OPIS SYSTEMU GPS
Wprowadzenie
Satelitarny system GPS (Global Positioning System) został zaprojektowany i skonstruowany w USA na zlecenie amerykańskiego Ministerstwa Obrony (DoD, Department of Defense) jako globalny wojskowy system nawigacyjny. Składa się z trzech segmentów:
satelitów
systemu kontrolnego
użytkowników
Segment satelitarny składa się obecnie z 24 satelitów umieszczonych po cztery na sześciu orbitach nachylonych względem równika pod kątem 55° równomiernie rozłożonych w długości geograficznej. Satelity GPS poruszają się po orbitach prawie kołowych na wysokości ok. 20200 km. Okres jednego obiegu takiego satelity wokół Ziemi wynosi ok. 12 godzin. Takie rozmieszczenie satelitów w przestrzeni zapewnia możliwość jednoczesnego obserwowania przynajmniej czterech satelitów GPS z dowolnego punktu na Ziemi. Każdy satelita systemu wysyła dwie fale nośne o częstotliwościach L1=1575.42 MHz L2=1227.60 MHz. Fala nośna L1 modulowana jest kodem C/A o częstotliwości 1.023 MHz. Na falę L1 nakładana jest dodatkowo depesza pozwalająca na przesyłanie wiadomości z satelitów do odbiornika zawierająca m. in. efemerydy pokładowe satelity parametry równania zegara satelity, współczynniki modelu jonosfery. Fale nośne L1 i L2 mogą być także modulowane precyzyjnym kodem P (Protected) o częstotliwości 10.23 MHz lub wymienione kodem Y, który jest zastrzeżony dla armii amerykańskiej. Częstotliwości nośne i modulujące kontrolowane są przez zegary atomowe, umieszczone na satelitach.
System kontrolny składa się z 5 stacji śledzących (Hawaii, Colorado Springs, Ascension, Diego Garcia, Kwajalen), rozmieszczonych dookoła kuli ziemskiej. System pełni następujące funkcje:
stacje śledzące, które rozmieszczone są w okolicy równika, przez cały czas wykonują obserwacje satelitów, celem określenia parametrów ich orbit, a także współczynników równania zegara. Wielkości te wyznaczane są na 12h do przodu dla każdej orbity. Ponadto stacje śledzące wyposażone są w najlepsze odbiorniki dwuczęstotliwościowe, którymi wykonują pionowe sondowanie atmosfery dla wyznaczenia poprawek troposferycznych,
trzy z pięciu stacji (Ascension,Diego Garcia, Kwajalen) wykonują transmisję danych do satelitów (efemerydy pokładowe, współczynniki równania zegara, itp.),
stacja Colorado Springs, jako stacja centralna, prowadzi opracowanie wyników obserwacji z pozostałych stacji śledzących, oblicza nowe efemerydy i współczynniki równania zegara. Stacja ta może kierować manewrami satelitów na orbitach.
Segment użytkowników skupia wszystkich użytkowników, zarówno cywilnych, jak i wojskowych, którzy używają różnego rodzaju odbiorniki, odbierające sygnały z satelitów, do wyznaczenia pozycji punktów w układzie geocentrycznym WGS-84.
Rodzaje obserwacji GPS
W systemie GPS mamy do czynienia z dwoma rodzajami obserwacji:
pseudoodległości,
fazy,
Pseudoodległość jest to odległość pomiędzy satelitą a odbiornikiem w momentach transmisji i odbioru sygnału. Czas przejścia sygnału jest wyznaczany poprzez porównanie identycznego jak satelity pseudoszumowego kodu (PRN) wytwarzanego przez odbiornik. Pseudoodległość może być określana zarówno z pomocą kodu C/A jak i kodu P. Poprawki ze względu na refrakcję fali w jonosferze i troposferze są określane wprost - przy pomocy odpowiednich formuł. Dokładność pomiaru pseudoodległości, która jest obarczona szczątkowym wpływem niesynchronizacji zegara satelity i odbiornika, wynosi ok. 3 m. przy wykorzystaniu kodu C/A i 30 cm przy zastosowaniu precyzyjnego kodu P.
