87
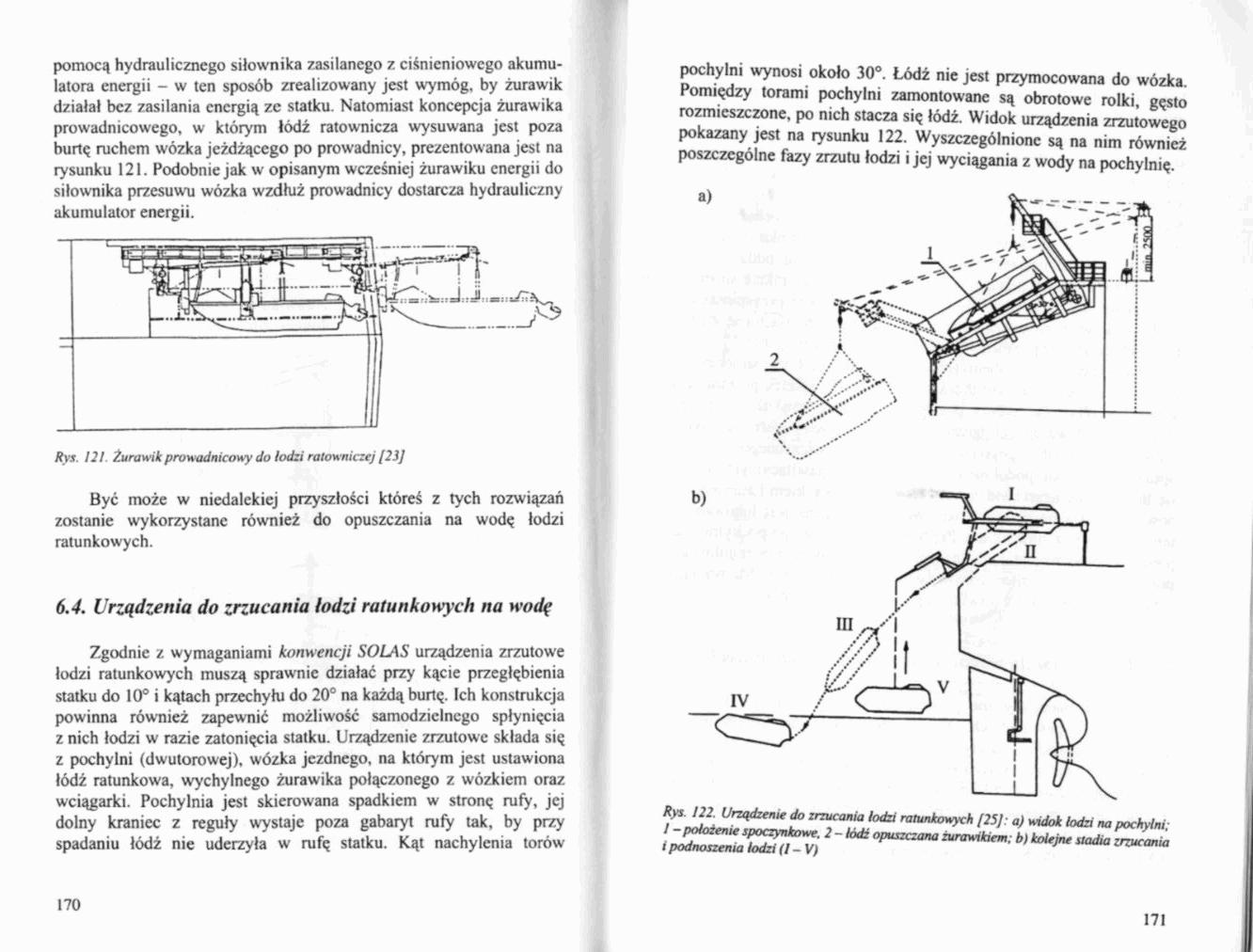
pomocą hydraulicznego siłownika zasilanego z ciśnieniowego akumulatora energii - w ten sposób zrealizowany jest wymóg, by żurawik działał bez zasilania energią zc statku. Natomiast koncepcja żurawika prowadnicowego, w którym łódź ratownicza wysuwana jest poza burtę ruchem wózka jeżdżącego po prowadnicy, prezentowana jest na rysunku 121. Podobnie jak w opisanym wcześniej żurawiku energii do siłownika przesuwu wózka wzdłuż prowadnicy dostarcza hydrauliczny akumulator energii.
