SILNIKI INDUKCYJNE W UKŁADACH POTRZEB WŁASNYCH ELEKTROWNI
Klasyfikacja układów potrzeb własnych
Silniki indukcyjne stanowią podstawowy rodzaj napędu elektrycznego urządzeń obsługujących procesy technologiczne elektrowni. Rozróżnia się dwie grupy układów i napędów potrzeb własnych, [K20]:
układy współpracujące z kotłami i generatorami, tzw. układy potrzeb własnych bloków (urządzenia kotłowni i maszynowni, a także instalacji odsiarczania spalin),
układy obsługujące procesy technologiczne wspólne dla całej elektrowni, tzw. układy potrzeb własnych ogólnych.
Z punktu widzenia zabezpieczenia ruchu elektrowni, urządzenia pomocnicze można uporządkować według trzech kategorii ważności, rys. 6.1
Rys. 6.1. Trzy kategorie napędów urządzeń potrzeb własnych elektrowni
Do kategorii I o najwyższym stopniu ważności należą silniki, których unieruchomienie nawet na kilka sekund prowadzi do zatrzymania kotła i turbozespołu. Silniki te są objęte automatyką samoczynnego załączania rezerwy zasilania (SZR). Do kategorii II należą silniki napędzające urządzenia potrzeb własnych, które mogą być wyłączane na bardzo krótki czas. Silniki tej kategorii powinny być także objęte zasilaniem rezerwowym. Kategorię III stanowią silniki, które można wyłączyć na dłuższy czas bez obawy zakłócenia procesu technologicznego elektrowni. Silniki te nie są objęte automatyką SZR i uruchamia je obsługa.
Silniki napędzające urządzenia potrzeb własnych w elektrowniach krajowych są na ogół silnikami indukcyjnymi z wirnikami klatkowymi. Zastosowane w I i II kategorii napędów nie wymagają żadnych dodatkowych układów rozruchowych, co umożliwia objęcie ich automatyką SZR. Silniki z III kategorii napędów coraz częściej współpracują z przemiennikami częstotliwości. Napędy potrzeb własnych są zasilane wyłącznie z przeznaczonych do tego celu rozdzielnic wysoko- i niskonapięciowych, przy czym każda rozdzielnica powinna mieć oddzielne zasilanie podstawowe i rezerwowe. W zależności od mocy bloku energetycznego elektrowni kształtuje się udział napędów o wysokim i niskim napięciu. Aktualnie ponad 90% mocy pobierają napędy potrzeb własnych bloków zasilane z rozdzielnic wysokonapięciowych. Stanowią one zwykle grupę kilkunastu sztuk napędów o dużych mocach jednostkowych (od stukilkudziesięciu kilowatów do kilku megawatów). Rozdzielnice niskonapięciowe zasilają natomiast bardzo liczną grupę silników o mocach rzędu kilkunastu kilowatów. W Polsce w elektrowniach cieplnych dominuje jeden poziom wysokiego napięcia rozdzielnic - 6 kV. Coraz częściej jednak rozważa się możliwość zwiększenie tego napięcia do technicznie uzasadnionego poziomu 10 kV dla bloków energetycznych dużej mocy. Uzyskuje się przez to ograniczenie prądów roboczych i zwarciowych o 40%. Ponadto wyższy poziom napięcia poprawia warunki rozruchu i samorozruchu silników. Zagadnienie to wiąże się jednak z koniecznością budowy silników o napięciu znamionowym 10 kV, co wpływa na ich parametry i charakterystyki eksploatacyjne. Silniki indukcyjne o napięciu znamionowym 10 kV są o (20 ÷ 25)% droższe od silników na napięcie 6 kV, a ponadto ich sprawność jest nieco mniejsza. Moc znamionowa takich silników nie powinna być mniejsza od 630 kW, aby uniknąć słabego wykorzystania czynnych materiałów przewodowych oraz rdzenia. Dla porównania dolna granica mocy silników o napięciu znamionowym 6 kV wynosi 200 kW.
Charakterystyki i parametry silników indukcyjnych potrzeb własnych
Właściwości silników dla energetyki
Silniki instalowane w układach potrzeb własnych elektrowni muszą spełniać wysokie wymagania techniczne. Wynika to z ekstremalnych warunków występujących podczas SZR oraz w czasie rozruchu urządzeń. Szczególnie istotna jest wartość momentu rozruchowego i związana z nim wartość prądu rozruchowego, która przy projektowaniu silników musi być ściśle przestrzegana. Według [N1] silniki indukcyjne o normalnym przeznaczeniu powinny wytrzymywać przez 15s bez utknięcia i nagłej zmiany prędkości obrotowej (przy stopniowym wzroście momentu obciążenia), przeciążenie momentu o krotności 1,6 w stosunku do znamionowego momentu obrotowego przy znamionowym napięciu i znamionowej częstotliwości. Większe krotności przeciążenia momentu są wymagane w przypadku niektórych silników (m. in. dla potrzeb energetyki) produkowanych wg IEC 60034 -12, [N5]. Wymienione w p. 6.1 kategorie napędów potrzeb własnych mają różne charakterystyki momentu obciążającego, które rzutują na warunki rozruchu i pracy silników (rys. 6.2).
Rys. 6. 2. Charakterystyki momentu obciążającego różnych urządzeń potrzeb własnych elektrowni, wg [K20]
Stosownie do tych warunków w napędach potrzeb własnych wykorzystuje się trzy podstawowe typy silników indukcyjnych:
silniki indukcyjne głębokożłobkowe,
silniki indukcyjne dwuklatkowe,
silniki jednoklatkowe, niskonapięciowe.
W działaniu silników głębokożłobkowych i dwuklatkowych wykorzystuje się zjawisko naskórkowości. Poprzez zastosowanie głębokiego żłobka (rys. 6.3) lub podwójnej klatki (rys.5.4), uzyskuje się podczas rozruchu wypieranie prądu odpowiednio, do górnej części pręta lub do górnej klatki, co w sposób zasadniczy wpływa na charakterystyki momentu obrotowego silnika.
