
Algorytmy planowania
dostępu do dysku
Wykonali:
Izabela Błońska
Dawid Michalski
Michał Krause
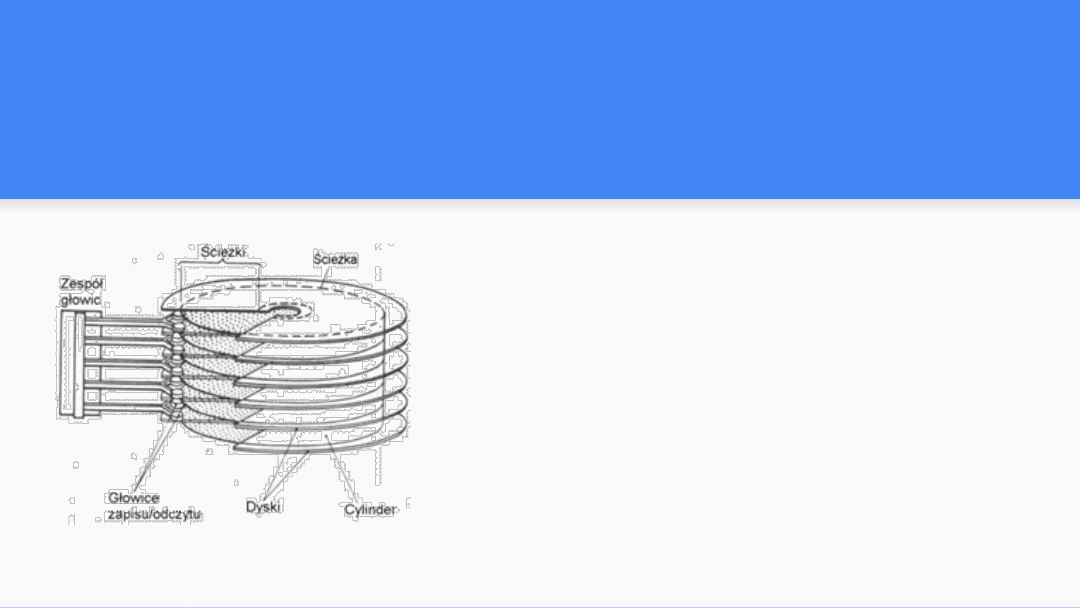
Budowa dysku twardego
Dysk twardy składa się z zamkniętego w
obudowie, wirującego talerza (dysku) lub
zespołu talerzy, wykonanych najczęściej ze
stopów aluminium, o wypolerowanej
powierzchni, pokrytej nośnikiem magnetycznym
o grubości kilku mikrometrów, oraz z głowic
elektromagnetycznych umożliwiających zapis i
odczyt danych. Na każdą powierzchnię talerza
dysku przypada po jednej głowicy odczytu i
zapisu.
Czasy poszczególnych etapów
T
1
- ustawienie głowicy
T
2
- obrót powierzchni
T
3
- odczyt sektora
T
1
>>T
2
>>T
3
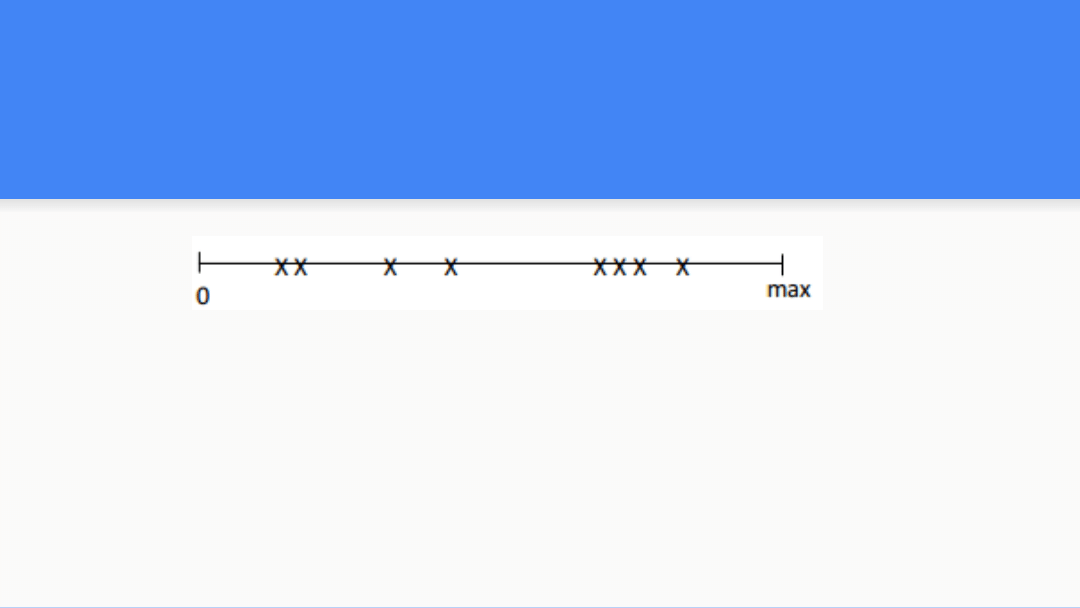
Jak system operacyjny widzi dysk
twardy?
