|
AGH wydział EAIiE Elektrotechnika |
Imię Nazwisko: Adam Kiełtyka Konrad Przeźmiński Marcin Kącki Jacek Górka Łukasz Cisowski Sylwester Paterek Mateusz Mierzwa Krzysztof Brański Mateusz Siewierski |
|
Urządzanie i sieci elektroenergetyczne |
Rok: III gr : środa 11.00 |
||
Temat: Kompensacja mocy biernej |
|||
Data oddania:
|
Ocena:
|
||
Wstęp teoretyczny.
Dążenie do zapewnienia właściwej rentowności przedsiębiorstwa oraz wysokie ceny za energię elektryczną zmusiły odbiorców energii do ciągłej kontroli poziomu jej zużycia. Racjonalne gospodarowanie energią elektryczną wymaga również kontrolowania poziomu pobieranej mocy biernej. Jest to szczególnie istotne ze względu na fakt, że pobór mocy biernej można dość łatwo zoptymalizować i co najważniejsze odbywa się to bez ingerencji w ilość pracujących urządzeń i bez zmniejszania sumarycznego obciążenia przedsiębiorstwa pobieraną mocą czynną. Wykorzystując znane prawa fizyki i fakt, że większość instalowanych urządzeń pobiera moc bierną o charakterze indukcyjnym, można zredukować wartość poboru mocy biernej przez wprowadzenie do układu zasilania odbiorników o charakterze pojemnościowym. W ten sposób moc pobierana przez urządzenia indukcyjne jest kompensowana przez odbiory pojemnościowe. Ten sposób optymalizacji nazywany jest kompensacją mocy biernej. Optymalizacja kosztów to nie jedyny powód dla którego należy posiadać sprawny układ kompensacji. Skuteczna kompensacja eliminuje opłaty za moc bierną i zmniejsza o 3- 7% opłaty za moc czynną. Każda modernizacja, która przywróci sprawność systemu przyniesie wymierne korzyści finansowe. W naszym ćwiczeniu dokonaliśmy kompensacji mocy dla silnika indukcyjnego przy pomocy baterii kondensatorów.
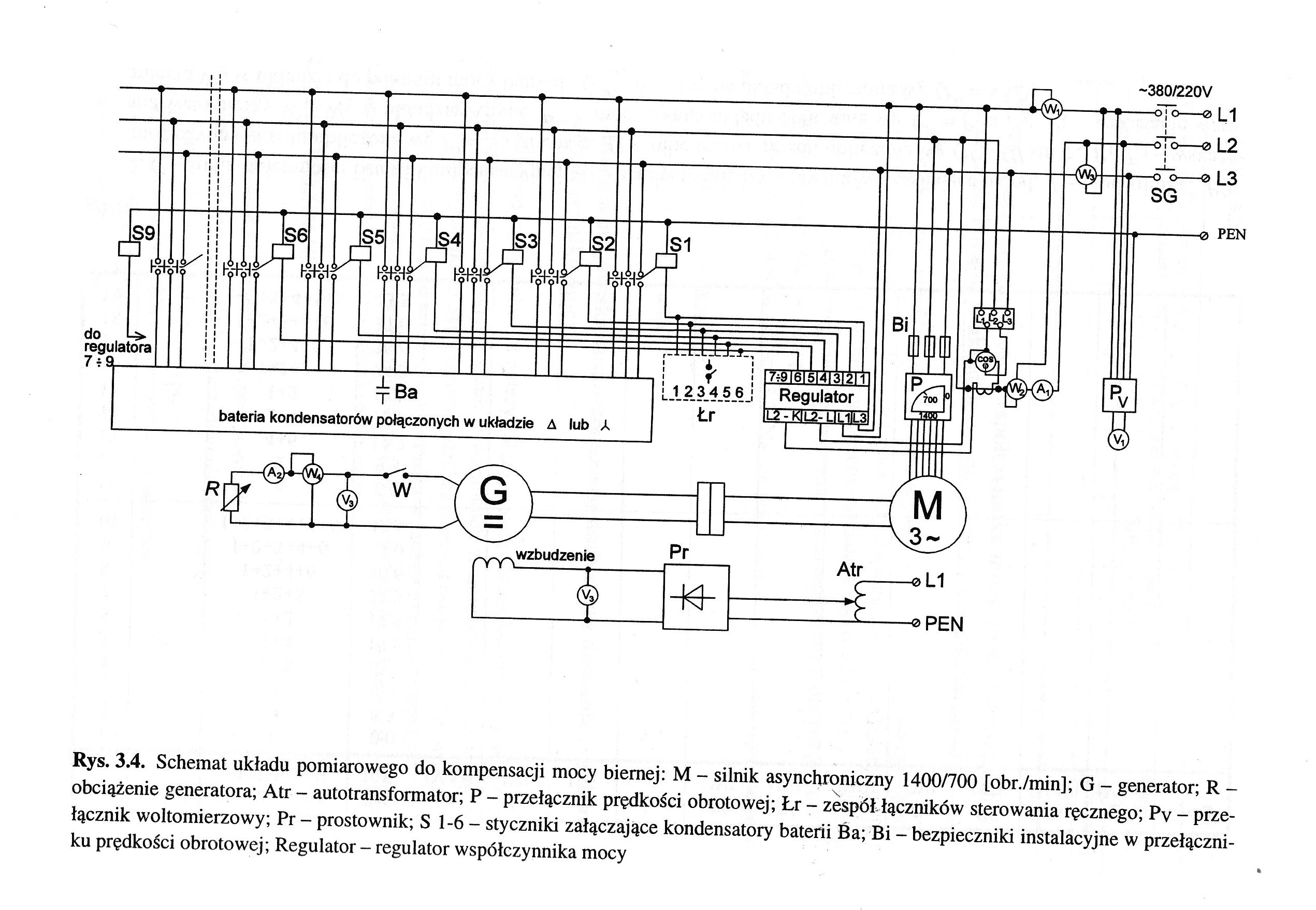
Schemat układu pomiarowego.
