O programowaniu ruchów roboczych osprz´tu maszyn do robót ziemnych JULIAN CENDROWICZ
LESZEK P¸ONECKI
KAZIMIERZ SOKO¸OWSKI
WIES¸AW TRÑMPCZY¡SKI
Wa˝nym zagadnieniem w budowie maszyn do walajàce na programowanie ruchów osprz´tu, jak robót ziemnych wyposa˝anych w systemy mecha-i zaplanowaç dzia∏anie systemu w celu wykonania troniczne w celu automatyzacji ruchów roboczych pozosta∏ych wymienionych zadaƒ. Programowanie ich osprz´tów jest zastosowanie w tych systemach ruchów osprz´tu w systemie wspomagania opera-odpowiednich metod programowania ruchów. Uk∏atora musi byç realizowane z wykorzystaniem metod dy mechatroniczne w dost´pnych obecnie na rynku uwzgl´dniajàcych specyfik´ maszyn do robót ziem-maszynach do robót ziemnych stosowane sà g∏ównie nych oraz wymienione zadania systemu.
do monitorowania i sterowania silnikiem i uk∏adem Nale˝y w zwiàzku z tym zaproponowaç metody hydraulicznym oraz jako uk∏ady monitorowania programowania umo˝liwiajàce:
osprz´tu i uk∏ady zabezpieczeƒ. Uk∏ady automaty-1. Rozpoczćie zaprogramowanego ruchu osprz´tu zujàce ruchy robocze w maszynach katalogowych z dowolnego punktu przestrzeni roboczej maszyny.
oferowane sà rzadziej, mimo ˝e systemy takie na 2. Deklarowanie pr´dkoÊci i innych parametrów targach i wystawach pokazywane sà od d∏u˝szego ruchu zarówno dla poszczególnych nap´dów, jak czasu (przyk∏adowo koparki: FUTURE firmy Orenstein i narz´dzia skrawajàcego.
& Köppel – rok 1983 czy Komatsu PF 55L – rok 1989) 3. Tworzenie rozga∏źionej struktury programu oraz
[1, 2]. Brak autonomicznych, zrobotyzowanych ma-stosowanie p´tli.
szyn do robót ziemnych wynika przede wszystkim 4. Wykorzystanie sygna∏ów wyst´pujàcych pod-z trudnoÊci wypracowania koncepcji zastosowania czas urabiania oÊrodka, zw∏aszcza si∏, co odpowiada takich maszyn w sposób przynoszàcy korzyÊci eko-sterowaniu typu si∏a – przemieszczenie.
nomiczne, kompensujàce bardzo wysokie w porów-5. Uwzgl´dnianie ograniczeƒ dotyczàcych zarówno naniu z maszynami klasycznymi koszty samej ma-realizacji okreÊlonych zadaƒ (korekcja trajektorii), jak szyny oraz jej eksploatacji [2]. Zatem obecnie realne i zabezpieczenia maszyny.
jest wprowadzenie uk∏adów automatyzujàcych ruchy 6. PrzejÊcie na rćzne sterowanie osprz´tem w do-robocze osprz´tu jako elementów systemu wspoma-wolnym momencie na ˝àdanie operatora lub prog-gania operatora pracujàcego bezpoÊrednio w ma-ramowo.
szynie lub przy zdalnym jej sterowaniu [1, 2].
Wymienione zasady, wed∏ug których nale˝y opra-Dotychczasowe prace dotyczàce sterowania ru-cowaç sposoby programowania ruchów osprz´tu, chami roboczymi osprz´tu pozwoli∏y na okreÊlenie wskazujà na ma∏à mo˝liwoÊç stosowania metod ogólnej zasady wspomagania operatora polegajàcej wykorzystywanych do programowania klasycznych na takim wspó∏dzia∏aniu operatora i systemu ste-robotów przemys∏owych [3, 4]. W artykule przed-rowania, przy którym ruchami osprz´tu steruje bez-stawiona zostanie metoda programowania ruchów poÊrednio operator, zaÊ system cyfrowy koryguje roboczych osprz´tu jako zbioru tzw. ruchów ele-w razie potrzeby jego dzia∏ania oraz na rozkaz ope-mentarnych, spe∏niajàca wymienione wymagania.
ratora realizuje automatyczne sterowanie osprz´tem.
Zastosowanie takiej zasady dzia∏ania ma pozwoliç Zasady programowania
m.in. na:
– automatyczne odtwarzanie zaprogramowanych Opracowana metoda programowania polega na lub zapami´tanych ruchów osprz´tu, potraktowaniu ruchu roboczego osprz´tu koniecz-
– koordynacjŕuchów kilku si∏owników osprz´tu nego do wykonania przewidywanego zadania jako dla realizacji trajektorii niemo˝liwych do wykonania zbioru tzw. ruchów elementarnych.
przy sterowaniu rćznym,
Ruch elementarny scharakteryzowany jest przez
– automatycznà korekcjŕuchów osprz´tu, równie˝
zbiór parametrów okreÊlajàcych sposób dzia∏ania przy sterowaniu rćznym, np. dla ominićia prze-poszczególnych nap´dów osprz´tu lub zbiór wielkoÊci szkody czy uwzgl´dnienia ró˝nego rodzaju ogra-okreÊlajàcych parametry ruchu narz´dzia czy cha-niczeƒ,
rakter jego oddzia∏ywania z urabianym oÊrodkiem.
– automatycznà realizacj´ trajektorii spe∏niajàcych Ka˝dy ruch elementarny ma tak˝e okreÊlony co naj-za∏o˝one kryteria, np. korzystnych energetycznie.
mniej jeden warunek jego zakoƒczenia i przejÊcia do Budujàc system sterowania ruchami roboczymi ruchu nast´pnego. Dopuszczenie kilku warunków osprz´tu, nale˝y zarówno opracowaç procedury poz-przejÊcia pozwala na rozga∏źienie procedury. Zastosowanie licznika umo˝liwia tworzenie p´tli.
