MASZYNY ELEKTRYCZNE 2 (egzamin)
A. Transformatory.
1. Zasada zdziałania, budowa, napięcia indukowane w uzwojeniach i przekładnia.
2. Stan jałowy, zwarcia i obciążenia, schematy zastępcze, wykresy wskazowe.
3. Eksperymentalne wyznaczenie parametrów schematu zastępczego.
4. Straty mocy w transformatorze, zmiany strat i prądu magnesującego przy zmianach napięcia i wahaniach częstotliwości.
5. Przebieg prądu magnesującego i strumienia magnetycznego w stanie nasyconym, przy jednowartościowej i dwuwartościowej krzywej magnesowania, odpowiednio przy sinusoidalnym napięciu zasilania i sinusoidalnym prądzie zasilania w transformatorze jednofazowym.
6. Transformatory trójfazowe, obwody magnetyczne, układy grupy połączeń.
7. Wpływ układu połączeń transformatora trójfazowego na wyższe harmoniczne prądu magnesującego, strumienia i napięcia.
8. Praca równoległa transformatorów trójfazowych (cel, warunki).
9. Autotransformatory.
10. Stany przejściowe przy włączaniu transformatora w stanie jałowym.
11. Zmienność napięcia.
B. Obwody magnetyczne i elektryczne maszyn elektrycznych.
1. Pol magnetyczne ME - rodzaje, sposoby wytwarzania, rozkładanie, sumowanie, warunki powstawania pola wirującego kołowego, wyższe harmoniczne strefowe i czasowe.
2. Uzwojenia maszyn bezkomutatorowych - rodzaje, podstawowe parametry, gwiazda żłobkowa, sporządzanie schematów.
3. Współczynnik uzwojenia (grupy i skrótu).
4. Napięcie magnetyczne (smm) uzwojenia (rozkład wzdłuż obwodu maszyny).
5. Napięcie indukowane w uzwojeniu maszyny trójfazowej.
6. Prąd magnesujący niezbędny do wywołania przepływu gwarantującego odpowiednie pole magnetyczne.
C. Maszyny indukcyjne (asynchroniczne).
1. Zasada działania, budowa, poślizg, napięcia indukowane w różnych stanach pracy.
2. Równanie przepływów (smm, napięć magnetycznych), sprowadzenie prądów strony wtórnej do strony pierwotnej.
3. Schemat zastępczy, zasady sporządzania, interpretacja parametrów.
4. Wykres wskazowy.
5. Stan jałowy i stan zwarcia.
6. Bilans mocy i sprawność (wykres Sankey`a).
7. Elektromagnetyczny moment obrotowy.
8. Moment i poślizg krytyczny.
9. Wzór Kloss`a, wyznaczenie charakterystyki mechanicznej M=f(s).
10. Charakterystyka mechaniczna M=f(s) i zależność jej przebiegu od parametrów uzwojeń.
11. Momenty pasożytnicze (asynchroniczne i synchroniczne).
12. Silniki dwuklatkowe i głębokożłobkowe.
13. Rozruch silników.
14. Regulacja prędkości obrotowej.
15. Silniki jednofazowe.
16. Praca silnika w warunkach różnych od znamionowych.
17. Stabilność pracy silników indukcyjnych.
18. Wykres kołowy.
D. Maszyny synchroniczne.
1. Zasada działania, budowa.
2. Oddziaływanie (reakcja) wtórnika w różnych stanach obciążenia w maszynie o biegunach jawnych i utajnionych.
3. Reakcja oddziaływania (reakcji) twornika, reaktancja rozproszenia i reaktancja synchroniczna.
4. Schemat zastępczy i wykres wskazowy maszyny cylindrycznej w stanie nienasyconym.
5. Schemat zastępczy i wykres wskazowy maszyny jawnobiegunowej w stanie nienasyconym.
6. Wykres wskazowy maszyny cylindrycznej w stanie nasyconym.
7. Moment obrotowy i charakterystyka kątowa momentu maszyny jawnobiegunwej.
8. Charakterystyki prądnicy.
9. Praca równoległa prądnic, synchronizacja i samosynchronizacja.
10. Regulacja mocy czynnej i biernej maszyny współpracującej z siecią sztywną.
11. Moment synchronizujący, przeciążalność statyczna.
12. Forsowania wzbudzenia i odwzbudzenie.
13. Silniki synchroniczne, rozruch, zalety i wady.
14. Krzywe V (Mordey`a).
15. Zwarcie udarowe.
E. Maszyny prądu stałego.
1. Zasada działania, budowa.
2. SEM i moment obrotowy.
3. Okład prądu, oddziaływanie (reakcja) twornika i jej kompensacja.
4. Komutacja, kompensacja SEM samoindukcji w zwoju komutatorowym, powodu iskrzenia i sposoby poprawy komutacji.
5. Rodzaje uzwojeń tworników, warunki symetrii.
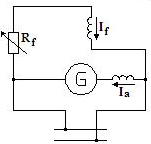
6. Prądnica obcowzbudna, schemat i charakterystyki.
7. Prądnica samowzbudna bocznikowa, schemat, proces samowzbudzenia i charakterystyki.
8. Prądnica szeregowo-bocznikowa, praca równoległa.
9. Silniki: bocznikowy, szeregowy i szeregowo-bocznikowy, schematy, charakterystyki robocze, rozruch i regulacja prędkości obrotowej.
10. Hamowanie maszynami prądu stałego.
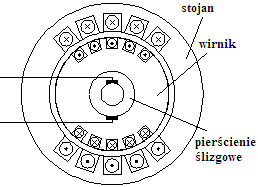
1. Zasada działania, budowa, poślizg, napięcia indukowane w różnych stanach pracy.
Maszyna indukcyjna - maszyna, w której napięcie do obwodu wirnika nie jest doprowadzane z zewnątrz lecz pojawia się w wyniku indukcji.
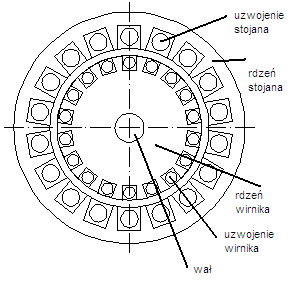
Budowa:
- nieruchomy stojan
- wirujący wirnik
- obwód magnetyczny (rdzeń z żelaza w formie pakietu z blach)
- obwód elektryczny (uzwojenie wykonane z drutu nawojowego lub prętów)
- szczelina między stojanem i wirnikiem jak najcieńsza.
- elementy konstrukcyjne (obudowa, chłodzenie)
Rodzaje budowy:
- pierścieniowe - uzwojenie wirnika wykonane z drutu nawojowego z połączonymi pierścieniami ślizgowymi, które umożliwiają włączenie w obwód wirnika urządzeń rozruchowych i regulayjnych.
- klatkowe - uzwojenie wirnika wykonane z prętów. Wystające z rdzenia pręty łączy się po obu stronach pierścieniami zwierającymi tworząc klatkę. Klatkę można traktować jako uzwojenie trójfazowe o liczbie faz równej liczbie prętów.
Zasada działania:
Zasilenie stojana trójfazowym prądem powoduje powstanie wirującego kołowa pola magnetycznego z prędkością
(f1 - częstotliwość zasilania, p - liczba par biegunów). Wirujące pole przecina uzwojenie nieruchomego wirnika powodując indukowanie się w nim napięcia oraz przepływ prądu. Wskutek oddziaływania pola na przewód z prądem powstanie moment elektromagnetyczny. Jeżeli osiągnie on wartość większa od momentu obciążenia to wirnik zacznie się obracać zwiększając swoją prędkość obrotową. Maszyna pracuje jako silnik przetwarzając energie elektryczną na mechaniczną. Wirnik podąża za obracającym się polem stojana wirując w kierunku zgodnym z kierunkiem wirowania pola dążąc do osiągnięcia prędkości synchronicznej. Osiągnięcie tej prędkości spowodowałoby, że ustałoby przecinanie uzwojenia wirnika przez pole stojana, nie indukowałoby się napięcie i nie popłynąłby prąd uzwojeniu, nie powstałby moment elektromagnetyczny. O wartości napięcia indukowanego w prętach wirnika i o wartości płynącego prądu decyduje prędkość przecinania tych prętów przez linie pola magnetycznego. Im jest ona większa tym większą wartość mają napięcia i prądu. Prędkość ta to poślizg.
Poślizg - względna prędkość wirującego pola względem wirnika odniesiona do prędkości synchronicznej:
.
Ponieważ pole stojana i wirnika wirują z różnymi prędkościami, różnić się będzie również częstotliwość wirowania tych pól:
. W maszynie asynchronicznej występują dwa obwody elektryczne sprzężone ze sobą magnetycznie, pracujące przy różnych częstotliwościach, przy czym w obwodzie wirnika częstotliwość ulega zmianom przy zmianie obciążenia lub zmianie rodzaju pracy.
Napięcia indukowane w różnych stanach pracy:
- napięcie przy nieruchomym wirniku:
- napięcie w uzwojeniu twornika:
- napięcie w wirniku przy dowolnej prędkości:
Stany pracy maszyny asynchronicznej:
- hamulec n<0 s>1
- transformator n=0 s=1
- silnik 0<n<1 1>s>0
- idealny bieg jałowy n=n1 s=0
- prądnica n>n1 s<0
2. Równanie przepływów (smm, napięć magnetycznych), sprowadzenie prądów strony wtórnej do strony pierwotnej.
Amplituda przepływu uzwojenia wirnika:
Amplituda przepływu uzwojenia stojana:
Amplituda przepływu wypadkowego:
Równanie przepływu:
;
Sprowadzenie prądu strony wtórnej na stronę pierwotną:
Gdzie: R2 - rezystancja uzwojenia wirnika; Xρ2 - reaktancja rozproszenia wirnika
gdzie:
- przekładnia prądowa (m - liczba faz)
3. Schemat zastępczy, zasady sporządzania, interpretacja parametrów.
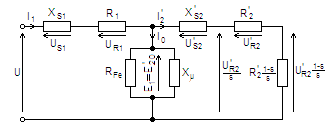
Równania maszyny asynchronicznej:
Schemat zastępczy z obwodem wirnika sprowadzonym na stronę stojana
Schemat zastępczy uwzględnia działanie przede wszystkim działanie strumienia głównego Ф, który indukuje napięcie E1 w uzwojeniu stojana oraz E2 w uzwojeniu wirnika. Strumieniom rozproszenia odpowiadają reaktancje rozproszenia stojana XS1 oraz wirnika XS2. R1 oraz R2 są to rezystancje uzwojeń odpowiednio stojana oraz wirnika. RFe - straty w rdzeniu stojana, Xμ - reaktancja obwodu prądu magnesującego.
Sprowadzenie napięć:
gdzie:
- przekładnia napięciowa
Sprowadzenie prądów:
gdzie:
- przekładnia prądowa (m - liczba faz)
Sprowadzenie rezystancji i reaktancji:
Schemat zastępczy jest schematem obwodu złożonego z rezystancji i reaktancji dobranych tak, aby zjawiska zachodzące w tym układzie odpowiadały w przybliżeniu zjawiskom zachodzącym w maszynie.
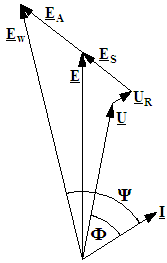
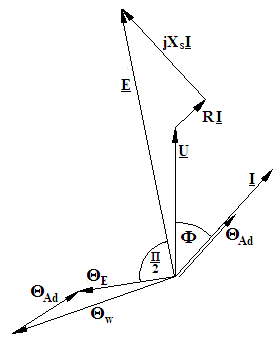
4. Wykres wskazowy.
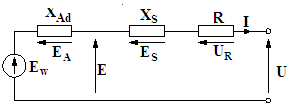
Schemat zastępczy maszyny synchronicznej przy zwartym obwodzie wirnika (pytanie 4) i wykres wskazowy przy pracy silnikowej:
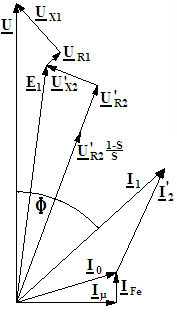
- napięcie doprowadzone do stojana
- prąd jałowy
- prąd w stojanie
- prąd w wirniku odniesiony do stojana
- spadek napięcia na reaktancji rozproszenia
- spadek napięcia na rezystancji stojana
- napięcie indukowane
- rzeczywisty spadek napięcia na rezystancji wtórnika odniesiony do obwodu stojana
- spadek napięcia nieruchomego wirnika odniesiony do stojana
- spadek napięcia odniesiony do obwodu stojana odpowiadający mocy mechanicznej
5. Stan jałowy i stan zwarcia.
Stan jałowy - stan pracy, w którym uzwojenie wirnika jest zamknięte, do uzwojenia stojana doprowadzamy napięcie a wał nie jest obciążony żadnym momentem. Wirnik wiruje z prędkością zbliżona do synchronicznej - bardzo mały poślizg. W stojanie płynie prąd składający się z prądu wirnika odniesionego do stojana, z prądu magnesującego (biernego) oraz prądu czynnego odpowiadającego stratom w rdzeniu. Moc oddawana przez silnik jest równa zeru, więc moc pobierana w całości idzie na pokrycie strat: w uzwojeniu stojana, w rdzeniu stojana, mechanicznych:
.
