1.Wstęp
Interfejs Inter IC BUS (I2C BUS) opracowany został przez firmę Philips w celu
synchronicznej komunikacji szeregowej pomiędzy urządzeniami tworzącymi
pewien zestaw modułami w ramach urządzenia jak również układami
scalonymi na płytce drukowanej. Firma opracowała układy kontrolerów
interfejsu szeregowego (SIO) w które wyposaża układy scalone umożliwiając
w ten sposób wykorzystanie interfejsu w układach mikroprocesorowych
sterownikach jednoukładowych sterownikach wyświetlaczy do sterowania
pamięci i układów I/O w cyfrowej syntezie częstotliwości i przetwarzaniu
sygnałów w telekomunikacji sprzęcie elektroakustycznym i video.
Magistrala tegoż interfejsu składa się z dwóch dwukierunkowych lini :
· pierwszej dla sygnału danych (ang. Serial Data - SDA)
· drugiej dla sygnału zegarowego (ang. Serial Clock - SCL).
Magistrala umożliwia przesyłanie danych pomiędzy dwoma dowolnymi
urządzeniami zgodnie ze zdefiniowanym protokołem :
· inicjalizacja transmisji danych może nastąpić tylko gdy magistrala nie jest
zajęta
· podczas transmisji danych sygnał na lini SDA musi być stabilny gdy stan
lini SCL jest wysoki zmiany na SDA podczas wysokiego stanu na SCL są
interpretowane jako sygnały sterujące (start transmisji danych stop transmisji
danych dane ważne).
Każda transmisja inicjowana jest poprzez wystąpienie warunku start i
kończona poprzez wystąpienie warunku stop. Ilość bitów transmitowanych
pomiędzy warunkami nie jest limitowana. Każde z urządzeń rozpoznawane
jest przez unikalny adres przesyłany na początku transmisji. Osiem bitów
reprezentuje adres urządzenia slave natomiast najmniej znaczący bit (LSB)
określa kierunek transmisji. Wszystkie urządzenia po wykryciu warunku 'start'
porównują odebrany adres ze swoim adresem sprzętowym i jeżeli jest on
zgodny adresują się jako odbiornik lub nadajnik. Występują również adresy
własne programowalne oraz adresy rozgłoszeniowe (ang. general cal )
przeznaczone dla wszystkich urządzeń w systemie poprzedzające bajty
określające polecenie. Urządzenia mają oprócz funkcji nadajników i
odbiorników przypisane statusy typu master i slave. MASTER to urządzenie
które inicjuje i prowadzi transmisję danych generując sygnały zegarowe.
SLAVE to dowolne poprawnie zaadresowane urządzenie.
Możliwe są trzy formaty transmisji :
· master - nadawca slave - odbiorca
· master - odbiorca slave - nadawca
· ze zmianą kierunku transmisji.
W trzecim formacie przed każdą zmianą kierunku transmisji musi być
generowany sygnał start adres urządzenia slave oraz nowa wartość bitu
kierunku. Interfejs dopuszcza możliwość przyłączenia do magistrali kilku
urządzeń o statusie master. Aby uniknąć kolizji (obecność kilku urządzeń
sterujących sygnałami na magistrali) w systemie I2C problem ten rozwiązano
stosując arbitraż. Arbitraż oparto na zasadzie kontroli zgodności stanu lini
SDA z wartością logiczną bitu wyprowadzonego przez dane urządzenie.
Odczyty stanu lini SDA odbywają się w ściśle określonych momentach
wyznaczonych sygnałem zegarowym. Jeżeli dwa lub więcej urządzeń stara
się wysłać jednocześnie dane na magistralę to wykorzystując metodę
iloczynu na drucie" pierwsze które wyśle jedynkę utraci kontrolę nad łączem.
Przedstawione rozwiązanie preferuje urządzenie które w trakcie arbitrażu
wysyła najniższą wartość binarną.
Sygnał zegarowy na magistrali generowany jest zawsze przez urządzenie
master nawet gdy urządzenie to odbiera dane. Jedynym przypadkiem gdy
inne urządzenia ingerują w przebieg sygnału zegarowego jest proces
arbitrażu oraz przypadek gdy wolne urządzenie odbiorcze chce obniżyć
szybkość transmisji wymuszając niski poziom na lini SCL.
