Badanie 3-fazowego silnika indukcyjnego pierścieniowego
1. Czynności wstępne
Przed przystąpieniem do pomiarów należy zapoznać się z budową stanowiska oraz danymi znamionowymi badanej maszyny pierścieniowej oraz hamowni. Ustalić na podstawie tabliczki znamionowej wartości napięcia znamionowego, prądu znamionowego maszyny i jej uzwojeń oraz znamionową prędkość wirowania.
2. Wyznaczanie parametrów schematu zastępczego sprowadzonego do napięcia na uzwojeniu fazy stojana (pomiary rezystancji uzwojeń, bieg jałowy i próba zwarcia).
Wyznaczane są wartości parametrów schematu zastępczego silnika o następującej postaci:

Pomiar rezystancji uzwojeń Rs oraz Rw
Stosuje się metodę techniczna lub metody mostkowe. Należy zwrócić uwagę na to by podczas pomiaru rezystancji uzwojenia wirnika nie mierzyć jej łącznie z rezystancją przejścia na zestyku ślizgowym. Można to uzyskać mierząc wartość napięcia bezpośrednio na pierścieniach ślizgowych. Powyższe wymaganie jest podyktowane dużą zmiennością rezystancji przejścia w funkcji prądu płynącego przez zestyk oraz prędkości wirowania pierścieni ślizgowych względem szczotek, przy czym rezystancja przejścia maleje wraz ze wzrostem prędkości oraz wzrostem wartości płynącego prądu. Pomiar rezystancji wirnika wykonuje się w następującym układzie pomiarowym:
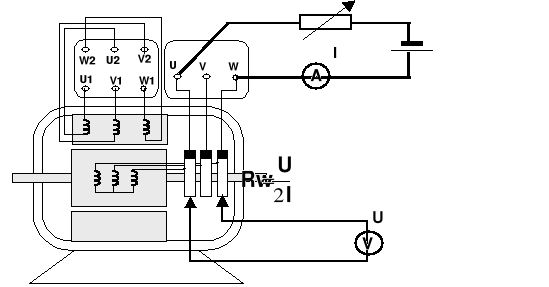
Podczas zapisywania wyników wyraźnie zaznaczać jaką rezystancję (między zaciskową czy pojedynczej fazy uzwojenia) wyznaczano.
Zmierzone przy pomocy prądu stałego rezystancje pojedynczych faz stojana i wirnika będą oznaczane jako Rs oraz Rw.
Wyznaczenie przekładni międzyuzwojeniowej silnika
Przekładnię międzyuzwojeniową silnika wyznacza się na podstawie pomiarów napięć zasilania stojana Us oraz indukowanego w uzwojeniach wirnika Uw przy nieruchomym wirniku. Pomiary wykonuje się w następującym układzie połączeń:
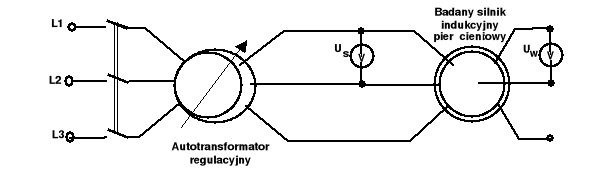
Próba powinna być wykonana przy napięciu dla którego nie występuje nasycenie obwodu magnetycznego silnika, co występuje przy napięciu obniżonym w porównaniu ze znamionowym. Można wykonać pomiary dla kilku coraz mniejszych wartości napięcia i zastosować regresję liniową w celu wyznaczenia przekładni dla dążącego do zera napięcia zasilania. Po wykonaniu pomiarów należy uwzględniając układy połączeń uzwojeń stojana i wirnika obliczyć wartości napięć na pojedynczych fazach uzwojeń.
Jako najbardziej zbliżoną do rzeczywistej wartości przekładni międzyuzwojeniowej silnika przyjmuje się najmniejszą z uzyskanych z obliczeń wartość ![]()
.
Próba stanu zwarcia pomiarowego
Próbę wykonuje się w wyznaczenia parametrów podłużnych schematu zastępczego, a także w celu wyznaczenia krotności początkowej wartości prądu rozruchowego oraz przybliżonej wartości początkowej momentu rozruchowego silnika.
Badanie przeprowadza się w następującym układzie pomiarowym:
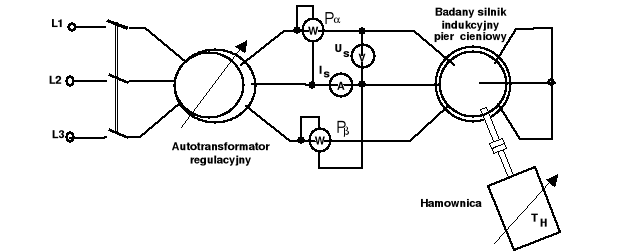
Podczas obliczeń parametrów schematu zastępczego stosuje się wielkości napięcia i prądu w uzwojeniu pojedynczej fazy stojana. Wymaga to przeliczenia zmierzonych wartości napięcia i prądu silnika uwzględniającego sposób połączenia uzwojenia stojana.
