
Sterowniki programowalne PLC
1
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
PRACOWNIA URZĄDZEŃ
MECHATRONICZNYCH
Sterowniki programowalne PLC
1. Wprowadzenie do sterowników PLC
2. Sterownik Siemens SIMATIC S7-200
3. Podstawy programowania sterowników PLC
4. Przykłady prostych aplikacji
5. Programowanie sterowników logicznych w STEP7 MicroWin
Sterowniki programowalne PLC
2
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
1. Wprowadzenie do sterowników PLC
Programowalne sterowniki logiczne (PLC, ang. Programmable Logic Controllers),
nazywane także sterownikami programowalnymi, należą do szeroko rozumianej rodziny
komputerów.
Wykorzystywane są głównie w
zastosowaniach przemysłowych.
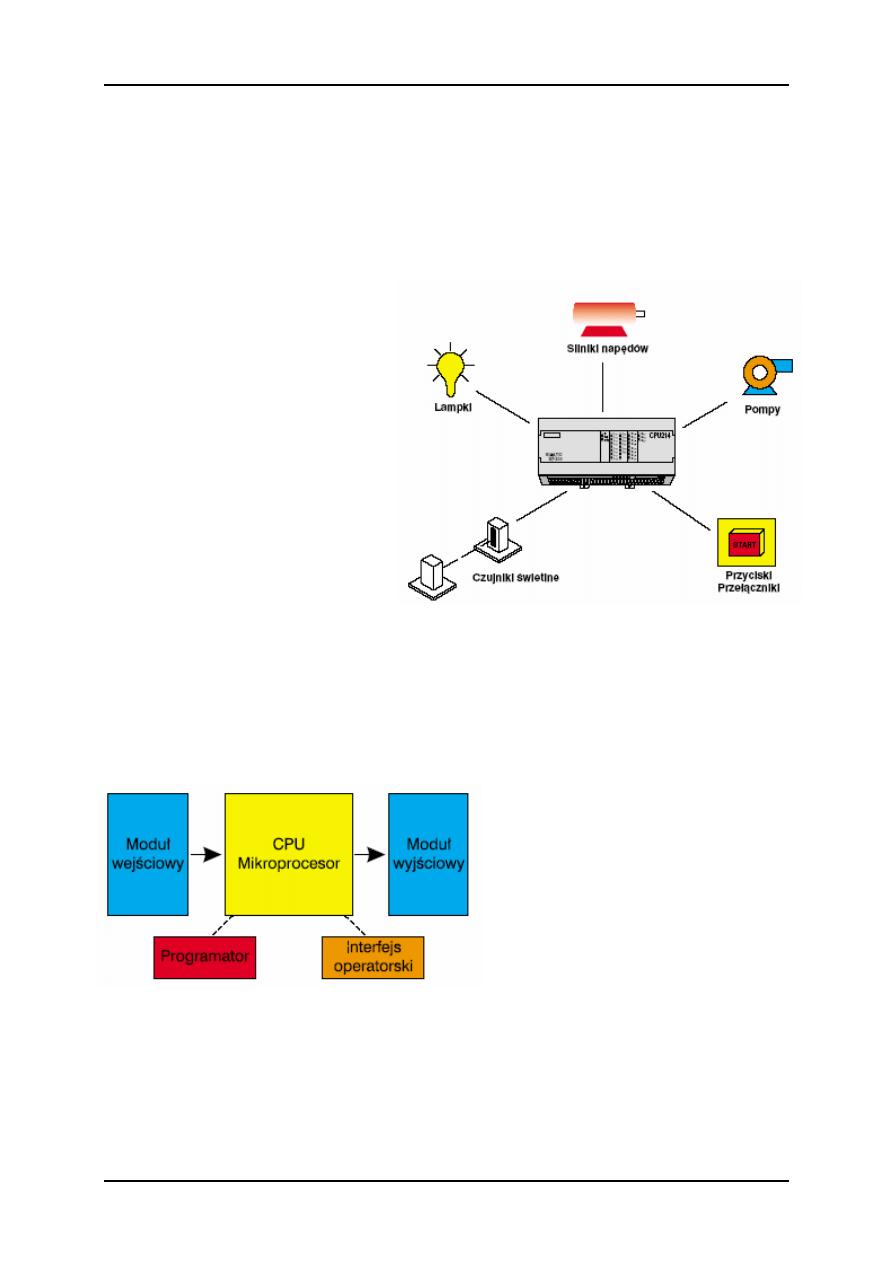
Praca PLC polega na monitorowaniu
wejść analogowych i cyfrowych,
podejmowaniu decyzji w oparciu o
program (algorytm działania)
użytkownika oraz odpowiednim
sterowaniu wyjściami.
Zasada działania PLC
Sterowniki PLC zbudowane są z
modułów wejściowych, jednostki
centralnej (CPU) oraz modułów
wyjściowych. Wejścia PLC akceptują
różne sygnały wejściowe, cyfrowe lub analogowe, pochodzące z zewnętrznych urządzeń
(czujników), przetwarzane następnie do postaci sygnałów logicznych, które stają się
zrozumiałe dla CPU.
Jednostka CPU podejmuje decyzje i wykonuje funkcje sterowania bazując
na instrukcjach
programowych zawartych w pamięci. Moduły wyjściowe przetwarzają funkcje sterowania z
CPU do takiej postaci sygnałów (cyfrowych lub analogowych), jakich wymaga aplikacja.
Instrukcje programowe określają, co
powinien wykonać PLC przy
określonym stanie wejść i w danej
sytuacji. Dodatkowy interfejs
operatorski (pulpit sterowniczy)
umożliwia wyświetlanie informacji o
realizowanym procesie sterowania i
wprowadzanie nowych parametrów
kontrolnych.
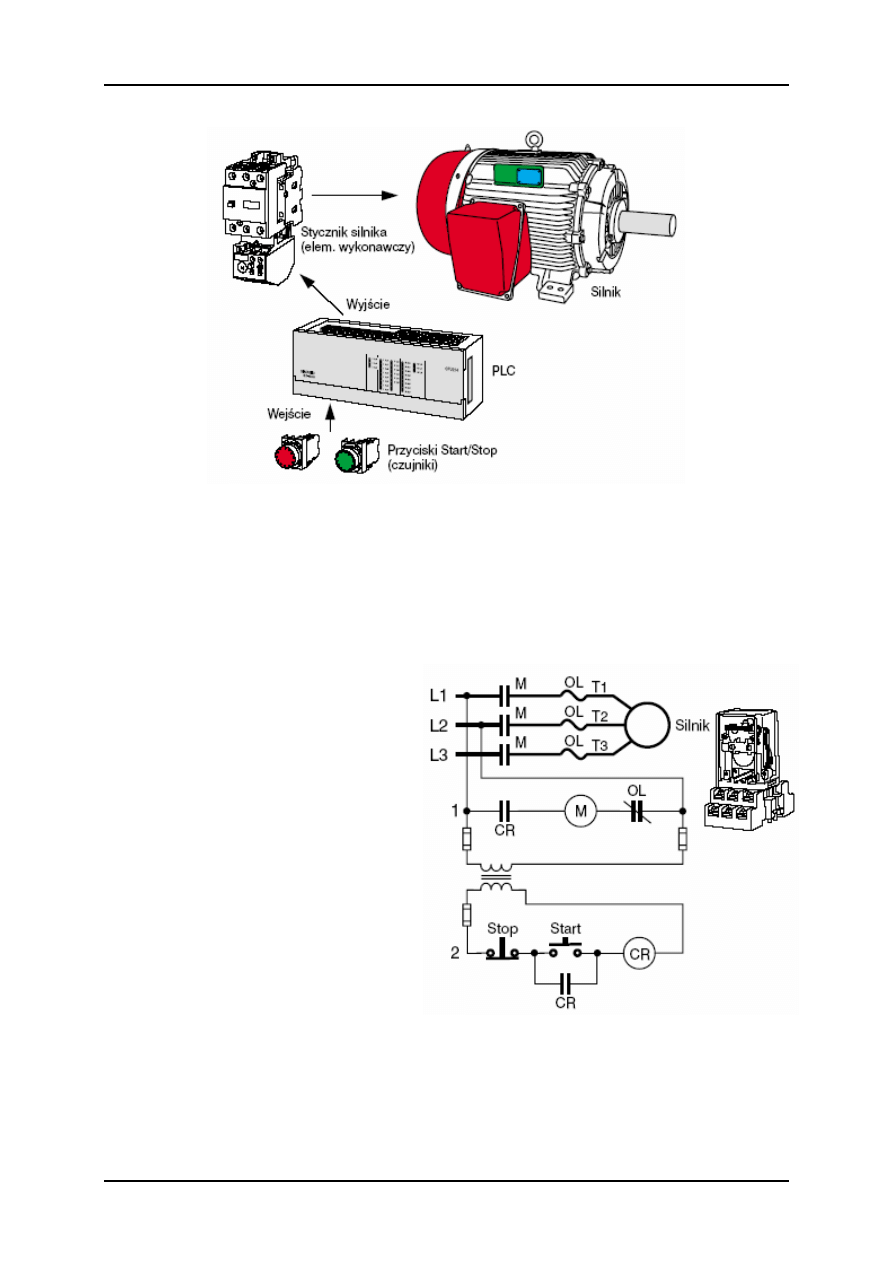
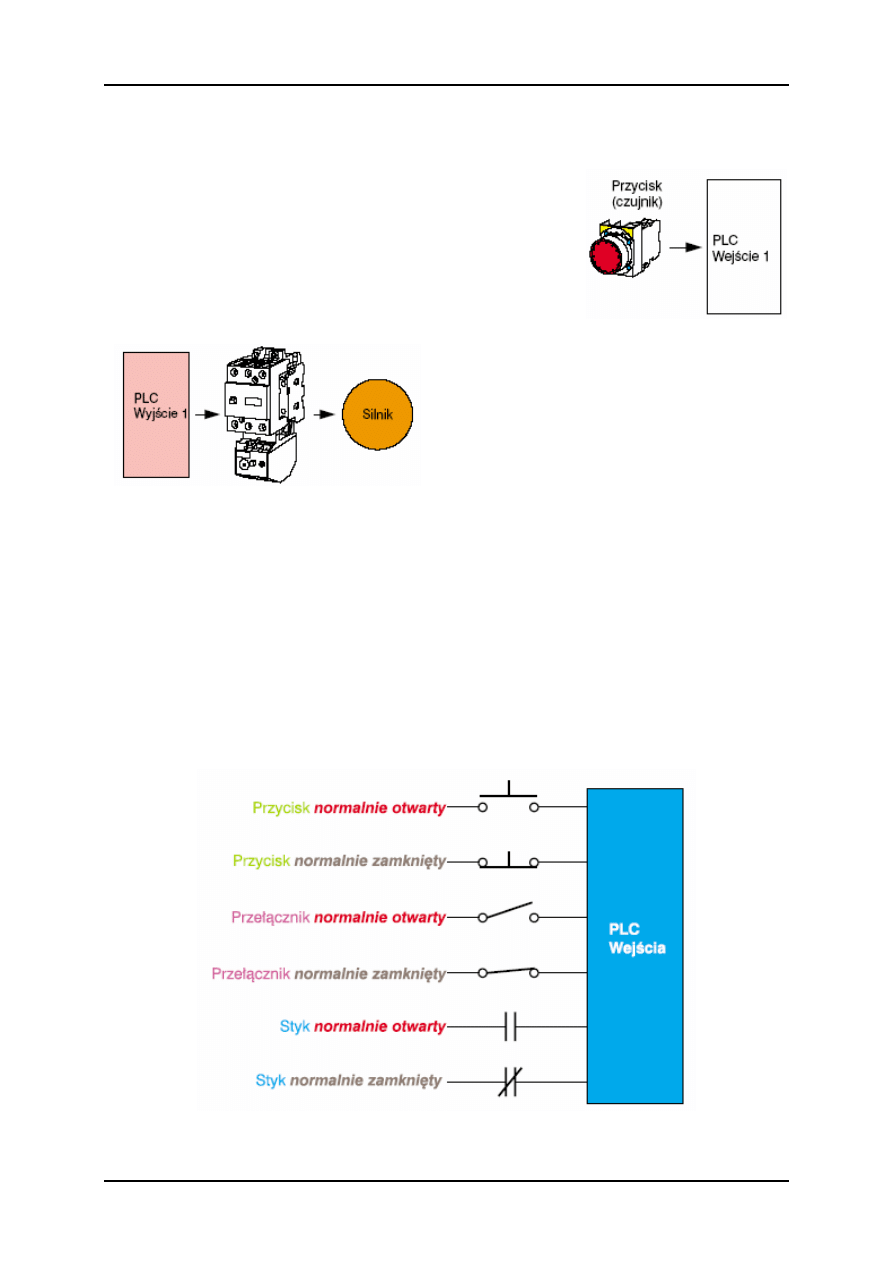
W prezentowanym na rysunku poniżej przykładzie, przyciski (czujniki) podłączone do wejść
PLC mogą być użyte do uruchomienia lub zatrzymania silnika dołączonego do PLC poprzez
stycznik silnika, który spełnia rolę urządzenia wykonawczego.
Sterowniki programowalne PLC
3
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
Sterowanie konwencjonalne
Przed pojawieniem się PLC wiele z zadań kontrolnych było rozwiązywanych przez łączone
ze sobą styczniki lub przekaźniki. Taki sposób sterowania nazywany jest często sterowaniem
konwencjonalnym. Zasada pracy konwencjonalnego układu sterowania jest określona przez
trwałe połączenie aparatury stycznikowo przekaźnikowej i elementów obiektowych.
Okablowanie układu jednoznacznie i
trwale określa sposób jego
funkcjonowania. Jakiekolwiek zmiany
lub rozbudowa układu sterowania
wymagają uzupełnienia aparatury
kontrolnej i ponownego okablowywania.
Przykładowy układ sterowania
konwencjonalnego przedstawiono na
rysunku obok.
Sterowanie z PLC
Takie same, a także bardziej
skomplikowane zadania mogą być
wykonane za pomocą PLC.
„Okablowanie połączeń logicznych”
pomiędzy urządzeniami i stykami
przekaźników wykonywane jest w
programie zapisanym w pamięci PLC. Na zewnątrz wymagane jest jedynie proste podłączenie
aparatury obiektowej do wejść i wyjść sterownika. Opracowanie aplikacji i usuwanie błędów
jest znacznie łatwiejsze niż w sterowaniu konwencjonalnym. Znacznie łatwiej tworzy się i
modyfikuje program w PLC niż zmienia okablowanie układu.

Sterowniki programowalne PLC
4
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
Sterowniki PLC firmy Siemens
Firma Siemens produkuje kilka odmian sterowników PLC rodziny SIMATIC S7. Są to:
• S7-200,
• S7-300,
• S7-400.
Sterownik S7-200 jest określany mianem mikro-PLC, a to ze względu na swoje niewielkie
wymiary. Jednostka centralna sterownika S7-200 zbudowana jest w postaci bloku, ze
zintegrowanym zasilaczem i wejściami/wyjściami obiektowymi. Występują także wersje bez
wbudowanego zasilacza. S7-200 może być używany w mniejszych, samodzielnych
aplikacjach, takich jak np.: podnośniki, myjnie samochodowe lub mieszarki. Może być także
stosowany w bardziej kompleksowych aplikacjach przemysłowych, takich jak linie
butelkowania i pakowania.
Sterowniki PLC typu S7-300 i S7-400 są używane w bardziej skomplikowanych
zastosowaniach, ponieważ obsługują znacznie większą liczbę wejść i wyjść obiektowych.
Oba sterowniki wykonano w technice modułowej, dzięki czemu można je w prosty sposób
rozbudowywać. Zasilacz oraz moduły wejść/wyjść stanowią oddzielne bloki podłączane do
CPU. Wybór pomiędzy S7-300 lub S7-400 zależy od stopnia złożoności procesu sterowania i
możliwości przyszłej rozbudowy.
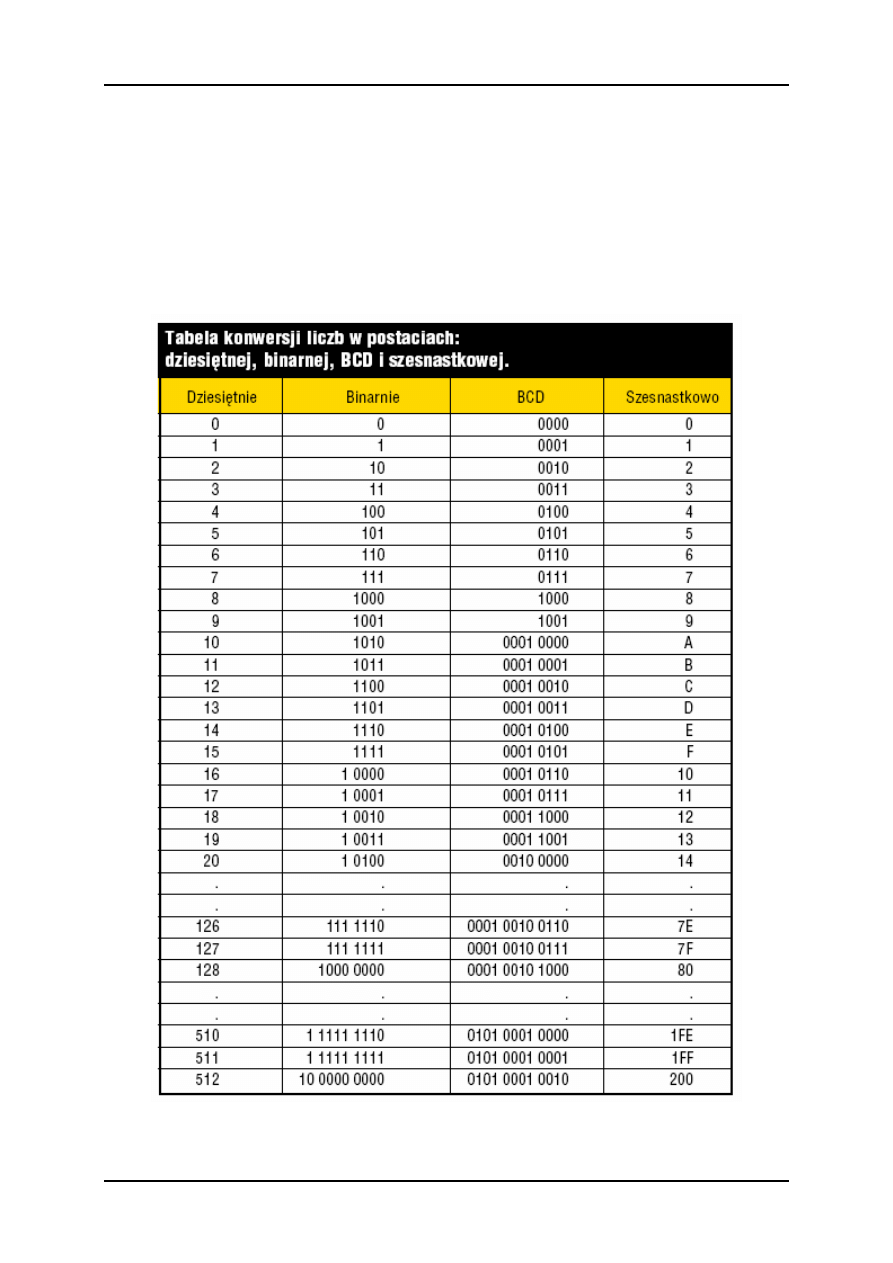
Systemy liczbowe
Sterowniki programowalne są komputerami, które przechowują informacje w postaci dwóch
stanów logicznych: 1 lub 0, nazywanych cyframi binarnymi (bitami). Cyfry binarne są
używane indywidualnie lub wykorzystywane do przedstawiania wartości numerycznych
(liczbowych). Sterowniki wykorzystują wiele systemów liczbowych. Wszystkie systemy
liczbowe mają te same trzy cechy: cyfry, podstawę i wagę.