Charakterystyki stany jałowego:
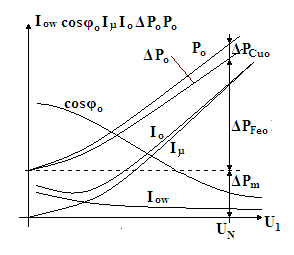
- moc pobierana
- straty jałowe, które nie zależą od obciążenia
- straty w uzwojeniu stojana
- straty w stali stojana
- straty mechaniczne
- prąd jałowy
- prąd magnesujący bierny
- prąd czynny
- współczynnik mocy
Znaczny prąd jałowy (w porównaniu ze znamionowym) i mały współczynnik mocy stanowią wady silnika asynchronicznego. Pobierana przez silnik moc bierna blokuje źródła zasilania i sieć zasilającą. Przyczyną poboru dużego prądu jałowego jest szczelina powietrzna w obwodzie magnetycznym przez którą przechodzi strumień główny. Im jest ona grubsza tym większy jest prąd jałowy.
Stan zwarcia - uzwojenia nieruchomego wirnika jest zwarte, do stojana doprowadzone jest napięcie. Pobierana przez maszynę moc elektryczna w całości zamieniana jest na ciepło. Moc mechaniczna nie jest wydalana ponieważ wirnik się nie obraca. Całkowita pobrana moc idzie na pokrycie strat obciążeniowych w uzwojeniu stojana i wirnika:
.
Charakterystyki stanu zwarcia:
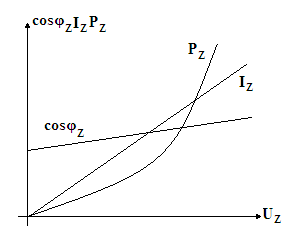
Napięcie zwarcia - napięcie jakie należy doprowadzić do jednej ze stron oby przy zwarciu uzwojenia drugiej strony i nieruchomym wirniku otrzymać prąd znamionowy po stronie zasilanej
Prąd zwarcia - jest to prąd jaki pobiera maszyna w stanie zwarcia, gdy zasilimy ją napięciem znamionowym.
W maszynach asynchronicznych stan zwarcia występuje w chwili początkowej przy każdorazowym rozruchu (n=0)
Zależność pomiędzy prądem zwarciowym IZ, prądem znamionowym IN, i napięciem zwarcia uz%:
.
Pomiar prądu zwarciowego jest trudny ze względu na grzanie się maszyny i niezbędną moc źródła zasilania, dlatego pomiary przeprowadza się przy obniżonym napięciu zasilania. W maszynach asynchronicznych stan zwarcia występuję każdorazowo podczas rozruchu maszyny.
6. Bilans mocy i sprawność (wykres Sankey`a).
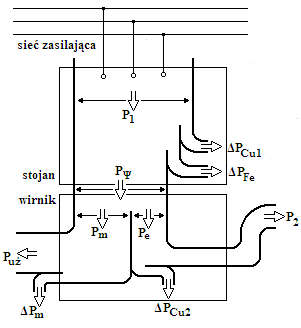
- moc pobierana z sieci zasilającej
- straty mocy w uzwojeniu stojana
- straty mocy w rdzeniu stojana
- moc elektromagnetyczna - przekazywana ze stojana do wirnika za pośrednictwem wirującego pola magnetycznego. Dzieli się ona na moc elektryczną i mechaniczną:
.
- moc użyteczna - wydawana do napędzanej maszyny
- straty mechaniczne
- straty w uzwojeniu wirnika
- moc elektryczna wirnika
- moc wydawana do odbiornika
- straty w uzwojeniach związane są z ciepłem które wydziela się gdy przez przewód czy uzwojenie płynie prąd
- straty w rdzeniu (żelazie) powstają w wyniku nagrzewania się materiału ferromagnetycznego poddanego działaniu zmiennego pola magnetycznego. Dzielą się na straty z histerezy i wiroprądowe.
Maszyny asynchroniczne należy konstruować tak aby pracowały przy możliwie najmniejszym poślizgu. Wynika to następujących zależności:
Im mniejszy poślizg przy pracy znamionowej tym mniejsze są straty w wirniku a większa część mocy wirującego pola zmienia się w moc mechaniczną, zatem wzrasta sprawność silnika:
7. Elektromagnetyczny moment obrotowy.
Moment obrotowy jest to pojęcie określające wydajność obrotową wirnika. Każdy silnik ma swój maksymalny moment obrotowy. Obciążenie powyżej tej wartości oznacza, że silnik nie będzie w stanie wykonywać ruchu wirowego. Przy normalnym obciążeniu silnik pracuje najczęściej poniżej maksymalnej wartości momentu obrotowego, jednakże faza rozruchu wywołuje dodatkowe obciążenie. Moment elektromagnetyczny maszyny asynchronicznej wytworzony przez strumień
w przestrzennym rozkładzie pola i gęstość liniową prądu
wyznaczamy ze wzoru:
. Moment możemy wyznaczyć również w znając moc mechaniczną i prędkość obrotową wirnika:
{Prędkość kątowa wirnika:
}. W praktyce bardziej przydatna jest zależność między momentem użytecznym na wale a mocą oddawaną. Mimo iż moment użyteczny równi się od momentu elektromagnetycznego o moment tarcia, a moc użyteczna od mechanicznej o straty mechaniczne, zależność ta jest określana podobnie:
.
8. Moment i poślizg krytyczny.
Badając przebieg zmienność funkcji M=f(s) przy U1=const i f1=const oraz przyrównując do zera pierwszą pochodną
funkcja ma dwa ekstrema przy poślizgach nazywanych krytycznymi:
.
Moment krytyczny jest to największa wartość momentu elekromagnetycznego w zakresie poślizgów
:
.
Poślizg krytyczny jest funkcją rezystancji obwodu wirnika, natomiast moment krytyczny zależy głównie od napięcia zasilania U1 oraz reaktancji
rozproszenia obwodu stojana XS1 oraz wirnika XS2.
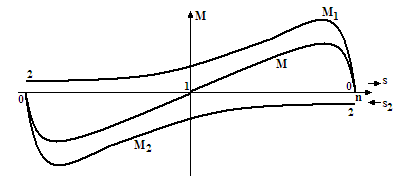
9. Wzór Kloss`a, wyznaczenie charakterystyki mechanicznej M=f(s).
Wartość momentu przy różnych poślizgach można obliczyć stosując wzór Klossa:
. Wzór ten określa zależność pomiędzy momentem wytwarzanym w maszynie, momentem krytycznym, poślizgiem i poślizgiem krytycznym.
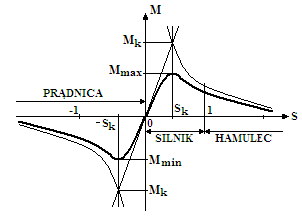
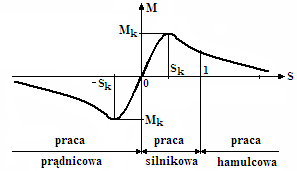
W zakresie 0<s<1 maszyna wytwarza dodatni moment elektromagnetyczny, a wirnik wiruje z prędkością dodatnią 0<n<n1 (zgodnie z kierunkiem wirowania pola magnetycznego). Maszyna pracuje jako silnik.
Dla poślizgów s>1 prędkość jest ujemna n<0 co oznacza, że wirnik wiruje z kierunku przeciwnym do kierunku wirowania pola magnetycznego, a mimo to moment elektromagnetyczny jest dodatni. Taka sytuacja występuje gdy wirnik będzie miał jakiś bodziec zewnętrzny obracający go w kierunku przeciwnym. Mamy wówczas do czynienia z pracą hamulcowa maszyny.
Dla poślizgów s<0 maszyna wiruje w kierunku zgodnym z kierunkiem wirowania pola ale z prędkością większą od synchronicznej n>n1. Wirnik jest napędzany z zewnątrz, a maszyna wytwarza ujemny moment elektromagnetyczny, co jest równoważne z oddawaniem energii do sieci - praca prądnicowa.
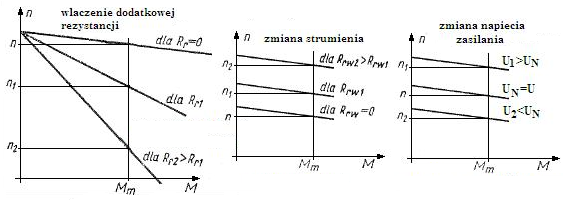
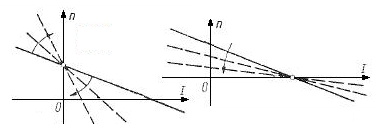
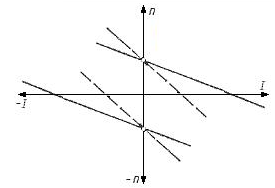
10. Charakterystyka mechaniczna M=f(s) i zależność jej przebiegu od parametrów uzwojeń.
Wpływ zmiany napięcia na przebieg charakterystyki momentu:
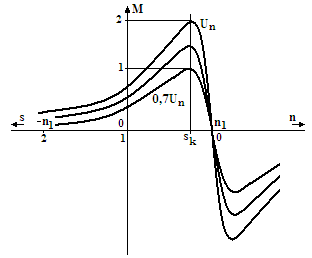
Porównując wartość momentu przy tym samym poślizgu i różnych napięciach zasilających można zauważyć wyraźny wpływ zmian napięcia U1 na przebieg charakterystyki momentu ponieważ zależy on od kwadratu napięcia:
przy s=const.
Jest to niekorzystne dla pracy maszyny, gdyż moment obrotowy użyteczny gwałtownie się zmniejsza przy obniżeniu napięcia zasilania co grozi zatrzymaniem się silnika.
Wpływ zmiany rezystancji włączonej w obwód wirnika na przebieg charakterystyki momentu:
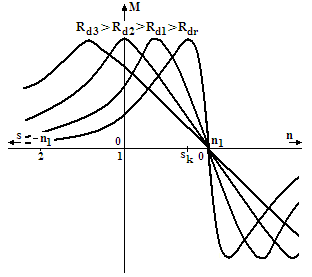
Moment krytyczny nie zależy od rezystancji obwodu wirnika, natomiast przy rezystancji dodatkowej poślizg krytyczny wynosi:
Rezystancja dodatkowa zapewnia maksymalny moment początkowy podczas rozruchu silnika. Zwiększenie rezystancji powoduje przesunięcie się poślizgu krytycznego na zakres pracy hamulcowej i odpowiednie zmniejszenie momentu.
Właściwości ruchowe maszyny charakteryzuje wartość największego momentu występującego przy zasilaniu napięciem znamionowym. Wartość tę określa się za pomocą stosunku momentu maksymalnego do momentu znamionowego, który nazywamy przeciążalnością silnika:
. Przeciążalność określa górną granicę obciążenia maszyny momentem. Po jej przekroczeniu silnik zatrzymuje się.
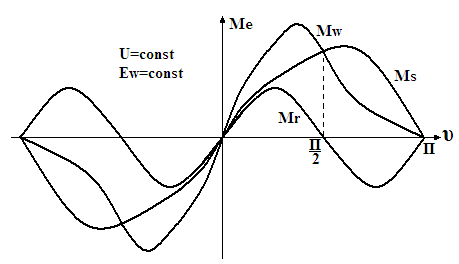
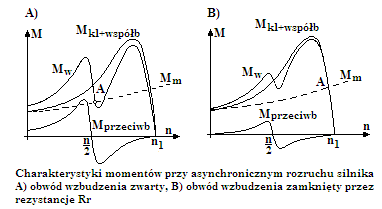
11. Momenty pasożytnicze (asynchroniczne i synchroniczne).
Momenty pasożytnicze są to momenty wytwarzane przez oddziaływanie na siebie przepływów wyższych harmonicznych, które mogą poważnie utrudniać lub wręcz nawet uniemożliwiać właściwą pracę maszyny.
