Politechnika Lubelska |
Laboratorium Podstaw Energoelektroniki |
||||
w Lublinie |
|
||||
Nazwisko: Siwiec Bara Wolanin R*ża*ski |
Imię: Robert Maciej Mariusz Robert |
Semestr VI |
Grupa ED. 6.1 |
Rok akad. 1996/97 |
|
Temat ćwiczenia: Badanie prostownika sterowanego 1-fazowego. |
Data wykonania 3.03.97 |
Ocena
|
|||
1. Cel ćwiczenia.
Celem ćwiczenia było zapoznanie się z pracą i właściwościami prostownika 1-fazowego pełno okresowego w układzie półmostkowym z wyprowadzonym przewodem zerowym przy różnych rodzajach obciążenia.
2. Schemat układu pomiarowego.
A1,A3 - amperomierze EM. Pomiar prądu skutecznego diody i impedancji obciążenia.
A2,A4 - amperomierze ME.Pomiar wartości średniej prądu diody i impedancji obciążenia.
V1 -woltomierz ME .Pomiar wartości średniej napięcia.
V2 -woltomierz lampowy .Pomiar napięcia tętnień.
V3 -woltomierz EM. Pomiar wartości skutecznej napięcia wyprostowanego.
uklad ster. -układ do wytwarzania impulsów.
R - bocznik.
Z - impedancja obciążenia prostownika (charakter R,RL).
T1,T2 - tyrystory
Tr. - transformator.
oscyl. - oscyloskop.
3. Wykonanie ćwiczenia.
1. Prostownik sterowany z obciążeniem R.
a) Charakterystyka regulacyjna Uoα=f(α)
Tabela pomiarowa:
a |
b |
α |
λ |
Uoα |
Uα |
Utα |
t |
Uoα/U |
Id |
Iodα |
Iα |
Ioα |
mm |
mm |
st. |
st. |
V |
V |
V |
% |
- |
A |
A |
A |
A |
18 |
50 |
64,8 |
115,2 |
30 |
20 |
20,1 |
91 |
0,136 |
0,39 |
0,8 |
0,96 |
0,8 |
15 |
50 |
54 |
126 |
22,5 |
15 |
14,76 |
93 |
0,102 |
0,25 |
0,45 |
0,70 |
0,45 |
10 |
50 |
36 |
144 |
12,0 |
9 |
8,56 |
96 |
0,06 |
0,1 |
0,2 |
0,36 |
0,2 |
7 |
50 |
25,2 |
154,8 |
6,5 |
6 |
5,20 |
94 |
0,03 |
0,05 |
0,05 |
0,15 |
0,05 |
5 |
50 |
18 |
162 |
2,5 |
4 |
3,38 |
100 |
0,01 |
0 |
0 |
0,05 |
0 |
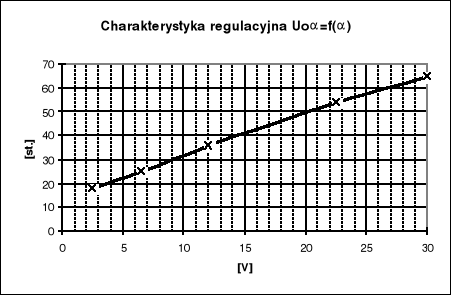
Rys. 1 Charakterystyka regulacyjna Uoα=f(α)