Pomiary fazowe polegają na ciągłym zliczaniu przesunięcia fazy fali nośnej między falą generowaną przez odbiornik a falą wysyłaną przez satelitę, przesuniętą o efekt dopplerowski i odebraną przez odbiornik. Całkowita faza Φc składa się z części ułamkowej Fr(Φ), części całkowitej pełnych odłożeń Int(Φ) pomiędzy epoką rozpoczęcia zliczeń to a epoką pomiaru t oraz nieznanej ilości całkowitych odłożeń N w momencie rozpoczęcia pomiaru to. Podstawową trudnością w tym pomiarze jest określenie całkowitej ilości cykli fali gdyż dobrze mierzona jest część ułamkowa. Pomiar przesunięcia fazy fali nośnej daje przy wykorzystaniu częstotliwości L1 dokładność rzędu 2 mm.
Pomiary bezwzględne i względne
Tylko jeden odbiornik satelitarny GPS może wyznaczyć współrzędne stanowiska anteny w układzie, w którym podawane są orbity satelitów GPS (układ geocentryczny WGS 84) odniesione do początku układu, tj. do środka ciężkości Ziemi. Pomiary te są głównie wykorzystywane w nawigacji morskiej i lotniczej, ze względu na swoją niską dokładność rzędu 1-15m. Należy przy tym pamiętać, że metodami geodezji klasycznej wyznaczanie współrzędnych bezwzględnych (odniesionych do środka ciężkości Ziemi) było możliwe z dokładnością co najwyżej kilkuset metrów.
W przypadku pomiarów względnych potrzebne są przynajmniej dwa odbiorniki GPS. W tych metodach nie wyznacza się współrzędnych X, Y, Z stanowisk, lecz różnice współrzędnych ΔX, ΔY, ΔZ pomiędzy wszystkimi punktami satelitarnymi uczestniczącymi w pomiarze. Dokładność tych metod jest znacznie wyższa głównie ze względu na fakt, że wiele błędów, którymi są obarczone pomiary satelitarne w wyznaczaniu różnic eliminują się. Metody względne można podzielić na technologie pomiarów:
Technologie pomiarów względnych
Technologia pomiarów statycznych GPS
Technologia pomiarów statycznych GPS jest technologią najwyższej dokładności. Oba odbiorniki uczestniczące w pomiarze pozostają stacjonarne w ciągu całej sesji (kampanii) obserwacyjnej. Możliwe jest zbieranie obserwacji z wielu sesji obserwacyjnych (np. po kilka godzin dziennie), zaś zebrany materiał jest poddawany opracowaniu po zakończeniu całej kampanii obserwacyjnej. Długość sesji (kampanii) obserwacyjnej zależy głównie od żądanej dokładności (przeznaczenia sieci) i od odległości między punktami i - jak wynika z wieloletnich doświadczeń różnych ośrodków - wynosi:
30-90 min. dla sieci lokalnych
1-2 dni dla punktów odniesienia sieci krajowych i geodynamicznych o charakterze lokalnym i państwowym
4-6 dni dla sieci kontynentalnych i podstawowych sieci geodynamicznych regionalnych
Ogólne wytyczne dla obserwacji w reżimie statycznym są następujące:
minimalna liczba satelitów obserwowanych przez jedną stację ma wynosić 4,
minimalna wysokość każdego z satelitów nad horyzontem - 15°,
maksymalna wartość parametru PDOP, charakteryzującego rozkład satelitów w przestrzeni względem stacji obserwacyjnej - 15,
minimalny czas synchronicznych obserwacji dla wyznaczenia wektora lub kilku wektorów - 45 min
gdy dysponujemy odbiornikiem o jednej częstotliwości L1 , to odległości pomiędzy stacjami nie powinny przekraczać 30 km, głównie ze względu na wpływ refrakcji jonosferycznej.