Pole magnetyczne stojana i wirnika podstawowej harmonicznej są względem siebie nieruchome przy każdej prędkości wirnika. Moment wytworzony przez podstawową harmoniczną jest momentem asynchronicznym. Powstaje on przy dowolnej prędkości wirnika z wyjątkiem prędkości synchronicznej. Jest to cecha maszyn asynchronicznych, w których przepływ jednego z obwodów jest wywołany przez przepływ obwodu drugiego. Wartość momentu asynchronicznego, wytworzonego przez określoną harmoniczna zależy przede wszystkim od wartości przepływu stojana danej harmonicznej, na który istotny wpływ ma współczynnik uzwojenia kuυ:
- określa rząd wyższej harmonicznej przepływu, która przybiera największą wartość (największa wartość posiada harmoniczna rzędu:
). Udział momentów asynchronicznych wytwarzanych przez wyższe harmoniczne można zmniejszyć przez dobór odpowiedniego uzwojenia stojana (o małym współczynniku uzwojenia). Momenty pasożytnicze można dodatkowa zmniejszyć przez skośne wykonanie żłobków oraz powiększenie szczeliny między stojanem i wirnikiem.
Moment synchroniczny jest to moment występujący w przypadku wzajemnego oddziaływania dwu niezależnych od siebie przepływów (stojana i wirnika) o takich samych liczbach par biegunów, jeżeli są one względem siebie nieruchome. Wśród przepływów stojana i wirnika istnieją takie, które wirują względem siebie przy różnych prędkościach wirnika z wyjątkiem tej prędkości przy której przepływy te są względem siebie nieruchome. Przy tej prędkości powstaje moment synchroniczny. Momenty synchroniczne mogą występować przy różnych prędkościach, również przy nieruchomym wirniku. Momenty o znacznych wartościach mogą wystąpić dla tych harmonicznych, których przepływ stojana i wirnika przybiera największe wartości. Warunki sprzyjające powstawaniu momentów synchronicznych:
lub
. Przy niewłaściwym doborze liczby żłobków w stojanie i wirniku powstają siły naciągu magnetycznego o nierównomiernych rozkładzie na obwodzie maszyny i wirują wzdłuż obwodu stojana i wirnika. Pod wpływem działania tych sił powstają silne drgania i niepożądane efekty akustyczne.
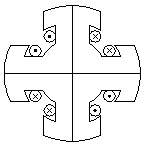
12. Silniki dwuklatkowe i głębokożłobkowe.
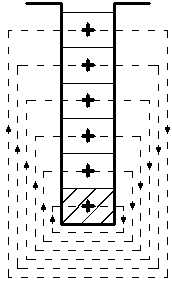
Silnik głębokożłobkowy - żłobek wirnika przyjmuje kształt, w którym stosunek szerokości do wysokości jest rzędu 1:10. Jeżeli przez pręt umieszczony w żłobku płynie prąd przemienny to powstaje strumień magnetyczny rozproszenia. Dolne warstwy pręta będą skojarzone z większym strumieniem rozproszenia niż górne. Wartość prądu płynącego w poszczególnych warstwach zależy od indukowanego napięcia i impedancji tej warstwy. Ponieważ we wszystkich warstwach napięcie indukowane jest takie samo, o rozpływie prądu decyduje impedancja warstwy. O wartości impedancji poszczególnych warstw decyduje:
- przy postoju lub przy bardzo małych prędkościach obrotowych reaktancja XS2>>R2
- przy prędkościach zbliżonych do znamionowych reaktancje można pominąć w stosunku do rezystancji R2.
Przy postoju silnika przez warstwy położone głębiej w żłobku płynie znikomo mały prąd, a przez warstwy górne duży prąd. Występuje zjawisko wypierania strug prądu ku górnym warstwom. Zjawisko to wykorzystywane jest przy rozruchu silnika. W początkowym okresie rozruchu prąd płynie wyłącznie przez górne warstwy - jest to równoznaczne ze zrostem rezystancji R2. Wzrost ten wpływa na wzrost momentu rozruchowego oraz na zmniejszenie prądu rozruchowego. Wzrost prędkości powoduje, że rozkład prądu staje się coraz bardziej równomierny, rezystancja R2 stopniowo maleje. Przebieg takiego zjawiska równoważny jest z włączeniem dodatkowej rezystancji w obwód uzwojenia wirnika w chwili uruchomienia i stopniowym jej zmniejszaniu w miarę wzrostu prędkości. Typowy silnik głębokożłobkowy odznacza się powiększonym momentem rozruchowym. Z tego względu stosowane są do pracy w ciężkich warunkach rozruchowych.
Charakterystyka momentu i prądu silnika głębokożłobkowego:
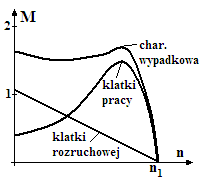
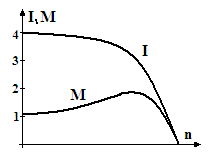
Charakterystyka mechaniczna silnika dwuklatkowego
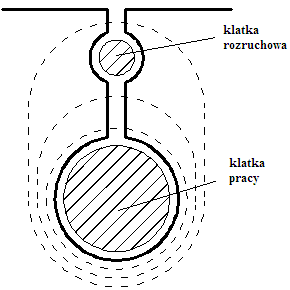
Silnik dwuklatkowy - zbudowany jest z klatki zewnętrznej (rozruchowej) wykonanej z prętów o znacznie mniejszym przekroju niż w klatce wewnętrznej (pracy). Klatka zewnętrzna, a małym przekroju ma dużą rezystancje, natomiast małą. Przepływający przez pręty prąd powoduje powstanie strumieni rozproszonych. Ze względu na małą reluktancje klatki wewnętrznej wokół niej zamknie się więcej linii pola niż wokół klatki zewnętrznej. Wynika stąd że reaktancja rozproszenia klatki pracy jest znacznie większa od reaktancji rozproszenia klatki zewnętrznej. W początkowym okresie rozruchu reaktancja klatki wewnętrznej jest tak duża, że płynie przez nią znikomo mały prąd w porównaniu z prądem płynącym w klatce zewnętrznej. Prąd płynie głównie przez klatkę zewnętrzną (rozruchową). W okresie rozruchu zostaje w sztuczny sposób powiększona rezystancja w obwodzie wirnika w skutek tego moment rozruchowy wzrasta, a prąd rozruchowy maleje. Zwiększenie prędkości powoduje, że prąd będzie płynął tylko przez klatkę wewnętrzną. Wzrostowi prędkości towarzyszy samoczynny zanik zjawiska wypierania prądu z klatki pracy, podobny do stopniowego wyłączenia rezystancji w silniku pierścieniowym.
13. Rozruch silników.
Rozruchem nazywamy stan pracy od chwili załączenia napięcia do osiągnięcia przez maszynę ustalonej prędkości, określonej parametrami zasilania (napięcie i częstotliwość) i obciążenia (moment hamujący). Rozruch silnika jest możliwy gdy występuje nadwyżka momentu wytworzonego przez silnik nad momentem obciążenia. Przy rozpatrywaniu rozruchu bardzo istotna jest wartość prądu rozruchowego (pobieranego z sieci), wartość momentu rozruchowego (rozwijanego przez silnik w czasie rozruchu) oraz czas trwania rozruchu.
Rozruch bezpośredni, polegający na zasileniu silnika pełnym napięciem znamionowym stosuje się tylko przy silnikach małych mocy. Dla silników większych mocy stosuje się różne sposoby poprawy warunków rozruchu silnika:
- zmniejszenie prądu rozruchowego
- zwiększenie momentu rozruchowego
Rozruch za pomocą rozrusznika (tylko dla silników pierścieniowych)
Polega na włączeniu w obwód uzwojenia wirnika nastawnej rezystancji zwanej rozrusznikiem. Zmiana rezystancji wpływa na zmianę momentu i prądu rozruchowego. Rozruch dokonuje się przy największej wartości rezystancji rozrusznika. Po osiągnięciu odpowiedniej prędkości obrotowej przełącza się rozrusznik na następny stopień aż do zwarcia rozrusznika. Przełączenia powinny następować w takiej chwili aby nie pojawił się prąd większy niż początkowy prąd rozruchowy. Przedwczesne przełączanie powodowałoby nadmierne uderzanie prądu i zwiększenie momentu obrotowego. Zbyt późne przełączanie wydłużyłoby czas trwania 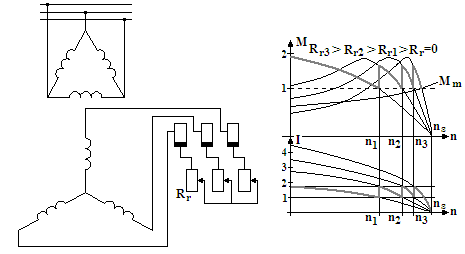
rozruchu. Im większa jest liczba stopni rozrusznika, tym płynniejszy i krótszy jest rozruch. Rozrusznik przeznaczony jest do pracy dorywczej lub przerywanej dlatego nie można używać go do pracy ciągłej (nadmierne nagrzanie i uszkodzenie).
Samorozruch silnika - przy krótkotrwałym lub znacznym obniżeniu napięcia następuje zmniejszenie prędkości obrotowej i silnikowi grozi utknięcie. Jeżeli czas trwania zaniku napięcia jest krótszy od czasu potrzebnego na zatrzymanie się od chwili wyłączenia silnika z sieci, to w określonych warunkach jest możliwe utrzymanie silnika w ruchu i w miarę wzrostu napięcia powrót do normalnego stanu pracy po pewnym czasie.
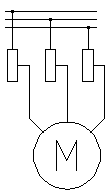
Rozruch silników klatkowych:
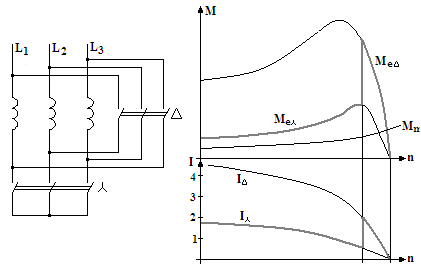
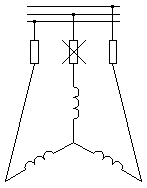
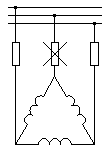
- za pomocą przełącznika gwiazda-trójkąt:
Silnik załącza się do sieci przy uzwojeniu stojana połączony w gwiazdę. Wirnik zaczyna wirować. W chwili, gdy ustali się prędkość obrotowa wirnika, uzwojenie przełączamy w trójkąt. Przy połączeniu w gwiazdę napięcie każdej fazy uzwojenia stojana jest
-krotnie mniejsze niż napięcie znamionowe. Prąd pobierany w tym stanie z sieci jest w przybliżeniu 3-krotnie mniejszy niż prąd płynący przy połączeniu w trójkąt. Podobnie moment rozruchowy jest również 3-krotnie mniejszy. Sposób ten stosuje się do rozruchów lekkich (silnik obciążony niewielkim momentem hamującym).
- za pomocą autotransformatora: - za pomocą rezystancji włączonej w obwód stojana:
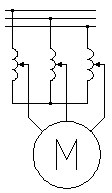
Zastosowanie autotransformatora Sposób ten stosuje się dla silników małej umożliwia zmniejszenie w tym samym mocy, ponieważ uzyskuje się tu ograniczenie stosunku prąd rozruchowy pobierany z prądu rozruchowego oraz jednoczesne sieci oraz moment rozruchowy. zmniejszenie momentu rozruchowego. Wartość tego stosunku jest równa kwadratowi zastosowanej przekładni autotransformatora.
14. Regulacja prędkości obrotowej.
Regulacja prędkości obrotowej jest możliwa przez zmianę:
- częstotliwości zasilania - zmniejszając częstotliwość regulujemy prędkość obrotową wirującego pola, w rezultacie regulujemy prędkość obrotową wirnika. Zmieniając częstotliwość należy również regulować napięcie U1 ponieważ przy stałej wartości napięcia zasilania wzrost częstotliwości powodowałby zmniejszenie się strumienia (wzrost prądu obciążenia). Metoda wymaga zastosowania dodatkowego źródła zasilania.