System dziesiętny, który jest powszechnie używany w życiu codziennym, posiada następujące
cechy charakterystyczne:
• Dziesięć cyfr: 0, 1, 2, 3, 4, 5, 6, 7, 8, 9
• Podstawę: 10
• Wagi: 1, 10, 100, 1000...
System binarny wykorzystywany jest przez sterowniki programowalne. System binarny
posiada następujące cechy charakterystyczne:
• Dwie cyfry: 0, 1
• Podstawę: 2
• Wagi: 1, 2, 4, 8, 16...
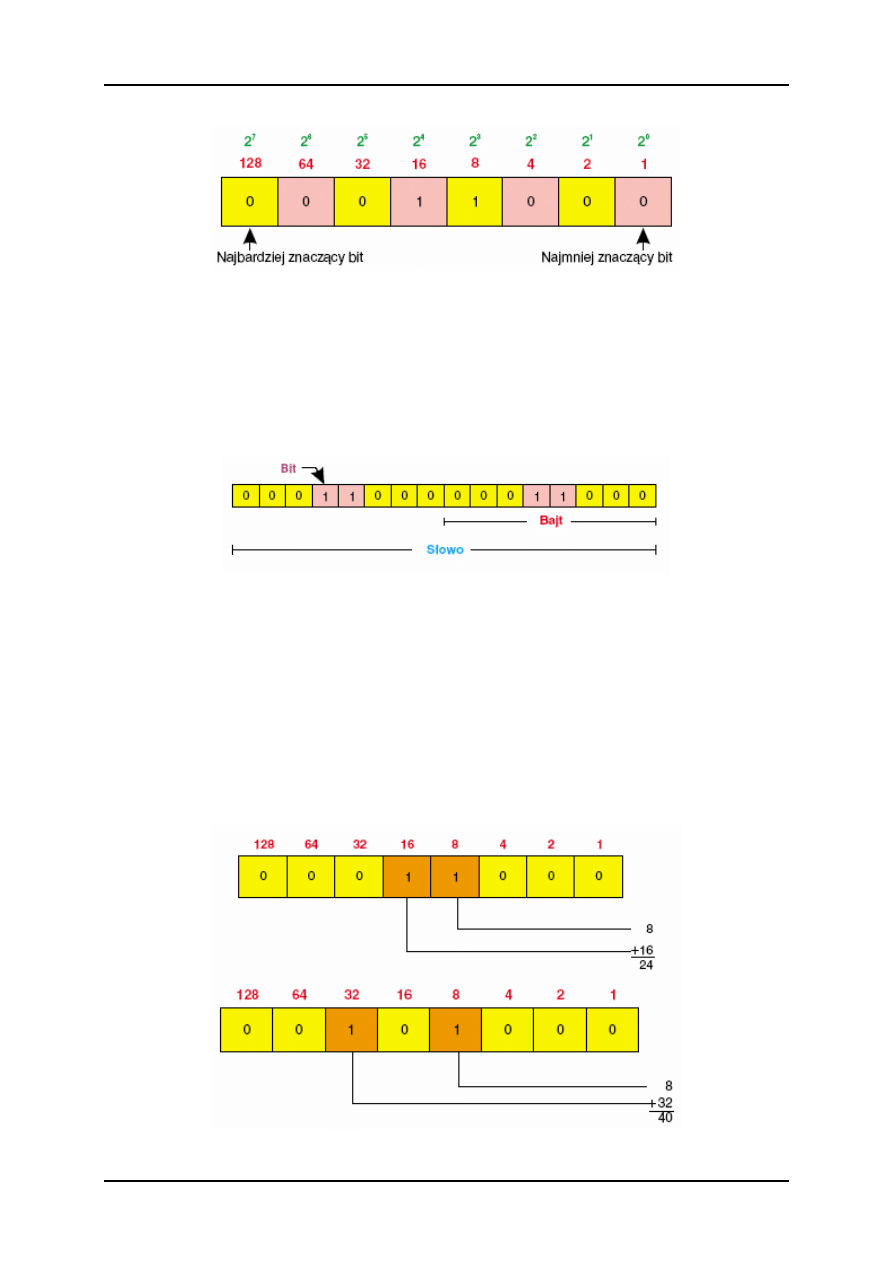
W systemie binarnym jedynki i zera zajmują w zapisie określone pozycje. Każdej pozycji
odpowiada jej waga. Pierwsza pozycja z prawej posiada wagę 2
0
. Jest ona odpowiednikiem
dziesiętnych jedności. Bit z tej pozycji jest nazywany najmniej znaczącym bitem. Waga
binarna jest podwajana z każdą kolejną pozycją. Następna pozycja (druga z prawej) posiada
wagę 2
1
, która odpowiada dziesiętnej dwójce.
Sterowniki programowalne PLC
5
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
Wartość dziesiętna jest podwajana na każdej kolejnej pozycji. Liczba na pozycji najdalej po
lewej stronie jest nazywana najbardziej znaczącym bitem. W naszym przykładzie, najbardziej
znaczący bit posiada wagę binarną 2
7
. Odpowiada to liczbie dziesiętnej 128.
Każda cyfra liczby binarnej jest bitem. Osiem bitów tworzy bajt. Dwa bajty lub 16 bitów
tworzą jedno słowo.
Poniższe kroki mogą być wykorzystane do znalezienia dziesiętnego odpowiednika liczby
zapisanej w kodzie binarnym:
• Rozpocznij od prawej strony do lewej (od najmniej znaczącego do najbardziej
znaczącego bitu);
• Zapisz pod spodem reprezentację dziesiętną wszystkich pozycji zawierających
jedynki;
• Dodaj wartości w kolumnie.
PRZYKŁAD
Sterowniki programowalne PLC
6
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
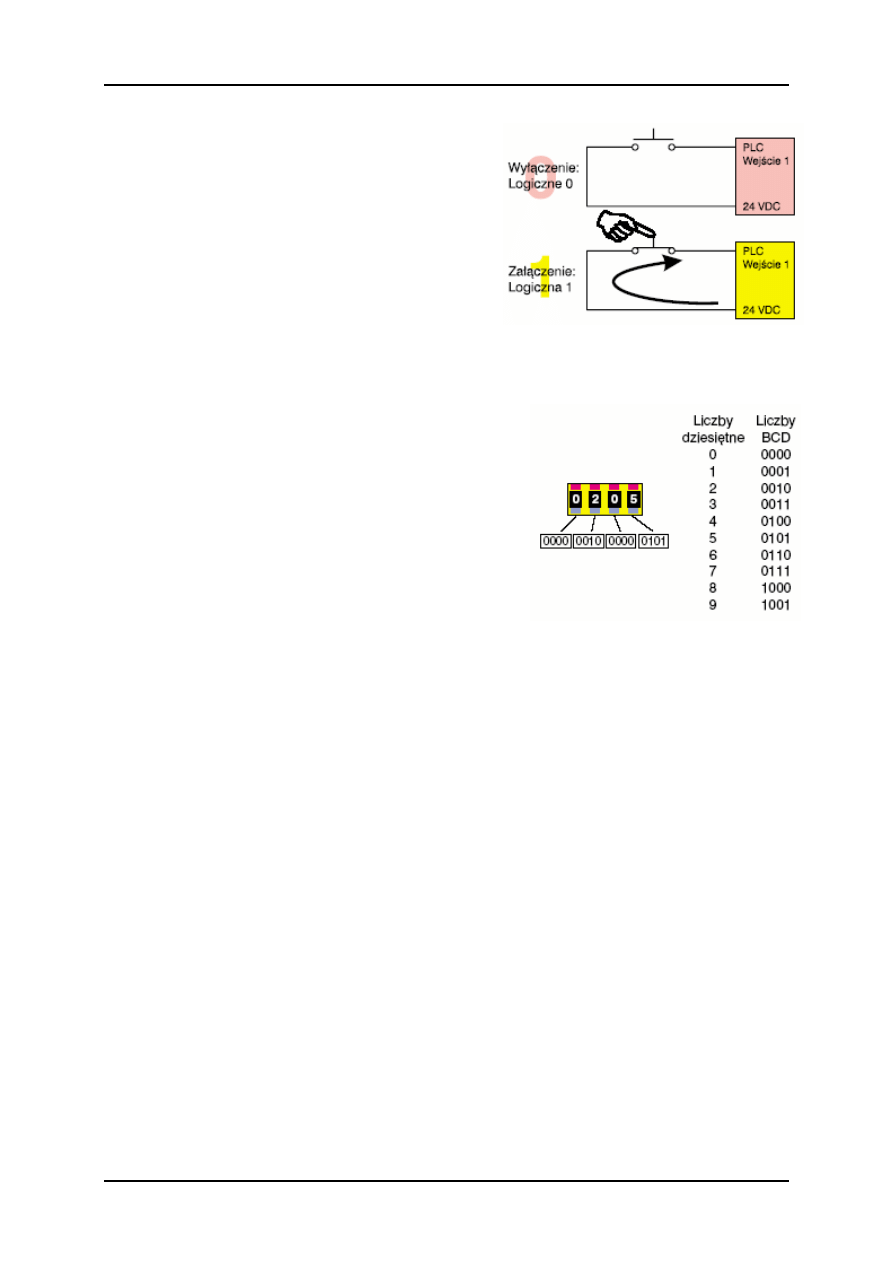
Sterowniki programowalne mogą rozróżnić tylko
dwa sygnały: włączone lub wyłączone. Binarny
system liczbowy jest systemem, w którym
występują tylko dwie cyfry: 1 i 0. Binarna 1
wskazuje, że sygnał jest obecny lub przełącznik jest
załączony. Binarne 0 wskazuje, że sygnał jest
nieobecny lub przełącznik jest wyłączony.
Kod BCD
Binarne kodowanie dziesiętne (BCD) jest systemem liczb dziesiętnych, w którym każda cyfra
reprezentowana jest przez cztery bity liczby binarnej. Kod BCD jest często używany w
urządzeniach wejściowych i wyjściowych sterowników.
Przełącznik obrotowy jest jednym z przykładów
urządzenia wejściowego, które wykorzystuje kod BCD.
Liczby binarne są pogrupowane w czterocyfrowe grupy,
każda grupa reprezentuje liczbę dziesiętną.
Czterocyfrowy przełącznik obrotowy wykorzystuje 16
wejść PLC (4 x 4).
System szesnastkowy
System szesnastkowy jest kolejnym systemem używanym w sterownikach programowalnych.
Posiada on następujące cechy charakterystyczne:
• Szesnaście cyfr: 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, A, B, C, D, E, F
• Podstawę: 16
• Wagi: 1, 16, 256, 4096...
Dla pierwszych dziesięciu cyfr systemu szesnastkowego wykorzystanych jest dziesięć cyfr
systemu dziesiętnego. Dla pozostałych sześciu cyfr wykorzystanych jest pierwszych sześć
liter alfabetu:
A = 10
D = 13
B = 11
E = 14
C = 12
F = 15
System szesnastkowy jest używany w PLC, ponieważ umożliwia czytelne przedstawienie
dużych liczb binarnych w stosunkowo małych przestrzeniach, takich jak ekran komputerowy
lub wyświetlacz programatora. Każda cyfra szesnastkowa reprezentuje kombinację wartości
czterech bitów binarnych. Aby przekształcić liczbę dziesiętną na postać szesnastkową, należy
ją dzielić kolejno przez największą możliwą potęgę podstawy (16). Na przykład, aby
przekształcić dziesiętne „28” do postaci szesnastkowej, należy wykonać następujące
działanie: dziesiętne „28” podzielić przez 16, co daje 1 i resztę 12. Liczbie 12 w zapisie
szesnastkowym odpowiada C. Szesnastkowy odpowiednik dziesiętnej liczby 28 wynosi
wobec tego „1C”.
Sterowniki programowalne PLC
7
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
Wartość dziesiętna liczby szesnastkowej otrzymywana jest przez pomnożenie poszczególnych
cyfr tej liczby przez wagę odpowiednią dla danej cyfry, a następnie zsumowanie tych
iloczynów cząstkowych. W poniższym przykładzie szesnastkowa liczba 2B przekształcana
jest do swojego odpowiednika dziesiętnego, tj. liczby 43.
16
0
= 1
16
1
= 16
2B = 2*16
1
+ 11 = 32 + 11 = 43
B = 11
Sterowniki programowalne PLC
8
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
Czujniki
Czujnik jest elementem, który przekształca parametr
charakteryzujący zjawisko fizyczne na sygnał elektryczny
akceptowany przez PLC. Czujniki dołączane są do wejść PLC.
Przyciski to jeden z przykładów takich czujników. Sygnał
elektryczny wysyłany z przycisku do wejścia PLC wskazuje
stan (otwarty/zamknięty) styków przycisku.
Element wykonawczy
Elementy wykonawcze umożliwiają
zainicjowanie sygnałem elektrycznym
wychodzącym z PLC działanie jakiegoś
urządzenia. Elementy wykonawcze systemu
sterowania są podłączane do wyjść PLC.
Stycznik silnika jest jednym z przykładów
elementu wykonawczego, który może być podłączony do wyjścia PLC. Zależnie od
wyjściowego sygnału PLC, stycznik silnika będzie zarówno uruchamiać, jak i zatrzymywać
silnik.
Wejścia dyskretne
Wejście dyskretne, określane także mianem „wejścia cyfrowego”, może znajdować się w
jednym z dwóch stanów: załączone (ON) lub wyłączone (OFF). Przyciski, przełączniki
dwustanowe, wyłączniki krańcowe oraz czujniki zbliżeniowe to przykłady czujników
dyskretnych, które są podłączane do dyskretnych (cyfrowych) wejść sterowników. W stanie
załączenia (ON) dyskretne wejście odpowiada logicznej jedynce lub stanowi wysokiemu. W
stanie wyłączenia (OFF) dyskretne wejście odpowiada logicznemu zeru lub stanowi
niskiemu.
Sterowniki programowalne PLC
9
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
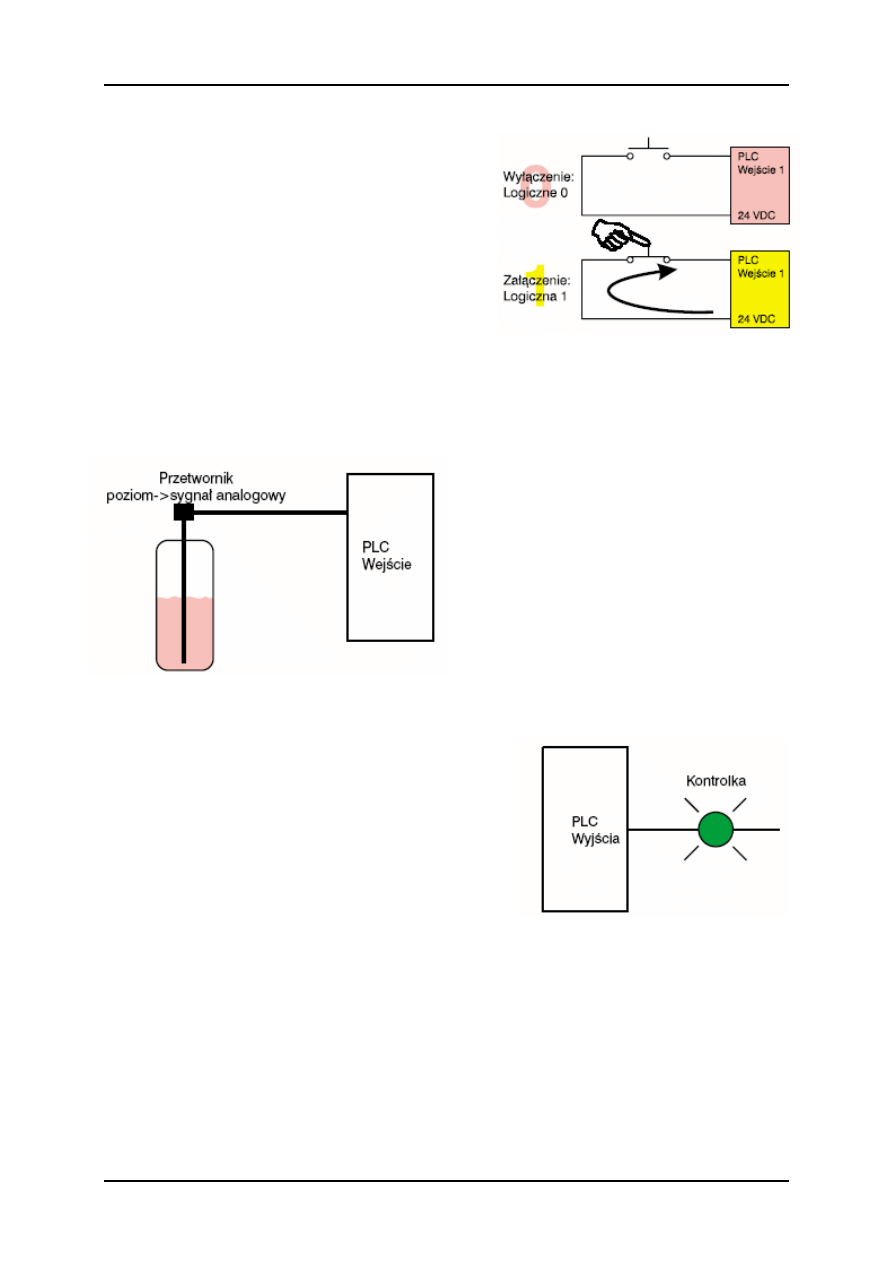
Przycisk normalnie otwarty (NO) został użyty w
przykładzie zilustrowanym rysunkiem obok. Jeden
styk przycisku jest podłączony do pierwszego
wejścia PLC. Drugi styk przycisku jest podłączony
do wewnętrznego zasilacza 24VDC. Wiele
sterowników wymaga oddzielnego zasilacza dla
zasilania wejść. W stanie otwartym na wejściu
PLC nie występuje napięcie. Jest to stan
wyłączenia (OFF). Kiedy przycisk zostaje
wciśnięty, napięcie 24VDC zostaje dołączone do
wejścia PLC. Jest to stan załączenia (ON).
Wejścia analogowe
Wejście analogowe to wejście, do którego podłącza się sygnał ciągły. Typowe wejścia
analogowe różnią się właściwościami, np.:
mogą być przystosowane do pomiaru prądu
(najczęściej spotykane zakresy to 0..20 mA
oraz 4..20 mA) lub napięcia (np. 0..10V). W
przykładzie prezentującym wykorzystanie
takiego wejścia, czujnik poziomu monitoruje
poziom płynu w zbiorniku. Zależnie od
wyników pomiarów wykonanych przez
czujnik poziomu, wartość sygnału
dostarczanego do PLC może zwiększać się
lub zmniejszać, tak jak poziom cieczy w
zbiorniku.
