Do czego to służy?
Przed kilkoma miesiącami jeden z Czy−
telników zwrócił się z gorącą prośbą o za−
prezentowanie w
EdW sterownika
„biegnącego światełka” do samochodo−
wych świateł stopu. Po naciśnięciu ha−
mulca, lampki (diody lub żarówki) zapala−
łyby się kolejno i pozostawałyby zapalone
aż do zwolnienia pedału hamulca.
Taki układ można zrobić bardzo prosto
za pomocą kilkustopniowego rejestru
przesuwnego i generatora. Od takiego
rozwiązania tylko jeden krok do układu
mającego dużo większe możliwości.
Właśnie taki układ: prosty i jednocześ−
nie wielofunkcyjny opisany jest w niniej−
szym artykule. Z jego pomocą można zre−
alizować nie tylko stopniowo zapalającą
się „linijkę światła stop”, ale również róż−
nego rodzaju sterowniki reklam czy napi−
sów informacyjnych.
Urządzenie może na przykład zostać
wykorzystane do sterowania zespołu
diod LED tworzących numer domu.
Jak to działa?
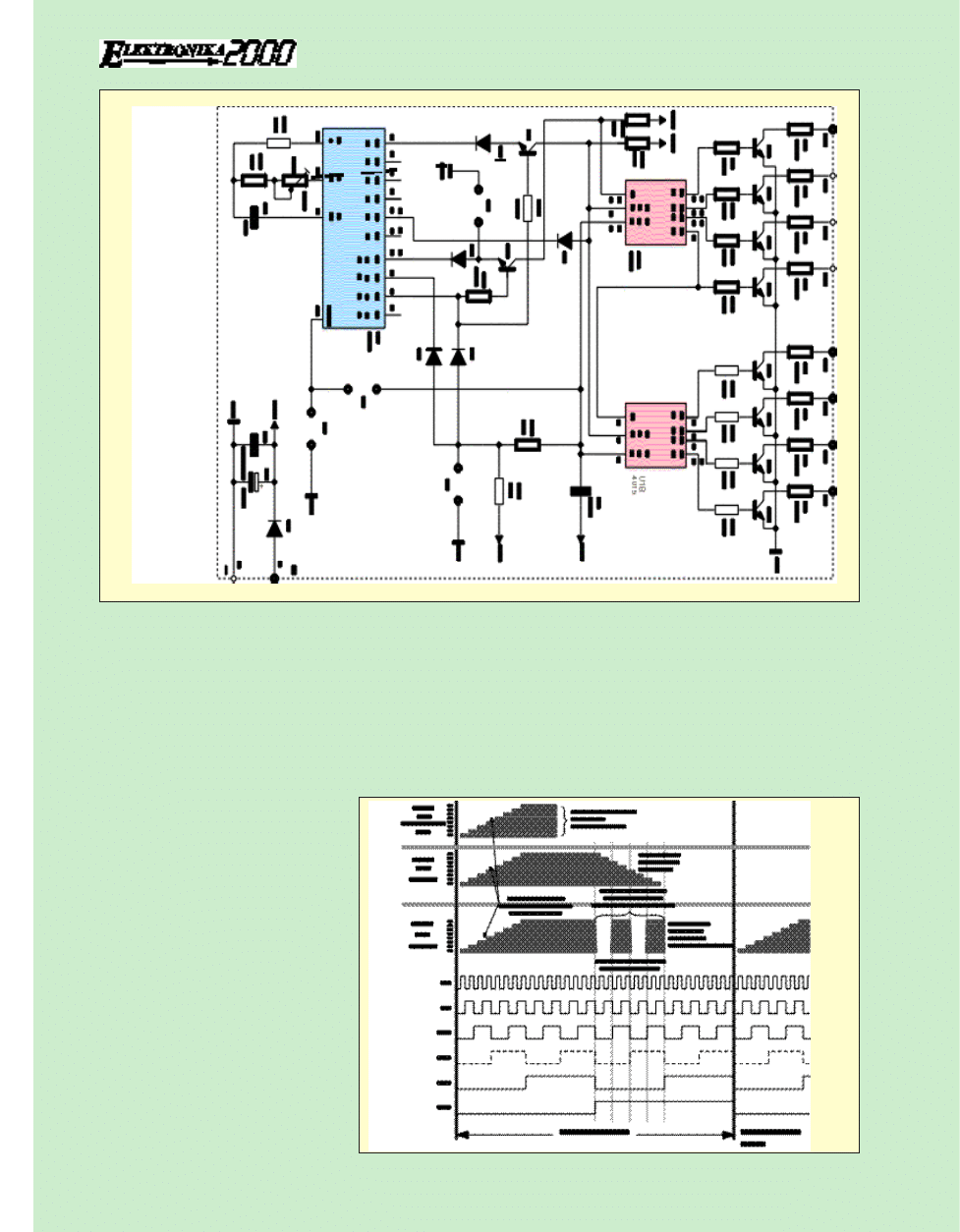
Schemat ideowy układu pokazano na
rry
ys
su
un
nk
ku
u 1
1.
Kluczowym blokiem jest ośmiobitowy
rejestr przesuwny zbudowany z układem
U1 (CMOS 4015).
W najprostszym zastosowaniu w roli
„linijki światła stop”, po podaniu napięcia
zasilającego oba czterobitowe rejestry są
zerowane dzięki obwodowi C1 R19 (przy
czym zwora ZC jest zwarta). Ponieważ
zwarta jest też zwora ZA, wyzerowany
zostaje także licznik U2 (CMOS 4060). Po
wyzerowaniu na wszystkich wyjściach
rejestru występuje stan niski, wskutek
czego tranzystory T1...T8 nie przewodzą
i lampki L1...L8 (nie zaznaczone na sche−
macie) dołączone między plus zasilania
i punkty P1...P8 są wygaszone. Następ−
nie impulsy z wyjścia Q8 licznika U2 po−
wodują wpisywanie do kolejnych stopni
rejestru U1 stanu wysokiego, otwierają
się kolejne tranzystory począwszy od T1
i wspomniane lampki kolejno się zapala−
ją. Szybkość zaświecania się linijki jest re−
gulowana potencjometrem PR1 w obwo−
dzie oscylatora licznika U2.
Po zliczeniu ośmiu impulsów z wyjścia
Q8 licznika U2 zaświecają się wszystkie
lampki. Lampki pozostają zaświecone,
choć licznik U2 nadal pracuje, ponieważ
przez cały ten czas na wejście informacyj−
ne D rejestru U1 (nóżka 15) wpisywany
jest stan wysoki.
Jak widać, w takim trybie pracy niepo−
trzebne są diody D1, D2, D3, D4, D5,
tranzystory T9, T10 i współpracujące z ni−
mi rezystory, bo na nóżkę 15 kostki U1A
cały czas ma być podawany stan wysoki,
a wyjście Q8 kostki U2 ma być bezpo−
średnio połączone z wejściami zegarowy−
mi obu połówek rejestru.
Dodatkowe elementy D1−D5, T9, T10
umożliwiają uzyskanie wielu interesują−
cych efektów.
Na rry
ys
su
un
nk
ku
u 2
2 pokazano trzy różne
efekty i odpowiadające im przebiegi.
Analiza działania obwodu z elemen−
tami D1−D5, T9, T10, R20, R21, R24
nie jest konieczna – początkujący wca−
le nie muszą rozumieć jak on pracuje –
dla uzyskania jednego z trzech pokaza−
nych efektów wystarczy, że zamontują
potrzebne elementy i wykonają odpo−
wiednie zwory. Oto szczegółowe
wskazówki.
E
EF
FE
EK
KT
T N
NR
R 1
1 –
– lliin
niijjk
ka
a ś
św
wiia
atte
ełł s
stto
op
p. Nie
montować elementów R20, R21, R24,
D2−D5, T9, T10. Wlutować zwory ZA
oraz ZC.
E
EF
FE
EK
KT
T N
NR
R 2
2 – rre
ek
klla
am
ma
a. Nie montować
R20, R24, D2−D5, T9. Wykonać zwory
ZA, ZC oraz ZD.
E
EF
FE
EK
KT
T N
NR
R 3
3 – rre
ek
klla
am
ma
a. Montować
wszystkie elementy. Wykonać tylko
zworę ZB.
E
EF
FE
EK
KT
T N
NR
R 4
4 – rre
ek
klla
am
ma
a. Nie montować
R20, R24, D2, D4, D5, T9. Wykonać
zwory ZA oraz ZC.
Bardziej zaawansowani Czytelnicy po−
winni bardzo uważnie przeanalizować
działanie układu, ponieważ oprócz propo−
nowanych czterech możliwości, w stosun−
kowo prosty sposób można uzyskać wiele
innych, bardzo efektownych sekwencji.
Będzie to wymagało przede wszystkim
zrozumienia roli poszczególnych elemen−
tów, a potem przecięcia niektórych ście−
żek i wykonania nowych połączeń.
Poza tym, z analizy układu można się
nauczyć pewnych „chwytów”, pozwala−
jących za pomocą kilku tranzystorów
i diod budować układy spełniające okreś−
lone funkcje logiczne.
Szczegółowej analizy Czytelnicy doko−
nają sami, biorąc pod uwagę powyższe
wskazówki dotyczące poszczególnych
wersji. Przy analizie rysunku 2 należy pa−
miętać, że dane w rejestrze są przesuwa−
ne w momencie wystąpienia narastające−
go zbocza na wejściach zegarowych re−
jestru (nóżki 1 i 9 kostki U1), natomiast
stany kolejnych wyjść licznika U2 zmie−
niają się podczas opadającego zbocza na
poprzednim wyjściu
Na rysunku 2 pokazano kolejność za−
świecenia i gaśnięcia lamp dla efektów
1...3. Także efekt nr 4 jest bardzo interesu−
jący, warto go wypróbować w praktyce.
Montaż i uruchomienie
Układ można zmontować na płytce po−
kazanej na rry
ys
su
un
nk
ku
u 3
3. Montaż nie sprawi
trudności, bo płytka jest dość duża, a ele−
menty są rozmieszczone luźno.
53
E
LEKTRONIKA DLA WSZYSTKICH 9/98
Uniwersalny sterownik
reklamy świetlnej
2281
W zależności od potrzebnego efektu
należy zamontować potrzebne elementy
i wykonać zwory według wskazówek po−
danych wcześniej.
Przy próbach modelu okazało się, że
przy podanych na schemacie i w wykazie
wartościach elementów oscylatora (PR1,
R22, R23, C2) uzyskuje się bardzo szero−
ki, zupełnie wystarczający w praktyce za−
kres zmian szybkości zaświecania i gaś−
nięcia lamp. Kto chciałby przeprowadzić
eksperymenty przy innych szybkościach,
może zmieniać pojemność C2 w szero−
kim zakresie 1nF...220nF.