- liczny par biegunów - osiągamy stosując dwa niezależne uzwojenia w stojanie o różnych liczbach biegunów magnetycznych lub zastosować jedno uzwojenie, które można tak przełączać, aby wytwarzało pola o różnych liczbach par biegunów. Umieszczenie w stojanie dwóch niezależnych uzwojeń o różnych liczbach par biegunów umożliwia skokową regulacje prędkości obrotowej przez zmianę uzwojenia przyłączonego do sieci zasilającej. Otrzymuje się wówczas pole wirujące w obu przypadkach z różną prędkością synchroniczną. Moment obrotowy powstaje wówczas gdy liczba biegunów w stojanie i wirniku jest taka sama, dlatego regulacje tą stosuje się w silnikach klatkowych.
- rezystancji w obwodzie wirnika:
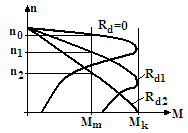
Powoduję zmianę przebiegu charakterystyki mechanicznej (przy U1=Conde). Jeżeli silnik pracuje ze zwartymi pierścieniami Rd=0 i napędza maszynę robocza o stałym momencie Mm niezależnym od prędkości obrotowej to po włączeniu rezystancji dodatkowej w obwód wirnika ustali się nowy punkt pracy przy zmniejszonej prędkości obrotowej wirnika. Dalszy wzrost rezystancji powoduje dalsze zmniejszanie prędkości. Prędkość regulujemy w dół od wartości znamionowej do dowolnie małej.
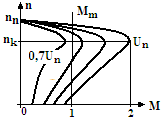
- napięcia zasilania stojana:
Zmniejszenie napięcia zasilania powoduje zmniejszenie wartości momentu maksymalnego przy stałym poślizgu krytycznym. Zmniejszenie napięcia z Un1 do 0,7Un1 spowoduje utknięcie silnika Mmax<Mm. Zakres regulacji jest bardzo mały (regulacja w dół w obszarze do sk). Zmniejszanie napięcia powoduje wzrost prądu w obwodzie wirnika i stojana. Regulacja ta jest rzadko stosowana.
- napięcia w obwodzie wirnika - należy dodatkową maszynę do obwodu wirnika maszyny asynchronicznej. Powstaje w ten sposób zespół maszyn zwany układem kaskadowym. Regulacja prędkości obrotowej i kompensacja współczynnika mocy polega na regulacji wartości i fazy napięcia maszyny dodatkowej przy zachowaniu takiej częstotliwości jaka występuje w obwodzie wirnika stojana. W zależności od tego czy dokonuje się przetwarzanie częstotliwości f2 w częstotliwość sieci zasilającej czy też przetwarzanie prądu przemiennego w prąd stały, omawiany układ nazywamy kaskadą prądu przemiennego lub kaskadą prądu stałego. Zaletą tych układów jest to, że w przypadku regulacji prędkości obrotowej w dół moc wydawana w obwodzie wirnika odzyskiwana jest jako moc elektryczna lub mechaniczna.
15. Silniki jednofazowe.
W stojanie silnika umieszczone jest uzwojenie jednofazowe, natomiast wirnik na ogół jest klatkowy. Prąd przemienny doprowadzony do uzwojenia stojana wytwarza pole magnetyczne, które można rozłożyć na dwa pola kołowe wirujące w przeciwnym kierunkach. Pola te indukują w uzwojeniu klatkowym siły elektromotoryczne. Klatka wirnika wytworzy również dwa pola magnetyczne wirujące w przeciwnych kierunkach. Oddziaływanie pól magnetycznych stajana z wirnikiem powoduje powstanie dwóch momentów elektromagnetycznych. Dodając je do siebie otrzymamy charakterystykę momentu silnika jednofazowego. Z charakterystyki widać, że silnik nie wytworzy początkowego momentu rozruchowego oraz nie ma określonego kierunku wirowania. Silnik można uruchomić w obu kierunkach przez mechaniczne nadanie wirnikowi prędkości początkowej, przy której moment elektromagnetyczny jest większy od momentu obciążającego wirnik. Brak momentu rozruchowego jest podstawową wadą silnika.
Sposoby wytwarzania momentu rozruchowego:
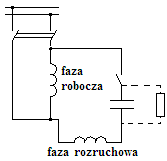
- silnik z fazą rozruchową:
W stojanie maszyny umieszczamy oprócz uzwojenia fazy roboczej uzwojenie dodatkowe, której oś tworzy w przestrzeni z osią fazy roboczej kąt elektryczny (np. 90o). jeżeli prądy płynące w tych dwu uzwojeniach będą przesunięte względem siebie w fazie o dany kąt to powstanie pole wirujące kołowe. W chwili zasilenia nieruchomego silnika napięciem pojawi się moment rozruchowy. aby uzyskać przesunięcie fazowe pomiędzy prądami w fazie roboczej i rozruchowej, włączamy w szereg z fazą rozruchową kondensator lub rezystor.
- silnik z umieszczonym zwojem zwartym na części jawnego bieguna w stojanie. Powstają wówczas dwa strumienie o osiach przesuniętych względem siebie w przestrzeni i o pewnym przesunięciu fazowym. Wobec tego pole wypadkowe jest wirujące i zapewnia powstanie momentu rozruchowego.
16. Praca silnika w warunkach różnych od znamionowych.
Praca silnika przy zasilaniu jednofazowym:
Może wystąpić gdy przepali się bezpiecznik jednej z faz. Wówczas gdy silnik był połączony w gwiazdę dwie fazy połączone są ze sobą w szereg a trzecia nieczynna (silnik pracuje jako jednofazowy). Gdy uzwojenia połączone były w trójkąt również pracuje jako silnik jednofazowy, z tym że jedna faza jest połączona równolegle w stosunku do pozostałych. Jeżeli przerwa w obwodzie jednej fazy nastąpi podczas pracy silnika, to silnik będzie pracował dalej ale prąd pobierany z sieci wzrośnie
razy. Gdy przerwa nastąpi przy znamionowym obciążeniu będzie on przeciążony i może ulec uszkodzeniu. Jeżeli silnik stoi, to przy przewie w jednej fazie nie może on samodzielnie ruszyć.
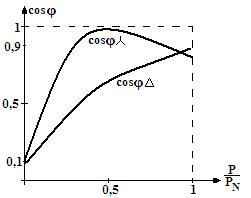
Praca silnika przy połączeniu w gwiazdę i trójkąt:
W chwili rozruchu prąd pobierany przez silnik zależy od napięcia przypadającego na jedną fazę silnika i od impedancji tej fazy. Przy obciążeniu prąd pobierany przez silnik zależy od obciążenia a nie od impedancji uzwojenia. Prąd fazowy przy połączeniu w gwiazdę i w trójkąt będzie taki sam, natomiast prąd przewodowy przy połączeniu w gwiazdę nie zmieni się, a przy połączeniu w trójkąt będzie
razy większy. Stosunek mocy przy obu połączeniach wynosi:
. Przy założeniu cosφΔ=cosφ stosunek wyniósłby
. Współczynnik mocy przy gwieździe jest na ogół większy niż przy trójkącie. Z charakterystyki wynika, że silnik pracuje przy obciążeniu w granicach 0,4-0,6 mocy znamionowej to korzystne jest połączenie w gwiazdę ze względu na większy współczynnik mocy z jakim pracuje silnik.
17. Stabilność pracy silników indukcyjnych.
Stabilność pracy związana jest z właściwościami maszyn pracujących pod obciążeniem. Można wyróżnić dwa stany mechaniczne:
- stan ustalony - prędkość obrotowa (kątowa) jest stała. Jest to stan, w którym moment M rozwijany przez silnik jest równy co do wartości, lecz przeciwnie skierowany do statycznego momentu obciążenia maszyny napędzanej.
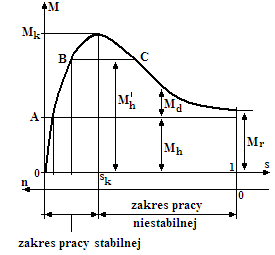
- stan nieustalony, w którym prędkość obrotowa się zmienia. Sytuacja występuje gdy nie zachodzi równowaga momentu rozwijanego przez silnik i momentu hamującego:
- moment dynamiczny. Jeżeli Md>0 to układ przyspiesza, gdy Md<0 układ zwalnia. Obowiązuje wtedy zależność:
gdzie J jest momentem bezwładności części wirujących zespołu. W przypadku gdy moment bezwładności nie jest funkcją położenia otrzymujemy:
.
Stany nieustalone w pracy maszyn wirujących występują w różnych warunkach pracy, przy: rozruchu, regulacji prędkości obrotowej, zatrzymywaniu się układu, zmianie obciążenia, zmianie warunków zasilania.
Przy zaburzeniu równowagi momentów zespołu pracującego dotychczas w stanie ustalonym mogą zaistnieć dwa przypadki:
- praca stabilna - jeżeli po zniknięciu krótkotrwałego zaburzenia układ wraca do stanu równowagi
- praca niestabilna - jeżeli w przypadku zaburzenia układ zatrzymuje się lub wykazuje tendencje do rozbiegania się (nieograniczony wzrost prędkości).
W zakresie poślizgów 0<s<sk (zakres pracy stabilnej) następuje samoczynne dostosowanie parametrów pracy silnika do wartości momentu hamującego, powodując przy każdej wartości tego momentu odpowiedni stan ustalony.
W zakresie poślizgów sk<s<1 mamy zakres pracy niestabilnej.
Moment silnika jest proporcjonalny do kwadratu doprowadzonego napięcia, zatem każde obniżenie napięcia w sieci spowoduje znacznie zmniejszenie momentu wytworzonego przez silnik. Z tego względu punkt pracy znamionowej silnika musi leżeć w zakresie pracy stabilnej dość daleko od momentu krytycznego, takk aby obniżenie napięcia nie powodowało zahamowań silnika. Najczęściej moment znamionowy silnika indukcyjnego jest co najmniej 2 razy mniejszy od jego momentu krytycznego czyli przeciążalność silnika wynosi:
.
18. Wykres kołowy.
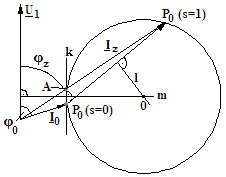
Wykres kołowy maszyny indukcyjnej przedstawia na płaszczyźnie zespolonej miejsca geometryczne końców wektorów prądu uzwojeń wirnika i stojana przy zmianach poślizgu maszyny pracującej przy niezmiennych warunkach zasilania i niezmiennych impedancjach zewnętrznych włączonych w obwód uzwojeń. Mając wykres kołowy maszyny indukcyjnej można z niego wyznaczyć prądu uzwojeń, współczynnik mocy, moment elektromagnetyczny, bilans mocy i strat przy dowolnym poślizgu.
Przy konstrukcji wykresu kołowego punktem wyjścia są dwa charakterystyczne stany: idealny bieg jałowy (s=0) oraz stan zwarcia (s=1). Punkty te wyznaczamy znając wartość prądów Io oraz Iż a także współczynników mocy cosφO oraz cosφZ. Przez punkt P0 prowadzimy prostą k równoległą do U1. Przetnie ona prąd IZ w punkcie A. symetralna odcinka P0A wraz z symetralna odcinka P0P1 wyznaczają punkt 0 będący środkiem okręgu.
1. Zasada działania, budowa.
Wirnik z biegunami utajonymi: wirnik z biegunami jawnymi:
Maszyny synchroniczne buduje się jako trójfazowe. Uzwojenie twornika umieszczone jest w stojanie a uzwojenie wzbudzenia zasilane prądem stałym w wirniku. Obwód magnetyczny stojana tworzą pakiety blach. Rdzeń osadzony jest w korpusie wykonanym jako odlew lub konstrukcja spawana. W żłobkach pakietu umieszczone jest uzwojenie prądu przemiennego. Wirnik maszyny wykonuje się z litego materiału. Na wirniku umieszczone jest uzwojenie wzbudzające zasilane prądem stałym. Uzwojenie to może być umieszczone w żłobkach w maszynie z biegunami utajonymi (z wirnikiem cylindrycznym) lub na biegunach jawnych (z wirnikiem jawnobiegunowym). Maszyny z biegunami utajonymi pracują z dużymi prędkościami obrotowymi (turbogeneratory). Maszyny z biegunami jawnymi to maszyny wolnobieżne (hydrogeneratory).