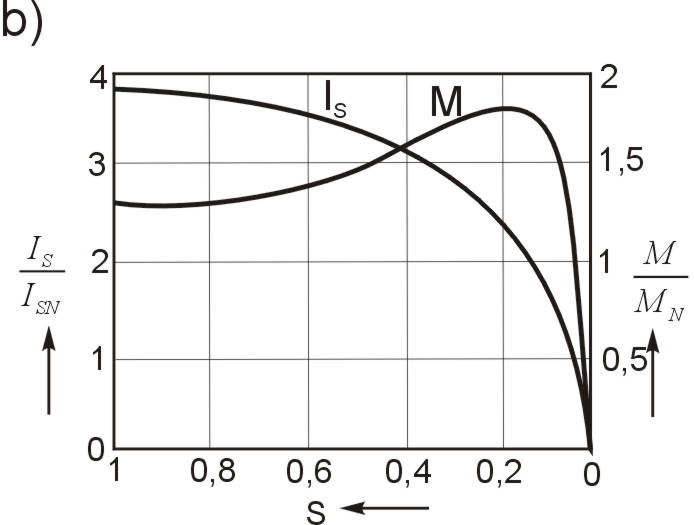
Rys. 6.3. Silnik głębokożłobkowy:
a) kształty prętów uzwojenia wirnika (A- prostokątny, B- trapezowy, C- kołowy, D- typu L)
b) charakterystyki prądu stojana i momentu![]()
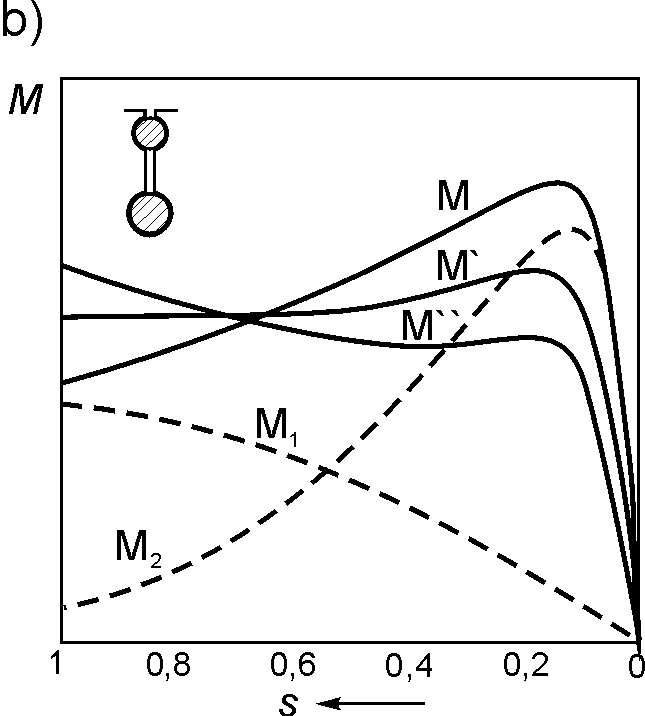
Rys. 6.4. Silnik dwuklatkowy
a) kształty prętów klatki rozruchowej - 1 oraz klatki roboczej - 2,
b) charakterystyki momentów: M1 - moment klatki rozruchowej, M2 - moment klatki roboczej, M = M1 + M2; M' i M" - momenty wypadkowe przy zmienionych wymiarach przekroju klatek
Silnik głębokożłobkowy cechuje się dużą wysokością h pręta klatki wirnika w stosunku do szerokości b. Ze względów technologicznych i prostą konstrukcję najszersze zastosowanie ma pręt prostokątny lub trapezowy - rozwiązania z rys. 5.3a. Przy podejściu klasycznym, stopień wypierania prądu w pręcie określają dwa współczynniki: współczynnik kR ujmujący wzrost rezystancji oraz współczynnik kX, ujmujący zmianę reaktancji rozproszenia żłobkowego. Oznaczmy przez Rp rezystancję pręta (ściślej: części pręta znajdującej się w żłobku rdzenia) dla prądu przemiennego, a przez R rezystancję tegoż pręta przy przepływie prądu stałego. Wtedy współczynnik zmiany rezystancji
![]()
(6. 1)
i analogicznie dla reaktancji
![]()
(6. 2)
gdzie Xp jest reaktancją pręta obliczoną z uwzględnieniem wypierania prądu przy prądzie przemiennym, a reaktancja X bez wypierania prądu czyli przy równomiernym rozkładzie gęstości prądu. Parametrem, od którego zależy wartość współczynnika wypierania prądu, jest współczynnik wysokości pręta zwany również zredukowaną, czyli bezwymiarową wysokością pręta
(zatem kR = ϕ (ξ) oraz kX = ψ (ξ)), natomiast
![]()
(5. 3)
gdzie h jest rzeczywistą wysokością pręta prostokątnego lub trapezowego w cm, natomiast parametr α dla pręta prostokątnego opisuje wzór [K21]:
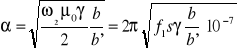
(5. 4)
przy czym: b' jest szerokością żłobka, s oznacza poślizg, a γ jest przewodnością materiału pręta.
Przy klatkach silników zalewanych aluminium można przyjmować b/b' =1, natomiast przy klatkach prętowanych i spawanych występuje pewien luz technologiczny w żłobku i wtedy b/b' = 0,85 ÷ 0,95.
Dla pręta prostokątnego obowiązują następujące zależności:
![]()
(6. 5)
oraz
![]()
(6. 6)
Wartości liczbowe tych współczynników w funkcji zredukowanej wysokości pręta podaje
tablica 6.1.
Tablica 6.1. Wartości współczynników zmiany rezystancji i reaktancji kR oraz kX dla pręta prostokątnego, wg [K21]
ξ |
2 |
2,5 |
3 |
3,5 |
4 |
4,5 |
5 |
6 |
kR |
1,898 |
2,477 |
3,010 |
3,509 |
4,002 |
4,499 |
4,999 |
6,000 |
kX |
0,752 |
0,610 |
0,503 |
0,429 |
0,375 |
0,333 |
0,300 |
0,250 |
Z tablicy wynika, że dla ξ >3 można przyjmować bezpośrednio ![]()
oraz ![]()
.