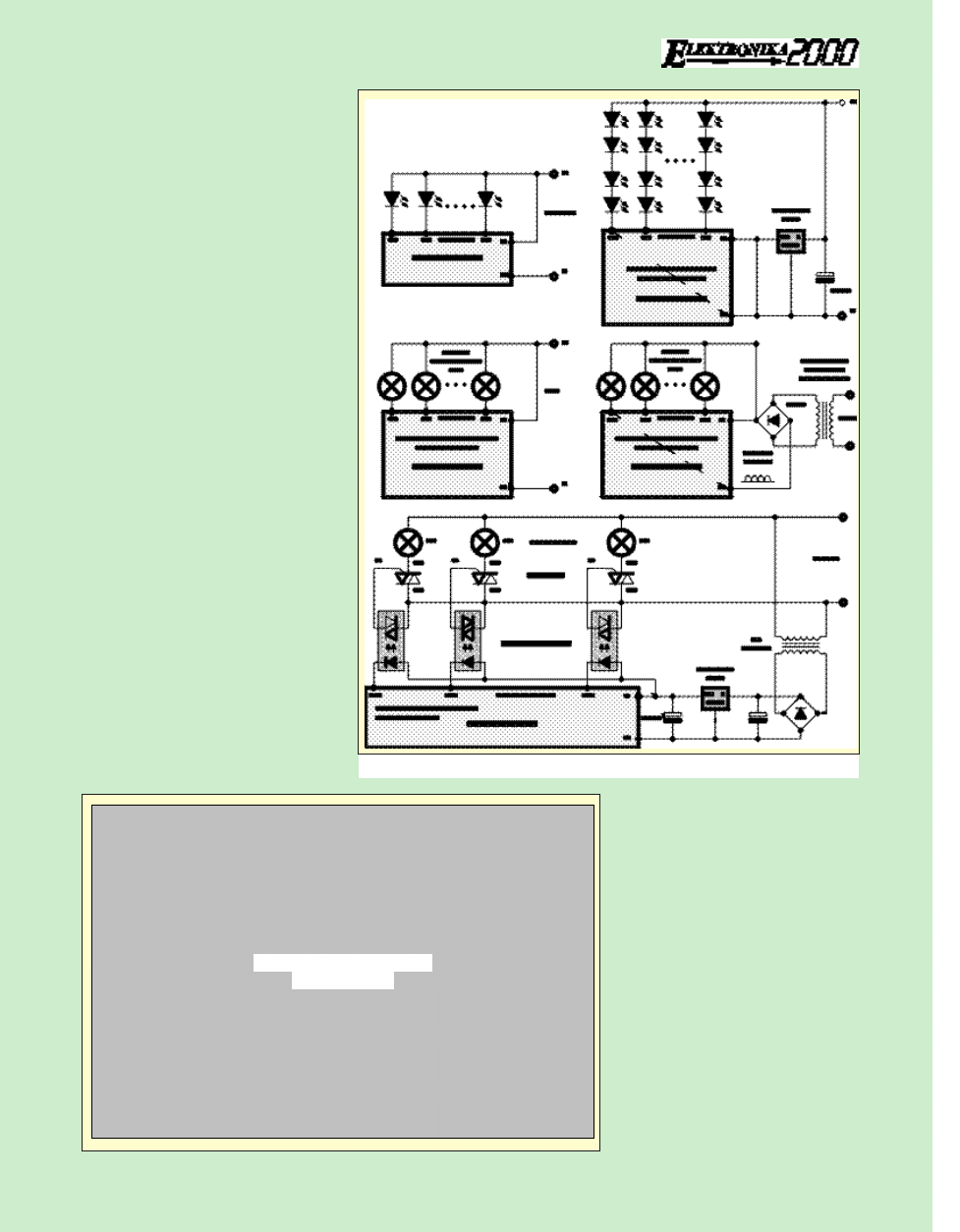
W układzie modelowym pokazanym
na fotografii w roli lamp zastosowano
osiem pojedynczych diod LED. Taki
układ połączeń pokazany jest na rry
ys
su
un
n−
k
ku
u 4
4a
a. Zamiast pojedynczej diody
w układzie z rysunku 4a warto zastoso−
wać kilka LED−ów połączonych szerego−
wo (do 5 diod czerwonych, albo do
4 diod żółtych lub zielonych). Pozwoli to
uzyskać kilkakrotnie więcej światła przy
takim samym poborze prądu. W takim
wypadku, żeby utrzymać potrzebną
wartość prądu, trzeba odpowiednio
zmniejszyć rezystancje R1...R8. W ze−
stawie AVT−2281 przewidziane są tran−
zystory wykonawcze T1...T8 typu
BC548 lub podobne, a rezystory R1...R8
mają wartość 330
Ω
. Daje to w układzie
z rysunku 4a przy zasilaniu 12Vprąd jed−
nej diody około 30mA.
Innym sposobem jest wykorzystanie
napięcia stałego o większej wartości.
W tym przypadku potrzebny będzie do−
datkowy stabilizator, a nie trzeba monto−
wać diody D6 w sterowniku. Układ poka−
zany jest na rry
ys
su
un
nk
ku
u 4
4b
b. Dodatkowy kon−
densator (10µF/40V) umieszczony blisko
wejścia stabilizatora potrzebny jest tylko
dla uniknięcia wzbudzania stabilizatora.
Liczbę diod, oraz rezystancje R1...R8 na−
leży wtedy dobrać w zależności od napię−
cia zasilającego, by nie przekroczyć mak−
symalnego prądu diod, wynoszącego
30...50mA.
E
LEKTRONIKA DLA WSZYSTKICH 9/98
54
R
Ry
ys
s.. 1
1.. S
Sc
ch
he
em
ma
att iid
de
eo
ow
wy
y
R
Ry
ys
s.. 2
2.. P
Prrzze
eb
biie
eg
gii w
w u
uk
kłła
ad
dzziie
e
55
E
LEKTRONIKA DLA WSZYSTKICH 9/98
Kto chciałby pracować przy większych
prądach i na przykład wykorzystać żarówki,
może zastosować tranzystory dużej mocy.
Płytka jest przystosowana do zamontowa−
nia zarówno tranzystorów małej mocy, jak
i tranzystorów mocy w obudowach TO−
220. Przy wykorzystaniu tranzystorów mo−
cy, z uwagi na prąd bazy wyznaczony przez
rezystory R9...R16 należy zastosować albo
tranzystory Darlingtona, albo jeszcze lepiej
MOSFET−y mocy (np. BUZ10...11). Przy
stosowaniu
MOSFET−ów,
rezystory
R9...R16 można zastąpić zworami.
Sposoby
sterowania
żarówkami
i większą liczbą diod LED pokazane są na
rry
ys
su
un
nk
ku
u 4
4c
c i 4
4d
d. Do zasilania można wy−
korzystać napięcie stałe (niekoniecznie
filtrowane i stabilizowane) o wartości
6...18V. Jak pokazano na rysunku 4d, ża−
rówki mogą być zasilane napięciem tęt−
niącym wprost z mostka prostownicze−
go, bez kondensatorów filtrujących. Jest
to możliwe dzięki obecności w sterowni−
ku diody D6 i kondensatorów C3, C4.
W takim przypadku dla pewności należy
zwiększyć wartość pojemności C3 do
470µF lub 1000µF.
Przy sterowaniu żarówek napięciem
zmiennym 220V wg rysunku 4e, koniecz−
nie należy zachować wszelkie przepisy
bezpieczeństwa wymagane w urządze−
niach zasilanych napięciem sieci energe−
tycznej – wersja ta nie jest przeznaczona
dla młodych, niedoświadczonych Czytel−
ników. W roli optotriaków należy zastoso−
wać wersję z obwodem włączania przy
napięciu sieci bliskim zeru, np. MOC3041.
P
Piio
ottrr G
Gó
órre
ec
ck
kii
Z
Zb
biig
gn
niie
ew
w O
Orrłło
ow
ws
sk
kii
PostScript Picture
AVT2281
R
Ry
ys
s.. 3
3.. S
Sc
ch
he
em
ma
att m
mo
on
ntta
ażżo
ow
wy
y
K
Ko
om
mp
plle
ett p
po
od
dzze
es
sp
po
ołłó
ów
w zz p
płły
yttk
ką
ą jje
es
stt
d
do
os
sttę
ęp
pn
ny
y w
w s
siie
ec
cii h
ha
an
nd
dllo
ow
we
ejj A
AV
VT
T jja
ak
ko
o
„
„k
kiitt s
szzk
ko
olln
ny
y”
” A
AV
VT
T−2
22
28
81
1..
W
Wy
yk
ka
azz e
elle
em
me
en
nttó
ów
w
R
Re
ezzy
ys
stto
orry
y
R1−R8: 330
Ω
R9−R16: 3,3k
Ω
R17,R18,R22−R24: 10k
Ω
R19: 22k
Ω
R20,R21: 100k
Ω
PR1: PR 100k
Ω
miniaturowy
K
Ko
on
nd
de
en
ns
sa
atto
orry
y
C1: 100nF
C2: 10nF
C3: 220µF/25V
C4: 100nF ceramiczny
P
Pó
ółłp
prrzze
ew
wo
od
dn
niik
kii
D1−D5: dioda 0,2A np.4148
D6: dioda 1A np.4001
T1−T10: NPN np.BC548B
U1: 4015
U2: 4060
P
P
o
ozzo
os
stta
ałłe
e
ARK−2: 1szt.
podst. pod ukł. scalone
R
Ry
ys
s.. 4
4.. D
Do
ołłą
ąc
czze
en
niie
e rró
óżżn
ny
yc
ch
h e
elle
em
me
en
nttó
ów
w w
wy
yk
ko
on
na
aw
wc
czzy
yc
ch
h
Do czego to służy?
Chciałbym zaproponować Czytelni−
kom EdW budowę prostego, lecz bardzo
użytecznego układu. Dość często spoty−
kamy się z problemem stabilizacji tempe−
ratury w określonych pomieszczeniach.
Przy obecnym stanie elektroniki zbudo−
wanie układu stabilizującego temperatu−
rę z praktycznie dowolną dokładnością
nie jest najmniejszym problemem i ukła−
dów takich opisano już w publikacjach
przeznaczonych dla hobbystów bardzo
wiele. Znalazły one zastosowanie w nad−
zorowaniu temperatury pomieszczeń
mieszkalnych czy zakładach pracy. Może−
my za ich pomocą utrzymywać stałą tem−
peraturę w akwariach z rybkami czy też
pilnować stałych warunków obróbki ma−
teriałów fotograficznych. Zakres regulo−
wanych temperatur bywa różny i zależy
głównie od typu zastosowanego czujnika
temperatury.
Wyobraźmy sobie teraz, że w intere−
sującym nas pomieszczeniu zainstalo−
wane jest ogrzewanie elektryczne, pra−
cujące jako główne lub pomocnicze
źródło ciepła. Z pomieszczenia korzysta−
my tylko przez krótkie okresy, powiedz−
my przez kilka godzin dziennie, ale za−
wsze o stałej porze. W pomieszczeniu
jest zimno, centralne ogrzewanie „nie
wyrabia” i zainstalowaliśmy w nim pie−
cyk elektryczny z termostatem. Ponie−
waż jesteśmy wyjątkowymi zmarzlucha−
mi, ustawiliśmy temperaturę na 24°C.
Zastosowany piecyk ma moc 4000W.
Możemy teraz zdradzić tajemnicę, że
pomieszczeniem, w którym musimy za−
chować duży komfort cieplny jest łazien−
ka. Korzystamy z niej zawsze rano, po−
między godziną 7 a 7.30 i wieczorem,
około godziny 23. Łatwo więc policzyć,
że pracujący bez przerw piecyk zużywa
ok. 88kWh w ciągu doby. Nie mam poję−
cia, ile obecnie kosztuje jedna kilowato−
godzina energii elektrycznej, ale z pew−
nością pieniądze zainwestowane w bu−
dowę proponowanego układu zwrócą
się po bardzo krótkim czasie. Ktoś z Czy−
telników
być
może
zaprotestuje:
„Przecież można piecyk wyłączać ręcz−
nie, po każdorazowym skorzystaniu z ła−
zienki!”. Owszem można, ale trzeba go
także ręcznie włączać, a wchodzenie do
wychłodzonej łazienki, a następnie cze−
kanie aż zostanie nagrzana do odpo−
wiedniej temperatury nie należy do przy−
jemności!
Przykład z łazienką był tylko jednym
z wielu możliwych zastosowań propono−
wanego układu. Równie dobrze można
go zastosować do termostatowania ak−
warium z rybkami czy pomieszczenia fir−
my, którego ogrzewanie poza godzinami
pracy jest ekonomicznym nonsensem.
Praktycznie bez żadnych przeróbek
układ może pracować także jako progra−
mator włączający i wyłączający dowolne
urządzenie elektryczne, praktycznie do−
wolną (raster 2s.) ilość razy w ciągu doby.
Najprostsze zastosowanie narzuca się
samo: może on być dość dobrym symu−
latorem
obecności
domowników
w mieszkaniu, włączając i wyłączając np.
światło w pewnych pomieszczeniach.
Układ zbudowany został z zastosowa−
niem tanich i łatwo dostępnych elemen−
tów. Jego wykonanie nie przysporzy naj−
mniejszego kłopotu nawet początkują−
cym elektronikom.