Wyjścia dyskretne
Wyjście dyskretne jest wyjściem, które może być
włączone (ON) lub wyłączone (OFF). Cewki
przekaźników oraz lampki to przykładowe urządzenia
wykonawcze podłączane do wyjść dyskretnych.
Wyjścia dyskretne mogą być również nazywane
wyjściami cyfrowymi. W przykładzie z rysunku obok
lampka kontrolna może być załączana lub wyłączana
sygnałem z wyjścia PLC, do którego jest podłączona.
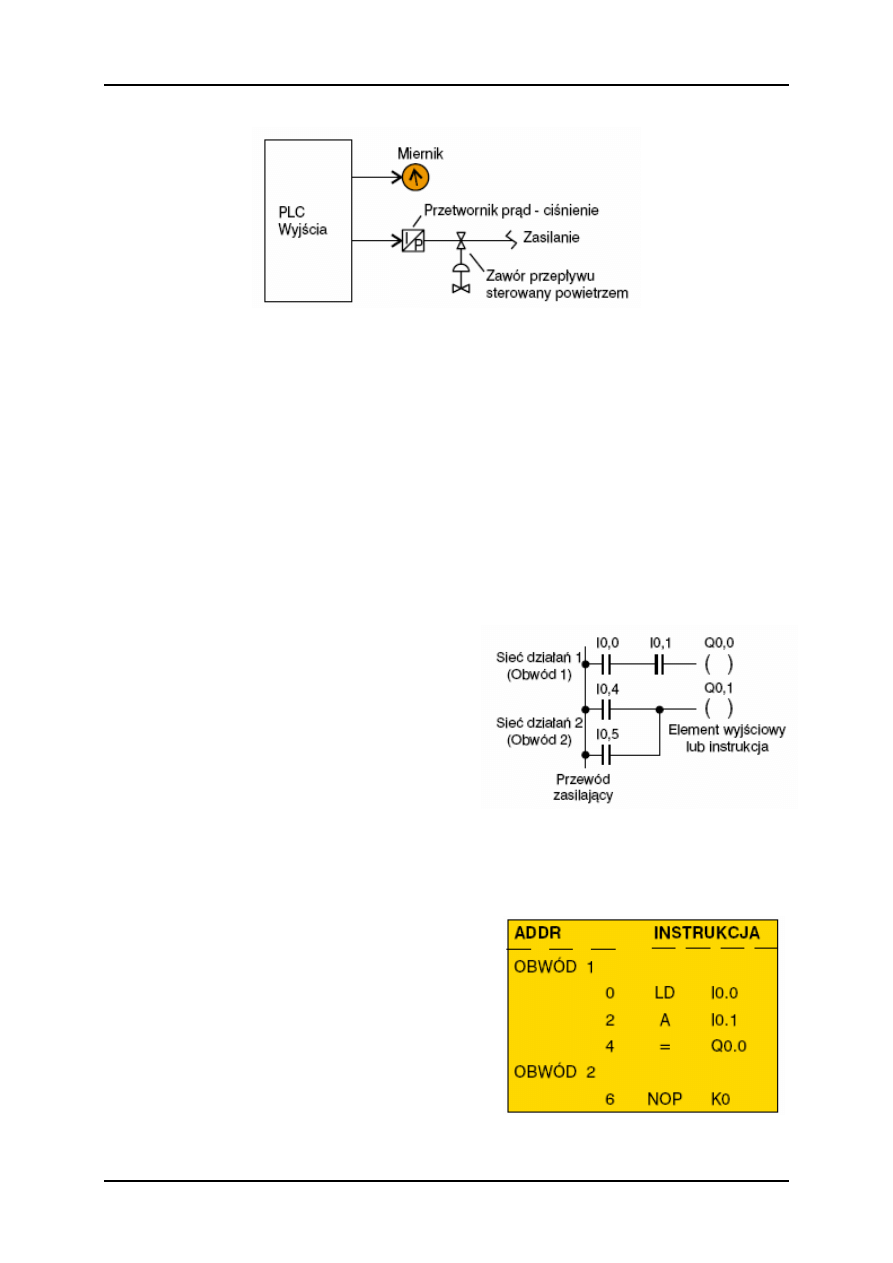
Wyjścia analogowe
Wyjście analogowe jest wyjściem, na którym jest generowany sygnał ciągły w czasie. Na
wyjściu może być wytwarzany, np.: sygnał napięciowy z zakresu 0..10VDC, który steruje
wskaźnikiem analogowym (wychyłowym). Przykładowo, do wyjść analogowych są
dołączane wskaźniki prędkości, ciężaru i temperatury. Sygnał wyjściowy może być również
używany przy bardziej złożonych zastosowaniach, takich jak np.: zamiana prądu na ciśnienie,
które reguluje pneumatycznym zaworem przepływu.
Sterowniki programowalne PLC
10
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
CPU (jednostka centralna)
Jednostka centralna sterownika PLC (CPU) to system mikroprocesorowy, który zawiera
pamięć systemową oraz podejmuje decyzje określające sposób działania sterownika. CPU
monitoruje wejścia i podejmuje decyzje w oparciu o instrukcje zapisane w pamięci programu.
CPU odpowiada za realizację wszystkich procesów sterowania: przełączania, zliczania,
synchronizację i porównanie danych oraz operacje sekwencyjne.
Logika drabinkowa
Logika drabinkowa (LAD) to język używany do programowania PLC. W logice drabinkowej
są wykorzystywane komponenty w postaci schematu liniowego do opisania sterowania.
W schemacie drabinkowym lewa, pionowa linia reprezentuje zasilanie urządzenia lub
obwodów sterowania. Element wyjściowy lub
instrukcja reprezentuje efekt działania obwodu
sterującego. Prawa, pionowa linia, która
przedstawia powrotną linię zasilania na
schemacie sprzętowym sterowania jest zazwyczaj
pomijana na tego typu schematach. Schemat
drabinkowy należy czytać od lewej strony do
prawej i od góry do dołu. Szczeble nazywane są
czasami obwodami lub sieciami. Sieć może
posiadać kilka elementów sterujących, ale tylko
jeden sygnał wyjściowy.
Lista instrukcji (STL)
Instrukcja jest dla PLC rozkazem do
natychmiastowej realizacji. Lista instrukcji (STL)
określa sposób działania sterownika. Porównanie
listy instrukcji, pokazanej na rysunku obok, z
logiką drabinkową, przedstawioną powyżej,
wskazuje na podobną strukturę obydwu opisów.
Działanie, jakie ma być wykonane, jest pokazane
po lewej stronie. Operand (adres), który poddany
ma być działaniu instrukcji (rozkazu), jest
przedstawiony po prawej stronie.
Sterowniki programowalne PLC
11
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
Programowanie
Program składa się z jednej lub kilku instrukcji, które realizują zadanie. Programowanie
sterowników polega na konstruowaniu zestawów prostych instrukcji. W przedstawianym
powyżej przykładzie schematu drabinkowego sygnały I0.0, I0.1 oraz Q0.0 reprezentowały
operandy pierwszych instrukcji. W przykładzie tym, jeśli I0.0 i I0.1 są pobudzone, to wyjście
Q0.0 także zostanie pobudzone. Sygnałami wejściowymi mogą być stany przełączników,
przycisków lub styków. Wejścia I0.4, I0.5 oraz wyjście Q0.1 reprezentują operandy kolejnych
instrukcji. Jeśli jedno z wejść I0.4 lub I0.5 jest pobudzone, to wyjście Q0.1 także zostanie
pobudzone. Cały zestaw instrukcji jest przechowywany w pamięci jednostki centralnej PLC i
nazywany programem.
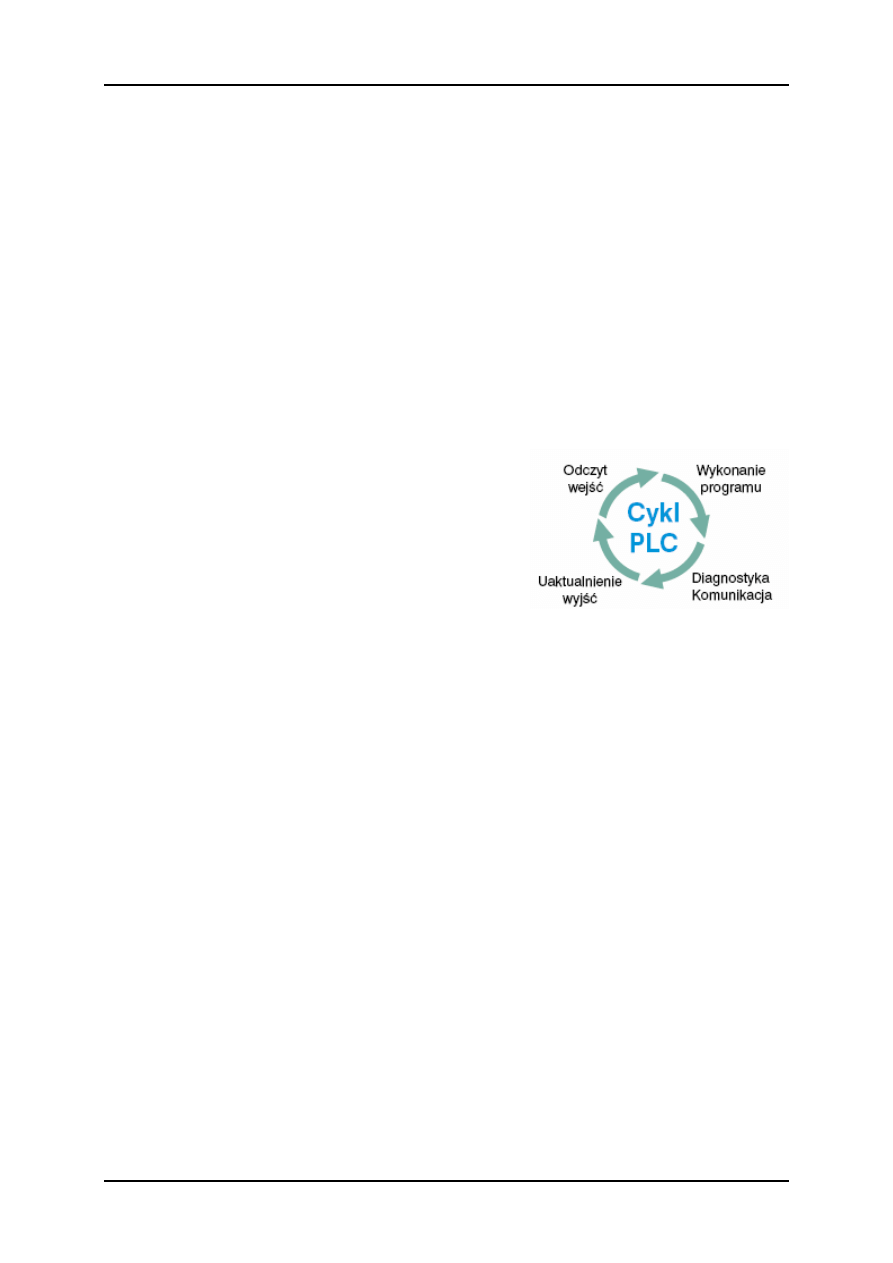
Pętla programowa
Program zawarty w PLC wykonywany jest w pętli jako powtarzający się proces nazywany
skanowaniem. Skanowanie PLC rozpoczyna się w
momencie odczytania przez CPU stanów wejść.
Program aplikacji wykonuje się wykorzystując stany
wejść. Po zakończeniu programu CPU wykonuje
wewnętrzną diagnostykę oraz zadania komunikacyjne.
Obieg pętli programowej kończy się uaktualnieniem
stanów wyjść, a następnie rozpoczyna się od początku.
Czas cyklu zależy od rozmiaru programu, liczby
wejść/wyjść oraz od liczby niezbędnych procesów
komunikacji.
Oprogramowanie, sprzęt i oprogramowanie systemowe
Oprogramowanie jest wykorzystywane przez komputer lub PLC. Zawiera ono instrukcje,
które kierują działaniem sprzętu. Przykładem sprzętu jest m.in. sterownik programowalny,
programator oraz kable połączeniowe.
Oprogramowanie systemowe jest szczególnym oprogramowaniem aplikacyjnym lub
użytkowym zapisanym w pamięci typu EPROM i dostarczane wraz ze sprzętem.
Oprogramowanie systemowe nadaje sterownikowi jego podstawową funkcjonalność.
Podział pamięci
Pamięć S7-200 podzielona jest na trzy obszary: pamięć programu, pamięć danych oraz
pamięć znaczników.
Pamięć programu przechowuje logikę drabinkową (LAD) lub listę instrukcji programowych
(STL). Ten obszar pamięci steruje sposobem wykorzystywania danych i stanów wejść/wyjść.
Instrukcje zapisywane są przy wykorzystaniu programatorów, a następnie ładowane do
pamięci programu sterownika programowalnego.
Pamięć danych wykorzystywana jest jako obszar roboczy oraz zawiera obszary dla obliczeń,
chwilowego przechowywania wyników pośrednich i stałych. Pamięć danych zawiera obszary
dla obsługi liczników czasu, liczników zdarzeń oraz wejść i wyjść analogowych. Dostęp do
przestrzeni danych jest możliwy z poziomu programu sterującego.
Pamięć znaczników przechowuje stany pośrednie obwodów sterowniczych.
Sterowniki programowalne PLC
12
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
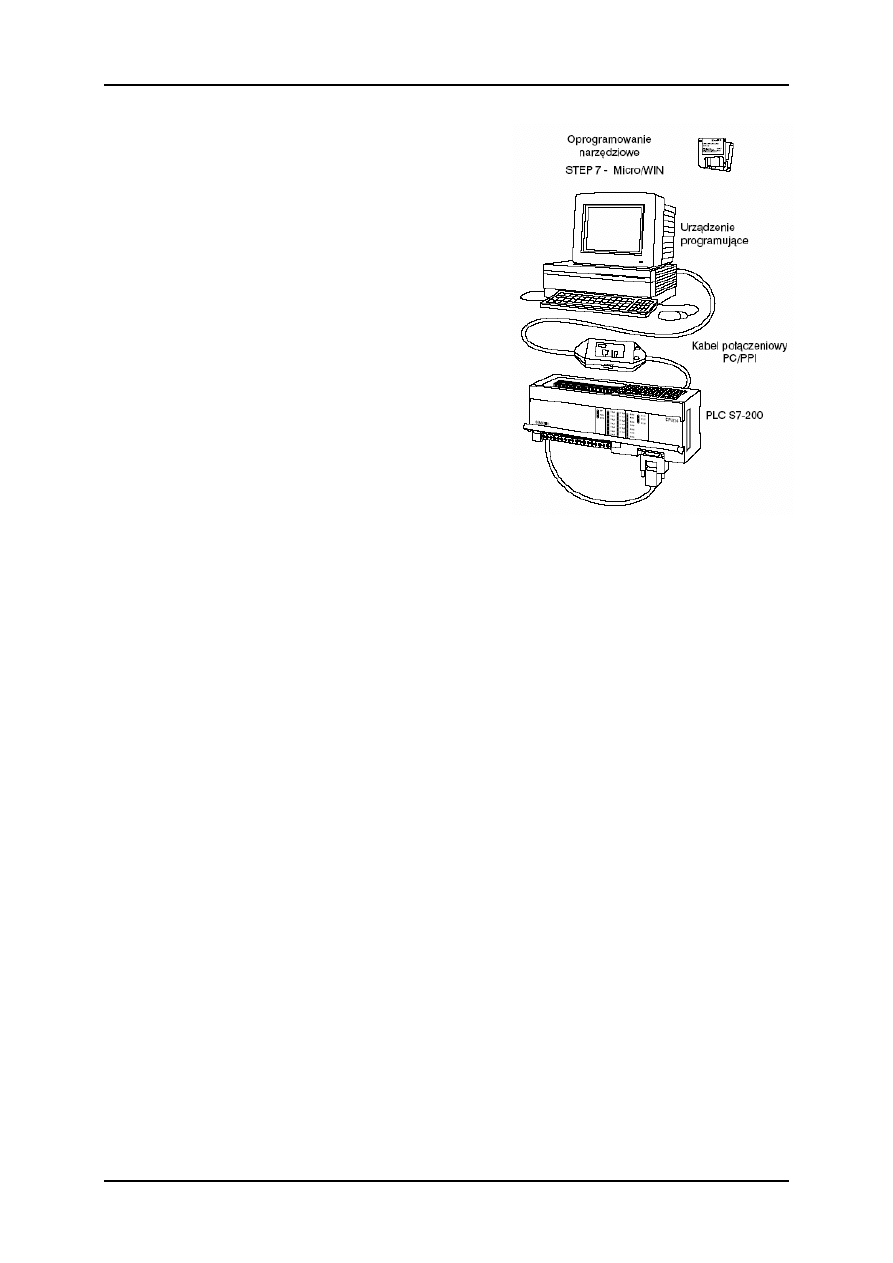
Wymagania podstawowe
Aby stworzyć lub zmienić program interfejsowy
konieczne jest posiadanie następującego
wyposażenia:
• Sterownik programowalny – PLC;
• Urządzenie programujące;
• Oprogramowanie narzędziowe;
• Kabel połączeniowy.
PLC
S7-200 jest nazwą własną jednego ze sterowników
programowalnych firmy Siemens.
Programator
Program tworzony jest w programatorze (PG) a
następnie przesyłany do sterownika PLC. Program dla
S7-200 może być tworzony przy zastosowaniu
ręcznego programatora PG702 lub programatorów
uniwersalnych typu PG720 lub PG740 firmy Siemens z zainstalowanym oprogramowaniem
STEP7 Micro/WIN. Komputer osobisty (PC) z zainstalowanym oprogramowaniem STEP7
Micro/WIN może być także wykorzystany jako programator sterowników serii S7-200.
PG702 jest niewielkim ręcznym programatorem, przeznaczonym wyłącznie do współpracy ze
sterownikami SIMATIC S7-200. Urządzenie to wykorzystuje Boolowski zestaw instrukcji
wbudowany w S7-200. Funkcja Boole'owska jest funkcją logiczną, w której są możliwie dwie
wartości, ON (załączona) lub OFF (wyłączona). Programator PG702 jest przydatny dla
dokonywania modyfikacji lub wyszukiwania usterek. Programatory PG720 i PG740 posiadają
fabrycznie zainstalowane oprogramowanie STEP7 Micro.
Oprogramowanie
Oprogramowanie narzędziowe służy do realizacji programowego opisu zasady działania
sterowanego urządzenia. Oprogramowanie narzędziowe dla sterowników S7-200 nosi nazwę
STEP7-MicroWin i jest instalowane na komputerach osobistych podobnie jak każde inne
oprogramowanie.
Kable połączeniowe PPI
Kable połączeniowe wymagane są dla transmisji danych z programatora do PLC.
Komunikacja może mieć miejsce tylko wtedy, gdy dwa urządzenia „mówią” tym samym
językiem lub używają tego samego protokołu. Komunikacja pomiędzy programatorem firmy
Siemens a sterownikiem S7-200 nazywana jest protokołem PPI (punkt-do-punktu). Do
podłączenia programatorów PG720, PG740 lub PG702 wymagane są odpowiednie kable
zakończone 9-stykowym złączem typu D-Sub. Jest to szeregowe połączenie kompatybilne ze
złączem MPI programatorów i stanowi ono zarazem standardowe złącze dla połączenia
innych elementów sterowniczych. Kiedy używany jest komputer osobisty jako programator
konieczny jest specjalny kabel PC/PPI. Kabel ten umożliwia komunikację pomiędzy
szeregowym interfejsem PLC a szeregowym interfejsem RS-232 komputera osobistego.
