1 Pojęcie sygnału
Sygnałem nazywamy dowolną wielkość fizyczną występującą w procesie sterowania będącą funkcją czasu i wykorzystywaną do przekazywania informacji.
2 Podział sygnałów:
- analogowe (przebieg ciągły)
- dyskretne (wartości które można określić w konkretnych chwilach)
- próbkowane (dyskretyzacja przebiegu sygnału w czasie (pozioma))
- kwantowe (dyskretyzacja przebiegu sygnału w obszarze zmienności (pionowa))
- cyfrowe (dwa powyższe jednocześnie)
3 Elementy automatyki:
Element automatyki to dowolny podzespół, zespół przyrząd lub urządzenie występujące w układach automatyki w którym można wyróżnić sygnał wejściowy i wyjściowy.
4. Cechy charakterystyczne elementów automatyki:
- charakterystyka statyczna
- charakterystyka dynamiczna
- charakterystyka częstotliwościowa
5. Układ automatyki:
To zespół elementów biorących bezpośredni udział w sterowaniu automatycznym danego procesu (lub danej zmiennej procesu) oraz elementów pomocniczych, uporządkowany na zasadzie ich wzajemnej współpracy, tzn. zgodnie z kierunkiem przekazywania sygnałów.
Rodzaje układów automatyki:
- sterowane w układzie otwartym
- sterowane w układzie zamkniętym
Układ otwarty (działanie polega na wpływaniu na wielkość sterowaną y według programu określonego przez sygnał wymuszenia w):
Układ zamknięty (tor główny z obiektem regulacji, tor sprzężenia zwrotnego-elementy mierzące wielkość sterowaną, porównujące itd.)
6. Klasyfikacja układów automatyki:
a) ze względu na zadanie układu
- stabilizujące
- programowe
- nadążne
- ekstremalne
- adaptacyjne
- sterowania optymalnego
- sterowania sekwencyjnego
b) ze względu na liniowość:
- liniowe
- nieliniowe
c) ze względu na sposób działania
- o działaniu ciągłym
- o działaniu nieciągłym (dyskretnym)
d) ze względu na przedstawienie wyników pomiaru sygnału
- analogowe
- cyfrowe
