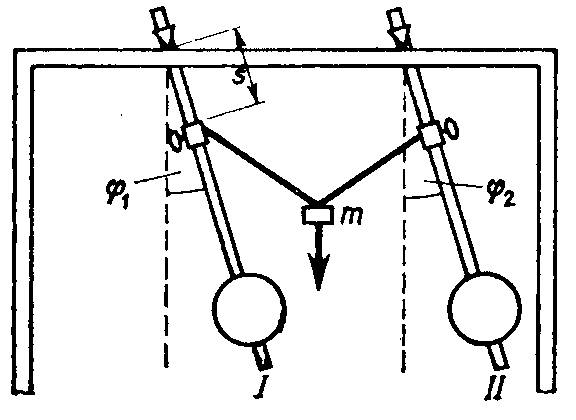
tyw na którym zawieszone są obydwa wahadła lub bezpośrednio przez sprężynę albo poprzez obciążoną w środku nić. Pierwszy rodzaj sprzężenia dla wahadeł zawieszonych na sztywnych statywach jest bardzo słaby, stąd w doświadczeniu stosuje sprzężenie bezpośrednie. Moment kierujący każdego z wahadeł, zgodnie z wzorem wynosi
D = mgl
gdzie m oznacza masę wahadła, l- odległość środka ciężkości od osi obrotu. Ponadto w przypadku wahadeł sprzężonych występuje moment sprzęgający Ds. Wartość tego momentu zależy od odległości s punktu zaczepienia siły sprzęgającej, od osi obrotu oraz od różnicy faz obydwu wahadeł
Ds = Ds(s, ϕ1-ϕ2)
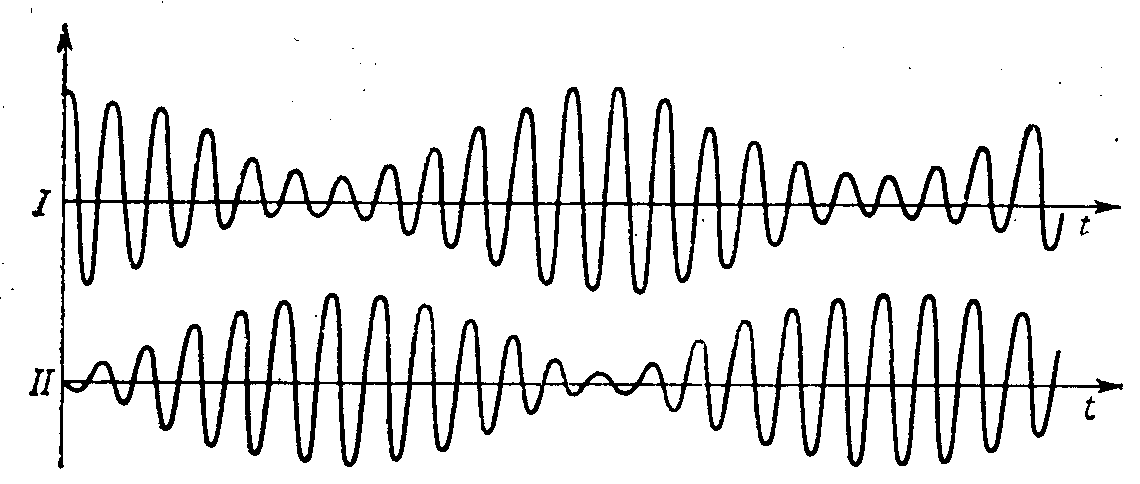
W przypadku wahadeł sprzężonych, których okresy drgań własnych są bardzo zbliżone, występują tzw. dudnienia o następującym przebiegu. Załóżmy, że w chwili początkowej wahadło II jest nieruchome, natomiast wahadło I wykonuje drgania.
Wtedy wahadło II (nieruchome) zacznie drgać i jego amplituda stale rośnie, natomiast amplituda drgań wahadła I maleje. Amplituda drgań wahadła II rośnie do chwili, gdy amplituda wahadła I zmaleje do zera. Następnie drgania przekazywane są znowu do wahadła I.
