|
Instytut Techniczny |
Podstawy Układów Mechatronicznych |
|
Nowy Sącz 2008 |
Wybrane definicje mechatroniki:
Mechatronika to sposób projektowania i wytwarzania, polegająca na synergicznym, czyli skuteczniejszym niż wskazywałaby na to suma ich cech, połączeniu podstawowych nauk technicznych: mechaniki, elektroniki, informatyki i automatyki.
Teorią mechanizmów i maszyn zajmuje się Międzynarodowa Federacja Mechanizmów i Maszyn (IFToMM), która powstała dnia 28.9.1969 roku na kongresie w Zakopanem. Utworzona z 16 komitetów Narodów, kongresy odbywają się co 4 lata. W Polsce istnieje Polski Komitet Teorii Mechanizmów i Maszyn należący do IFToMM-u.
Mechatronika jest interdyscyplinarną dziedziną nauki i techniki, która zajmuje się problemami mechaniki, elektroniki i sterowania programowalnego.
Według definicji sformułowanej przez IFToMM pod pojęciem mechatroniki rozumiemy synergiczną kombinację mechaniki, elektronicznego sterowania i systemowego myślenia przy projektowaniu wytworów i procesów produkcyjnych. Podobne merytorycznie definicje, pojęcia „mechatroniki” podają inne organizacje i instytucje naukowe, techniczne i normalizacyjne.
W tym także komisja doradcza Unii Europejskiej do Spraw Badawczo-Rozwojowych (po ang. Industrial Research and Development Advisory Committee of the European Community - IRDAC)
Synergia - z łac. Synergos - współpracujący, współdziałający
Ale w rozumieniu synergiczne współdziałanie całość jest większa niż suma części.
Historycznie po raz pierwszy terminem mechatronika nazwano mechatroniczny sterownik elektroniczny silnika elektrycznego opracowany w 1951 roku w japońskiej firmie Yaskawa Eletric Corporation przy czym nazwę tę chroniono znakiem handlowym. W 1982r zastrzeżenia patentowe zostają zdjęte, a w 1986 wprowadzono tę nazwę w język techniczny. W Polsce prof. Tyliński na Politechnice Warszawskiej należy do jednych z pierwszych, którzy wprowadzili ten termin w latach 80.
W 1996 roku w Warszawie powstaje pierwszy wydział Mechatroniki.
W 2005 roku Ministerstwo zatwierdza kierunek o nawie Mechatronika.
W 2008 roku Państwowej Wyższej Szkole Zawodowej w Nowym Sączu przyznano prawo kształcenia studentów na kierunku mechatronika.
Urządzenia i maszyny mechatroniczne różnią się od innych maszyn mechanicznych lub elektronicznych o identycznym przeznaczeniu lub zasadzie działania, wyposażeniem:
Zintegrowany programowany sterownik mikroprocesorowy.
Przy czym najbardziej charakterystyczną cechą jest zmniejszona liczba i zakres działania elementów i zespołów mechanicznych systemu.
Wprowadzenie elektronicznych układów automatycznego sterowania i regulacji parametrów systemu rozwiązujących zadania prowadzenia, koordynacji, nadzoru i optymalizacji procesów realizowanych przez system.
Wykorzystywanie w możliwie największym zakresie niematerialnych możliwości kształtowania właściwości systemu.
Dążenie do wykorzystywania i ścisłej współpracy w systemie elementów i zespołów o różnych zasadach działania pochodzących z różnych dziedzin techniki
Stopniowym przechodzeniem od rozwiązań mechanicznych do mechatronicznych jest ewolucja urządzeń do zapisu i odtwarzania dźwięków od fonografu wynalezionego przez Tomasza Edisona w 1877 roku poprzez gramofony mechaniczne, elektryczne, magnetofony do odtwarzacza CD.
