Ruch elementu płynu
W kinematyce ciała sztywnego dowodzi się, że w ogólnym przypadku ruch ciała sztywnego składa się w każdej chwili z ruchu postępowego i obrotowego dokoła pewnej osi, zwanej chwilową osią obrotu. Ruch płynu jest znacznie bardziej skomplikowany, ponieważ każdy element płynu porusza się nie tylko ruchem postępowym i obrotowym, lecz podlega również odkształceniu (deformacji). Ostatnie zjawisko wymaga zatem zbadania tak zwanego ruchu deformacyjnego.
Rozpatrzmy w dowolnej chwili ruch nieskończenie małego elementu płynu. Niech w pewnym punkcie M (x, y, z) wewnątrz elementu (rys. 1) składowymi prędkości będą vx(x, y, z), vy(x, y, z), vz(x, y, z).
Rys. 1
Składowe prędkości w pewnym punkcie M1(x+x1, y+y1, z+z1) na powierzchni elementu mogą być wówczas napisane w postaci
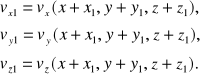
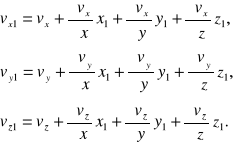
Wykorzystując rozwinięcie na szereg Taylora i zachowując jedynie wielkości małe pierwszego rzędu, czyli człony zawierające x1, y1, z1 w potędze nie wyższej niż pierwsza, otrzymamy następujący wzór na prędkości vx1, vy1, vz1:
![]()
(1)
w których dla uproszczenia podstawiono vx=vx(x, y, z), vy=vy(x, y, z), vz=vz(x, y, z). Przekształćmy teraz te wzory. W tym celu dodamy do prawej strony pierwszego równania (1) wielkości
oraz
dokonamy przegrupowania wyrazów.
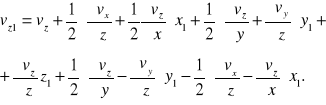
Ostatecznie otrzymamy
skąd
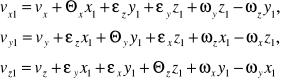
Za pomocą analogicznych przekształceń można z drugiego i trzeciego równania (1) otrzymać
![]()
Dla uproszczenia wprowadźmy oznaczenia:
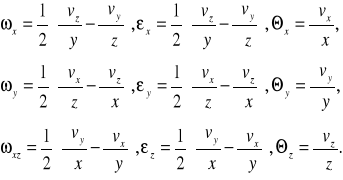
(2)
Otrzymane powyżej wyrażenia na vx1, vy1 i vz1 można wówczas napisać w postaci:
(3)
Wprowadźmy następującą pomocniczą funkcję:
![]()
(4)
Której pochodne względem współrzędnych x1, y1, z1 mają postać
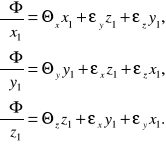
(5)
Za pomocą funkcji Φ możemy napisać wzory na rzuty prędkości w następującej skróconej postaci:
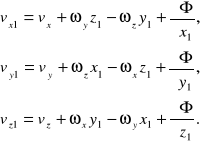
(6)
![]()
Wyjaśnijmy fizyczny sens równań (6).
Wyrazy vx, vy i vz są oczywiście rzutami prędkości przesuwania się w przestrzeni rozpatrywanej cząstki jako ciała sztywnego.
Wykorzystajmy rozwiązanie zadania z mechaniki teoretycznej o obrocie ciała sztywnego do koła nieruchomej osi i zauważmy, że różnice
ωyz1-ωzy1, ωzx1-ωxz1, ωxy1-ωyx1 wyrażają rzuty prędkości kątowej elementu płynu (oraz ciała sztywnego) dookoła chwilowej osi, przechodzącej przez punkt M. Taki ruch obrotowy elementu płynu nazywany jest ruchem wirowym, a składowe prędkości kątowej ωx, ωy, ωz - składowymi wiru.
Jak wynika z równań (2)
![]()
(2')
Wyjaśnimy z kolei sens składników
![]()
Z rozważań fizycznych widać wyraźnie przede wszystkim to że element płynu, na skutek różnicy prędkości w różnych jego punktach, będzie ulegać deformacji. Wynika stąd bezpośrednio, że wyrażenia
![]()
stanowią składowe prędkości deformacji elementu. Udowodnimy to na prostym przykładzie.