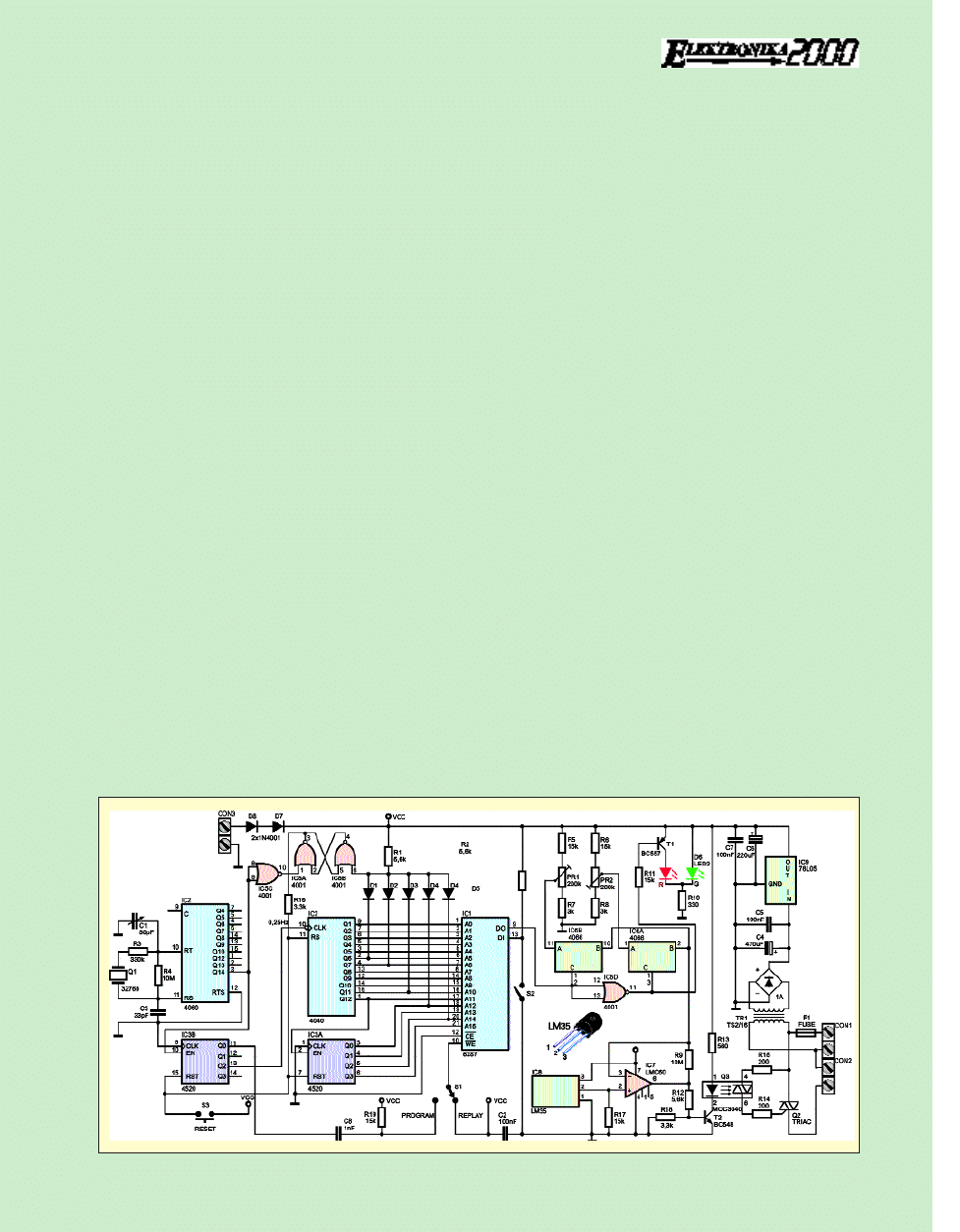
Jak to działa?
Analizę schematu przedstawionego
na rry
ys
su
un
nk
ku
u 1
1 przeprowadzimy tak, jak−
byśmy posługiwali się już gotowym urzą−
dzeniem, w formie „instrukcji obsługi”.
Pierwszą czynnością, jaką będziemy
musieli wykonać jest ustawienie dwóch
różnych temperatur, jakie układ będzie
utrzymywał w pomieszczeniu. Do tego
celu potrzebny nam będzie termometr
i
„źródło temperatury odniesienia”,
w ostateczności naczynie z wodą pod−
grzaną do odpowiedniej temperatury.
Najpierw musimy zaprogramować pierw−
szą temperaturę i jest zupełnie obojętne,
czy będzie to temperatura wyższa czy
niższa. Za pomocą przełącznika S1 usta−
wiamy nasz układ w tryb pracy PRO−
GRAM. Od tego momentu do pamięci za−
pisywane są już dane, które później, pod−
czas programowania nowych czasów zo−
staną z niej, oczywiście, wymazane.
Przełącznik S2 służy do wyboru jednej
z dwóch programowanych temperatur.
W pozycji zwartej na wejściu DI danych
pamięci IC1 panuje stan niski, przenoszo−
ny następnie na wyjście danych DO.
Z wejścia DO stan ten doprowadzany
jest do wejścia sterującego przełącznika
półprzewodnikowego IC6B powodując
jego wyłączenie. Jednocześnie, stan nis−
ki z tego wyjścia negowany jest przez
bramkę IC5D i doprowadzany do wejścia
sterującego drugiego przełącznika – IC6A
powodując jego otwarcie. Tak więc,
w tym momencie aktywny jest dzielnik
napięcia zbudowany z rezystorów R6 i R8
oraz z potencjometru montażowego PR2.
Napięcie z tego dzielnika porównywa−
ne jest za pomocą komparatora napięcia
zbudowanego
z
wykorzystaniem
wzmacniacza operacyjnego IC7 z napię−
ciem uzyskiwanym z wyjścia czujnika
E
LEKTRONIKA DLA WSZYSTKICH 9/98
56
2286
Termostat programowany
w cyklu 24−godzinnym
temperatury IC8. Jeżeli napięcie z czujni−
ka jest mniejsze od napięcia ustawione−
go za pomocą potencjometru montażo−
wego PR2, to na wyjściu komparatora
powstaje stan wysoki powodujący prze−
wodzenie tranzystora T2 i w konsekwen−
cji włączenia optotriaka Q3. Jak na razie,
to zjawisko w ogóle nas nie obchodzi,
podobnie jak nieustannie zapisywane do
pamięci dane.
Czujnik IC8 doprowadzamy do odpo−
wiedniej temperatury i pokręcając aktyw−
nym potencjometrem montażowym PR2
„łapiemy” punkt przełączania komparato−
ra. Aby ułatwić sobie tę czynność na wy−
jście układu CON2 dołączamy jakieś pro−
wizoryczne obciążenie, np. żarówkę
o niezbyt wielkiej mocy.
Po ustawieniu pierwszej z dwóch
temperatur przełączamy S2 w pozycję
przeciwną do pokazanej na schemacie.
Spowoduje to zamknięcie przełącznika
elektronicznego IC6A i otworzenie prze−
łącznika IC6B i, co za tym idzie, uaktyw−
nienie rezystora regulacyjnego PR1. Za
jego pomocą ustawiamy drugą z żąda−
nych temperatur i na tym kończymy re−
gulację układu.
Warto teraz wspomnieć o roli, jaką
w naszym układzie pełni dwubarwna dio−
da D6. Dioda ta została włączona w dość
ciekawy sposób: jeżeli tranzystor T1 nie
przewodzi – świeci dioda zielona. Włą−
czenie tranzystora T1, które nastąpi przy
stanie niskim na wyjściu bramki IC5D,
spowoduje przewodzenie tego tranzysto−
ra i włączenie diody czerwonej zawartej
w strukturze D6. Napięcie przewodzenia
diody czerwonej jest znacznie niższe niż
zielonej i w konsekwencji dioda ta zosta−
nie „zwarta” przez diodę czerwoną prze−
stając świecić. Zapamiętajmy więc:
· świecenie diody czerwonej oznacza
uaktywnienie dzielnika napięcia
z PR1 i utrzymywanie przez układ za−
programowanej tym dzielnikiem
temperatury. Dioda zielona sygnali−
zuje uaktywnienie dzielnika z PR2.
Dla wygody dobrze by było za pomocą
PR1 ustawić wyższą temperaturę, a za
pomocą PR2 niższą. Kolor zielony bar−
dziej kojarzy się bowiem z zimnem,
a czerwony z gorącem.
Możemy teraz przystąpić do progra−
mowania czasów włączania i wyłączania
ogrzewania. Niestety, będzie to czynność
nieco nużąca, ponieważ będziemy musie−
li poświęcić na nią dokładnie 24 godziny.
Na szczęście nie będziemy musieli prze−
bywać bez przerwy przy naszym progra−
matorze: wystarczy że o właściwej porze
zmienimy ustawienie temperatury. Pro−
gramowanie układu wykonamy w nastę−
pujący sposób:
1. Ustalamy wygodną dla nas porę rozpo−
częcia programowania i na wszelki wy−
padek zapisujemy jej dokładny czas.
2. Ustawiamy przełącznikiem S2 tempe−
raturę, jaka ma panować w tym mo−
mencie w pomieszczeniu (pamiętajcie
o roli diody D6).
3. Ustawiamy przełącznik S1 w pozycję
PROGRAM (o ile nie był już tak usta−
wiony).
4. W momencie nadejścia wyznaczonej
pory naciskamy na krótko przycisk S3 –
RESET. Spowoduje to chwilowe wy−
zerowanie liczników IC3B, IC2 i IC3A.
Po puszczeniu przycisku RESET liczni−
ki rozpoczynają pracę.
Pierwszy z liczników zbudowany z wy−
korzystaniem popularnego układu scalo−
nego typu 4060 zawiera w swojej struk−
turze generator stabilizowany rezonato−
rem kwarcowym i dzielnik binarny o stop−
niu podziału 2
14
. W naszym układzie za−
stosowaliśmy tani i powszechnie dostęp−
ny kwarc „zegarkowy” o częstotliwości
rezonansowej 32768Hz. Na wyjściu Q14
IC4 otrzymujemy częstotliwość 2Hz, któ−
ra jest o wiele za duża do naszych po−
trzeb. Dlatego też zastosowałem kolejny
dzielnik częstotliwości, na którego wy−
jściu otrzymujemy przebieg prostokątny
o okresie 2 s. Policzmy teraz trochę: doba
ma 86400 sekund, czyli że przy przyjętym
rastrze wynoszącym 2 s. liczba krokówm,
jakie wykonać musi nasz pracujący w cyk−
lu 24−godzinnym programator wyniesie
43200 czyli 1010100011000000
(BIN)
. Dyspo−
nujemy pamięcią o słowie jednobitowym
typu 6287, której maksymalna pojem−
ność wynosi 65535 bitów. Tak więc miej−
sca w pamięci wystarczy, a nawet trochę
zostanie. Impulsy o okresie trwania 2 s.
podawane są na wejście licznika IC2 –
4020, który bezpośrednio adresuje 11
młodszych wejść adresowych pamięci.
Pozostałe wejścia adresowane są przez
drugi licznik – IC3A dołączony kaskadowo
do licznika IC2.
Każde opadające zbocze występujące
na wyjściu Q0 licznika IC3B powoduje
wygenerowanie krótkiego impulsu pro−
gramującego kierowanego na wejście
WE\ pamięci IC1. Tak więc podczas każ−
dego kroku wykonywanego przez progra−
mator, na wejście to dostarczane są aż
cztery takie impulsy. Z pewnością zapyta−
cie, dlaczego aż cztery? Przecież do za−
programowania kolejnego bitu informacji
w zupełności wystarczyłby jeden impuls?
Racja, ale przyjęte rozwiązanie, niczego
nie zmieniające w zasadzie działania ukła−
du, zwiększa komfort jego obsługi pod−
czas programowania. Zmiana stanu prze−
57
E
LEKTRONIKA DLA WSZYSTKICH 9/98
R
Ry
ys
s.. 1
1.. S
Sc
ch
he
em
ma
att iid
de
eo
ow
wy
y
E
LEKTRONIKA DLA WSZYSTKICH 9/98
58
łącznika programującego S1 jest przeka−
zywana na wyjście DO, ale dopiero po
nadejściu impulsu programującego. Tak
więc, przy niekorzystnym zbiegu okolicz−
ności, na wizualne (dioda D6) potwierdze−
nie zmiany temperatury trzeba by było
czekać do 2 s., co przy testowaniu proto−
typu okazało się nieco denerwujące.