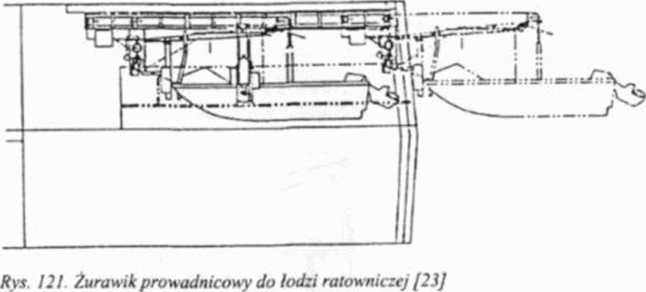
Być może w niedalekiej przyszłości któreś z tych rozwiązań zostanie wykorzystane również do opuszczania na wodę łodzi ratunkowych.
6.4. Urządzenia do zrzucania lodzi ratunkowych na wodę
Zgodnie z wymaganiami konwencji SOLAS urządzenia zrzutowe łodzi ratunkowych muszą sprawnie działać przy kącie przegłębienia statku do 10° i kątach przechyłu do 20° na każdą burtę. Ich konstrukcja powinna również zapewnić możliwość samodzielnego spłynięcia z nich łodzi w razie zatonięcia statku. Urządzenie zrzutowe składa się z pochylni (dwutorowej), wózka jezdnego, na którym jest ustawiona łódź ratunkowa, wychylnego żurawika połączonego z wózkiem oraz wciągarki. Pochylnia jest skierowana spadkiem w stronę rufy, jej dolny kraniec z reguły wystaje poza gabaryt rufy tak, by przy spadaniu łódź nie uderzyła w rufę statku. Kąt nachylenia torów pochylni wynosi około 30°. Łódź nic jest przymocowana do wózka. Pomiędzy torami pochylni zamontowane są obrotowe rolki, gęsto rozmieszczone, po nich stacza się łódź. Widok urządzenia zrzutowego pokazany jest na rysunku 122. Wyszczególnione są na nim również poszczególne fazy zrzutu łodzi i jej wyciągania z wody na pochylnię.
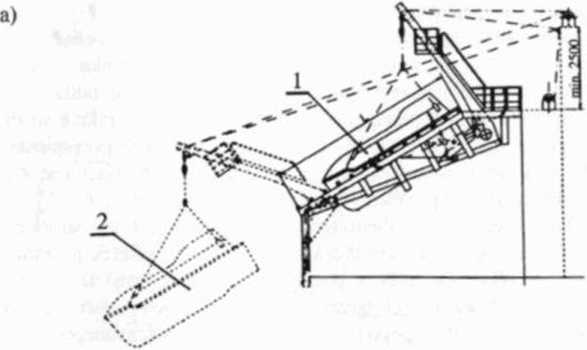
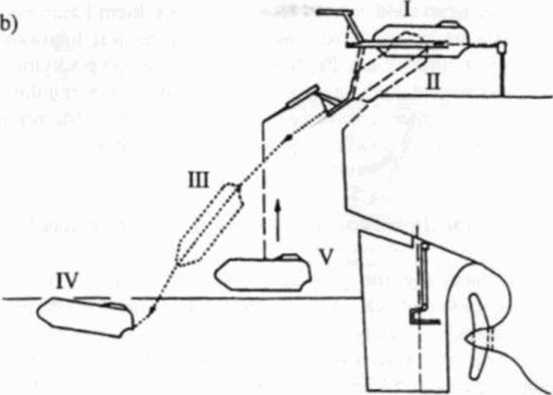
Rys. 122. Urządzenie do zrzucania lodzi ratunkowych (25J: a) widok łodzi na pochylni. / - położenie spoczynkowe. 2 - łódź opuszczana żurawikiem. b) kolejne stadia zrzucania i podnoszenia łodzi (I - V)
171
Wyszukiwarka
Podobne podstrony:
2. Energia słoneczna Spośród wszystkich metod otrzymywania energii, ten sposób jest najbezpieczniejs
39. ZASILANIE POTRZEB WŁASNYCH STACJI 624 źródeł energii. Unika się w ten sposób konieczności
IMAG0273 (Kopiowanie) Mai silnik hydrauliczny siłownik zawór dławiący- zawór zwrotny rozdzielacz zaw
IMAG0274 (Kopiowanie) silnik hydrauliczny > — siłownik zawór dławiący zawór zwrotny b) rozdzielac
Image69 CZYNNOŚCI KONTROLNE Napełnianie instalacji hydraulicznej Patrz strona 76 Akumulator Typ . 12
S1052946 UKŁADY HYDRAULICZNE - CD , Regulowane" napędy hydrauliczne mierzą rzeczywiste ciśnieni
Obliczenia hydrauliczne węzła cieplnego DOBÓR LICZNIKÓW ENERGII CIEPLNEJ Licznik główny -
Obliczenia hydrauliczne węzła cieplnego ciśnienie dopuszczalne wody sieciowej Pa 16,00
OMiUP t2 Gorski06 Rys. 7.47. Urządzenie sterowe z napędem ręcznym i hydraulicznym siłownikiem typu n
więcej podobnych podstron