Podział rezystancji zwarcia na rezystancję stojana i sprowadzoną rezystancję wirnika wymaga uwzględnienia szeregu zjawisk prowadzących do wystąpienia różnych wartości rezystancji zwarcia wynikającej z próby zwarcia w porównaniu z wartością uzyskaną z sumowania rezystancji stojana i sprowadzonej rezystancji wirnika uzyskanych z pomiarów przy pomocy prądu stałego. Powodem tego zjawiska mogą być różne temperatury uzwojeń podczas pomiarów oraz zwiększanie rezystancji uzwojeń wywoływane w trakcie przepływu przez nie prądu zmiennego związane z występowaniem prądów wirowych. Rozdziału rezystancji zwarcia dokonuje się dzieląc wartość rezystancji zwarcia wyznaczoną z próby zwarcia proporcjonalnie do rezystancji uzwojeń wyznaczonych przy pomocy prądu stałego.
![]()
![]()
gdzie:
![]()
oraz ![]()
.
Podział reaktancji zwarcia na reaktancję rozproszenia stojana oraz sprowadzoną reaktancję wirnika jest procesem, który wymaga szczegółowych badań maszyny. W przybliżonych obliczeniach można założyć, że obydwie reaktancje mają równe wartości i przypisać im wartości równe połowie reaktancji zwarcia.
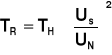
Zmierzony podczas próby moment hamujący może posłużyć do wyznaczenia przybliżonej wartości początkowej momentu rozruchowego. Do jej wyznaczenia można wykorzystać znaną z teorii przybliżoną proporcjonalność momentu elektromagnetycznego dla określonej prędkości wirowania do kwadratu napięcia zasilania. Tak więc:
Próba stanu jałowego
W warunkach laboratoryjnych wykonuje się próbę idealnego biegu jałowego. Próba te różni się od rzeczywistego biegu jałowego tym, że straty mechaniczne silnika pokrywane są z odrębnego źródła napędowego, którym w trakcie ćwiczenia jest hamownia. Próbę wykonuje się przy napięciu zasilania równym napięciu znamionowemu stosując układ połączeń taki jak w trakcie próby zwarcia.
Na podstawie pomiarów wyznacza się:
E0 - siła elektromotoryczna stojana w stanie jałowym wyznaczona z napięcia Uuzw_s przez wektorowe pomniejszenie go o spadki napięcia na R1 oraz Xr1 wywołane przepływem prądu stanu jałowego pojedynczej fazy uzwojenia stojana Iuzw_s o indukcyjnym kącie fazowym wynikającym z cosj0.
DPCu0 - straty w uzwojeniach stojana wywołane przepływem prądów stanu jałowego pojedynczych faz uzwojeń stojana Iuzw_s przez rezystancje R1.
DPFe - straty w żelazie stojana wynikające z odjęcia od mocy biegu jałowego P0 strat w uzwojeniach stojana DPCu0.
RFe - zastępcza rezystancja strat w żelazie wyznaczona z siły elektromotorycznej E0 oraz składowej czynnej prądu stanu jałowego pojedynczej fazy stojana Iuzw_s·cos j0
Xm - reaktancja główna schematu zastępczego wyznaczona z siły elektromotorycznej E0 oraz składowej magnesującej prądu stanu jałowego pojedynczej fazy stojana Iuzw_s·sin j0
3. Próba obciążenia
Próba polega na wyznaczeniu charakterystyk określających właściwości silnika w stanie obciążenia podczas pracy w warunkach znamionowego zasilania. Uzwojenie wirnika w trakcie próby jest zwarte. Silnik bada się w układzie jak przy próbie zwarcia obciążając go przy pomocy hamowni. Pomiary wykonuje się zmieniając wartość momentu hamującego od zera do wartości wywołującej w stojanie znamionową wartość prądu. Na podstawie pomiarów i obliczeń wyznacza się:
n= f(TH), Pel; Pm=f(TH), h=f(TH), Is=f(TH), cosj=f(TH).
4. Wyznaczanie charakterystyk T=f(n) przy obniżonym napięciu i różnych wartościach rezystancji w obwodzie wirnika.
Badania wykonuje się uzupełniając poprzedni układ dodatkową rezystancją w obwodzie wirnika.
