Podstawy Automatyki i Robotyki - sprawozdanie
Temat: Robot IRB 1400
02.10.2013 r.
Bartosz Zawadzki (201066) Śr/TP
9:00-11:00
Prowadzący: Dr inż. Wojciech
Muszyński
1. Informacje o robocie IRB 1400
Robot IRB 1400 jest robotem przemysłowym, wyprodukowanym przez firmę ABB. Posiada on
sześć osi. Konstrukcja IRB 1400 jest kompaktowa, cechuje ją wąski przegub. Robot posiada otwartą
strukturę, co znacznie zwiększa elastyczność jego zastosowań. Potrafi również komunikować się z
innymi, zewnętrznymi systemami. Podobnie, jak w przypadku pozostałych robotów z serii IRB, model
1400 jest sterowany przez oprogramowanie BaseWare OS, odpowiedzialne za nadzór ruchu,
komunikację programów oraz wykonywanie i wywoływanie aplikacji.
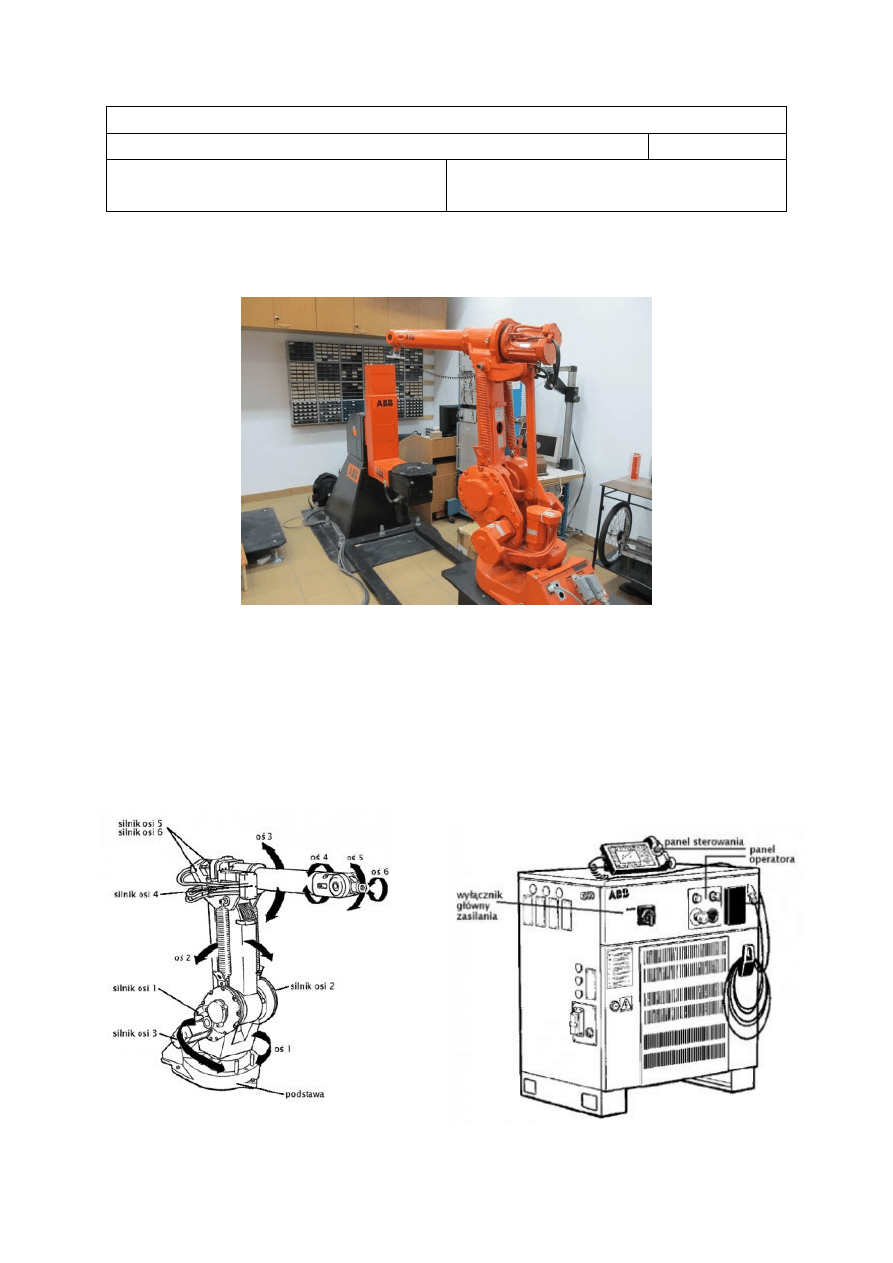
Robot składa się z 3 podstawowych elementów: a) manipulatora – ramienia, b) szafy
sterowniczej c) pulpitu sterowania. Dodatkowo w laboratorium znajduje się również urządzenie
dodatkowe: pozycjoner automatyczny 2-osiowy
Ramię robota
Maszynę charakteryzuje duża przestrzeń robocza i zasięg, wynoszący 1440 mm. Typowy
udźwig robota to 5 kg, jednak może on być zwiększony do 18 kg(po zainstalowaniu odpowiedniego
wyposażenia na górnym ramieniu, np. podajnika drutu spawarki, wyspy zaworowe automatycznego
oprzyrządowania). Robot posiada solidną i sztywna konstrukcję, dzięki której zapewnia dosyć niski
poziom emisji hałasu, długi czas bezawaryjnego użytkowania oraz długie odstępy pomiędzy
przeglądami serwisowymi.