b) Charakterystyka zewnętrzna Uo=f(Io)
Tabela pomiarowa:
α=0° |
α≠0° |
||||
Io |
Uo |
Ut |
Io |
Uo |
Ut |
A |
V |
V |
A |
V |
V |
1,36 |
30 |
20 |
0,7 |
15,8 |
10,5 |
1,20 |
31 |
20,5 |
0,6 |
17 |
11,1 |
1,1 |
32 |
20,7 |
0,5 |
18 |
11,6 |
0,92 |
33 |
21,2 |
0,4 |
19,6 |
11,9 |
0,82 |
35 |
21,7 |
0,3 |
20,5 |
12,2 |
0,53 |
36 |
21,75 |
0,2 |
21 |
12,0 |
0,39 |
37 |
21,9 |
0,1 |
21 |
10,8 |
0,18 |
38 |
21,2 |
- |
- |
- |
0,1 |
37 |
19 |
- |
- |
- |
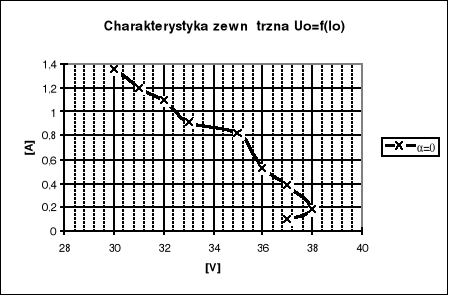
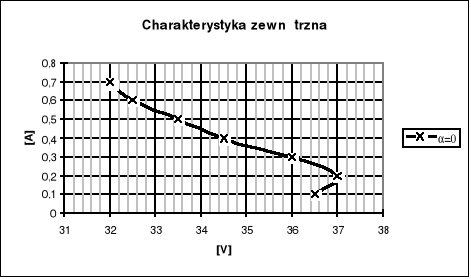
Rys. 2 Charakterystyka zewnętrzna Uo=f(Io) dla α=0
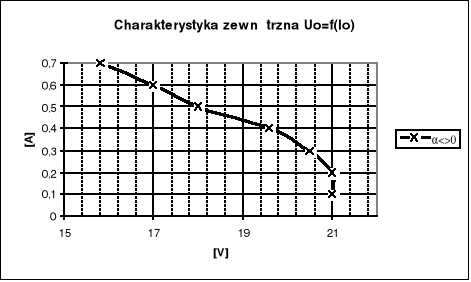
Rys. 3 Charakterystyka zewnętrzna dla α≠0
2. Prostownik sterowany z obciążeniem RL.
a) Charakterystyka sterowania Uoα/U=f(α) oraz zależność wsp. tętnień od kąta wysterowania t=f(α)
Tabela pomiarowa:
a |
b |
c |
α |
γ |
U0α |
Uα |
Utα |
t |
Uoα/U |
Id |
Iodα |
Iα |
Iα |
mm |
mm |
mm |
st, |
st, |
V |
V |
V |
% |
- |
A |
A |
A |
A |
15 |
50 |
4 |
54 |
14,4 |
31 |
16 |
15,19 |
90 |
0,141 |
0,3 |
0,55 |
0,54 |
0,78 |
14 |
50 |
4 |
50,4 |
14,4 |
25 |
12 |
11,67 |
85 |
0,114 |
0,2 |
0,35 |
0,39 |
0,55 |
11 |
50 |
4 |
39,6 |
14,4 |
16,5 |
8 |
7,25 |
74 |
0,075 |
0,1 |
0,15 |
0,21 |
0,29 |
6 |
50 |
4 |
21,6 |
14,4 |
8,5 |
4 |
3,8 |
62 |
0,039 |
0,02 |
0 |
0,05 |
0,07 |
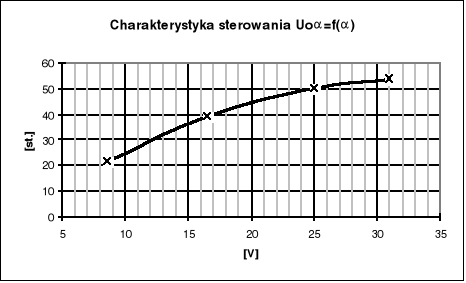
Rys. 4 Charakterystyka sterowania Uoα=f(α)
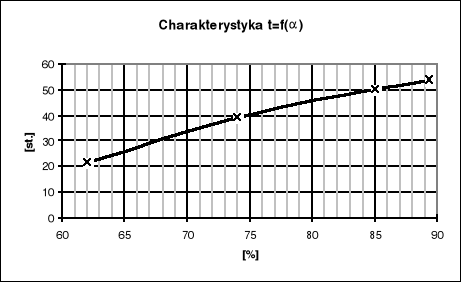
Rys. 5 Charakterystyka t=f(α)
Przykładowe obliczenia
*100%=*100%=0,74*100%=74%
b) Charakterystyka zewnętrzna Uo=f(Io)
Tabela pomiarowa:
α=0° |
α≠0° |
||||
Io |
Uo |
Ut |
Io |
Uo |
Ut |
A |
V |
V |
A |
V |
V |
0,76 |
32,5 |
15 |
0,41 |
21 |
9,2 |
0,7 |
32,0 |
16 |
0,35 |
21,5 |
10,3 |
0,6 |
32,5 |
17,1 |
0,3 |
22 |
11 |
0,5 |
33,5 |
18,5 |
0,25 |
22,5 |
11,9 |
0,4 |
34,5 |
19,6 |
0,2 |
23 |
12,5 |
0,3 |
36 |
20,4 |