Mgr in˝. Julian Cendrowicz, mgr in˝. Kazimierz So-W systemie wspomagania operatora komunika-ko∏owski i prof. dr hab. in˝. Wies∏aw Tràmpczyƒski sà cja operator – system jest realizowana przez panel pracownikami Katedry Geotechniki Politechniki Âwi´-
systemu sterowania lub ekran monitora. Stàd do tokrzyskiej, a prof. ndz. dr hab. in˝. Leszek P∏onecki jest pracownikiem Centrum Laserowych Technologii Metali realizacji omawianej metody programowania opra-Politechniki Âwi´tokrzyskiej.
cowano procedury pozwalajàce na tworzenie tablicy ROK WYD. LXV O ZESZYT 1/2006
1 1
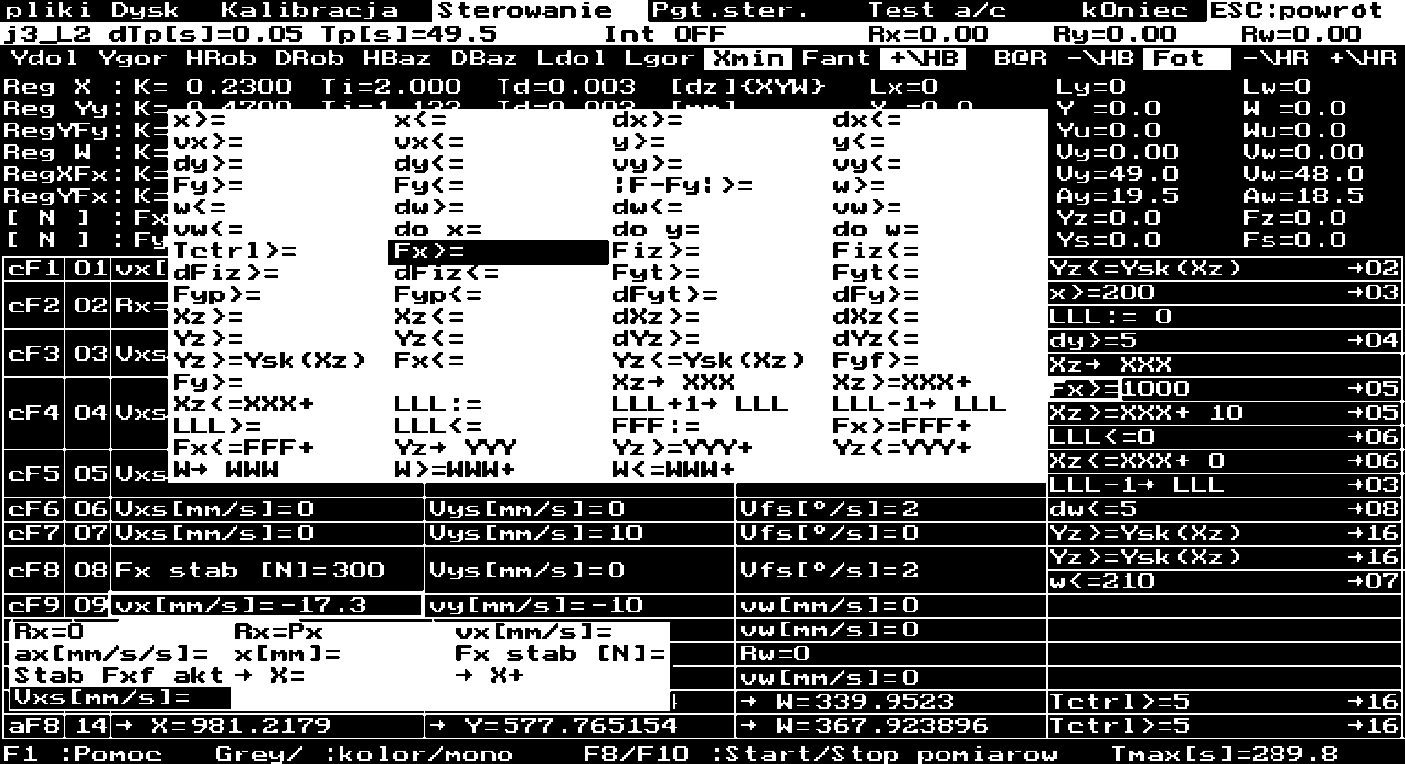
Rys. 1. Tablica – ekran operatora z pokazanymi wielkoÊciami wy-korzystywanymi podczas progra-
mowania
przedstawionej na rys. 1 w
wersji przeznaczonej dla
stanowiska z osprz´tem typu
∏adowarkowego [5], którego
nap´dy realizujà ruch po-
ziomy (x), pionowy (y) oraz
obrót ∏y˝ki (w). Nap´dom
tym odpowiadajà kolumny
tablicy. Poszczególne wiersze
tablicy okreÊlajà natomiast
poszczególne ruchy elemen-
tarne. Dla ka˝dego nap´du
i wiersza w tablicy mo˝na
przyjàç wielkoÊci cechujàce
dany ruch. Sà to m.in. pr´dkoÊç, przemieszczenie, si∏owników lub na z´bach ∏y˝ki) czy sygna∏ z poten-si∏a (wówczas dla danego nap´du dzia∏a uk∏ad sta-cjometru pulpitu sterowniczego (sterowanie rćzne).
bilizacji si∏y z sygna∏em sprz´˝enia zwrotnego z uk∏a-Ostatnia kolumna s∏u˝y do okreÊlania warunków du pomiaru si∏y na t∏oczyskach poszczególnych przejÊcia do innego wiersza tablicy. Warunki te mo-gà byç opisane m.in. war-
toÊciami po∏o˝eƒ poszcze-
gólnych si∏owników, przy-
rostów po∏o˝eƒ, pr´dkoÊci,
si∏ lub ich przyrostów, wspó∏-
rz´dnych z´bów ∏y˝ki czy
wskazaƒ licznika. W sumie
mogà zostaç wykorzystane
wartoÊci ponad 20 wielkoÊci.
Mo˝na podaç kilka wielkoÊci
dla danego wiersza (wów-
czas przejÊcie nastàpi po
spe∏nieniu któregoÊ z wa-
runków), koniunkcje lub al-
ternatywy warunków. Wy-
korzystanie sygna∏u z liczni-
ka pozwala na wielokrotnà
realizacj´ jednego lub kilku
ruchów elementarnych. Mo˝-
liwe do deklarowania wiel-
koÊci pokazano na rys. 1 na
zaczernionych polach. Ruch
narz´dzia mo˝na wywo∏y-
waç od dowolnego wiersza
w tablicy. Tablica zawiera te˝
wiele innych informacji, do-
tyczàcych m.in. parametrów
regulatorów czy ograniczeƒ
wartoÊci si∏ i pr´dkoÊci.
