Układy inercjalne i nieinercjalne, siła Coriolisa
Układy odniesienia znajdujące się w spoczynku lub poruszające się ruchem jednostajnym prostoliniowym względem układu inercjalnego są układami inercjalnymi. Natomiast układy poruszające się ze zmienną prędkością lub obracające się względem układu inercjalnego nazywamy układami nieinercjalnymi.
Układy w których obowiązuje I zasada dynamiki są układami inercialnymi
Zasada Galileusza wszystkie układy inercjalne są sobie równoważne każde zjawisko przebiega identycznie w dowolnym U.I. W układzie nie inercjalnym można stosować zasady dynamiki jeżeli uwzględnimy siłę unoszenia np.: siła bezwładności, odśrodkowa, Coriolisa. Układ związany z Ziemią jest U.NI. efektem tego jest siła coriolisa która działa na ciało poruszające się na powierzchni. Np.: niże na półkuli N kręcą się w lewo.
Elementy teorii względności
LORENTZ
Długość (kontrakcja)
Jeżeli w układzie odniesienia względem, którego ciało znajduje się w spoczynku, dł. ciała jest równa l0 to w układzie odniesienia względem którego ciało porusza się z prędkością V długość ciała będzie równa 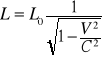
Wymiary poprzeczne nie ulegają skróceniu, skróceniu ulega tylko wymiar równoległy do kierunku ruchu.
Czas (dylatacja)
T(tau)=Δt=t2-t1
Jeżeli w układzie spoczynkowym odstęp czasowy między dwoma ciałami jest równy T0 to odstęp czasowy między tymi zjawiskami w układzie odniesienia poruszającym się z prędkością jest równy

Masa
Jeżeli w układzie względem którego ciało jest w spoczynku masa ciała jest równa m0 to w układzie odniesienia względem którego ciało porusza się z prędkością V jego masa jest równa