7. Równanie ruchu elementów automatyki:
Określa zależność między wyjściem, a wejściem:
![]()
Równanie różniczkowe liniowe o stałych współczynnikach:
x - we y - wy
8. Transmitancja operatorowa:
Stanowi kompletny opis własności elementu lub rozkładu liniowego.
Jest to stosunek transformaty wielkości wyjściowej y(s) do transformaty wielkości wejściowej x(s) przy zerowych warunkach początkowych
![]()
Po transformacie równania ruchu:

9. Własności statyczne:
- w odniesieniu do elementów mechanicznych
- tarcie lepkie
- sztywność elementu
- dla elementów płynowych
- natężenie przepływu płynu jest proporcjonalne do różnicy ciśnień (q=u Δp)
- moduł sprężystości płynu (odwrotnie)
- w odniesieniu do elementów elektrycznych
- rezystancja, indukcyjność i pojemność są stałe
![]()
![]()
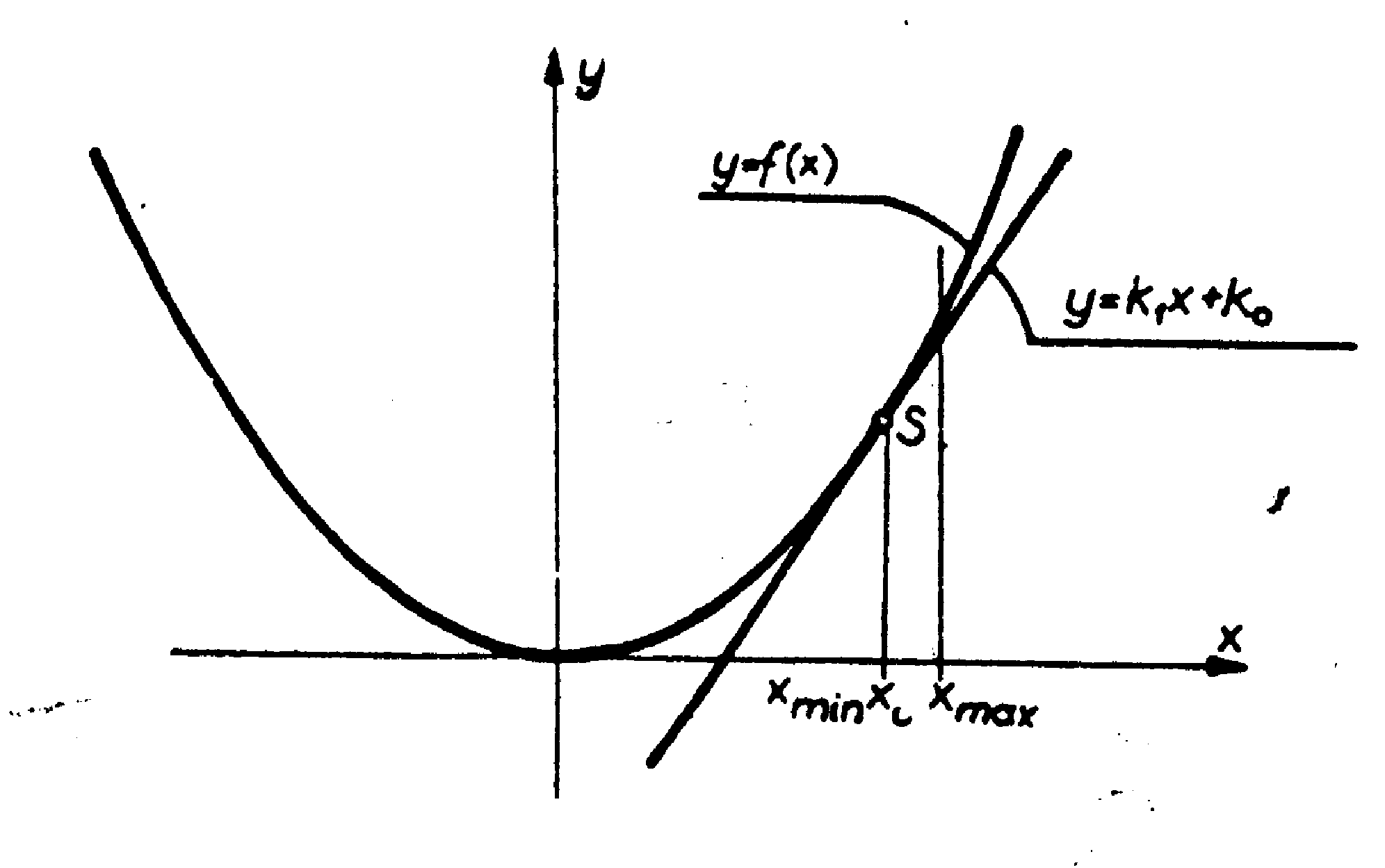
Charakterystyka nieliniowa gładka:
Rozwinięcie w szereg Taylora przybliża charakterystykę nieliniową do liniowej. Łatwiej jest także przeprowadzić styczną do krzywej w miejscu pracy.
k0 = f(x0) - k1x0
10. Właściwości dynamiczne (rónanie różniczkowe; G(s); y(t) na wyrażenie skokowe)
Odpowiedź elementu na sygnał wejściowy - zależność sygnałów:
![]()
11. Elementy liniowe ze względu na właściwości dynamiczne:
- człon proporcjonalny - inaczej bezinercyjne (równanie charakterystyki statycznej: y = kx k - wsp. proporcji ; ![]()
zatem transmitancja: ![]()
)
- inercyjne ( ![]()
![]()
)
- człon całkujący (![]()
; 
; ![]()
)
- człon różniczkujący ( ![]()
; G(s) = ks )
- człon oscylacyjny ( ![]()
; ![]()
)
- człon opóźniający ( y(t) = x(t-τ) G(s) = e-τs )
12. Charakterystyki częstotliwościowe
RYS
Określają zachowanie elementu lub układu przy wszystkich częstotliwościach wymuszenia, podając stosunek amplitud odpowiedzi do wymuszenia oraz przesunięcie fazowe między odpowiedzią, a wymuszeniem jako funkcje częstotliwości.