Omówiony sposób prog-
ramowania ruchów robo-
czych osprz´tu w∏àczono do
cyfrowego, laboratoryjnego
systemu sterowania osprz´-
tem koparki K-111 [2] oraz
systemu sterowania stano-
wiskiem z osprz´tem typu
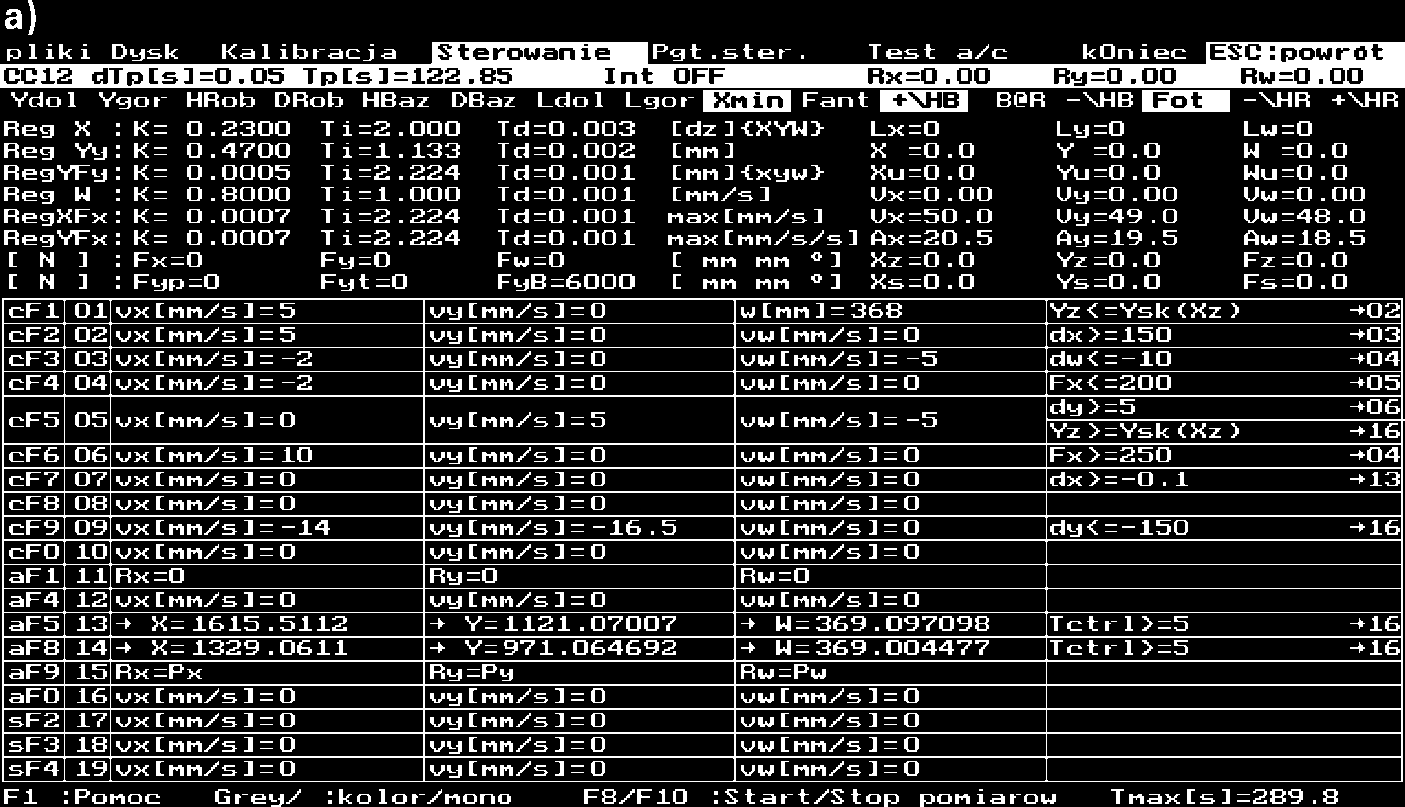
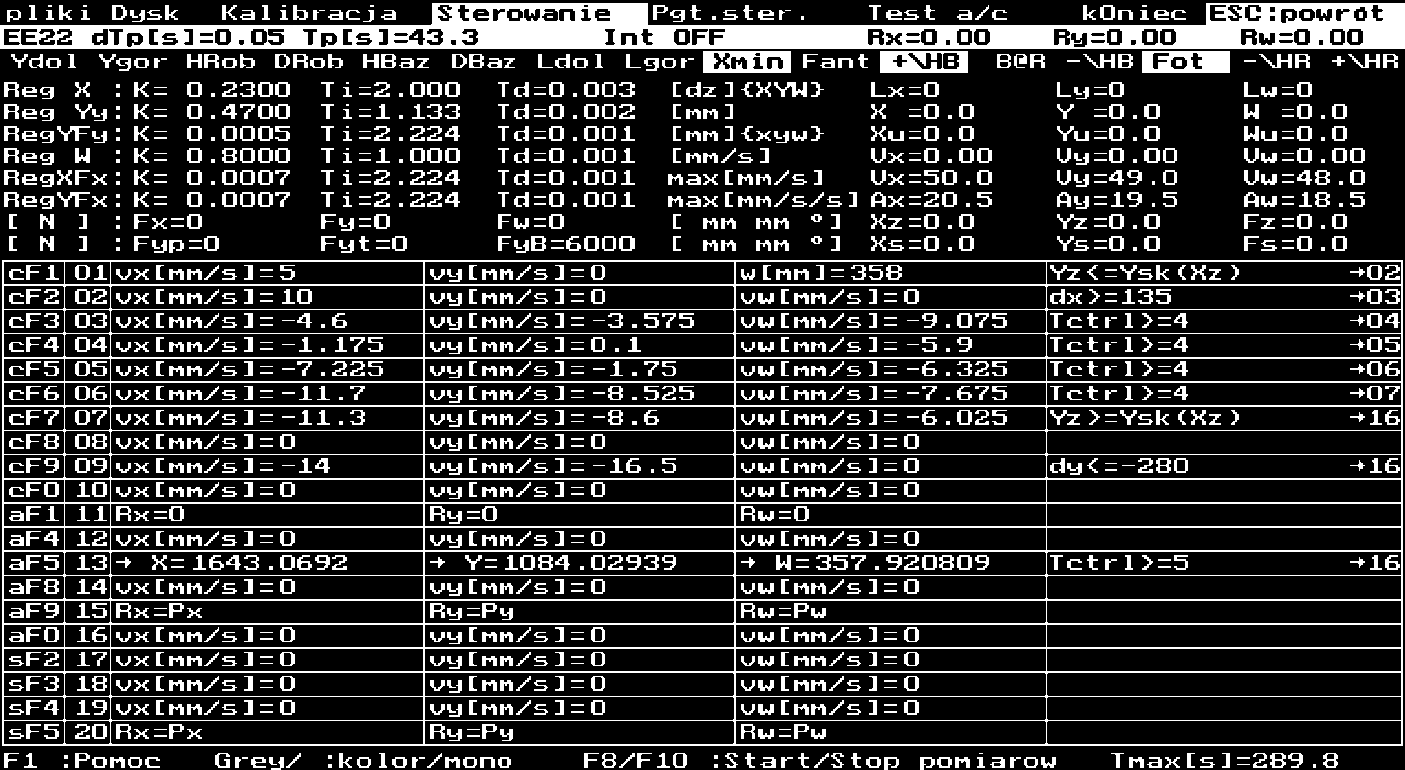
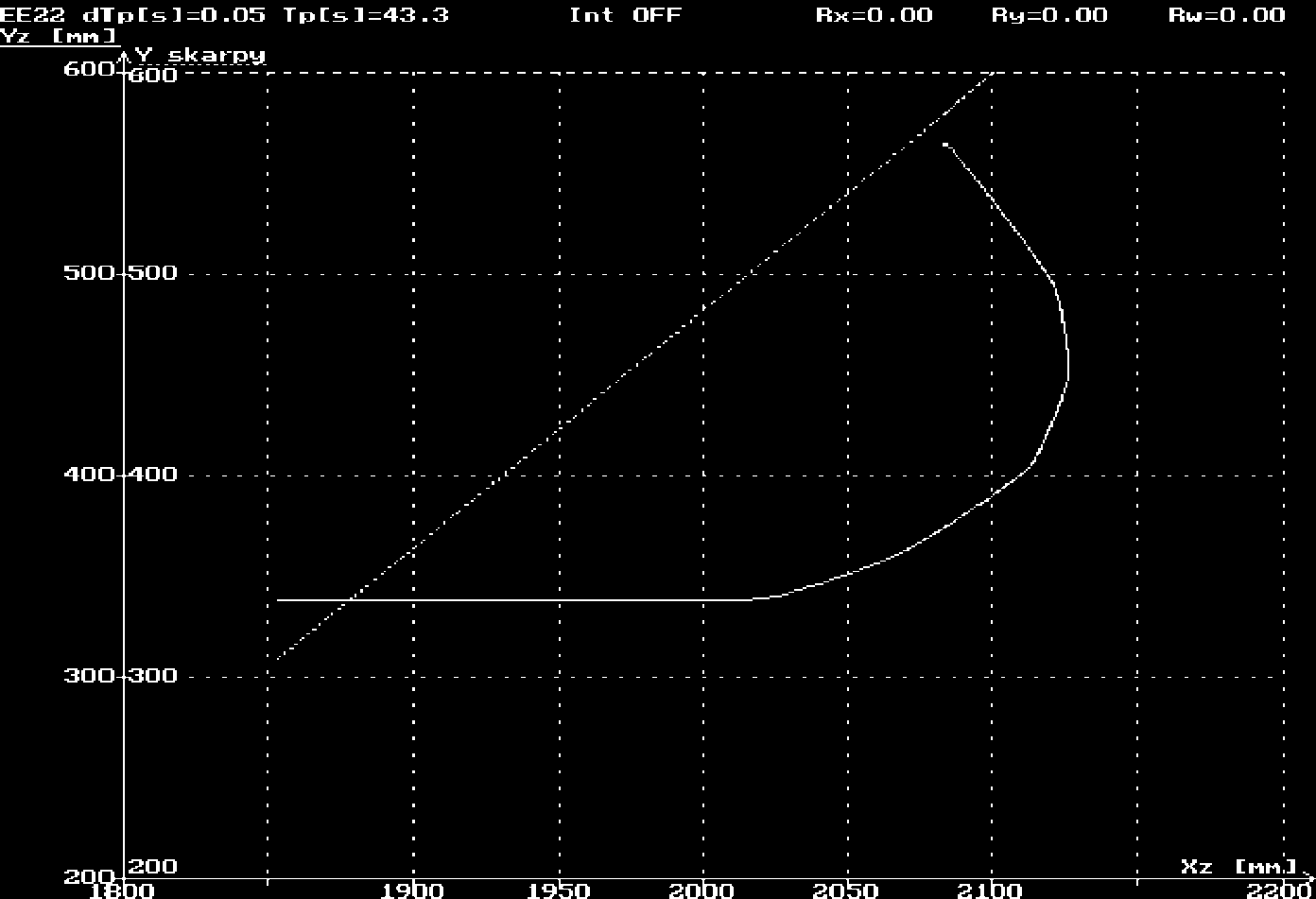
Rys. 2. Realizacja automatyczne-
go ruchu narz´dzia wzd∏u˝ linii