5. W momentach, kiedy jest to potrzebne
zmieniamy położenie przełącznika S2, po−
wodując zwiększenie lub zmniejszenie
temperatury panującej w pomieszczeniu.
6. Tak postępujemy przez 24 godziny, aż
do nadejścia tej samej godziny, minuty
i sekundy, w której rozpoczęliśmy pro−
gramowanie i dokładnie w tej przełą−
czamy S1 na pozycję PRACA. W tym
samym momencie na wyjściach liczni−
ków IC2 i IC3A powstanie stan
1010100011000000 (BIN). Diody D1
D5 przestaną zwierać do masy wejście
6 przerzutnika R−S zbudowanego z bra−
mek IC5A i IC5B, przerzutnik ten zmie−
ni swój stan powodując natychmiasto−
we wyzerowanie liczników. Najbliższe
dodatnie zbocze, które pojawi się na
wyjściu Q14 IC4 spowoduje ponowne
ustawienie przerzutnika R−S w stan
umożliwiający zliczanie licznikom IC2
i IC3A. Cykl dobowy rozpocznie się od
początku.
Układ zasilany jest z typowo skonstru−
owanego zasilacza, zbudowanego z wy−
korzystaniem popularnego scalonego
stabilizatora napięcia typu 7805. Warto
także pomyśleć o zasilaniu awaryjnym
urządzenia. W najprostszym przypadku
można do złącza oznaczonego na sche−
macie CON3 dołączyć cztery bateryjki
1,5V typu R6. Dwie diody – D7 i D8 za−
bezpieczają przed przepływem prądu
z układu do baterii. W momencie zaniku
prądu w sieci energetycznej układ zosta−
nie zasilony napięciem ok. 4,8V, co całko−
wicie wystarczy do poprawnej pracy ukła−
dów CMOS, a także zapobiegnie utracie
zawartości pamięci SRAM.
Montaż i uruchomienie
Na rry
ys
su
un
nk
ku
u 2
2 przedstawiona została
mozaika ścieżek płytki drukowanej wy−
konanej na laminacie dwustronnym
oraz rozmieszczenie na niej elementów.
Montaż układu przeprowadzamy w ty−
powy sposób, rozpoczynając od ele−
mentów o najmniejszych gabarytach,
a kończąc na wlutowaniu transformato−
ra sieciowego. Jak zwykle, zalecam za−
stosowanie podstawek pod wszystkie
układy scalone.
Układ prototypowy działał natychmiast
poprawnie, bez konieczności wprowa−
dzania jakichkolwiek poprawek. Pozwala
mi to sądzić, że Czytelnicy EdW także nie
natrafią na jakiekolwiek trudności pod−
czas jego montażu i uruchamiania.
Należy jeszcze wspomnieć o dwóch
sprawach. Zastosowany w układzie triak
typu BT136 charakteryzuje się maksy−
malnym prądem przewodzenia 6A (z ra−
diatorem), co może okazać się wartością
o wiele za małą w wielu zastosowaniach.
Można wtedy zastosować dowolny inny
typ triaka, o dopuszczalnym prądzie właś−
ciwym dla zasilanych urządzeń. Nic także
nie stoi na przeszkodzie, aby umieścić
triak na odpowiednim radiatorze, łącząc
go z płytką za pomocą przewodów.
Jak już wspomniałem, zbudowane
urządzenie można także zastosować do
sterowania urządzeniami innymi niż na−
grzewające. Może on np. włączać i wy−
łączać oświetlenie w określonych po−
rach dnia i nocy. Wystarczy dokonać
prostej przeróbki polegającej na zastą−
pieniu jednego z elementów dwoma re−
zystorami i odpowiednim ustawieniu po−
tencjometrów montażowych. Czytelnicy
proszeni są o przeanalizowanie, jaki to
będzie element i jak należy ustawić po−
tencjometry.
Z
Zb
biig
gn
niie
ew
w R
Ra
aa
ab
be
e
W
Wy
yk
ka
azz e
elle
em
me
en
nttó
ów
w
R
Re
ezzy
ys
stto
orry
y
PR1, PR2: potencjometr montażowy miniatu−
rowy 200k
Ω
R1, R2, R12: 5,6k
Ω
R5, R6, R11, R17, R19: 15k
Ω
R3: 330k
Ω
R4, R9: 10M
Ω
R7, R8, R16, R18: 3k
Ω
R10: 330
Ω
R13: 560
Ω
R15, R14: 220
Ω
/0,5W
K
Ko
on
nd
de
en
ns
sa
atto
orry
y
C8: 1nF
C1: trymer 25pF
C2: 100nF
C3: 33pF
C4: 470µF/16
C6 : 220µF/10V
C5, C7 : 100nF
P
Pó
ółłp
prrzze
ew
wo
od
dn
niik
kii
BR1: mostek prostowniczy 1A
D1, D2, D3, D4, D5: 1N4148
D6: dwubarwna dioda LED lub odpowiednik
D7, D8: 1N4001 lub odpowiednik
IC1: 6287 (pamięć SRAM (64k×1))
IC2: 4040
IC3: 4520
IC4: 4060
IC5: 4001
IC6: 4066
IC7: LMC60
IC8: LM35
IC9: 78L05
Q2: BT136 lub odpowiednik
Q3: MOC3040
T1: BC557 lub odpowiednik
T2: BC548 lub odpowiednik
P
Po
ozzo
os
stta
ałłe
e
F1: oprawka do bezpiecznika
CON1, CON2: ARK2
CON3: ARK2 (3,5mm)
Q1: rezonator kwarcowy 32768Hz
S1, S2: przełącznik dźwigienkowy
S3: przycisk RESET
TR1 : transformator sieciowy TS2/16
PostScript Picture
AVT2286
R
Ry
ys
s.. 2
2.. S
Sc
ch
he
em
ma
att m
mo
on
ntta
ażżo
ow
wy
y
K
Ko
om
mp
plle
ett p
po
od
dzze
es
sp
po
ołłó
ów
w zz p
płły
yttk
ką
ą jje
es
stt
d
do
os
sttę
ęp
pn
ny
y w
w s
siie
ec
cii h
ha
an
nd
dllo
ow
we
ejj A
AV
VT
T jja
ak
ko
o
„
„k
kiitt s
szzk
ko
olln
ny
y”
” A
AV
VT
T−2
22
28
86
6..
59
E
LEKTRONIKA DLA WSZYSTKICH 9/98
Do czego to służy?
Zasilaczy najróżniejszego rodzaju
opisaliśmy już na łamach EdW bardzo
wiele. Praktyka jednak wykazuje, że za−
potrzebowanie na te układy jest bardzo
duże, ponieważ niemal do każdego
układu elektronicznego można dostoso−
wać zasilacz o zupełnie odmiennych pa−
rametrach.
Jak wielkie znaczenie ma zapewnie−
nie nieustannego dopływy prądu do
niektórych urządzeń elektronicznych,
wie każdy elektronik. Nie tylko zresztą
elektronik, ponieważ nie ma chyba niko−
go, komu nie przydarzyłaby się niemiła
przygoda polegająca na krótkotrwałym
wyłączeniu prądu pod sam koniec kilku−
godzinnej pracy np. w edytorze teksto−
wym. Do systemów komputerowych
produkowane są specjalne zasilacze,
tzw. UPS (Uninterruptible Power Sup−
ply), urządzenia stosunkowo kosztow−
ne. Stosowanie takiego układu ma sens
jedynie przy systemach komputero−
wych wymagających stałego i nieza−
wodnego zasilania oraz przy zasilaniu
bardzo rozbudowanych i pobierających
dużo prądu układów elektronicznych
i elektrycznych.
My zbudujemy sobie coś znacznie
prostszego i tańszego: uniwersalny
zasilacz do systemów cyfrowych.
Układ ten został zaprojektowany i wy−
konany w ściśle określonym celu:
miał on zasilać bez najmniejszej prze−
rwy przez okres dwóch lat zegar. Ze−
gar dość specyficznej budowy, zlicza−
jący sekundy, minuty, godziny i dni ja−
kie nam pozostały do końca XX stule−
cia. Proponowany układ można jednak
zastosować do zasilania dowolnego
urządzenia cyfrowego, lub innego wy−
magającego bezawaryjnego dostar−
czania napięcia +5VDC. Jako awaryj−
ne źródło prądu w układzie modelo−
wym zastosowałem sześć akumulato−
rów NiCd połączonych szeregowo –
typowy pakiet stosowany w modelar−
stwie do zasilania silników samolotów
z napędem elektrycznym. Akumulato−
ry takie cechuje szczególnie wysoka
jakość i odporność na warunki ze−
wnętrzne, co niestety okupione jest
ich dość wysoką ceną. W typowych
zastosowaniach można jednak użyć
zwykłych ogniw NiCd, np. wymiaru
baterii R6, o pojemności do 1000mAh.
Można także rozważyć zastosowanie
akumulatora kwasowego o napięciu
12V. Nie jest to jednak rozwiązanie
najlepsze ze względu na znaczną moc
strat jaka wydzielałby się na stabiliza−
torze napięcia.
UPS do systemów cyfrowych
2290
R
Ry
ys
s.. 1
1.. S
Sc
ch
he
em
ma
att iid
de
eo
ow
wy
y
Najistotniejszą zaletą proponowane−
go zasilacza jest to, że doładowuje on
baterię akumulatorów nie stałym prą−
dem, lecz impulsowo, w określonych
odstępach czasu. Jest to bardzo ważna
cecha, ponieważ jak wiadomo, akumula−
tory NiCd wyjątkowo „nie lubią” dołado−
wywania ich stałym prądem, co naj−
częściej ma miejsce w konstrukcjach
awaryjnego zasilania.
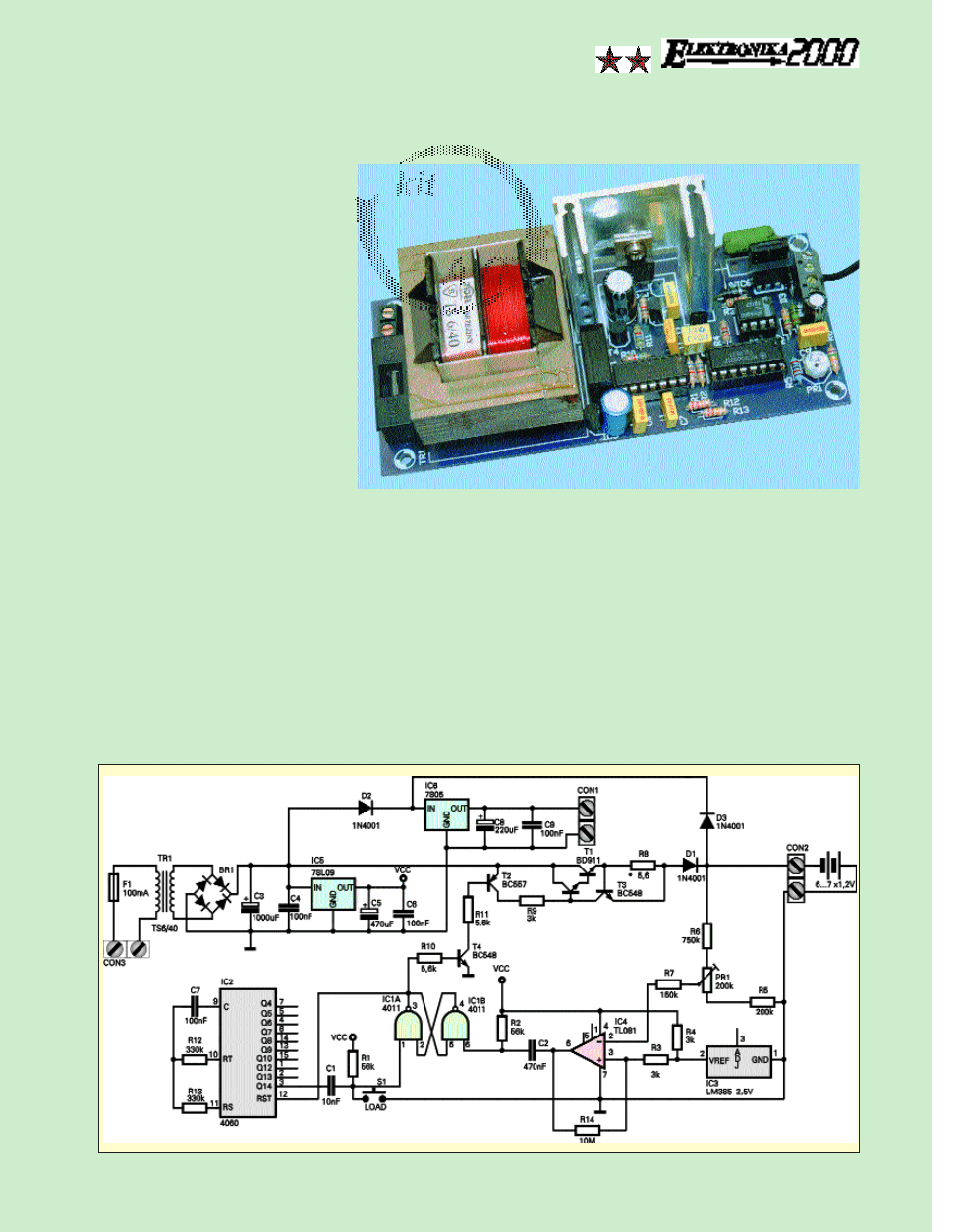
Jak to działa?