Wprawiający w ruch nośnik informacji - elementy mechaniczne zostały zredukowane do korpusu obudowy odtwarzacza oraz dotykowych sensorów sterujących jego działaniem.
W zakresie projektowania konwencjonalnego i mechatronicznego występują istotne różnice w projekcie konwencjonalnym - ma tradycyjną koncepcje rozwiązania, w projekcie mechatronicznym studium wiele możliwych rozwiązań powstałych na podstawie niekonwencjonalnych metod uwzględniających synergię podukładów mechanicznych, elektronicznych.
Klasycznie otrzymujemy przedmiot ciężki łączący okablowanie, różne kadłuby w projekcie mechatronicznym zwarty, zamknięty we wspólnym kadłubie produkt powstały ze zintegrowanych elementów.
Jest to możliwe dzięki współdziałaniu specjalistów różnych dziedzin wynikającej ze struktury mechatronicznego podejścia.
Zastosowanie mikroelektroniki w inżynierii mechanicznej
Programowalne urządzenia i systemy mechaniczne z sensoryką, aktoryką i komunikacją.
Projektowanie systemów, urządzeń i produktów zorientowanych na osiągnięcie optymalnej równowagi między podstawą strukturalną, mechaniczną i jej całkowitym sterowaniem
Synergiczna integracja inżynierii mechanicznej, inżynierii elektrycznej i techniki informacyjnej dla zintegrowanego projektowania inteligentnych systemów - w szczególności mechanizmów i maszyn.
Ewolucja mechatroniki z inżynierii mechanicznej
Ewolucja mechatroniki ma ogromny wpływ na strukturę nowych maszyn, oraz na sposób ich projektowania i konstruowania. Dokumentacja maszyny powstaje już nie tylko w biurze konstrukcyjnym, Lecz także w laboratorium mikroprocesorowym i laboratorium oprogramowania. Bardzo ważnym elementem staje się wzajemne porozumiewanie się konstruktorów, mechaników z elektronikami i informatykami.
Rys.1 Ewolucja mechatroniki z techniki mechanicznej |
W 1926 roku angielski inżynier Constantinesco pochodzenia rumuńskiego, wprowadził pojęcie neomechaniki ( nowa mechanika) formułując zasadę przepływu energii wyróżniając 3 rodzaje:
Mechaniczną
Płynną
Elektryczną
Synergizm tych układów nazwał neomechaniką.
Można stwierdzić, że neomechanika była pierwszym etapem formułowania się układów sterowanych a więc układów mechatronicznych.
Rozwój mechaniki
Rys.2 Rozwój systemów technicznych jako ubywanie funkcji operacyjnych, wykonywanych przez człowieka-operatora
Mechatronika - przykłady:
Ćwiczenie:
Własne Wnioski
Rys. 3 i Rys. 4 Samochód układy - ABS, ASR, ESP |
Układ o podwójnym krążku utrzymywany jest podpórką p i pozostaje w pionie. Wyznaczyć z jakim a1 będzie poruszać się Q1 po usunięciu podpórki p oraz wyznaczyć napięcie S1 w linie podwieszającej ciężar Q1.
Rysunek 1
Wynika z tego, że ruch będzie się odbywał następująco: ciężarek Q2 będzie się poruszał do góry, a ciężarek Q1 w dół.
