Wyznaczanie równań stanu układu dynamicznego
Zadanie
Dany jest opis układu dynamicznego w postaci funkcji przejścia
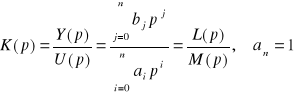
,
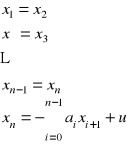
lub równoważny opis w postaci równania różniczkowego
.
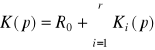
Poszukujemy opisu w postaci
![]()
gdzie: ![]()
.
Zaleta opisu za pomocą równań stanu: brak jawnej zależności od pochodnych sygnału wejściowego.
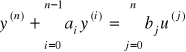
Metoda ogólna
Może być zastosowana gdy współczynniki ![]()
.
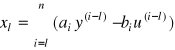
Jako zmienne stanu przyjmuje się
![]()
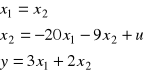
Otrzymujemy równania stanu
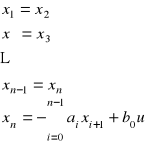
i równanie wyjścia
![]()
Uwaga. Metoda ogólna może być również stosowana do wyznaczania równań stanu układu nieliniowego opisanego równaniem różniczkowym
![]()
.
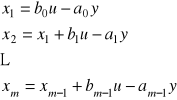
Metoda zmiennej pomocniczej
Wprowadzamy pomocniczą zmienną z tak jak ilustruje to poniższy rysunek

Na podstawie funkcji przejścia pierwszego elementu
![]()
,
korzystając z metody ogólnej, jako zmienne stanu przyjmuje się
![]()
Otrzymujemy równania stanu
Z opisu drugiego elementu
wyznaczamy równanie wyjścia
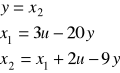
Korzystając z definicji zmiennych stanu oraz ostatniego równania stanu (![]()
) otrzymujemy

Wadą metody zmiennej pomocniczej jest to, że nie podaje ona wprost jawnej zależności łączącej zmienne stanu z sygnałami wejściowymi, wyjściowymi oraz ich pochodnymi. Zależność ta musi być wyznaczona dodatkowo.
Metoda kolejnych całkowań
Równanie różniczkowe układu
.
zapisujemy w postaci:
. (1)
Istota metody sprowadza się do całkowania równania (1) „na papierze”. Zauważmy, że
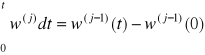
przy czy zależność ta obowiązuje tylko dla ![]()
.
Całkując to równanie (1) otrzymujemy

. (2)
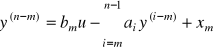
gdzie zmienna ![]()
uwzględnia warunki początkowe oraz składniki, których nie da się wprost scałkować. Pochodna zmiennej ![]()
spełnia równanie różniczkowe
![]()
Całkując równanie (2) otrzymujemy

