Gdańsk, 05.01.2012r.
Filtry cyfrowe na egzamin zerowy z Przetwarzania Sygnałów 2012
Sylwia Antosik 133442
Ewelina Wielemborek
IBM 3
Spis treści
Filtr Swiss Army Knife…………………………………………………………………………………………………………………………………….3
Twierdzenia i definicje wykorzystywane w projekcie…………………………………………………………………………………….4
Filtr średniej ruchomej…………………………………………………………………………………………………………………………………..5
Filtr różnicujący……………………………………………………………………………………………………………………………………………..8
Leaky Integrator……………………………………………………………………………………………………………………………………………11
Realizacja w Matlabie…………………………………………………………………………………………………………………………………..14
LITERATURA:
Materiały projektowe „SWISS ARMY KNIFE”
Treści wykładów “Cyfrowe Przetwarzanie Sygnałów” - prof. dr hab. inż. Ewa Hermanowicz
Skrypt ” Cyfrowe Przetwarzanie Sygnałów” - dr inż. Andrzej Leśnicki
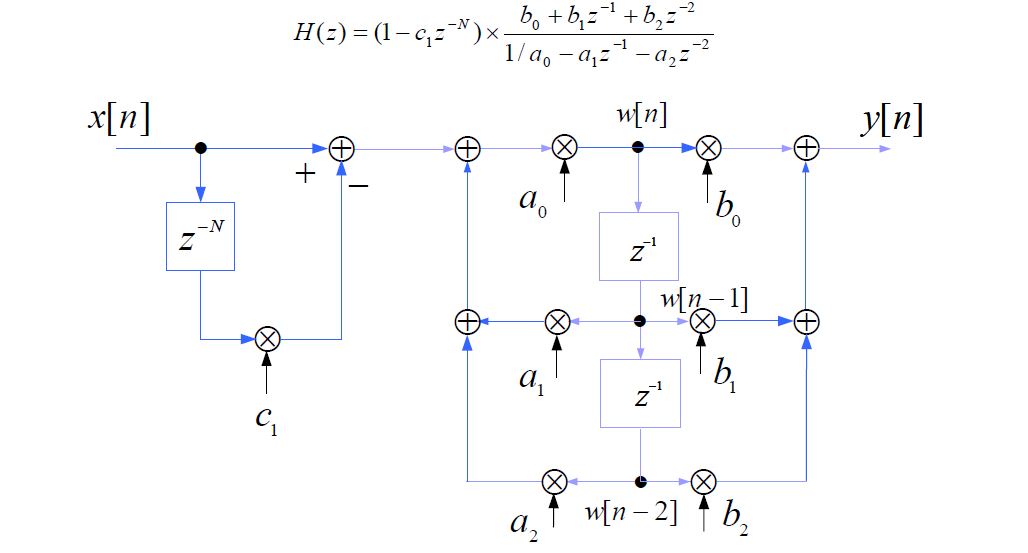
Swiss Army Knife of Digital Networks
- czyli wielofunkcyjny filtr cyfrowy -
- agregat filtru grzebieniowego FIR (ang. comb filter) i ogniwa bikwadratowego IIR (ang. biquad)
Transmitancja H(z) wielofunkcyjnego filtru cyfrowego
(FC), na podstawie którego można wygenerować filtry pokazane na następnych stronach, o numerach
1., 1.2, 1.1
Twierdzenia i definicje wykorzystywane w projekcie:
Def.1
System odwracalny - System przyczynowy BIBO stabilny o transmitancji H(z) takiej, że
istnieje system odwrotny, czyli przyczynowy BIBO stabilny system o
![]()
transmitancji .
Transmitancja systemu odwracalnego ma wszystkie zera i bieguny wewnątrz okręgu jednostkowego.
Def. 2
System BIBO (ang. Bounded Input Bounded Output) stabilny - System przyczynowy z zerowymi warunkami początkowymi o ograniczonej odpowiedzi dla każdego ograniczonego pobudzenia. Warunkiem koniecznym i dostatecznym BIBO stabilności jest
bezwzględna sumowalność odpowiedzi impulsowej
lub położenie biegunów transmitancji wewnątrz okręgu jednostkowego.