poÊlizgu dla stanowiska z osprz´-
tem typu ∏adowarkowego, a) tabli-
ca z programem, b) tor narz´dzia
i zarys skarpy
1 2
ROK WYD. LXV O ZESZYT 1/2006
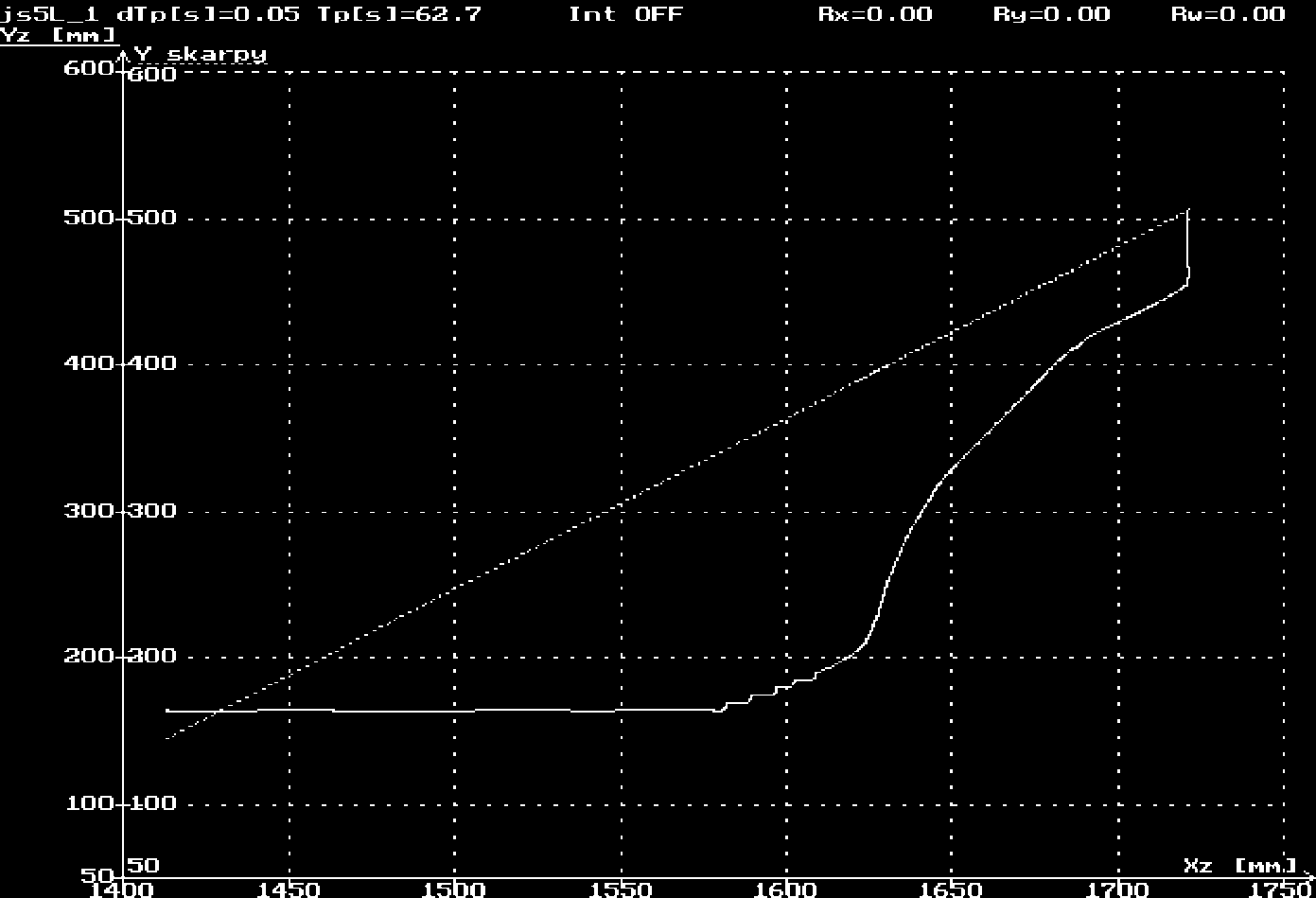
∏adowarkowego [5]. W dalszej cz´Êci artyku∏u przed-powstanie linii poÊlizgu. Ta faza ruchu by∏a zapro-stawiono przyk∏ady zastosowania omówionej metody gramowana. Nast´pnie realizowany by∏ automa-programowania ruchów roboczych.