Czas, po którym amplituda drgań jednego z wahadeł wraca do początkowej wartości, nazywamy okresem dudnień Td, a odpowiadającą mu częstość wd - częstością dudnień. Przekazywania drgań nie obserwuje się, jeżeli wahadła wykonują tzw. drgania normalne. W przypadku pierwszego drgania normalnego obydwa wahadła drgają w zgodnej fazie (Ifil.= lfi2) i nie działa moment sprzęgający, bowiem Ifi 1 -Ifi2 = o; drganie to zachodzi z częstością kołową w 1 zwaną .pierwszą częstością normalną i odpowiadającym jej okresem T 1. Dla drugiego drgania normalnego lfil = = -Ifi2 wprowadza się drugą częstość normalną w2 i okres T2. \
Równanie ruchu każdego z wahadeł musi być uzupełnione składnikiem określającym wpływ momentu sprzęgającego, stąd przyjmują one postać:
Uwzględniając podstawienia:
otrzymamy:
Uwzględniając powyższe podstawienia równania ruchu przyjmą postać:
Oznaczając przez C wychylenie dla t = 0, otrzymamy następujące rozwiązania tych równań:
co zgodnie z podstawieniami:
daje następujące wyrażenie na ϕ ϕ :
w wyrażeniach powyższych wielkości:
możemy uważać za powoli zmieniające się w czasie amplitudy. Tak więc równania (10.54) dają ściśle matematyczny opis krzywych z rysunku 10.14. Amplituda po czasie .T4 wrócić musi do pierwotnej wartości, czyli zgodnie z ostatnimi wyrażeniami otrzymamy
Interesujący jest przypadek, gdy częstości drgań składowych niewiele się różnią od siebie. Przyjmijmy dla uproszczenia, że amplitudy dwu drgań składowych są jednakowe i równe a, pulsacje zaś - odpowiednio równe ωl i ω2 przyjmujemy ponadto, że w chwili t = 0 fazy obu drgań są jednakowe i równe zeru. Mamy wówczas:
Jeśli
możemy z wystarczającym przybliżeniem uważać ruch wypadkowy za drganie harmoniczne proste o pulsacji (ωl + ω2)/2 i amplitudzie zależnej od czasu, a mianowicie drgającej harmonicznie z pulsacją ∆ω/2 i z amplitudą 2a. Amplituda wypadkowego drgania zmienia się zatem od zera do maksymalnej wartości 2a. Tego typu zmianę amplitudy nazywamy dudnieniem; okres dudnienia jest to czas od osiągnięcia przezeń maksymalnej amplitudy do osiągnięcia następnego maximum amplitudy. Odpowiada to zmianie argumentu wyrażenia cos[(ωl - ω2)t/2] od wartości nπ do wartości (n+l)π, gdzie n jest liczbą całkowitą. Zmiana ta zachodzi w czasie Td; mamy zatem
skąd
Dudnienia odgrywają dużą rolę w akustyce. Również i w przypadku, gdy amplitudy dwu drgań składowych są niejednakowe, drganie wypadkowe ma charakter dudnienia. Na rys. widzimy przykład dudnienia.