W rozwiązywaniu zagadnień posiłkujemy się … oznacza to, że dany układ zastępujemy 3 podukładami a przecięcia siłami:
Korzystamy z zasady d'Alamberta, która mówi: jeżeli do układu sił zewnętrznych dodamy siłę wartości to możemy zastosować warunek równowagi (nie uwzględniamy masy krążka)
Aby rozwiązać takie zadanie musimy rozwiązać układ 4 równań:
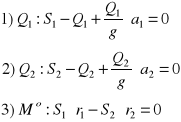
Z równań więzów wiemy, że:
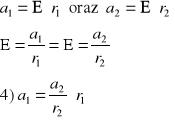
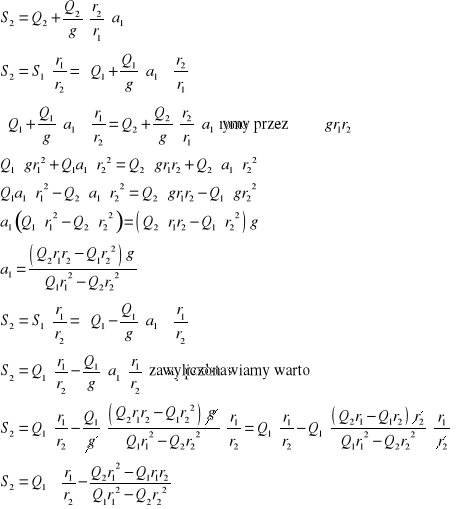
Rozwiązujemy układ równań 1) - 4) :
Mechatronika jest bardzo ważnym przedmiotem w dzisiejszych czasach ponieważ:
- Pozwala wykorzystać w większej mierze pracę umysłową człowieka
- W wielu rzeczach ułatwia nam życie
Strona 3 z 5
Wykład przeprowadził:
prof. dr hab. inż. J. Wojnarowski
Dnia:
20.10.2008r
Dane:
Q1,r1,Q2,r2
oraz ![]()
Wyszukiwarka
Podobne podstrony:
Wyznaczanie przyśpieszenia ziemskiego za pomocą wahadła matematycznego, PWSZ Nowy Sącz, I semestr, W
Wstęp do mechatroniki samochodowej, PWSZ Nowy Sącz, I semestr, WPROAWADZENIE DO MECHATRONIKI, Mechat
Układy techniczne i wielkości je opisujące, PWSZ Nowy Sącz, I semestr, WPROAWADZENIE DO MECHATRONIKI
szablon ćw.6, PWSZ Nowy Sącz, II semestr, METROLOGIA I SYSTEMY POMIAROWE, Metrologia
lab mikroskop, PWSZ Nowy Sącz, II semestr, NAUKA O MATERIAŁACH, Metaloznawstwo
szablon ćw.4, PWSZ Nowy Sącz, II semestr, METROLOGIA I SYSTEMY POMIAROWE, Metrologia
szablon ćw.3, PWSZ Nowy Sącz, II semestr, METROLOGIA I SYSTEMY POMIAROWE, Metrologia
wykresy dla nm, PWSZ Nowy Sącz, II semestr, NAUKA O MATERIAŁACH, ćw6 - ćwiczenia
sprawozdanie nr.2, PWSZ Nowy Sącz, II semestr, METROLOGIA I SYSTEMY POMIAROWE, Metrologia
miwm rozciaganie[1], PWSZ Nowy Sącz, II semestr, NAUKA O MATERIAŁACH
312437, PWSZ Nowy Sącz, II semestr, NAUKA O MATERIAŁACH
stal 18H2N2, PWSZ Nowy Sącz, II semestr, NAUKA O MATERIAŁACH, ćw7-ćwiczenia
Metrologia1, PWSZ Nowy Sącz, II semestr, METROLOGIA I SYSTEMY POMIAROWE, Metrologia
węgliki c6, PWSZ Nowy Sącz, II semestr, NAUKA O MATERIAŁACH, ćw6 - ćwiczenia
C7- Hartowność stali-finał, PWSZ Nowy Sącz, II semestr, NAUKA O MATERIAŁACH, ćw7-ćwiczenia
Metoda hartowania czołowego, PWSZ Nowy Sącz, II semestr, NAUKA O MATERIAŁACH
Żywienie pozajelitowe W2, Materiały Dietetyka, PWSZ (Nina nevermind), Nowy folder, semestr VI (Nina
Zagadnienia semestr VI, Materiały Dietetyka, PWSZ (Nina nevermind), Nowy folder, semestr VI (Nina ne
więcej podobnych podstron