Obie linie SDA i SCL są liniami dwukierunkowymi połączonymi przez
rezystory podciągające (ang. Pul -up Resistor) do napięcia zasilania 5[V]+-
10[%]. Kiedy szyna jest wolna obie linie są w stanie wysokim. By móc
realizować funkcję wired-AND" stopnie wyjściowe urządzeń dołączonych do
magistrali muszą posiadać wyjścia typu otwarty kolektor lub otwarty dren.
Standardowa szybkość transmisji wynosi 100[kbitów/s] adresując do128
urządzeń. Możliwa jest również praca w trybie szybkim z szybkością
400[kbitów/s] i zaadresowanie 1024 urządzeń. Liczba układów dołączonych
do magistrali zależy jedynie od dopuszczalnej pojemności magistrali -
400[pikoF]. Dopuszcza się przyłączenie do magistrali układów wykonanych w
różnych technologiach (NMOS CMOS bipolarna). Każdy układ posiadający
określone na stałe poziomy napięć wejściowych (maksymalnie 1 5 dla L 3 dla
H) może mieć swoje odrębne źródło zasilania.
W produkcji znajduje się szereg sterowników interfejsu I2CBUS. Przykładem
może być kontroler interfejsu szeregowego (SIO) w mikrokomputerach
rodziny PCF84CXX. Układ SIO pozwala na współpracę wielu urządzeń
realizowaną poprzez wspólną magistralę złożoną z dwóch lini przy czym
komunikacja dwóch dowolnych urządzeń odbywa się bez zakłócania
pozostałych. Komunikacja pomiędzy procesorem mikrokomputera a
sterownikiem interfejsu odbywa się poprzez wewnętrzną magistralę
mikrokomputera oraz przerwanie SIR które pojawia się po skompletowaniu
bajtu. Przesłanie bajtu do/z SIO wykonuje tylko jedna instrukcja. Do
przechowywania danych oraz informacji sterujących działaniem interfejsu
wykorzystuje się cztery rejestry:
· rejestr przesuwający dane
· rejestr statusu
· rejestr sterujący sygnałem CLK
· rejestr adresowy.
Pod względem praktycznym można powiedzieć że magistrala I2C jest
integralną częścią przyrządów sterowanych przez komputer , procesor czy
sterownik i daje możliwość wyświetlenia pełniejszej informacji niż tylko cyfr .
Już od pewnego czasu można zaobserwować ewolucję w kierunku coraz
liczniejszej aparatury, profesjonalnej i nie tylko. To było powodem pojawienia
się na rynku wyświetlaczy alfanumerycznych lecz nie wyposażonych w
interfejs I2C. W niniejszy interfejs można wyposażyć zwykły alfanumeryczny
wyświetlacz LCD.
2. Wyświetlacz alfanumeryczny
Na rys.1 przedstawiony jest schemat blokowy, to co nazywamy
wyświetlaczem LCD , w rzeczywistości zawiera, oprócz samego
wyświetlacza, również zespolone z nim obwody mikrokontrolera. Właściwiej
byłoby zatem mówić o module LCD. Można zastosować wyświetlacz Hitachi
o dwóch wierszach po 40 znaków. Każdy znak mieści się w matrycy o
szerokości 5 i wysokości 8 punktów, z których tylko 7 jest wykorzystywanych
przez większość znaków zawartych w znakowej pamięci ROM. Punkty 8-go
dolnego rzędu, zostały zarezerwowane dla kursora, mogą jednak zostać
wykorzystane w znakach specjalnych jak też w znakach zdefiniowanych
przez odważnego użytkownika. Do sterowania modułem służy specjalny
układ sterujący układ scalony – kontroler LCD. Sterownik ten wypełnia
podwójną funkcję sterowania wyświetlaczem i komunikacji z komputerem, w
tym przypadku przez interfejs I2C . Wymiana danych pomiędzy interfejsem i
sterownikiem odbywa się za pośrednictwem tylko 4 bitów, DB4 do DB7.
Wprawdzie sam sterownik może posługiwać się słowami jednobajtowymi( 8
bitów), ale w tym przypadku spowodowało by to niepotrzebną komplikację
interfejsu I2C.