tycznie ruch wzd∏u˝ linii poÊlizgu z wykorzystaniem dwóch nastawionych wartoÊci si∏y na z´bach ∏y˝ki.
Przyk∏ady zastosowania metody
Narz´dzie porusza∏o si´ poziomo a˝ do przekroczenia programowania
zadanej wartoÊci si∏y, po czym wycofywa∏o si´ (co wiàza∏o siźe spadkiem si∏y a˝ do drugiej nasta-Opracowana metoda zosta∏a wykorzystana w wielu wianej wartoÊci), a potem przemieszcza∏o si´ piono-badaniach prowadzonych z wykorzystaniem obu wo z jednoczesnym obrotem o ustalone wartoÊci.
stanowisk laboratoryjnych. Przedstawione w artykule Nast´pnie realizowany by∏ kolejny ruch poziomy przyk∏ady wybrano dla pokazania mo˝liwoÊci metody i w efekcie narz´dzie porusza∏o siśchodkowo oraz potwierdzenia spe∏niania przez nià omówionych wzd∏u˝ linii poÊlizgu. Wprowadzenie zarysu skarpy wczeÊniej wymagaƒ.
(wiersze 13, 14 na rys. 2a) pozwala na uniknićie Pierwszy z przyk∏adów (rys. 2) dotyczy automa-ruchu narz´dzia poza oÊrodkiem. W maszynie rze-tycznego ruchu narz´dzia skrawajàcego z osprz´tem czywistej w takiej sytuacji system prze∏àczy∏by sińa
∏adowarkowym wzd∏u˝ linii poÊlizgu wywo∏anej rćzne sterowanie osprz´tem. Zarys skarpy wprow oÊrodku spoistym (trajektoria korzystna energe-wadzany by∏ tak˝e w kolejnych testach.
tycznie [6]). Ruch wzd∏u˝ tej linii, na granicy której W przypadku osprz´tu koparki K-111 automatyczny wyst´puje wyraêna zmiana spójnoÊci oÊrodka, reali-ruch wzd∏u˝ linii poÊlizgu realizowany by∏ z wy-zowany by∏ z wykorzystaniem sygna∏u si∏y na z´bach korzystaniem dwóch algorytmów. Pierwszy z nich
∏y˝ki. Narz´dzie wprowadzane by∏o poziomo w oÊro-powodowa∏ naprzemienne ruchy si∏ownika ramienia dek, a nast´pnie przez obrót ∏y˝ki wywo∏ywano a˝ do przekroczenia nastawionej wartoÊci si∏y na a)
b)
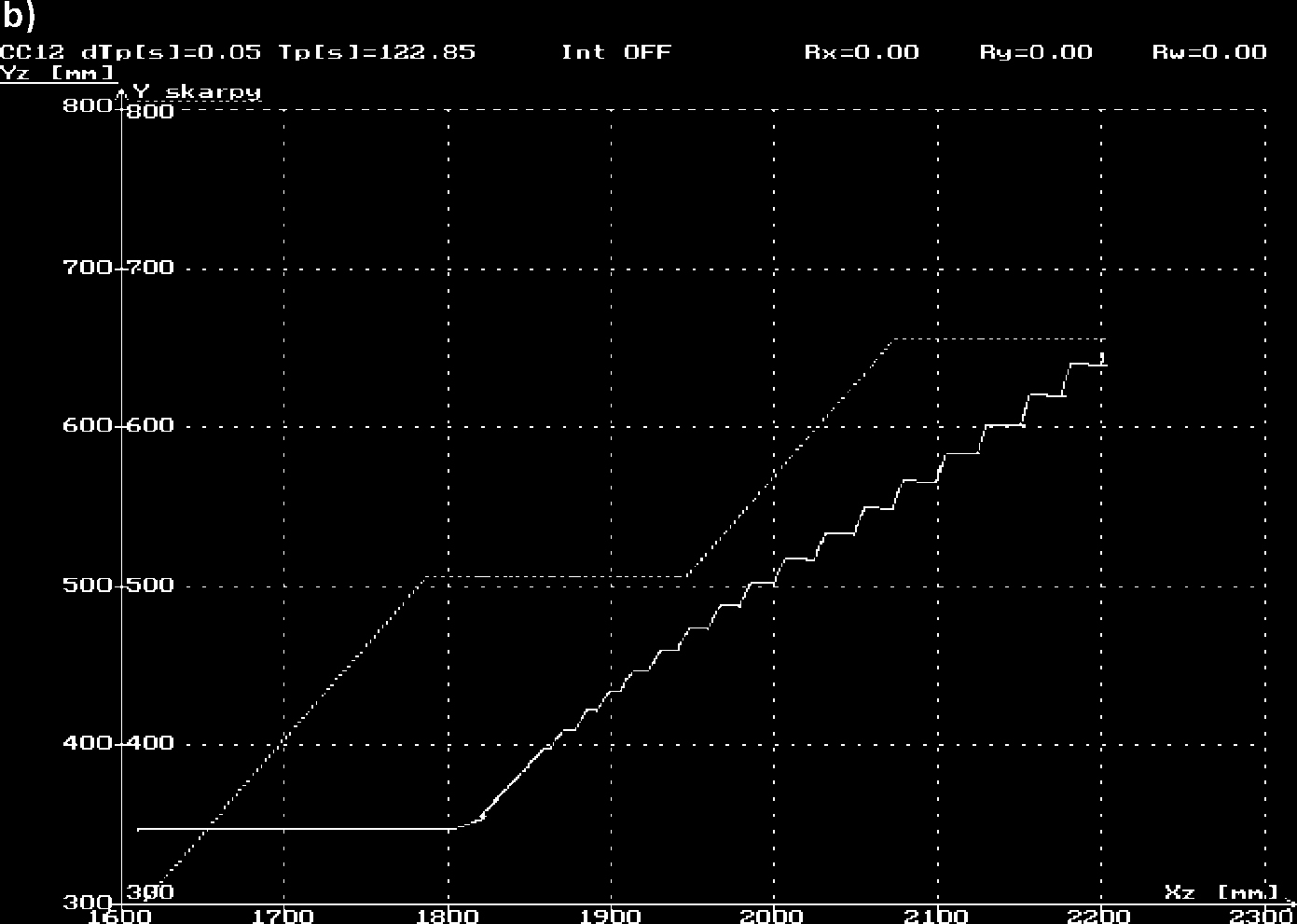