Równocześnie ze wzrostem rezystancji pręta silnika głębokożłobkowego podczas rozruchu, maleje indukcyjność własna rozproszenia żłobkowego (w konsekwencji reaktancja), bowiem dolna część pręta jest prawie bez prądu. W miarę wzrostu prędkości obrotowej kR maleje a kX wzrasta. W zakresie pracy znamionowej ![]()
.
W przypadku żłobków trapezowych funkcje opisujące współczynniki kR i kX są bardziej złożone. W postaci graficznej (dla różnych wartości parametru ![]()
) zostały one przedstawione na rys. 5.5.
Rys. 6.5. Współczynniki wypierania prądu w pręcie o przekroju trapezowym,
a) współczynnik kR = ƒ1(ξ), b) współczynnik kX = ƒ 2(ξ), [K21]
![]()
Silnik dwuklatkowy jest zdeterminowany poprzez kształt klatek podwójnych (rzadziej potrójnych), a także sposób wykonania klatki (klatki odlewane lub spawane) - rys. 6.4a. Klatki odlewane wykonuje się najczęściej ze żłobkami w kształcie owalnym (kroplowym). Mają one zwykle jeden wspólny pierścień zwierający po każdej stronie rdzenia wirnika. Materiałem klatki jest najczęściej aluminium. Klatki spawane wykonuje się zwykle z typowych prętów o przekroju kołowym lub prostokątnym. Klatki te mają na ogół oddzielne pierścienie zwierające. Mimo braku galwanicznego połączenia pomiędzy klatkami ich działanie jest praktycznie takie samo, jak klatek odlewanych. Materiałem klatek spawanych jest najczęściej miedź. Dla klatki rozruchowej może to być także stop miedzi, np. brąz. Charakterystyki momentu silników dwuklatkowych zależą od kształtu i wymiarów obydwu klatek, a także od wymiarów ha i ba przesmyku pomiędzy klatkami. Na rys. 6.6. przedstawiono przykładowo charakterystyki momentu silnika dwuklatkowego o klatce odlanej z aluminium w funkcji dwóch parametrów: wysokości przesmyku ha i stosunku rezystancji Rprr/Rprp (Rprp - rezystancja pręta klatki rozruchowej, Rprp - rezystancja pręta klatki pracy), [K21]
Rys.6.6. Charakterystyki momentu silnika dwuklatkowego (PN = 30 kW, UN=400 V-![]()
, 2p=4)
w zależności od parametrów klatek, [K21]
a) Rprr/Rprp = 4 = const, ha = var, b) ha = 6 mm = const, Rprr/Rprp = var
Z przedstawionego wykresu wynika, że wzrost wysokości przesmyku ha powoduje wzrost momentu krytycznego i zmniejszenie momentu krytycznego (przyp. 6.6a). Z kolei zmniejszanie stosunku rezystancji Rprr/Rprp przy stałej wysokości przesmyku powoduje wzrost momentu krytycznego i jednocześnie powolniejszy wzrost momentu rozruchowego.
Rys. 6.8. Charakterystyki momentu obrotowego i prądu silników indukcyjnych o zaznaczonych kształtach żłobków; 1 - wirnik głębokożłobkowy, 2 - wirnik dwuklatkowy,
3 - wirnik jednoklatkowy (zwykły)
Przedstawione właściwości silników indukcyjnych predestynują je do zastosowania w określonych napędach urządzeń potrzeb własnych elektrowni. Można stwierdzić, że ze względu na charakter obciążenia tych urządzeń (podany na rys. 6.2), silniki głębokożłobkowe znajdują zastosowanie w napędach o wentylatorowej charakterystyce momentu obciążenia, cechujących się dużą mocą pobieraną w warunkach pracy ustalonej. Chodzi tu o napędy pomp wody zasilającej, wody chłodzącej i skroplin oraz wentylatorów i młynów ze sprzęgłami rozruchowymi na wale. Moce znamionowe tych silników są z reguły większe od 1000 kW. Z kolei silniki dwuklatkowe są stosowane do napędu urządzeń o bardzo ciężkim rozruchu, wymagających dużych momentów rozruchowych, tj. do napędu młynów i wentylatorów. Moce znamionowe silników instalowanych w takich napędach wynoszą od 100 kW do 1000 kW. Wreszcie silniki jednoklatkowe, niskonapięciowe są stosowane do napędu małych urządzeń potrzeb własnych bez specjalnych wymagań co do rozruchu i obciążenia.
Podstawowe dane techniczne napędów potrzeb własnych bloków 360 MW, 200 MW i
120 MW
Charakterystyka silników indukcyjnych, stanowiących główne napędy potrzeb własnych bloku 360 MW została przedstawiona na przykładzie Elektrowni Bełchatów. Elektrownia ta pracująca na węglu brunatnym (12 bloków o mocy 360 MW), posiada obok Elektrowni Opole rozwiązania techniczne układów zasilania i napędów potrzeb własnych najnowocześniejsze w kraju. Elektrownia Bełchatów współpracuje z systemem elektroenergetycznym za pośrednictwem stacji 400/220 kV zlokalizowanej w odległości 5 km od elektrowni w miejscowości Rogowiec. Do rozdzielni 220 kV jest przyłączonych pięć pierwszych bloków 360 MW, natomiast pozostałe siedem do rozdzielni 400 kV - rys. 5.9.
Rys. 6.8. Uproszczony schemat zasilania układu potrzeb własnych Elektrowni Bełchatów
(wg [A12], za zgodą Zarządu Elektrowni)
Napędy potrzeb własnych wymagają bardzo pewnego zasilania elektrycznego, czyli źródeł rezerwowych. Źródłem zasilania rezerwowego jest zazwyczaj państwowa sieć energetyczna wspomagana pracą innych bloków. Źródła i tory zasilania rezerwowego powinny przy tym spełniać szczególne wymagania co do:
sztywności napięcia zasilającego (podczas samorozruchu grupowego silników, napięcie na ich zaciskach nie powinno obniżyć się poniżej 0,75 UN dla silników o napięciu znamionowym 6 kV oraz poniżej wartości 0,7 UN dla silników 0,4 kV),
niezależności napięcia od źródła podstawowego (wszelkie zakłócenia w tym zwarciowe w torze wyprowadzenia mocy bloku oraz w sieci powiązanej bezpośrednio z torem nie powinny wpływać na to napięcie),
niezawodności napięcia (źródło powinno być stale gotowe do podania napięcia na odpowiednią sekcję rozdzielni potrzeb własnych).