Niech nieskończenie mały element płynu ma w chwili t kształt prostokątnego równoległościanu. Dla uproszczenia rozpatrzymy rzuty tego elementu na płaszczyznę x, y, to znaczy nieskończenie mały prostokąt MBDC (rys.2)
Rys2
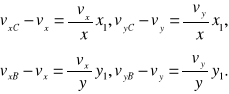
Jeżeli składowe prędkości punktu M(x,y) prostokąta oznaczymy przez vx i vy, wówczas możemy napisać składowe prędkości w punktach C(x+x1,y) oraz B(x, y+y1) z dokładnością do małych pierwszego rzędu w postaci:
(7)
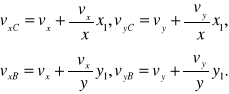
Ponieważ interesuje nas względne przesunięcie punktów C i B (względem punktu M), przepiszemy równania (7) w następujący sposób:
![]()
Jak widzimy, prędkości
oraz
są prędkościami liniowej deformacji boków prostokąta MDBC. Natomiast prędkości
![]()
oraz ![]()
![]()
wskazują na obrót boków MC i MB (rys. 2), są zatem prędkościami
deformacji postaciowej prostokąta MBDC przekształcającymi go w pewien równoległobok (linia kreskowana na rys. 2). Widzimy, że bok MC obraca się z prędkością kątową
bok zaś MB - z prędkością kątową
Ponieważ prędkość zmiany kąta prostego MBC składa się z prędkości kątowych obrotu boków MC i MB, stanowi ona zatem sumę
Rozważając w sposób analogiczny inne boki równoległościanu (albo ich rzuty na płaszczyzny współrzędnych), można równie prosto dowieść, że wielkość
stanowi prędkość deformacji liniowej wzdłuż osi z oraz że wielkości prędkości kątowych odkształcenia postaciowego pozostałych kątów prostych równoległościanu są wyrażone przez zależności
i
Z powyższego wynika, że wielkości
są istotnie składowymi prędkości deformacji elementu płynu, przy czym wielkości εx,εy i εz określają odkształcenia postaciowe, zaś wielkości Θx Θy , i Θz - deformację liniową (rozciąganie lub ściskanie).
Powracając do równań (6), których sens fizyczny został całkowicie wyjaśniony, dochodzimy do następującego ważnego wniosku :
Elementarny ruch elementu płynu składa się z ruchu postępowego jego środka z prędkością
obrotu z prędkością kątową
dookoła pewnej osi przechodzącej przez ten środek oraz ruchu reformacyjnego określonego funkcją
Niech nieskończenie mały element płynu ma w pewnej chwili t kształt kuli, której środek leży w punkcie O(x, y, z,) i której promień równa się a (rys 3).
Rys. 3
Obierzemy ruchome osie współrzędnych x1, y1, z1 (równoległe do nieruchomych osi x, y, z) w ten sposób, aby początek układu znajdował się w środku kuli, oraz aby układ przesuwał się ruchem postępowym wraz ze środkiem kulistego elementu płynu. Niech składowe prędkości środka O elementu będą vx0, vy0, vz0.
Na podstawie powyższego możemy wówczas podać składowe prędkości dowolnego punktu N(x1, y1, z1) na powierzchni elementu w następującej postaci:
Łatwo przekonać się, że funkcja , będąc jednorodnym wielomianem drugiego stopnia względem współrzędnych x1, y1, z1, stanowi powierzchnię drugiego stopnia mającą środek symetrii leżący w początku układu współrzędnych - jest to elipsoida, zwana elipsoidą deformacji.
Jeżeli osie współrzędnych x1, y1, z1, skierujemy wzdłuż osi elipsoidy deformacji wówczas - jak wiadomo - znikną wyrazy zawierające iloczyny współrzędnych różnorodnych. Osie elipsoidy deformacji nazywamy głównymi osiami deformacji.
Przy takim wyborze osi będziemy mieli :
a zatem
co oznacza, że wzdłuż głównych osi deformacji zachodzą jedynie deformacje liniowe.
Rozpatrywany przez nas element płynu ma w chwili początkowej (przed deformacją) kształt kulki. Napiszemy równanie tej kulki w postaci
Oznaczmy przez x2,y2,z2 współrzędne (względem środka O), jakie będzie miał punkt N elementu po upływie nieskończenie małego odcinka czasu dt. Ograniczając się do rozpatrzenia jedynie ruchu reformacyjnego, możemy wówczas na podstawie wzoru (9) napisać :
gdyż
są prędkościami deformacji.
Stąd:
Podstawiając wartości x1,y1,z1, do równania kuli, otrzymamy
Równanie (10) jest równaniem elipsoidy z półosiami:
Zatem nieskończenie mała kula deformując się zmienia się w nieskończenie małą elipsoidę, której osie skierowane są wzdłuż głównych osi deformacji (rys3).
Znajdźmy teraz zmianę objętości rozpatrywanego, nieskończenie małego elementu.
W tym celu musimy od objętości elipsoidy odjąć objętość kulki:
gdzie
współczynnik rozszerzalności objętościowej.
Jeżeli płyn jest nieściśliwy, wtedy współczynnik rozszerzalności objętościowej Θ=0, otrzymamy więc znane równanie ciągłości dla płynu nieściśliwego
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()


![]()
![]()
![]()
(10)
![]()
![]()
![]()
![]()
(9)