Stosując efemerydy transmitowane przez satelity, tzw. efemerydy pokładowe , można spodziewać się, że wyniki wyznaczeń nie będą gorsze niż poniżej scharakteryzowane błędami średnimi:
±(0.01 + 0.002 s[km]) m dla wyznaczenia długości wektora,
±(1” + 5”/s[km]) dla wyznaczenia azymutu geodezyjnego i
±(0.02 + 0.002s[km]) m dla wyznaczenia wysokości elipsoidalnej.
Technologia pomiarów pseudo-statycznych GPS
Technologia pomiarów pseudo-statycznych należy do grupy metod pośrednich pomiędzy pomiarami statycznymi a kinematycznymi. Ta metoda polega na dwukrotnym pomiarze na każdym wyznaczanym punkcie , lecz nie wymagają ciągłej nieprzerwanej łączności z satelitami podczas transportu odbiornika z punktu na punkt. W pomiarze biorą udział przynajmniej dwa odbiorniki jeden ustawiony na punkcie odniesienia, drugi przemieszczający się z punktu na punkt. Pomiar na każdym punkcie trwa około 10-15 minut, wykonujemy pomiary na kolejnych punktach sieci, na ostatnim wyznaczanym punkcie czekamy 1-2 godzin na zmianę konfiguracji satelitów i ponownie wykonujemy pomiar GPS na punktach wyznaczanych.
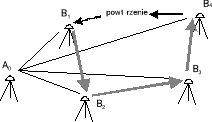
Istnieją trzy sposoby obserwacji pseudostatycznych. Jednym z nich jest sposób radialny. Polega na tym iż podczas, gdy jeden odbiornik pozostaje na pewnej stacji, rejestrując przez cały czas, pozostałe odbiorniki przemierzają dwukrotnie pozostałe punkty sieci wykonując za każdym postojem obserwacje trwające do 10 minut.
Rys.5 Sposób radialny obserwacji: z jednym ruchomym odbiornikiem.
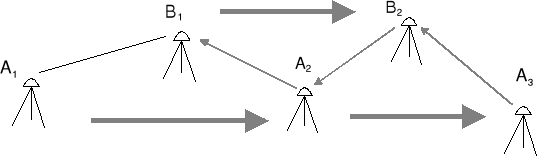
Drugim sposób nazywamy wektorowym. Polega na zmianach stacji obserwacyjnych przez obydwa odbiorniki. Po wykonaniu obserwacji około 10 -minutowych, obydwa odbiorniki włączone, lecz nie prowadzające rejestracji, przenosi się na inne punkty, dokonuje się rejestracji, itd. Po upływie około jednej godziny obydwa odbiorniki re-wizytują wcześniej zajmowane punkty i dokonują rejestracji.
Rys.6 Sposób wektorowy obserwacji: z dwoma poruszającymi się
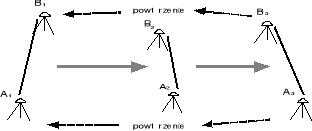
odbiornikami.
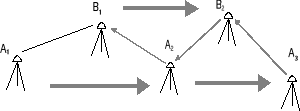
Trzeci sposób nazywamy poligonowym albo trawersowym. Jeden z odbiorników pozostaje nieruchomy na stacji, podczas gdy drugi przemieszcza się, zajmuje stanowisko, a następnie obydwa dokonują obserwacje. Potem przemieszcza się pierwszy odbiornik, aby zająć następną stację, po czym obydwa dokonują jednoczesnej obserwacji przez 2-10 minut. W czasie przemieszczeń odbiorniki pozostają włączone, lecz nie prowadzą rejestracji. Po upływie jednej godziny obydwa odbiorniki `przemierzają' raz jeszcze wszystkie stacje, pilnując poprzednio ustalonej kolejności. Każdy z odbiorników pozostaje więc na stacji przez 2 sesje obserwacyjne.
Rys.7 Sposób poligonowy obserwacji: z dwoma poruszającymi się
odbiornikami.
Pomimo że zaleca się nieco bardziej surowe reżimy dla obserwacji metodą pseudostatyczną w porównaniu do tych jakie mieliśmy dla metody statycznej, to wyniki uzyskiwane tą metodą okazują się nieco gorsze niż przytoczone powyżej.