Schemat elektryczny proponowanego
układu zasilacza został pokazany na rry
y−
s
su
un
nk
ku
u 1
1. Jak widać, układ jest bardzo
prosty i jego omówienie nie zajmie nam
z pewnością wiele czasu.
Napięcie zasilające wszystkie elemen−
ty układu dostarczane jest z transforma−
tora sieciowego TR1, prostowane
w prostowniku pełnookresowym BR1
i wygładzane za pomocą kondensatora
C3. Następnie kierowane jest do trzech
podstawowych bloków układu, które ko−
lejno omówimy.
Fragment urządzenia zbudowany
z wykorzystaniem scalonego stabiliza−
tora napięcia typu 7805 – IC6 jest ty−
powo skonstruowanym zasilaczem do−
starczającym napięcia do zasilanego
układu i nie jest wart szerszego omó−
wienia. Podobnie ma się sprawa
z układem IC5, którego zadaniem jest
zasilanie całego naszego układu. Pozo−
stańmy natomiast chwilę przy układzie
zbudowanym na tranzystorach T1
...T4. Zadaniem tego bloku funkcjonal−
nego układu zasilacza, pracującego ja−
ko dość stabilne źródło prądowe jest
dostarczanie stałego prądu ładowania
baterii
akumulatorów.
Prąd
ten
określony jest wartością rezystora R8,
na którym dzięki sprzężeniu zwrotne−
mu poprzez tranzystor T3 utrzymuje
się stałe napięcie ok. 0,6V. Wartość te−
go rezystora musi być dostosowana
do
pojemności
współpracujących
z układem akumulatorów. Bateria za−
stosowana w układzie modelowym
miała pojemność 1000mA i stąd, przy
założeniu ładowania i doładowywania
akumulatorów prądem dziesięciogo−
dzinnym, wartość ta wyniosła 5,6
Ω
.
Wartość rezystora R8 dla innych po−
jemności akumulatorów łatwo obliczyć
korzystając z wzoru: R = U/I gdzie
U = 0,6V, a I = 1/10 pojemności bate−
rii akumulatorów.
Należy zauważyć, że bateria aku−
mulatorów będzie ładowana tylko
wtedy, kiedy tranzystor T2 będzie po−
zostawał włączony, czyli wtedy kiedy
baza tranzystora T4 będzie spolaryzo−
wana, co wykorzystywane jest przez
układ sterujący ładowaniem i dołado−
wywaniem baterii.
A więc dobrze, zbudowaliśmy już
nasz zasilacz i dołączyliśmy do niego
baterię akumulatorów, chyba nałado−
waną do wymaganego poziomu. Na
wszelki wypadek naciskamy więc przy−
cisk „LOAD” powodując włączenie
przerzutnika R−S zbudowanego na
bramkach NAND IC1A i IC1B. Konsek−
wencją tego faktu będzie spolaryzowa−
nie bazy T4, rozpoczęcie ładowania
akumulatora i powolne narastanie na−
pięcia na jej zaciskach.
Wzmacniacz operacyjny IC4 pracuje
w naszym układzie jako komparator,
porównując napięcia z wysokostabilne−
go wzorca zbudowanego z wykorzysta−
niem układu IC3 z napięciem na aku−
mulatorze, a właściwie z proporcjonal−
nym do niego napięciem uzyskiwanym
z dzielnika R6, PR1, R5. Ładowanie
akumulatorów trwa aż do momentu,
kiedy napięcie na wejściu 2 IC4 stanie
się wyższe od napięcia wzorca, czyli
od 2,5V. Krótki impuls ujemny z wyjś−
cia komparatora napięcia zostaje
w tym momencie przekazany na wejś−
cie zerujące przerzutnika R−S po−
wodując jego natychmiastowe
wyłączenie, a także odłączenie
prądu ładowania akumulatorów.
Zauważmy teraz, że podczas
ładowania akumulatorów licznik
binarny zawarty w strukturze
układu scalonego IC2 nie praco−
wał, zablokowany stanem wyso−
kim panującym na jego wejściu
zerującym. Obecnie rozpoczyna
on pracę zliczając impulsy, któ−
rych częstotliwość zależna jest od
wartości rezystancji R12 i R13
oraz pojemności C7.
c.d. na str. 62
E
LEKTRONIKA DLA WSZYSTKICH 9/98
60
PostScript Picture
2290
R
Ry
ys
s.. 2
2.. S
Sc
ch
he
em
ma
att m
mo
on
ntta
ażżo
ow
wy
y
W
Wy
yk
ka
azz e
elle
em
me
en
nttó
ów
w
R
Re
ezzy
ys
stto
orry
y
PR1 potencjometr montażowy miniaturowy:
200k
Ω
R1, R2: 56k
Ω
R3, R4, R9: 3k
Ω
R5: 200k
Ω
R6: 750k
Ω
R7: 150k
Ω
R8: 5,6
Ω
(patrz tekst)
R11, R10: 5,6k
Ω
R12, R13: 330k
Ω
R14: 10M
Ω
K
Ko
on
nd
de
en
ns
sa
atto
orry
y
C1: 10nF
C2: 470nF
C3: 1000µF/16
C4, C6, C7, C9: 100nF
C5: 470µF/16
C8: 220µF/16
P
Pó
ółłp
prrzze
ew
wo
od
dn
niik
kii
BR1 mostek prostowniczy 1A
D1, D2, D3: 1N4001 lub odpowiednik
IC1: 4011
IC2: 4060
IC3: LM385 – 2,5v
IC4: TL081 lub odpowiednik
IC5: 78L09
IC6: 7805
T1: BD911 lub odpowiednik
T2: BC557 lub odpowiednik
T3, T4: BC548 lub odpowiednik
P
Po
ozzo
os
stta
ałłe
e
CON1, CON2, CON3: ARK2
F1: plastykowa oprawka bezpiecznika + bez−
piecznik 100mA
TR1: transformator sieciowy TS6/40
Uwaga! Akumulatorki nie wchodzą w skład
kitu AVT−2290B.
61
E
LEKTRONIKA DLA WSZYSTKICH 9/98
Do czego to służy?
Niżej opisany włącznik reaguje na do−
tknięcie czujnika palcem. Zastosowanie
tego włącznika może być różnorodne np.
po dołączeniu przekaźnika może służyć
jako włącznik światła czy jako czujnik do
alarmu reagujący na dotknięcie na przy−
kład klamki.
Przed zaprojektowanie moich wyłącz−
ników wykonałem najpierw ekspery−
menty z wyłącznikiem AVT−2011. Do tes−
tów wykorzystałem wiertarkę i metalo−
wy śrubokręt.
Proponowana wersja przełącznika
jest w całości wykonana przy użyciu
elementów CMOS. Układ jest wypo−
sażony nie w jeden sensor lecz dwa.
Pierwotna idea miała polegać na tym,
że dwa sensory będzie się łączyło
z metalową płytką w dwóch miejs−
cach, a układ będzie reagował tylko
wtedy, gdy na obu wejściach senso−
rów będzie taki sam potencjał. Układ
od razu działał po zaprojektowaniu
i zmontowaniu. Po próbach okazało
się, że układ jeszcze bardziej jest od−
porny na różne zakłócenia, gdy oba
wejścia czujników są zwarte.
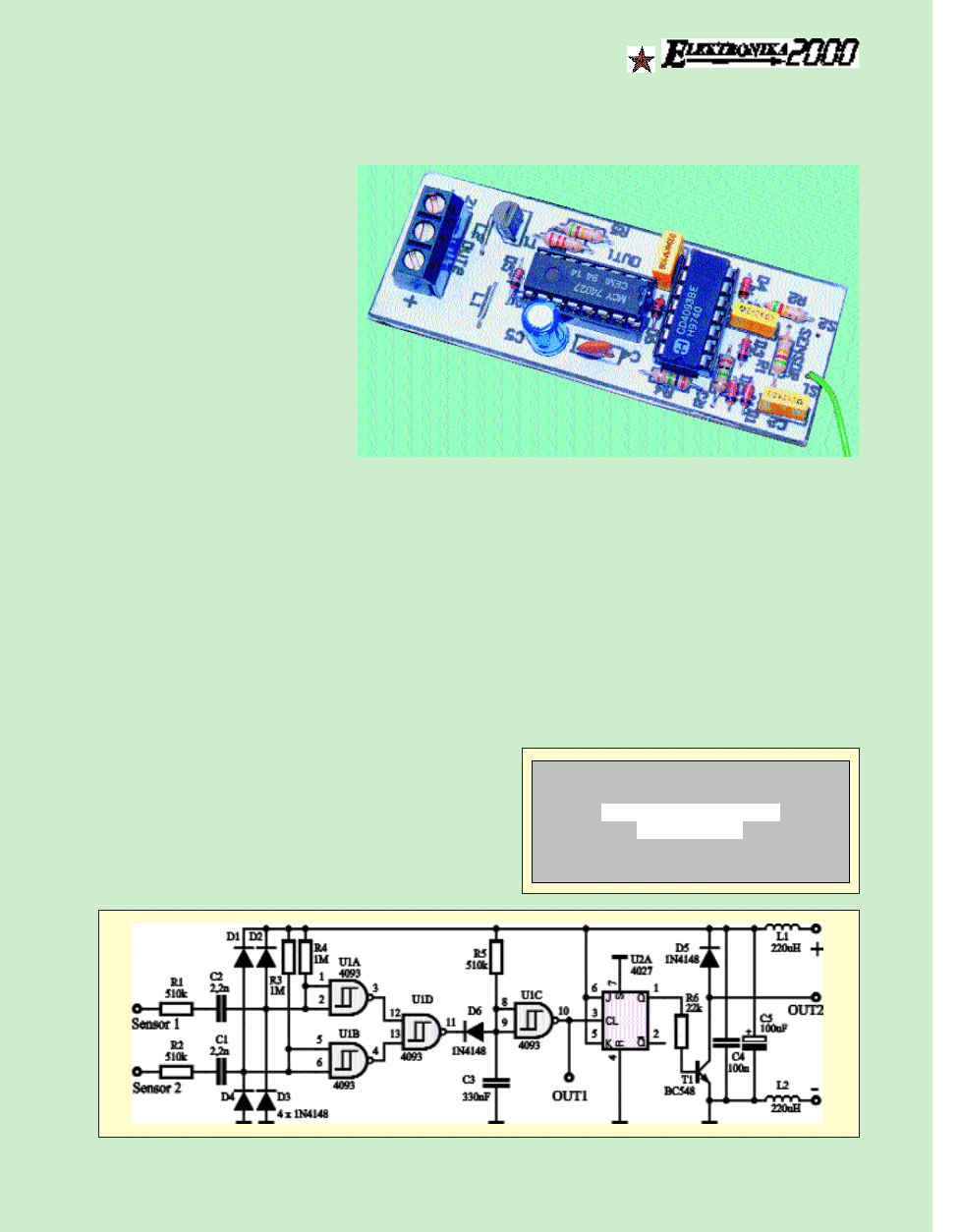
Jak to działa?