Zasada działania:
Zasilenie trójfazowego uzwojenia stojana z częstotliwością f1 powoduje powstanie pola wirującego kołowego z prędkością
. Zasilenie wirnika prądem stałym wytworzy w nim pole stałe, które powinno mieć taką samą liczbę par biegunów jak pole stojana. Przy nieruchomym wirniku powstaje moment przemienny, którego średnia wartość jest równa zero. Moment obrotowy o średniej wartości różnej od zera może powstać tylko przy prędkości synchronicznej - moment synchroniczny. Wirnik po uzyskaniu prędkości synchronicznej podąża za polem magnetycznym stojana utrzymując się w stanie synchronizmu wskutek działań dynamicznych występujących pomiędzy polem stojana i wirnika. Maszynę nazywamy synchroniczną ponieważ jej praca możliwa jest tylko przy prędkości synchronicznej. Jeżeli pracuje przy zmianach obciążenia to zmienia się kąt zawarty pomiędzy osiami pól. Zmiany obciążenia nie powodują zmiany prędkości obrotowej z wyjątkiem sytuacji kiedy maszyna zostałaby obciążona momentem większym niż maksymalny moment elektromagnetyczny jaki występuje przy kącie 90o - maszyna wypada wówczas z synchronizmu i zatrzymuje się po pewnym czasie. Maszyna synchroniczna może pracować jako prądnica. Należy wówczas wirnik napędzać mechanicznie. Wytworzone pole wirnika wiruje względem stojana indukując w jego uzwojeniu napięcie. Wówczas pole wirnika pociąga za sobą pola stojana wirujące z prędkością synchroniczną.
2. Oddziaływanie (reakcja) wtórnika w różnych stanach obciążenia w maszynie o biegunach jawnych i utajnionych.
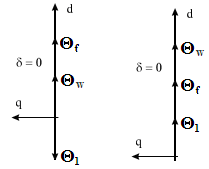
Wirujący strumień wywołany trójfazowymi symetrycznymi prądami stojana nazywa się strumieniem oddziaływania twornika. Przepływ oddziaływania twornika przy obciążeniu rezystancyjnym działa w kierunku osi poprzecznej. W maszynie występuje wówczas równocześnie strumień wzbudzenia oraz przepływ stojana. Strumienie te są prostopadłe względem siebie i obracają się w tę samą stronę z tą samą prędkością. Wytworzony moment stara się spowolnić prędkość wirnika. Zatem im większe będzie obciążenie czynne uzwojeń stojana z tym większym momentem musi być napędzany wirnika maszyny - poprzeczne oddziaływanie twornika.
- przepływ wypadkowy
- przepływ uzwojenia stojana
- przepływ uzwojenia wzbudzenia
- kat obciążenia
Obciążenie: indukcyjne pojemnościowe
W przypadku obciążenia indukcyjnego (cosφ=0) przepływ uzwojeń stojana będzie działał w osi podłużnej ale skierowany będzie w ujemną stronę. Oddziaływanie takie nosi nazwę oddziaływaniem podłużnym rozmagnesowującym. Obciążenie pojemnościowe spowoduje działania przepływu twornika w kierunku osi wzbudzenia. Jest to podłużne domagnesowujące działanie twornika. Każdy inny przypadek obciążenia można rozłożyć na składową poprzeczną i podłużną, zatem oddziaływanie twornika będzie mieszane.
Wnioski wynikające z występowania oddziaływania twornika:
- poprzeczne działanie twornika w maszynie synchronicznej związane jest z działaniem momentu elektromagnetycznego.
- wskutek podłużnego rozmagnesowującego oddziaływania twornika zmniejsza się strumień wypadkowy w maszynie, zmniejsza się napięcie na zaciskach maszyny.
- wskutek podłużnego domagnesowującego oddziaływania twornika zwiększa się strumień wypadkowy w maszynie oraz zwiększa się napięcie na zaciskach maszyny.
3. Reakcja oddziaływania (reakcji) twornika, reaktancja rozproszenia i reaktancja synchroniczna.
Prąd płynący w uzwojeniu twornika wytwarza strumień, którego część linii przechodzi ze stojana do wirnika tworząc tzw. strumień oddziaływania twornika, który indukuje w uzwojeniu twornika napięcie E. Dla maszyny cylindrycznej reaktancja ta jest stała i niezależna od wzajemnego położenia osi przepływu twornika i osi wirnika. O jej wartości decyduje permanencja drogi magnetycznej strumienia oddziaływania twornika, która jest stała. W maszynie jawnobiegunowej kąt pomiędzy osią pola stojana i wirnika zmienia się w zależności od rodzaju pracy i obciążenia. Zmianie ulega permanencja drogi wzdłuż której zamyka się strumień wytworzony przez przepływ twornika. Reaktancja oddziaływania twornika zmienia się w szerokim zakresie, dla uproszczenia stosuje się metodę rozkładu przepływu na dwa przepływy składowe: podłużny i poprzeczny. Permanencje drogi przepływu strumienia w obu tych osiach są równe ale stałe.
Reaktancja synchroniczna jest reaktancją uzwojenia stajana odpowiadającą przewodności magnetycznej drogi całego strumienia twornika. Jest to suma reaktancji oddziaływania twornika i reaktancji rozproszenia twornika. Możemy również reaktancje synchroniczną poprzeczną i podłużną.
Reaktancja rozproszenia twornika jest reaktancją związaną ze strumieniem rozproszenia twornika. W obu rodzajach maszyn reaktancja ta ma stałą i taką samą wartość w osi podłużnej i poprzecznej. Drogi strumienia rozproszenia nie zależy od położenia wirnika.
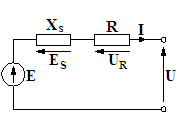
4. Schemat zastępczy i wykres wskazowy maszyny cylindrycznej w stanie nienasyconym.
Maszyna nasycona jest to maszyna której obwód magnetyczny pracuje w obszarze prostoliniowej części charakterystyki magnesowania.
- napięcie indukowane w uzwojeniu twornika przez strumień
(wywołany przez prąd płynący w uzwojeniu wzbudzenia).
- reaktancja oddziaływania twornika odpowiadająca strumieniowi oddziaływania
twornika indukującemu w uzwojeniu twornika napięcie
.
- reaktancja rozproszenia twornika odpowiadająca strumieniowi rozproszenia,
indukującego w uzwojeniu twornika napięcie
- rezystancja uzwojenia twornika
Schemat i wykres wskazowy odnoszą się do jednej fazy. Jest to jednak wystarczające ponieważ maszyna trójfazowa jest symetryczna i pracuje przy obciążeniu symetrycznym.
5. Schemat zastępczy i wykres wskazowy maszyny jawnobiegunowej w stanie nienasyconym.
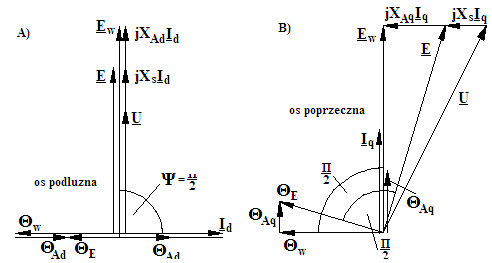
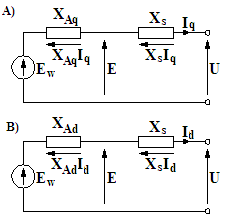
A) - oddziaływanie twornika w osi poprzecznej - stan pracy odpowiadający obciążeniu indukcyjnym.
B) - oddziaływanie twornika w osi podłużnej
- reaktancja oddziaływania twornika podłużna/poprzeczna
- reaktancja rozproszenia twornik
- prąd twornika podłużna/poprzeczna
- napięcie indukowane w uzwojeniu twornika
- przepływ oddziaływania twornika w osi podłużnej/poprzecznej
- przepływ wzbudzenia
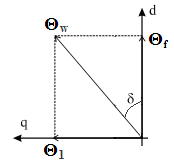
6. Wykres wskazowy maszyny cylindrycznej w stanie nasyconym.
- przepływ wzbudzenia
- przepływ twornika
- przepływ wypadkowy
- napięcie twornika indukowane przez strumień główny
- napięcie indukowane przez strumień rozproszenia
7. Moment obrotowy i charakterystyka kątowa momentu maszyny jawnobiegunwej.
Moment obrotowy - moment reluktancyjny - jest to moment maszyny synchronicznej z biegunami wydatnymi powstały na wskutek tego, iż przewodność magnetyczna drogi strumienia twornika jest w osi podłużnej inna niż w osi poprzecznej:
:
. Moment ten ma wartość niezależną od wzbudzenia. Zjawisko to wykorzystuje się w silnikach reluktancyjnych.
- moment wypadkowy;
- moment synchroniczny;
- moment reluktancyjny
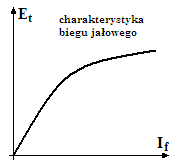
8. Charakterystyki prądnicy.
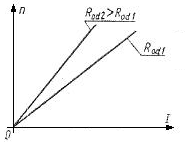
- Charakterystyka biegu jałowego - charakterystyka magnesowania - zależność napięcia indukowanego w tworniku do prądu wzbudzenia przy prądzie twornika równym zeru i przy znamionowej prędkości obrotowej.
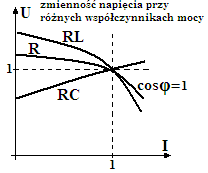
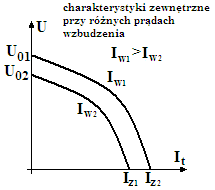
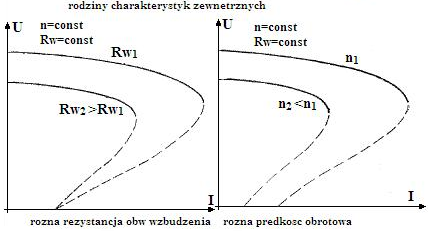
- Charakterystyka zewnętrzna - zależność napięcia na zaciskach prądnicy od prądu twornika przy stałej prędkości obrotowej, stałym prądzie wzbudzenia, stałym współczynniku mocy. Z charakterystyki tej widać, że wartość napięcia biegu jałowego i prądu zwarcia zależą od wartości prądu wzbudzeni. Zwarcie maszyny jest tym bardziej niebezpieczne im większa jest wartość prądu wzbudzenia. Z charakterystyki zmienności napięcia wynika, że wzrost prądu obciążenia o charakterze indukcyjnym odpowiada zmniejszeniu się napięcia na zaciskach prądnicy, odwrotnie dla obciążenia pojemnościowego. Zmienność napięcia jest to wzrost napięcia wyrażony w procentach napięcia znamionowego występujący przy obciążeniu maszyny od pracy znamionowej do biegu jałowego przy znamionowej prędkości obrotowej i znamionowym prądzie wzbudzenia:
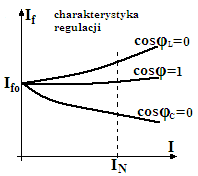
- Charakterystyka regulacji informuje jak należy regulować prąd wzbudzenia aby przy zmianach prądu obciążenia, stałym współczynniku mocy, stałej prędkości obrotowej utrzymać stałe napięcie na zaciskach prądnicy. Przy wzrastającym prądzie obciążenia o charakterze indukcyjnym należy zwiększać prąd wzbudzenia.
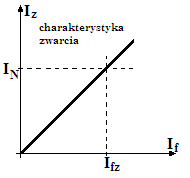
- Charakterystyka zwarcia - zależność prądu twornika od prądu wzbudzenia przy zwarciu zacisków twornika. Charakterystyka zwarcia jest praktycznie niezależna od prędkości obrotowej wirnika z wyjątkiem zakresu bardzo małych poślizgów. Stosunek zwarcia - stosunek znamionowego prądu wzbudzenia w stanie jałowym do znamionowego prądu wzbudzenia przy zwarciu:
.
9. Praca równoległa prądnic, synchronizacja i samosynchronizacja.
Pracą równoległą maszyn synchronicznych nazywa się taka pracę, przy której maszyny synchroniczne są przyłączone do wspólnej sieci. Wymagania jakie powinna spełniać przyłączona prądnica sprowadzają się do tego, aby przy przyłączaniu jej nie powstały zbyt duże udary prądu. Sposoby przyłączania:
- synchronizacja polega na doprowadzeniu maszyny do takiego stanu aby przy przyłączeniu do sieci nie popłynął żaden udar prądu. Musi spełniać warunki: jednakowe skuteczne wartości napięć prądnicy i sieci, ta sama częstotliwość tych napięć, taka sama kolejność faz napięć, zachowana zgodność faz tych napięć. Aby osiągnąć spełnienie tych warunków należy regulować prędkość obrotową turbiny napędzającej prądnice oraz prąd wzbudzenia. W praktyce stosuje się różne urządzenia synchronizujące: dwuukładowy woltomierz i częstościomierz, synchronoskop. Często stosuje się włączenie maszyny w stanie, w którym występują nieznaczne odstępstwa od warunków synchronizacji.