Przełączniki DIP na kablu PC/PPI są używane do wybrania odpowiedniej szybkości
(prędkości transmisji) z jaką są przekazywane informacje pomiędzy PLC a komputerem.
Sterowniki programowalne PLC
13
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
2. Sterownik Siemens SIMATIC S7-200
Sterowniki programowalne serii S7-200 są najmniejszymi z całej rodziny sterowników
programowalnych SIMATIC S7. Jednostka centralna CPU oraz wejścia i wyjścia są
zintegrowanymi elementami PLC. Wejścia monitorują dwustanowe urządzenia obiektowe,
takie jak przełączniki i czujniki. Wyjścia natomiast sterują urządzeniami takimi jak silniki i
pompy. Złącze 9-stykowe przeznaczone jest do podłączenia programatora. S7-222 posiada 8
wejść i 6 wyjść zintegrowanych z CPU. Dostępne są trzy rodzaje zasilania sterownika.
Przełącznik trybu pracy
We wszystkich sterownikach S7-200 występuje przełącznik wyboru trybu pracy. Kiedy
przełącznik trybu znajduje się w położeniu RUN, to CPU znajduje się w trybie pracy i
wykonuje program. Natomiast, kiedy przełącznik trybu znajduje się w położeniu STOP, to
działanie CPU jest wstrzymane. Kiedy przełącznik trybu znajduje się w położeniu TERM, to
tryb pracy można wybrać z przyłączonego programatora.
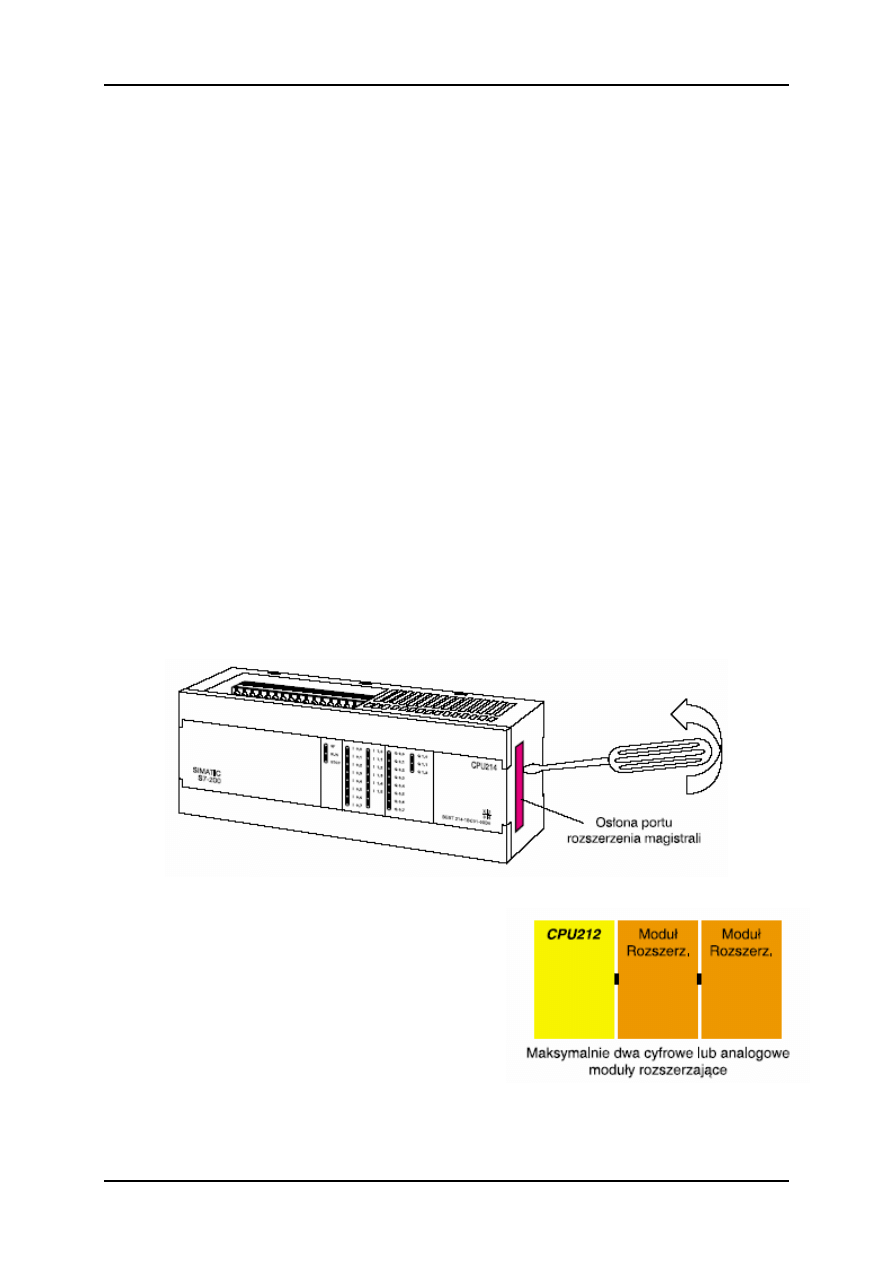
Moduły rozszerzające
Sterowniki S7-200 można rozbudowywać. Moduły rozszerzające zawierają dodatkowe
wejścia i wyjścia. Są one podłączane do jednostki bazowej poprzez złącza magistrali. Dla
zainstalowania modułu rozszerzającego osłona portu magistrali musi być usunięta.
Aby podłączyć moduł rozszerzający do PLC S7-200,
należy połączyć złącze magistrali rozszerzającej
jednostki bazowej i modułu rozszerzającego.
Sterownik S7-212 może być rozbudowany do 78
wejść/wyjść dwustanowych (14 we/wy jest
zintegrowanych z CPU). Wymaga to dwóch
modułów rozszerzających.
Sterowniki programowalne PLC
14
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
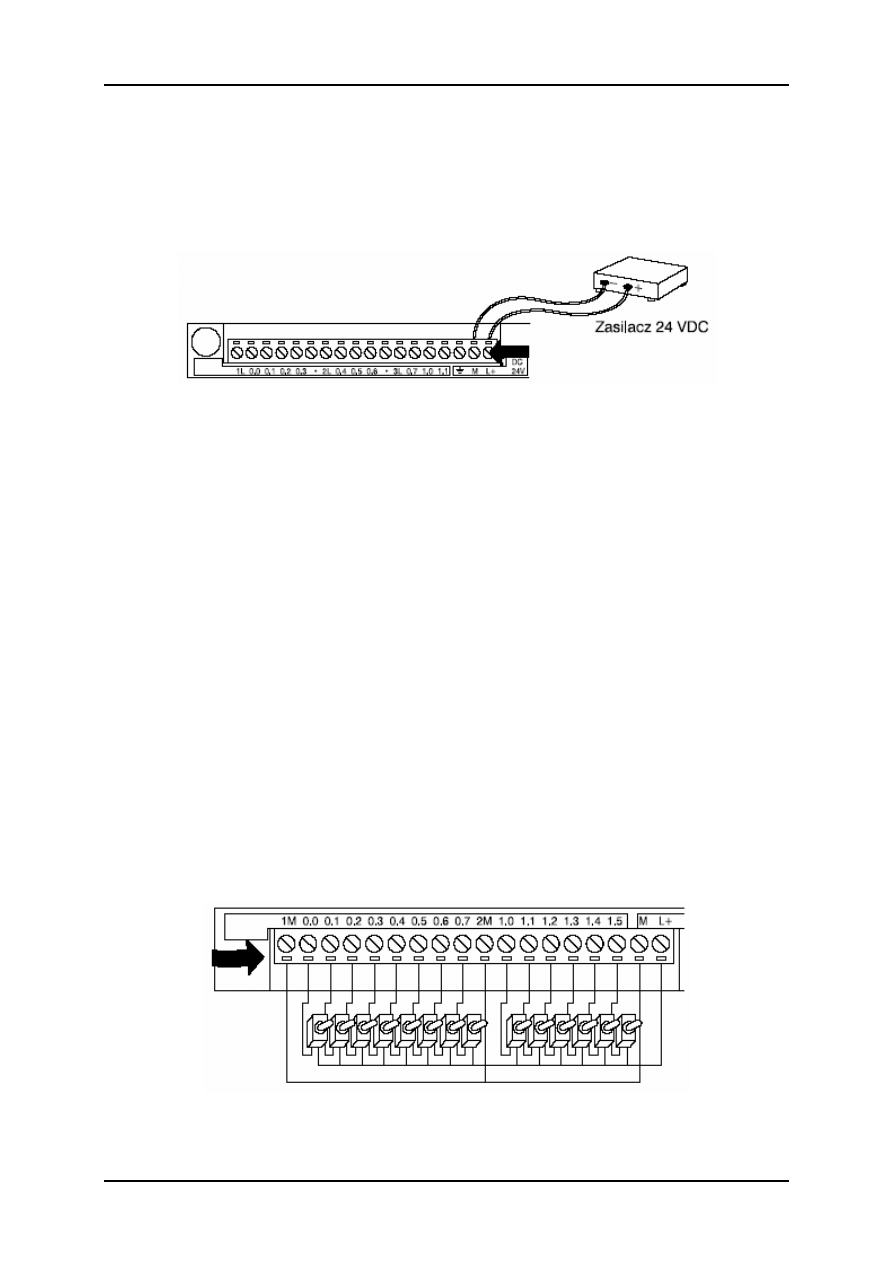
Podłączenie zasilania
S7-200 może być podłączony zarówno do napięcia zasilania 24 VDC jak i 120/230 VAC,
zależnie od typu CPU. Jednostki CPU typu 212 lub 214 DC/DC/DC należy podłączać do
zewnętrznego zasilacza 24 VDC. CPU 212 oraz 214 AC/DC/Relay lub AC/AC/AC zasilane
są z sieci 120 lub 230 VAC.
Adresowanie wejść/wyjść
Wejścia i wyjścia S7-200 opisane są na listwie zaciskowej oraz przy wskaźnikach ich stanu.
Te alfanumeryczne symbole identyfikują adresy wejść/wyjść, do których podłączone są
urządzenia. Zewnętrzne adresy używane są przez CPU do określenia, które wejścia są w
stanie wysokim i które wyjścia powinny być załączone lub wyłączone. Symbolem I są
oznaczone wejścia cyfrowe, a Q wyjścia cyfrowe. Pierwszy numer wskazuje bajt, drugi
numer wskazuje bit w tym bajcie. Na przykład adres I0.0 to wejście przypisane do bitu 0 w
bajcie 0 w przestrzeni wejść sterownika.
I0.0 = bajt 0, bit 0
I0.1 = bajt 0, bit 1
I1.0 = bajt 1, bit 0
I1.1 = bajt 1, bit 1
Wejścia
Urządzenia wejściowe, takie jak przełączniki, przyciski oraz inne czujniki dwustanowe,
podłączane są do listwy zaciskowej znajdującej się pod dolną osłoną PLC.
Wygodną metodą
sprawdzenia programu jest wykorzystanie zatrzaskowych przełączników testowych.
Przełączniki te są włączone pomiędzy dodatnim biegunem zasilania 24 VDC a odpowiednimi
wejściami. Skrajny lewy przełącznik jest połączony z pierwszym wejściem (0.0). Kiedy
przełącznik ten jest zamknięty, to napięcie 24 VDC dołączone jest do wejścia. Odpowiada to
stanowi logicznemu jeden. Kiedy przełącznik jest otwarty, dołączone jest do wejścia napięcie
0 VDC. Odpowiada to logicznemu zeru.
Sterowniki programowalne PLC
15
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
Wyjścia
Urządzenia wyjściowe, takie jak przekaźniki, są podłączane do listwy zaciskowej znajdującej
się pod górną osłoną PLC. Podczas testowania programu nie jest konieczne podłączanie
urządzeń wyjściowych. Wskaźniki stanu (diody LED) sygnalizują aktywny stan wyjść
cyfrowych.
Wejścia i wyjścia analogowe
Sterowniki programowalne PLC obsługują także sygnały analogowe. Typowe sygnały
analogowe mieszczą się w zakresach 0..10VDC lub 4..20mA. Sygnały analogowe używane są
do przedstawiania zmieniających się wartości, takich jak prędkość, temperatura, ciężar i
poziom. CPU nie analizuje tych sygnałów w postaci analogowej, lecz przekształca je do
postaci cyfrowej. Wykorzystany jest tu przekształcający sygnały z wejść analogowych moduł
przetwornika o rozdzielczości 12 bitów. Wartości cyfrowe transmitowane są z modułu
konwertera do CPU do dalszego wykorzystania w programie.
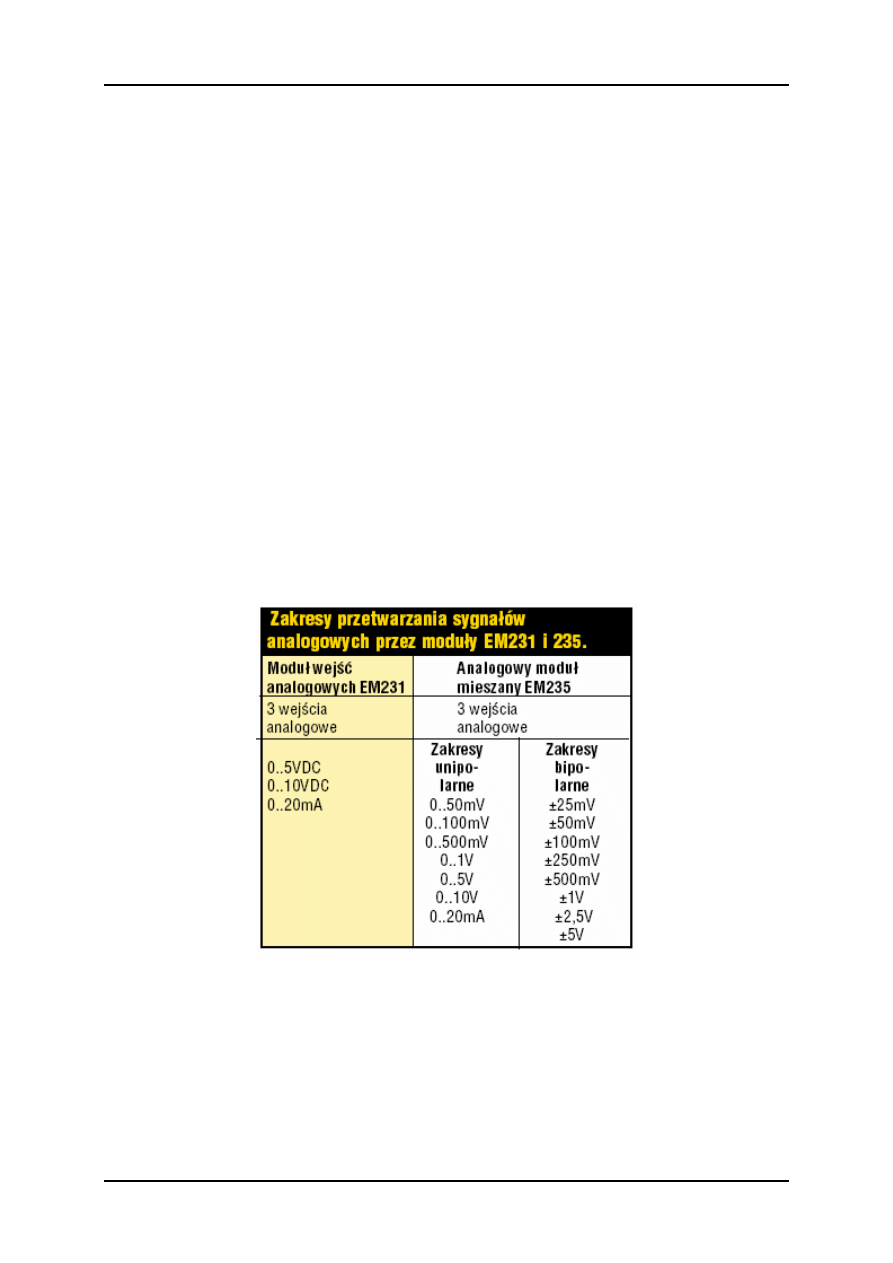
W sterownikach serii S7-200 dostępne są dwa analogowe moduły rozszerzające. Moduł wejść
analogowych EM231 posiadający 3 wejścia analogowe i moduł mieszany EM235 posiadający
3 wejścia analogowe oraz 1 wyjście analogowe. W tabeli przedstawiono zakresy sygnałów
wejściowych i wyjściowych dla modułów analogowych. Zakresy wybierane są poprzez
przełączniki konfiguracyjne znajdujące się na module.
Wejścia analogowe
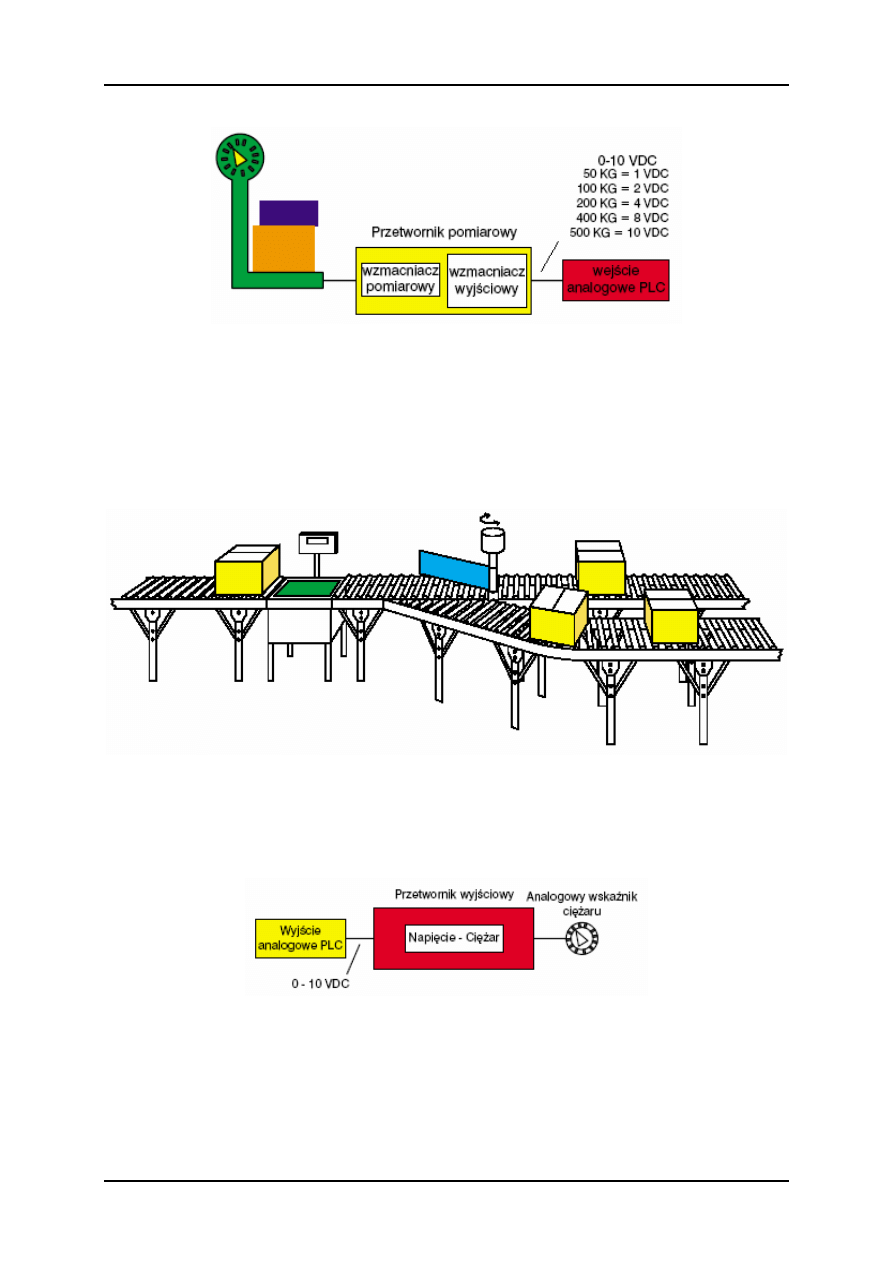
Czujnik obiektowy, który wykonuje pomiary zmieniającej się wartości, podłączany jest do
przetwornika pomiarowego. W przykładzie z rysunku poniżej do przetwornika pomiarowego
podłączony jest czujnik wagowy. Przetwornik pomiarowy jest urządzeniem, które odczytuje
zmieniający się sygnał z czujnika i przetwarza go na standardowe zmienne napięcie lub prąd
wyjściowy.