Pomiar współczynnika mocy silnika indukcyjnego w funkcji obciążenia dla prędkości obrotowej 1400 obr./min.
Pomiary przeprowadzono przy odłączonej baterii kondensatorów, regulując obciążenie silnika indukcyjnego pośrednio przez zmianę napięcia wzbudzenia generatora prądu stałego. Wyniki pomiarów przedstawiono w tabeli:
Itw[A] |
Uwzb[V] |
P1[W] |
P2[W] |
P[W] |
cos fi |
0 |
0 |
-280 |
660 |
380 |
0,4 |
2 |
15 |
-240 |
660 |
420 |
0,42 |
3 |
20 |
-200 |
660 |
460 |
0,44 |
4 |
22 |
-200 |
680 |
480 |
0,43 |
5 |
30 |
-180 |
740 |
560 |
0,46 |
6 |
38 |
-140 |
780 |
640 |
0,47 |
7 |
45 |
-100 |
820 |
720 |
0,51 |
8 |
50 |
-60 |
900 |
840 |
0,52 |
9 |
55 |
0 |
980 |
980 |
0,55 |
10 |
60 |
20 |
980 |
1000 |
0,59 |
11 |
65 |
80 |
1040 |
1120 |
0,61 |
12 |
70 |
200 |
1220 |
1420 |
0,65 |
13 |
80 |
280 |
1320 |
1600 |
0,68 |
14 |
90 |
400 |
1420 |
1820 |
0,71 |
15 |
95 |
500 |
1560 |
2060 |
0,73 |
Tabela 1. Pomiar współczynnika mocy.
Pomiar mocy przeprowadzono w układzie Arona gdzie: P=P1±P2 (od wartości prądu twornika 9A należało przełączyć watomierz W1
Wykres 1. Wykres zależności cosφ w funkcji obciążenia.
Zgodnie z poleceniem prowadzącego wybrano podpunkt w celu dobrania baterii kondensatorów dla połączenia w trójkąt i w gwiazdę.
Itw [A] |
Uwzb [V] |
P1 [W] |
P2 [W] |
P [W] |
cosφ |
5 |
30 |
-180 |
740 |
560 |
0,46 |
Założono, że cos ![]()
=0.96
więć: ![]()
=62,61, ![]()
=16,26
Moc baterii kondensatorów wyznaczamy ze wzoru:
Pojemność baterii kondensatorów dla połączeń w gwiazdę i trójkąt wynosi odpowiednio:
Wyznaczenie zależności współczynnika mocy, mocy biernej, mocy czynnej i prądu w układzie od mocy kompensacyjnej.
Dla wybranego obciążenia silnika zmieniano pojemności baterii kondensatorów przez załączanie kolejnych sekwencji, pomiary dokonano dla połączenia w gwiazdę i trójkąt. Wyniki przedstawiono w tabeli:
Lp. |
Układ |
C [μF] |
Q [Var] |
U [V] |
I [A] |
cos fi |
P' [W] |
Q'[Var] |
P1 [W] |
P2 [W] |
P'' [W] |
P3 [W] |
Q'' [Var] |
1 |
gwiazda |
0 |
0,0 |
380 |
2,6 |
0,43 |
424,8 |
892,0 |
-200 |
780 |
580 |
960 |
1662,8 |
2 |
gwiazda |
6,3 |
285,7 |
380 |
2,2 |
0,46 |
384,6 |
742,3 |
-100 |
680 |
580 |
800 |
1385,6 |
3 |
gwiazda |
9,3 |
421,7 |
380 |
2 |
0,49 |
372,4 |
662,5 |
-80 |
620 |
540 |
720 |
1247,1 |
4 |
gwiazda |
12,7 |
575,8 |
380 |
1,8 |
0,53 |
362,5 |
580,0 |
-20 |
580 |
560 |
640 |
1108,5 |
5 |
gwiazda |
15,6 |
707,3 |
380 |
1,6 |
0,56 |
340,5 |
503,7 |
0 |
540 |
540 |
560 |
969,9 |
6 |
gwiazda |
17,9 |
811,6 |
380 |
1,4 |
0,6 |
319,2 |
425,6 |
20 |
480 |
500 |
480 |
831,4 |
7 |
gwiazda |
24,3 |
1101,8 |
380 |
1,1 |
0,71 |
296,8 |
294,4 |
100 |
420 |
520 |
320 |
554,3 |
8 |
gwiazda |
30,6 |
1387,5 |
380 |
0,9 |
0,93 |
318,1 |
125,7 |
200 |
320 |
520 |
160 |
277,1 |
9 |
gwiazda |
37 |
1677,6 |
380 |
0,8 |
0,92 |
279,7 |
119,1 |
280 |
280 |
560 |
0 |
0,0 |
10 |
gwiazda |
43,5 |
1972,4 |
380 |
1 |
0,8 |
304,0 |
228,0 |
320 |
200 |
520 |
-80 |
-138,6 |
11 |
trójkąt |
6,3 |
857,0 |
380 |
1,3 |
0,58 |
286,5 |
402,4 |
0 |
500 |
500 |
440 |
762,1 |
12 |
trójkąt |
9,3 |
1265,0 |
380 |
0,9 |
0,83 |
283,9 |
190,8 |
140 |
360 |
500 |
240 |
415,7 |
13 |
trójkąt |
12,7 |
1727,5 |
380 |
0,9 |
0,89 |
287,5 |
147,3 |
280 |
240 |
520 |
0 |
0,0 |
14 |
trójkąt |
15,6 |
2122,0 |
380 |
1,3 |
0,65 |
308,8 |
361,0 |
400 |
100 |
500 |
-160 |
-277,1 |