Schemat ideowy włącznika znajduje
się na rry
ys
su
un
nk
ku
u 1
1. Układ składa się tylko
z dwóch układów CMOS i jest włączni−
kiem z dwoma czujnikami. Reaguje na
dotknięcie tylko wtedy, gdy na obu we−
jściach (czujnikach) pojawi się taki sam
stan. W roli układów sensorowych wy−
stępują bramki CMOS U1A i U1B, dzię−
ki czemu układ posiada dużą czułość,
zależną jedynie od wartości rezystorów
R3 i R4. Diody D1 – D4 zabezpieczają
wejścia bramek przed przepięciami.
Elementy R1, R2, C1 i C2 służą do wy−
generowania ujemnego impulsu po do−
tknięciu sensorów (w stosunku do plu−
sa zasilania). Zmiana stanu bramki U1D
z wysokiego na niski, następuje tylko
wtedy, gdy na obu wyjściach bramek
U1A i U1B pojawi się stan wysoki.
Bramki U1C i U1D wraz z elementami
D6, C3 i R5 tworzą przerzutnik mono−
stabilny przewidziany w celu wydłuże−
nia impulsu wejściowego. Sygnał z wy−
jścia U1C steruje wejściem zegarowym
przerzutnika J−K (U2A) w konfiguracji
włącz/wyłącz. Wyjście układu U2A ste−
ruje tranzystorem T1, dzięki czemu
można po podłączeniu zewnętrznego
przekaźnika sterować większymi obcią−
żeniami. Dioda D5 za−
bezpiecza tranzystor, na−
tomiast R6 ogranicza
prąd bazy tego tranzys−
tora. Elementy L1, L2,
C4 oraz C5 zabezpiecza−
ją przed zakłóceniami.
W układzie znajduje się
dodatkowe
wyjście
oznaczone OUT1. Może
ono służyć po zmianie elementów R5
i C3 do włączana innych urządzeń na
określony czas.
Montaż i uruchomienie
Na rry
ys
su
un
nk
ku
u 2
2 przedstawiony został
widok płytki obwodu drukowanego
i rozmieszczenie elementów. Układ
montuje się zgodnie z ogólnie znanymi
zasadami czyli rozpoczynając montaż
od elementów najmniejszych, a koń−
cząc na największych. Wykonanie płyt−
ki dotykowej sensora zależy jedynie
od pomysłowości czytelnika: może to
być blaszka lub nawet odcinek drutu.
Przełącznik dotykowy
R
Ry
ys
s.. 1
1.. S
Sc
ch
he
em
ma
att iid
de
eo
ow
wy
y
PostScript Picture
DOTYK2A
R
Ry
ys
s.. 2
2.. S
Sc
ch
he
em
ma
att m
mo
on
ntta
ażżo
ow
wy
y
E
LEKTRONIKA DLA WSZYSTKICH 9/98
62
Jeżeli blaszka czy przewód będą połą−
czone z dwoma wejściami układu, to
na płytce należy przeciąć ścieżkę
w miejscu oznaczonym X. Jednak
z przeprowadzonych testów wynika, iż
lepsze efekty uzyskano gdy oba we−
jścia były połączone na płytce, nato−
miast czujnik był dołączony do jedne−
go z wejść S1 lub S2.
M
Ma
arrc
ciin
n W
Wiią
ązza
an
niia
a
O
Od
d R
Re
ed
da
ak
kc
cjjii.. Jest to jeden z dwóch
projektów nadesłanych przez Autora
w ramach rozwiązania zadania nr 27
w Szkole Konstruktorów. W stosunku
do oryginalnej propozycji Autora
wprowadzono tylko jedną drobną po−
prawkę polegającą na zwiększeniu re−
zystancji R3, R4 z 1M
Ω
do 10M
Ω
, co
radykalnie zwiększyło czułość układu.
Zgodnie ze wskazówkami podanymi
w tym numerze w Szkole Konstrukto−
rów dla dodatkowego filtrowania syg−
nału z czujnika, równolegle do diod
D3, D4 można włączyć kondensatory
o pojemności 220...330pF. Układ mo−
że pracować także przy zwarciu kon−
densatorów C1 i C2.
Uwaga! Układ może nie działać po−
prawnie, jeśli będzie zasilany z baterii,
a nie z zasilacza sieciowego. Przy zasi−
laniu bateryjnym masę układu należy
połączyć z ziemią bezpośrednio lub
przez rezystancję do 1M
Ω
lub pojem−
ność nie mniejszą niż 10nF.
W
Wy
yk
ka
azz e
elle
em
me
en
nttó
ów
w
R
Re
ezzy
ys
stto
orry
y
R1,R2,R5: 510k
Ω
R3,R4: 10 M
Ω
R6: 22k
Ω
K
Ko
on
nd
de
en
ns
sa
atto
orry
y
C1,C2: 2,2nF
C3: 330nF
C4: 100nF (ceramiczny)
C5: 100µF
P
Pó
ółłp
prrzze
ew
wo
od
dn
niik
kii
U1: 4093
U2: 4027
D1 – D6: 1N4148
T1: BC548 (dowolny npn)
P
Po
ozzo
os
stta
ałłe
e
ARK3: 1 szt.
L1,L2: 220...330µH
Po upływie pewnego czasu (z war−
tościami elementów takimi jak na
schemacie ok. 1godz) opadające zbo−
cze sygnału z najstarszego wyjścia licz−
nika – Q14 spowoduje powtórne włą−
czenie przerzutnika R−S i ponowne roz−
poczęcie ładowania akumulatorów.
Przy sprawnych akumulatorach
czas ten będzie już jednak bar−
dzo krótki. Tak więc osiągnę−
liśmy to, co chcieliśmy:
bateria jest naładowa−
na i okresowo doła−
dowywana krótki−
mi impulsami prą−
du, co jak wiemy aku−
mulatory NiCd „lubią”.
Rozpatrzmy teraz spo−
sób zasilania dołączonego do
naszego urządzenia odbiornika
energii, np. układu cyfrowego. Je−
żeli w sieci energetycznej jest napię−
cie, to odbiornik energii zasilany jest
za pośrednictwem diody D2 i stabili−
zatora IC6. Z akumulatora żaden prąd
nie płynie, ponieważ napięcie na
wejściu stabilizatora 7805 jest w tym
momencie znacznie wyższe niż na za−
ciskach baterii. W momencie prze−
rwania dopływu energii z sieci napię−
cie na wejściu IC6 spada powodując
przepływ prądu przez diodę D3. Zasi−
lany układ pobiera teraz energię
z akumulatora, a nam pozostaje jedy−
nie mieć nadzieję, że elektrownia
przywróci dopływ prądu przed jego
rozładowaniem.
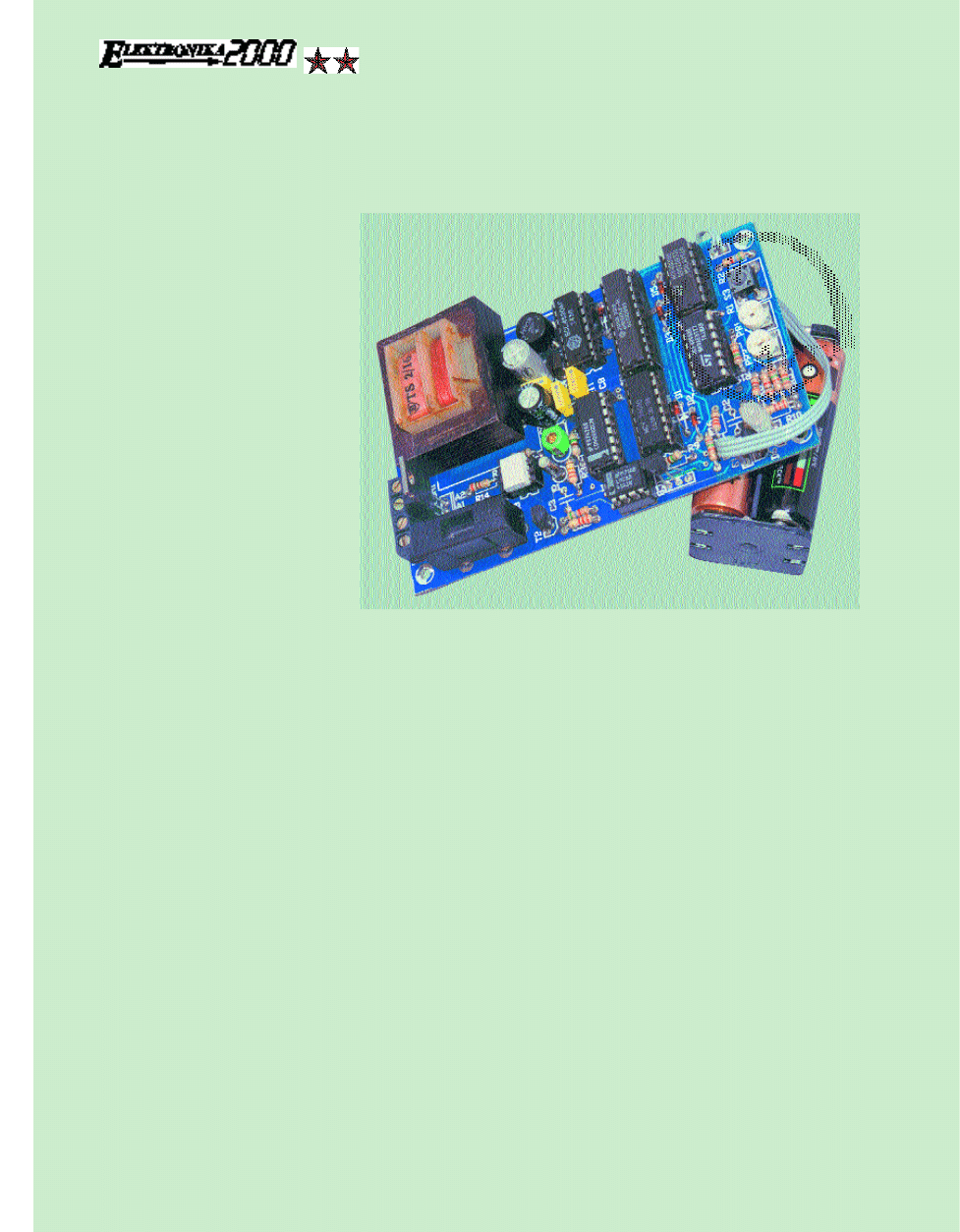
Montaż i uruchomienie
Na rry
ys
su
un
nk
ku
u 2
2 przedstawiona została
mozaika ścieżek i rozmieszczenie ele−
mentów na płytce obwodu drukowa−
nego zaprojektowanego na lamina−
cie jednostronnym.
Niestety, nie udało mi się
uniknąć konieczności za−
stosowania
jednej
zwory i
od niej
właśnie rozpocz−
niemy
montaż
układu. Kolejno lutu−
jemy w płytkę rezystory,
diody, podstawki pod ukła−
dy scalone i elementy o naj−
większych gabarytach. Początku−
jącym konstruktorom radzę nie
montować na razie transformatora sie−
ciowego i do regulacji układu użyć ze−
wnętrznego zasilacza dostarczającego
prądu stałego lub przemiennego
o właściwym napięciu. Pozwoli to na
uniknięcie konieczności dokonywania
regulacji na płytce, której część znajdu−
je się pod niebezpiecznym dla życia na−
pięciem sieci energetycznej.