Sterowniki programowalne PLC
16
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
W tym przykładzie przetwornik pomiarowy przetwarza wartość ciężaru na sygnał napięciowy
w zakresie 0..10 VDC dla zakresu ciężaru 0..500kg. Wyjście sygnału z przetwornika
pomiarowego podłączone jest do wejścia przetwornika analogowo-cyfrowego. Przykład
zastosowania wejścia analogowego przedstawia rysunek poniżej. Paczki, po ich napełnieniu
przesuwające się wzdłuż taśmociągu, są ważone. Paczka, która ma określoną wagę,
kierowana jest na jedną ścieżkę taśmociągu. Paczki, które ważą mniej kierowane są na drugą
ścieżkę taśmociągu, gdzie są ponownie kontrolowane dla sprawdzenia poprawności
zawartości.
Wyjścia analogowe
Wyjścia analogowe współpracują z urządzeniami obiektowymi, sterowanymi ciągłymi
wartościami napięcia lub prądu. Wyjścia analogowe mogą być wykorzystane jako źródła
sygnału dla rejestratorów, elektrycznych napędów silników, mierników analogowych i
regulatorów ciśnienia.
Podobnie jak wejścia analogowe, wyjścia analogowe podłączane są do urządzeń sterowanych
przez dodatkowe przetworniki wyjściowe. Przetwornik pobiera z wyjścia standardowy sygnał
napięciowy lub prądowy i zależnie od wymagań - wzmacnia, tłumi lub zamienia na inny
sygnał, który steruje urządzeniem. Na przykład sygnał 0..10VDC steruje wskaźnikiem
analogowym o zakresie 0..500kg.
Sterowniki programowalne PLC
17
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
Liczniki czasu
Liczniki czasu są urządzeniami, które zliczają przyrosty czasu. Sygnalizacje świetlne są
jednym z przykładów, w którym wykorzystuje się liczniki czasu. Liczniki czasu używane są
w nich do odmierzania odcinków czasu między zmianami świateł.
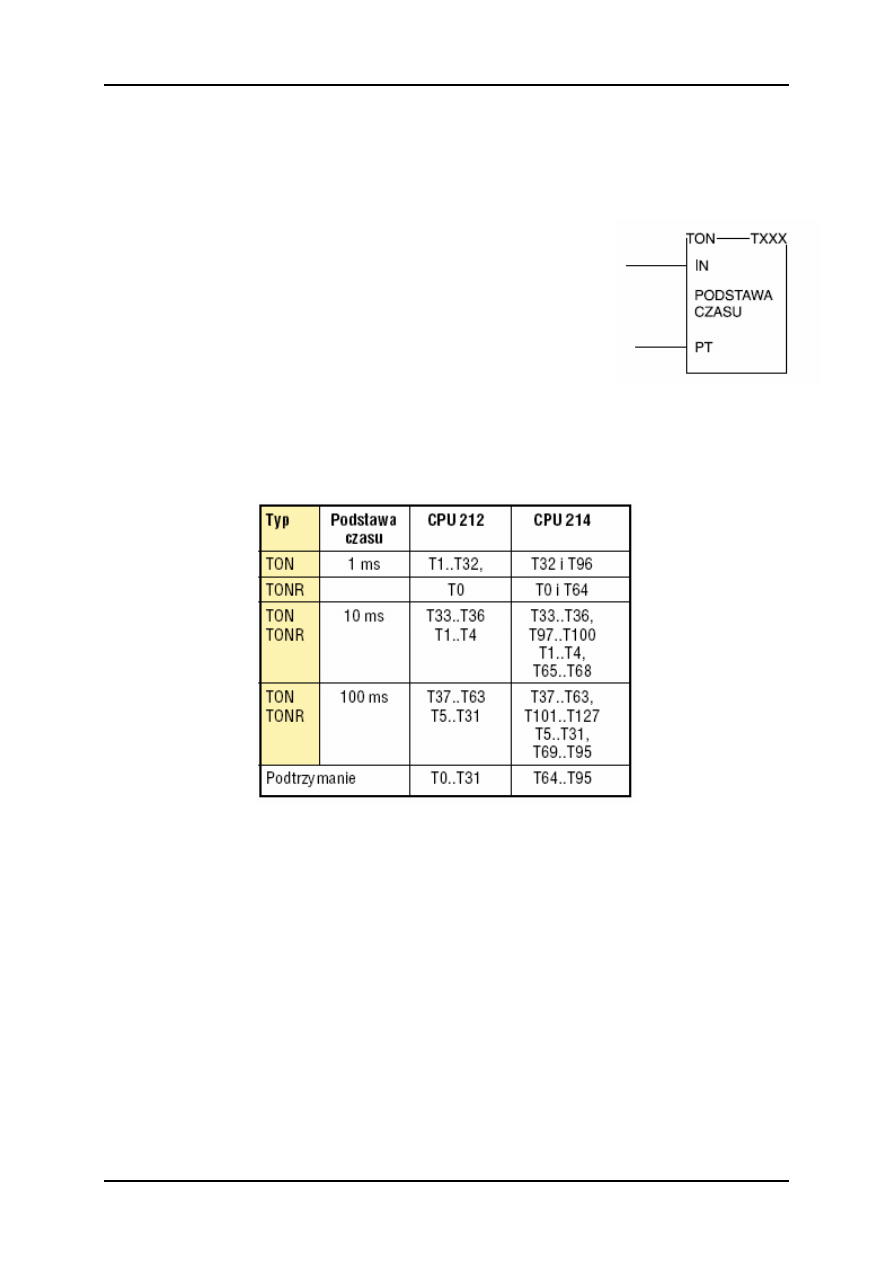
Liczniki czasu reprezentowane są w schemacie drabinkowym przez
prostokąt. Licznik czasu rozpoczyna zliczanie po otrzymaniu
sygnału zezwolenia. Wyjście licznika czasu jest w stanie logicznym
0 tak długo, jak aktualnie odmierzany czas jest krótszy od wartości
zadanej czasu. Kiedy aktualnie zmierzony czas będzie dłuższy od
wartości zadanej, to wyjście licznika czasu zmieni się do stanu
logicznej 1.
Sterownik S7-200 używa dwóch typów członów czasowych:
opóźnienie po załączeniu (TON) oraz opóźnienie po załączeniu z podtrzymaniem (TONR).
Numer licznika czasu (T) określa jego podstawę czasu oraz czy jest to licznik z
podtrzymaniem, czy nie. Wykaz dostępnych liczników pokazano w tabeli poniżej.
Liczniki czasu w S7-200 mają następujące podstawy czasu: 1ms, 10ms i 100ms. Maksymalna
wartość zliczona wynosi odpowiednio 32,767 sekund,
327,67 sekund i 3276,7 sekund.
Wykorzystując inne bloki programowe, liczniki czasu można zaprogramować dla większych
przedziałów czasowych.
Przekaźniki czasowe
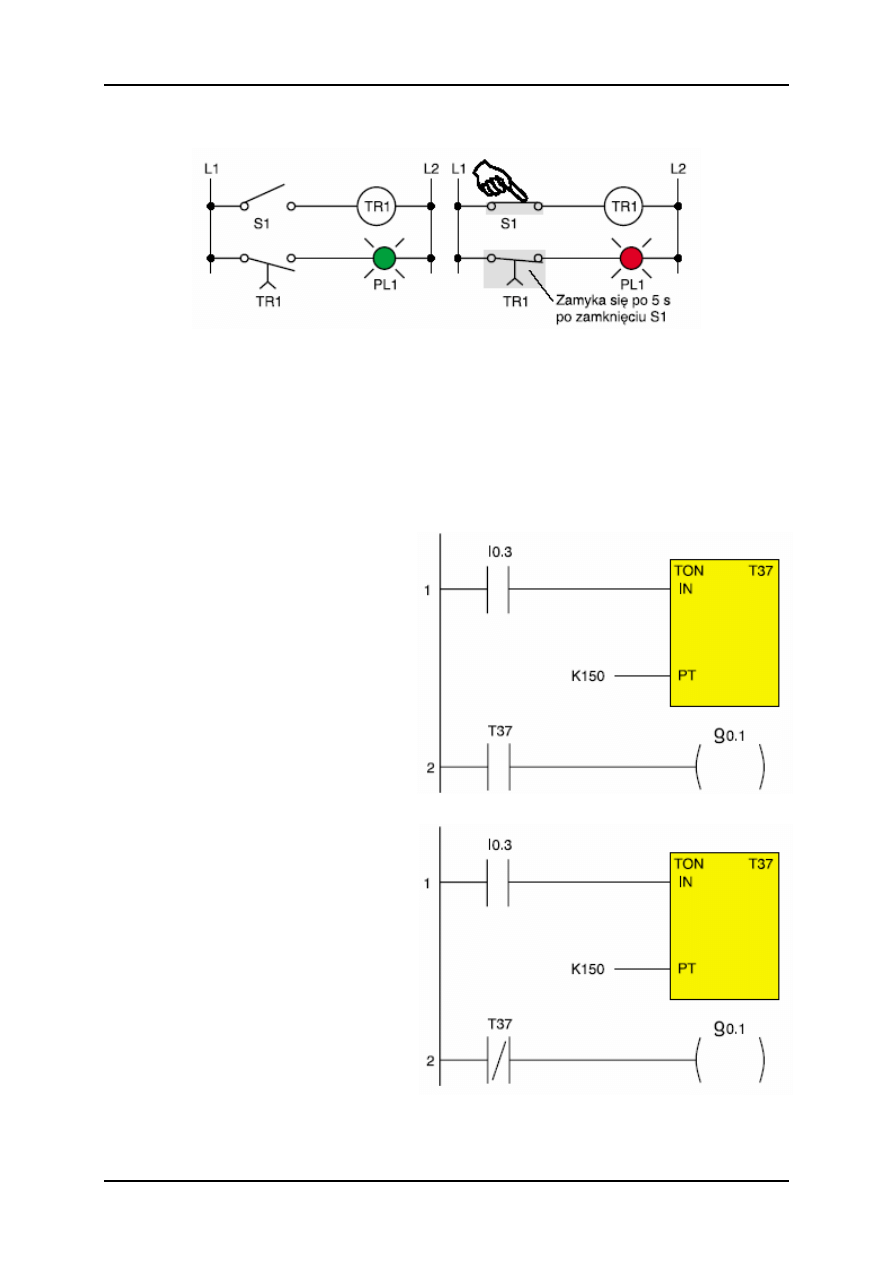
Liczniki czasu w PLC można porównać do przekaźników czasowych używanych w
klasycznym układzie sterowania. W przykładzie z rysunku poniżej normalnie otwarty (NO)
styk przełącznika (S1) jest połączony szeregowo z przekaźnikiem czasowym (TR1).
W tym przykładzie przekaźnik ustawiony został na 5 sekund. Kiedy S1 zostanie zamknięty,
TR1 rozpocznie odliczanie. Po upływie 5 sekund TR1 zamknie swoje dodatkowe normalnie
otwarte styki TR1 zapalając lampkę PL1. Kiedy styk S1 zostanie otwarty, styki TR1 otwierają
się natychmiast gasząc lampkę PL1. Taki przekaźnik czasowy nazywany jest przekaźnikiem
ze zwłoką po załączeniu.
Sterowniki programowalne PLC
18
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
Opóźnienie po załączeniu (TON)
Sygnał wyzwalający (logiczna 1) na wejściu (IN) licznika czasu typu TON rozpoczyna
odliczanie ustawionego czasu - (PT). Po osiągnięciu wartości zadanej, załączony jest bit stanu
licznika czasu (bit - T). Bit T jest wewnętrznym stanem licznika czasu i nie jest pokazany na
jego graficznym symbolu. Licznik czasu zeruje odliczone wartości czasu, kiedy wejście
wyzwalające zmienia stan logiczny na 0.
W przykładzie jak na rysunku obok,
wykorzystano liczniki czasu, przełącznik
podłączony jest do wejścia 1 (I0.3), a
lampka podłączona jest do wyjścia 2
(Q0.1). Kiedy przełącznik zostaje
zamknięty, wejście 1 przyjmuje stan
logiczny 1, który powoduje wyzwolenie
licznika czasu T37. Wybrano podstawę
czasu o wartości 100 ms (.100 s), zaś
wartość
zadana (PT) jest równa 150.
Odpowiada to 15 sekundom (.100 s
x150). Lampka zapali się więc po 15 s
od momentu załączenia przełącznika.
Jeśli przełącznik zostanie otwarty przed
upłynięciem czasu 15 s, to lampka
zostanie wyłączona. Ponowne załączenie
spowoduje, że licznik czasu rozpocznie
odliczanie od 0.
W kolejnym programie zilustrowano
przykładowo elastyczność systemu PLC.
Poprzez przeprogramowanie styku T37
na styk normalnie zamknięty, funkcja
układu została zmieniona, aby
powodować wyłączenie
światła
wskaźnika tylko wtedy, gdy licznik czasu
jest wyłączony. Zmiana funkcjonowania
została wykonana bez modernizacji
okablowania wejść/wyjść sterownika.
Sterowniki programowalne PLC
19
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
Opóźnienie po załączeniu z podtrzymaniem (TONR)
Licznik czasu TONR działa w podobny sposób jak TON. Istnieje tylko jedna różnica. TONR
zlicza czas, gdy wejście wyzwalające jest załączone, lecz nie jest kasowany, kiedy zostanie
ono wyłączone. Tego typu licznik czasu musi być skasowany za pomocą instrukcji kasowania
RESET (R).
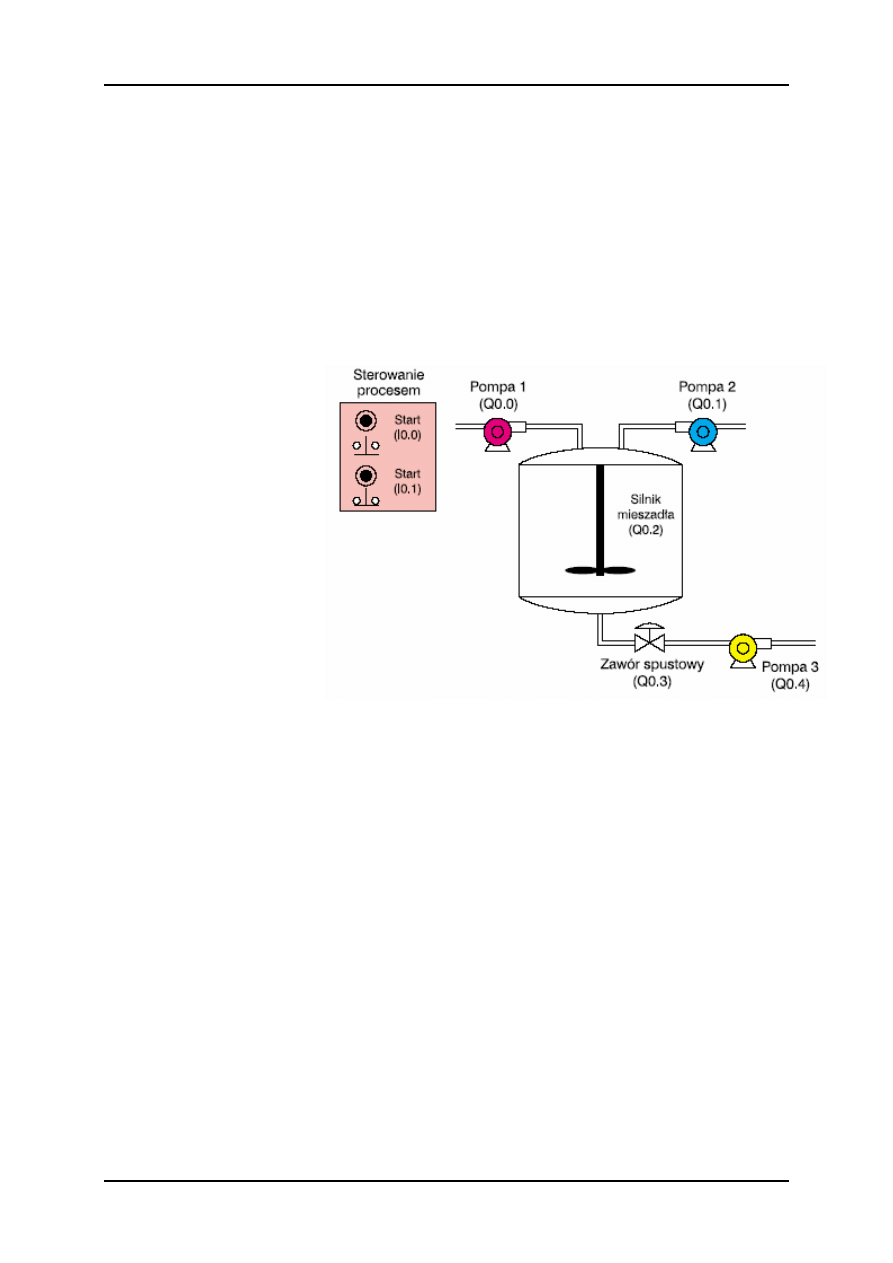
Przykład wykorzystania licznika czasu
W przykładzie z rysunku poniżej zbiornik będzie napełniany dwoma substancjami
chemicznymi, następnie zostaną one wymieszane i wypompowane.
Po wciśnięciu przycisku
Start (wejście 1 - I0.0),
program uruchomi pompę
1, sterowaną przez wyjście
1 (Q0.0). Pompa 1
uruchomi się na 5 s,
napełniając zbiornik
pierwszą substancją, po
czym wyłączy się.
Następnie program
uruchomi pompę 2,
sterowaną przez wyjście 2
(Q0.1). Pompa uruchomi się
na 3 s napełniając zbiornik
drugą substancją. Następnie
program uruchomi silnik
mieszadła podłączonego do
wyjścia 3 (Q0.2) i nastąpi mieszanie substancji przez 60 s. Po wymieszaniu program otworzy
zawór spustowy sterowany przez wyjście 4 (Q0.3) i uruchomi pompę 3 sterowaną przez
wyjście 5 (Q0.4). Pompa 3 wyłączy się po 8s, a cały proces się zatrzyma. Układ sterowania
wyposażono także w przycisk Stop dołączony do wejścia 2 (I0.1).