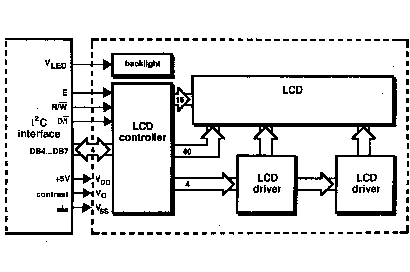
Rys. 1 schemat blokowy ilustrujący koncepcje interfejsu I2C do sterowania
modułem LCD
Poza 4 bitami danych są jeszcze 4 linie poleceń. Znaczenie lini E (enable –
umożliwienie ) i R/W ( read/write – odczyt/zapis) wydaje się oczywiste.
Sygnał D/I (data/instruction – dane/instrukcje) mówi o tym , czy dane obecne
na liniach danych są poleceniem przeznaczonym dla sterownika LCD czy
danymi do wyświetlacza. Czwarta z tych lini , VLED , pozwala wyłączać
podświetlanie (backlight) wyświetlacza, czyli LEDy, które, umieszczone za
ekranem modułu, pobierają 170 mA (maksimum 250 mA) z zasilacza 5V.
Proste porównanie z prądem pobieranym przez właściwy wyświetlacz ( 1mA
– max 3mA), wskazuje , że podświetlanie jest energetyczne dość rozrzutne.
3. Interfejs I2C
Rysunek 2 przedstawia schemat elektryczny układu sterującego
wyświetlaczem, na którym można zauważyć linie magistrali i 8 bitowy układ
wejść/wyjść (E/S) (IC2 – PCF8574). Układ ten jest właściwym interfejsem
magistrali I2C i równocześnie sterownikiem wyświetlacza. Ponieważ pełne 8
bitów PCF8574 nie jest potrzebne dla danych, pozostałe 4 bity zostały
przeznaczone dla poleceń. Zworki A0 do A2 pozwalają zdefiniować adres
zajmujący przez IC2 w magistrali I2C .
Ma to następującą strukturę: 0100 A2 A1 A0 R/W
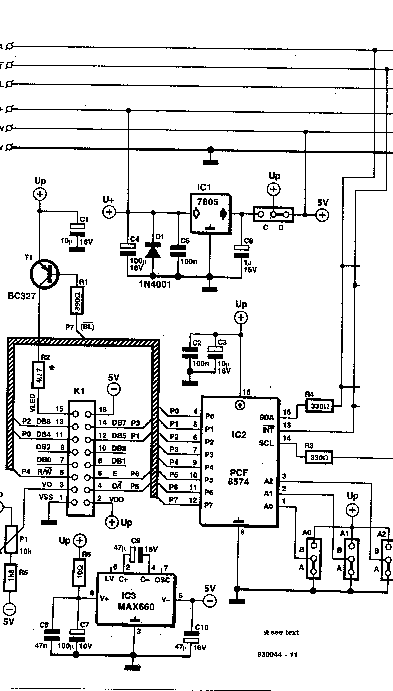
Można także
uznać, że obok IC2, również tranzystor T1 jest częścią interfejsu pomiędzy
magistralą I2C a wyświetlaczem LCD. Tranzystor ten, za pośrednictwem
programu, steruje podświetlaniem ekranu. Rezystor R2 ogranicza prąd LED
podświetlania wyświetlacza LM092LN. Za pośrednictwem zwornika C/D
można wybrać sposób zasilania układu albo z lini +5V, albo z lini +U,
poprzez stabilizator IC1 /należy wsiąść pod uwagę , że pobór prądu przez
układ może osiągnąć około 250mA. Układ IC3 typu MAX660 służy do
wytworzenia napięcia –5V, potrzebnego do regulacji kontrastu wyświetlacza.
Napięcie to jest niezbędne, ponieważ kontrast daje się regulować napięciem
dodatnim. W praktyce okazuje się że przy bardzo ostrych kątach obserwacji
kontrast daje się ustawić dysponując napięciem ujemnym. Optymalne
napięcie doprowadzone do wyprowadzenia V0 może mieć wartość
dochodzącą do 6,5V poniżej napięcia zasilania, co odpowiada –1,5V w
stosunku do masy . Rezystor R5 ogranicza dolne napięcie regulacji kontrastu
P1 do tej wartości.