15 |
trójkąt |
17,9 |
2434,8 |
380 |
1,6 |
0,52 |
316,2 |
519,3 |
520 |
0 |
520 |
-360 |
-623,5 |
16 |
trójkąt |
24,3 |
3305,4 |
380 |
3 |
0,45 |
513,0 |
1018,1 |
800 |
-260 |
540 |
-840 |
-1454,9 |
17 |
trójkąt |
30,6 |
4162,4 |
380 |
4,2 |
0,4 |
638,4 |
1462,8 |
1040 |
-500 |
540 |
-1360 |
-2355,6 |
18 |
trójkąt |
37 |
5032,9 |
380 |
5,6 |
0,3 |
638,4 |
2030,0 |
1320 |
-720 |
600 |
-1920 |
-3325,5 |
19 |
trójkąt |
43,5 |
5917,1 |
380 |
7 |
0,22 |
585,2 |
2594,8 |
1620 |
-1020 |
600 |
-2400 |
-4156,9 |
Tabela 2. Wyznaczenie parametrów obwodu w układzie od mocy kompensacyjnej.
Znaki minus w mocach oznacza iż zmienił się charakter mocy. Zgodnie z wyliczonymi we wcześniejszym punkcie wartościami pojemności baterii najmniejsze wartości mocy biernej nastąpiły dla pkt. 18,2 dla gwiazdy i 6,09 dla trójkąta co potwierdza słuszność wyliczenia teoretyczne. Dla dużo większych wartości pojemności baterii kondensatorów obserwujemy przekompensowanie, które także jest niekorzystne. Dlatego tak ważny jest odpowiedni dobór baterii kondensatorów dla danych obciążeń. Wartość prądu w zależności od mocy baterii przedstawia wykres:
Wykres 2. Zależność prądu od wartości mocy zainstalowanej baterii.
Wykres 3. Zależność współczynnika mocy od mocy baterii kompensacyjnej.
Jak widać charakterystyka dąży do 1 a następnie spada zmieniając charakter prądu. Moc czynna nie zależy od kompensacji dlatego nie powinna się zmienić po niej (Wykres 4) natomiast moc Q powinna maleć aż do przekompensowania gdzie powinna znowu wzrosnąć zmieniając swój charakter- wykres 5.
Wykres 4. Zależność mocy czynnej od mocy baterii kompensacyjnej.
Moc czynna zmienia się nie znacznie i jest ona spowodowana przez błąd pomiaru a nie przez zastosowanie kompensacji.
Wykres 5. Zależność mocy biernej w obwodzie od mocy baterii kondensatorów.
Jak łatwo zauważyć gdy Q''=Qc charakterystyki przechodzą przez zero i w obwodzie występuje tylko moc czynna.
Wyszukiwarka
Podobne podstrony:
Sprawko PSL, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), Podstaw
A-03 Komparator, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), Pod
2Filtry analogowe, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), T
sumator szeregowy projekt, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (mod
EA5, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), Elektromaszynow
kolokwium2-ts, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, Teoria i Przetwarzanie Syg
Licznniki, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), Podstawy
jh, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), Podstawy sterowa
FiltryAdaptacyjne sprawozdanie, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, Teoria i
substraktor jakis ale spoko, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (m
Liczniki1, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), Podstawy
filtracja adaptacyjna, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, Teoria i Przetwarz
3-fazowe silniki indukcyjne, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (m
FIRy, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, Teoria i Przetwarzanie Sygnałów, Ko
projekty-2011-2012, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C),
TC-S-04 Rejestry, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), Po
więcej podobnych podstron