Ogólne wytyczne dla obserwacji w reżimie pseudostatycznym są następujące:
minimalna liczba satelitów obserwowanych przez jedną stację ma wynosić 4, lecz zalecana 5,
minimalna wysokość każdego z satelitów nad horyzontem - 15°,
maksymalna wartość parametru PDOP, charakteryzującego rozkład satelitów w przestrzeni względem stacji obserwacyjnej - 5,
dwie sesje pomiarowe dla każdego obserwowanego wektora mają trwać 2-10 minut każda. Interwał czasu pomiędzy powtórzonymi pomiarami powinien wynosić 1 godz.
do pomiarów pseudostatycznych potrzeba, aby odbiornik był wyposażony w antenę kinematyczną.
W wyniku pomiarów metodą pseudostatyczną można się spodziewać, że błędy średnie nie przekroczą niżej podanych wartości, gdy będziemy stosować standardowe, firmowe programy obliczeniowe i firmowe zalecenia dotyczące procedury obserwacyjnej.
±(0.03 + 0.002 s[km]) m dla wyznaczenia długości wektora,
±(2” + 5”/s[km]) dla wyznaczenia azymutu geodezyjnego i
±(0.04 + 0.002s[km]) m dla wyznaczenia wysokości elipsoidalnej.
Technologie szybkie statyczne GPS
W pomiarze biorą udział, podobnie jak poprzednio, przynajmniej dwa odbiorniki GPS, jeden ustawiony na punkcie odniesienia, drugi przemieszczający się z punktu na punkt. Technologia wymaga jednokrotnego pomiaru na każdym wyznaczanym punkcie, nie wymaga nieprzerwanej ciągłości śledzenia satelitów w czasie transportu odbiornika z punktu na punkt. Istotą pomiaru jest szybkie wyznaczenie nieoznaczoności fazy przy wykorzystaniu kombinacji pomiarów kodowych i fazowych na obu częstotliwościach L1 i L2.
Ogólne wytyczne dla obserwacji szybkich statycznych są następujące:
wymagane są dwuczęstotliwościowe odbiorniki GPS z kodem precyzyjnym P,
zaleca się stosowanie interwału zliczeń w przedziale 5-15 sekund,
minimalna liczba satelitów obserwowanych przez jedną stację ma wynosić 4, lecz zalecana 6,
minimalna wysokość każdego z satelitów nad horyzontem - 20°,
czas pomiaru zależy od liczby obserwowanych satelitów, od jakości sygnałów satelitarnych oraz od długości mierzonego wektora i zawiera się w przedziale
5-20 minut,
gdy czas pomiaru był krótszy niż 10 minut, należy obserwacje wykonać powtórnie, najlepiej następnego dnia, w celu zwiększenia pewności poprawnego wyznaczenia,
długość mierzonego wektora nie powinna być większa niż 20 km
Szybkie pomiary statyczne pozwalają na skrócenie czasu gromadzenia sygnałów satelitarnych na stacji obserwacyjnej do kilku czy kilkunastu minut, przy czym wyniki takich wyznaczeń mają parametry dokładnościowe takie same lub niewiele niższe niż wyniki wyznaczeń statycznych
±(0.01 + 0.002 s[km]) m dla wyznaczenia długości wektora,
±(1” + 5”/s[km]) dla wyznaczenia azymutu geodezyjnego i
±(0.02 + 0.002s[km]) m dla wyznaczenia wysokości elipsoidalnej.