- samosynchronizacja - polega na przyłączeniu do sieci prądnicy niewzbudzonej i doprowadzeniu jej do prędkości bliskiej synchronicznej. Po włączeniu obwodu twornika nastąpi zasilenie obwodu wzbudzenia. Narastanie prądu wzbudzenia powoduje wzrost momentu obrotowego, który powinien wciągnąć wirnik w synchronizm. Im mniejszy jest poślizg w chwili przyłączenia twornika do sieci tym mniejszy jest prąd udar tego prądu. Zastosowanie samosynchronizacji pozwala skrócić czas przyłączania prądnicy do pracy równoległej.
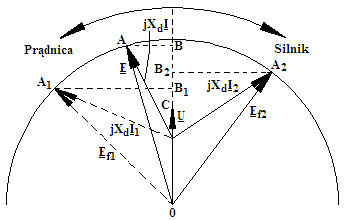
10. Regulacja mocy czynnej i biernej maszyny współpracującej z siecią sztywną.
Sieć sztywna - sieć energetyczna o bardzo dużej mocy i praktycznie stałym napięciu i stałej częstotliwości.
Stan pracy prądnicy pracującej na sieć sztywną można zmienić wpływając:
- na prąd wzbudzenia
- na zmianę momentu napędowego lub obciążenia
Zmiana prądu wzbudzenia powoduje zmianę składowej biernej prądu twornika - współczynnika mocy. Zwiększając prąd wzbudzenia od zera do wartości znamionowej prądnica najpierw jest niedowzbudzona, stanowi ona wówczas dla sieci obciążenie bierne indukcyjne. Dalszy wzrost prądu powoduje, że prądnica zostaje przewzbudzona pobierając moc bierną pojemnościową (wytwarza moc bierną indukcyjną). Regulując prąd wzbudzenia zmieniamy moc bierna wydawaną do sieci. Regulując moc maszyny napędzającej zmieniamy moc czynną wydawana do układu. Zmiana mocy czynnej (odcinek AB) przejście z punktu A2 do A1 powoduje zmianę mocy biernej BO.
11. Moment synchronizujący, przeciążalność statyczna.
Moment synchroniczny
- zależy on od prądu wzbudzenia, ponieważ
zależy od prądu wzbudzenia. Wartość momentu synchronicznego przy kącie
nazywa się momentem maksymalnym. Wartość maksymalna momentu synchronicznego zależy od prądu wzbudzenia.
Przeciążalność maszyny jest to stosunek momentu maksymalnego przy danym napięciu i prądzie wzbudzenia do momentu znamionowego:
. Znajomość momentu znamionowego i przeciążalności pozwala na określenie mocy maksymalnej jaką maszyna może wydać przy znamionowym napięciu i prądzie wzbudzenia. Przekroczenie wartości mocy maksymalnej prowadzi do wypadnięcia maszyny z synchronizmu. Przeciążalność maszyny jest tym większa im większy jest prąd wzbudzenia.
12. Forsowania wzbudzenia i odwzbudzenie.
Forsowanie wzbudzenia polega na szybkim i znacznym wzroście prądu wzbudzenia, w celu utrzymania prądnicy w pracy równoległej i nie dopuszczeniu jej do wypadnięcia z synchronizmu w momencie wystąpienia zwarcia. W czasie trwania zwarcia należy utrzymać stałą wartość strumienia w maszynie. Po ustaniu zwarcia lub wyłączeniu zwartego odcinka układu, prądnica stopniowo powraca do pracy przy normalnym wzbudzeniu.
Odmienne zadanie dla obwodu wzbudzenia powstaje w przypadku nagłego odciążenia przy awaryjny wyłączaniu prądnicy z układu. Aby nie dopuścić do wzrostu napięcia prądnicy należy spowodować zanik strumienia w możliwie krótkim czasie. Zadanie to spełnia układ odwzbudzania. Istnieją duże możliwości odwzbudzania: bezpośrednia przerwa obwodu wzbudzania lub włączenie opornika gaszącego w obwód wzbudzenia przy jednoczesnym zmniejszaniu wzbudzenia prądnicy.
13. Silniki synchroniczne, rozruch, zalety i wady.
Praca silników synchronicznych różni się od prądnicowej kierunkami przepływu mocy czynnej. Przejście do pracy silnikowej nastąpi gdy na wał będzie działał elektromagnetyczny moment napędowy. Powstanie tego momentu spowodowane jest przez współdziałanie pól twornika i wzbudzenia. Zalety silnika synchronicznego:
- możliwość regulacji współczynnika mocy przez regulacje prądu wzbudzenia (przy odpowiednim przewzbudzeniu może wytwarzać moc bierną indukcyjną).
- prędkość obrotowa nie zależy od obciążenia (o ile nie zostanie przekroczony maksymalny moment obciążenia)
- wykazują dużą zdolność do utrzymania w synchronizmie (nie zatrzymuje się przy obniżaniu napięcia zasilania)
Wady:
- kłopotliwy rozruch
- brak momentu rozruchowego - średnia wartość momentu rozruchowego jest równa zero i wirnik nie może ruszyć z miejsca.
Rozruch silnika synchronicznego:
- za pomocą obcej maszyny - silnik załącza się do sieci tak jak prądnice a więc metodą synchronizacji lub samosynchronizacji. Rozruch ten rzadko stosowany.
- asynchroniczny - przeprowadza się przy uzwojeniu wzbudzenia zwartym przez dodatkową rezystancje, w celu zniknięcia indukowania napięć o dużych wartościach. W celu wytworzenia momentu asynchronicznego umieszcza się w nabiegunnikach wirnika klatkę rozruchową. Po załączeniu uzwojeń stojana do sieci powstaje pole wirujące kołowe. Indukuje ono w uzwojeniach wirnika prądy, które powodują powstanie momentu elektromagnetycznego. Wzrost prądu wytworzy moment nadający przyspieszenie przy którym wirnik może wejść w synchronizm. Po osiągnięciu prędkości zbliżonej do synchronicznej odłącza się opornik i włącza napięcie wzbudzenia.
- częstotliwościowy - polega na zasileniu uruchamianego silnika z oddzielnej prądnicy, której prędkość obrotowa a zarazem częstotliwość zwiększa się od zera do prędkości synchronicznej. Stopniowe zwiększanie prędkości prądnicy powoduje, że wirnik silnika będzie podążał za wirnikiem prądnicy. Po osiągnięciu znamionowej prędkości obrotowej odpowiadającej częstotliwości sieci włączamy cały zespół do sieci odłączając prądnice rozruchową.
14. Krzywe V (Mordey`a).
Krzywe V - zależność prądu twornika od prądu wzbudzenia przy stałym napięciu, częstotliwości, mocy czynnej P.

W przypadku pracy prądnicowej warunki te spełnione są gdy prądnica pracuje na sieć sztywną. W przypadku pracy silnikowej, silnik zasilany z sieci sztywnej obciążany stałym momentem i istnieje możliwość regulacji prądu wzbudzenia.
Poszczególne krzywe odpowiadają różnym obciążeniom zmieniającym się od znamionowego do biegu jałowego.
- prąd czynny jałowy - najmniejsza wartość prądu czynnego dla maszyny synchronicznej.
Stan potrzebny do uzyskania współczynnika mocy
nazywa się stanem wzbudzenia normalnego. Prądnice pracująca przy obciążeniu indukcyjnym (silnik przy pojemnościowym) nazywa się przewzbudzoną, natomiast prądnice pracującą przy obciążeniu pojemnościowym (silnik przy indukcyjnym) nazywa się niedowzbudzoną.
15. Zwarcie udarowe.
Zwarcie udarowe jest to nagłe zwarcie zacisków twornika wzbudzonej maszyny. Można wyróżnić:
- zwarcie udarowe symetryczne - nagłe zwarcie równocześnie wszystkich trzech zacisków twornika
- zwarcie udarowe asymetryczne - nagłe, nierównoczesne zwarcie zacisków
W zależności od chwili zwarcia wyróżniamy:
- zwarcie udarowe symetryczne poprzeczne - oś poprzeczna wirnika „q” pokrywa się z osią rozpatrywanej fazy
- zwarcie udarowe symetryczne podłużne - oś podłużna wirnika „d” pokrywa się z osią rozpatrywanej fazy
- zwarcie udarowe symetryczne w dowolnej chwili
Prądu zwarciowe maszyn synchronicznych z biegunami jawnymi i utajonymi maja różne przebiegi. Spowodowane jest to różnicą przewodności magnetycznej w osi podłużnej i w osi poprzecznej.
1. Zasada działania, budowa.
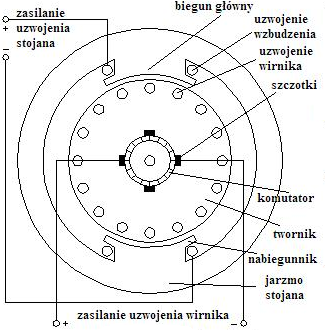
Jarzmo stajana spełnia funkcje obwodu magnetycznego oraz elementu konstrukcyjnego.
Stojan jest magneśnicą - wytwarzane jest w nim pole magnetyczne
Pole magnetyczne wytwarzane jest przez elektromagnes, którego uzwojenie umieszczone jest na biegunach głównych.
Wirnik jest najczęściej twornikiem w skład którego wchodzą: rdzeń, uzwojenie twornika oraz komutator.
Komutator służy do dostarczenia lub odbioru energii elektrycznej z wirnika. Jest elementem przełączającym poszczególne uzwojenia wirnika.
Zasada działania:
Przy pracy prądnicowej, jeżeli wirnik maszyny napędzimy z zewnątrz zasilając uzwojenie wzbudzenia ze źródła prądu stałego to w poszczególnych zwojach uzwojenia wirnika indukować się będą napięcia przemienne. Każdy zwój obracając się wraz z wirnikiem będzie znajdował się na przemian w polu północnego i południowego bieguna stojana. Niezależnie od położenia wirnika pod danym biegunem szczotka ma stały znak mimo ciągłej zmiany biegunowości napięcia w zwojach i zwrotu prądu. Maszyna prądu stałego może pracować również jako silnik.
Typy maszyn prądu stałego:
2. SEM i moment obrotowy.
Siła elektromotoryczna indukowana w uzwojeniu (niezależnie od rodzaju pracy):
gdzie: kn - stała maszyny. Jeżeli maszyna pracuje jako prądnica to jej prąd w uzwojeniach płynie w kierunku zgodnym z kierunkiem sem, moc oddawana jest dodatnia:
gdzie Rt - rezystancja obwodu twornika. Jeżeli maszyna pracuje jako silnik to prąd płynie w kierunku przeciwnym do sem:
. Siła elektromotoryczna indukowana w uzwojeniu twornika prądnicy jest równoważona przez spadek napięcia na odbiornikach i spadek napięcia na rezystancji obwodu twornika. W silniku natomiast napięcie doprowadzone jest równoważone przez spadek napięcia na rezystancji obwodu twornika i siłę elektromotoryczną często nazywaną przeciwelektromotoryczną.
Moment obrotowy:
jest to moment jaki działa na wirnik maszyny niezależnie od tego czy pracuje ona jako silnik czy prądnica. W silniku moment działa w kierunku zgodnym z kierunkiem wirowania wirnika, w prądnicy w kierunku przeciwnym.
3. Okład prądu, oddziaływanie (reakcja) twornika i jej kompensacja.
Okład prądu twornika:
, gdzie: z - liczba prętów uzwojenia, IA - prąd twornika, τp - podziałka biegunowa, p - liczba par biegunów. Wyrażenie „zIA” oznacza całkowity prąd płynący w całym obwodzie twornika, więc okład prądu oznacza prąd płynący w jednostce długości obwodu twornika. Okład prądu twornika wywołuje przepływ twornika ΘA. skierowany w osi szczotek.