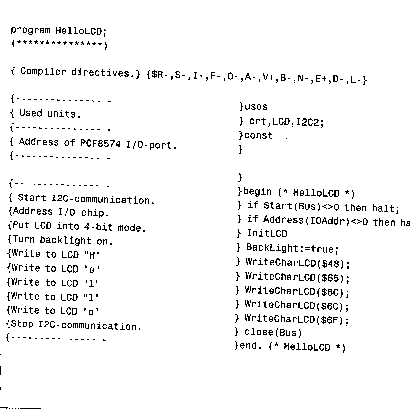
4.Program
Dla posiadaczy komputera PC, znających np. Turbo-Pascal, oprogramowanie
tego układu jest bardzo proste. Wystarczy użyć specjalnej w tym celu
napisanej procedury LCD (LCD unit), nie wgłębiając się w techniczne aspekty
wyświetlacza.
Aby pokazać, w jaki sposób procedura LCD może być użyta w programie na
rysunku powyżej zamieszczony został listing prostego programu, który
powoduje napisanie na wyświetlaczu słowo “Hel o”.
Podstawowym zadaniem
programu jest formułowanie poprawnych (z punktu widzenia kolejności,
poziomów) poleceń i danych do wyświetlania. Interfejs I2C nie robi nic poza
przetwarzaniem strumienia danych szeregowych z magistrali na zrozumiałe
dla wyświetlacza dane równoległe. Program odpowiada za porządek
przekazywanych danych i za kolejność. Na rysunku 4 pokazane są
zależności czasowe związane z procesem odczytu i zapisu danych.
Przekazywanie instrukcji i danych odbywa się zawsze półbajtami (nibble),
poczynając od starszego półbajtu. Na wykresie widać, że zaczyna się od
przesłania instrukcji do wyświetlacza, operacji rozpoczynanej przejściem lini
E (enable) z poziomu wysokiego na niski. W środku przebiegu widać, jak
program może odczytać wskaźnik zajętości BF (bus flag), do której to
informacji dodaje się stan licznika adresu sterownika wyświetlacza. Program
koniecznie musi sprawdzać ten bit przed każdą operacją odczytu lub zapisu.
Przez czas od 40 m s do 16ms, zależnie od przeznaczenia danych, sterownik
jest głuchy na nadchodzące sygnały. Może tylko nastąpić odczyt bajtu ze
wskaźnikiem zajętości. Trzecia część wykresu ilustruje proces odczytu
danych, operacje mogą się odbywać tylko wówczas, gdy linia E jest w stanie
wysokim.
Tabela 2 zawiera wszystkie potrzebne informacje (wraz z binarnymi)
dotyczące liter, cyfr oraz innych znaków( w tym alfabetu japońskiego), które
można otrzymać na wyświetlaczu. Trzeba podkreślić, że najważniejsze litery i
cyfry mają kody odpowiadające kodom ASCII, co znacznie upraszcza pisanie
tekstów na ekranie. W pierwszej kolumnie tabeli, dla czterech starszych bitów
oznaczonych 0000, widać 8 cyfr w nawiasach. Oznaczają one 8 znaków (jest
ich tylko 8) definiowanych przez użytkownika. W tym celu zarezerwowano
trochę miejsca w RAM sterownika LCD, zwanej CGRAM (Character
Generator RAM). Jeżeli ten obszar Ramu nie jest używany do
przechowywania własnych znaków, to może on zostać użyty do
przechowywania danych. Potrzebne informacje do, odpowiadające
poszczególnym pozycjom wyświetlacza, dotyczące umiejscowienia w pamięci
RAM wyświetlanych danych (DDRAM, Display Data RAM), są zebrane w
tabeli 3.
Wyszukiwarka
Podobne podstrony:
programator pamięci I2C
Mikrokontrolery STM32 Użycie interfejsu I2C, USART, SPI
AVT 5321 Szukacz i tester układów na magistrali I2C
AKiSO SS wykład 8 I2C SPI 1W CAN
Zegar czasu rzeczywistego sterowany szyną I2C
Miagistrala i2c
6 magistrala I2C
i2c to keyboard interface
I2C Multiplexer
I2C bus specificaion 2000 id 20 Nieznany
I2C Bus Implementierung
i2c
I2C
Magistrala I2C 10 id 276712 Nieznany
I2C Interface fuer Druckerschnittstelle
I2C BUS SPECIFICATION 2
i2c slave mode
Copieur I2C 24C01 24C16
więcej podobnych podstron