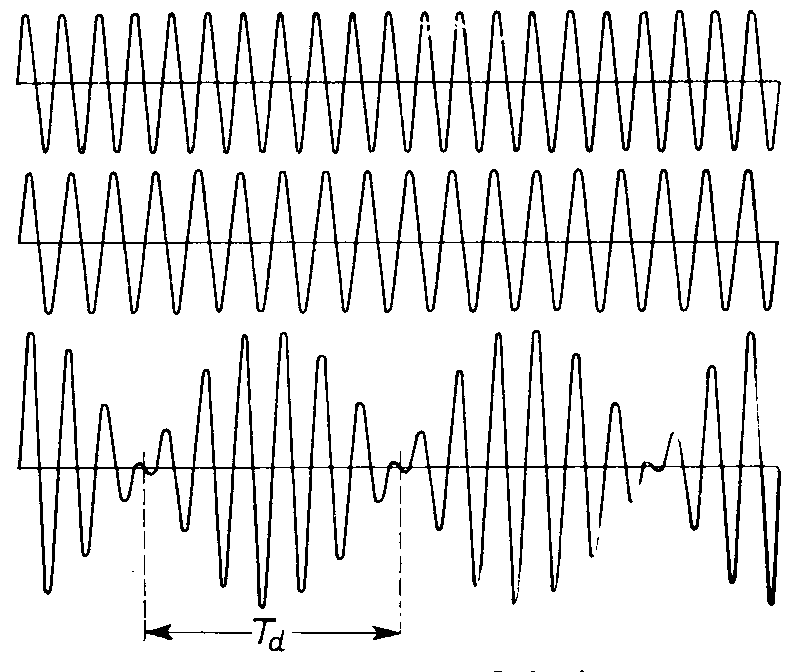
Rys. Dudnienia
Doświadczalnie można zademonstrować nakładanie się na siebie dwu drgań harmonicznych w jednym kierunku za pomocą urządzenia pokazanego schematycznie na rys. VIII.ll. Widzimy tu dwie poziome taśmowe sprężyny, mogące, wykonywać drgania w kierunku pionowymi drgania te możemy z wystarczającym przybliżeniem uważać za harmoniczne. Pulsację drgań możemy zmieniać zmieniając długość taśm. Do każdej z taśm przymocowane jest zwierciadełko, biorące oczywiście udział w drganiach. Na zwierciadełka rzucamy smukłą wiązkę światła, która po odbiciu od nich pada na ekran. Na drodze dwukrotnie odbitego promienia ustawiamy zwierciadło szybko wirujące, dzięki czemu drgania plamki świetlnej na ekranie rozciągnięte zostają w krzywą charakteryzującą przebieg drgania wypadkowego 'v czasie.
Oczywiście możemy składać ze sobą nie tylko dwa, lecz i dowolną liczbę drgań harmonicznych o różnych częstotliwościach. Jeśli stosunki tych częstotliwości są liczbami wymiernymi, wypadkowe drganie jest periodyczne. Odwrotnie, dowolne drganie harmoniczne periodyczne rozłożyć można na drgania harmoniczne proste. Jak pokazał Fourier, każde drganie periodyczne:
x = f(t) ,
o okresie T, to znaczy takie, że
f(t+T) = f(t) ,
rozwinąć można na nieskończony zbieżny szereg drgań harmonicznych prostych, tak że:
f(t) = A0+A1cosωt+A2cos2ωt+ ... +Blsinωt+B2sin2ωt+ , ... ,
przy czym
współczynniki zaś An i Bn są jednoznacznie określone. Oczywiście funkcja f(t) spełniać musi pewne, zresztą bardzo ogólne, warunki. Prócz pulsacji podstawowej ω w szeregu (45.12) występują całkowite wielokrotności tej pulsacji, tzw. pulsacje harmoniczne lub alikwoty. Alikwoty odgrywają dużą rolę w akustyce, o czym będzie mowa później. Niektóre ze współczynników An i Bn mogą być oczywiście równe zeru. Dla przykładu na rys. VIII.12 pokazana jest analiza fourierowska drgania trójkątnego. Mamy mianowicie dla tego drgania:
Na rys. VIII.12b uwzględniono wypisane cztery wyrazy szeregu Fouriera (45.14); drganie wynikające z nałożenia na siebie tych czterech drgań harmonicznych prostych widzimy na rys. VIII.12c.
