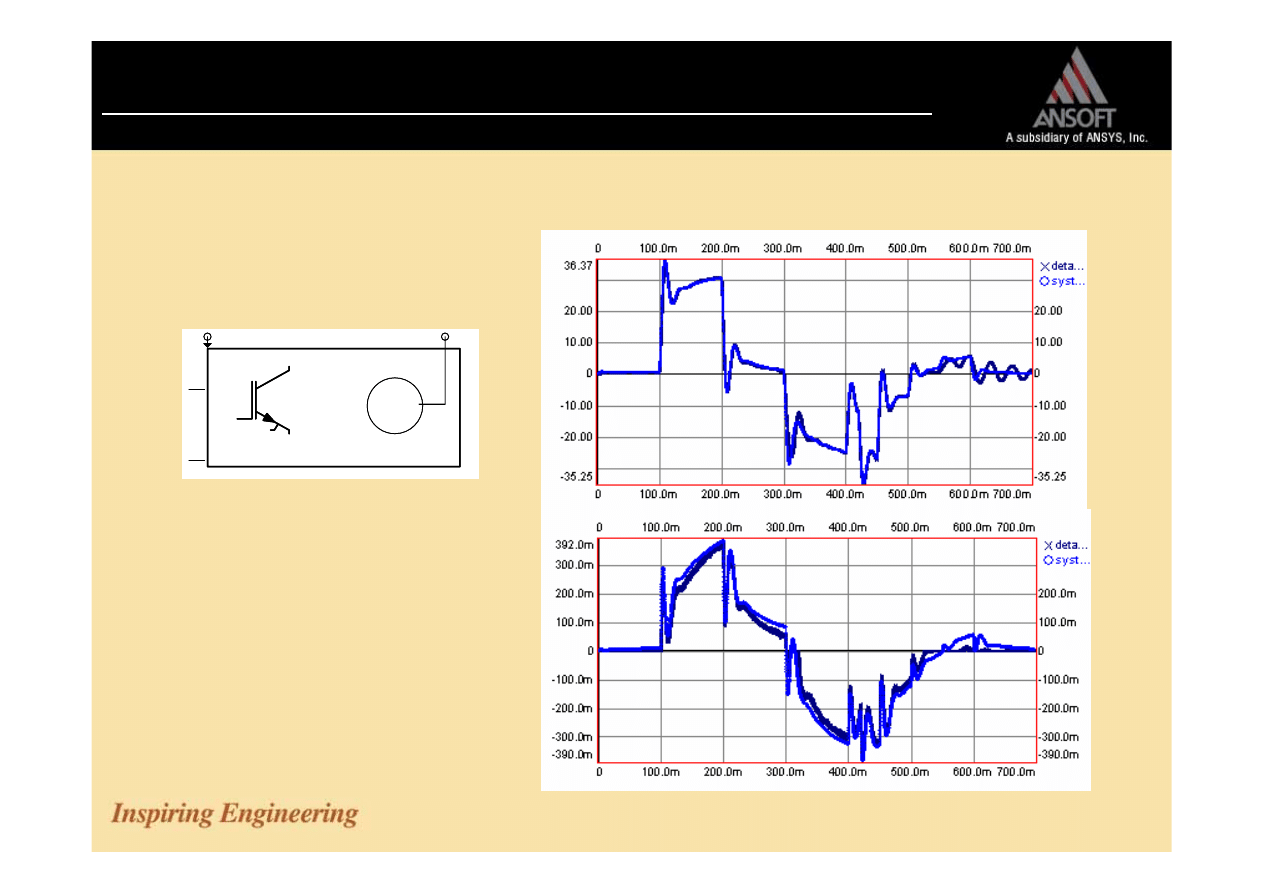
Energy Balanced model verification.