Technologia pomiarów kinematycznych GPS
Technologia ta jest typową technologią nawigacyjną. W pomiarze bierze udział jeden odbiornik stacjonarny, względem którego wyznaczana jest pozycja drugiego ruchomego odbiornika umieszczonego na obiekcie poruszającym się. Możliwe jest otrzymywanie pozycji obiektu ruchomego w czasie rzeczywistym (natychmiastowe, np. co 1 sekundę, co 5 sekund; będzie to tzw. „real time positioning”) albo też cały zebrany materiał obserwacyjny może być poddany opracowaniu po zakończeniu pomiarów („postprocesing”). Podczas całej sesji obserwacyjnej niezbędna jest ciągła łączność z obserwowanymi satelitami. Jeżeli pomiar ma być dokonywany metodą fazową to dla wyznaczenia nieoznaczoności fazy niezbędna jest inicjalizacja pomiaru. Znamy dzisiaj metody inicjalizacji statyczne i kinematyczne. Przed przystąpieniem do pomiaru kinematycznego inicjalizację metodą statyczną można wykonać jednym z trzech następujących sposobów:
inicjalizacja za pomocą krótkiego pomiaru statycznego, wykonywana przy pomocy dwóch odbiorników, przy czym jeden ustawiony jest na punkcje odniesienia, natomiast drugi w niewielkiej odległości (5 - 10m.) od odbiornika referencyjnego. Pomiar statyczny powinien trwać co najmniej 25 minut. Po zakończeniu pomiaru odbiornik referencyjny pozostaje na punkcje odniesienia a ruchomy odbiornik montuje się na ruchomym obiekcje stale zachowując łączność z obserwowanymi satelitami
inicjalizacja za pomocą pomiaru na znanej bazie, na punktach o znanych przyrostach współrzędnych, odległych od siebie o 5 -10m. Na jednym z nich, który jest punktem odniesienia, ustawiamy odbiornik stacjonarny a na drugim ustawiamy odbiornik ruchomy. Pomiar statyczny wykonujemy przez około 5 - 10 minut.
inicjalizacja metodą „antenna swap” na krótkiej, kilkumetrowej, nieznanej bazie. Oba odbiorniki wykonują pomiar statyczny przez około 5 minut, a następnie zamienia się w odbiornikach anteny i nadal obserwuje się około 5 minut.
Kinematyczna metoda inicjalizacji „On-the-fly” pozwala na wyznaczenie liczby N z obserwacji odbiornikiem ruchomym. Nie wymagane są tu pomiary statyczne przed rozpoczęciem pomiaru kinematycznego. Metoda ta polega na łącznym wykorzystaniu pomiarów kodowych i fazowych. Tylko nowsze typy odbiorników GPS mają zainstalowane wewnętrzne oprogramowanie pozwalające stosować tę metodę inicjalizacji.
Technologie pół-kinematyczne. Technologia „STOP&GO”
Technologia ta jest kombinacją technologii statycznych i kinematycznych. W pomiarze biorą udział przynajmniej dwa odbiorniki, jeden umieszczony na punkcie odniesienia, drugi przemieszczający się z punktu na punkt. Niezbędna jest inicjalizacja statyczna na początku pomiaru. Zaletą tej technologii jest to, że odbiornik ruchomy wykonuje pomiary na kolejnych punktach tylko przez 1 - 2 minuty. Jednak w ciągu całej sesji pomiarowej (w czasie pomiaru na punktach i nawet w czasie transportu z punktu na punkt ) niezbędna jest nieprzerwana łączność z przynajmniej 4 satelitami GPS. Jest to podstawowa wada tej technologii uniemożliwiająca jej zastosowanie w terenie o wysokiej zabudowie, w lesie itp. Pomiary wymagają stosowania odbiorników dostosowanych do pomiarów kinematycznych, gdyż śledzenie satelitów w czasie przemieszczania odbiornika odbywa się w kinematycznym trybie jego pracy. Instrukcje tej metody zawierają następujące wytyczne do pomiarów:
minimalna liczba śledzonych satelitów 4, lecz zaleca się śledzenie 5 satelitów,
minimalna wysokość satelitów ponad horyzontem ma wynosić 15°,
konfiguracja satelitów powinna być taka, aby liczba PDOP nie przekraczała 5,
na każdym punkcie, tzn. podczas pracy odbiornika nieruchomego na stanowisku należy zarejestrować 2-8 cykli pomiarowych,
zaleca się dwukrotny pomiar na każdym punkcie,
można wykonywać pomiary względne w odległości do 10 km od odbiornika stacjonarnego, gdy wykonuje się pomiary za pomocą jednej częstotliwości L1 i do20 km, gdy wykorzystujemy odbiorniki dwuczęstotliwościowe.