Odmienne wyniki uzyskamy, jeśli drgania składowe odbywają się wzdłuż prostopadłych do siebie osi x i y. Drganie harmoniczne proste wprowadziliśmy w § 43 jako ruch rzutu punktu obiegającego koło ze stałą szybkością kątową ω na oś poziomą czy pionową (rys. VIII.1). W ten sposób wprowadziliśmy dwa drgania harmoniczne proste, określone równaniami:
x = acosωt
oraz
y = asinωt
Podnosząc oba równania do kwadratu i dodając do siebie otrzymamy
x2+y2 = a2,
a więc istotnie równanie koła o promieniu a; x oraz y możemy interpretować jako współrzędne punktu na tym kole. Możliwa jest jednak i inna interpretacja: możemy uważać, że rozpatrywany przez nas punkt materialny wykonuje równocześnie dwa drgania o tej samej pulsacji ω wzdłuż prostopadłych do siebie osi - przy czym pomiędzy drganiami tymi występuje różnica fazy o kąt π/2, gdyż :
y = asinωt = acos(ωt - π/2) .
Drganie wzdłuż osi y opóźnione jest w fazie o π/2 względem drgania wzdłuż osi x. Ponieważ kąt fazowy 2π odpowiada pełnemu okresowi drgań, oznacza to, że drganie wzdłuż osi y opóźnione jest o ćwierć okresu względem drgania wzdłuż osi x.
W każdej chwili położenie punktu materialnego wykonującego drgania składowe określić można dodając do siebie wektory reprezentujące na osiach x i y odpowiednie wychylenia. Z rys. VIII.13 łatwo się przekonać, że wypadkowy ruch jest istotnie obiegiem po kole ze stałą szybkością kątową ω w kierunku przeciwnym ruchowi wskazówek zegara. Zobaczymy jeszcze, jak ruch wypadkowy zależy od różnicy faz drgań składowych. W tym celu przyjmijmy najpierw, że oba drgania składowe nie różnią się w fazie. Mamy wówczas
x = acosωt,
y= acosωt.
Z równań tych wynika, że
x = y.
Jest to równanie prostej, pochylonej pod kątem 45° względem osi x (rys. VIII.14). Drganie wypadkowe odbywa się wzdłuż tej prostej, a wychylenie maksymalne równe jest
.
Jeśli różnica faz drgań składowych wynosi -π, to mamy
x = acosωt,
y= acos(ωt-π) = -acosωt,
skąd wynika, że
x= -y.
W tym przypadku drganie wypadkowe odbywa się wzdłuż prostej pochylonej pod kątem -45° względem osi x (rys. VIII.15).
Gdy wreszcie zapóźnienie w fazie drgania pionowego wynosi -3π /2 mamy
x = acosωt,
y = acos(ωt-3/2 π) = acos (ωt+π/2) = - asinωt.
W tym przypadku mamy znów
x2+y2 = a2,
a więc ruch odbywa się po kole. Łatwo się jednak przekonać, że o ile w przypadku zapóźnienia o π/2 ruch odbywał się w zwrocie przeciwnym zwrotowi ruchu wskazówek zegara, teraz odbywa się on zgodnie z obiegiem wskazówek (rys. VIII.16). Analogiczną sytuację znaleźlibyśmy, gdyby drganie w kierunku osi y odpowiednio wyprzedzało w fazie drganie w kierunku osi x.
Jeśli będziemy pamiętać, że zmiana fazy o kąt 2π nie wpływa na sytuację, łatwo stwierdzić, że opóźnienie w fazie o π/2 drgania w kierunku osi y względem drgania w kierunku osi x oznacza dokładnie to samo, co wyprzedzenie w fazie drgania wzdłuż osi x przez drganie wzdłuż osi y o 3π /2, analogicznie przedstawia się sprawa dla innych opóźnień czy wyprzedzeń w fazie.
Jeśli zapóźnienie w fazie drgania w kierunku osi y względem drgań w kierunku osi x ma dowolną wartość ϕ, mamy wówczas
x = acosωt,
y = acos(ωt-ϕ) = a(cosωtcosϕ+sinωtsinϕ).
