III MDT gr.61
Banaś Maciej
Bełz Łukasz
Choma Krzysztof
Ćwiek Stanisław
Sprawozdanie z podstaw automatyki.
Charakterystyki statyczne elementów automatyki.
Celem ćwiczenia jest zapoznanie się z pojęciem charakterystyki statycznej jako elementu opisu matematycznego obiektów i układów automatycznej regulacji, z eksperymentalnymi sposobami wyznaczania charakterystyk statycznych, metodami wyznaczania równania charakterystyki z wykresu lub na podstawie danych
tabelarycznych.
Charakterystyka statyczna przedstawia zależność wielkości wyjściowej od wielkości wejściowej w stanie ustalonym. Wartości ustalone wejścia i wyjścia oznaczamy przez xo i yo .
Jeżeli charakterystyka statyczna jest prostoliniowa jako opis kompletny własności obiektu lub układu wystarczy podać równanie różniczkowe operatorowe, które opisuje własności statyczne i dynamiczne w całym zakresie pracy.
Jeżeli charakterystyka statyczna jest krzywoliniowa niezbędna jest znajomość obu części opisu, wówczas stosuje się linearyzację. Polega ona na zastąpieniu krzywoliniowego odcinka charakterystyki odcinkiem prostoliniowym stycznym do rzeczywistej charakterystyki statycznej w wybranym punkcie.
W przybliżeniu można wtedy traktować charakterystykę statyczną jako prostoliniową a współczynniki równania różniczkowego jako stałe, ale tylko w otoczeniu danego punktu.
Eksperymentalne wyznaczenie charakterystyki statycznej:
siłownika pneumatycznego
zaworu hydraulicznego
Określenie analitycznych postaci tych charakterystyk przy pomocy wzorów interpolacyjnych Lagrange'a i metody najmniejszych kwadratów.
Linearyzacja i wyznaczenie charakterystyk statycznych wyżej wymienionych elementów z transmitancji operatorowych.
Tabela pomiarów i obliczeń: siłownika pneumatycznego
p |
wy |
L[mm] po aproksymacji |
||||
[atm] |
L[mm]↑ |
[V]↑ |
L[mm]↓ |
[V]↓ |
Lśre [mm] |
|
0,2 |
0 |
2,684 |
1,0001 |
2,804 |
0,5 |
0,5 |
0,3 |
1.6809 |
3,145 |
2,8282 |
3,331 |
2,25455 |
2,208 |
0,4 |
3,4056 |
3,618 |
4,3788 |
3,778 |
3,8922 |
3,982 |
0,5 |
5,3637 |
4,155 |
6,1375 |
4,285 |
5,7506 |
5,751 |
0,6 |
6,9972 |
4,603 |
7,8859 |
4,789 |
7,4416 |
7,442 |
0,7 |
8,5105 |
5,018 |
9,3497 |
5,211 |
8,9301 |
8,984 |
0,8 |
9,8997 |
5,399 |
10,6575 |
5,588 |
10,2786 |
10,305 |
0,9 |
11,2926 |
5,781 |
11,9722 |
5,967 |
11,6324 |
11,335 |
1,0 |
12 |
5,975 |
12 |
5,975 |
12 |
12 |
Równanie charakterystyki statycznej siłownika pneumatycznego uzyskane za pomocą wzoru Lagrange'a.
L= -11,938p3+14,0408p2+12,3292x-2,432
Równanie charakterystyki statycznej siłownika pneumatycznego uzyskane za pomocą metody najmniejszych kwadratów.