Przełączanie sekcji rozdzielni napędów potrzeb własnych bloków na zasilanie rezerwowe odbywa się przy zakłóceniach w rozdzielni głównej elektrowni powodujących odłączenie bloku, przy zakłóceniach w linii wysokiego napięcia toru wyprowadzenia mocy, a także przy długotrwałych awariach w rozdzielniach potrzeb własnych. Przełączanie dotyczy napędów niezbędnych do bezpiecznego odstawienia bloku tj. silników obsługujących pompę rezerwowo-rozruchową wody zasilającej, pompę wody chłodzącej, pompę cyrkulacyjną, pompy kondensatu, wentylatora spalin i wentylatora powietrza, a także inne grupy napędów zasilane napięciem 0,4 kV. Parametry tych silników dla bloków o mocach 360 MW, 200 MW i 120 MW podano w tablicach 6.2, 6.3 oraz 6.4.
Tablica 6.2. Parametry znamionowe silników potrzeb własnych bloku 360 MW zasilanych z rozdzielni 6 kV (Elektrownia Bełchatów)
Rodzaj napędu |
Oznaczenie |
Liczba silnik. w sekcji rozdzielni |
Liczba silnik. |
Typ silnika |
PN |
IN |
p |
nN |
ηN |
cos ϕN |
kI |
mN |
|
|
|
sekcja A |
sekcja B |
prac. jednocz. |
|
kW |
A |
- |
obr. min |
- |
- |
- |
- |
Pompa wody zasilającej |
PWZ |
- |
1 |
1 |
SYJc 154t |
6300 |
690 |
2 |
1490 |
0,965 |
0,91 |
5,2 |
2,2 |
Pompa wody chłodzącej |
PWCh |
1 |
1 |
2 |
SBJVe 1716r |
2000 |
235 |
8 |
370 |
0,946 |
0,86 |
5,0 |
2,1 |
Pompa cyrkulacyjna |
PC |
1 |
1 |
1 |
HT 2550 M3 |
780 |
105 |
2 |
1450 |
0,875 |
0,82 |
4,9 |
2,0 |
Pompa kondensatu |
PK |
1 |
1 |
1 |
SBDVdm 134t |
1000 |
115 |
2 |
1485 |
0,940 |
0,86 |
5,6 |
2,1 |
Wentylator spalin |
WS |
1 |
1 |
2 |
SYJe 1610t |
3150 |
371 |
5 |
582 |
0,950 |
0,86 |
5,5 |
2,3 |
Wentylator powietrza |
WP |
1 |
1 |
2 |
SZJre 144tE |
1800 |
214 |
2 |
1490 |
0,945 |
0,90 |
5,5 |
2,3 |
Młyn węglowy |
MW |
4 |
4 |
6 |
SZJre 144sE |
1500 |
172 |
2 |
1490 |
0,935 |
0,90 |
5,5 |
2,3 |
Oznaczenia:
kI - krotność prądu rozruchowego, mN - przeciążalność momentem,
Tablica 6.3. Parametry znamionowe silników potrzeb własnych bloku 200 MW (Elektrownia Pątnów - PAK)
Rodzaj napędu |
Oznaczenie |
Liczba silników |
Typ silnika |
PN |
UN |
IN |
p |
nN |
ηN |
cos ϕN |
kI |
mN |
|
|
|
|
kW |
kV |
A |
- |
obr/min |
- |
- |
- |
- |
Pompa wody zasilającej |
PWZ |
3 |
SYJd 142th |
3150 |
6 |
353 |
1 |
2980 |
0,945 |
0,91 |
5,0 |
2,1 |
Pompa wody chłodzącej |
PWCh |
2 |
SBJV 1616s |
1250 |
6 |
156 |
8 |
370 |
0,942 |
0,82 |
4,5 |
2,0 |
Wentylator spalin |
WS |
3 |
SZDr 148 |
700 |
6 |
83 |
4 |
740 |
0,925 |
0,88 |
5,5 |
2,2 |
Wentylator powietrza |
WP |
3 |
SZDr 138s |
500 |
6 |
64 |
4 |
735 |
0,925 |
0,82 |
4,5 |
2,1 |
Młyn węglowy |
MW |
7 |
SZDr 138r |
400 |
6 |
51 |
4 |
735 |
0,915 |
0,82 |
3,7 |
2,0 |
Pompa kondensatu |
PK |
3 |
SZDVc 174s |
200 |
6 |
25 |
2 |
1485 |
0,922 |
0,85 |
5,9 |
2,1 |
Oznaczenia jak w tab. 5.2.