System operacyjny widzi dysk twardy jako ciąg
liniowo uporządkowanych sektorów. Numerowanie
jest takie, że dostęp do 2 adresów położonych blisko
siebie jest jak najkrótszy.
Obiekt zgłoszenie
Proponowane pola obiektu zgłoszenie:
cylinder - numer cylindra na którym jest sektor do odczytu/zapisu
czasZgłoszenia - czas kiedy pojawia się dane zgłoszenie
czyPriorytet - pole określające czy dane zgłoszenie ma deadline
deadline - czas w jakim musi zostać wykonane dane zgłoszenie
Algorytm FCFS(First Come First Served)
algorytm zakładający, że kolejność wykonywania zamówień jest
zgodna z ich dołączeniem. Jest najprostszy, lecz posiada wiele wad.
Algorytm FCFS(First Come First Served)
Zalety:
•
Prosty w implementacji
Wady:
•
Nadmierny, chaotyczny ruch głowic czytająco-piszących
•
Długi czas przesyłania bloków
•
Przyspiesza zużycie mechanizmu dysku
Algorytm FCFS(First Come First Served)
1. Ustaw pozycję głowicy oraz sumę przemieszczeń głowicy na zero.
2.Dopóki są zlecenia do obsłużenia, wykonuj:
2.1. Sprawdź, czy są zlecenia pojawiające się w danej chwili. Jeżeli
są, dodaj je
do kolejki.
2.2. Wybierz z kolejki pierwsze zlecenie.
2.3. Do sumy przemieszczeń dodaj odległość między wybranym
sektorem, a
aktualną pozycją głowicy.
2.4. Zmień pozycję głowicy na wybrany sektor.
2.5. Odczytaj lub zapisz dane do sektora.
3. Zwróć sumę przemieszczeń głowicy czytająco–piszącej.
Algorytm SSTF (Shortest-Seek-Time-
First)
algorytm szeregowania zadań, który zakłada, że w pierwszej
kolejności wykonuje się zamówienia odnoszące się do ścieżki
najbliższej bieżącemu położeniu głowicy. SSTF jest algorytmem
bliskim optymalnego. Suma przemieszczeń głowicy jest bardzo niska,
ponieważ wykonujemy ruchy tylko do najbliższego sektora, który
należy odczytać.
Algorytm SSTF (Shortest-Seek-Time-
First)
Zalety:
•
Mała suma przemieszczeń głowicy czytająco - piszącej, co
wydłuża czas działania dysku
•
Średni czas oczekiwania na odczyt/zapis jest mały
Wady:
•
Istnieje możliwość zagłodzenia zleceń, jeżeli do bufora będzie
dodawane dużo zleceń blisko aktualnej pozycji głowicy
Algorytm SCAN
Algorytm w którym głowica rozpoczyna pracę od jednej krawędzi
dysku i przemieszcza się w kierunku krawędzi przeciwległej
obsługując zamówienia z kolejki. Po dotarciu do krawędzi dysku
zmienia się kierunek ruchu głowicy, która nieustannie przeszukuje
(skanuje) dysk tam i z powrotem
Algorytm SCAN
Zalety: Jeśli w kolejce pojawi się zamówienie odnoszące się do
cylindra znajdującego się tuż przed głowicą, to zostałoby
zrealizowane natychmiast
Wady: Jeśli w kolejce pojawi się zamówienie odnoszące się do cylindra
znajdującego się tuż za głowicą, to zamówienie to musi poczekać, aż
głowica dojdzie do końca, zmieni kierunek i wróci.
Algorytm C-SCAN
odmiana algorytmu SCAN, w której po dojściu do skrajnej ścieżki
głowica wraca szybko do ścieżki przeciwległej, bez realizowania
zamówień, gdyż tam mogło dojść do największego zagęszczenia
zamówień-skanowanie w jednym kierunku.