. (3)
gdzie
![]()
Dokonując l całkowań równania (1) otrzymujemy

. (4)
gdzie
![]()
Na podstawie równania (4) można również określić związek między zmienną stanu ![]()
a sygnałami wejściowym, wyjściowym oraz ich pochodnymi
. (5)
W wyniku n całkowań równania (1) otrzymujemy
![]()
(6)
oraz
![]()
Podsumowując, otrzymaliśmy równanie wyjścia oraz n równań różniczkowych pierwszego rzędu
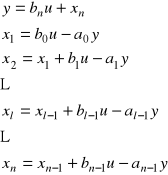
(7)
Opis w postaci układu (7) nie jest opisem w postaci równania stanu ale w takiej formie przy zachowaniu kolejności stosowany jest w modelach cyfrowych. Żeby otrzymać opis w postaci równań stanu wystarczy w równaniach różniczkowych w miejsce zmiennej y podstawić prawą stronę równania wyjścia.
Zaletą metody jest jawna zależność zmiennych stanu od sygnałów: wejściowego, wyjściowego oraz ich pochodnych. Metoda kolejnych całkowań może być również w szczególnych przypadkach zastosowana do wyznaczania równań stanu układu nieliniowego.
Metoda mieszana
Metoda mieszana jest połączeniem metody kolejnych całkowań i metody ogólnej. Jeżeli w wyniku kolejnych całkowań otrzymamy równanie różniczkowe, w którym brak zależności od pochodnych sygnału wejściowego, to dla wyznaczenia równań stanu otrzymanego równania różniczkowego można zastosować metodę ogólną.
Przyjmując, że współczynniki wielomianu licznika funkcji przejścia spełniają warunki: ![]()
, to po m całkowaniach otrzymujemy równanie różniczkowe
. (1)
i układ równań
(2)
Zamiast dokonywać kolejnych całkowań równania (1) możemy zastosować metodę ogólną.
Metoda równoległa
Metodę równoległą możemy stosować, gdy znane są pierwiastki mianownika funkcji przejścia. Niech dana jest postać iloczynowa mianownika
![]()
Poszukujemy rozkładu funkcji przejścia
gdzie
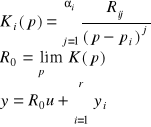
Oznacza to, że funkcję przejścia układu można przedstawić jako równoległe połączenie bloków operacyjnych.
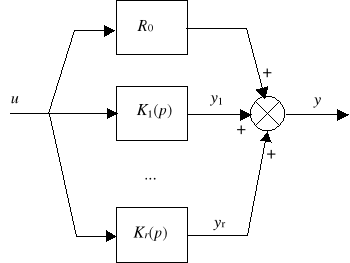
Dla każdej funkcji przejścia ![]()
wyznaczamy opis w postaci równań stanu. Podstawą do wyznaczania tych równań stanu może być następujący schemat blokowy.
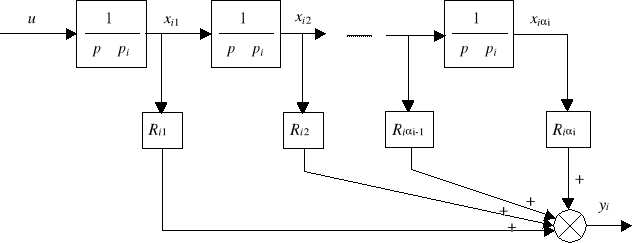
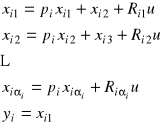
Równania stanu i równanie wyjścia opisujące ten układ są następujące:

Drugi sposób wyznaczania równań stanu dla funkcji przejścia ![]()
można uzyskać z następującego schematu blokowego
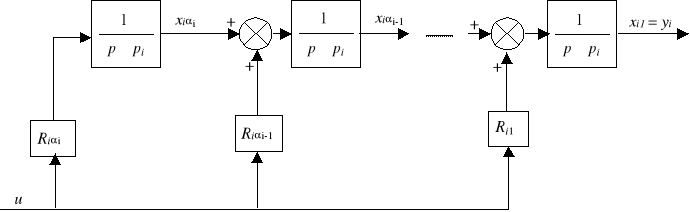
Równania stanu i równanie wyjścia opisujące ten układ są następujące:
Metoda szeregowa
W metodzie szeregowej przedstawiamy funkcję przejścia jako szeregowe połączenie układów
i dla każdej funkcji przejścia ![]()
znajdujemy równania stanu. Narysowanie schematu blokowego dla szeregowego połączenia i oznaczenie na nim sygnałów wyjściowych każdego bloku jest pomocne przy wyznaczaniu równań stanu.
Przykład
Wyznaczyć równania stanu dla układu opisanego funkcją przejścia
![]()
Metod ogólna. Metody tej nie można zastosować bo w liczniku występuje składnik 2p.
Metoda zmiennej pomocniczej. Stosując tę metodę przedstawiamy układ w postaci
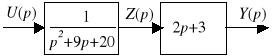
Na podstawie pierwszego elementu wyznaczamy równania stanu metodą ogólną a z drugiego elementu wyznaczamy równanie wyjścia. Równania te są postaci
Metoda kolejnych całkowań. Podstawą wyznaczania równań stany jest równanie różniczkowe układu
![]()
Całkując dwa razy to równanie otrzymujemy równanie wyjścia i równania stanu
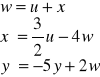
Metoda mieszana. Wystarczy raz scałkować równanie rózniczkowe. Otrzymujemy równania stanu
![]()
Metoda równoległa. Wyznaczamy rozkład funkcji przejścia na składniki
![]()
Współczynniki rozkładu są równe: ![]()
.
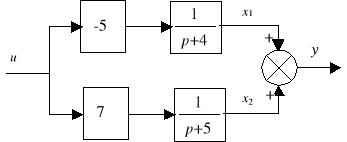
Stosując pierwszy sposób przedstawiamy funkcję przejścia w postaci schematu blokowego.
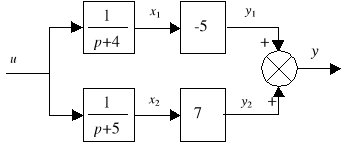
Ze schematy otrzymujemy równania stanu i równanie wyjścia
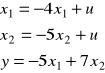
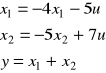
Stosując drugi sposób przedstawiamy funkcję przejścia w postaci schematu blokowego.
Ze schematy oyrzymujemy równania stanu i równanie wyjścia
Metoda szeregowa. Przedstawiamy układ jako szeregowe połączenie bloków.
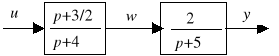
Stosując metodę kolejnych całkowań do bloku pierwszego i metodę ogólną do bloku drugiego otrzymujemy równania stanu
W opisie drugiego bloku przyjęto zmienną y jako zmienną stanu.
Wyznaczanie warunków początkowych zmiennych stanu
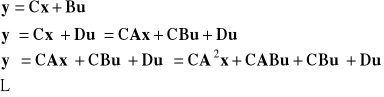
Dany jest opis modelu w postaci równań stanu
![]()
(1)
Pełny opis modelu wymaga również znajomości warunków początkowych zmiennych stanu. Zależność zmiennych stanu od zmiennych wejściowych, wyjściowych i ich pochodnych określona jest jawnie tylko w metodach: ogólnej, kolejnych całkowań i mieszanej. W pozostałych metodach zależność ta nie jest jawnie określona. Poniżej przedstawimy jak wyznaczyć zależność
![]()
(2)
Podstawą do wyznaczenia tej zależności jest układ równań utworzony przez równanie wyjścia i równania uzyskane w wyniku różniczkowania równania wyjścia, gdzie w miejsce pochodnych zmiennych stanu podstawiana jest prawa strona równania stanu.
(3)
Równanie (3) jest liniowo zależne od zmiennych stanu i można je zapisać następująco:
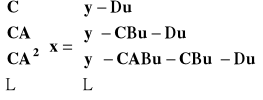
(4)
Poszukiwana zależność (2) może być wyznaczono jako rozwiązanie układu (4).
Wnioski:
Dla zerowych warunków początkowych w układzie
z równania (4) wynikają również zerowe warunki początkowe zmiennych stanu ![]()
.
Jednoznaczne rozwiązanie równania stanu istnieje gdy w układzie (4) macierz

posiada N liniowo niezależnych wierszy, gdzie N jest liczbą składowych wektora stanu.
Układy dynamiczne, dla których macierz H jest rzędu N nazywamy układami obserwowalnymi
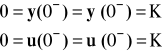
Przy wyznaczaniu warunków początkowych wektora stanu za pomocą równania (2) należy uwzględnić to, że sygnał wejściowy może być nieciągły. Tak więc, jeżeli występują nieciągłości, to wszystkie elementy muszą być określone jako lewostronne ![]()
granice
![]()
lub prawostronne ![]()
granice
![]()
Całkując równanie stanu otrzymujemy
Wartość ![]()
możemy wyznaczyć z zależności
Jeżeli sygnał wejściowy nie zawiera impulsów Dirac'a, to granica z całki jest równa 0, a to oznacza, że wektor stanu jest ciągły
Wniosek
Zmienne stanu są ciągłe w punktach skokowych zmian sygnału wejściowego
![]()
Przykład. Wyznaczyć zależność określającą warunki początkowe zmiennych stanu dla układu opisanego równaniami stanu (patrz metoda równoległa, sposób pierwszy)
Podstawą do wyznaczenia zależności jest układ równań