Tablica 6.4. Parametry znamionowe silników potrzeb własnych bloku 120 MW (Elektrownia Adamów - PAK)
Rodzaj napędu |
Oznaczenie |
Liczba silników |
Typ silnika |
PN |
UN |
IN |
p |
nN |
ηN |
cos ϕN |
kI |
mN |
|
|
|
|
kW |
kV |
A |
- |
obr/min |
- |
- |
- |
- |
Pompa wody zasilającej |
PWZ |
2 |
SYJd 142th |
3150 |
6 |
353 |
1 |
2980 |
0,945 |
0,91 |
5,0 |
2,1 |
Pompa wody chłodzącej |
PWCh |
1 |
SBJVe 1512r |
1250 |
6 |
149 |
6 |
490 |
0,945 |
0,84 |
5,0 |
1,8 |
Wentylator spalin |
WS |
2 |
SZJre 148r |
1000 |
6 |
122 |
4 |
742 |
0,940 |
0,84 |
5,2 |
2,1 |
Wentylator powietrza |
WP |
2 |
SCDd 1310A |
400 |
6 |
51,4 |
5 |
585 |
0,932 |
0,81 |
5,8 |
2,3 |
Młyn węglowy |
MW |
6 |
SZDr 1310sp |
430 |
6 |
55 |
5 |
585 |
0,931 |
0,82 |
5,8 |
2,3 |
Stany nieustalone w silnikach indukcyjnych potrzeb własnych podczas SZR
Wprowadzenie
Samoczynne załączanie rezerwy (SZR) wywołuje zakłócenia ustalonej pracy napędów, którym towarzyszą procesy przejściowe charakteryzujące się znacznymi odchyleniami wartości prądów, momentów oraz prędkości obrotowej od wartości ustalonej. Na charakter stanu nieustalonego napędu wpływa wiele czynników takich, jak: rodzaj obciążenia, typ i cechy konstrukcyjne silnika, rodzaj przekładni mechanicznych oraz właściwości aparatury łączeniowej i sterowniczej. Oddziaływuje także na ten stan bezwładność mechaniczna wirujących i przemieszczających się mas oraz bezwładność elektromagnetyczna i bezwładność cieplna maszyn elektrycznych. W analizie inżynierskiej rzeczywistych stanów przejściowych silników indukcyjnych na ogół zaniedbuje się wpływ bezwładności procesów cieplnych, które zachodzą znacznie wolniej, niż nieustalone procesy elektromechaniczne. Najczęściej spotykane w praktyce stany awaryjne układów napędowych w elektrowni, to przerwa beznapięciowa w sieci zasilającej napędy oraz zmiana wartości napięcia zasilającego bez wystąpienia przerwy beznapięciowej. Zmiana wartości napięcia może być spowodowana przyłączeniem dodatkowego transformatora do pracy równoległej, włączeniem silnika o dużej mocy (np. pompy wody zasilającej), a także spadkiem napięcia podczas szczytu energetycznego, [K6]. Badania stanów nieustalonych, zachodzących w silnikach indukcyjnych oraz złożonych elektromechanicznych układach potrzeb własnych są prowadzone przy wykorzystaniu różnych modeli matematycznych [K3], [K5], [A13].
Punktem wyjścia do matematycznego opisu tych modeli są (podobnie jak w przypadku generatora synchronicznego - podrozdział 2.10), wektory przestrzenne typowych wielkości elektrycznych i elektromagnetycznych, trójfazowych (najogólniej m- fazowych) uzwojeń stojana i wirnika maszyny indukcyjnej i ich transformacja do wybranego układu współrzędnych prostokątnych: d, q, α, β oraz x, y. Analiza elektromechanicznych stanów dynamicznych maszyny indukcyjnej jest sprowadzana najczęściej do maszyny uogólnionej o dwóch parach uzwojeń w stojanie i wirniku, rozpatrywanych w układzie współrzędnych x,y na płaszczyźnie zespolonej stojana, która wiruje z prędkością kątową synchroniczną (ωx = ωs) - tzw. transformacja Krona, [K25]∗.
Równania stanu elektrodynamicznego maszyny indukcyjnej
Przy zasilaniu uzwojeń fazowych stojana napięciem symetrycznym (bez składowych zerowych) i przetransformowaniu wielkości fazowych z układu naturalnego u, v, w do układu współrzędnych prostokątnych x, y wirującego z dowolną prędkością ωx = ωxy, obowiązują równania, [K19]:
- dla stojana
![]()
(6. 14)
- dla wirnika
![]()
(6. 15)
Przy czym:
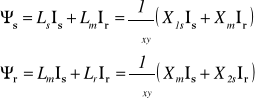
![]()
- wektor przestrzenny strumienia skojarzonego z uzwojeniem, odpowiednio stojana lub wirnika,
I s,r - wektor przestrzenny prądu stojana lub wirnika,
![]()
- wektor przestrzenny napięcia stojana lub wirnika,
![]()
- kątowa prędkość elektryczna układu wirującego x, y,
![]()
- aktualna kątowa prędkość wirnika silnika, której odpowiada poślizg s,
p - liczba par biegunów silnika
Schemat zastępczy silnika indukcyjnego o stałych skupionych (bez wypierania prądu), w układzie współrzędnych x, y, na płaszczyźnie zespolonej stojana, wirującym z dowolną prędkością kątową, przedstawiono na rys. 6.11.
Rys. 6.11. Schemat zastępczy dla stanów nieustalonych silnika indukcyjnego w układzie współrzędnych prostokątnych x, y, wirującym z dowolną prędkością ![]()
Warto zauważyć, że zwykle ze względu na z góry ustaloną prędkość wirowania układu współrzędnych prostokątnych, do którego transformowane są wielkości fazowe silnika, rozdział napięcia indukowanego na napięcie rotacji i transformacji ma znaczenie tylko formalne. Przez dobór prędkości wirowania tego układu można uprościć równania napięciowo-prądowe (614), (6.15) i odpowiednio schemat zastępczy. I tak np. przy transformacji wektorów przestrzennych na płaszczyznę wirnika i dla prędkości tego układu pokrywającej się z prędkością wirnika ![]()
, znika siła elektromotoryczna rotacji w wirniku (transformacja d, q).
W równaniach (6.14), (6.15) występuje sześć zmiennych w czasie wielkości (Us, Is, Ir, Ψs, Ψr, ω). Wielkości te oraz ich składowe, można wyznaczyć wprowadzając dodatkowe równania, określające zależności pomiędzy strumieniami skojarzonymi z uzwojeniami stojana i wirnika oraz wzbudzającymi je prądami, a także równanie momentów. Mamy zatem dla wektorów przestrzennych strumieni skojarzonych
![]()
(6. 16)
oraz równanie ruchu wirnika
![]()
(6.17)
Przy znanej zależności momentu obciążenia mechanicznego od prędkości wirowania Mm(ω), nieliniowe równania (6.14) ÷ (6.17) opisują elektrodynamiczny stan nieustalony maszyny indukcyjnej. Sprowadzając te równania stanu do układu współrzędnych prostokątnych x, y, wirującego z prędkością kątową ![]()
(transformacja Krona - rys. 6.12) i zarazem przekształcając je z dziedziny liczb zespolonych do dziedziny zmiennych rzeczywistych otrzymujemy

(6. 18)
Warto zaznaczyć, że siła elektromotoryczna rotacji występująca w równaniach napięciowych przetransformowanych obwodów wirnika, jest proporcjonalna do różnicy prędkości kątowych ![]()
, czyli do poślizgu s wirnika. Uwaga ta dotyczy również opisu obwodów wirnika na rys. 6.12.