Liczniki zdarzeń
Liczniki zdarzeń w PLC zapewniają takie same funkcje jak liczniki mechaniczne. Liczniki
porównują zakumulowaną wartość zliczoną z wartością zadaną. Aplikacje, które najczęściej
wykorzystują liczniki zdarzeń, wymienione są poniżej:
• Zliczanie zdarzeń do nastawionej wartości zadanej i w celu realizacji kolejnego kroku
algorytmu.
• Wykonywanie zadania do momentu, osiągnięcia nastawionej wartości zadanej.
Na przykład maszyna pakująca butelki może wykorzystać licznik zdarzeń do zliczania butelek
w grupy po sześć do pakowania.
Liczniki w schemacie drabinkowym reprezentowane są przez prostokątne bloki. Liczniki
zwiększają/zmniejszają wartość zliczoną o jeden za każdym razem, kiedy na wejściu zmienia
się sygnał z niskiego (logiczne 0) na wysoki (logiczna 1). Liczniki są kasowane podczas
wykonywania instrukcji kasowania RESET. Sterownik S7-200 posiada dwa typy liczników:
licznik w górę (CTU) i licznik dwukierunkowy w górę i w dół (CTUD).
Sterowniki programowalne PLC
20
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
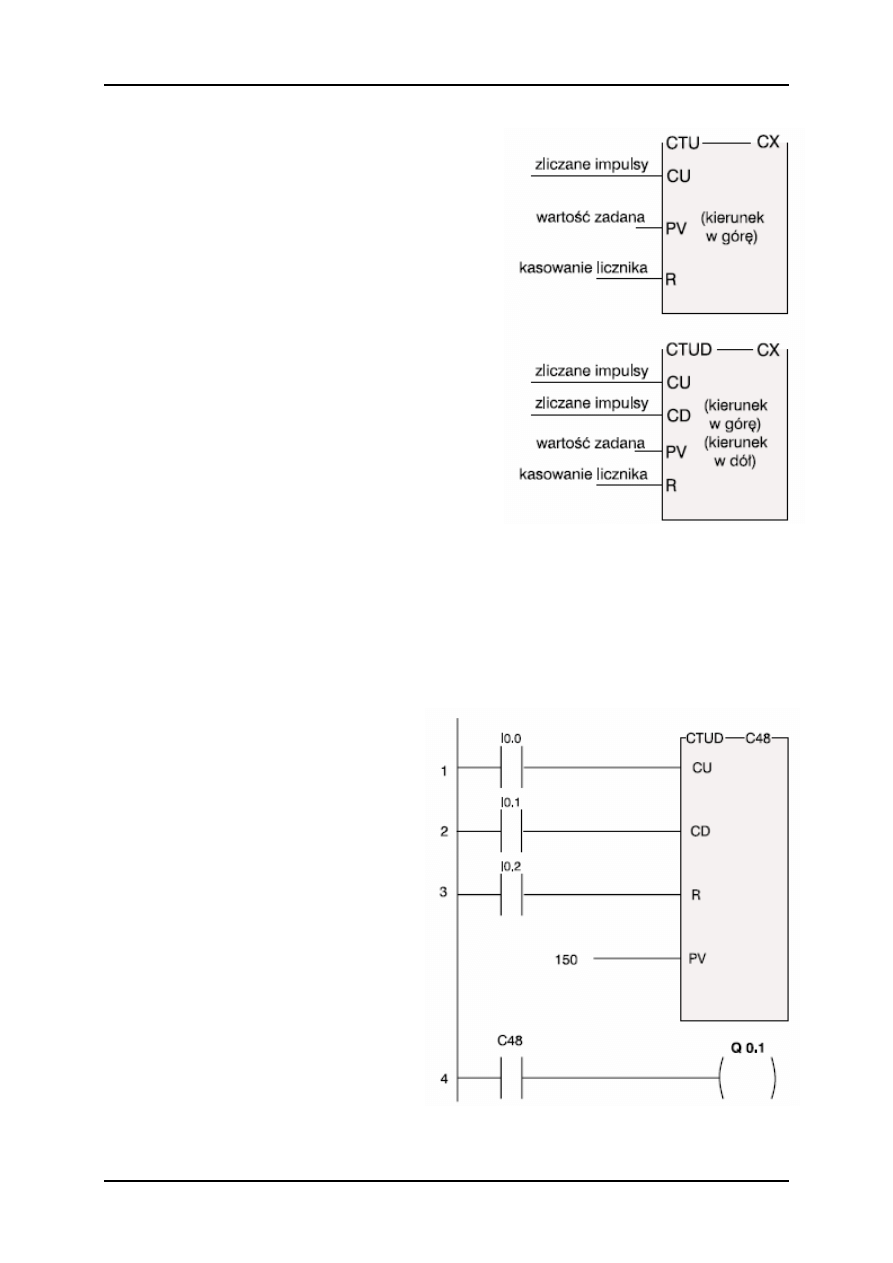
Licznik w górę
Licznik w górę ma dwa wejścia do sterowania bitem
stanu licznika (bit C). Wejście CU jest wejściem
zliczanych impulsów. Każdorazowa zmiana stanu na
wejściu CU licznika (ze stanu zero do stanu jeden)
powiększa wartość zliczoną o jeden. Wejście R służy
do kasowania. Wartość zadana licznika pamiętana
jest na wejściu PV. Jeżeli aktualna wartość zliczona
jest równa lub większa od wartości zadanej, to
wyjście (bit C) zmienia stan na 1. Licznik zlicza do
wartości maksymalnej tj. 32767.
Licznik dwukierunkowy
W liczniku dwukierunkowym są wykorzystywane
trzy wejścia do sterowania bitem wyjściowym
licznika (bit C). Wejście CU jest wejściem
zliczającym w górę. Każda zmiana sygnału na
wejściu CU ze stanu 0 do stanu 1 powiększa
zliczoną wartość o jeden. Wejście CD jest wejściem zliczającym w dół. Każda zmiana na CD
ze stanu 0 do stanu 1 pomniejsza zliczoną wartość o jeden. Wejście R służy do kasowania.
Nastawiona wartość licznika pamiętana jest na wejściu PV. Jeśli aktualnie liczona wartość
równa jest lub większa niż wartość nastawiona w PV, to wyjście (bit C) zmienia wartość na 1.
Licznik zlicza w górę do maksymalnej wartości 32767 i w dół do wartości minimalnej -
32767.
Przykład zastosowania licznika
Licznik może być na przykład
wykorzystany do zapewnienia płynności
poruszania się określonej liczby
samochodów w obszarze parkingu. Kiedy
samochody wjeżdżają na parking przez
bramkę wjazdową, wartość licznika
powiększana jest o jeden. Podczas
wyjeżdżania samochodu przez bramkę
wartość licznika zmniejszana jest o jeden.
Kiedy parking zostanie zapełniony, przy
bramce wjazdowej zaświeci się
sygnalizacja informująca, że parking jest
pełny.
W przykładzie tym wykorzystany został
licznik dwukierunkowy C48. Czujnik
otwarcia bramki wjazdowej podłączony
został do wejścia 1 (I0.0), zaś z bramki
wyjazdowej do wejścia 2 (I0.1).
Przełącznik kasowania, umieszczony w

Sterowniki programowalne PLC
21
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
budce dyżurnego, podłączono do wejścia 3 (I0.2). Parking posiada 150 miejsc parkingowych.
Wartość ta jest zapamiętana jako wartość zadana (PV). Bit C (wyjście licznika) przez wyjście
4 (Q0.1) steruje sygnalizacją „Parking zapełniony”.
Kiedy samochody wjeżdżają na parking, bramka jest otwierana. Wejście 1 (I0.0) zmienia stan
z 0 na 1, zwiększając zawartość licznika o jeden. Kiedy zaś samochód opuszcza parking,
otwierana jest bramka wyjazdowa. Wejście 2 (I0.1) zmienia stan z 0 na 1, zmniejszając
zawartość licznika o jeden. W momencie, gdy licznik osiągnie wartość 150, wyjście 4 (Q0.1)
zmienia stan z 0 na 1. Sygnalizacja „Parking zapełniony” zostaje zapalona. Gdy jakiś
samochód wyjedzie z parkingu, zmniejsza się zawartość licznika do 149 i sygnalizacja
zostanie wyłączona.
Szybkie instrukcje
Program PLC wykonywany jest w zamkniętej pętli. Czas skanowania (obiegu pętli, czyli
wykonania wszystkich instrukcji) zależy od długości tego programu i liczby obsługiwanych
wejść/wyjść. W rzeczywistych aplikacjach mogą wystąpić zdarzenia wymagające
natychmiastowej reakcji sterownika bez względu na długość pętli programowej. W takich
aplikacjach mogą być wykorzystane szybkie instrukcje, takie jak przerwania, szybkie
odwzorowanie wyjść i transmisje.
Szybkie liczniki
W schemacie drabinkowym szybkie liczniki reprezentowane są przez prostokątne bloki.
Sterowniki w zależności od CPU posiadają różną liczbę szybkich liczników (HSC0, HSC1,
HSC2).
HSC0
Maksymalna częstotliwość zliczania dla tego licznika wynosi 2kHz. HSC0 jest licznikiem
dwukierunkowym. Kierunek zliczania (w górę lub w dół) określony jest przez program
użytkownika.
HSC1 i HSC2
Drugi (HSC1) i trzeci (HSC2) szybki licznik mogą być użyte w jednym z 12 trybów pracy
określanych przez blok wyboru trybu pracy. Każdy licznik posiada określone wejścia
zliczanego sygnału, kierunku zliczania, kasowania i startu. Maksymalna częstotliwość
zliczania HSC1 i HSC2 wynosi 7kHz. Liczniki te można konfigurować do pracy wspólnej w
celu zliczania impulsów o większej częstotliwości wynikającej z przesunięcia fazowego.
Tryby pracy umożliwiają wybór stosunku zliczania 1x lub 4x. Przy stosunku 1x maksymalna
częstotliwość zliczania wynosi 7kHz. Przy stosunku 4x maksymalna częstotliwość zliczania
wynosi 28kHz.
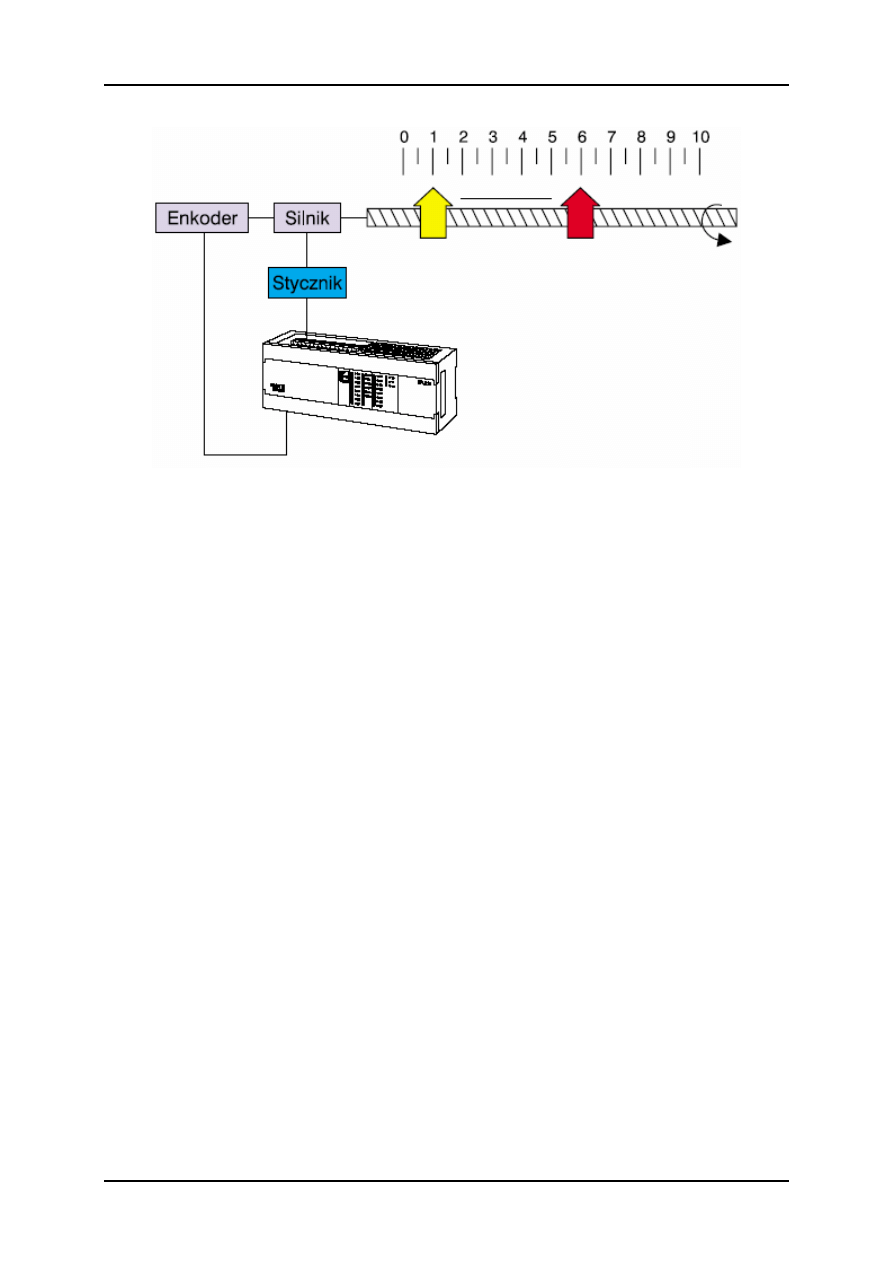
Pozycjonowanie
Pozycjonowanie jest jednym z przykładów zastosowania, w którym można wykorzystać
szybkie liczniki.
Sterowniki programowalne PLC
22
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
W przykładzie z rysunku powyżej stycznik podłączony jest poprzez starter do PLC. Wał
silnika podłączony jest do enkodera i elementu pozycjonowanego. Enkoder generuje impulsy
podczas pracy silnika. W tym przykładzie przesuwany będzie wskaźnik z pozycji 1 do pozycji
6. Załóżmy, że enkoder generuje 600 impulsów na obrót, a potrzebnych jest 1000 obrotów
silnika do przesunięcia wskaźnika do kolejnej pozycji. Aby wykonać żądane przesunięcie,
potrzeba 5000 obrotów silnika. Licznik zliczy do 3000000 (5000 obrotów x 600 impulsów na
obrót) i zatrzyma silnik.
Przerwania
Przerwania to kolejny przykład instrukcji, która jest wykonana w dowolnym momencie cyklu.
W zależności od modułu CPU możliwa jest obsługa:
- zdarzeń przerwań obiektowych (wejść/wyjść),
- przerwań czasowych,
- przerwań z portu komunikacji szeregowej (odbiór i transmisja),
- przerwań szybkiego licznika,
- przerwań wyjścia ciągu impulsów (PTO).
Szybkie wyjścia
Instrukcje szybkiego wyjścia są dostępne tylko w niektórych modułach CPU. Wyjścia takie
(np.: wyjście 1 (Q0.0) i wyjście 2 (Q0.1)) mogą służyć do generowania ciągu impulsów
(PTO) lub impulsów z modulacją szerokości (PWM).
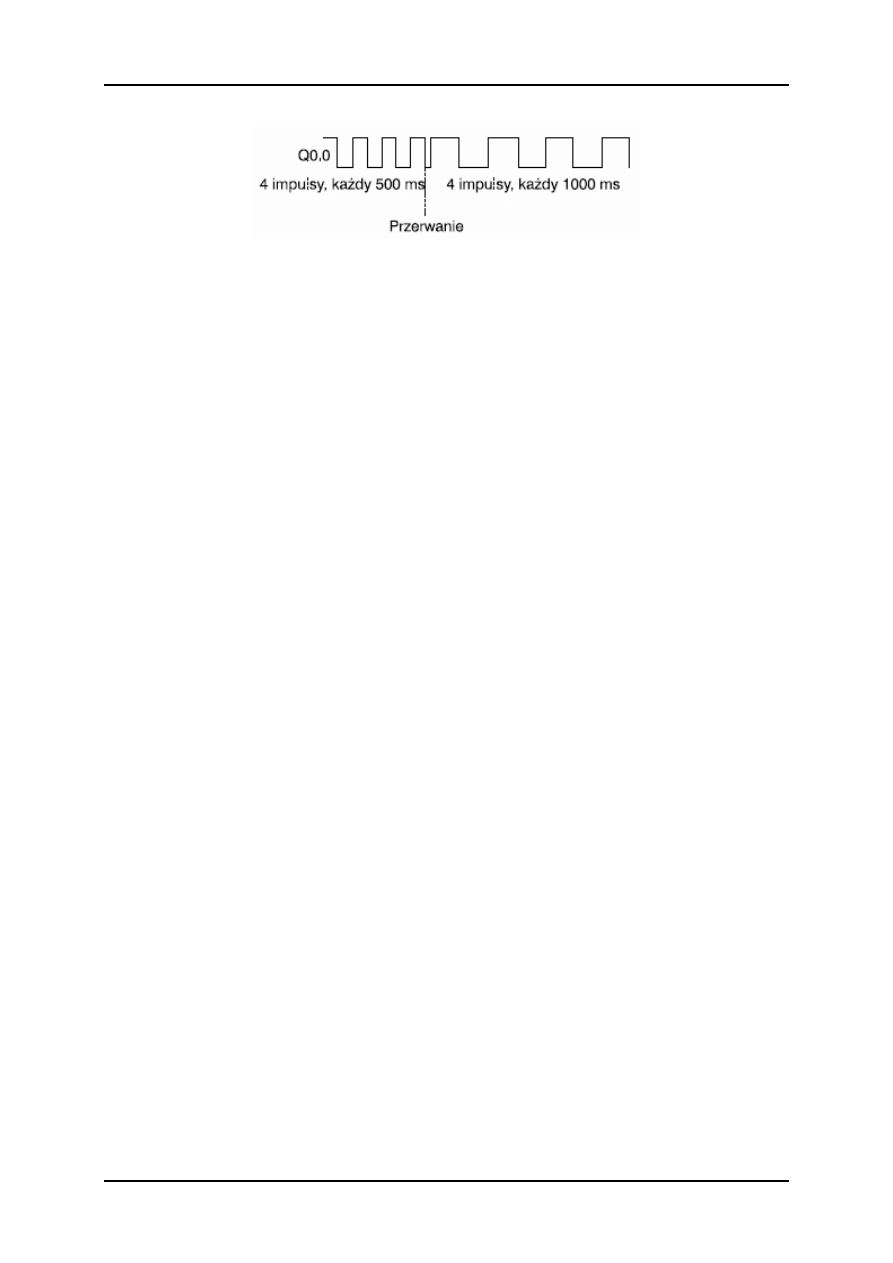
PTO
Wyjście PTO służy do generowania ciągu impulsów dla urządzeń takich jak np.: silnik
krokowy. PTO dostarcza określonej liczby impulsów prostokątnych w określonym czasie.
Liczba impulsów może zawierać się w przedziale od 1 do 4294967295. Czas generowania
ciągu impulsów może mieć wartość z przedziału od 250 do 65535µs lub od 2 do 65535ms.