Motor Rotation Speed [RPM]
Motor Torque [Nm]
shaft
dcn
dcp
shaft
dcn
dcp
M
INV
Ave
~
Input :
Reference Torque
Equation
ω
η
η
⋅
=
⋅
⋅
T
I
V
inv
motor
T
T
J
ref
+
=
ω
&
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
Simulation result : Battery Voltage
wEPS
woEPS
0
0
180.0
180.0
25.0
25.0
50.0
50.0
75.0
75.0
100.0
100.0
125.0
125.0
150.0
150.0
2.500
12.500
3.100
2.600
12.600
2.700
12.700
2.800
12.800
2.900
12.900
3.000
13.000
(1)
(2)
(1) : t= 30 : start EPS control
(2) : t=150 : end EPS control
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
Simulation result : Engine Speed
wEPS
woEPS
0
0
180.0
180.0
25.0
25.0
50.0
50.0
75.0
75.0
100.0
100.0
125.0
125.0
150.0
150.0
0
0
700.0
100.0
100.0
200.0
200.0
300.0
300.0
400.0
400.0
500.0
500.0
600.0
wEPS
wo...
60.00
60.00
70.00
70.00
62.50
62.50
65.00
65.00
67.50
67.50
625.0
625.0
650.0
630.0
630.0
635.0
635.0
640.0
640.0
645.0
(1)
(2)
(1) : t= 30 : start EPS control
(2) : t=150 : end EPS control
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
Fuel Consumption
wEPS
woEPS
0
0
180.0
180.0
25.0
25.0
50.0
50.0
75.0
75.0
100.0
100.0
125.0
125.0
150.0
150.0
0
0
700.0
100.0
100.0
200.0
200.0
300.0
300.0
400.0
400.0
500.0
500.0
600.0
MRV
ω
+
Engine
VM Eng
ECU
Fuel Calc
• 4 cycle engine
• Displacement : 1800[cc]
• ideal Air-Fuel ratio : 14.7
• Specific gravity : C
7.5
H
13.5
Engine rotational speed
Total Fuel consumption @2.5[min]
]
[
l
m
With EPS
26.8
WO EPS
26.1
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
Summary
• The construction method of the mechanical load model by
using SIMPLORER.
• By using VHDL-AMS, modeling with high degree of
freedom or more was able to be made easily.
• In addition, it introduced the continuousness to the system
simulation of power consumption and components
simulation.
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
Conclusions
•
SIMPLORER can be as a communications tool that the designer of an
electric equipment and the designer of the regulating system guess the
function from the viewpoint of power consumption.
•
The equipment designer can optimize it by sharing the model under a more
concrete environment.
•
For a system designer, over-specked apparatus is presumed and the whole
cost can be reduced.
•
The model construction in standard language VHDL-AMS has a high ability
for such a demand, and the importance increases.
自動車工学入門 :野崎博路 著:山海堂 ISBN 4-381-08855-7
自動車工学 –基礎- :: (社)自動車技術会 ISBN 4-915219-30-5
車両システムのダイナミクスと制御:(社)日本機会学会:養賢堂: ISBN 4-8425-9901-4
電動機制御工学 〜可変速ドライブの基礎〜:松瀬貢規 著:電気学会/オーム社 ISBN 978-4-88686-255-6
© 2008 Ansoft, LLC All rights reserved.
Ansoft, LLC Proprietary
• Thank you
Wyszukiwarka
Podobne podstrony:
Modeling and Control of an Electric Arc Furnace
integration and radiality measuring the extent of an individuals connectedness and reachability in a
[Engineering] Electrical Power and Energy Systems 1999 21 Dynamics Of Diesel And Wind Turbine Gene
(WinD Power) Dynamic Modeling of Ge 1 5 And 3 6 Wind Turbine Generator {}[2003}
MODELING OF THE ACOUSTO ELECTROMAGNETIC METHOD FOR IONOSPHERE MONITORING EP 32(0275)
Home Power Magazine Issue 109 Extract pg22 Making Sense of Solar Electricity Costs
Whittaker E T On an Expression of the Electromagnetic Field due to Electrons by means of two Scalar
Haisch Update on an Electromagnetic Basis for Inertia, Gravitation, Principle of Equivalence, Spin
US Patent 511,560 System Of Electrical Power Transmission
US Patent 405,859 Method Of Electrical Power Transmission
Modeling of Polymer Processing and Properties
Pancharatnam A Study on the Computer Aided Acoustic Analysis of an Auditorium (CATT)
Hydrodynamic Modeling Of Sailing Yachts(1)
Sinners in the Hands of an Angry GodSummary
POWER STEERING
więcej podobnych podstron