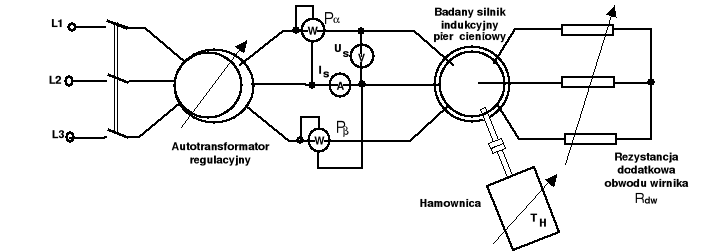
Napięcie zasilania obniża się tak, by podczas wirowania wirnika z prędkością około 0,5 prędkości synchronicznej w kierunku przeciwnym do kierunku wirowania pola, wartość prądu stojana nie przekraczała wartości znamionowej. Zmieniając wartość wytwarzanego momentu przez hamownię, wymusza się pracę maszyny badanej z prędkością zmieniającą się od -0,5 prędkości synchronicznej przez zero (wykonując pomiary dla prędkości 0(+) oraz 0(-)) do +1,5 prędkości synchronicznej. Wymusza się w ten sposób trzy podstawowe stany pracy maszyny: pracę hamulcową (przeciw włączenie), pracę silnikową oraz pracę generatorową (hamowanie z odzyskiem energii). Dla powyższych stanów pracy należy obserwować wskazania watomierzy i uświadamiać sobie kierunek przepływu energii mechanicznej. Zwrócić uwagę na sposób bilansowania się energii w trakcie różnych stanów pracy. Dokonuje się pomiarów:
L.p. |
Us |
Is |
n |
TH |
Uwaga. Tabela wykorzystywana dwukrotnie dla obydwu cykli pomiarowych
I cykl pomiarów dla Rdw=0
II cykl pomiarów dla
Rdw= . . . . .
|
|
V |
A |
obr/min |
kGm |
|
1 |
|
|
-0,5·ns |
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
0(-) |
|
|
|
|
|
0(+) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
nk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ns |
|
|
18 |
|
|
|
|
|
19 |
|
|
|
|
|
20 |
|
|
1,5·ns |
|
|
Uzyskane wyniki pomiarów przelicza się na napięcie znamionowe zakładając, że wartość prądu dla konkretnej prędkości wirowania jest proporcjonalna do napięcia oraz wartość momentu elektromagnetycznego silnika jest proporcjonalna przy danej prędkości wirowania do kwadratu napięcia. Wartość momentu elektromagnetycznego silnika wyznacza się korygując zmierzony moment hamowni o wartość momentu strat mechanicznych dodając go do momentu hamowni dla prędkości wirowania w kierunku zgodnym z wirowaniem pola i odejmując go dla prędkości wirowania w kierunku przeciwnym. Wartość momentu strat mechanicznych wyznacza się jako ½ skoku wartości momentu przy zmianie prędkości wirowania z 0(-) na 0(+). Przeliczoną na znamionowe napięcie wartość momentu elektromagnetycznego można skorygować taką samą wartością momentu strat mechanicznych (nie zależy on od napięcia) uzyskując przybliżone wartości momentów maszyny dla napięcia znamionowego. Wyniki obliczeń zestawia się w następującej tabeli:
L.p. |
Is(UN) |
Tem |
Tem(UN) |
T(UN) |
Uwaga. Tabela wykorzystywana dwukrotnie dla obydwu cykli pomiarowych
I cykl pomiarów dla Rdw=0
II cykl pomiarów dla
Rdw= . . . . .
Moment strat mechanicznych
TDPm= . . . . .
|
|
A |
Nm |
Nm |
Nm |
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
18 |
|
|
|
|
|
19 |
|
|
|
|
|
20 |
|
|
|
|
|
5. Wyznaczanie wykresu fazorowego na podstawie schematu zastępczego
Wykreśla się w skali wykres fazorowy dla podanych przez prowadzącego wartości mocy na wale oraz poślizgu.
W trakcie opracowywania tego punktu należy na podstawie podanych parametrów wyjściowych silnika określić wartości prądów, spadków napięć i w rezultacie wartość napięcia zasilania silnika. Podczas wyznaczania wartości niektórych wielkości można zastosować metodę graficzną. Na podstawie przeprowadzonych obliczeń określić czy w rozpatrywanym stanie pracy silnik znajduje się w stanie przeciążenia czy pracuje w granicach obciążeń dopuszczalnych.
Sugerowaną kolejność obliczeń oraz rysowania wykresu fazorowego przedstawiono na schemacie zastępczym poniżej.
Wyszukiwarka
Podobne podstrony:
11 Silnik indukcyjny pierścieniowy SUHf, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne.
11 Silnik indukcyjny pierścieniowy SUHf, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne.
Badanie transformatora trójfazowego - z, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne.
Badanie transformatora trójfazowego - i, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne.
moje synchro wisni, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne. Laboratorium, 08.Bad
Badanie transformatora trójfazowego - a, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne.
silnik obcowzbudnym, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne. Laboratorium, 09.Ba
Badanie maszyny synchronicznej e, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne. Labora
Transformator jednofazowy, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne. Laboratorium,
Badanie silnika indukcyjnego - l, Polibuda, IV semestr, SEM IV, Maszyny Elektryczne. Laboratorium, 0
Badanie maszyny synchronicznej b, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne. Labora
moje synch, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne. Laboratorium, 08.Badanie 3-f
Badanie 3-fazowego silnika klatkowego, Polibuda, IV semestr, SEM IV, Maszyny Elektryczne. Laboratori
Badanie przebiegu czasowego e, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne. Laborator
Badanie przebiegu czasowego a, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne. Laborator
Badanie 3-fazowego silnika komutatorowego typu Schrage - f, Polibuda, IV semestr, SEM IV, Maszyny El
Badanie przebiegu czasowego b, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne. Laborator
więcej podobnych podstron