Sterowniki programowalne PLC
23
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
PTO zapewnia 50% wypełnienie przebiegu. Oznacza to, że impuls posiada poziom wysoki i
niski przez taki sam czas. Liczba impulsów i czas cyklu mogą być zmieniane za pomocą
przerwania. W przykładzie z rysunku powyżej każdy impuls jest załączany i wyłączany co
500ms. Po czterech impulsach pojawiło się przerwanie, które zmienia czas cyklu na 1000ms.
PWM
Funkcja Modulacji Szerokości Impulsu (PWM) umożliwia zmianę wypełnienia generowanych
impulsów wyjściowych. Okres i szerokość impulsu mogą być określone w przedziałach od
250 do 65,535µs lub od 2 do 65,535ms. Szerokość impulsu odpowiada czasowi z zakresu od
0 do 65535µs lub od 0 do 65535ms. Kiedy szerokość impulsu równa jest jego okresowi,
wypełnienie wynosi 100% i wyjście załączone jest bez przerwy. Funkcja PWM może być
wykorzystywana do programowalnej regulacji lub dostrajania sterowanych urządzeń.
Umożliwia to zmianę parametrów pracy dla różnych wariantów produktów lub kompensację
w miarę mechanicznego zużywania się maszyny.
Podłączanie urządzeń zewnętrznych
Terminal tekstowy TD200
Port programatora w S7-200 może być wykorzystany do komunikacji z różnorodnymi
urządzeniami zewnętrznymi. Jednym z takich urządzeń jest terminal tekstowy TD200. Moduł
TD200 wyświetla komunikaty odczytywane ze sterownika S7-200, umożliwiając obserwację
zmiennych programowych. Zapewnia ponadto możliwość wymuszenia stanów wewnętrznych
oraz pozwala
na ustawienia czasu i daty. Terminal TD200 może być podłączony do
zewnętrznego zasilacza, może także być zasilany z S7-200.
Port programatora S7-200 posiada możliwość transmisji w trybie nazywanym trybem
swobodnego portu. Tryb swobodnego portu umożliwia podłączenie się do rozmaitych
inteligentnych urządzeń, takich jak np.: czytniki kodu paskowego, drukarki dowolnego
producenta.

Sterowniki programowalne PLC
24
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
3. Podstawy programowania sterowników PLC
Do tworzenia programów roboczych sterowników PLC S7-200 jest stosowane
oprogramowanie STEP 7-MicroWIN. Program użytkowy składa się z pewnej liczby instrukcji
ułożonych w odpowiednim porządku logicznym odzwierciedlającym opis pracy sterowanego
urządzenia. Instrukcje podzielone są na trzy grupy: instrukcje standardowe, specjalne i
instrukcje szybkie.
Instrukcje standardowe
Instrukcje standardowe znajdują się w większości programów. Instrukcje standardowe
opisują: liczniki czasu, liczniki zdarzeń, połączenia logiczne, pętle programowe,
inkrementacje, negacje, przesunięcia oraz instrukcje blokowe.
Instrukcje specjalne
Instrukcje specjalne używane są do obsługi danych. Instrukcje specjalne zawierają rozkazy
przesunięcia, grupowania w tablicach, szukania, konwersji, iteracji oraz instrukcje czasu
rzeczywistego.
Instrukcje szybkie
Instrukcje szybkie umożliwiają obsługę zdarzeń w trybie przerwań, niezależnie od
skanowania PLC. Są to instrukcje obsługi szybkich liczników zdarzeń, przerwań
obiektowych, aktualizacji stanu wyjść i instrukcje transmisji. Język STEP 7-Micro zawiera
więcej niż 130 instrukcji.
Tryby pracy
Program narzędziowy STEP 7-Micro może działać w trybie Off-line (bez połączenia ze
sterownikiem) lub On-line (z bezpośrednią komunikacją ze sterownikiem). Programowanie w
trybie Off-line umożliwia edycję schematu drabinkowego i przedstawienie zadań
sterowniczych. W tym trybie pracy sterownik PLC nie jest podłączony do programatora.
Praca w trybie On-line wymaga podłączenia programatora do
sterownika. W tym trybie
zmiany programu ładowane są do PLC. Dodatkowo, stany elementów
wejściowych/wyjściowych mogą być monitorowane. Procesor (CPU) może być uruchamiany,
zatrzymywany lub kasowany.
Symbole
Aby zrozumieć wykonywanie instrukcji PLC, konieczne jest poznanie specyficznego języka -
drabinkowego. Język logiki drabinkowej PLC składa się z powszechnie używanego zestawu
symboli, które reprezentują elementy kontroli oraz instrukcje.
Styki
Jednym z najtrudniejszych aspektów programowania PLC dla początkujących użytkowników
jest związek pomiędzy wynikiem operacji logicznej (bitem stanu), odwzorowującym rezultat
działania rozkazu, a funkcjami programowymi, które
wykorzystują ten bit.
Dwie z najczęściej używanych funkcji programowych to
styk normalnie otwarty (NO) oraz styk normalnie
zamknięty (NC). Mówiąc obrazowo, prąd przepływa
Sterowniki programowalne PLC
25
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
przez styki, gdy są one zamknięte. Stykowi normalnie otwartemu (NO) jest
przyporządkowana wartość prawda (bit stanu = 1), gdy kontrolowane wejście lub wyjście jest
w stanie 1. Stykowi normalnie zamkniętemu (NC) jest przyporządkowana wartość logiczna
prawda (bit stanu = 1), gdy stan kontrolowanego wejścia lub wyjścia równa się 0.
Cewki
Symbol cewki przekaźnika odwzorowuje na schemacie wyjście dwustanowe. Adres tego
wyjścia odpowiada oznaczeniu fizycznego zacisku.
Warunkiem załączenia cewki (ustawienia wyjścia w stan 1)
jest stan 1 bitu odzwierciedlającego rezultat zadania
logicznego realizowanego przez obwód sterujący cewkę. Stan
tego bitu (jako stan wyjścia) może być także wykorzystany w
innych obwodach sterowniczych.
Bloki
Bloki reprezentują różne instrukcje lub funkcje, które są
wykonywane, gdy są spełnione warunki logiczne ich realizacji
(bit stanu = 1). Typowymi funkcjami oznaczanymi jako bloki
są liczniki czasu, liczniki zdarzeń i operacje matematyczne.
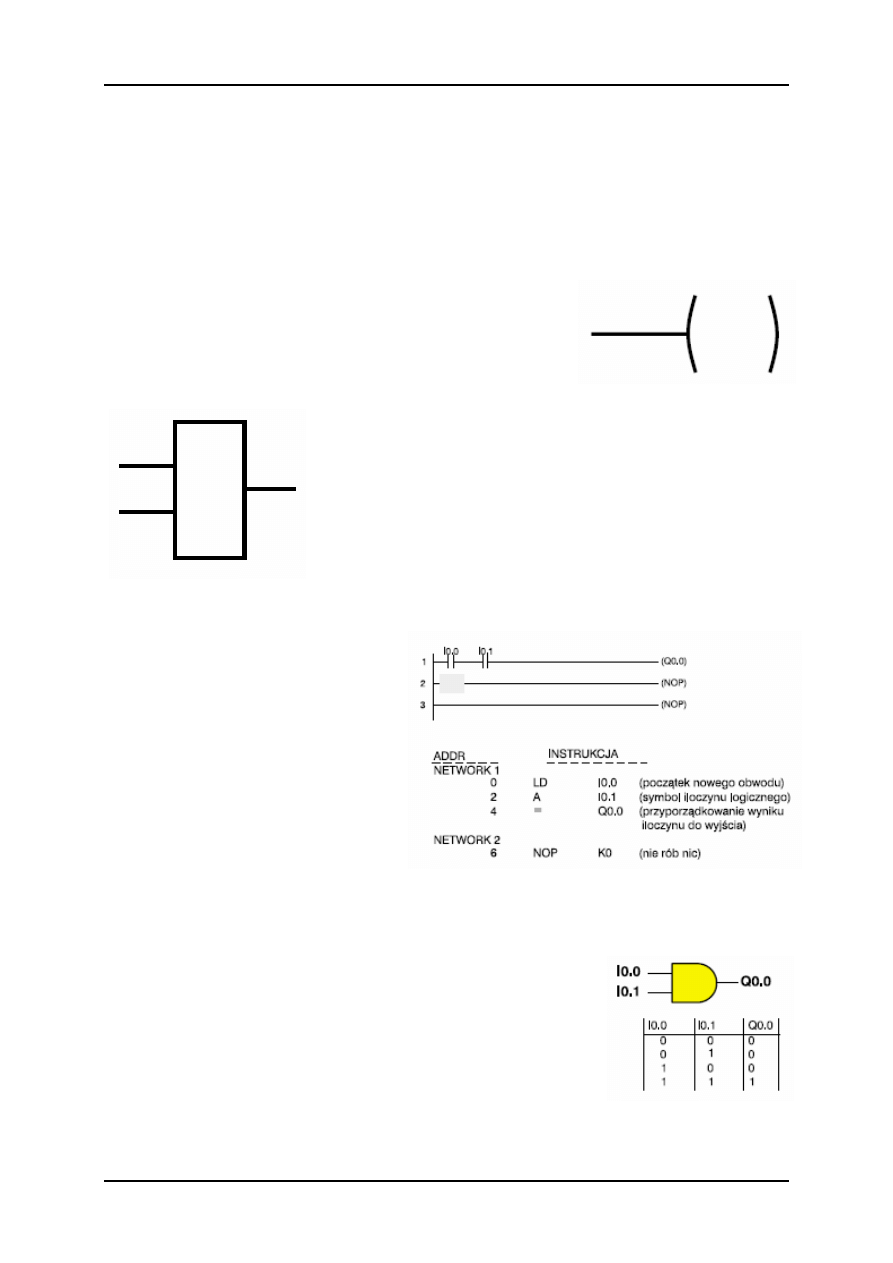
Operacja AND
Każdy obwód w schemacie
drabinkowym reprezentuje operację
logiczną. W przykładzie programu z
rysunku obok pokazano operację
iloczynu logicznego AND. Klawisze
funkcyjne użyte zostały do wybrania
symboli dwóch styków i jednej cewki
wyjściowej. Stan wyjścia Q0.0
obwodu 1 odpowiada iloczynowi
logicznemu stanów wejść I0.0 i I0.1.
Lista instrukcji nowej operacji
logicznej zawsze rozpoczyna się instrukcją ładowania (LD). W przykładzie wejście I0.0
(pierwsze wejście) i I0.1 (wejście drugie) – A (AND - operacja iloczynu logicznego) w liście
instrukcji – muszą mieć wartość prawda, aby wyjście Q0.0 (pierwsze wyjście) miało wartość
prawda.
Innym sposobem przedstawienia funkcji AND jest schemat
logiczny Boole'a. W logice Boole'a symbol bramki AND ma
wejścia po lewej stronie. W naszym przykładzie mamy dwa
wejścia. Wyjście jest zaznaczone po prawej stronie. Działanie
bramki można zrozumieć po prześledzeniu jej tabeli stanów. Aby
stan wyjścia był równy logicznej 1, oba wejścia muszą być w
stanie logicznym 1.
Sterowniki programowalne PLC
26
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
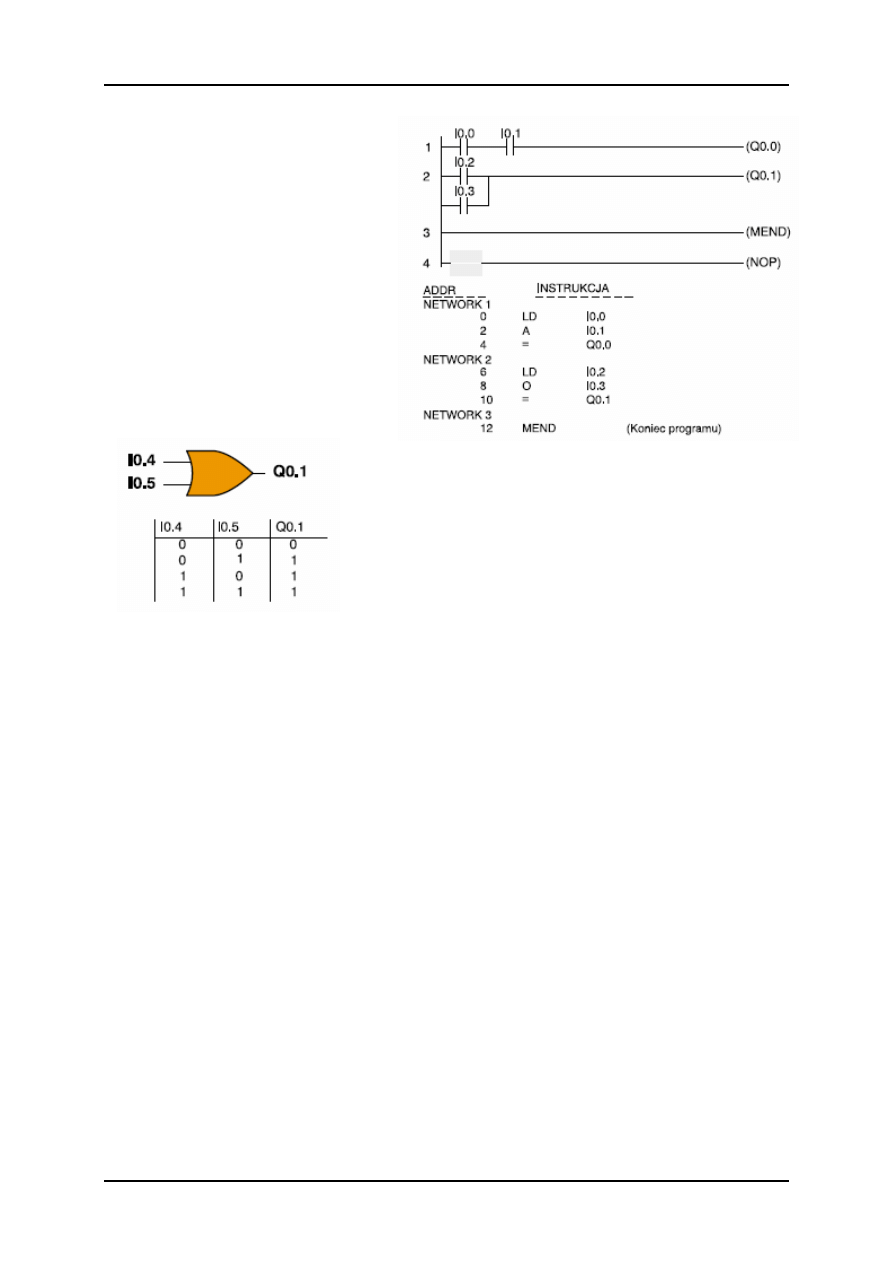
Operacja OR
W kolejnym przykładzie program
został rozszerzony o drugi obwód,
aby przedstawić zastosowanie
operacji OR. Łatwo zauważyć, że
jeśli wejście I0.2 (wejście 3) lub
wejście I0.3 (wejście 4) – O (OR –
operacja sumy logicznej) w liście
instrukcji lub oba są w stanie 1, to
wyjście Q0.1 (wyjście 2) będzie
również w stanie wysokim 1.
Innym sposobem przedstawienia funkcji OR jest schemat
logiczny Boole'a. Symbol graficzny bramki OR różni się
nieznacznie od symbolu AND. Symbol bramki OR ma
wejścia po lewej stronie. W naszym przykładzie mamy
dwa wejścia. Wyjście jest rysowane po prawej stronie.
Działanie bramki można zrozumieć po prześledzeniu
tabeli stanów. Aby stan wyjścia był równy logicznej 1, na
dowolnym wejściu musi być logiczna 1.
Koniec programu
Instrukcja końca głównego programu (MEND) musi być umieszczona jako ostatnia w
programie. CPU wykorzystuje tę instrukcję, aby rozpoznać, że program się kończy. Instrukcja
MEND wprowadzana jest do oddzielnego obwodu. CPU sprawdza program po kolei,
rozpoczynając od obwodu 1. Kiedy osiągnie on instrukcję MEND, CPU wykona diagnostykę
i uaktywni odpowiednie wyjścia, a następnie powtórzy skanowanie programu.
Sterowniki programowalne PLC
27
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
4. Przykłady prostych aplikacji
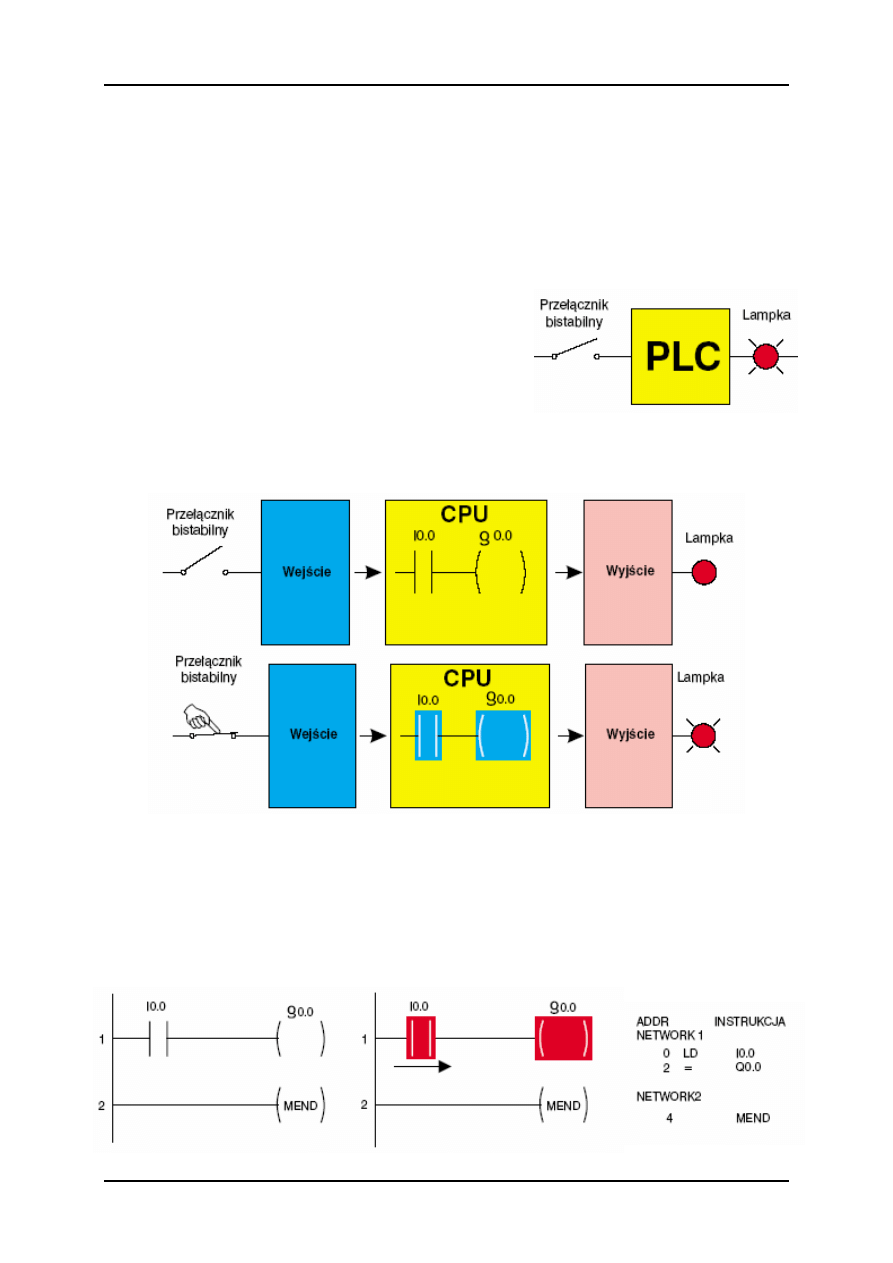
- Włącznik. Aby wyjaśnić działanie sterownika programowalnego, wykorzystany zostanie
prosty układ z lampką i ręcznym przełącznikiem. W przykładzie przedstawionym na rysunku
lampka jest wyłączona, jeśli przełącznik jest otwarty, a zapalona, kiedy przełącznik jest
zamknięty.