Rys. 3. Realizacja schodkowego nape∏niania ∏y˝ki ∏adowarki ze sta∏à si∏à naporu: a) tablica z programem, b) tor narz´dzia i zarys skarpy
ROK WYD. LXV O ZESZYT 1/2006
1 3
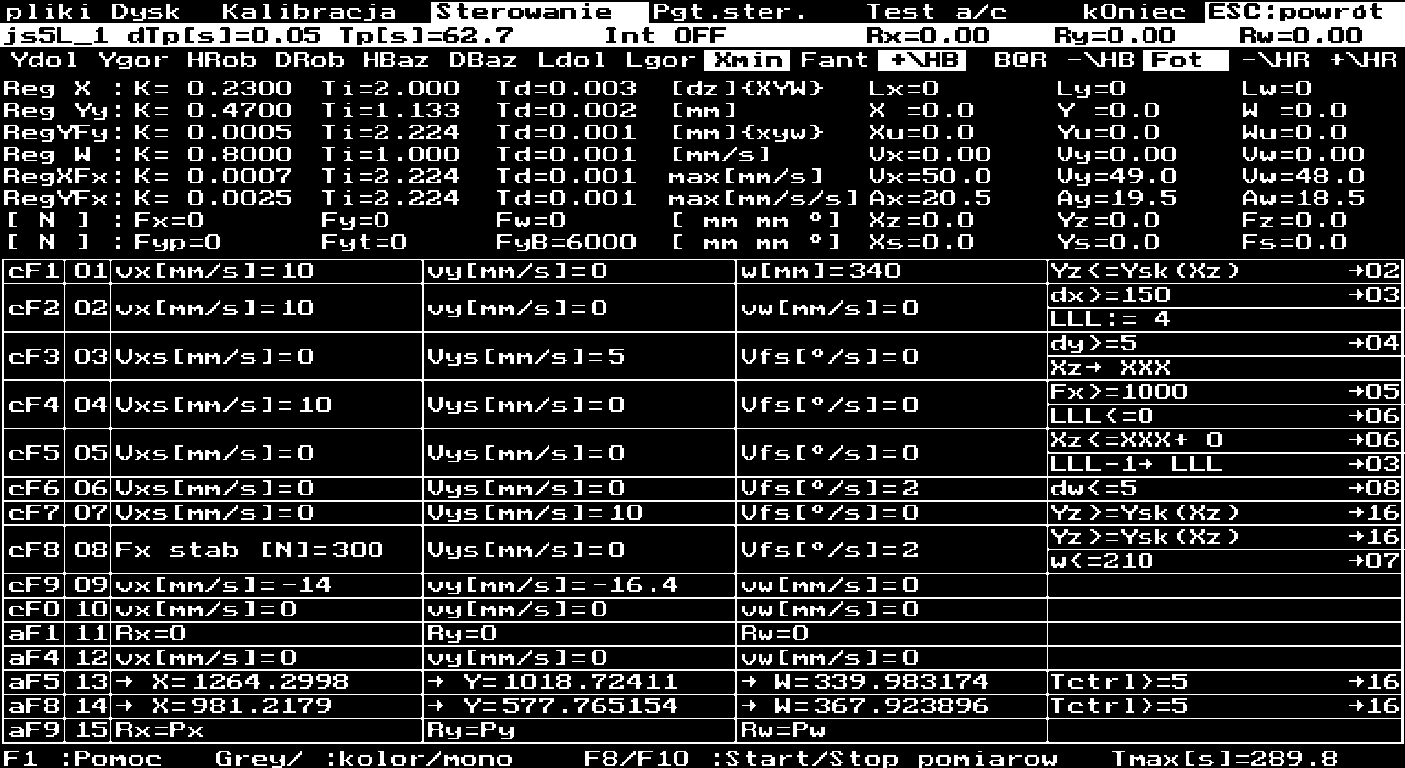
z´bach ∏y˝ki oraz si∏ownika wysi´gnika a˝ do spadku Kolejny przyk∏ad (rys. 4) dotyczy ruchu po za-tej si∏y do drugiej nastawionej wartoÊci. Drugi –
planowanej trajektorii dla stanowiska z osprz´tem jednostajny ruch si∏ownika ramienia z zadanà pr´d-typu ∏adowarkowego. Tor narz´dzia zosta∏ zapisany koÊcià, zaÊ si∏ownik wysi´gnika rozpoczyna∏ ruch, poprzez wartoÊci zmiennych konfiguracyjnych dla gdy si∏a na z´bach przekroczy∏a zadanà wartoÊç, punktów wź∏owych (uzyskane przez doprowadzenie a zatrzymywa∏ si´ po spadku tej si∏y poni˝ej drugiej narz´dzia stanowiska przy sterowaniu rćznym do nastawionej wartoÊci.
wybranych punktów). Nast´pnie dla zadanego czasu Drugi przyk∏ad (rys. 3) dotyczy realizacji na sta-przejÊcia pomi´dzy kolejnymi punktami wź∏owymi nowisku z osprz´tem typu ∏adowarkowego ruchów system obliczy∏, z wykorzystaniem zadaƒ kinematyki roboczych symulujàcych urabianie schodkowe przy osprz´tu, pr´dkoÊci na poszczególnych odcinkach sta∏ej sile naporu. Narz´dzie by∏o wprowadzane trajektorii, tworzàc tablic´ przedstawionà na rys. 4a.
w oÊrodek poziomo. Póêniej realizowany by∏ ruch Ten przyk∏ad dzia∏ania systemu odpowiada metodom schodkowy, przy czym kolejny schodek inicjowany programowania robotów przez uczenie przy ste-by∏ po przekroczeniu zadanej wartoÊci si∏y poziomej, rowaniu punktowym, ale z mo˝liwoÊcià doboru czasu zaÊ liczba schodków wynika∏a z ustawienia licznika ruchu w sposób umo˝liwiajàcy uwzgl´dnienie ogra-
(oznaczenie LLL). Nast´pnie wykonywany by∏ ruch niczeƒ, przyk∏adowo mocy uk∏adu zasilajàcego.
ze sta∏à si∏à naporu z jednoczesnym obrotem ∏y˝ki.