Rys.6.12. Transformacja obwodów stojana i wirnika silnika indukcyjnego do układu współrzędnych x, y na „płaszczyznę synchroniczną” stojana ![]()
Transformacja obwodów stojana i wirnika do układu współrzędnych x, y nieruchomego względem pola wirującego stojana jest powszechnie wykorzystywana w analizie stanów dynamicznych silników indukcyjnych. Przekształcenie zależności (6.18) do postaci normalnej Cauchy'ego po dodatkowym wprowadzeniu określonych bezwymiarowych współczynników prowadzi do układu równań (6.19). Całkowanie tych równań w celu wyznaczenia poszukiwanych prądów i prędkości kątowej (lub poślizgu s) wirnika, odbywa się zwykle metodą Rungego- Kutty, [K4]
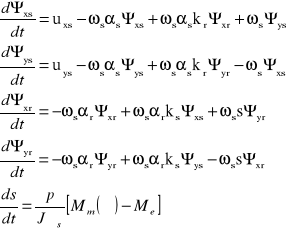
(6. 19)
przy czym moment elektromagnetyczny może być również określany z zależności
![]()
* (6. 20)
Współczynniki występujące w równaniach (5.19) i (5.20) wyrażają się wzorami [K20]:
![]()
![]()
, ![]()
, ![]()
, ![]()
(6. 21)
Są one bezpośrednio powiązane z przyjętym schematem zastępczym i modelem matematycznym silnika. Wartości prądów w uzwojeniach zastępczych x, y opisują wzory:

(6. 22)
Chwilowe wartości napięć i prądów fazowych w układzie naturalnym (u, v, w -stojan,
k, l, m -wirnik) oblicza się na podstawie przekształceń odwrotnych. Przykładowo dla uzwojenia jednej fazy stojana i wirnika mamy:
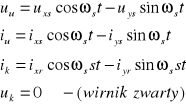
(6. 23)
Równania modelu silnika w układzie x, y poszerzone o nieliniowość magnetyczną oraz wypieranie prądu w wirniku, są podstawą obliczeń przykładowych stanów dynamicznych silników potrzeb własnych podczas SZR, przedstawionych w podrozdziałach 6.3.4 i 6.3.5.
Model matematyczny silnika głębokożłobkowego z wieloobwodowym odwzorowaniem wirnika
Liniowy model matematyczny silnika indukcyjnego dla instalowanych obecnie w układach potrzeb własnych dwuklatkowych i głębokożłobkowych silników indukcyjnych okazuje się niewystarczający. Stanowi on zwykle punkt wyjścia dla innych modeli, uwzględniających nieliniowość parametrów silnika powodowaną nasyceniem obwodu magnetycznego oraz wypieraniem prądu w wirniku. Wpływ tych zjawisk można uwzględnić, wprowadzając zmienność współczynników określonych wzorami (5.21) w funkcji prądu i poślizgu, a także charakterystyczną w stanach dynamicznych zależność od nasycenia indukcyjności głównej magnesującej Lm oraz indukcyjności rozproszenia Ls i Lr . Innym sposobem może być wybór modelu matematycznego silnika klatkowego z wieloobwodowym odwzorowaniem klatki wirnika, opisanego w pracach [K5], [K18]. W modelu tym obwody wirnika w których występuje wypieranie prądu są traktowane jako obwody o stałych rozłożonych, do opisu których wykorzystuje się równania różniczkowe cząstkowe. Uzwojenie wirnika jest odwzorowane wieloma obwodami, którym odpowiadają elementy podziałowe bez wypierania prądu (podział wzdłuż wysokości w funkcji zmiennej x mierzonej od dna żłobka). Gdy liczba elementów podziału dąży do nieskończoności, wówczas dwójnik reprezentujący impedancję klatki staje się linią długą o stałych rozłożonych. Schemat zastępczy silnika głębokożłobkowego z wieloobwodowym odwzorowaniem klatki wirnika elementami typu RL przedstawia rys. 6.13.
Rys. 6.13. Schemat zastępczy silnika klatkowego z wieloobwodowym odwzorowaniem klatki wirnika (N - liczba obwodów zastępczych), wg [K5];
Rs, Ls - odpowiednio rezystancja i indukcyjność rozproszenia uzwojenia stojana,
Ra, La - rezystancja i indukcyjność rozproszenia elementów uzwojenia wirnika wspólnych dla wszystkich klatek,
Lm - indukcyjność magnesująca (od strumienia głównego).
Pozostałe parametry omówiono w tekście poniżej.
Opis matematyczny silnika stanowią równania różniczkowe, które w tym przypadku podano w zwartej formie w zapisie macierzowym, [K5]:
![]()
= [M]-1 {U - jωs [1] - jω [K] [M] I - [R] I }

(6. 24)
gdzie:
U = (Us, 0, ...., 0)T - wektor przestrzenny napięć,
I = (Is, Ir1, Ir2,....., IrN)T - wektor przestrzenny prądów,
Us, Is, Ir1, Ir2,....., IrN - wartości napięcia i prądu uzwojenia stojana oraz prądów w
poszczególnych gałęziach schematu zastępczego uzwojenia
wirnika,
[M], [R] - macierz indukcyjności i rezystancji silnika,
[1] = diag (1, 1, ....., 1) - macierz jednostkowa,
[K] = diag (0, 1, 1,....., 1).