Pole magnetyczne wytworzone przez magnes trwały lub elektromagnes nie jest jedynym polem wytworzonym w maszynie. Nazywa się je polem magnetycznym głównym. Obraz tego pola oraz rozkład indukcji przedstawia rys A). pod biegunami indukcja ma stałą wartość, w strefie neutralnej indukcja jest równa zeru. Rozkład taki występuje tylko przy pracy maszyny bez obciążenia. Jeżeli maszyna jest obciążona, w uzwojeniu wirnika płynie prąd i wytwarza się pole magnetyczne wokół tych uzwojeń rys B). z rysunku widać, że strumień twornika skierowany jest prostopadle do strumienia głównego. Strumień twornika nakłada się na strumień główny tworząc strumień wypadkowy. Zniekształcenie głównego pola magnetycznego przez pole magnetyczne twornika nazywa się oddziaływaniem twornika rys. C). wskutek oddziaływania twornika:
- zmienia się rozkład indukcji magnetycznej pod biegunami
- indukcja jest równa zeru nie w osi neutralnej maszyny, lecz w punkcie przesuniętym w stosunku do niej o pewien kąt.
- zmniejsza się wypadkowy strumień w maszynie nasyconej.
Aby przeciwdziałać skutkom przesunięcia osi neutralnej wykonuje się bieguny komutacyjne umieszczone pomiędzy biegunami głównymi. Działanie tych biegunów musi być proporcjonalne do prądu wirnika dlatego ich uzwojenia połączone są szeregowo z uzwojeniami wirnika. Bieguny komutacyjne nie likwidują zniekształceń pola magnetycznego pod biegunami głównymi. Aby zlikwidować działanie twornika w strefie biegunów głównych w nabiegunnikach biegunów głównych umieszcza się uzwojenie kompensujące połączone szeregowo z uzwojeniem twornika, przy czym kierunek prądu musi przeciwny do kierunku prądu twornika pod danym biegunem.
4. Komutacja, kompensacja SEM samoindukcji w zwoju komutatorowym, powodu iskrzenia i sposoby poprawy komutacji.
Komutacja jest to proces zmiany kierunku prądu w zezwoju i występujący przy tym zespół zjawisk mechanicznych, elektromagnetycznych, elektrochemicznych, termicznych. Zła komutacja wywołuje iskrzenie, które może być przyczyną zniszczenia szczotek i komutatora. Przyczyny iskrzenia szczotek:
- mechaniczne: nierówności, zanieczyszczenia powierzchni, złe przyleganie szczotek, drgania szczotek
- elektryczne: gęstość prądu na styku między szczotką a komutatorem
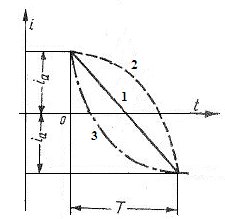
Podstawą do oceny komutacji jest krzywa komutacji przedstawiająca przebieg prądu w okresie komutacji. Najkorzystniejsza jest komutacji prostoliniowa (1), w czasie której zmiana prądu w zezwoju przebiega liniowo. Na początku komutacji prąd ma wartość Ia po komutacji - Ia czyli zmiana prądu wynosi 2Ia. Zmiana ta powoduje indukowanie się siły elektromotorycznej samoindukcji
. Siła ta dążąc do podtrzymania zwrotu prądu powoduje komutacje opóźnioną (2). Komutacja opóźniona cechuje się tym że w połowie okresu komutacji prąd jest większy od zera. Komutacja ta jest bardzo niekorzystna, gdyż może pociągnąć za sobą łuk elektryczny powodujący zwarcie komutatora. Ponieważ ciężko jest uzyskać komutacje liniową wobec tego aby zapobiec komutacji opóźnionej należy doprowadzić do komutacji przyspieszonej (3), czyli takiej przy której zmiana prądu w cewce nastąpi w pierwszej połowie okresu komutacji. Wartość jej powinna przewyższać wartość potrzebną do skompensowania SEM samoindukcji oraz dodatkowej SEM wywołanej oddziaływaniem twornika. W celu poprawy warunków komutacji stosuje szczotki o znacznej rezystancji przejścia.
5. Rodzaje uzwojeń tworników, warunki symetrii.
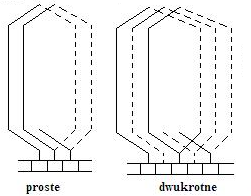
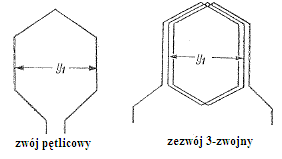
- uzwojenie pętlicowe:
Początek i koniec każdego zezwoju przyłącza się do dwu sąsiednich wycinków komutatora. Łączy się bezpośrednio w szereg ze sobą zwoje leżące obok siebie na obwodzie twornika.
W uzwojeniu pętlicowym liczba par gałęzi równoległych jest równa liczbie biegunów.
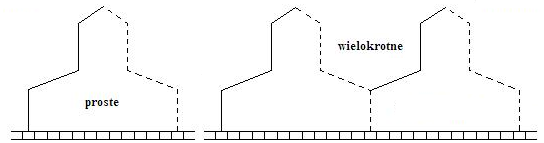
- uzwojenie faliste
Początek i koniec każdego zezwoju nie są połączone do sąsiednich wycinków komutatora lecz do wycinków znacznie odległych od siebie. Uzwojenie faliste proste ma zawsze dwie gałęzie równoległe, natomiast w wielokrotnym liczba gałęzi nie zależy od liczby biegunów
Każdy zezwój powinien mieć taką samą rozpiętość, aby dwa jego boki były obejmowane przez taki sam strumień magnetyczny. Rozpiętość powinna być równa podziałce biegunowej τ. Najczęściej rozpiętość zezwoju określa się jako poskok żłobkowy Y, który mierzy się liczbą odległości międzyżłobkowych, między dwoma bokami jednego zezwoju.
Aby maszyna prądu stałego mogła normalnie pracować między połączeniami równoległymi uzwojenia nie mogą płynąć żadne prądy wyrównawcze (w każdej chwili napięcia indukowane powinny być sobie równe). Uzwojenie musi spełniać warunki symetrii:
- w każdej gałęzi równoległej musi być taka sama liczba boków
- każdemu bokowi jednej gałęzi musi odpowiadać bok każdej innej gałęzi o takim samym indukowanym w nim napięciu przy takiej samej indukcji.
- odpowiednie boki wszystkich gałęzi równoległych powinny być rozmieszczone w jednakowych polach
Ponadto muszą być spełnione dodatkowe warunki mechaniczne, magnetyczne i elektryczne. Szczotki umieszcza się tak aby zwierały one zezwój wtedy kiedy nie indukuje się w nim napięcie - znajduje się w strefie neutralnej. Strefa neutralna jest to strefa między biegunami gdzie indukcja magnetyczna jest równa zeru.
6. Prądnica obcowzbudna, schemat i charakterystyki.
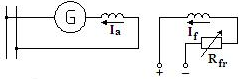
Prądnica obcowzbudna jest maszyną, w której obwód wzbudzenia zasilany jest z obcego źródła.
- charakterystyka biegu jałowego - zależność napięcia na zaciskach maszyny od prądu wzbudzenia w stanie jałowym przy stałej prędkości obrotowej. Er - napięcie remanentu jest to napięcie indukowane przez strumień pozostałości magnetycznej. Ma ono istotne znaczenie przy wzbudzaniu się prądnicy bocznikowe.
- charakterystyka obciążenia - zależność napięcia na zaciskach prądnicy od prądu wzbudzenia przy stałym prądzie twornika oraz znamionowej prędkości obrotowej.
- charakterystyka regulacji - zależność prądu wzbudzenia od prądu obciążenia
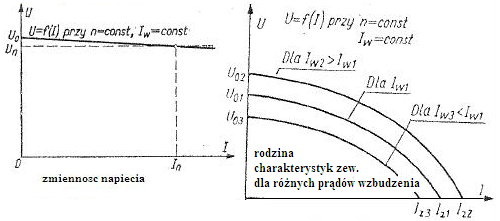
- charakterystyka zewnętrzna - zależność napięcia od prądu obciążenia przy znamionowej prędkości obrotowej i stałym prądzie twornika.
Zmienność napięcia jest to zmiana napięcia przy zmianie obciążenia od stanu jałowego do znamionowego:
7. Prądnica samowzbudna bocznikowa, schemat, proces samowzbudzenia i charakterystyki.
W prądnicy bocznikowej uzwojenie wzbudzenia jest połączone równolegle z uzwojeniem twornika
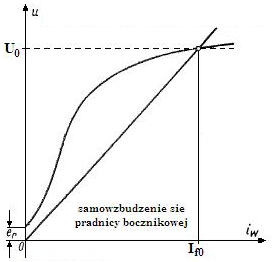
Proces samowzbudzenia. Jeżeli w obwodzie magnetycznym istnieje magnetyzm szczątkowy to po uruchomieniu maszyny w uzwojeniu twornika indukuje się napięcie remanentu. Wytwarza ono prąd w obwodzie twornika i uzwojeniu wzbudzenia. Jeżeli prąd w obwodzie wzbudzenia działa wzmacniająco na strumień remanentu to proces samowzbudzenia może się rozpocząć i maszyna wzbudzi się do pełnego napięcia. Przyczyny niedowzbudzenia prądnicy bocznikowej:
- brak magnetyzmu szczątkowego
- niewłaściwy kierunek wirowania
- niewłaściwe połączenie obw. wzbudzenia z obw. twornika
- przerwa w obwodzie twornika lub wzbudzenia
- zbyt duża rezystancja obwodu wzbudzenia
Charakterystyki jałowa i obciążenia analogiczne do prądnicy obcowzbudnej.
Charakterystyka zewnętrzna:
Zwarcie prądnicy obcowzbudnej nie jest niebezpieczne ponieważ prąd zwarcia jest mniejszy od znamionowego.
Prąd maksymalny jest 2-3 razy większy od znamionowego.
8. Prądnica szeregowo-bocznikowa, praca równoległa.
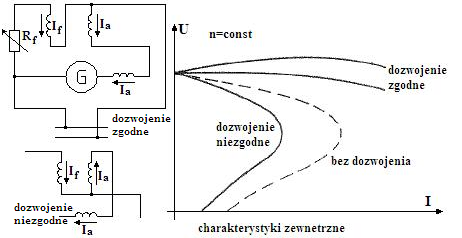
Prądnica szeregowo-bocznikowa na dwa uzwojenia: bocznikowe i szeregowe. Zaletą jest, że nie wymaga oddzielnego źródła zasilania dla obwodu wzbudzenia. Wadą natomiast silne zmniejszenie się napięcia przy wzroście obciążenia.
Decydujący wpływ na właściwości maszyny ma przepływ uzwojenia bocznikowego, który jest znacznie większy od przepływu uzwojenia szeregowego. Rozróżniamy maszyny z dozwojeniem zgodnym i niezgodnym.
Zmienność napięcia dla dozwojenia zgodnego jest równa zero lub ujemna. Dla dozwojenia jest duża.
Praca równoległa - przyłączenia prądnicy prądu stałego polega na uzgodnieniu biegunowości i wyrównaniu wartości napięć. Zadania podczas pracy sprowadzają się do regulacji napięcia i zmiany rozpływu mocy.
Przyłączenie prądnicy do pracującej już prądnicy polega na ustawieniu napięcia prądnicy biegnącej jałowo równej wartości napięcia sieci. Po przyłączeniu wzbudzonej prądnicy będzie ona dalej biegła jałowo. Aby przejęła ona część obciążenia należy stopniowo zwiększać jej wzbudzenie. Aby napięcie sieci pozostało stałe należy równocześnie zmniejszać wzbudzenia pierwszej prądnicy.
9. Silniki: bocznikowy, szeregowy i szeregowo-bocznikowy, schematy, charakterystyki robocze, rozruch i regulacja prędkości obrotowej.
- silnik bocznikowy:
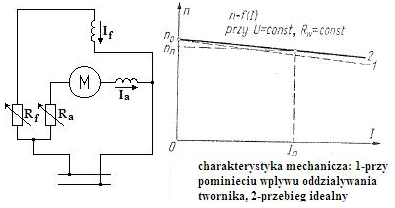
Rozruch silnika bocznikowego dokonuje się przy użyciu rozrusznika. Dodatkowy opornik powoduje zmniejszenie się prądu i momentu silnika. Aby moment zmniejszył się w określonych granicach podczas rozruchu włącza się kolejne sekcje rozrusznika przechodząc na kolejne charakterystyki aż do zwarcia rozrusznika.