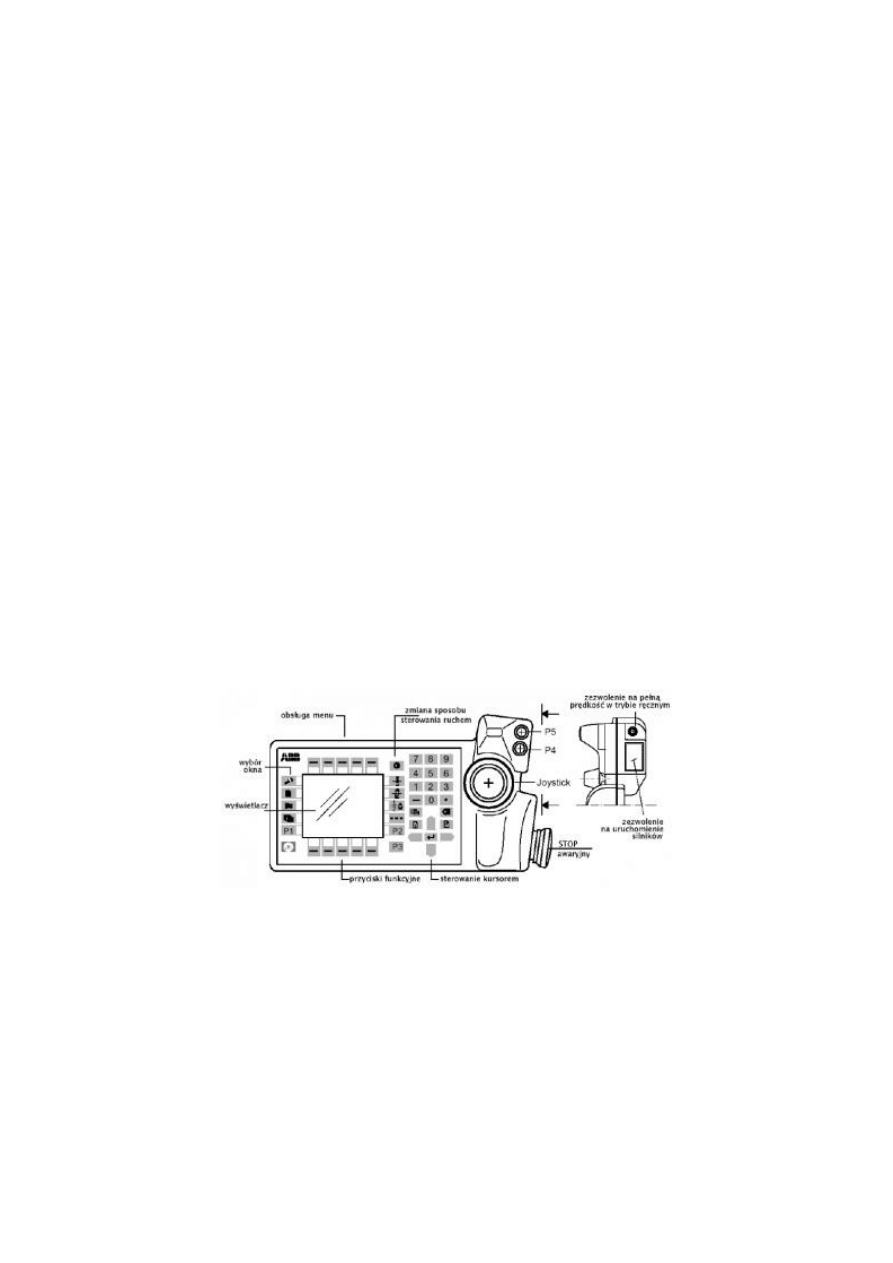
Sterowanie robotem odbywa się za pomocą przenośnego panelu sterowania, zapewniającego
wygodną pracę podczas sterowania i programowania. IRB 1400 może pracować w dwóch trybach –
automatycznym oraz ręcznym. W trybie ręcznym, do sterowania wykorzystuje się joystick.
