Zaprojektować chwytak do manipulatora przemysłowego spełniającego wymagania:
w procesie transportu urządzenie chwytające ma za zadanie pobrać (uchwycić) obiekt w położeniu początkowym, trzymać go w trakcie trwania czynności transportowych i uwolnić go w miejscu docelowym.
obiektem transportu są wałki i tuleje o zakresie średnic d = 20÷100 mm, długości l = 20÷200 mm z mosiądzu lub stali.
manipulator zasilany jest sprężonym powietrzem o ciśnieniu nominalnym pn = 0,6 Mpa
Schemat kinematyczny:
Obliczenie ruchliwości chwytaka.
w = 3n - 2p5 - p4
gdzie:
n=5 -liczba członów chwytaka,
p5=(0,1),(1,2),(1,2'),(2,3),(2',3'),(0,3),(0,3')=7 -pary kinematyczne V klasy,
p4=0 -pary kinematyczne IV klasy,
w = 3*5 - 2*7 - 0 = 1
Analiza zadania projektowego i ustalenie listy wymagań:
Wymiary transportowanego obiektu:
d = 180 [mm] - średnica największego wałka
G = 150 [N] - ciężar danego ciała
g = 9,81 [m/s2] - przyspieszenie ziemskie
n = 2 - wsp. przeciążenia chwytaka
μ = 0,3 - wsp. tarcia
2γ = 120o - kąt nachylenia szczęk chwytaka
Wyznaczenie maksymalnej koniecznej siły chwytu Fchmax i minimalnego wymiaru szczęki:
Układ sił działających na chwytak
a.) rozkład sił tarcia podczas chwytania obiektu
b.) rozkład sił normalnych podczas chwytania obiektu
Wyznaczamy siły chwytu:
![]()
![]()
![]()
Dla prawidłowego uchwycenia transportowanego elementu musi być spełniony warunek:
![]()
![]()
![]()
Więc ![]()
wynosi: ![]()
[N]
Wyznaczenie minimalnego wymiaru szczęk:
![]()
![]()
![]()
Po wstawieniu wartości liczbowych otrzymuję:
![]()
[mm]
![]()
[mm]
Szerokość szczęki a wynosi:

stąd ![]()
więc ![]()
[mm]
Natomiast wysokość h wynosi:
![]()
więc ![]()
Ostatecznie przyjmuje, że h = 40 [mm]
Wyznaczenie charakterystyki przesunięciowej chwytaka:
W celu rozwiązania zadania metodą analityczną przyjmujemy układ współrzędnych Oxy.
W schemat kinematyczny mechanizmu wpisujemy zamknięty wielobok wektorowy. Oznaczamy kąty jakie tworzą wektory z osią x układu współrzędnych. Dla przyjętego wieloboku możemy napisać równanie wektorowe:
Dane:
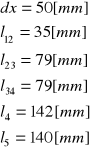
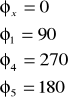
![]()
czyli ![]()
Rozwiązanie:
1.) ![]()
2.) ![]()
1.) ![]()
2.) ![]()
1.) ![]()
2.) ![]()
Podnosząc powyższy układ do kwadratu i dodając stronami mamy:
Oznaczając:
Mamy:
x2 + a*x + b = 0 oraz y = l4 - l32*cosΦ 3
Powyższe równania są parametrycznym równaniem charakterystyki przesunięciowej
y(Φ 3) = fp[x(Φ 3)] zależnymi od kąta Φ3.
Wyznaczenie charakterystyki prędkościowej chwytaka:
Charakterystykę prędkościową chwytaka otrzymujemy obliczając pochodną względem czasu.
Otrzymujemy więc:

Po obróceniu układu o kąt Φ2:
![]()
![]()
Z wyrażenia 2 wyliczamy sinϕ2 a następnie ϕ2 w zależności od ϕ3 i podstawiamy do równania powyżej:
![]()
Prędkość końcówki chwytnej chwytaka:
![]()
Charakterystyka prędkościowa chwytaka:

![]()
Poniżej wykres zależności prędkościowej fv(x) (zależnej od ϕ3 ):
Wyznaczenie charakterystyki siłowej chwytaka:
gdzie: Fs - siła na wyjściu zespołu napędowego (siłownika) chwytaka,
Fch - siła chwytu (![]()
),
fF(x) - przełożenie siłowe mechanizmu chwytaka.
Model obliczeniowy z zaznaczonymi siłami działającymi na poszczególne człony:
Analiza sił w kolejnych grupach strukturalnych:
1. 2.
3.
Ad.1
![]()
Ad.2

Ad.3
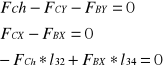
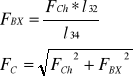
FBX = 778.3 [N]
FC = 890.64 [N]
Ostatecznie
![]()
FS = 1556.6 [N]
Oraz dla położenia równowagi
![]()
fF(x)=0.28
Sprawdzenie metodą mocy chwilowych charakterystyki siłowej chwytaka.
Bilans mocy chwilowych przy pominięciu tarcia, sił ciężkości oraz bezwładności:
NWE + NWY = 0
Model chwytaka do wyznaczenia bilansu mocy chwilowych
Stąd:
Poniżej wykres charakterystyki siłowej chwytaka fF(x) (zależnej od ϕ3)
Obliczenia wytrzymałościowe chwytaka:
Sprawdzenie warunku wytrzymałościowego na zginanie ramion chwytaka:
Maksymalny moment gnący wynosi:
Mg max = Fch*l32 = 61,5 [Nm]
Przyjmując przekrój prostokątny ramienia o wymiarach:
b=13[mm]
h=13[mm]
oraz materiał ramienia St6 dla którego:
![]()
obliczono
Sprawdzenie warunku wytrzymałościowego na ścinanie dla najbardziej obciążonego sworznia:
Z warunku wytrzymałościowego na ścinanie sworznia w punkcie C sprawdzono jego wytrzymałość.
Założenia:
ds=8 [mm] - średnica sworznia
Re=280 [MPa] - dla materiału sworznia (45)
Obydwa warunki wytrzymałościowe zostały zachowane.
Obliczenie wymaganych parametrów napędu pneumatycznego chwytaka:
Model siłownika pneumatycznego dwustronnego działania
Siłownik dobieram zgodnie z zasadą:
![]()
gdzie:
![]()
- teoretyczna siła pchająca lub ciągnąca
![]()
- obliczona wymagana siła na tłoczysku
![]()
- współczynnik przeciążenia
![]()
- maksymalna siła na tłoczysku siłownika potrzebna do uzyskania
maksymalnej siły chwytu
W moim przypadku wymagana siła na tłoczysku wynosi:
![]()
Teoretyczną siłę pchającą lub ciągnącą obliczamy z następujących wzorów:
siła pchająca:
|
siła ciągnąca:
|
gdzie:
![]()
- ciśnienie nominalne zasilania
Zgodnie z zasadą
![]()
Wyliczamy minimalną średnicę tłoka, równą:

czyli minimalna średnica tłoka powinna wynosić:
![]()
Dobór siłownika z katalogu firmy FESTO
Na podstawie powyższych obliczeń wybrano odpowiedni siłownik z katalogu firmy FESTO ADVULQ-50--P-A o następujących parametrach:
Siłownik kompaktowy z bezdotykową sygnalizacją położenia, zabezpieczenie przed obrotem w postaci kwadratowego tłoczyska.
dwustronne działanie;
średnica tłoczyska: 50 [mm];
skok minimalny: 1 [mm];
skok maksymalny: 300 [mm];
ciśnienie operacyjne minimalne: 0.8 [bar];
ciśnienie operacyjne maksymalne: 10 [bar];
siła pchająca: 1178 [N];
siła ciągnąca: 1057 [N];
Do siłownika dobrano także płytkę montażową typu FUA-63.
![]()
![]()
![]()
![]()
n
p
d
D
Wyszukiwarka
Podobne podstrony:
3386
3386
3386
200401 3386
3386
3386
więcej podobnych podstron