Można się spodziewać, że błędy średnie wyników pomiarów metodą stop-and-go nie przekroczą następujących wartości:
±(0.05 + 0.002 s[km]) m dla wyznaczenia długości wektora,
±(5” + 5”/s[km]) dla wyznaczenia azymutu geodezyjnego i
±(0.05 + 0.002s[km]) m dla wyznaczenia wysokości elipsoidalnej.
Technologia pomiarów różnicowych w czasie rzeczywistym (RTK)
Komplet pomiarowy składa się ze stacji bazowej, ze stacji ruchomej oraz z łącza radiowego z modemem. Ustawiona na znanym punkcie odniesienia stacja bazowa wykonuje przez cały czas pomiary bazowe satelitów GPS. Przetwarzając wyniki tych pomiarów, uwzględnia się stałe współrzędne stacji. W procesie tym w sposób ciągły, wyznacza się poprawkę korygującą obserwacje fazowe stacji bazowej do zadanej pozycji, którą określają geodezyjne współrzędne stacji w przyjętym układzie odniesienia. Stacja ruchoma (lub kilka stacji) prowadzi również ciągłe obserwacje fazowe tych samych satelitów. Na podstawie tych pomiarów oraz odebranych drogą radiową danych ze stacji bazowej, dotyczących obserwacji fazy fali nośnej oraz wspomnianej poprawki, wyznacza się pozycje stacji ruchomej względem stacji bazowej.
Ogólne wytyczne dla pomiarów różnicowych w czasie rzeczywistym (RTK) wynoszą:
wymagane są dwuczęstotliwościowe odbiorniki GPS
zaleca się stosowanie interwału w przedziale 5 - 15 sekund
minimalna liczba satelitów obserwowanych przez te same stacje ma wynosić 4
minimalna wysokość każdego z satelitów nad horyzontem - 20°
minimalny czas pomiaru wynosi 3 sekundy
długość mierzonego wektora nie powinna być większa niż 10 km
Wykorzystanie tej technologii jest ograniczone nie tylko poprzez zakłócenia w obiorze sygnałów satelitarnych ale też przez zakłócenia radiowej łączności pomiędzy stacją bazową i stacją ruchomą. W wyniku tych pomiarów błędy średnie wynoszą:
±(0.01 + 0.002 s[km]) m dla wyznaczenia współrzędnych horyzontalnych
±(0.02 + 0.002 s[km]) m dla wyznaczenia wysokości geometrycznej
Wyszukiwarka
Podobne podstrony:
Pytania zaliczenie odp, UWM Geodezja GiSzN, Geodezja satelitarna
satelitarna mini, UWM Geodezja GiSzN, Geodezja satelitarna
PROCES INWESTYCYJNY W BUDOWNICTWIE 2, geodezja, UWM Geodezja GiSzN
fiza egz pozostale, UWM Geodezja GiSzN, Fizyka
teoria-cw3-44-46, UWM Geodezja GiSzN, Fizyka
teoria-cw5-57, UWM Geodezja GiSzN, Fizyka
teoria-cw4-48, UWM Geodezja GiSzN, Fizyka
Ćw45, UWM Geodezja GiSzN, Fizyka
teoria-cw5, UWM Geodezja GiSzN, Fizyka
cwiczenie 40, UWM Geodezja GiSzN, Fizyka
Kolokwium gr 2, Geodezja i Geoinformatyka UWM, II rok, Geodezja Satelitarna, Opracowania do egzaminu
geodezja satelitarna skrypt 2 ppt
zagadnienia GeoSat, Geodezja i Kartografia, II rok, Geodezja Satelitarna
GPS Vector data(2), gik, semestr 4, satelitarna, Satka, Geodezja Satelitarna, Kozowy folder
sciaga satka 2 terminI, Geodezja, Geodezja Satelitarna, Materialy
GiNS Geodezja satelitarna sem 3
więcej podobnych podstron