L=15,014p-2,0441
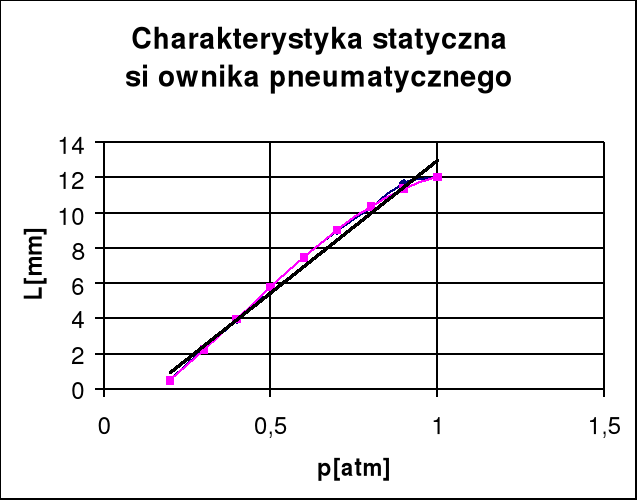
♦f(p)średnie uzyskane doświadczalnie ♦ L= -11,938p3+14,0408p2+12,3292x-2,432
♦ L=15,014p-2,0441
Tabela pomiarów i obliczeń: zaworu hydraulicznego
Ilość impulsów |
Q[l/min] ↑ |
Q[l/min] ↓ |
Qśre[l/min]
|
0 |
3,0 |
3,4 |
3,2 |
32 |
4,2 |
4,9 |
4,55 |
64 |
5,9 |
6,3 |
6,1 |
96 |
7,4 |
7,9 |
7,65 |
128 |
8,8 |
9,4 |
9,1 |
160 |
10,6 |
10,9 |
10,75 |
192 |
11,9 |
12,4 |
12,15 |
224 |
13,2 |
13,7 |
13,45 |
256 |
14,6 |
15 |
14,8 |
288 |
15,9 |
16 |
15,95 |
320 |
16,9 |
16,6 |
16,75 |
352 |
17,9 |
18,1 |
18 |
384 |
18,0 |
19 |
18,5 |
416 |
19,7 |
19,9 |
19,8 |
448 |
20,5 |
20,5 |
20,5 |
Równanie charakterystyki statycznej zaworu pneumatycznego uzyskane za pomocą metody najmniejszych kwadratów.
Q=-0,00003Imp2+0,0546Imp+2,6424
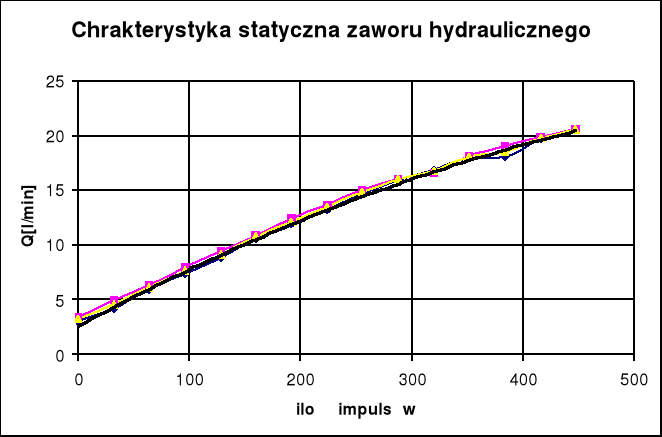
Wykres zależności wydatku przepływu od ilości impulsów:
♦przy rosnących impulsach
♦przy malejących impulsach
♦uśrednione wyniki doświadczalne
♦ Q=-0,00003Imp2+0,0546Imp+2,6424
Imp- ilość impulsów sygnał wejściowy
Wnioski
Siłownik pneumatyczny wykazuje charakterystykę liniową zarówno przy wzroście jak i spadku ciśnienia. Współczynniki przy zmiennej x są stosunkowo podobne, można więc przyjąć, że linie te są równolegle przesunięte względem siebie. Wraz ze wzrostem ciśnienia wzrasta również napięcie i odwrotnie przy jego spadku.
Zawór hydrauliczny wykazuje natomiast charakterystykę krzywoliniową lecz w początkowej fazie pomiarów (do pewnej ilości impulsów), charakterystyka ta rośnie liniowo, natomiast w późniejszej fazie rośnie już wolniej, aż do momentu, w którym osiągnie stan ustalony. Krzywą otrzymaną jako charakterystykę zaworu należy aproksymować wielomianem drugiego stopnia, gdyż aproksymacja ta jest wtedy najbardziej optymalna. Dla zaworu również można przyjąć, że krzywe charakterystyk są przesunięte względem siebie o pewną wartość.
2
Wyszukiwarka
Podobne podstrony:
literatura staropolska, Miko-aj Rej 1505, Mikołaj Rej 1505 - 1569
1569
1998 07 17 1569
1569
Rzeczpospolita w 1569 r
Światło rozjaśniło sie Kolęda z Kancjonału Walentego z Brzozowa 1569 Na 1 głos
Mercy and Liberality The Aftermath of the 1569 Northern Rebellion
Lindsay Armstrong Dark Captor [HP 1569, MB 3503] (v0 9) (docx) 2
Fourquevaux 1569
Unia lubelska 1569
więcej podobnych podstron