Zmontowany z dobrych elemen−
tów układ zasilacza nie wymaga ja−
kiegokolwiek uruchamiania, ale jedy−
nie prostej regulacji, do której wyko−
nania będziemy potrzebować jedynie
woltomierza, najlepiej cyfrowego. Do
naszego dołączamy napięcie z zasila−
cza pomocniczego lub (mniej zaleca−
ne) dołączamy napięcie sieci do złą−
cza CON3. Do wyjścia CON2 przyłą−
czamy baterię złożoną z 6 akumula−
torków NiCd, a suwak potencjometru
montażowego PR1 ustawiamy w po−
łożeniu najbliżej masy. Następnie do−
łączamy woltomierz ustawiony na od−
powiedni zakres do zacisków akumu−
latora i naciskamy przycisk LOAD.
Napięcie na zaciskach akumulatora
zacznie powoli narastać i w zależ−
ności od stanu ich rozładowania
osiągnie po pewnym (maksymalnie
po 10 godz.) czasie 8,28V. Będzie to
sygnałem, że akumulatory są już
w pełni naładowane. Teraz delikatnie
i powoli przekręcając potencjometr
montażowy doprowadzamy do poja−
wienia się stanu wysokiego na wyjś−
ciu 4 bramki IC1B, co będzie świad−
czyć o odłączeniu prądu ładowania.
Od tego momentu możemy uwa−
żać zbudowany układ za gotowy do
pracy.
Z
Zb
biig
gn
niie
ew
w R
Ra
aa
ab
be
e
K
Ko
om
mp
plle
ett p
po
od
dzze
es
sp
po
ołłó
ów
w zz p
płły
yttk
ką
ą jje
es
stt
d
do
os
sttę
ęp
pn
ny
y w
w s
siie
ec
cii h
ha
an
nd
dllo
ow
we
ejj A
AV
VT
T jja
ak
ko
o
„
„k
kiitt s
szzk
ko
olln
ny
y”
” A
AV
VT
T−2
22
29
90
0..
Uwaga!
W urządzeniu
występują napięcia
mogące stanowić śmiertel−
ne zagrożenie dla życia! Osoby
niepełnoletnie mogą wykonać i uru−
chomić opisany układ tylko
pod opieką wykwalifi−
kowanych osób
dorosłych.
UPS do systemów cyfrowych
(c.d. ze str. 60)
Podczas konstruowania dla Was ukła−
dów sterownia serwomechanizmami mo−
delarskimi przydarzyły mi się dwie, przy−
kre przygody. Zawsze powtarzam, że tyl−
ko ten się nie myli, kto nic nie robi, no
i pomyliłem się! Jeden z serwomechaniz−
mów nie wytrzymał odwrotnego podłą−
czenia zasilania (i to w dodatku 15 zamiast
6V) i jego układ elektroniczny dosłownie
poszedł z dymem. Konsekwencją kolejne−
go przejawu mojego roztargnienia było
„zwalenie” przekładni mechanicznej
w kolejnym serwomechanizmie, pozosta−
wionym pod pełnym obciążeniem na wie−
le godzin. Naprawa uszkodzonej przekład−
ni była absolutnie niemożliwa, a nawet
gdyby była, to wartość robocizny włożo−
nej w taką naprawę wielokrotnie przekro−
czyłaby koszt zakupu nowego urządzenia.
Także wymiana spalonego układu scalo−
nego w drugim serwie była nie do pomyś−
lenia, ponieważ są to układy wyspecjalizo−
wane, produkowane na specjalne zamó−
wienie firm wytwarzających aparatury do
zdalnego sterowania modeli.
Tak więc leżały przede mną dwa
uszkodzone serwa, jakby nie było dość
kosztowne. Co więc miałem z niemi zro−
bić, wyrzucić na śmietnik? Właściwie,
w moim przypadku miałem jedno rozwią−
zanie, pozwalające na ocalenie jednego
serwa: po prostu mogłem połączyć
sprawną elektronikę z nieuszkodzoną
przekładnią mechaniczną, a resztę wyrzu−
cić. Pomyślałem jednak o moich Czytelni−
kach, w których rękach może znaleźć się
tylko jedno uszkodzone serwo i przepro−
wadziłem kilka eksperymentów.
Najpierw zająłem się serwomechaniz−
mem z uszkodzoną elektroniką. Po otwar−
ciu obudowy ujrzałem iście przerażający
widok prawie doszczętnie wypalonej płyt−
ki obwodu drukowanego, która natych−
miast została odłączona od reszty ele−
mentów i powędrowała do śmietnika. No
i co dalej? Leżała przede mną kompletna
i sprawna przekładnia mechaniczna, silnik
o bardzo dużej jak na swoje wymiary mo−
cy oraz kompletna obudowa. Wszystko to
razem mogłoby zostać zastosowane jako
np. układ napędowy do modelu pojazdu,
gdyby nie jeden problem. Jak wiecie,
większość serw modelarskich może obra−
cać się o kąt równy 60 lub 90°, a stosując
wydłużanie i skracanie impulsów sterują−
cych poza normę przewidzianą dla apara−
tur RC możemy uzyskać zwiększenie te−
go kąta do maksymalnie 270°. Na wale na−
pędowym serwa znajduje się specjalny
występ uniemożliwiający jego obrócenie
się o większy kąt. Stosowanie takiego za−
bezpieczenia jest absolutnie niezbędne
w sprawnym serwomechanizmie, ponie−
waż bez niego mogłoby dojść do uszko−
dzenia styków potencjometru. Tak więc
wiemy już co robić:
Mechanizm rozkładamy na części, za−
pamiętując wzajemne położenie kółek zę−
batych i usuwamy występ na wale napę−
dowym ograniczający kąt jego obrotu.
Usuwamy niepotrzebny już potencjo−
metr, przewody zasilające lutujemy bez−
pośrednio do wyprowadzeń silnika i sta−
rannie składamy z powrotem serwo.
I tak z popsutego urządzenia, które
większość ludzi po prostu by wyrzuciło,
uzyskaliśmy doskonały układ napędo−
wy, który ... został już nawet wypróbo−
wany w praktyce. (W numerze 7/95
Elektroniki Praktycznej opublikowany
został opis prostego pojazdu – zabawki,
podobnego
nieco
do
naszych
„raabowozów”, napędzanego właśnie
dwoma takim przerobionymi serwome−
chanizmami. Polecam Wam lekturę
wspomnianego artykułu.)
Następnie przyszła pora na zagospo−
darowanie serwa z trwale uszkodzoną
częścią mechaniczną. Zarówno silnik jak
i zębatki przekładni przedstawiały obraz
kompletnej ruiny i zostały wysłane w śla−
dy części elektronicznej pierwszego ser−
wa. Natomiast z
obudowy została
„wypreparowana” płytka z sprawnym
układem elektronicznym. I tu otworzyły
się przed nami spore możliwości wyko−
rzystania tego elementu.
Uważnie obejrzałem płytkę układu
elektronicznego. Znajduje się na niej układ
scalony w obudowie DIL14 i znaczna ilość
elementów SMD ulokowanych nietypowo
na spodniej stronie płytki. Niestety, układ
scalony jest bardzo trudny do zidentyfiko−
wania, ponieważ jest to kostka robiona na
specjalne zamówienie firmy HITEC, zna−
nego producenta osprzętu RC i posiadają−
ca jedynie nic nie mówiące oznaczenie
HT7001. Można jedynie przypuszczać, że
układ ten jest odpowiednikiem kostki
NE544, ale żadnej pewności bez dokład−
nej analizy układu elektronicznego umiesz−
czonego na płytce mieć nie możemy.
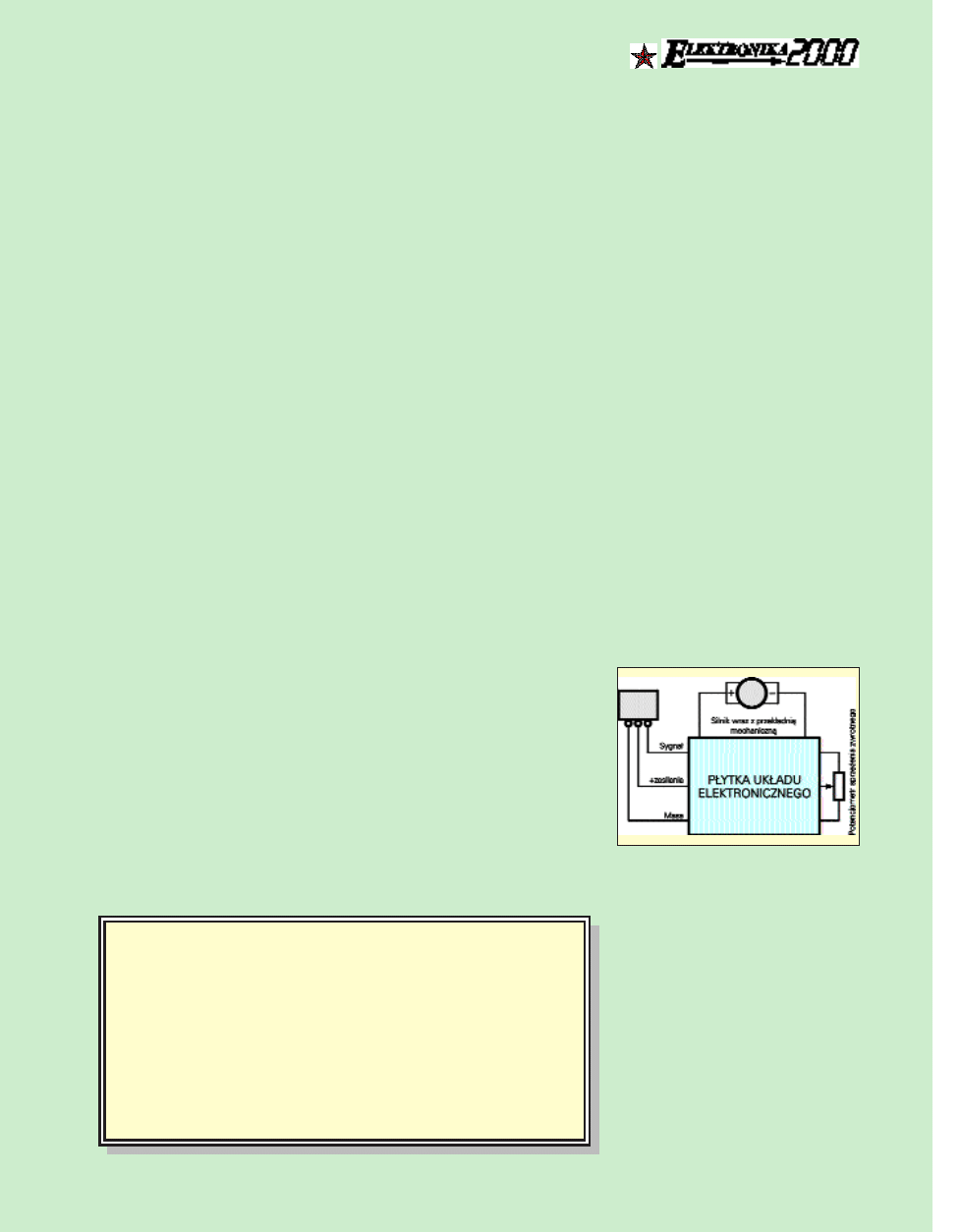
Schemat blokowy wewnętrznej budo−
wy serwa został pokazany na rry
ys
su
un
nk
ku
u 1
1.
Mogę zaproponować Wam przynaj−
mniej trzy możliwości wykorzystania
sprawnej części elektronicznej serwa.
Może on, po niewielkiej przeróbce słu−
żyć jako układ sterujący przekaźnikiem
włączającym dowolne dodatkowe urzą−
dzenia w modelu lub innej urządzeniu ste−
rowanym metodą proporcjonalną. Prze−
kaźnik będzie się włączał i wyłączał w za−
leżności od pozycji sterującego nim drążka
manipulatora w nadajniku aparatury zdal−
nego sterowania lub innego układu steru−
jącego. Aby dokonać przeróbki układu mu−
simy wykonać następujące czynności:
Do płytki dochodzi 8 przewodów,
w trzech wiązkach. Trzy przewody zakoń−
czone wtykiem pozostawiłem bez zmian,
63
E
LEKTRONIKA DLA WSZYSTKICH 9/98
Nietypowe zastosowania
serwomechanizmów modelarskich
Serwomechanizmy modelarskie
już w ofercie handlowej AVT!