W przedstawionym schemacie zastępczym występuje skończona liczba N obwodów zastępczych wirnika. Wymaga to wprowadzenia parametrów formalnych, które uwzględniają indukcyjności rozproszenia i rezystancję własną elementów wirnika oraz indukcyjności rozproszenia i rezystancje zwane wielokrotnymi, [A9]. Indukcyjności rozproszenia Lari i rezystancje własne Rari poszczególnych elementów podziałowych pręta, występują w gałęziach podłużnych schematu i są określone wzorami:
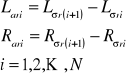
(6. 25)
gdzie:
Lσri, Rσri - odpowiednio indukcyjność rozproszenia i rezystancja i-tego elementu pręta.
Z kolei indukcyjność rozproszenia Lri oraz rezystancja Rri są parametrami i-tego obwodu wirnika, mającymi swoją reprezentację w gałęzi poprzecznej schematu zastępczego.
W modelu silnika z wieloobwodowym odwzorowaniem uzwojenia wirnika parametry Rs, Ls, Ra, La uzyskuje się w wyniku klasycznych obliczeń elektromagnetycznych, natomiast wyznaczenie parametrów Rri, Lri, Rai, Lai reprezentujących elementy klatki stanowi istotną trudność. Parametry te mogą być wyznaczone przy wykorzystaniu estymacji pomiarowej [K14], lub na drodze obliczeniowej przez rozwiązanie równania Riccatiego, określającego impedancję operatorową pręta wirnika. Takie podejście zostało opisane przez Nürnberga [K17] i rozszerzone dla pręta dowolnego kształtu w pracy [K5].
Wybieg i samorozruch silników potrzeb własnych
Jednym z najczęściej spotykanych w trakcie działania automatyki SZR stanów pracy napędów jest przerwa beznapięciowa. Pierwszym jej etapem jest zanik napięcia zasilającego, którego skutkiem jest wybieg napędów. Pod pojęciem wybiegu napędu rozumie się proces zmiany prędkości obrotowej (lub poślizgu dla silnika indukcyjnego) w funkcji czasu, począwszy od wartości ustalonej, przy której nastąpiła przerwa, aż do zatrzymania się napędu. Wybieg indywidualny, to wybieg pojedynczego zespołu napędowego natomiast wybieg grupowy, to proces jakiemu podlega grupa silników zasilana ze wspólnych szyn. Drugim etapem stanu nieustalonego napędu jest samorozruch napędu. Pod pojęciem samorozruchu rozumie się proces jakiemu podlega zespół napędowy po powrocie zasilania czyli np. po załączeniu źródła napięcia rezerwowego.
W chwili początkowej zaraz po wyłączeniu silnika, na skutek bezwładności mechanicznej, jego prędkość obrotowa pozostaje praktycznie niezmieniona. Zmniejszanie się prędkości wirnika w czasie trwania wybiegu jest spowodowane działaniem mechanicznego momentu obciążenia. Jednocześnie prądy w uzwojeniach silnika maleją do zera, jednak prądy w prętach klatki wirnika utrzymują ciągłość strumienia skojarzonego z tym uzwojeniem, podtrzymując pole elektromagnetyczne istniejące przed odłączeniem uzwojenia stojana. W silniku występuje pole niestłumione, którego konsekwencją jest pojawienie się napięcia na zaciskach uzwojenia stojana. Jest to tzw. napięcie resztkowe (lub szczątkowe) maszyny indukcyjnej. Napięcie to dla czasu t > 0 można przedstawić wzorem [K18]:
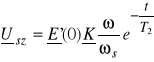
(6.26)
przy czym
![]()
![]()
(6. 27)
gdzie:
E'(0) - indukowane napięcie wewnętrzne w chwili t = 0,
Us(0) - wartość napięcia stojana dla t = 0,
Is(0) - początkowa wartość prądu stojana,
σ - współczynnik rozproszenia uzwojeń,
T2 - stała czasowa zanikania strumienia sprzężonego wirnika.
W czasie przełączania źródeł zasilania główne napędy są dołączone do szyn rozdzielni potrzeb własnych. Na otwartych zestykach wyłącznika toru rezerwowego występuje w tym czasie różnica napięć źródła rezerwowego i szczątkowego. Napięcie to, zwane napięciem różnicowym, wskutek różnych częstotliwości obydwu napięć ma charakter dudnień. W przypadku SZR wolnego, w większości przypadków czas zaniku napięcia szczątkowego wynosi ok. 1,5 s. W tym czasie trwa wybieg grupowy silników indukcyjnych głównych napędów. Uwzględniając wcześniej podane równania stanu, dla k = 1÷n wybiegających silników otrzymuje się wynikowe składowe napięcia szczątkowego w postaci, [K20]:
, 
(6. 28)
Zakładając, że wektor zastępczy napięcia źródła rezerwowego pokrywa się z dodatnim kierunkiem osi 0 x, można wyznaczyć składowe wektora napięcia różnicowego
![]()
, ![]()
(6. 29)
Wartość chwilową tego napięcia uzyskuje się z równania transformacji odwrotnej
![]()
(6. 30)
Napięcie szczątkowe na szynach rozdzielni jest wynikiem superpozycji napięć wewnętrznych n niezależnych źródeł o pulsacjach równych elektrycznym prędkościom wirników wybiegających silników. Z drugiej strony czynnikiem determinującym chwilowe wartości pulsacji napięcia szczątkowego jest bilans energetyczny wybiegających grupowo silników, które tworzą układ zamknięty. Pulsacja rzeczywista tego układu ustala się według proporcji udziału cząstkowych energii chwilowych poszczególnych silników. Na tej podstawie wyprowadzono zależność określającą poślizg napięcia szczątkowego
(6. 31)
gdzie:
krk, Rrk, sk - odpowiednio, współczynnik skojarzenia uzwojeń, rezystancja wirnika i poślizg
k-tego silnika.