Aby zrealizować to zadanie, przełącznik można
podłączyć do wejścia PLC pomiędzy zacisk wejściowy
I0.0, a 24VDC zasilania PLC. Natomiast lampkę należy
podłączyć do zacisku wyjściowego Q0.0 i 24 VDC
PLC.
Na rysunkach poniżej przedstawiono obsługiwaną przez sterownik sekwencję zdarzeń.
Przełącznik podłączony jest do modułu wejściowego PLC. Lampka podłączona jest do
modułu wyjściowego. Sterownik CPU nieustannie sprawdza stany wejść. Kiedy wykryje
otwarty przełącznik na wejściu I0.0, ustawia na wyjściu Q0.0 logiczne „0”. Lampka pozostaje
wyłączona. Po wciśnięciu przełącznika na wyjściu Q0.0 pojawia się logiczna „1”, zapalająca
żarówkę. Program pracy sterownika w postaci graficznej i listingów przedstawiony jest na
rysunkach poniżej.
Sterowniki programowalne PLC
28
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
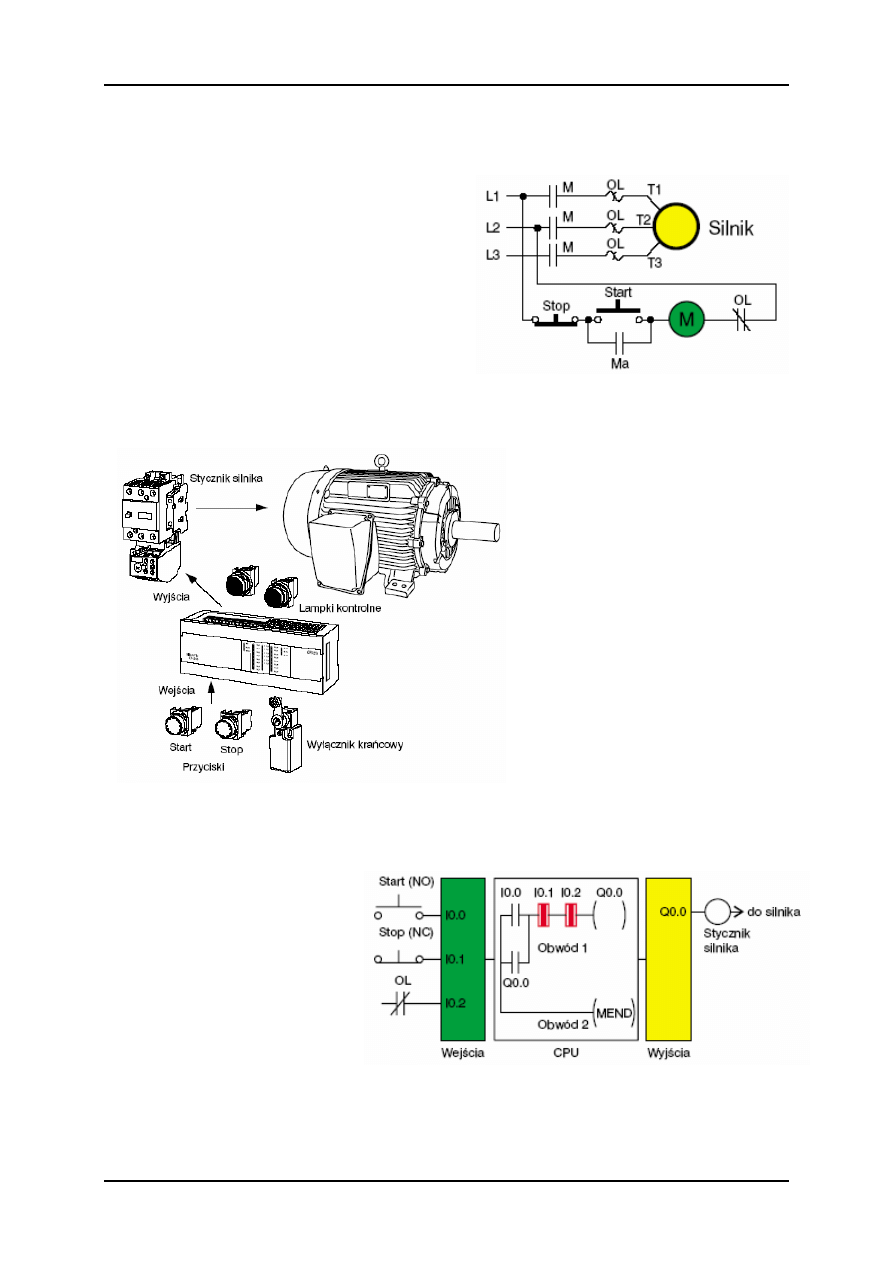
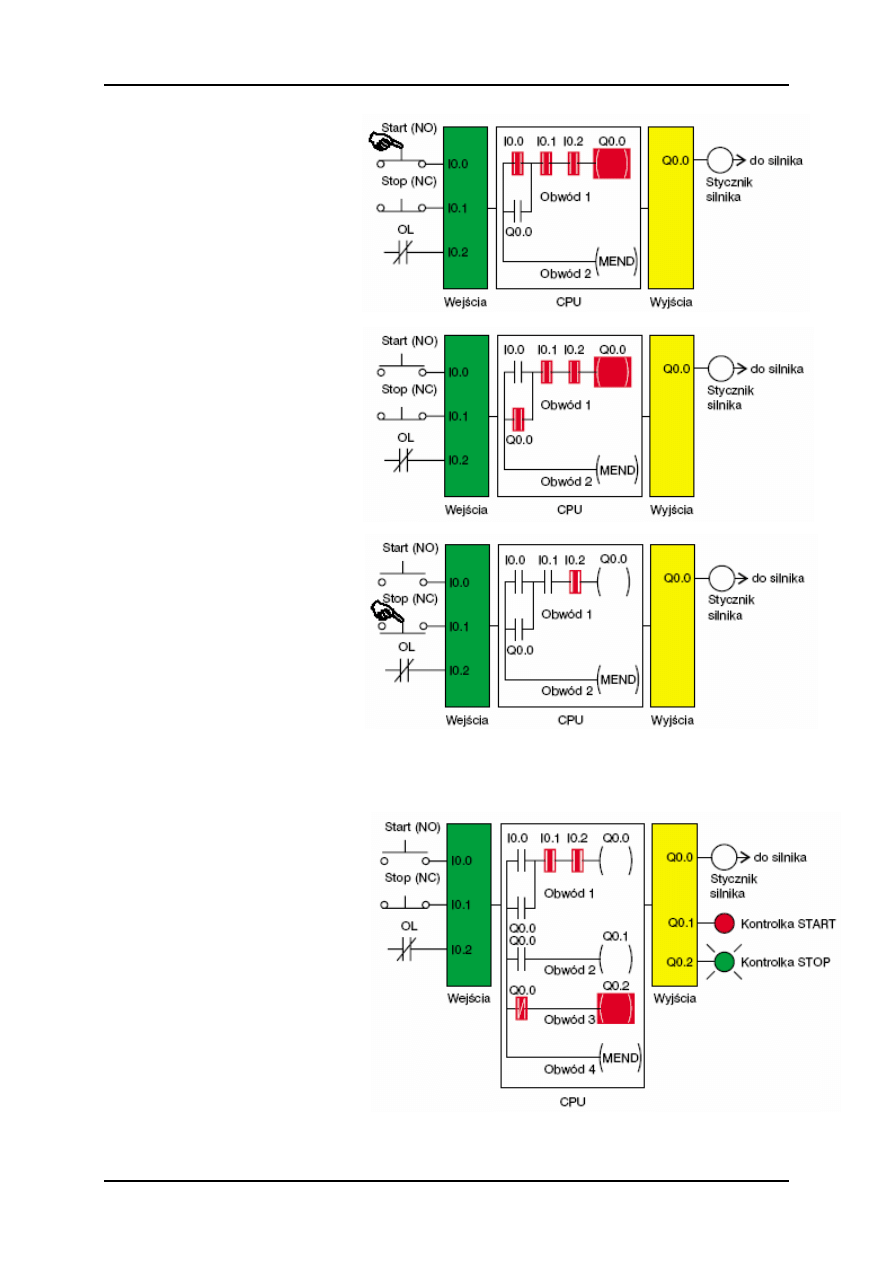
- Starter silnika. Kolejny, nieco bardziej zaawansowany, przykład wykorzystania
sterownika, to układ uruchamiający i zatrzymujący silnik elektryczny. Schemat
przedstawiony na rysunku ilustruje, jak
standardowo steruje się pracą silnika za pomocą
dwóch przycisków. Starter silnika M jest
włączony szeregowo z normalnie otwartym
przyciskiem Start, normalnie zamkniętym
przyciskiem Stop i normalnie zamkniętymi
stykami przekaźnika przeciążeniowego OL.
Chwilowe wciśnięcie przycisku Start zamyka
obwód przepływu prądu i pobudza stycznik
silnika M. Załączone zostają styki główne M i
styki pomocnicze Ma (pomocnicze styki umieszczone w obwodzie podtrzymania). Kiedy
przycisk Start zostanie zwolniony, podtrzymanie zasila cewkę stycznika M poprzez styki
pomocnicze Ma. Silnik będzie pracował do momentu, kiedy normalnie zamknięty przycisk
Stop
zostanie wciśnięty lub
przekaźnik przeciążeniowy otworzy
styki OL przerywając obwód
przepływu prądu do stycznika M.
Realizacja sterowania z
wykorzystaniem sterownika PLC
wygląda następująco: normalnie
otwarty przycisk Start podłączony
jest do 1 wejścia (I0.0), normalnie
zamknięty przycisk Stop podłączony
jest do 2 wejścia (I0.1) oraz
normalnie zamknięty styk
przekaźnika przeciążeniowego
(ochrona silnika)
podłączony jest do
3 wejścia (I0.2).
Wejście 1 (I0.0), wejście 2 (I0.1) i wejście 3 (I0.2) są połączone w układ realizujący funkcję
AND i są wykorzystane do sterowania wyjściem Q0.0. Stan wejścia I0.1 jest logiczną „1”,
ponieważ normalnie zamknięty
przycisk Stop (NC) jest
zamknięty. Stan I0.2 jest logiczną
„1”, ponieważ normalnie
zamknięte (NC) styki
przekaźnika przeciążeniowego są
zamknięte. Dodatkowo,
równolegle do styku I0.0
podłączony jest styk Q0.0
symbolizujący stan wyjścia, do
którego podłączony jest silnik.
Stanowi on obwód podtrzymania.
Sterowniki programowalne PLC
29
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
Kiedy przycisk Start zostaje
wciśnięty, CPU odbiera logiczną
„1”z wejścia 1 (I0.0). Wszystkie
trzy wejścia są teraz logicznymi
„1”. CPU wysyła logiczną „1” do
wyjścia 1 (Q0.0). Stycznik
silnika zostaje pobudzony i silnik
uruchamia się.
Kiedy przycisk Start zostanie
wciśnięty, stan wyjścia 1 (Q0.0)
równa się „1” i w następnym
obiegu normalnie otwarty styk
Q0.0 będzie zamknięty, przez co
wyjście Q0.0 pozostanie
załączone, nawet jeśli przycisk
Start zostanie zwolniony.
Silnik będzie kontynuował pracę
do momentu wciśnięcia
przycisku Stop. Wejście 2 (I0.1)
będzie teraz logicznym „0”. CPU
wyśle „0” do wyjścia 1 (Q0.0).
Silnik się wyłączy. Kiedy
przycisk
Stop
zostanie
zwolniony, funkcja logiczna I0.1
ponownie będzie prawdą i obwód
będzie gotowy do ponownego
uruchomienia silnika przyciskiem
Start.
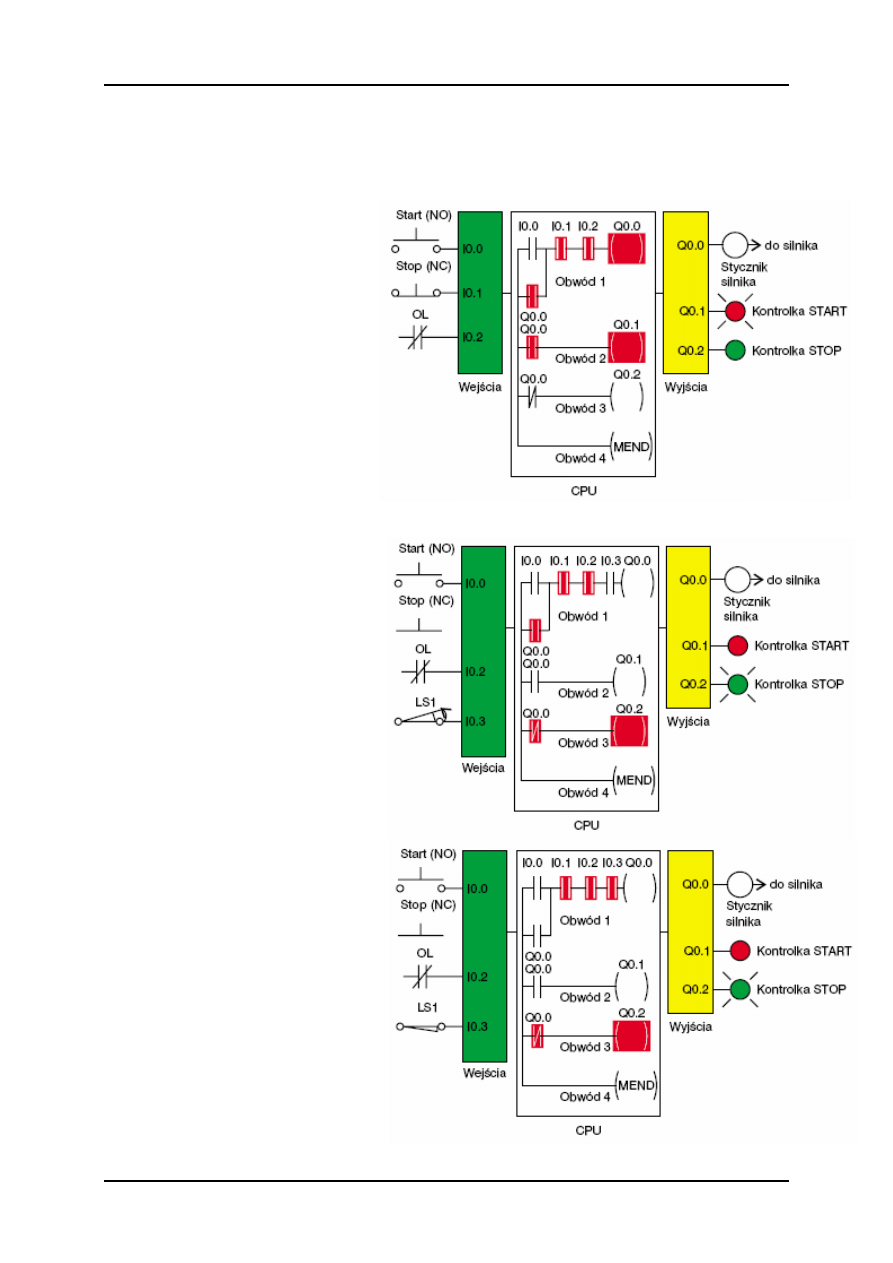
Rozszerzenie aplikacji o lampki kontrolne
Prezentowana aplikacja może
być łatwo rozszerzona, np.:
poprzez dodanie lampek
kontrolnych dla warunków
START i STOP. W tym
przykładzie lampka wskaźnika
START podłączona jest do
wyjścia 2 (Q0.1), a lampka
wskaźnika STOP do wyjścia 3
(Q0.2). Normalnie otwarte Q0.0
(wyjście 1) podłączone jest w
obwodzie 2 do wyjścia 2 (Q0.1),
a normalnie zamknięty styk Q0.0
podłączony jest do wyjścia 3
(Q0.2) w obwodzie 3.
Sterowniki programowalne PLC
30
Zespół Szkół Ponadgimnazjalnych Nr 3 im. Stanisława Staszica w Krośnie ©
Grzegorz Kuźniarowicz
W stanie Stop wyjście 1 (Q0.0) jest otwarte. Normalnie otwarte styki Q0.0 w obwodzie 2 są
otwarte, a lampka START podłączona do wyjścia 2 (Q0.1) jest wyłączona. Normalnie
zamknięty styk Q0.0 w sieci 3 jest zamknięty, a lampka STOP podłączona do wyjścia 3
(Q0.2) świeci się.
W momencie uruchomienia silnika
przez PLC, wyjście 1 (Q0.0) jest
w wysokim stanie logicznym.
Normalnie otwarte styki Q0.0 w
obwodzie 2 są teraz przełączone
na logiczną „1” (zamknięte) i
wyjście 2 (Q0.1) załącza lampkę
START. Normalnie zamknięte
styki Q0.0 w obwodzie 3
przełączają się na logiczne „0”
(otwarte), a lampka wskaźnika
STOP podłączona do wyjścia 3
(Q0.2) jest teraz wyłączona.
Rozszerzenie aplikacji o wyłącznik krańcowy
Aplikacja może być dalej
rozszerzana przez dodanie
wyłącznika krańcowego LS1 z
normalnie otwartymi stykami do
wejścia 4 (I0.3), który może służyć
do zatrzymania lub zabezpieczenia
silnika przed przypadkowym
uruchomieniem (osłona silnika lub
jego dodatkowe wyposażenie mogą
być kontrolowane przez wyłącznik).
Jeśli osłona zostanie otwarta, to
normalnie otwarte styki LS1 zostaną
otwarte i silnik nie będzie mógł być
uruchomiony.
Kiedy osłona zostanie zamknięta,
styki wyłącznika LS1 zamkną się,
wejście 4 (I0.3) zostanie ustawione
na „1” i silnik będzie mógł być
uruchomiony przyciskiem Start.
Program może być rozbudowywany
o wiele dodatkowych zastosowań
komercyjnych i przemysłowych,
które ograniczone są tylko przez
liczbę wejść/ wyjść i wielkość
dostępnej pamięci sterownika PLC.
Wyszukiwarka
Podobne podstrony:
sterowniki+programowalne+plc%2c+cz%ea%9c%e6+5
Sterowniki programowalne PLC Siemens(1)
Sterowniki programowalne PLC Siemens
PROGRAMOWALNE STEROWNIKI LOGICZNE PLC
Programowanie sterownikow przemyslowych PLC J Kasprzyk
programowanie plc 793
procedury regulacyjne sterownikow programowalnych
Sterowniki program w ukł automatyki
Sterownik programowalny, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, AUTOMA
więcej podobnych podstron