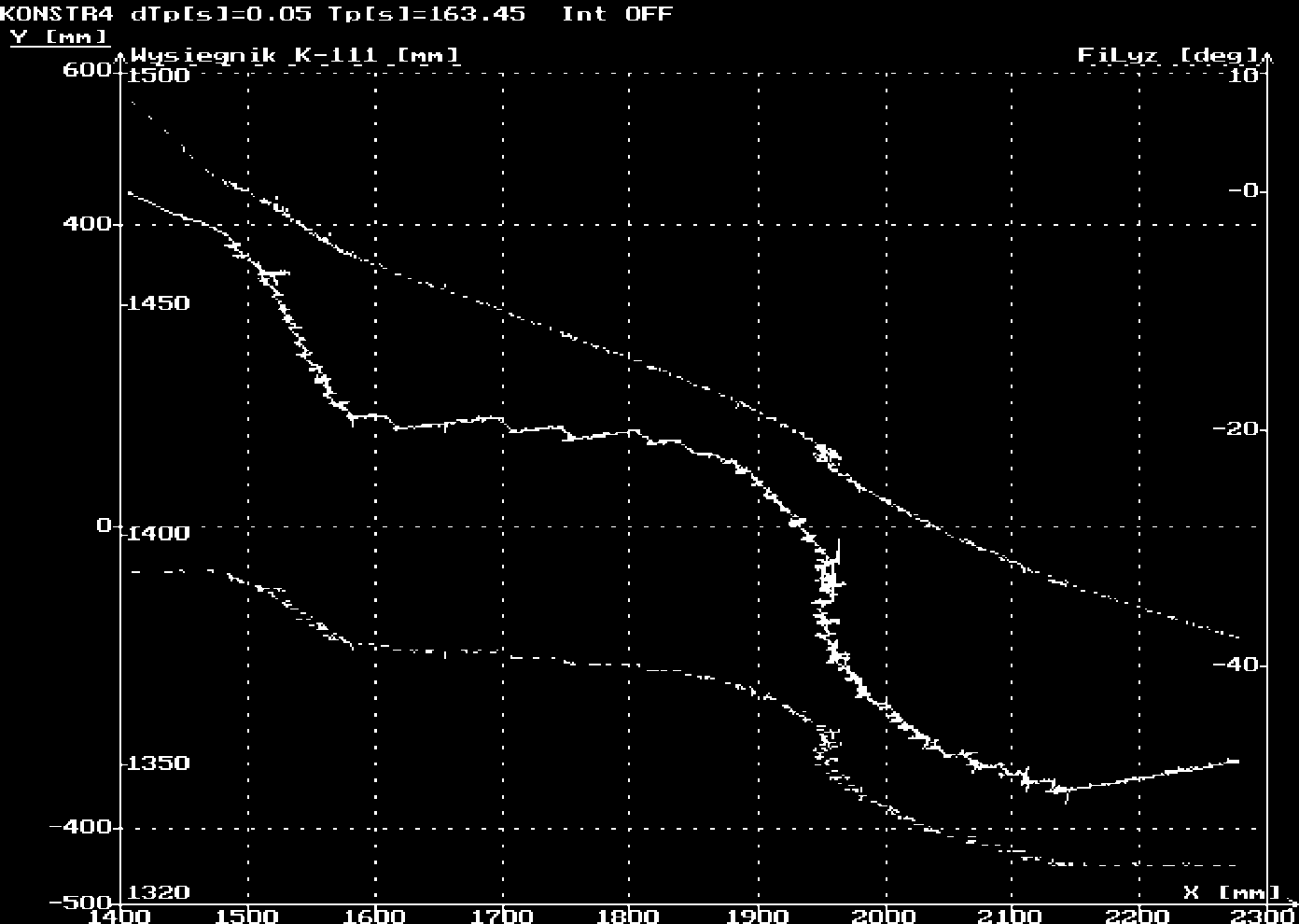
Ostatni z przedstawionych przyk∏adów (rys. 5) Organizacjśchodków zawierajà wiersze 3 – 5 tab-dotyczy procedury omijania przeszkody przez osprz´t licy przedstawionej na rys. 3a, zaÊ parametry ruchu koparki K-111. Informacjà o kontakcie ∏y˝ki z prze-przy sta∏ej sile naporu – wiersz 8. Widoczny na rys. 3b szkodà jest wzrost si∏y na z´bach ∏y˝ki ponad za∏o˝onà tor narz´dzia zosta∏ zatem (poza fazà wejÊcia w oÊro-wartoÊç. JeÊli zatem podczas np. ruchu ramienia dek) utworzony automatycznie przez system po za-przyrost si∏y przekroczy ustalonà wartoÊç, wówczas programowaniu zasad ruchu.