Po załączeniu zasilania przy obniżonej prędkości obrotowej silników następuje samorozruch grupowy. Gdy stan elektromagnetyczny silników nie jest zerowy towarzyszą temu udary prądowe, oddziałujące dynamicznie na połączenia czołowe uzwojeń stojana, jak również - działania termiczne na klatkę wirnika. Z tego względu krajowi producenci silników indukcyjnych dla potrzeb energetyki dopuszczają wartość napięcia szczątkowego w chwili załączenia źródła rezerwowego nie większą od 0,4 UN. Prądy samorozruchu powodują obniżenie napięcia na szynach rozdzielni. Według obowiązujących przepisów (WTO - 80, ZPBE - "Energopomiar"), obniżone napięcie w pierwszej fazie samorozruchu grupowego nie powinno przekraczać wartości 0,75 UN, gdyż grozi to termicznym uszkodzeniem izolacji uzwojeń. Przeprowadzone badania podczas przełączeń zasilania rozdzielni potrzeb własnych krajowych bloków energetycznych, pozwoliły określić krotności prądów samorozruchu, które są następujące, [A15]:
kIs = 2,5 ÷ 4,2 - dla bloków 200 MW opalanych węglem brunatnym,
kIs = 3,5 ÷ 4,5 - dla bloków 200 MW i 500 MW opalanych węglem kamiennym,
kIs = 4,5 ÷ 5,5 - dla bloków 360 MW opalanych węglem brunatnym.
Prąd rozruchu dopływający z rozdzielni rezerwowej jest sumą prądów n silników biorących udział w samorozruchu. Równania więzów zewnętrznych dla silników mają w tym przypadku postać
(6. 32)
gdzie XT jest dominującą w torze zasilającym reaktancją zwarcia transformatora rezerwowego.
Przyjmując podobnie jak dla wybiegu grupowego, że wektor zastępczy napięcia źródła rezerwowego pokrywa się z dodatnim kierunkiem osi x układu współrzędnych x, y, można zapisać równania (5.32) dla składowych
(6. 33)
Równania (5.33) wraz z podanymi wcześniej równaniami stanu elektrodynamicznego zapisanymi dla n silników, stanowią opis matematyczny stanu samorozruchu.
W celu ograniczenia spadków napięć w torze zasilania rezerwowego podczas samorozruchu grupowego wprowadza się automatykę odciążania, czyli SZR typu kaskadowego. Automatyka taka jest realizowana przy podziale silników napędowych na dwie grupy. Pierwsza grupa obejmuje napędy najważniejsze w tym o sterowanym obciążeniu (np. poprzez sprzęgła hydrokinetyczne). Druga grupa to młyny węglowe o charakterystyce typu wentylatorowego oraz wentylatory powietrza i spalin. Napędy tej grupy odznaczają się dużym momentem bezwładności i tylko nieznacznie zmniejszają podczas przerwy w zasilaniu swoją prędkością obrotową. Takie rozdzielenie napędów powoduje podczas samorozruchu silników ograniczenie prądu i mocy pobieranej z rozdzielni potrzeb własnych, co ilustruje rys. 6.14.
Rys. 6.14. Symulacja SZR kaskadowego dla napędów potrzeb własnych bloku 360 MW w Elektrowni Bełchatów; I - podstawowa grupa napędów, czas przerwy tp = 1,39s,
II grupa napędów, tp = 2,4 s (wg [K3], za zgodą autora)
a) napięcie na szynach rozdzielni, b) napięcie różnicowe, c) prąd pobierany z sekcji A rozdzielni potrzeb własnych
∗ Jedną z podstawowych zasług Krona jest to, że rozwijając prace Blondela, Parka i innych badaczy elektryków, sformułował równania maszyny uogólnionej
* Współczynnik ![]()
występujący w wyrażeniu na moment elektromagnetyczny, wynika z transformacji maszyny trójfazowej do uogólnionej maszyny o uzwojeniach w dwóch osiach, co jest udowodnione m. in. w [K10].
Kategoria I
młyny i wentylatory kotłowe,
pompy wody zasilającej i chłodzącej,
pompy oleju opałowego i inne
Kategoria II
młyny centralne oraz z zasobnikiem pośrednim pyłu,
pompy skroplin wody i pompy chłodnic oleju transf. i inne,
wentylatory podgrzewaczy powietrza i podgrzewacze,
wentylatory podmuchu kadzi transformatorów
Kategoria III - inne pomocnicze napędy:
pomp,
wentylatorów,
przenośników, itp.
Wyszukiwarka
Podobne podstrony:
K1 R1 R2, Edukacja, Elektrotechnika Magisterskie, Semestr 1, Maszyny Elektryczne
Maszyny 21, PWR ETK, Semestr V, Maszyny elektryczne - Laboratorium, sprawka maszyny
MASZYNY, MECHATRONIKA, IV Semestr, Maszyny i Napędy Elektryczne
ćw. 31 z maszyn, PWR ETK, Semestr V, Maszyny elektryczne - Laboratorium, sprawka maszyny
CW14, PWR ETK, Semestr V, Maszyny elektryczne - Laboratorium, cwiczenia
cw23, PWR ETK, Semestr V, Maszyny elektryczne - Laboratorium, cwiczenia
PYT EGZ MASZYNY OPRACOWANIE, Polibuda, III semestr, Maszyny Elektryczne
Maszyny Elektryczne - Pytania Z Egzaminów (2), Energetyka AGH, semestr 4, IV Semestr, Maszyny Elekt
Maszyny Elektryczne - Pytania Z Egzaminów (4), Energetyka AGH, semestr 4, IV Semestr, Maszyny Elekt
Lista5 2011L, Polibuda, Studia II stopnia, Semestr I, Maszyny elektryczne w energetyce
CW13, PWR ETK, Semestr V, Maszyny elektryczne - Laboratorium, cwiczenia
Sprawozdanie trójfaz silnika, MECHATRONIKA, IV Semestr, Maszyny i Napędy Elektryczne
sprawko 4, PWr W9 Energetyka stopień inż, IV Semestr, Maszyny i urządzenia elektryczne, Laboratorium
maszyny 22, PWR ETK, Semestr V, Maszyny elektryczne - Laboratorium, sprawka maszyny
Pytania z zaliczenia z maszyn elektrycznych, ZUT-Energetyka-inżynier, III Semestr, Maszyny elektrycz
cw34, PWR ETK, Semestr V, Maszyny elektryczne - Laboratorium, cwiczenia
maszyny pytania, Polibuda, IV semestr, maszyny elektryczne, PEWNIAKI
więcej podobnych podstron