13. Podstawę teoretyczną charakterystyk częstotliwości stanowi,
transmitancja widmowa:
![]()
![]()
Dla funkcji kanonicznych:
![]()
gdzie: moduł charakterystyki częstotliwości: ![]()
![]()
^Re ^Im
14. Rodzaje częstotliwości:
- amplitudowa ![]()
- fazowa ![]()
- logarytmiczna o charakterze amplitudowy ![]()
- logarytmiczna o charakterze fazowym ![]()
we współrzędnych logarytmicznych jest ![]()
15. Właściwości podstawowych członów automatyki.
Patrz pkt. 11
16. Przykłady podstawowych członów automatyki.
Patrz pkt. 11
17. Opis matematyczny liniowych i nieliniowych układów automatyki.
UKŁADY LINIOWE:
- równanie (np.ruchu) elementów automatyki
- transmitancja operatorowa
- właściwości statyczne - charakterystyka statyczna
- właściwości dynamiczne - charakterystyka dynamiczna
- wyznaczanie odpowiedzi na typowe wymuszenia
- charakterystyki częstotliwościowe
UKŁADY NIELINIOWE:
- opisywane równaniami nieliniowymi różniczkowymi, różnicowymi lub algebraicznymi
- fragmenty charakterystyk można:
- linearyzować
- zastosować aproksymację odcinkowo-liniową
- zastosować metodę płaszczyzny fazowej (dla układu I i II rzędu)
- zastosować metodę funkcji opisującej
18. Obiekt regulacji.
Proces, element lub wielkość fizyczna podlegająca regulacji, za którą oddziałują wielkości zakłócające oraz wielkości nastawiające.
RYS
19. Rodzaje obiektów regulacji.
a) statyczne (inercyjne, bez działania całkującego)
b) astatyczne (całkujące)
Ad a)
Wykres +opis
Ad b)
Wykres+opis
20. Regulatory rodzaje:
- proporcjonalne P
- całkujące I
- proporcjonalno-całkujące PI
- proporcjonalno-różniczkujące PD
- proporcjonalno-całkująco-różniczkujące PID
21. Regulatory.
To urządzenia, w których sygnały powstają jako wynik realizacji co najmniej dwóch funkcji przetwarzania (oddziaływanie na odchyłkę regulacji (e), a druga - współczynnik wzmocnienia)
RYS
22. Charakterystyka regulatorów.
- stabilność (układ po wymuszeniu wraca do stanu równowagi)
- błąd statyczny eust (max. Różnica między wartością zamienianą, a zadaną lub też założoną sygnału wejściowego lub wyjściowego w stanie ustalonym)
Wyszukiwarka
Podobne podstrony:
Pojęcia w formie ściągi, Ekonomia, ekonomia
Pojęcia w formacie ściągi, Biotechnologia, Fizyka, Labolatorium
Sciągi do egzaminu, sciaga pojecia
Ściągi na prawo rzymskie, RAMKI5, POJĘCIE SPADKU Normy prawa spadkowego sprzyjały gromadzeniu i utr
Ściągi na prawo rzymskie, RAMKI5, POJĘCIE SPADKU Normy prawa spadkowego sprzyjały gromadzeniu i utr
Ściągi z fizyki-2003 r, Dynamika-pojęcia
PRZYKŁADY zadań JB-mp, Studia, Semestr 1, Sygnały i Systemy, ściągi
podstawowe pojęcia statystyka, ŚCIĄGI Z RÓŻNYCH DZIEDZIN, Statystyka
Jak młodzi Polacy pojmują i realizują pojęcie patriotyzmu, Szkoła- pomoce naukowe ;P, Ściągi;), Pols
więcej podobnych podstron