0,15 |
23,5 |
12,9 |
0,2 |
37 |
20,6 |
0,1 |
23,5 |
12,5 |
0,1 |
36,5 |
18,6 |
0,05 |
23 |
9,5 |
Rys. 6 Charakterystyka zewnętrzna dla α=0
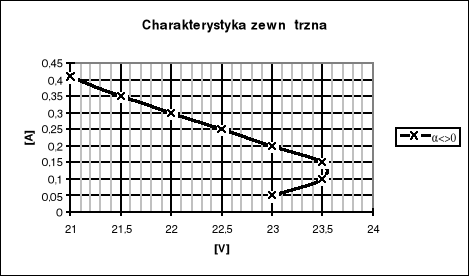
Rys. 7 Charakterystyka zewnętrzna dla α≠0
4. Wnioski.
Jak widać z powyższych charakterystyk, wraz ze wzrostem kąta sterowania rośnie wartość skuteczna prądu płynącego przez obciążenie. Wartość ta jest większa w przypadku obciążenia RL gdyż przy przejściu napięcia przez zero następuje rozproszenie na rezystancji energii zgromadzonej w indukcyjności. W efekcie kształt prądu obciążenia wygląda następująco:
W naszym przypadku zależności wspólczynnika tętnien od kąta α widzimy że wraz ze wzrostem kąta α wartośc t rośnie. W przypadku charakterystyki obciążenia wraz ze wzrostem prądu obciążenia spadek napięcia na impedancji Z maleje. Niedokładnośc wykonanych pomiarów spowodowana mogła być dużym błedem popełnianym w czasie odczytywania wartości mierzonych (wychylenie woltomierzy i amperomierzy byłow bardzo małe,najdokładniejsze wskazanie1/2-maksymalnego wychylenia) oraz tym.że zakres regulacji kąta sterowania nie zawierał się w pełnym zakresie od 0* do 180* Tak więc ilość pomiarów równierz została ograniczona.
Wyszukiwarka
Podobne podstrony:
MASZYN~8, PŚk, Maszyny elektryczne
MASZYN~8, PŚk, Maszyny elektryczne
MASZYN~8, PŚk, Maszyny elektryczne
MASZYN~8, PŚk, Maszyny elektryczne
MASZYN~8, PŚk, Maszyny elektryczne
MASZYN~8, PŚk, Maszyny elektryczne
MASZYN~8, PŚk, Maszyny elektryczne
MASZYN~8, PŚk, Maszyny elektryczne
MASZYN~8, PŚk, Maszyny elektryczne
MASZYN~8, PŚk, Maszyny elektryczne
MASZYN~8, PŚk, Maszyny elektryczne
MASZYN~8, PŚk, Maszyny elektryczne
MASZYN~8, PŚk, Maszyny elektryczne
MASZYN~8, PŚk, Maszyny elektryczne
MASZYN~8, PŚk, Maszyny elektryczne
MASZYN~8, PŚk, Maszyny elektryczne
więcej podobnych podstron