Dane techniczne standardowego serwomechanizmu firmy HITEC typu HS300
Napięcie zasilania:
typowe 4,8...6VDC
Kąt obrotu przy sterowaniu typowymi
impulsami (1...2ms):
60°
Kąt obrotu przy sterowaniu impulsami 0,5...3ms:
190°
Zapytania o bliższe informacje i zamówienia
prosimy kierować do Działu Handlowego AVT
R
Ry
ys
s.. 1
1..
będą one dalej służyć do połączenia na−
szego układu z odbiornikiem. Przewody
prowadzące poprzednio do silnika także
zostaną później wykorzystane, a nas inte−
resują w tej chwili trzy przewody prowa−
dzące do potencjometru sprzężenia
zwrotnego. Jedynymi elementami elekt−
ronicznymi w jakie musimy się zaopat−
rzyć są dwa rezystory o jednakowej war−
tości, o możliwie małych rozmiarach. Ich
rezystancja nie jest krytyczna, ze wzglę−
du na wielką rezystancję wejściową za−
stosowanego układu scalonego rezystory
te mogą mieć wartość od ok. 1k
Ω
do ok.
10k
Ω
. Przewody prowadzące do poten−
cjometru delikatnie wylutowujemy z płyt−
ki, dokładnie zapamiętując miejsce ich
uprzedniego wlutowania. Ze względu na
znaczne zagęszczenie elementów na
spodniej stronie płytki czynność tą musi−
my wykonać z największą uwagą, aby nie
zewrzeć ze sobą punktów lutowniczych
i ścieżek. Następnie w miejsce przewo−
dów wlutowujemy rezystory tak, jak po−
kazano na rry
ys
su
un
nk
ku
u 2
2.
Warto teraz zastanowić się, co właści−
wie zrobiliśmy? Po prostu dokonaliśmy
małego oszustwa: układ scalony będzie
teraz „uważał”, że w dalszym ciągu jest
do niego dołączony potencjometr ustawio−
ny dokładnie w środkowym położeniu. Je−
żeli teraz przerobiony układ dołączymy do
dekodera, to w neutralnym położeniu ma−
nipulatora nic się nie będzie działo. Ste−
rownik „uzna” że układ wykonawczy zna−
jduje się w właściwym położeniu i nie bę−
dzie dążył do zmiany jego pozycji. Jeżeli
jednak przesuniemy dźwignię manipulato−
ra, to sterownik odbierze sygnał nakazują−
cy mu przesunięcie mechanizmu wyko−
nawczego. Na wyprowadzeniach połączo−
nych uprzednio z silnikiem pojawi się na−
pięcie o polaryzacji zależnej od kierunku
przesunięcia dźwigni manipulatora. Ponie−
waż potencjometr zastąpiliśmy dwoma re−
zystorami stałymi, to napięcie na wejściu
wzmacniacza błędu pozostanie nie zmie−
nione i prąd na wyprowadzeniach będzie
płynął aż do momentu przywrócenia pier−
wotnego położenia manipulatora.
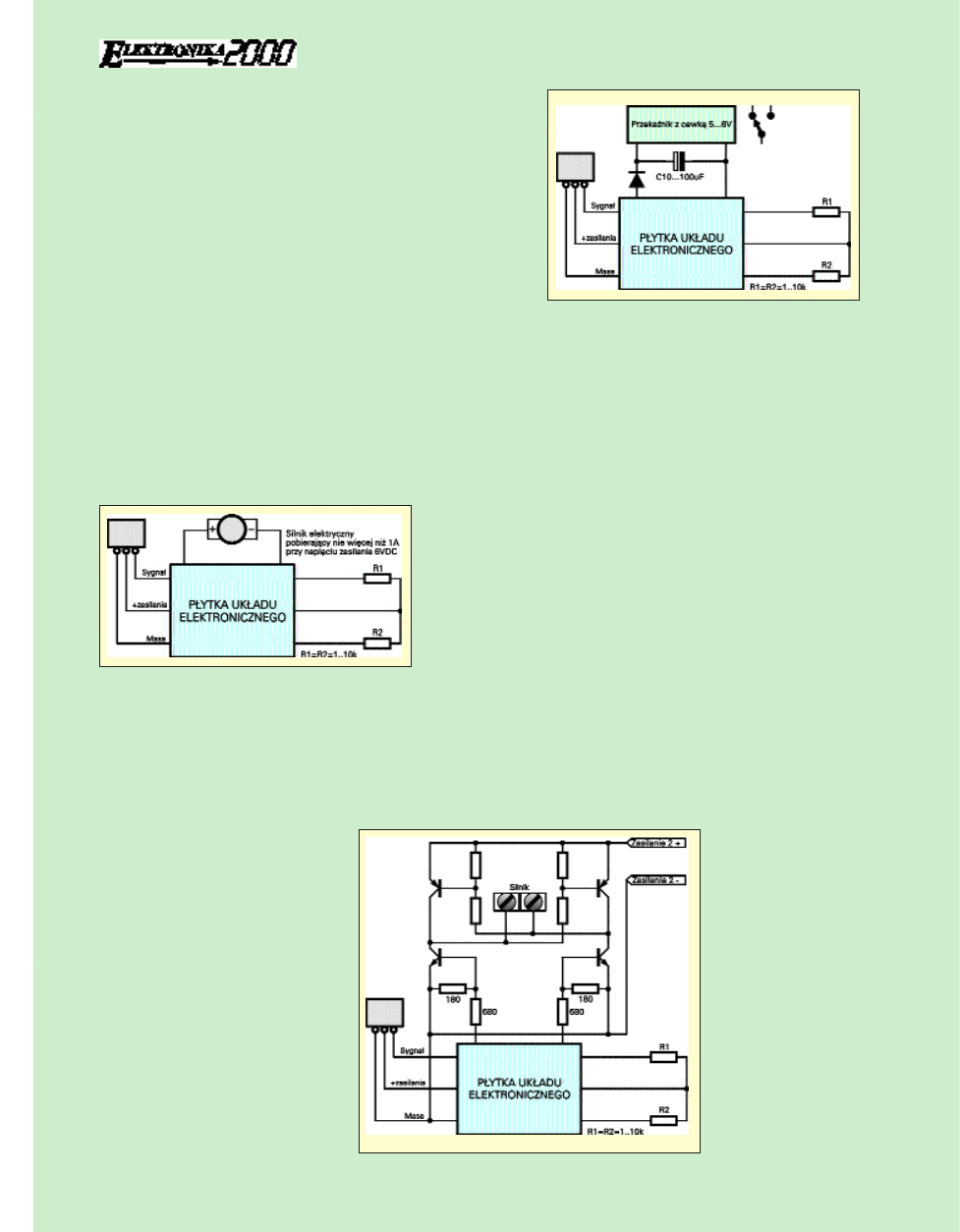
Na rysunku 2 pokazano sposób dołącze−
nia przekaźnika do przerobionego elektro−
nicznego sterownika serwa. Typ przekaźni−
ka jest w zasadzie dowolny,
ważne jest jedynie aby posia−
dał on cewkę dostosowaną do
zasilania napięciem 5 6VDC.
Zastosować należy jedynie
dwa dodatkowe elementy: dio−
dę D1, która powoduje że prze−
kaźnik będzie włączał się jedy−
nie przy wychyleniu drążka ma−
nipulatora w jedną stronę i kon−
densator wygładzający napię−
cie na cewce przekaźnika.
Drugą możliwością jest za−
stosowanie układu do stero−
wania silnikiem elektrycznym
małej mocy (może to być silnik wymonto−
wany z uszkodzonego serwa). Silnik włą−
czamy dokładnie tak samo, jak włączony
był silnik poruszający serwomechanizm,
co pokazano na rry
ys
su
un
nk
ku
u 3
3. Uzyskujemy
w ten sposób możliwość zmiany kierunku
obrotów, zatrzymanie silnika w położeniu
neutralnym drążka manipulatora i regula−
cję szybkości obrotowej (w dość ograni−
czonym zakresie). Silnik dołączony jest
do mostka tranzystorowego
znajdującego się wewnątrz
struktury niezidentyfikowane−
go układu scalonego. Wszyst−
kie zjawiska będą zachodziły
podobnie, jak w przypadku
sterowania
przekaźnikiem,
z dwoma wyjątkami. Po pier−
wsze silnik będzie mógł obra−
cać się w dwóch kierunkach
i zatrzymywać się w położe−
niu neutralnym. Po drugie wy−
korzystamy tu jeszcze jedną,
nie opisywaną dotąd cechę elektroniczne−
go sterownika serwomechanizmu. Steru−
je on nie tylko kierunkiem obrotów silnika
i jego zatrzymywaniem. Silnik może obra−
cać się ze zmienną prędkością, regulowa−
ną za pomocą metody PWM. Im sygnał
błędu pochodzący z porównania napięcia
na potencjometrze i sygnałem wejścio−
wym będzie większy, tym szybciej silnik
będzie się obracał. Co z tego wszystkiego
wynika? Ano to, że otrzymaliśmy właśnie
zupełnie przyzwoity sterownik silnika na−
pędowego do modelu pojazdu kołowego
lub pływającego, i to dość niewielkim
kosztem! Oczywiście, silnik taki może zo−
stać zastosowany w dowolnym innym
urządzeniu sterowanym zdalnie metodą
proporcjonalną. Jedyny ograniczeniem
jest to, że silnik musi być zasilany napię−
ciem z przedziału 4,8 ... 6VDC i nie może
pobierać większego prądu niż 0,5A (1A
przez krótkie momenty). Jest to na tyle
poważne ograniczenie, redukujące moc
silnika do praktycznie 3W, że warto po−
myśleć, czy nie dałoby się czegoś na to
poradzić. Można, i to jest właśnie ta trze−
cia możliwość wykorzystania sprawnego
układu elektronicznego wyjętego z uszko−
dzonego serwomechanizmu.
Schemat proponowanego rozwiązania
został pokazany na rry
ys
su
un
nk
ku
u 4
4. Ale uwaga,
układ pokazany na schemacie nie jest pro−
jektem AVT, ale jedynie propozycją popar−
tą wystarczającą ilością doświadczeń
praktycznych. Sterownik silników elekt−
rycznych o mocy do kil−
kuset watów pracują−
cych w układach stero−
wanych w systemie pro−
porcjonalnym (m. in.
w samolotach o napę−
dzie elektrycznym) jest
obecnie w ostatnim sta−
dium opracowywania,
a układ o którym mówi−
my dzisiaj jest jedynie
rozwiązaniem
zastęp−
czym, awaryjnym. Nie
będziemy więc zajmo−
wać się szczegółową
analizą schematu, ponie−
waż sądzę, że Czytelnicy
EdW wiedzą już dosta−
tecznie dużo o budowie
serwomechanizmów,
aby go zrozumieć.
Z
Zb
biig
gn
niie
ew
w R
Ra
aa
ab
be
e
E
LEKTRONIKA DLA WSZYSTKICH 9/98
64
R
Ry
ys
s.. 4
4..
R
Ry
ys
s.. 2
2..
R
Ry
ys
s.. 3
3..
Wyszukiwarka
Podobne podstrony:
2015 08 20 07 55 33 01
2015 08 20 08 20 33 01
Hakin9 33 (01 2008) PL
2015 08 20 07 55 33 01
Eichschein zu 33 01 00 00 009
Eichschein zu 33 01 00 00 007
33 01 00 00 xxx Eichaufnahme (2) doc
Hakin9 33 (01 2008) PL
2015 04 09 08 27 33 01
Eichschein zu 33 01 00 00 005
Eichschein zu 33 01 00 00 007
Eichschein zu 33 01 00 00 006
Eichschein zu 33 01 00 00 006
Eichschein zu 33 01 00 00 006
2015 04 09 08 25 33 01
2015 08 20 08 20 33 01
33 01 00 00 xxx Eichaufnahme o L doc
Eichschein zu 33 01 00 00 006
więcej podobnych podstron