Z wzorów tych znajdujemy
y-xcosϕ = asinωtsinϕ,
podnosząc zaś wzory (45.30) oraz wzór (45.28) pomnożony przez sinϕ do kwadratu i dodając do siebie otrzymamy
(y-xcosϕ)2+x2sin2ϕ= a2sin2ϕ
Jest to równanie krzywej stożkowej, która musi być elipsą, gdyż, jak widać z równań (45.28) i (45.29), wpisana jest ona w kwadrat o boku 2a (rys. VIII.17). Elipsa ta przechodzi w koło dla ϕ= π/2 lub 3π/2, a w prostą dla ϕ = 0 lub ϕ= π. Dla kątów 0 ≤ ϕ ≤ π elipsa obiegana jest przez punkt drgający w kierunku przeciwnym ruchowi wskazówek zegara, dla kątów ϕ zaś większych od π - zgodnie z ruchem wskazówek zegara. Wielkie osie tych wszystkich elips pochylone są pod kątem π/ 4 bądź - π/4 do osi x.
Jeślii amplitudy drgań w kierunkach osi x i y są niejednakowe, równe odpowiednio a i b, mamy wówczas:
x = acosωt,
y = bcos(ωt-ϕ).
Postępując jak w przypadku poprzednim znajdujemy
a więc znów równanie elipsy, wpisanej tym razem w prostokąt o bokach 2a wzdh1ż osi x i 2b wzdh1ż osi y. (rys. VIII.18)j
Na rys. VIII.19a widzimy wyniki składania drgań (45.28) i (45.29), na rys. VIII.19b zaś składanie drgań (45.33) i (45.34) dla różnych wartości różnicy faz <p.
Dwa drgania harmoniczne o jednakowych amplitudach w kierunkach do siebie prostopadłych z różnicą faz 7t/2 lub -7t/2 składają się, jak wiemy, na drgania kołowe, przebiegane dla <p = - 7t/2 przeciwnie niż ruch wskazówek ~ zegara, a dla <p = 7t/2 zgodnie z ruchem wskazówek zegara. W pierwszym przypadku mamy
x = acos wt ,
y = acos ( wt- ~) ,
w drugim zaś
x = acos wt ,
y = acos ( wt+ ~) .
Zobaczymy teraz, jaki wynik da nałożenie na siebie dwu tych drgań kołowych. Znajdziemy
x = 2acos wt ,
Y=O.
Jak widzimy, w wyniku nałożenia na siebie dwu przeciwsobnych drgań kołowych otrzymamy drganie harmoniczne proste o tej samej pulsacji, lecz zdwojonej amplitudzie.
Jeśli częstotliwości nakładanych na siebie dwu drgań harmonicznych w kierunkach wzajemnie do siebie prostopadłych nie są sobie równe, ale stosunek ich jest liczbą wymierną, w wyniku nakładania na siebie tych drgań uzyskujemy
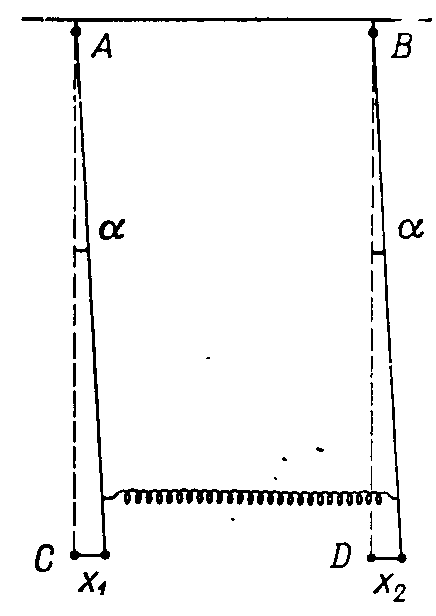
Rozpatrzmy jeszcze przypadek, gdy mamy do czynienia z dwoma punktami materialnymi, wykonującymi drgania harmoniczne i oddziałującymi wzajemnie na siebie, Weźmy pod uwagę jako najprostszy przypadek tego rodzaju dwa jednakowej długości i o jednakowej masie wahadła, połączone ze sobą lekką sprężyną.