si∏ownik ramienia wycofuje sió nastawionà war-a)
b)
Rys. 4. Realizacja ruchu narz´dzia stanowiska z osprz´tem typu ∏adowarkowego po zadanej trajektorii: a) tablica z programem, b) tor narz´dzia i zarys skarpy
1 4
ROK WYD. LXV O ZESZYT 1/2006
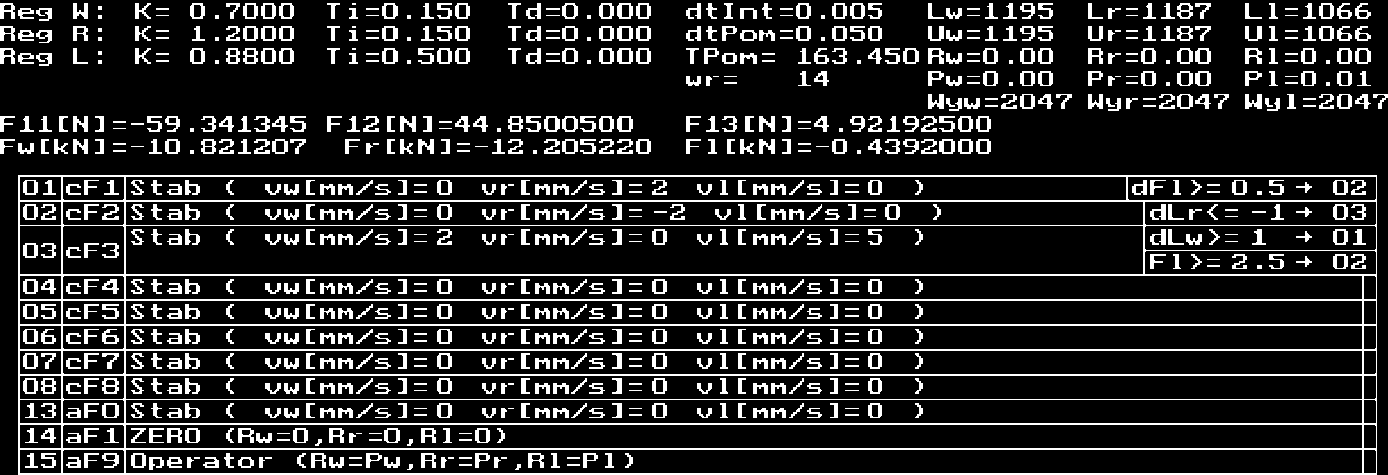
a)
b)
Rys. 5. Omijanie przeszkody przez osprz´t koparki K-111: a) tablica z programem, b) profil przeszkody (oznaczenie Y) oraz zmiany d∏ugoÊci si∏ownika wysi´gnika i kàta ∏y˝ki (oznaczenie FiLyz).
toÊç, a nast´pnie realizowany jest okreÊlony wysuw Zaletà opracowanej metody jest równie˝ mo˝liwoÊç si∏owników wysi´gnika i ∏y˝ki. W dalszej kolejnoÊci tworzenia procedur ∏àczàcych ruchy programowane wykonywany jest kolejny ruch s∏ownika ramienia i generowane automatycznie, zgodnie z przyj´tymi i w wyniku realizacji sekwencji takich ruchów nast´-
za∏o˝eniami. Pokazane przyk∏ady nie ilustrujà w pe∏ni puje ominićie przeszkody. Na rys. 5a przedstawiono mo˝liwoÊci metody, co wynika z ograniczonej obj´-
tablicźawierajàcà organizacjóraz dane procedury, toÊci artyku∏u. Opracowana metoda programowania, zaÊ na rys. 5b zarys przeszkody (oznaczenie Y) ze wzgl´du na mo˝liwoÊci techniczne, testowana by∏a i przebiegi zmian d∏ugoÊci si∏ownika wysi´gnika dotychczas jedynie w warunkach laboratoryjnych.
oraz kàta obrotu ∏y˝ki (oznaczenie FiLyz). Procedura o podobnej organizacji by∏a równie˝ wykorzystywa-LITERATURA
na do realizacji automatycznego ruchu wzd∏u˝ linii 1. P∏onecki L., Cendrowicz J.: Koncepcja wspomagania ope-poÊlizgu.
ratora podczas sterowania ruchami roboczymi koparki hydraulicznej. X Konferencja „Problemy Rozwoju Maszyn Roboczych”, Zakopane 1997.
Podsumowanie
2. P∏onecki L.: Cyfrowe sterowanie osprz´tem maszyn do robót ziemnych na przyk∏adzie jednonaczyniowej koparki hydrau-Budowa mechatronicznego systemu sterowania licznej. Wydawnictwo Politechniki Âwi´tokrzyskiej, Mono-ruchami roboczymi osprz´tu dzia∏ajàcego jako system grafie, Studia, Rozprawy, Kielce 1999.
wspomagania operatora wymaga opracowania spe-3. Craig J. J.: Wprowadzenie do robotyki. Mechanika i Stero-cyficznych metod programowania ruchów osprz´tu.
wanie. WNT, Warszawa 1993.
4. Morecki A., Knapczyk J. i in.: Podstawy robotyki. Teoria Opisana w tej pracy metoda programowania zosta∏a i elementy manipulatorów. WNT, Warszawa 1999.
opracowana tak, aby spe∏nia∏a za∏o˝enia tego rodzaju 5. Cendrowicz J., Gierulski W., P∏onecki L., Tràmpczyƒski W.: metod, wymienione w rozdziale „Zasady programo-Stanowisko do badaƒ procesów urabiania gruntu ∏y˝kà wania”. Opracowana metoda programowania po-koparki. III Konferencja „Metody DoÊwiadczalne w Budowie twierdzi∏a w wyniku przeprowadzonych testów swà i Eksploatacji Maszyn”, Szklarska Por´ba 1997.
poprawnoÊç i przydatnoÊç. Organizacja tablicy s∏u-6. Tràmpczyƒski W., P∏onecki L., Gierulski W., Cendrowicz J., Soko∏owski K.: Komputerowy system sterowania realizujàcy
˝àcej do wprowadzania programu jest przejrzysta, co energetycznie korzystne trajektorie urabiania rzeczywistym umo˝liwia ∏atwe pos∏ugiwanie sińià, a przez to osprz´tem typu ∏adowarka i koparka. Zeszyty Naukowe realizacj´ programów o z∏o˝onym sposobie dzia∏ania.
Politechniki Opolskiej, Mechanika z. 64, Opole 2001.
ROK WYD. LXV O ZESZYT 1/2006
1 5
Wyszukiwarka
Podobne podstrony:
Programowanie ruchów roboczych maszyn robót ziemnych J Cendrowicz
Programowanie ruchów roboczych maszyn robót ziemnych J Cendrowicz
14 01 Maszyny do robot ziemnychid 15606
MASZYNY DO ROBÓT ZIEMNYCH I BUDOWLANYCH, BHP, PODSTAWOWE PRZEPISY BHP
14-01-Maszyny do robot ziemnych
Maszyny do robót ziemnych, Politechnika krakowsla, uczelnia, Nueva carpeta, !5.0!Nawierzchnie Egzami
Budowlane (dkozikowski), Rozp eksploatacja maszyn do robot ziemnych i drogowych, ROZPORZĄDZENIE MINI
14 01 Maszyny do robot ziemnychid 15606
Rozporządzenie w sprawie bezpieczeństwa i higieny pracy podczas eksploatacji maszyn i innych urządze
69 w sprawie bezpieczeństwa i higieny pracy podczas eksploatacji maszyn i innych urządzeń techniczny
bezpieczeństwa i higieny pracy podczas eksploatacji maszyn i innych urządzeń technicznych do robót z
Projektowanie robót ziemnych i transp
Wykonywanie robót ziemnych przy użyciu koparek
04i Wykonywanie robót ziemnych
więcej podobnych podstron