Sterowanie robotem może odbywać się za pomocą współrzędnych zewnętrznych(współrzędne
zadawane są osobno, sterowanie położeniem lub orientacją efektora) lub wewnętrznych(pozycja
ustalana osobno dla każdej osi). Robot może być programowany zarówno w trybie on-line jak i off-
line, w języku wysokiego poziomu Rapid. Program napisany przy użyciu zewnętrznego komputera
może być wczytany przez sterownik ze standardowego
dysku 3.5”/1.44MB. Język Rapid posiada bogaty zestaw instrukcji ruchu. Istnieje możliwość
programowego sterowania zarówno we współrzędnych wewnętrznych jak i zewnętrznych
Programowanie online polega na uczeniu robota kolejnych czynności poprzez
wydawanie poleceń i zapisywanie ich w języku napisanym dla robota, znajomość języka nie jest
konieczna do programowania, gdyż większość poleceń jest „wybieralna” z menu pulpitu
sterowniczego. IRB-6 może być tez sterowany w czasie rzeczywistym, tzn. można manipulować
ramieniem bez zapisywania i uczenia robota, za pomocą manipulatora znajdującego się na pulpicie i
przełączników osi.
Programowanie offline wymaga znajomości języka używanego przez robota i programu
umożliwiającego pisanie w tym języku zainstalowanego na komputerze klasy PC. Zapisany
program jest przenoszony do robota za pomocą dyskietki, której napęd znajduje się w szafie
sterowniczej.
Panel sterowania robota
2. Dane techniczne
Model – IRB 1400
Producent – ABB

Wymiary 1025mm x 680mm x 440mm
Waga – 250kg
Udźwig – 5kg (rozszerzalny do 18 kg)
Maksymalny zasięg manipulatora – 1440mm
Precyzja ±0,05mm
Ruchliwość – 6 stopni swobody
Manewrowość – 0
Prędkość pracy manipulatora 250 m/s
Oprogramowanie – BaseWare OS
Typ mocowania –podłogowe
3. Chwytaki
Podział chwytaków:
a) ze względu na realizowany sposób chwytania
- siłowe(siły naprężające i przyciągające)
- kształtowe
- siłowo kształtowe
b) ze względu na zasadnicze różnice w budowie
- ze sztywnymi końcówkami chwytnymi
- ze sprężystymi końcówkami chwytnymi
- z elastycznymi końcówkami chwytnymi
- adhezyjne (podciśnieniowe, magnetyczne)
- specjalne urządzenia chwytające
c) ze względu na napęd
- mechaniczne
- pneumatyczne
d) ze względu na ilość szczęk
- dwuszczękowe równoległe, kątowe ub promieniowe
- trójszczękowe
- wieloszczękowe
Chwytak jest to niezbędne wyposażenie maszyny manipulacyjnej wykonującej zadania
transportowe, które składają się z 3 podstawowych czynności:
• uchwycenie manipulowanego przedmiotu,
• utrzymanie przedmiotu podczas przenoszenia,
• pozostawienie przedmiotu we właściwej orientacji na miejscu przeznaczenia.
Chwytak nakłada na obiekt tyle ograniczeń swobody ile jest potrzebne do
przetransportowania przedmiotu na miejsce przeznaczenia. Ogromna różnorodność
obiektów manipulacji sprawia, że chwytaki są najbardziej zróżnicowaną grupą konstrukcyjną
w robotyce
Bibliografia:
http://pl.wikipedia.org/wiki/Chwytak_(robotyka)
Wyszukiwarka
Podobne podstrony:
Bartosz Zawadzki 201066 cz 1
Bartosz Zawadzki 201066 cz 2
13 11 Zawadzki 201066
Chramiec Bartosik, KARTA AC SPRAWKO
Bartoszu, patriotyczne teksty i podkłady
Chemia1, wrzucaj co ci zawadza na kompie
Bartoszek 35 44 id 80431 Nieznany
Lzy Watykanu - rozmowa z Tadeuszem Bartosiem, ஜஜCiemna strona historii chrześcijaństwa
asertywność w życiu człowieka, materiały od Bartosza Wróblewskiego, emocje
wydrukuj na 16.12.2014, wrzucaj co ci zawadza na kompie
Bartoszewski przeciw Centrum Steinbach
Jobs, wrzucaj co ci zawadza na kompie
wydrukuj na jutro(1), wrzucaj co ci zawadza na kompie
h.socjologii - bartoszek Us, Zagadnienia do egzaminu z Historii socjologii:
PL Bartoszewicki M , Spółdzielnia 23 PAL z Będzina i jej monety, Grosz 94, 7 9 2003
Bartosiak Kulturowy horyzont teatru
Zagadnienie 17 Bartoszewicz
więcej podobnych podstron