Jako rozwiązanie otrzymujemy
Wyznaczanie wartości początkowych zmiennych wyjściowych
Potrzeba wyznaczania wartości początkowych zmiennych wyjściowych występuje przykładowo w programie PSMA. Tworząc model z wykorzystaniem bloków DCON i MCON, należy jako parametry tych bloków podać wartości początkowe sygnałów wyjściowych w chwili ![]()
. Korzystając z równania wyjścia mamy
Odejmując te równania i uwzględniając ciągłość zmiennych stanu, otrzymujemy
![]()
(1)
Podobne zależności można również wyznaczyć dla pochodnych sygnału wyjściowego
Przykład. Dany jest układ opisany schematem blokowym
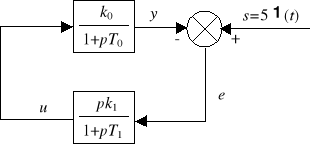
Model układu ma być zbudowany za pomocą programu PSMA. W modelu tym element różniczkujący z inercją reprezentowany ma być przez blok DCON. Należy więc określić wartość ![]()
.
W tym celu należy wyznaczyć współczynnik D i wykorzystać odpowiednio zmodyfikowane równanie (1). Na podstawie schematu blokowego wyznaczamy funkcję przejścia
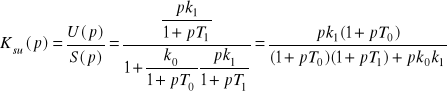
Współczynnik D jest niezależny od sposobu wyznaczania równań stanu. Można go wyznaczyć tak jak pokazano w metodzie równoległej.
![]()
Brakujący warunek początkowy może być wyznaczony ze wzoru
![]()
Przyjmując zerowe warunki początkowe w układzie mamy
![]()
Teoria sterowania i decyzji II
1/9
Wyszukiwarka
Podobne podstrony:
Wykład VII, politechnika infa 2 st, Projektowanie Systemów Informatycznych
Wykład XI, politechnika infa 2 st, Projektowanie Systemów Informatycznych
Wykład VII, politechnika infa 2 st, Projektowanie Systemów Informatycznych
Wykład XII, politechnika infa 2 st, Projektowanie Systemów Informatycznych
WYKŁAD XIII, politechnika infa 2 st, Projektowanie Systemów Informatycznych
ExamZero, politechnika infa 2 st, Projektowanie Systemów Informatycznych
SPRAWKO W 3, politechnika infa 2 st, Mikroprocesory
SPRAWKO W 8, politechnika infa 2 st, Mikroprocesory
PSI - wszystkie wykłady, politechnika infa 2 st, Projektowanie Systemów Informatycznych
PSI - wszystkie wykłady2, politechnika infa 2 st, Projektowanie Systemów Informatycznych
PSI - wszystkie wykłady3, politechnika infa 2 st, Projektowanie Systemów Informatycznych
Wykład IX, politechnika infa 2 st, Projektowanie Systemów Informatycznych
02 PSI, politechnika infa 2 st, Projektowanie Systemów Informatycznych
Wykład VIII, politechnika infa 2 st, Projektowanie Systemów Informatycznych
04 Systemy ekspertowe, politechnika infa 2 st, Projektowanie Systemów Informatycznych
Wykład X, politechnika infa 2 st, Projektowanie Systemów Informatycznych
01 BD, politechnika infa 2 st, Projektowanie Systemów Informatycznych
Wykład VII, politechnika infa 2 st, Projektowanie Systemów Informatycznych
Przekazniki i styczniki, Nauki Ścisłe Politechnika, Elektronika Teoria, Technika Cyfrowa, Technika C
więcej podobnych podstron