Energia
Całkowita energia ciała jest równa E=mC2
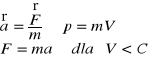
II zasada dynamiki w przypadku relatywistycznym
Zasady Dynamiki w przypadku klasycznym i relatywistycznym.
I zasada dynamiki
Jeżeli na ciało nie działa żadna siał lub wypadkowa działających sił jest równa zeru, to we wszystkich inercjalnych układach odniesienia ciało to będzie spoczywać lub poruszać się ruchem jednostajnym prostoliniowym.
II zasada dynamiki
Jeżeli na ciało o masie m zadziała siła F (lub wypadkowa kilku sił działających na ciało wynosi F), to ciało to będzie poruszać się z przyśpieszeniem proporcjonalnym do działającej siły a odwrotnie proporcjonalnie do masy ciała.
III zasada dynamiki
Jeżeli ciało A działa na ciało B siłą FAB, to równocześnie na ciało A zadziała pochodząca od ciała B siła FBA o tej samej wartości lecz o przeciwnym kierunku. FAB=-FBA
Podstawowe wielkości w ruchu obrotowym bryły sztywnej
Bryła sztywna - takie ciało, w którym odległości pomiędzy poszczególnymi jego elementami nie zmieniają się, niezależnie od działającej siły.
drogi liniowe s1,s2 są różne dla różnych pkt, prędkości liniowe też, natomiast równe są drogi kątowe i prędkości kątowe.
Droga kątowa jest to krąg zakreślony przez promień wodzący.
Prędkość kątowa jest wektorem, który jest równoległy do osi obrotu a jego zwrot określa śruba prawoskrętna. Związek między prędkością liniową i kątową.
![]()
Energia Kinetyczna w ruchu obr i zasada zachowania momentu pędu
Każde obracające się ciało posiada energię kinetyczną. Energia kinetyczna obracającego się ciała jest sumą energii kinetycznych poszczególnych jego elementów.
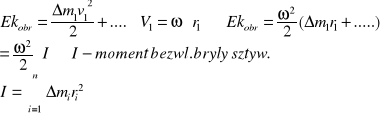
Momenty bezwł.
pkt materialny I=mr2
pierścień I=mr2
walec pełny I=1/2mr2
kula I=2/5mr2
pręt (oś prostopadła środek) I=1/12ml2
pręt (oś prostopadła początek) I=1/3ml2
Twierdzenie Steinera
Jeżeli moment bezwł. bryły sztywnej względem osi l przechodzącej przez środek masy jest równy l0 to moment bezwł. tej bryły względem osi l' równoległej do l odległej od niej o d jest równy ![]()
l'||l
Moment siły
Zmiana prędkości kątowej ciała następuje pod wpływem działania momentów sił. Wartość momentu siły F definiuje się następująco: r-odległość pkt. przyłożenia od osi obrotu
![]()
Zasada zachowania momentu pędu.
Jeżeli moment sił zewnętrznych względem danej osi obrotu jest równy zeru, to moment pędu ciała (lub układu ciał) względem tej osi jest stały.
gdy M=0 to L=const. I1ω1=I2 ω2
![]()
Pole grawitacyjne
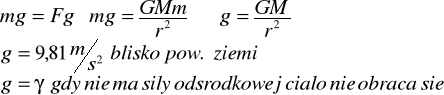
Pr. grawitacji Newtona
2 ciała przyciągają się siłą, która jest wpros proporcjonalna do iloczynu ich mas i odwrotnie proporcjonalna do kwadratu odległości między nimi.
![]()
G-stała grawitacji G=6,67*10-11 [Nm2/kg2]
Prawo grawitacji zapisane wektorowo:
![]()
W każdym pkt pola grawitacyjnego można zdefiniować wielkość wektorową, oznaczającą siłę grawitacji działającą na jednostkę masy- Natężenie pola grawitacyjnego
![]()
Natężenie pola grawitacyjnego nie zależy od masy ciała m a zależy tylko od masy M będącego źródłem pola.
Linie sił pola grawitacyjnego wskazują w przestrzeni wokół źródła kierunek siły grawitacji jaka zadziała na ciało m umieszczone w danym polu.
Przyśpieszenie w polu grawitacyjnym
Prawo Keplera
1 prawo Keplera - wszystkie planety poruszają się po elipsach, w jednym z 2 ognisk elipsy znajduje się Słońce. P-perychelium (pkt najbliższy słońcu) A-adchelium (pkt najdalej oddalony od słońca)
I uogólnione prawo Keplera- wszystkie ciała niebieskie poruszają się po krzywych stożkowych. W ogniskach tych krzywych znajduje się gwiazda.
II prawo Keplera - prędkość polowa planety jest stała. Prędkośc polowa jest polem zakreślonym w jednostce czasu przez promień wodzący planety. Im dalej planeta od słońca tym wolniej się porusza.
II uogólnione prawo Keplera- moment pędu planety jest stały. Pęd to iloczyn masy i prędkości planety.
p=mV L=Pr L=mVr - const v1r1=v2r2
III prawo Keplera Drugie potęgi okresów obiegu planet wokół słońca (T1,T2) są wprostproporcionalne do trzecich potęg wielkich półosi (a1,a2)
![]()
III uzgodnione prawo Keplera- wszystkie ciała układu słonecznego poruszają się po elipsach wokół wspólnego środka masy
![]()
Ruch harmoniczny
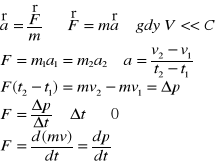
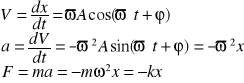
Ruch harmoniczny- ruch w którym przyśpieszenie jest wprostproporcionalne do wychylenia i skierowane do położenia równowagi. A-amplituda drgań, x- położenie cząstki C po czasie t ω- częstość drgań, f- częstotliwość drgań /ilość drgań w 1s/ T- okres drgań/czas 1 drgania/
![]()
Związek pom. ruchem har. a ruchem po okręgu- Cząstka C1 porusza się po okręgu o promieniu A o środku w pkt O ze stałą prędkością kątową ω.T-okres obrotu, f-częstot. obrotu
Drgania tłumione
W przyrodzie występują siły tarcia, które zmniejszają siłę drgań dlatego w realnych ośrodkach występują drgania tłumione a nie harmoniczne
A'=A0e -Bt i B-stała tłumienia
![]()
Aby otrzymać drgania harmoniczne /o stałej amplitudzie A/ trzeba uzupełniać straty energii w każdym okresie
Energia drgań