Algorytm C-SCAN
Zalety:
•
Zmniejszone maksymalne opóźnienie związane z nowymi
żądaniami
Algorytm C-SCAN
1. Ustaw pozycję głowicy oraz sumę przemieszczeń głowicy na zero.
2.Dopóki są zgłoszenia do obsłużenia, wykonuj:
2.1. Sprawdź, czy są zgłoszenie pojawiające się w danej chwili. Jeżeli są, dodaj je do kolejki.
2.2. Jeśli głowica nie znajduje się na skrajnej ścieżce,wybierz z kolejki zlecenie odczytania
cylindra, który znajduje się najbliżej głowicy, lecz po stronie zgodnej z jej ruchem.
2.3. W przeciwnym przypadku(jeśli głowica znajduje się na skrajnej ścieżce, wybierz z kolejki
zgłoszenie znajdujące się najdalej(na samym początku))
2.4. Do sumy przemieszczeń dodaj odległość między wybranym cylindrem, a aktualną pozycją
głowicy.
2.5. Zmień pozycję głowicy na wybrany cylinder.
2.6. Odczytaj lub zapisz dane do cylinder.
3. Zwróć sumę przemieszczeń głowicy czytająco–piszącej.
Algorytm EDF (Earliest Deadline First)
algorytm szeregowania zadań wykorzystywany w twardych
systemach czasu rzeczywistego. Zasada jego działania opiera się o
kolejkę priorytetową, w której pierwszeństwo mają zlecenia najbliższe
do swojego deadline’u. W pierwszej kolejności wykonywane są
zlecenia, które muszą zostać wykonane jak najszybciej. Jeżeli
wszystkie zlecenia z deadlinem zostały wykonane, kolejne są
obsługiwane algorytmem FCFS, czyli zgodnie z czasem zgłoszenia.
Algorytm EDF (Earliest Deadline First)
Zalety:
•
Jest konieczny w twardych systemach czasu rzeczywistego.
•
Gwarantuje jak najszybsze wykonanie zleceń z ograniczeniem
czasowym.
Wady:
•
Pozostałe zlecenia (nie mające ograniczenia czasowego) mogą
zostać zagłodzone, jeżeli do bufora będzie dodawane dużo zleceń
czasu rzeczywistego
•
Suma przemieszczeń głowicy czytająco – piszącej duża, ponieważ
po drodze będziemy mijać zlecenia bliższe położeniu głowicy, które
nie będą obsługiwane
Algorytm FD-SCAN
Algorytm działający na podobnej zasadzie co SCAN jednak zgłoszenia
priorytetowe mają pierwszeństwo. W przypadku ich wystąpienia
głowica zmierza w stronę priorytetu z najkrótszą granicą czasową,
wykonując po drodze kolejne zgłoszenia.
Document Outline
- Slide 1
- Budowa dysku twardego
- Czasy poszczególnych etapów
- Jak system operacyjny widzi dysk twardy?
- Obiekt zgłoszenie
- Algorytm FCFS(First Come First Served)
- Algorytm FCFS(First Come First Served)
- Algorytm FCFS(First Come First Served)
- Algorytm SSTF (Shortest-Seek-Time-First)
- Algorytm SSTF (Shortest-Seek-Time-First)
- Algorytm SCAN
- Algorytm SCAN
- Algorytm C-SCAN
- Algorytm C-SCAN
- Algorytm C-SCAN
- Algorytm EDF (Earliest Deadline First)
- Algorytm EDF (Earliest Deadline First)
- Algorytm FD-SCAN
Wyszukiwarka
Podobne podstrony:
Algorytmy planowania dostępu do procesora
Jak uzyskać dostęp do dysku exFat w Windows XP
32 bitowy dostęp do twardego dysku w Linuksie
dostep do informacji publicznej Nieznany (2)
07-02 PAM-Dostęp do Waszego Makro-Ducha i do Waszej Świadomości, ezoteryka
3 Parametry i usługi sieci dostępu do Internetu – teraz i w przyszłości
późniak koszałka,bazy?nych, Dostęp do?z?nych poprzez WWW
Zasady dostępu do informacji sektora publicznego i jej ponownego wykorzystania
Żeglugę kabotażową rozwinęły państwa mające szeroki dostęp do morza doc
Metody Dostępu Do Internetu
076 Ustawa o dostepie do informacji publicznej
dostep do informacji publicznej Nieznany
Domyślny dostęp do poczty w pracowni szkolnej
projekt sieci LAN z dostępem do Internetu
lista firm uzyskujacych dostep do tajemnicy bankowej
Definiowanie reguł postępowania dla serwera FireWall określających sposób dostępu do wybranych serwe
Blokada dostępu do makr, Dokumenty(1)
04-12 PAM-Dostęp do portali i Miast ze Światła, ezoteryka
więcej podobnych podstron