Regulacja prędkości:
- włączenie dodatkowej rezystancji w obwód twornika - regulacja w dół
- zmiana strumienia - włączenie w szereg z obwodem wzbudzenia dodatkowej rezystancji - regulacja w górę
- zmiana napięcia zasilania twornika - regulacja od zera do większej od znamionowej
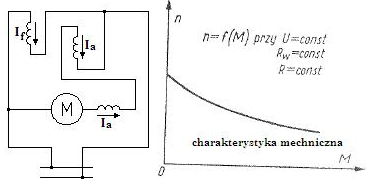
- silnik szeregowy:
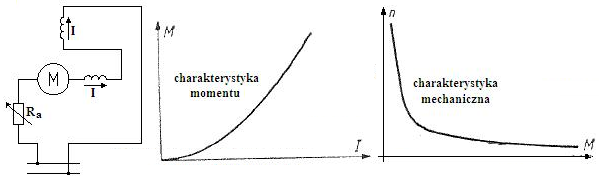
Uzwojenie wzbudzenia jest szeregowo połączone z uzwojeniem twornika. Prąd pobierany z sieci jest jednocześnie prądem twornika i wirnika.
Zaletą silnika jest wytwarzanie dużego momentu rozruchowego.
Wadą jest możliwość rozbiegania silnika. Przy małym obciążeniu prędkość obrotowa jest bardzo duża co prowadzi do uszkodzenia maszyny (rozbiegania).
Rozruch silnika szeregowy należy dokonywać tylko przy obciążeniu z wykorzystaniem rozrusznika wpiętego w obwód twornika powodującego stopniową regulacje prądu rozruchowego.
Regulacja prędkości:
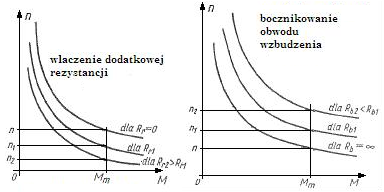
- włączenie dodatkowej rezystancji w obwód twornika - regulacja w dół.
- bocznikowanie obwodu wzbudzenia powoduje przy określonej wartości prądu obciążenia zmniejszenie strumienia i wzrost prędkości obrotowej.
- silnik szeregowo-bocznikowy:
Charakteryzuje się właściwościami zbliżonymi do silnika bocznikowego lub szeregowego w zależności od udziałów przepływów bocznikowego i szeregowego.
Rozruch silników przeprowadza się stosując rozrusznik rezystorowy. Stopniowe zwieranie rozrusznika umożliwia regulacje prądu rozruchowego.
Regulacje prędkości obrotowej realizujemy przez:
- zmianę napięcia zasilania twornika
- zmianę rezystancji w obwodzie twornika
- zmianę strumienia
10. Hamowanie maszynami prądu stałego.
- hamowanie prądnicowe ze zwrotem energii do sieci:
Maszyna może przejść w stan pracy hamulcowej gdy nadamy jej prędkość większą od prędkości przy idealnym biegu jałowym. Zakres prędkości można rozszerzyć w dół przez zwiększenie prądu wzbudzenia, lub przez zmianę rezystancji w obwodzie twornika.
- hamowanie przeciwwłączeniem:
Realizujemy przez napędzanie wirnika w kierunku przeciwnym do tego który występuje w danym układzie lub przez przełączenie obwodu twornika. Prądy w obwodzie twornika będą wtedy bardzo duże. Aby je ograniczyć włącza się rezystancje w obwód twornika.
- hamowanie dynamiczne:
Należy odłączyć obwód twornika od sieci i przyłączyć go do odpowiednio dopranego rezystora pozostawiając obwód wzbudzenia przyłączony do sieci. Im mniejsza jest rezystancja odbiornika tym większy jest prąd hamowania.
1. Pol magnetyczne ME - rodzaje, sposoby wytwarzania, rozkładanie, sumowanie, warunki powstawania pola wirującego kołowego, wyższe harmoniczne strefowe i czasowe.
- Pole stałe - oś nieruchoma, stały kierunek względem układu odniesienia, zwrot i wartość stałe. Można je wytworzyć przy pomocy magnesów trwałych lub elektromagnesów zasilanych prądem stałym (np. jeden zwój zasilony prądem stałym umieszczony w żłobkach nieruchomego wirnika cylindrycznego).
- Pole przemienne - oś nieruchoma, stały kierunek względem układu odniesienia, zwrot i wartość ulegają zmianom w czasie. Szczególnym przypadkiem jest pole pulsujące, które przy nieruchomej osi u zmiennej wartości zachowuje stały zwrot. Wytwarzamy zasilając uzwojenie maszyny prądem przemiennym o częstotliwości f.
- Pole wirujące - oś wiruje względem układu odniesienia, przy zachowaniu stałego zwrotu. Typowym przypadkiem jest pole wirujące kołowe o stałej wartości. Spotyka się również pola wirujące eliptycznie, w których wartość ulega zmianom przy zachowaniu stałego zwrotu wzdłuż wirującej osi. Wytwarzamy za pomocą wirującego elektromagnesu zasilanego prądem stałym. Jeżeli na obwodzie maszyny umieścimy m różnych cewek i zasilimy je dowolnymi co do fazy i wartości prądami o takiej samej częstotliwości to powstanie pole eliptyczne. Rzeczywisty kształt krzywej pola zależy od sposobu rozmieszczenia uzwojenia oraz od kształtu szczeliny.
Rozkładanie i sumowanie pól.
- Pole wirujące kołowe wytwarzamy przez zastosowanie uzwojenia trójfazowego zasilanego prądem trójfazowym. Można je uzyskać tylko wtedy, gdy zachowana jest zależność:
gdzie: αm - kąt między początkami dwóch sąsiednich zwojów uzwojenia, αe - kąt przesunięcia fazowego między prądami zasilającymi, p - liczba par biegunów. Kierunek wirowania pola zależy przy określonym rozmieszczeniu uzwojeń poszczególnych faz, od kolejności faz prądu. Prędkość wirowania pola zależy od częstotliwości prądu zasilającego oraz liczby par biegunów uzwojenia:
.
- sumowanie dwu pól kołowych wirujących z tą samą prędkością w tym samym kierunku daje wypadkowe pole kołowe wirujące z tą samą prędkością i w tym samym kierunku co pola składowe.
- sumowanie dwu pól o jednakowych amplitudach, wirujących z tą samą prędkością lecz w przeciwnych kierunkach daje pole przemienne o 2-krotnie większej amplitudzie pól składowych.
- sumowanie dwu pól wirujących w przeciwnych kierunkach z taką samą prędkością o różnych amplitudach tworzy pole wirujące eliptycznie. Szczególnym przypadkiem jest pole eliptyczne kołowe, które powstaje w przypadku zniknięcia jednego z pól składowych.
O właściwościach maszyny decyduje przede wszystkim pole podstawowej harmonicznej. Pola wyższych harmonicznych nie pozostają jednak bez wpływu na przebieg zjawisk i są na ogół przyczyna niepożądanych skutków: zniekształcenie krzywych napięcia czy powstawanie momentów pasożytniczych.
2. Uzwojenia maszyn bezkomutatorowych - rodzaje, podstawowe parametry, gwiazda żłobkowa, sporządzanie schematów.
Większość maszyn ma co najmniej dwa uzwojenia: jedno w stojanie, drugie w wirniku. Uzwojenie, w którym indukują się napięcia i prądy nazywamy uzwojeniem twornika. Uzwojenie które zasilamy prądem w celu wytworzenie pola magnetycznego nazywamy uzwojeniem wzbudzenia.
Podstawowym elementem każdego uzwojenia jest zwój składający się z dwu boków. Boki umieszczane są w żłobkach rdzenia i stanowią części czynne uzwojenia. Boki połączone są tzw. połączeniami czołowymi, które położone są poza rdzeniem. Nawijając szeregowo pewną liczbę zwojów tworzymy zezwój.
Charakterystyczną wielkością dla uzwojenia jest poskok y - jest to rozpiętość pomiędzy bokami zezwoju i określamy go w liczbie żłobków.
Podziałka biegunowa wyrażona w liczbie żłobków jest to odległość między osiami dwu sąsiednich różnoimiennych biegunów:
gdzie: Ż - całkowita liczba żłobków na obwodzie maszyny. Uzwojenie o poskoku równym podziałce biegunowej nazywamy uzwojeniem średnicowym, jeżeli poskok jest mniejszy od podziałki to uzwojenie nazywamy cięciwowym.
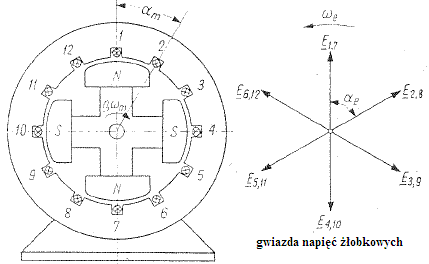
Gwiazda napięć żłobkowych są to wykresy wskazowe napięć indukowanych przez pole 1 harmonicznej w bokach umieszczonych w poszczególnych żłobkach.
Zasady sporządzania schematów:
- obliczenie kąta mechanicznego między sąsiednimi żłobkami:
- obliczenie kąta elektrycznego między wektorami gwiazdy napięć żłobkowych:
- obliczenie podziałki biegunowej:
- obliczenie liczby żłobków na biegun i fazę:
- wykreślenie gwiazdy napięć żłobkowych
3. Współczynnik uzwojenia (grupy i skrótu).
- Współczynnik skrótu jest to stosunek amplitudy napięcia indukującego się w zezwoju o poskoku cięciwowym do amplitudy napięcia jakie indukowało by się w tym zezwoju wykonanym jako średnicowy:
. Wartość współczynnika zależy od poskoku uzwojenia i od kształty fali pola. Dla przebiegów sinusoidalnych otrzymujemy:
gdzie:
jest to kąt pomiędzy napięciami indukującymi się w lewym i prawym boku zezwoju cięciwowego.
- Współczynnik grupy jest to stosunek amplitudy napięcia grupy rozłożonej do amplitudy napięcia, jakie wystąpiłoby w przypadku skupienia wszystkich zezwojów grupy w jednej parze żłobków o poskoku średnicowym:
. Wartość współczynnika zależy od liczby żłobków na biegun i fazę oraz od kształtu linii pola. Dla przebiegów sinusoidalnych współczynnik grupy określany jest stosunkiem geometrycznej sumy napięć w zezwojach do algebraicznej sumy tych napięć:
.
- Współczynnik uzwojenia jest to iloczyn współczynników skrótu i uzwojenia:
. Współczynnik ten jest niezbędny do wyznaczenia napięcia indukującego się w fazie uzwojenia:
. Odpowiedni dobór współczynnika uzwojenia pozwala ograniczyć wpływ wyższych harmonicznych w napięciu.
23
Wyszukiwarka
Podobne podstrony:
Maszyny Elektryczne - Pytania Z Egzaminów (2), Energetyka AGH, semestr 4, IV Semestr, Maszyny Elekt
Maszyny Elektryczne - Pytania Z Egzaminów (4), Energetyka AGH, semestr 4, IV Semestr, Maszyny Elekt
pytania i zadania z maszyn elektr. I egzamin poprawkowy
Pytania z maszyn elektrycznych egzamin 4 semestr
Maszyny Elektryczne Opracowanie Pytań Na Egzamin
elektro otwarte, Mechanika i Budowa Maszyn PWR MiBM, Semestr III, elektronika, Egzamin - pytania, op
Maszyny elektryczne pytania egzamin, POLITECHNIKA, maszyny elektryczne
Zagadnienia na egzamin maszyny elektr. II, Elektrotechnika - notatki, sprawozdania, Maszyny elektryc
Pytania z egzaminu z maszyn elektr. I, Elektrotechnika - notatki, sprawozdania, Maszyny elektryczne
Maszyny Elektryczne Pytania Problemowe Na Egzamin
Egzamin - Maszyny Elektr ZAGADNIENIA I, Maszyny elektryczne - wykład
Maszyny Elektryczne pytania z egzaminu 2007 poprawka (1)
maszyny, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, Maszyny elektryczne, zagadnienia na
Opracowanie pytań Egzamin Maszyny Elektryczne 2011, Maszyny elektryczne
Pytania na egzamin z maszyn elektrycznych
ROZPORZĄDZENIE maszyny, COŚ Z ELEKTRYKI-(egzaminy sepowskie)-do 1kv i i6 kv!!
Zagadnienia na egzamin z maszyn elektr. I
Maszyny Elektryczne pytania na egzamin 2007
Maszyny Elektryczne Pytania Z Egzaminów (0)
więcej podobnych podstron