Podczas drgań harmonicznych następuje ciągła przemiana Ek w Ep i odwrotnie ale zawsze suma tych energii pozostaje stała.
Wahadło fizyczne i matematyczne
Wahadłem fizycznym nazywamy bryłę sztywną zawieszoną na osi obrotu nie przechodzącą przez środek masy
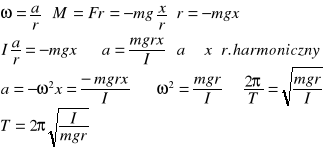
O-środek obrotu, S-środek ciężkości
wahadło matematyczne- pkt materialny zawieszony na nieważkiej i nierozciągliwej nici.
Pole elektrostatyczne
P.elek.-przestrzeń, w której na ładunek elektryczny działa siła, miarą tego pola jest jego natężenie oraz indukcja elektryczna.
Natężenie pola elektrycznego- stosunek siły działającej na umieszczony w tym polu ład. próbny do jego wartości
Pr. Coulomba: Dwa ładunki pkt odziaływują na siebie siłą, która jest wprostporpor. do iloczynu ich wartości i odwrotnie proporc. do kw. odległości między nimi.
k-wsp. propor. zal. od ośrodka
ład. różnoimienne przyc., ład. równoimienne odpycha. rys.
Pr. Columba w zapisie wektorowym
ten sam rys.
![]()
Pr. Gaussa Całkowity strumień indukcji przechodzący przez dowolną pow. jest równy sumie ładunków znajdujących się wew. tej pow.
![]()
Praca w Polu elktr.
Praca w polu elektr. jest polem zachowawczym ponieważ praca w tym polu nie zależy drogi tylko od różnicy potencjałów.

Potencjał pola elektrycznego w danym pkt nazywamy pracę którą wykona pole dla przesunięcia ładunku jednostkowego z tego pkt do nieskończoności albo jest to stosunek energii potencjalnej jaką ma ład. w tym pkt do jego wartości.

WAB -praca sił pola przy przesunięciu ładunku z pkt A do pkt B pola elektro.
q- przesuwany ładunek
Rozmieszczenie ładunków na przewodniku
Ładunek gromadzi się na zew. pow. przewodnika
Pojemność elektryczna
pojemność- określa zdolność przewodnika do gromadzenia ładunków elektrycznych. Stosunek ładunku do potencjału wytworzonego na przewodniku.
C=Q/V [farad]
Kondensatory są układami, które przy niewielkich rozmiarach mają b. dużą pojemność.
Prąd elektryczny
Jest to ruch swobodnych ładunków wywołany różnicą potencjałów
![]()
Natężenie prądu elektrycznego stałego
Jest to stosunek ładunku przepływającego przez poprzeczny przekrój przewodnika do czasu jego przepływu: I=Q/t [A]=[C/s] Ładunek ma wartość 1 Culomba, gdy przez przewodnik w czasie 1 sekundy przepłynie prąd o natężeniu 1 Ampera
Prawo Omha
Natężenie prądu zależy wprost proporcjonalnie od napięcia I=U/R Prawo Ohma jest spełnione tylko wtedy, gdy opór nie zależy od napięcia ani od natężenia prądu.
Praca prądu elektrycznego:

Moc prądu elektrycznego P=W/t [J/s]=[W]
Siła elektromotoryczna Miarą SEM ogniwa jest różnica potencjałów między elektrodami gdy nie czerpiemy prądu elektrycznego: E(epsilon)=W/Q [V]
I pr. Kirchoffa
Suma natężeń wchodzących do węzła sieci elektrycznej jest równa sumie natężeń prądów wychodzących z punktu węzłowego.
I1+I2-I3-I4=0
II Pr. Kirchoffa
Jeżeli w obwodzie prądu albo zamkniętej części obwodu, przyjmiemy jako dodatni kierunek zgodny z ruchem wskazówek zegara to suma iloczynów natężeń i oporów gałęzi będzie równa sumie sił elektromotorycznych znajdujących się w tym obwodzie
![]()
Pole magnetyczne
P.mg przestrzeń, w której na biegunie magnetycznym działa siła, biegunów nie da się rozdzielić.
Pr. Gausa dla magnetyzmu:
Całkowity strumień indukcji magnetycznej przez dowolną pow. zamkniętą jest równy 0. zawsze ilość linii pola magnetycznego wychodzących z pow. zamkniętej będzie równa ilości linii sił wchodzących.
Pole magnetyczne prądu elek. Oersted odkrył: przewodnik z prądem wytwarza pole mag., linie sił tego pola są okręgami współśrodkowymi z tym przewodnikiem. Zwrot ich określa reguła śruby prawoskrętnej.
H=I/2Пr [A/m] pole mag. przewodnika prostoliniowego niesk. długiego.
H=I/2r pole mag przewodnika kołowego.
H=Ni/l n-ilość zwoii, I- natężenie, l-dł.
Siła elektrodynamiczna jest to siła, która działa na przewodnik z prądem umieszczony w polu magnetycznym
Falowa i kwantowa teoria światła
Wyszukiwarka
Podobne podstrony:
7679
7679
praca-magisterska-wa-c-7679, Dokumenty(2)
7679
7679
7679
więcej podobnych podstron