Def. 3
System liniowo fazowy - System z uogólnioną liniową charakterystyką fazową
co jest równoważne stałemu opóźnieniu
grupowemu
Jeżeli system liniowo fazowy jest
przyczynowy, BIBO stabilny, ma rzeczywistą odpowiedź impulsową
i wymierną transmitancję, to nie ma innych biegunów niż w zerze,
zera są parami odwrotne i zespolone sprzężone, a odpowiedź
impulsowa h[n] jest skończona. Transmitancja jest wielomianem

![]()
argumentu z-1 o rzeczywistych współczynnikach
Współczynniki bi są zarazem próbkami odpowiedzi impulsowej
jednej z czterech typów (z symetrią parzystą lub nieparzystą, z parzystą lub nieparzystą liczbą próbek).
1.Ewelina
Ewelina
Ewelina
2. Filtr różnicujący (ang. Differencer)
Transmitancja układu:
Równanie różnicowe:
y[n]= b0x[n]-b1x[n-1]
Charakterystyki wzorcowe filtru:
Opracowane charakterystyki:
Wnioski:
Filtr nie jest odwracalny, gdyż posiada bieguny i zera na okręgu jednostkowym.
Zgodnie z definicją trzecią oraz opracowanymi charakterystykami filtru można stwierdzić, że analizowany filtr jest liniowo fazowy. Odpowiedź impulsowa h[n] jest skończona, a rozkład zer i biegunów jest w początku układu współrzędnych.
W odniesieniu do definicji o BIBO stabilności można wywnioskować, że filtr średniej ruchomej jest BIBO stabilny, dla każdego ograniczonego pobudzenia daje ograniczoną odpowiedź.
3. Filtr średniej ruchomej
(ang. Moving Averager)
Charakterystyki wzorcowe filtru:
Opracowane charakterystyki:
Wnioski:
Filtr jest odwracalny, gdyż posiada bieguny i zera na okręgu jednostkowym.
Zgodnie z definicja trzecią oraz opracowanymi charakterystykami filtru można stwierdzić, że analizowany filtr jest liniowo fazowy. Odpowiedź impulsowa h[n] jest skończona, a rozkład zer i biegunów jest w początku układu współrzędnych.
W odniesieniu do definicji o BIBO stabilności można wywnioskować, że filtr średniej ruchomej jest BIBO stabilny, dla każdego ograniczonego pobudzenia daje ograniczoną odpowiedź.
Przykładowy kod z Matlaba (Moving Averager):
clear all; close all; clc;
%DANE WEJŚĆIOWE
a0 =1;
a1 = 1;
a2 =0;
N=8;
b0=1/N;
b1=0;
b2=0;
c1=1;
%FUNKCJA DOŁĄCZONA DO MATERIAŁÓW PROJEKTOWYCH
fvtool([b0 b1 b2 0 0 0 0 0 -c1*b0 -c1*b1 -c1*b2], [1/a0 -a1 -a2]);
1
14
Wyszukiwarka
Podobne podstrony:
Projekt betonu sekcja 1, GiG sem I - III
metrologia5ewwelina, ETI sem 3, metro
Projektowanie baz danych Wykłady Sem 5, pbd 2006.01.07 wykład03, Podstawy projektowania
wzór projektu JAO, Prywatne, studia(sem III), JAiO, języki automaty i obliczenia, projekty
cw2-projekt gówna, gik VI sem, GiK VI, SIP
sprawozdanie z cw 6, ETI sem 3, metro
projekt z trb Marcin T, Studia, Sem 5, SEM 5 (wersja 1), Technologia Robót Budowlanych, Technologia
UTF-8 Q nowy projekt wolnyy, Studia, Studia sem III, Uczelnia
Projektowanie baz danych Wykłady Sem 5, pbd 2005.10.02 wykład01, Każda dyscyplina naukowa posiada sw
Linie transmisyjne by mmichal68, ETI sem 3, OiS
projekt statku str 1 i 2, WOiO, sem II, Podstawy projektowania jachtów i jachtów
metrologia5, ETI sem 3, metro
Fiz budowli projekt 4, Budownictwo UTP, III sem, Fizyka budowli
projekt budownictwo strop, Studia, Sem 3, III, III Semestr, Budownictwo ogólne I, bud ogólne
Linie transmisyjne v.2, ETI sem 3, OiS
projekt 2 - moje, STUDIA BUDOWNICTWO, SEM IV, Mechanika Gruntów
WYKŁAD V - projektowanie bazy danych, Uczelnia, sem V, bazy danych, wyklad Rudnik
Autorobcw2, ETI sem 3, PAIR
więcej podobnych podstron