Oznaczmy wychylenie pierwszego z nich z położenia równowagi przez x1, drugiego przez x2. Równania ruchu wahadeł mają postać (zakładamy, że wychylenia są na tyle małe, że możemy uważać łuki zakreślone przez wychylające się kulki za odcinki prostej):
d2.'1!1 mg
mdi2 = - T .'1!1 + k(.'1!2- .'1!1) ,
d2.'1!2 mg
[mdt2 = - T .'1!2+ k(.'1!1-.'1!2) ;
przyjmujemy, że napięcie sprężyny proporcjonalne jest do jej rozciągnięcia. Jak wynika z powyższych równań, drgania wahadeł połączonych sprężyną przebiegają inaczej niż drgania wahadeł swobodnych; są one wzajemnie uzależnione, a ich okresy ulegają zmianie. Można wykazać, że każde z wahadeł wykonuje drgania złożone z dwu drgań harmonicznych prostych o różnych częstotliwościach, przy czym w tych drganiach złożonych występują dudnienia. Istnieją jednak pewne przypadki, w których oba wahadła wykonują łącznie ruch drgający prosty. Pierwszy przypadek otrzymamy, gdy w chwili początkowej oba wahadła jednakowo wychylimy i puścimy swobodnie. Mamy wtedy w chwili t = 0
.'1!1(0) = .'1!2(0) ,
co oznacza, że w chwili początkowej wahadła podlegają tylko działaniu siły ciężkości; będą więc one drgać z jednakowymi częstotliwościami i warunek będzie stale spełniony. Wahadła będą zatem wykonywać drgania stale zgodne w fazie z częstotliwością taką samą, jak gdyby były swobodne. Mamy tu przykład drgania normalnego.
Drugie drganie normalne otrzymamy, gdy w chwili początkowej wahadła wychylimy o jednakowe kąty w kierunkach przeciwnych i puścimy swobodnie. W chwili t = 0 mamy zatem
.'1!1(0) = -.'1!~(0) .
Wahadła wykonują wahania ruchem przeciwsobnym i ruch ich będzie stale przeciwsobny. Możemy zatem położyć
.'1!1 = - .'1!2 .
oraz
Równania (45.39) i (45.40) przybierają postać:
d2.'1!1 mg mdt2= -T.'1!1-2k.'1!1' d2.'1!2 mg mdt2 = -T.'1!2-2k.'1!2 .
Postać obu równań jest identyczna, a mianowicie: d2.'1! (g 2k) dt2=-l+m.'1!.
Równanie powyższe opisuje drgania harmoniczne proste o pulsacji w:
x = Acoswt ,
przy czym mamy
w2 = !1 + ~
l m'
skąd
Jak widzimy, częstotliwość takich wahań przeciwsobnych, składających się na drgania normalne układu dwu wahadeł, jest wyższa niż częstotliwość wahań wahadła swobodnego czy też wahań zgodnych w fazie.
Analogiczną sytuację spotykamy w przypadku ogólnym, gdy mamy do czynienia z układem N punktów materialnych, oddziałujących wzajemnie na siebie siłami sprężystymi. W kursie mechaniki teoretycznej wykazuje się, że istnieje wówczas N drgań harmonicznych normalnych, to jest takich, że wszystkie punkty drgają równocześnie w pewien uzgodniony fazowo sposób.
Drgania normalne odgrywają dużą rolę w różnych działach fizyki, w szczególności, gdy chodzi o drgania sieci krystalicznej (fizyka ciała stałego), drgania wewnątrzcząsteczkowe (fizyka cząsteczek), akustykę, elektroakustykę.
Wyszukiwarka
Podobne podstrony:
C4 rysunek b
rysunek rodziny ppt
so c4
Fizyka j c4 85drowa
Rysunek techniczny 4
Laboratorium jezyk c4 2013
inny projekt, Rysunek piwnic
0656PWsrT Rysunek 02 03
Podnośnik śrubowy rysunek złożeniowy
0656PWsrTz1 Rysunek 09b
lawa fund rysunek
0656PWsrT Rysunek 06 04
0656PWsrT Rysunek 02 01
G2 4pbZUDP Rysunek 02 02
powtórzenie wiadomości, Pomoce do zajęć, Technika, rysunek techniczny, pismo techniczne
więcej podobnych podstron